
Активные дифференциалы — Журнал «4х4 Club»
Технологии
20 августа 2013
Не так давно набор из трех блокировок казался джиперам пределом мечтаний. Однако сегодня даже кроссоверы способны предложить куда более эффективное управление крутящим моментом. Если говорить о коротких отрезках времени, конечно…
Многочисленные системы блокировок не раз уже описаны на страницах нашего журнала. Они остаются востребованными и незаменимыми на полноценных внедорожниках, но несколько громоздки, а главное – экономически мало обоснованны на более легких машинах.
На сцену все чаще выходят электронные системы раздачи крутящего момента, не только умеющие частично блокировать дифференциал, но и успевающие помочь водителю, вовремя попридержав от проскальзывания одно колесо или, наоборот, подкрутив другое. Их распространению способствует и тот факт, что формат массового автомобиля повышенной проходимости ощутимо сместился из сферы полноценных внедорожников, способных медленно и верно, на второй пониженной, прокладывать себе путь среди леса, в область кроссоверов, для которых ценнее динамичная езда и стабильность управления. Впрочем, если быть точным, то именно кроссоверы и сделали полный привод широко распространенным.
Впрочем, если быть точным, то именно кроссоверы и сделали полный привод широко распространенным.
Torsen. Среди неуправляемых самоблокирующихся дифференциалов этот наиболее простой и «прозрачный»
ИМИТАЦИЯ АКТИВНОСТИСразу оговоримся, что «дифференциальный подход» к тяге на каждом колесе часто реализуется простым подтормаживанием незагруженного колеса автомобиля с дифференциалом обычным, свободным. Этим занята стандартная система ABS, которая в данном случае работает наоборот. Из антиблокировочной она превращается в противобуксовочную – ПБС – и, зажав буксующее колесо, отправляет крутящий момент на противоположное, с лучшим сцеплением. Таким же «тормозным» образом имитируется блокировка дифференциала у тех машин, где ее нет в металле. Например, подобной имитацией оборудованы все Mercedes-Benz M-класса и многие другие кроссоверы.
СУПЕРАКТИВЕН, ГИПЕРАКТИВЕН
Однако это слишком просто – нас же интересует дифференциал, способный перенаправлять поток мощности к левому или правому колесу.
 Подобное устройство применено, например, в BMW X6 и называется Dynamic Performance Control (DPC). Вот это настоящий активный дифференциал. Его конструкция аналогична хорошо известному AYC, с которым не первое десятилетие хорошо знакомы обладатели Mitsubishi Lancer Evolution. Устроен DPC несложно – с обеих сторон блок сателлитов дополнен планетарными редукторами, которые подключены вместо прямой передачи через блоки многодисковых фрикционов. Получается, что на момент включения фрикционов правой или левой стороны дифференциал становится несимметричным – отдающим соответственно направо или налево больше крутящего момента.
Подобное устройство применено, например, в BMW X6 и называется Dynamic Performance Control (DPC). Вот это настоящий активный дифференциал. Его конструкция аналогична хорошо известному AYC, с которым не первое десятилетие хорошо знакомы обладатели Mitsubishi Lancer Evolution. Устроен DPC несложно – с обеих сторон блок сателлитов дополнен планетарными редукторами, которые подключены вместо прямой передачи через блоки многодисковых фрикционов. Получается, что на момент включения фрикционов правой или левой стороны дифференциал становится несимметричным – отдающим соответственно направо или налево больше крутящего момента.«Ах, опять эти ваши фрикционы!» – заметите вы и будете совершенно правы. В любом узле распределения крутящего момента, будь то подключение второго ведущего моста или распределение тяги между колесами, воздействовать на трансмиссию оперативно и при помощи электроники способны только фрикционы.
Так вот, став несимметрично приводным, задний мост начинает разворачивать движущийся автомобиль примерно так же, как поворачивает гусеничный трактор, – разнотягом сторон.
Доворот. Весь смысл хитрого дифференциала – в довороте машины без участия передних колес
ПАРУС ПО ВЕТРУЧто это дает? В первую очередь разнотяг помогает повернуть автомобиль в тех ситуациях, когда сцепления передних повернутых колес оказывается недостаточно. У машины как бы появляется вторая управляемая ось.
Во-вторых, этот же эффект может быть применен наоборот – для стабилизации курсовой устойчивости. «Но есть же система ESP, – возразите вы, – разве она не способна сделать то же самое?» Способна, но лишь наполовину, потому как ESP работает «в минус», подтормаживая вращающееся колесо, снижая тягу на нем, а DPC – «в плюс». Она способна увеличить и скорость вращения колеса, и подводимый к нему момент. Если проще – диапазон возможных воздействий на конкретное колесо вырастает вдвое, позволяя для каждого случая выбирать между замедлением и ускорением, снижением крутящего момента или его увеличением. Выбор зависит от конкретных дорожных условий для каждого колеса.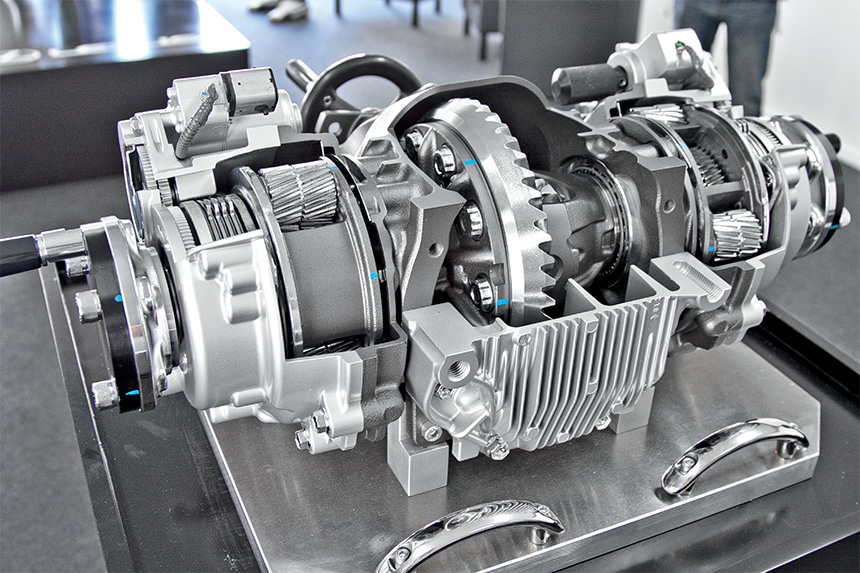
Результат работы активного дифференциала в какой-то мере можно сравнить с индивидуальным приводом каждого колеса, как это сделано у электромобилей с мотор-колесами. Разумеется, подобный подход открывает для электронных систем стабилизации почти неограниченные возможности как по доворачиванию машины на криволинейной территории, так и по удержанию на идеальной прямой.
Само собой, электроника активных дифференциалов, как и системы ABS, ESP и противобуксовки, тесно связаны с модулями управления двигателем и коробкой. Больше того, сегодня зачастую это единый «мозг», управляющий всем потоком мощности автомобиля.
КТО В ДОМЕ ХОЗЯИН?
Машина думает за меня. Хорошо ли это? Резонный вопрос. Да вроде хорошо, потому что быстродействие и безошибочность срабатывания систем дают сто очков вперед любому драйверу. К тому же автоматика никогда не устает, а малоопытный водитель получает помощника уровня лучших заводских испытателей.
Но и плохо, поскольку тонкости настроек электронных помощников напрямую зависят от того, насколько полноценно прототип автомобиля тестировали в условиях заводского полигона. И от того, как полно были внесены в полигонные установки поправки реальных испытаний на обычных дорогах. Важно, были ли учтены при прописывании таблиц значений тех или иных функций дорожные условия, общая манера вождения и прочий местный колорит конкретного региона, в который поступит нафаршированный суперсовременной электроникой автомобиль.
И от того, как полно были внесены в полигонные установки поправки реальных испытаний на обычных дорогах. Важно, были ли учтены при прописывании таблиц значений тех или иных функций дорожные условия, общая манера вождения и прочий местный колорит конкретного региона, в который поступит нафаршированный суперсовременной электроникой автомобиль.
Есть и еще один интересный момент: наибольшее количество претензий к работе продвинутой автоматики распределения тяги у наиболее опытных драйверов, требовательно относящихся к тому, как ведет себя автомобиль в предельных режимах.
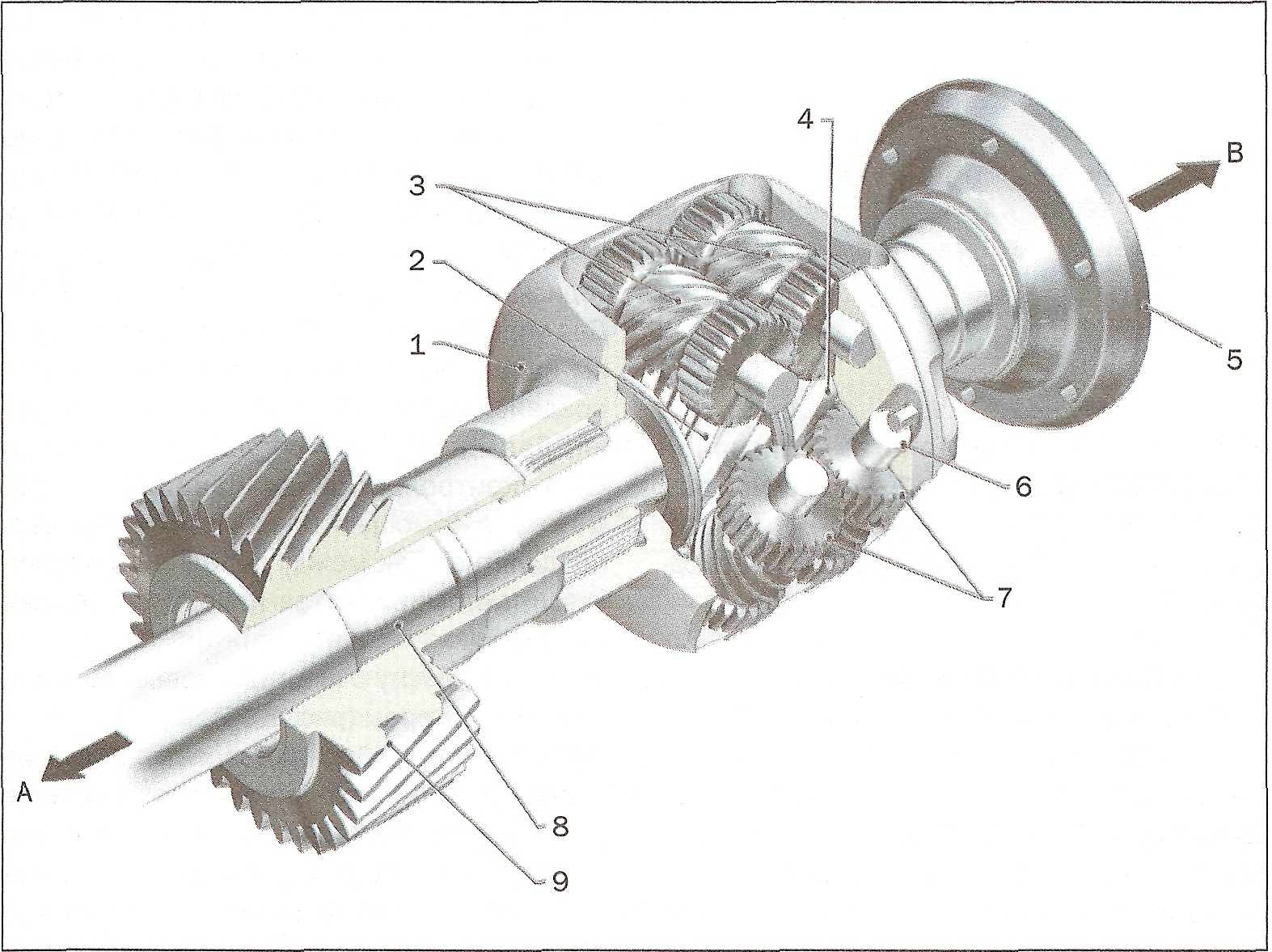
Свободный. Ядром активных систем все равно остается стандартный конический дифференциал – самая надежная и отработанная конструкция
Разумеется, любая, даже самая быстрая серийная модель получает на заводе некий усредненный алгоритм работы автоматики. Тем же, кто желает его скорректировать, остается идти путем, проложенным профессиональными спортсменами, – создавать собственную картину поведения автомобиля, настраивая его под себя. Сегодня это в основном удел редких автоманьяков. Но нет сомнений в том, что завтра подобные опции индивидуальной подстройки автоматических систем будут предлагать примерно так же, как сегодня мы создаем персональный интерфейс для смартфона.
Сегодня это в основном удел редких автоманьяков. Но нет сомнений в том, что завтра подобные опции индивидуальной подстройки автоматических систем будут предлагать примерно так же, как сегодня мы создаем персональный интерфейс для смартфона.ЧТО ЗА ГРАНЬЮ?
У продвинутой автоматики есть еще один аспект, который должен насторожить амбициозных, но не слишком опытных водителей. Прекрасно работающее содружество ESP, ABS, DPC и подобных порождает у водителя хорошо упакованной модели уверенность в собственном автомобиле на 120%. Примерно это же обещают и рекламные проспекты. И действительно: машины с продвинутой электроникой как по рельсам идут там, где не умудренные автоматикой предшественники виляли хвостом или не хотели поворачивать. Электроника позволяет удерживать колеса гораздо ближе к пределу сцепления с дорогой. Но, наслаждаясь доворотом задними колесами или отменной рулежкой на голом льду, помните, что тормозить в случае чего вам придется обыкновенными четырьмя колесами. И ни одна ABS не в силах изменить коэффициента сцепления резины с покрытием.
И ни одна ABS не в силах изменить коэффициента сцепления резины с покрытием.
Range Rover Overfinch решил побороться с Bentley Bentayga. По крайней мере, по цене
АвтомобилиГенерал песчаных карьеров. «Нива» Dune Crawler V8
АвтомобилиВживую новый Santa Fe выглядит немного иначе
НовостиHyundai Santa Fe 2024 выйдет с тремя рядами сидений и совершенно новым лицом
АвтомобилиMobil 1 выпустил видео с призывом освободиться от электричества
НовостиНа выход пикапа RAM Rampage, Chevrolet ответит спортивной «Монтаной»
АвтомобилиVolvo TP21. Ну и кто здесь самый брутальный?
НовостиСамый дешёвый и уродливый Defender
НовостиКритические места.
 На что нужно обратить внимание при покупке подержанного VW Tiguan
Автомобили
На что нужно обратить внимание при покупке подержанного VW Tiguan
Автомобили
Япония намерена ограничить экспорт подержанных автомобилей в РФ
НовостиBMW патентует активный дифференциал
BMW будет применять принципы традиционных автомобилей к своим электромобилям, что приведет к лучшей управляемости и увеличению запаса хода
На днях был обнаружен новый патент, который BMW подал во Всемирное ведомство интеллектуальной собственности, в котором подробно описывается конструкция дифференциала, которым могут быть оснащены будущие электромобили. Описание этой идеи простое: устройство для управления отдельным колесным приводом в электрифицированных двухосных транспортных средствах, в частности электромобилях с более чем одним приводным двигателем на ось, таких как четырехмоторный прототип электромобиля, используемый для разработки электрического M3.
BMW отмечает, что существующие электромобили с одним двигателем на каждом колесе способны точно распределять мощность на каждое колесо.
Это известно как векторизация крутящего момента, и векторизация электрического крутящего момента не является чем-то новым. Но электромобили с двумя электродвигателями на одной оси, как правило, в конечном итоге снижают запас хода, чтобы достичь своего мегапотенциала производительности, и BMW хочет решить эту загадку.
Вам не нужна вся мощность двух электродвигателей при любых условиях вождения, поэтому, чтобы обуздать эту большую неэффективность, BMW предлагает использовать скользящие муфты, магнитные муфты или кулачковые муфты для соединения и разъединения этих двигателей по мере необходимости, то есть только одной из них, две фактически приводили бы в движение ось.
BMW особо отмечает, что стремится найти «улучшение эффективности при низких нагрузках», но также указывает, что автомобили с электрическим приводом на задней оси будут в невыгодном положении из-за отключения типа Haldex (неполный полный привод), которое питает только переднюю часть оси до потери сцепления с дорогой. BMW говорит, что установка заднего привода «более благоприятна с точки зрения динамики движения», но что традиционные средства достижения целевых показателей эффективности отключают всю ось, обычно переднюю.
BMW говорит, что установка заднего привода «более благоприятна с точки зрения динамики движения», но что традиционные средства достижения целевых показателей эффективности отключают всю ось, обычно переднюю.
Это говорит нам о нескольких вещах. Во-первых, этот дифференциал для электрифицированного транспортного средства, вероятно, изначально будет применяться к полноприводному автомобилю, который приводит в движение обе оси, а во-вторых, полноприводный автомобиль с передним приводом (например, M235i Gran Coupe) может вести себя как с задним с приводом, очень похожим на систему M xDrive с задним смещением в таких автомобилях, как BMW M5. Кроме того, гибридный автомобиль может иметь полный привод без какой-либо физической связи между двигателем внутреннего сгорания спереди и электрифицированной задней осью, но при этом может действовать так, как если бы главной целью была максимальная эффективность.
Благодаря возможности задействовать только один двигатель на оси по мере необходимости (вместо того, чтобы оба двигателя были постоянно активны), электрифицированные биммеры будущего будут более эффективными и смогут пойти дальше, несмотря на то, что они одновременно будут предлагать выдающуюся динамику вождения благодаря еще более надежному распределению крутящего момента и возможности предлагать только RWD в качестве режима движения.
BMW предположила, что ее первые настоящие электромобили M смогут делать то, что не могут другие автомобили, но также заявила, что не будет навязывать электрическую мотивацию подразделению M, пока технология не будет достойна этого знаменитого значка.
Внедрив традиционный тип дифференциала в будущую электрическую трансмиссию, похоже, что BMW сдержит свое обещание сделать электрифицированные продукты M привлекательными и блестящими, сохраняя при этом максимальную энергоэффективность. Это, в сочетании с совершенно новой платформой и предстоящим появлением твердотельных батарей, должно сделать продукт привлекательным, независимо от того, являетесь ли вы энтузиастом или защитником окружающей среды.
Активное управление дифференциалом для улучшения управляемости переднеприводных автомобилей с высокими динамическими характеристиками
Активное управление дифференциалом для улучшения управляемости переднеприводных автомобилей с высокими динамическими характеристиками
Скачать PDF
Скачать PDF
- Опубликовано:
- Сынхун У 1,2 ,
- Хёнсу Ча 1 ,
- Кёнсу И 1 и
- … 9 0009 Соньюн Чан 2
Международный журнал автомобильных технологий том 22 , страницы 537–546 (2021)Процитировать эту статью
160 доступов
3 Цитаты
Детали показателей
Abstract
В этом документе представлена активная система управления дифференциалом для улучшения характеристик управляемости и ускорения. Обычные переднеприводные автомобили имеют определенные недостатки, в том числе недостаточное ускорение и чрезмерную недостаточную поворачиваемость при разгоне в повороте. Для решения этой проблемы мы предлагаем логику предотвращения недостаточной поворачиваемости. Во-первых, для быстрого реагирования крутящий момент заранее распределяется на внутренние и внешние колеса в соответствии с величиной предполагаемого тягового потенциала колес. Если происходит пробуксовка колеса, то дополнительный крутящий момент передается на внешнее колесо пропорционально приращению скорости внутреннего колеса по сравнению с внешним колесом. Однако передача крутящего момента на внешнее колесо ограничена пропорционально превышению скорости внешнего колеса по сравнению с неведущим колесом, чтобы предотвратить силовое скольжение. Логика предотвращения избыточной поворачиваемости может улучшить демпфирование рыскания. Алгоритм передает крутящий момент от внешнего колеса к внутреннему колесу пропорционально скорости рыскания, превышающей целевое значение.
Обычные переднеприводные автомобили имеют определенные недостатки, в том числе недостаточное ускорение и чрезмерную недостаточную поворачиваемость при разгоне в повороте. Для решения этой проблемы мы предлагаем логику предотвращения недостаточной поворачиваемости. Во-первых, для быстрого реагирования крутящий момент заранее распределяется на внутренние и внешние колеса в соответствии с величиной предполагаемого тягового потенциала колес. Если происходит пробуксовка колеса, то дополнительный крутящий момент передается на внешнее колесо пропорционально приращению скорости внутреннего колеса по сравнению с внешним колесом. Однако передача крутящего момента на внешнее колесо ограничена пропорционально превышению скорости внешнего колеса по сравнению с неведущим колесом, чтобы предотвратить силовое скольжение. Логика предотвращения избыточной поворачиваемости может улучшить демпфирование рыскания. Алгоритм передает крутящий момент от внешнего колеса к внутреннему колесу пропорционально скорости рыскания, превышающей целевое значение. Затем этот алгоритм был оценен с помощью испытаний транспортных средств. Электронный дифференциал повышенного трения с предложенным алгоритмом был запущен в серийное производство и получил положительные отзывы международных СМИ.
Затем этот алгоритм был оценен с помощью испытаний транспортных средств. Электронный дифференциал повышенного трения с предложенным алгоритмом был запущен в серийное производство и получил положительные отзывы международных СМИ.
Скачайте, чтобы прочитать полный текст статьи
Сокращения
- Т в :
крутящий момент на входе от коробки передач, Н·м
- Т Д ифф :
крутящий момент, передаваемый дифференциалом, Н·м
- Т Муфта :
крутящий момент, передаваемый сцеплением, Н·м
- Т Левый :
крутящий момент на выходе на левый карданный вал, Н·м
- Т Справа :
Выходной крутящий момент на правый карданный вал, Н·м
- Ф х_макс :
допустимая движущая сила шины, Н
- Ф г :
боковая сила шины, Н
- мкм :
коэффициент трения
- Ф из :
вертикальное усилие шины, Н
- и г :
боковое ускорение, м/с 2
- г :
ускорение свободного падения, м/с 2
- Ф привод :
движущая сила от силового агрегата, Н
- Т привод :
крутящий момент от силового агрегата, Н·м
- Р шина :
радиус шины, м
- Т ELSD_WSP :
Момент упреждающего контроля пробуксовки колес, Н·м
- Ф x_max_in :
Предел сцепления внутреннего колеса, N
- Ф x_max_out :
предел тяги внешнего колеса, N
- Т ELSD_WSF :
Момент управления обратной связью по частоте вращения колеса, Н·м
- ω в :
Угловая скорость внутреннего колеса
- ω из :
Угловая скорость внешнего колеса
- ω № :
Эталонная угловая скорость колеса (не ведущее)
- Т ELSD_YRF :
Управление крутящим моментом с обратной связью по скорости рыскания, Н·м 9\cdot _{Цель}}\) :
целевая скорость рыскания (оценщик), рад/с
- В:
скорость автомобиля, м/с
- Л:
Колесная база, м
- К США :
Градиент недостаточной поворачиваемости, рад/(м/с 2 )
- Δ:
Угол поворота (ходовое колесо), рад
- х ч :
характеристическая скорость, м/с
Ссылки
Ассадиан Ф.
 , Хэнкок М. и Бест М.С. (2008). Разработка алгоритма управления активным дифференциалом повышенного трения. Проц. 10-й междунар. Симп. Усовершенствованное управление транспортным средством (AVEC). Лафборо, Великобритания.
, Хэнкок М. и Бест М.С. (2008). Разработка алгоритма управления активным дифференциалом повышенного трения. Проц. 10-й междунар. Симп. Усовершенствованное управление транспортным средством (AVEC). Лафборо, Великобритания.Чен Ю., Хедрик Дж. К. и Го К. (2013). Новый контроллер прямого рыскающего момента для электромобилей с приводом от колеса. Динамика систем автомобиля 51 , 6 , 925–942.
Артикул Google Scholar
Фокс, М. и Грогг, Дж. (2012). Разработка переднеприводного ELSD для повышения эффективности и безопасности. Технический документ SAE № 2012-01-0305.
Гох, Дж. Ю. и Гердес, Дж. К. (2016). Одновременная стабилизация и отслеживание основных траекторий дрифта автомобиля. 2016 IEEE Intelligent Vehicles Symp. (IV). Готенбург, Швеция.
Хэнкок, М.Дж., Уильямс, Р.А., Фина, Э. и Бест, М.К. (2007). Управление рысканьем через активные дифференциалы.
Пер. Институт измерения и контроля 29 , 2 , 137–157.Артикул Google Scholar
Хейссинг Б. и Эрсой М. (ред.). (2010). Справочник по шасси: основы, динамика вождения, компоненты, мехатроника, перспективы. Springer Science & Business Media. Берлин, Германия.
Google Scholar
Hyundai Motor Company. (2020). e-LSD: Электрический дифференциал повышенного трения. Премия IR52 Чан Ён Шиля, 10 нед.
Джоа Э., Парк К., Кох Ю., Йи К. и Ким К. (2018). Интегрированное управление шасси на основе проскальзывания шин для распределения тяги между передними и задними колесами и независимый тормоз четырех колес от умеренного вождения до предельной управляемости. Динамика систем автомобиля 56 , 4 , 579–603.
Артикул Google Scholar
Джоа, Э.
, Ча, Х., Хён, Ю., Кох, Ю., И, К. и Пак, Дж. (2020). Новый подход к управлению автоматизированным дрифтингом с учетом характеристик вождения опытного водителя. Control Engineering Practice , 96 , 104293.Статья Google Scholar
Кинси, Дж. (2004). Преимущества самоблокирующегося дифференциала с электронным управлением. Технический документ SAE № 2004-01-0861.
Лутц А., Шик Б., Хольцманн Х., Кохем М., Мейер-Туве Х., Ланге О., Мао Ю. и Тосолин Г. (2017). Методы моделирования, поддерживающие омологацию электронного контроля устойчивости в вариантах транспортных средств. Динамика систем автомобиля 55 , 10 , 1432–1497.
Артикул Google Scholar
Мешади Б., Мостаани С. и Маджиди М. (2011). Повышение устойчивости автомобиля за счет использования активного дифференциала. Проц. Институт машиностроения, часть I: J.
Systems and Control Engineering 225 , 8 , 1098–1114.Google Scholar
Морселли Р., Занаси Р. и Сандони Г. (2006). Детализированные и уменьшенные динамические модели пассивных и активных самоблокирующихся дифференциалов автомобилей. Математическое и компьютерное моделирование динамических систем 12 , 4 , 347–362.
Артикул Google Scholar
Пиябонгкарн, Д., Грогг, Дж., Юань, К., Лью, Дж. и Раджамани, Р. (2006a). Динамическое моделирование устройств смещения крутящего момента для контроля рыскания автомобиля. Технический документ SAE № от 01.01.1963 г.
Пиябонгкарн Д., Лью Дж., Грогг Дж. и Кайл Р. (2006b). Улучшенная устойчивость при тяге и контроль рыскания с помощью электронного дифференциала повышенного трения. SAE Trans. , 931-941.
Пиябонгкарн, Д., Лью, Дж.
Ю., Раджамани, Р., Грогг, Дж. А. и Юань, К. (2007). Об использовании систем смещения крутящего момента для электронного контроля устойчивости: ограничения и возможности. IEEE Trans. Технология систем управления 15 , 3 , 581–589.Артикул Google Scholar
Пиябонгкарн, Д., Лью, Дж. Ю., Раджамани, Р. и Грогг, Дж. А. (2010). Активные системы управления крутящим моментом трансмиссии. Журнал IEEE Control Systems 30 , 4 , 86–102.
Артикул MathSciNet Google Scholar
Платто Р., Гвидони С., Саккеттини П. и Джессон Р. (1995). Сочетание дифференциала Torsen и электронной системы контроля тяги обеспечивает безопасность движения и управляемость. ИмечЭ , 1995, CA98/30/144.
Рубин, Д. и Арогети, С.А. (2015). Контроль устойчивости транспортного средства по рысканью с использованием активного дифференциала повышенного трения с помощью методов управления с прогнозированием модели.
Динамика систем автомобиля 53 , 9 , 1315–1330.Артикул Google Scholar
Сасаки Х., Найтоу Г., Это Ю., Окуда Дж., Кусукава Х. и Секигучи С. (1994). Разработка системы дифференциала повышенного трения с электронным управлением. Обзор JSAE 15 , 4 , 348–350.
Артикул Google Scholar
Шин, С. и Бауэрман, В. (2002). Оценка смещения крутящего момента и эффективности дифференциала Torsen. SAE Trans. , 1495-1505.
Сонг, П., Томизука, М. и Зонг, К. (2015). Новый интегрированный контроллер шасси для автомобилей с полным приводом. Динамика систем автомобиля 53 , 2 , 215–236.
Артикул Google Scholar
Веленис Э., Кацуракис Д., Фраззоли Э., Циотрас П. и Хаппи Р. (2011). Установившаяся стабилизация заноса заднеприводных автомобилей.
Инженерная практика управления 19 , 11 , 1363–1376.Артикул Google Scholar
Уэмацу, К. и Гердес, Дж. К. (2002). Сравнение нескольких поверхностей скольжения для контроля устойчивости. Проц. 6-й междунар. Симп. Усовершенствованное управление транспортным средством (AVEC). Хиросима, Япония.
Ву, С., Парк, С. и О, Ю. (2007). Решение проблемы управления крутящим моментом переднеприводного автомобиля с тяговитым двигателем на стадии разработки автомобиля. Технический документ SAE № 2007-01-3656.
Ву С., Юнг М. К., Сонг Дж. Х., Ян С. С. и Джанг С. Ю. (2019a). Способ управления электронным дифференциалом повышенного трения , KR:201
276.
Ву С., Юнг М. К., Сонг Дж. Х., Ян С. С. и Джанг С. Ю. (2019b) Метод управления электронным дифференциалом повышенного трения. Патент США 16/527,953.
 , Хэнкок М. и Бест М.С. (2008). Разработка алгоритма управления активным дифференциалом повышенного трения. Проц. 10-й междунар. Симп. Усовершенствованное управление транспортным средством (AVEC). Лафборо, Великобритания.
, Хэнкок М. и Бест М.С. (2008). Разработка алгоритма управления активным дифференциалом повышенного трения. Проц. 10-й междунар. Симп. Усовершенствованное управление транспортным средством (AVEC). Лафборо, Великобритания. Пер. Институт измерения и контроля 29 , 2 , 137–157.
Пер. Институт измерения и контроля 29 , 2 , 137–157. , Ча, Х., Хён, Ю., Кох, Ю., И, К. и Пак, Дж. (2020). Новый подход к управлению автоматизированным дрифтингом с учетом характеристик вождения опытного водителя. Control Engineering Practice , 96 , 104293.
, Ча, Х., Хён, Ю., Кох, Ю., И, К. и Пак, Дж. (2020). Новый подход к управлению автоматизированным дрифтингом с учетом характеристик вождения опытного водителя. Control Engineering Practice , 96 , 104293. Systems and Control Engineering 225 , 8 , 1098–1114.
Systems and Control Engineering 225 , 8 , 1098–1114. Ю., Раджамани, Р., Грогг, Дж. А. и Юань, К. (2007). Об использовании систем смещения крутящего момента для электронного контроля устойчивости: ограничения и возможности. IEEE Trans. Технология систем управления 15 , 3 , 581–589.
Ю., Раджамани, Р., Грогг, Дж. А. и Юань, К. (2007). Об использовании систем смещения крутящего момента для электронного контроля устойчивости: ограничения и возможности. IEEE Trans. Технология систем управления 15 , 3 , 581–589.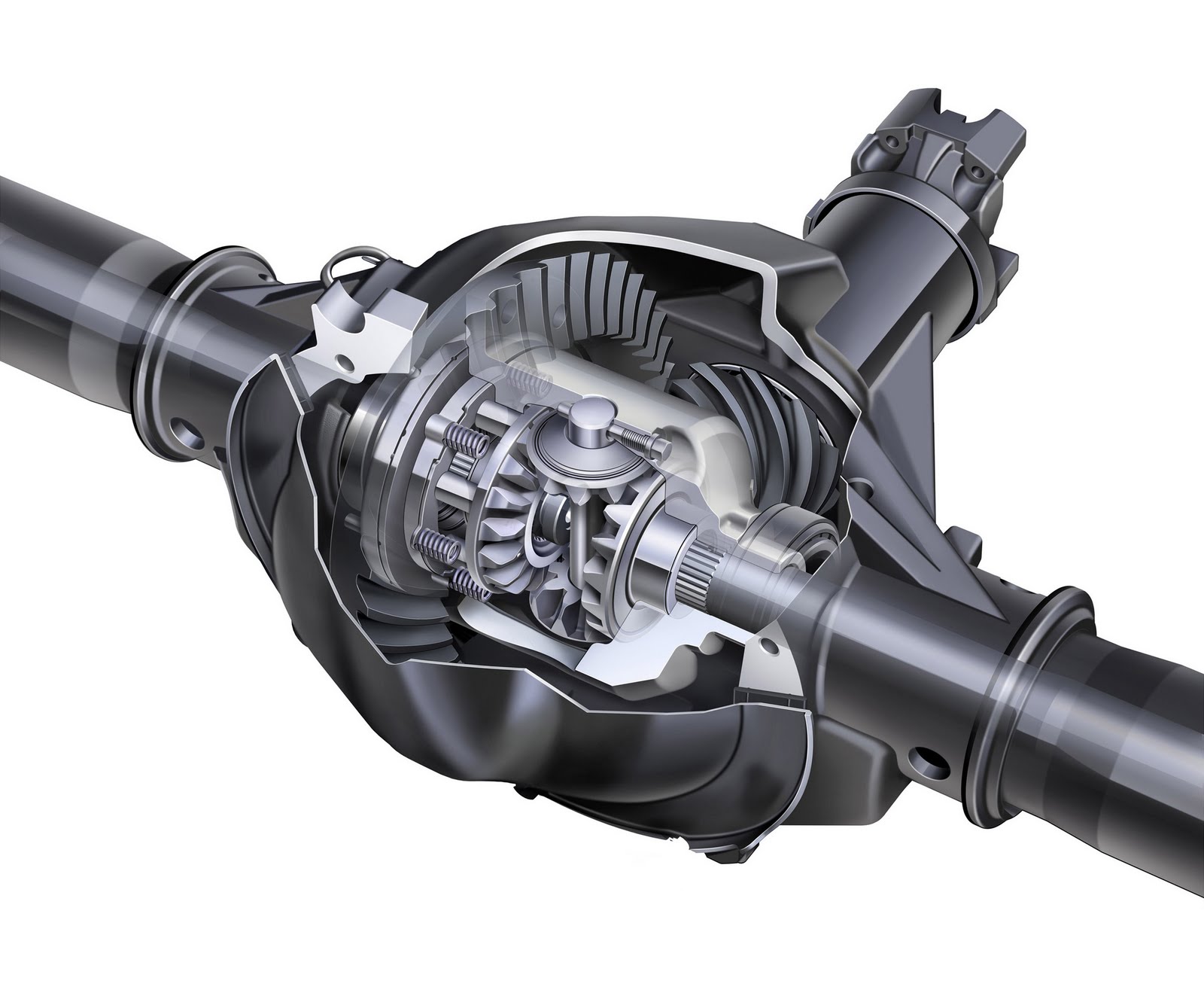 Динамика систем автомобиля 53 , 9 , 1315–1330.
Динамика систем автомобиля 53 , 9 , 1315–1330. Инженерная практика управления 19 , 11 , 1363–1376.
Инженерная практика управления 19 , 11 , 1363–1376.Скачать ссылки
Подтверждение
Это исследование было поддержано (частично) SNU-IAMD.
Информация об авторе
Авторы и организации
Школа машиностроения, Сеульский национальный университет, Сеул, 08826, Корея
Seunghoon Woo, Hyunsoo Cha и Kyongsu Yi
Отдел исследований и разработок, Hyundai Motor Company, 150 Hyundaiyeonguso-ro, Namyang-eup, Hwaseong-si, 18280, Корея
Seunghoon Woo и Seongyun Jang
- Seunghoon Woo
Посмотреть публикации автора
Вы также можете искать этого автора в PubMed Google Scholar
- Hyunsoo Cha
Просмотр публикаций автора
Вы также можете искать этого автора в PubMed Google Scholar
- Kyongsu Yi
Просмотр публикаций автора
Вы также можете искать этого автора в PubMed Google Scholar
- Seongyun Jang
Посмотреть публикации автора
Вы также можете искать этого автора в PubMed Google Scholar
Автор, ответственный за переписку
Кёнсу И.
Дополнительная информация
Примечание издателя Springer Nature остается нейтральной в отношении юрисдикционных претензий в опубликованных картах и институциональной принадлежности.
Права и разрешения
Перепечатка и разрешения
Об этой статье
Детальный дифференциал Active M
//Технология M5
by MichaelВо время нашего пребывания с M5 в Испании мы были удивлены новым дифференциалом, который называется активным дифференциалом M (в этом нет ничего удивительного). Он был тихим, хорошо играл и безупречно переносил мощность с колеса с проскальзыванием на колесо с сцеплением.
Согласно полученной нами информации, он имеет ограниченные паразитные потери и является лишь одним из многих компонентов, которые помогают новому M5 достигать выдающихся характеристик при одновременном повышении эффективности.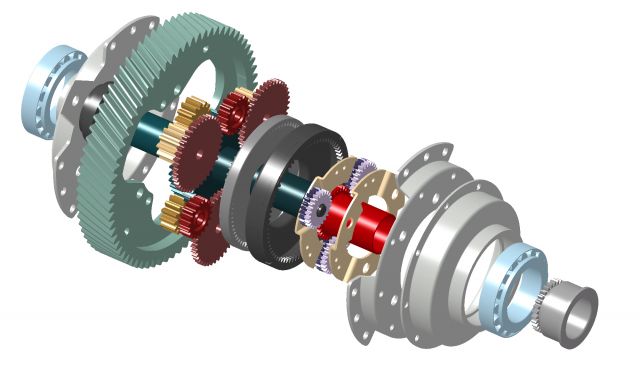 Мы разобрали сложности, как смогли. Это удивительная аппаратная часть.
Мы разобрали сложности, как смогли. Это удивительная аппаратная часть.
Активный дифференциал M — это следующий шаг в обеспечении большей управляемости и устойчивости заднеприводного шасси. Вместо того, чтобы требовать проскальзывания, как вязкостной дифференциал, новая система может быть упреждающей благодаря использованию электроники. Он интерпретирует данные системы динамического контроля устойчивости, чтобы обеспечить оптимальное усилие блокировки для каждого колеса до того, как одно из них вырвется на свободу.
В дополнение к использованию системы DSC активный дифференциал M может адаптироваться в зависимости от положения педали, скорости вращения колес и скорости рыскания. Все это происходит чрезвычайно быстро и точно. Этот дифференциал способен передавать мощность на внешнее колесо в крутом повороте, а также противодействовать потере сцепления при смене полосы движения на высокой скорости. Это может даже уменьшить склонность к недостаточной поворачиваемости при прохождении поворотов с полной нагрузкой.
 Так же, как и вокруг фар предлагают заклеить скотчем, чтобы не испортить краску на окантовке кузова.
Так же, как и вокруг фар предлагают заклеить скотчем, чтобы не испортить краску на окантовке кузова. Можете ли вы или кто-нибудь еще порекомендовать какие-либо составы, которые не разрушат покрытие поверх остального покрытия, или есть правило о продвижении товаров на форуме? Я полагаю, основываясь на вашем предположении, что автомобильный воск не ухудшит работу фар? Я никогда не использовал его на фаре.
Можете ли вы или кто-нибудь еще порекомендовать какие-либо составы, которые не разрушат покрытие поверх остального покрытия, или есть правило о продвижении товаров на форуме? Я полагаю, основываясь на вашем предположении, что автомобильный воск не ухудшит работу фар? Я никогда не использовал его на фаре.
 Я могу отправить обратно на основе моих экзаменов по вождению.
Я могу отправить обратно на основе моих экзаменов по вождению. Комплект Diamondite Restore & Protect Headlight за считанные минуты химически удаляет окислившийся материал, используя неопасную формулу, не содержащую растворителей, а затем восстанавливает оптическую прозрачность. Наконец, комплект Diamondite Restore & Protect Headlight обеспечивает прочное, долговечное и глянцевое покрытие, которое защищает от воды и других опасностей.
Комплект Diamondite Restore & Protect Headlight за считанные минуты химически удаляет окислившийся материал, используя неопасную формулу, не содержащую растворителей, а затем восстанавливает оптическую прозрачность. Наконец, комплект Diamondite Restore & Protect Headlight обеспечивает прочное, долговечное и глянцевое покрытие, которое защищает от воды и других опасностей. Это очищает фары, улучшает их внешний вид и позволяет сделать следующий шаг для улучшения оптической четкости. Чтобы использовать средство для удаления окисления с фар Diamondite, круговыми движениями равномерно протрите пропитанную салфетку вокруг фары. Когда вы видите янтарно-коричневое обесцвечивание, это показывает, что средство работает. Повторяйте столько раз, сколько необходимо.
Это очищает фары, улучшает их внешний вид и позволяет сделать следующий шаг для улучшения оптической четкости. Чтобы использовать средство для удаления окисления с фар Diamondite, круговыми движениями равномерно протрите пропитанную салфетку вокруг фары. Когда вы видите янтарно-коричневое обесцвечивание, это показывает, что средство работает. Повторяйте столько раз, сколько необходимо. Не вытирайте излишки продукта и дайте покрытиям полностью высохнуть в течение часа, стараясь не подвергать их воздействию влаги. Используйте только одну салфетку для каждой фары и протрите ее, если алмазное керамическое прозрачное покрытие для фар попало на лакокрасочное покрытие.
Не вытирайте излишки продукта и дайте покрытиям полностью высохнуть в течение часа, стараясь не подвергать их воздействию влаги. Используйте только одну салфетку для каждой фары и протрите ее, если алмазное керамическое прозрачное покрытие для фар попало на лакокрасочное покрытие.
 В случае необходимости вы можете обратиться за сменой категории годности военкомата.
В случае необходимости вы можете обратиться за сменой категории годности военкомата. Эта категория может быть присвоена по различным причинам, таким как заболевания, ограниченные возможности здоровья и т.д.
Эта категория может быть присвоена по различным причинам, таким как заболевания, ограниченные возможности здоровья и т.д.
 На комиссии врачи определят состояние вашего здоровья, а затем присвоят категорию годности. Если у вас имеются заболевания или последствия травм, то вы можете получить категорию годности «Д».
На комиссии врачи определят состояние вашего здоровья, а затем присвоят категорию годности. Если у вас имеются заболевания или последствия травм, то вы можете получить категорию годности «Д». В этом случае, следует получить консультацию специалистов-юристов для решения возможных проблем и вопросов.
В этом случае, следует получить консультацию специалистов-юристов для решения возможных проблем и вопросов.

 Для этого вам нужно получить консультацию у медицинского специалиста в военном комиссариате. Он расскажет вам о том, по какому алгоритму происходит присвоение категории годности, что она значит и какие могут быть последствия.
Для этого вам нужно получить консультацию у медицинского специалиста в военном комиссариате. Он расскажет вам о том, по какому алгоритму происходит присвоение категории годности, что она значит и какие могут быть последствия. Если данная категория указана в военном билете, то человек не может быть призван на военную службу.
Если данная категория указана в военном билете, то человек не может быть призван на военную службу. Если по каким-то причинам категория «Д» была неправомерно присвоена, можно обратиться к юристу за помощью.
Если по каким-то причинам категория «Д» была неправомерно присвоена, можно обратиться к юристу за помощью. Для этого необходимо провести соответствующее медицинское обследование и, при наличии соответствующих показаний, получить новую категорию годности.
Для этого необходимо провести соответствующее медицинское обследование и, при наличии соответствующих показаний, получить новую категорию годности. Это может быть вызвано различными заболеваниями или условиями здоровья, которые могут ограничивать возможность прохождения службы в армии.
Это может быть вызвано различными заболеваниями или условиями здоровья, которые могут ограничивать возможность прохождения службы в армии. Визит в мед. центр с паспортом и прохождение врачей
2. Посещение диспансеров (психиатр и нарколог)
3. Повторный визит в медцентр и получение водительской справки
Визит в мед. центр с паспортом и прохождение врачей
2. Посещение диспансеров (психиатр и нарколог)
3. Повторный визит в медцентр и получение водительской справки Чтобы данный документ был получен, потребуется прохождение водительской медкомиссии.
Чтобы данный документ был получен, потребуется прохождение водительской медкомиссии.
 Получение заключений от офтальмолога, отоларинголога и невролога возможно, как на базе государственного медицинского учреждения, так и на базе частного, располагающего государственной лицензией на оказание данных медицинских услуг.
Получение заключений от офтальмолога, отоларинголога и невролога возможно, как на базе государственного медицинского учреждения, так и на базе частного, располагающего государственной лицензией на оказание данных медицинских услуг.
 Обновлено в августе 2019 г. Лекарства следует принимать только в том случае, если ожидаемая польза для матери превышает риск для матери и ребенка. Основные лекарства следует принимать в минимально возможной дозе и в течение как можно более короткого периода времени во время беременности. Риск пороков развития плода наиболее высок в течение первого триместра (первые 12 недель беременности). Следует тщательно оценить влияние отмены на новорожденного, если такие лекарства, как антидепрессанты, принимаются в течение третьего триместра (после 28 недель).
Обновлено в августе 2019 г. Лекарства следует принимать только в том случае, если ожидаемая польза для матери превышает риск для матери и ребенка. Основные лекарства следует принимать в минимально возможной дозе и в течение как можно более короткого периода времени во время беременности. Риск пороков развития плода наиболее высок в течение первого триместра (первые 12 недель беременности). Следует тщательно оценить влияние отмены на новорожденного, если такие лекарства, как антидепрессанты, принимаются в течение третьего триместра (после 28 недель).

 е. эти лекарства обладают тератогенным действием).
е. эти лекарства обладают тератогенным действием). youtube.com/embed/x3EMcXEFSUA?playlist=x3EMcXEFSUA&rel=0&showinfo=0&autoplay=&loop=» frameborder=»0″ allow=»encrypted-media» allowfullscreen=»»>
youtube.com/embed/x3EMcXEFSUA?playlist=x3EMcXEFSUA&rel=0&showinfo=0&autoplay=&loop=» frameborder=»0″ allow=»encrypted-media» allowfullscreen=»»>  Например, получение кредита в финансовом учреждении, каков ваш бюджет, стоимость страхования, эксплуатационные расходы автомобиля, как долго вы будете владеть автомобилем с учетом амортизации и многих других факторов.
Например, получение кредита в финансовом учреждении, каков ваш бюджет, стоимость страхования, эксплуатационные расходы автомобиля, как долго вы будете владеть автомобилем с учетом амортизации и многих других факторов. 

 Любой, кто покупает финансовое списание, должен тщательно проверить его, чтобы убедиться, что физическая целостность транспортного средства не была нарушена в результате его реконструкции, и механически проверить, чтобы убедиться, что он полностью соответствует требованиям, установленным законодательством о дорожном движении для использования. транспортных средств на дорогах общего пользования.
Любой, кто покупает финансовое списание, должен тщательно проверить его, чтобы убедиться, что физическая целостность транспортного средства не была нарушена в результате его реконструкции, и механически проверить, чтобы убедиться, что он полностью соответствует требованиям, установленным законодательством о дорожном движении для использования. транспортных средств на дорогах общего пользования.  Это означает, что у него не может быть никаких дальнейших изменений владельца, поэтому его нельзя использовать, и фактически его нельзя законно продать для использования на дороге.
Это означает, что у него не может быть никаких дальнейших изменений владельца, поэтому его нельзя использовать, и фактически его нельзя законно продать для использования на дороге.
 Обычно каждая страна имеет свою собственную валюту, и если, например, вы покупаете товар в другой валюте или путешествуете в страну с валютой, отличной от вашей, это потребует обмена валют, при котором вы продаете свою валюту и покупаете другую (за это обычно взимается комиссия за конвертацию) через финансовое учреждение.
Обычно каждая страна имеет свою собственную валюту, и если, например, вы покупаете товар в другой валюте или путешествуете в страну с валютой, отличной от вашей, это потребует обмена валют, при котором вы продаете свою валюту и покупаете другую (за это обычно взимается комиссия за конвертацию) через финансовое учреждение.



 США
США org/Question»>
org/Question»>
 TransferWise, с другой стороны, до 5 раз дешевле. Узнать больше
TransferWise, с другой стороны, до 5 раз дешевле. Узнать больше Инструмент калькулятора для конвертации между любыми двумя валютами. Curvert — конвертер валют и криптовалют.
Инструмент калькулятора для конвертации между любыми двумя валютами. Curvert — конвертер валют и криптовалют. США
США 75544
75544 000365 Евро в Litecoin
000365 Евро в Litecoin Он обновляется ежечасно.
Он обновляется ежечасно.
 Комплект 2 шт.
Комплект 2 шт. Так все будет работать коректно.
Так все будет работать коректно. + 50 кг — IRONMAN 4X4
+ 50 кг — IRONMAN 4X4 Размер 2 метра х 2.5 метра — T4
Размер 2 метра х 2.5 метра — T4 kz — продажа усиленной подвески и аксессуаров для внедорожников и пикапов
kz — продажа усиленной подвески и аксессуаров для внедорожников и пикапов
 Каждый владелец внедорожника найдёт для себя нужные детали и аксессуары для туризма.
Каждый владелец внедорожника найдёт для себя нужные детали и аксессуары для туризма.
 За 18 лет были укомплектованы тысячи внедорожников для тяжёлого бездорожья, сегодня нам доверяет множество людей, предпочитающих кочки, ухабы и броды плоской серой дороге:
За 18 лет были укомплектованы тысячи внедорожников для тяжёлого бездорожья, сегодня нам доверяет множество людей, предпочитающих кочки, ухабы и броды плоской серой дороге:
 Просмотрите список ниже или позвоните по номеру (888) 423-3191 , чтобы поговорить со специалистом по освещению. Мы сделаем все возможное, чтобы помочь вам найти правильное решение.
Просмотрите список ниже или позвоните по номеру (888) 423-3191 , чтобы поговорить со специалистом по освещению. Мы сделаем все возможное, чтобы помочь вам найти правильное решение. Он включает в себя наши светодиодные фонари для поля для софтбола, разработанные в плане, чтобы мы могли видеть, насколько хорошо освещено поле. Это позволяет нам легко регулировать освещение и менять местами источники света, чтобы получить наилучшие результаты для вашего проекта освещения для софтбола.
Он включает в себя наши светодиодные фонари для поля для софтбола, разработанные в плане, чтобы мы могли видеть, насколько хорошо освещено поле. Это позволяет нам легко регулировать освещение и менять местами источники света, чтобы получить наилучшие результаты для вашего проекта освещения для софтбола. Уровень стоимости отражает эту расширенную функциональность.
Уровень стоимости отражает эту расширенную функциональность. Для полей для софтбола трудно придумать причину, по которой необходимо сохранить существующие приспособления. Мы рекомендуем новые светильники для замены существующих металлогалогенных ламп для игрового поля для софтбола и алмазов для софтбола.
Для полей для софтбола трудно придумать причину, по которой необходимо сохранить существующие приспособления. Мы рекомендуем новые светильники для замены существующих металлогалогенных ламп для игрового поля для софтбола и алмазов для софтбола. Ваша местная коммунальная служба отвечает за то, дадут ли они вам скидку или нет. Лучше сначала уточнить у них.
Ваша местная коммунальная служба отвечает за то, дадут ли они вам скидку или нет. Лучше сначала уточнить у них. Кроме того, они потребляют меньше энергии, чем галогениды металлов. Так меньше потребляемый ток.
Кроме того, они потребляют меньше энергии, чем галогениды металлов. Так меньше потребляемый ток. Светодиодный свет излучает качественный свет, который обеспечивает безопасность игроков и зрителей и гарантирует, что каждый может видеть действия. Правильное освещение имеет важное значение для полного удовольствия от спортивного мероприятия.
Светодиодный свет излучает качественный свет, который обеспечивает безопасность игроков и зрителей и гарантирует, что каждый может видеть действия. Правильное освещение имеет важное значение для полного удовольствия от спортивного мероприятия. Их также можно использовать в коммерческих целях, таких как автостоянки, логистические порты или дороги, а также в промышленных целях, таких как заводы или производственные предприятия, строительные площадки и нефтяные месторождения. Светодиодные светильники для стадионов серии Konlite KVG можно безопасно использовать в агрессивных средах, в том числе на набережной и в морских портах.
Их также можно использовать в коммерческих целях, таких как автостоянки, логистические порты или дороги, а также в промышленных целях, таких как заводы или производственные предприятия, строительные площадки и нефтяные месторождения. Светодиодные светильники для стадионов серии Konlite KVG можно безопасно использовать в агрессивных средах, в том числе на набережной и в морских портах.
 После чего проделать такую же манипуляцию, как и с козырьками, то есть сделать выкройку. Здесь может возникнуть небольшая трудность — прикрепление «обновленной» вставки к плите.
После чего проделать такую же манипуляцию, как и с козырьками, то есть сделать выкройку. Здесь может возникнуть небольшая трудность — прикрепление «обновленной» вставки к плите.

 Выбирать новую «баранку» следует из вариантов от модели 2115, как наиболее удобных и хватких. В плане замены рулевого колеса тюнинг салона ВАЗ 2114 своими руками пошагово можно представить следующим образом:
Выбирать новую «баранку» следует из вариантов от модели 2115, как наиболее удобных и хватких. В плане замены рулевого колеса тюнинг салона ВАЗ 2114 своими руками пошагово можно представить следующим образом: Основными системами, подверженными тюнингу, являются двигатель и ходовая часть.
Основными системами, подверженными тюнингу, являются двигатель и ходовая часть. Это снизит время эксплуатации автомобиля, но может привести к его быстрой поломке.
Это снизит время эксплуатации автомобиля, но может привести к его быстрой поломке. Нередко встречаются ситуации, когда багажник должен быть открыт при работающем моторе. Например, когда двигатель прогревается и, чтобы не терять времени, водитель решает загрузить вещи в машину. Дистанционное управление крышкой давно получило распространение, и сегодня такой тюнинг 2114 своими руками можно осуществить тремя способами:
Нередко встречаются ситуации, когда багажник должен быть открыт при работающем моторе. Например, когда двигатель прогревается и, чтобы не терять времени, водитель решает загрузить вещи в машину. Дистанционное управление крышкой давно получило распространение, и сегодня такой тюнинг 2114 своими руками можно осуществить тремя способами: Многие достаточно хорошо отзываются о выносливой подвеске и бойких моторах данного семейства. Однако, качество сборки зачастую вызывает разочарование.
Многие достаточно хорошо отзываются о выносливой подвеске и бойких моторах данного семейства. Однако, качество сборки зачастую вызывает разочарование. Соединение этих компонентов обеспечивается посредством специальных трубок, которые заполняются жидкостью с пониженным уровнем температуры замерзания. Собственно, отсюда и название корректоров с приставкой гидро. Но перед установкой важно учитывать, что вышедший из строя гидрокорректор в результате клина поршней или утечки специальной жидкости восстановлению не подлежит.
Соединение этих компонентов обеспечивается посредством специальных трубок, которые заполняются жидкостью с пониженным уровнем температуры замерзания. Собственно, отсюда и название корректоров с приставкой гидро. Но перед установкой важно учитывать, что вышедший из строя гидрокорректор в результате клина поршней или утечки специальной жидкости восстановлению не подлежит.
 Тюнинг салона за счет магнитолы также предусматривает первичный анализ возможностей машины на предмет установки звуковой системы. Для этого «Самара 2» обеспечена специальными нишами, позволяющими использовать как традиционные заводские модели, так и современные магнитолы, работающие с внешними звуковыми устройствами. Наборы для подключения содержат в составе крепежные элементы, провода и дополнительную гарнитуру, поэтому установка выполняется без проблем за 30-40 минут.
Тюнинг салона за счет магнитолы также предусматривает первичный анализ возможностей машины на предмет установки звуковой системы. Для этого «Самара 2» обеспечена специальными нишами, позволяющими использовать как традиционные заводские модели, так и современные магнитолы, работающие с внешними звуковыми устройствами. Наборы для подключения содержат в составе крепежные элементы, провода и дополнительную гарнитуру, поэтому установка выполняется без проблем за 30-40 минут. Некоторой привлекательности добавляют молдинги на дверях, обвес, а также спойлер с дополнительным стоп-сигналом.
Некоторой привлекательности добавляют молдинги на дверях, обвес, а также спойлер с дополнительным стоп-сигналом. К недостаткам такого решения относится то, что провод находится на виду. Поэтому с точки зрения эстетической целесообразности такой для ВАЗ 2114 тюнинг салона подходит далеко не во всех случаях. Впрочем, всегда можно найти способ маскировки выступающих проводов.
К недостаткам такого решения относится то, что провод находится на виду. Поэтому с точки зрения эстетической целесообразности такой для ВАЗ 2114 тюнинг салона подходит далеко не во всех случаях. Впрочем, всегда можно найти способ маскировки выступающих проводов. В качестве замены подсвечивающего напыления следует использовать основу из светодиодов. Для этого можно взять пластмассовую заготовку и вырезать из нее панель, подходящую по размерам к углублению головной части приборного блока. Деталь легко фиксируется, подсвечивая все информационные зоны.
В качестве замены подсвечивающего напыления следует использовать основу из светодиодов. Для этого можно взять пластмассовую заготовку и вырезать из нее панель, подходящую по размерам к углублению головной части приборного блока. Деталь легко фиксируется, подсвечивая все информационные зоны.
 Часто его используют для спортивных и гоночных автомобилей, но в наших странах любой автомобиль мог стать тюнингованным.
Часто его используют для спортивных и гоночных автомобилей, но в наших странах любой автомобиль мог стать тюнингованным.
 Многие автолюбители меняют клиренс за счет коротких или длинных амортизаторов, а также разного рода дисков. Также характерной особенностью является установка модифицированной выхлопной трубы, которая изменяет звук мотора.
Многие автолюбители меняют клиренс за счет коротких или длинных амортизаторов, а также разного рода дисков. Также характерной особенностью является установка модифицированной выхлопной трубы, которая изменяет звук мотора.
 Доверьте переделку автомобиля специалистам, которые сделают все быстро и качественно.
Доверьте переделку автомобиля специалистам, которые сделают все быстро и качественно.

 , или
, или 
 д.
д. серия
серия 3 л
3 л 2 л (94-96)
2 л (94-96)

 Есть отдельные версии, где индекс переносят на другое место.
Есть отдельные версии, где индекс переносят на другое место. Панелька расположена в месте, которое сильно подвержено загрязнению и образованию шламов.
Панелька расположена в месте, которое сильно подвержено загрязнению и образованию шламов. На ДВС в стоке монтировался инжектор, карбюраторные версии были, но поставлялись на рынок в минимальном количестве.
На ДВС в стоке монтировался инжектор, карбюраторные версии были, но поставлялись на рынок в минимальном количестве.
 ..
..

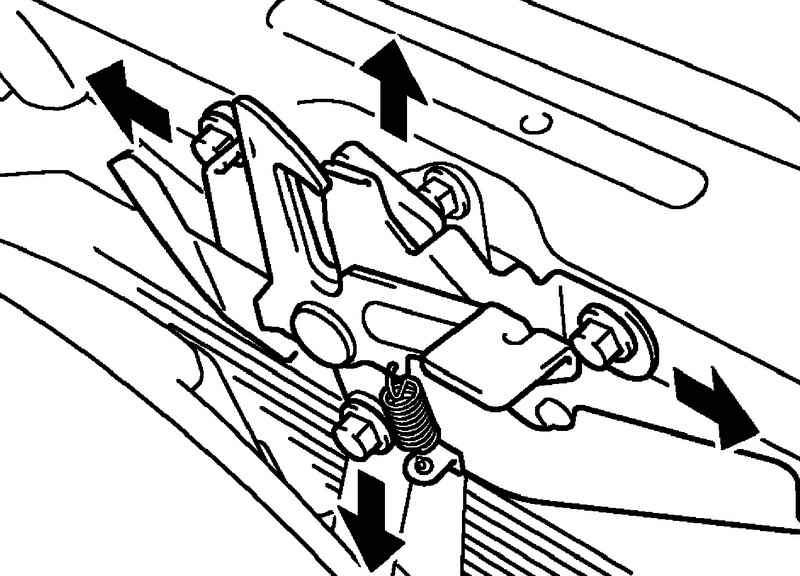
 Ослабьте болты (стрелки) крепления
замка капота (5).
Ослабьте болты (стрелки) крепления
замка капота (5).

 Если имеются шайбы, то их необходимо надеть на свои же болты — так вы избежите путаницы при обратной установке.
Если имеются шайбы, то их необходимо надеть на свои же болты — так вы избежите путаницы при обратной установке.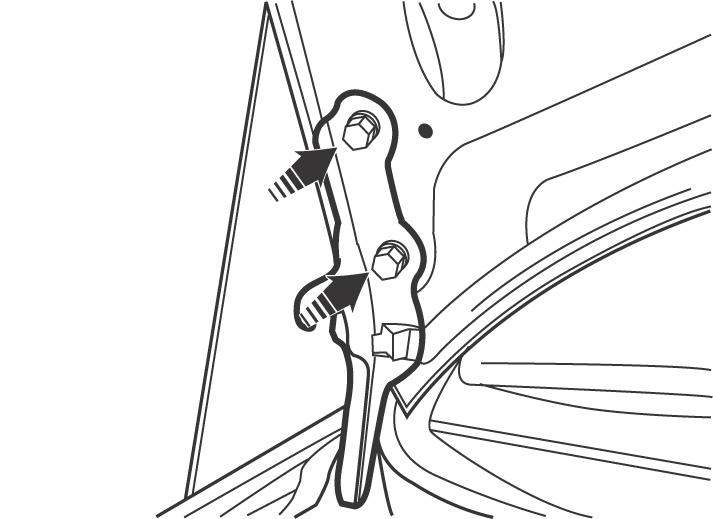 Сами планки при этом жестко закреплены к стенке, но если ослабить крепежные элементы, то у вас появится возможность двигать планки. Именно так осуществляется регулировка капота. Выполняется данная процедура в следующем порядке:
Сами планки при этом жестко закреплены к стенке, но если ослабить крепежные элементы, то у вас появится возможность двигать планки. Именно так осуществляется регулировка капота. Выполняется данная процедура в следующем порядке: В этом случае вам нужно найти пластину защелки замка, слегка ослабить болтовые крепления, после чего сместить защелку в нужном направлении. Далее необходимо затянуть болты, закрыть капот и проверить его положение. Если он также ложится неплотно, то нужно повторить процедуру еще раз.
В этом случае вам нужно найти пластину защелки замка, слегка ослабить болтовые крепления, после чего сместить защелку в нужном направлении. Далее необходимо затянуть болты, закрыть капот и проверить его положение. Если он также ложится неплотно, то нужно повторить процедуру еще раз. youtube.com/embed/LYBcTK6I0XI» allowfullscreen=»allowfullscreen»>
youtube.com/embed/LYBcTK6I0XI» allowfullscreen=»allowfullscreen»>  . Откройте капот и с помощью храповика и гнезда ослабьте болты на скобе, которая крепит капот к автомобилю
. Откройте капот и с помощью храповика и гнезда ослабьте болты на скобе, которая крепит капот к автомобилю – Замена и установка нового капота на вашем автомобиле непросты из-за неудобного размера и формы капота.
– Замена и установка нового капота на вашем автомобиле непросты из-за неудобного размера и формы капота. . После закрытия капота я вижу, что с левой стороны есть гораздо больший зазор, чем с правой стороны, между краем капота и боковая панель
. После закрытия капота я вижу, что с левой стороны есть гораздо больший зазор, чем с правой стороны, между краем капота и боковая панель Это классический автомобиль с долгой историей и большим характером.
Это классический автомобиль с долгой историей и большим характером. Возьмите острие и отметьте все вокруг петель, где они крепятся к раме автомобиля (отметка на раме)
Возьмите острие и отметьте все вокруг петель, где они крепятся к раме автомобиля (отметка на раме) Как мне отрегулировать его или я должен отнести его дилеру, чтобы он починил? У кого-то еще есть такая проблема?
Как мне отрегулировать его или я должен отнести его дилеру, чтобы он починил? У кого-то еще есть такая проблема? Во-первых, проверьте, не связана ли проблема с защелкой или тросом разблокировки.
Во-первых, проверьте, не связана ли проблема с защелкой или тросом разблокировки.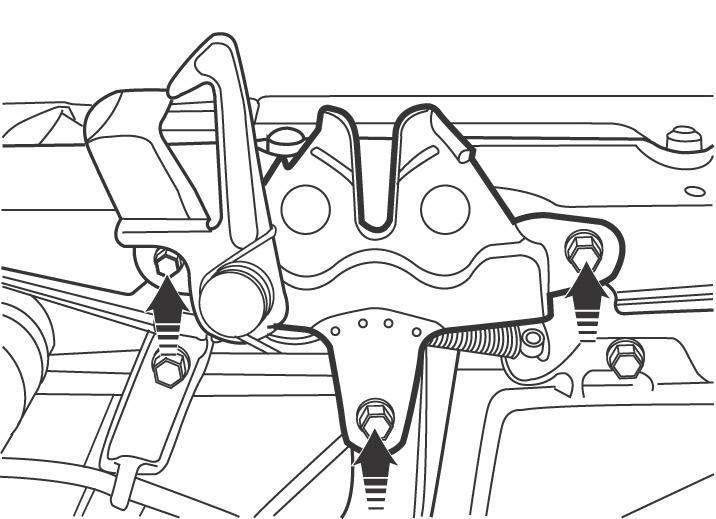 .. Я обратил на него внимание, что он казался выключенным, они сказали что-то о защелке, но она закрылась и заблокировалась нормально. Затем я погуглил и наткнулся на этот пост и конечно же, я вижу это повреждение прямо в середине того стержня, к которому соединяется защелка с 3 болтами.
.. Я обратил на него внимание, что он казался выключенным, они сказали что-то о защелке, но она закрылась и заблокировалась нормально. Затем я погуглил и наткнулся на этот пост и конечно же, я вижу это повреждение прямо в середине того стержня, к которому соединяется защелка с 3 болтами. можно промучиться целый день и прийти к окончательному выводу, что машину тоже когда-то ударили, это само по себе PITA.
можно промучиться целый день и прийти к окончательному выводу, что машину тоже когда-то ударили, это само по себе PITA. Мы убедились в этом на собственном опыте, когда собирали пикап Chevy 1953 года выпуска
Мы убедились в этом на собственном опыте, когда собирали пикап Chevy 1953 года выпуска com/article/car-maintenance/how-to-adjust-hood-height-the-comprehensive-guide /
com/article/car-maintenance/how-to-adjust-hood-height-the-comprehensive-guide / nicoclub.com/how-to- Adjust-the-hood-t394491.html
nicoclub.com/how-to- Adjust-the-hood-t394491.html Крышка оставалась прикрепленной к тележке с помощью 16-дюймовых магнитов. Это от Harbour Freight. Будь осторожен. Они сильные.
Крышка оставалась прикрепленной к тележке с помощью 16-дюймовых магнитов. Это от Harbour Freight. Будь осторожен. Они сильные.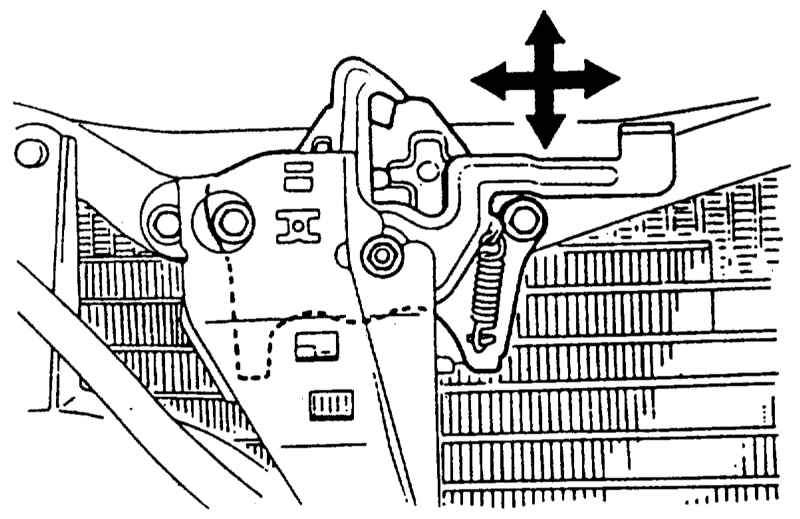 Чтобы добиться рекомендованного заводом зазора в 3/16, который позже может съесть краску, нам также пришлось добавить прокладки на нижние болты крепления шарнира к капоту.
Чтобы добиться рекомендованного заводом зазора в 3/16, который позже может съесть краску, нам также пришлось добавить прокладки на нижние болты крепления шарнира к капоту. Поскольку у нас будет только один шанс сделать это правильно в первый раз, наш новый инструмент также нуждается в небольшой настройке.
Поскольку у нас будет только один шанс сделать это правильно в первый раз, наш новый инструмент также нуждается в небольшой настройке.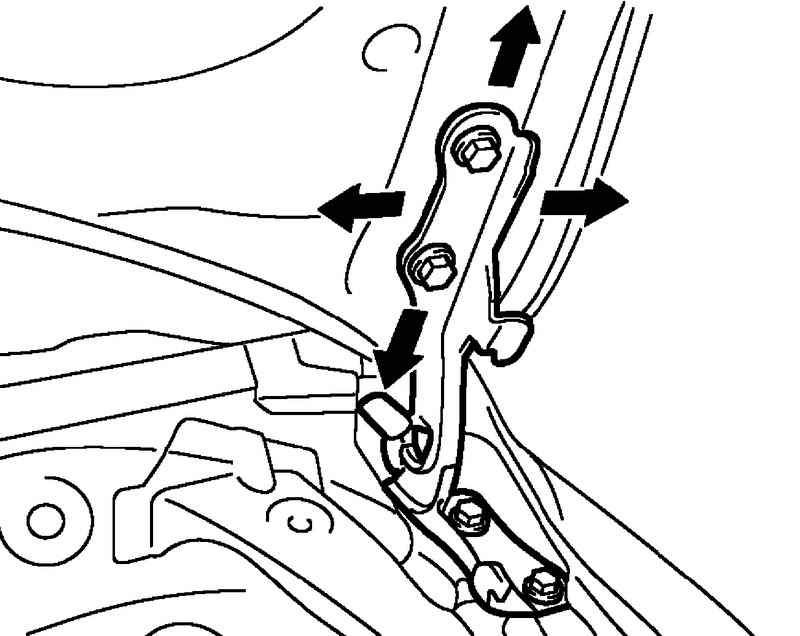
 Это трудно найти. К счастью, перепечатанные версии доступны через Brothers Trucks. Изучив процедуру регулировки, мы набираем регулировочные винты с резиновым покрытием. Это требует терпения. Закрыв капот, мы перепроверим это много раз. Некоторое время спустя мы достигли желаемого зазора между капотом и капотом. В среднем 3/16 по всей длине, это то, к чему призывает наше руководство по ремонту. Новое отличие — капот. Теперь, когда он отремонтирован, петли сидят правильно. На данный момент формы капота и капота, кажется, не сильно отличаются, но давайте перепроверим и это. Некоторое время назад мы купили новое уплотнение капота к капоту. Это от Brothers Trucks. Он довольно мягкий, поэтому мы не ожидаем, что он сильно повлияет на высоту капота или ширину зазора. Сюрприз! Несмотря на свою мягкость, уплотнитель удерживает капот немного выше, что также немного открывает зазор. Не будем торопиться перестраиваться. Новое уплотнение в конечном итоге будет соответствовать требованиям. Итак, мы сделали этот специальный инструмент, но колпак подходит лучше, чем в прошлый раз.
Это трудно найти. К счастью, перепечатанные версии доступны через Brothers Trucks. Изучив процедуру регулировки, мы набираем регулировочные винты с резиновым покрытием. Это требует терпения. Закрыв капот, мы перепроверим это много раз. Некоторое время спустя мы достигли желаемого зазора между капотом и капотом. В среднем 3/16 по всей длине, это то, к чему призывает наше руководство по ремонту. Новое отличие — капот. Теперь, когда он отремонтирован, петли сидят правильно. На данный момент формы капота и капота, кажется, не сильно отличаются, но давайте перепроверим и это. Некоторое время назад мы купили новое уплотнение капота к капоту. Это от Brothers Trucks. Он довольно мягкий, поэтому мы не ожидаем, что он сильно повлияет на высоту капота или ширину зазора. Сюрприз! Несмотря на свою мягкость, уплотнитель удерживает капот немного выше, что также немного открывает зазор. Не будем торопиться перестраиваться. Новое уплотнение в конечном итоге будет соответствовать требованиям. Итак, мы сделали этот специальный инструмент, но колпак подходит лучше, чем в прошлый раз.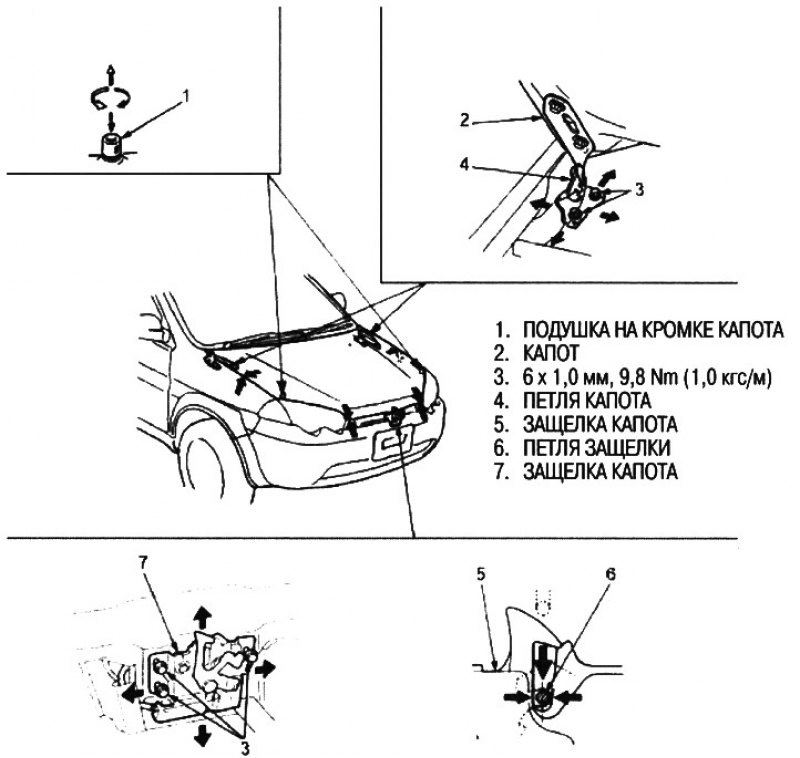 Если нам здесь повезет, нам, возможно, не понадобится тонкая настройка заднего края. Если капот действительно нуждается в тонкой настройке, мы осторожно закроем его на инструменте, переместим и повторим при необходимости. Во-первых, давайте еще раз проверим существующий зазор с помощью бумажных щупов. Здесь капот слегка приоткрыт, где щель самая узкая. Это обнадеживает. Были хороши!
Если нам здесь повезет, нам, возможно, не понадобится тонкая настройка заднего края. Если капот действительно нуждается в тонкой настройке, мы осторожно закроем его на инструменте, переместим и повторим при необходимости. Во-первых, давайте еще раз проверим существующий зазор с помощью бумажных щупов. Здесь капот слегка приоткрыт, где щель самая узкая. Это обнадеживает. Были хороши!
 н. экструзионную головку), сечение которого соответствует конфигурации изделия. Процесс переработки материалов в Э. называется экструзией. Поскольку в последнее время микрофибру выдавливают в форме двойной нити (внутренняя полиамидная «звёздочка» и внешний полиэстеровый контур), технология её производства ещё более усложнилась. На выходе из экструдера охлаждение двойной нити водой приводит к отделению полиамидной и полиэстеровой составляющих нити, в результате чего каждая микронить имеет очень высокую площадь микрозазоров, что и приводит к высокой впитывающей способности ткани. Подробнее об экструзии на соответствующей странице Википедии. Конечное качество микрофибры зависит от геометрических параметров нитей, конуса сжатия в экструдере и температурного режима и др.
н. экструзионную головку), сечение которого соответствует конфигурации изделия. Процесс переработки материалов в Э. называется экструзией. Поскольку в последнее время микрофибру выдавливают в форме двойной нити (внутренняя полиамидная «звёздочка» и внешний полиэстеровый контур), технология её производства ещё более усложнилась. На выходе из экструдера охлаждение двойной нити водой приводит к отделению полиамидной и полиэстеровой составляющих нити, в результате чего каждая микронить имеет очень высокую площадь микрозазоров, что и приводит к высокой впитывающей способности ткани. Подробнее об экструзии на соответствующей странице Википедии. Конечное качество микрофибры зависит от геометрических параметров нитей, конуса сжатия в экструдере и температурного режима и др.

 Вещи быстро высыхают в теплом и сухом помещении. Еще одна причина популярности микрофибры — ее универсальность: пряжа подходит для вязания спицами и крючком. Последним вязать сложнее, но со временем вырабатываются нужные навыки.
Вещи быстро высыхают в теплом и сухом помещении. Еще одна причина популярности микрофибры — ее универсальность: пряжа подходит для вязания спицами и крючком. Последним вязать сложнее, но со временем вырабатываются нужные навыки. Так бывает, если была куплена жесткая микрофибра. Она, кстати, востребована для вещей, которые должны держать форму. Для пополнения детского гардероба производители предлагают мягкую пряжу.
Так бывает, если была куплена жесткая микрофибра. Она, кстати, востребована для вещей, которые должны держать форму. Для пополнения детского гардероба производители предлагают мягкую пряжу. Обойдется он, конечно, дорого и времени придется затратить немало, но зато получится шикарная вещь, дышащая, без катышков.
Обойдется он, конечно, дорого и времени придется затратить немало, но зато получится шикарная вещь, дышащая, без катышков.
 Вязаные вещи не только красивы и оригинальны, но и практичны. Вы всегда можете надвязать или распустить и связать заново джемпер, шарф, шапочку ребенку, когда он подрастет.
Вязаные вещи не только красивы и оригинальны, но и практичны. Вы всегда можете надвязать или распустить и связать заново джемпер, шарф, шапочку ребенку, когда он подрастет. И ассортимент отличный.
И ассортимент отличный. Нитки отличные. Только здесь есть наличие практически всех цветов, даже для самых необыкновенных залдумок. Заказала самый ярко-зелёный мохер классик от Ализе. Буду вязать жизнеутверждающий джемпер! Стильо0красиво и ярко.
Нитки отличные. Только здесь есть наличие практически всех цветов, даже для самых необыкновенных залдумок. Заказала самый ярко-зелёный мохер классик от Ализе. Буду вязать жизнеутверждающий джемпер! Стильо0красиво и ярко. В общем, я всем довольна, ещё и подруг своих познакомила с этим магазином, за что они мне благодарны по сию пору! Спасибо вам, рада, что вы есть в нашем городе.. А если б ещё и бобинную пряжу начали завозить, стало бы идеально!
В общем, я всем довольна, ещё и подруг своих познакомила с этим магазином, за что они мне благодарны по сию пору! Спасибо вам, рада, что вы есть в нашем городе.. А если б ещё и бобинную пряжу начали завозить, стало бы идеально! Микроволокна обеспечивают циркуляцию воздуха между верхним листом и наматрасником, так что вы не застрянете под ним в течение всего дня, сохраняя при этом достаточное тепло ночью (в зависимости от сезона).
Микроволокна обеспечивают циркуляцию воздуха между верхним листом и наматрасником, так что вы не застрянете под ним в течение всего дня, сохраняя при этом достаточное тепло ночью (в зависимости от сезона). Если они не рвутся и не изнашиваются, скорее всего, они сделаны из хорошей микрофибры. Хорошая микрофибра гладкая и мягкая на ощупь, но не слишком мягкая — если вы не можете отличить свою руку от простыни, которую стирали сотни раз, скорее всего, это ткань более низкого качества.
Если они не рвутся и не изнашиваются, скорее всего, они сделаны из хорошей микрофибры. Хорошая микрофибра гладкая и мягкая на ощупь, но не слишком мягкая — если вы не можете отличить свою руку от простыни, которую стирали сотни раз, скорее всего, это ткань более низкого качества.
 Чем чаще вы стираете простыни (и, следовательно, разрушаете волокна), тем меньше вероятность того, что со временем у вас возникнет аллергическая реакция на них.
Чем чаще вы стираете простыни (и, следовательно, разрушаете волокна), тем меньше вероятность того, что со временем у вас возникнет аллергическая реакция на них. Поскольку они тонкие и легкие, они не удерживают тепло, как хлопок или другие материалы. Мягкая и гладкая. Если вы не любите колючие ощущения от традиционных хлопковых простыней, микрофибра может быть для вас!
Поскольку они тонкие и легкие, они не удерживают тепло, как хлопок или другие материалы. Мягкая и гладкая. Если вы не любите колючие ощущения от традиционных хлопковых простыней, микрофибра может быть для вас!

 Это одна из самых популярных тканей для пошива постельного белья. Это универсальный материал, который очень удобен по многим причинам.
Это одна из самых популярных тканей для пошива постельного белья. Это универсальный материал, который очень удобен по многим причинам. Хлопковое постельное белье легко прослужит до 6 лет, так что это хорошая инвестиция, если вы выберете хлопковое постельное белье.
Хлопковое постельное белье легко прослужит до 6 лет, так что это хорошая инвестиция, если вы выберете хлопковое постельное белье. Покупая хлопковое постельное белье, вы можете встретить хлопок пима, египетский хлопок, горный хлопок и т. д. Горный хлопок распространен и легко доступен. Хлопок Prima и египетский хлопок экстра-длинный и считается высшим качеством. См. «сверхдлинные скобы» на этикетке, что означает, что этот лист более прочный, чем другие.
Покупая хлопковое постельное белье, вы можете встретить хлопок пима, египетский хлопок, горный хлопок и т. д. Горный хлопок распространен и легко доступен. Хлопок Prima и египетский хлопок экстра-длинный и считается высшим качеством. См. «сверхдлинные скобы» на этикетке, что означает, что этот лист более прочный, чем другие. Ниже приведены некоторые из них:
Ниже приведены некоторые из них: Это также самый популярный вид хлопка в Соединенных Штатах, на долю которого приходится 95 процентов всего хлопка, выращиваемого на американской земле.
Это также самый популярный вид хлопка в Соединенных Штатах, на долю которого приходится 95 процентов всего хлопка, выращиваемого на американской земле. Будучи синтетической тканью, эти простыни более прочны, не мнутся и не садятся после стирок. Материал приятный на ощупь и хорошо пропускает воздух.
Будучи синтетической тканью, эти простыни более прочны, не мнутся и не садятся после стирок. Материал приятный на ощупь и хорошо пропускает воздух. Эти простыни гладкие и скользкие, чем-то напоминающие атлас или шелк. Большое количество нитей определяет не только мягкость, но и долговечность листов. Чем выше количество нитей, тем мягче лист.
Эти простыни гладкие и скользкие, чем-то напоминающие атлас или шелк. Большое количество нитей определяет не только мягкость, но и долговечность листов. Чем выше количество нитей, тем мягче лист. Они доступны из-за предпочтений людей. Некоторым может понравиться большее количество потоков, в то время как другим нужен красивый внешний вид. Мы описали распространенные сорта, чтобы помочь вам выбрать правильный.
Они доступны из-за предпочтений людей. Некоторым может понравиться большее количество потоков, в то время как другим нужен красивый внешний вид. Мы описали распространенные сорта, чтобы помочь вам выбрать правильный. К ним относятся:
К ним относятся:
 Эти простыни лучше всего подходят для людей с чувствительной кожей, так как они не вызывают аллергии и не раздражают кожу. Уровень комфорта этих простыней потрясающий, и любой будет ими доволен. Кроме того, эти простыни становятся более удобными с каждой стиркой.
Эти простыни лучше всего подходят для людей с чувствительной кожей, так как они не вызывают аллергии и не раздражают кожу. Уровень комфорта этих простыней потрясающий, и любой будет ими доволен. Кроме того, эти простыни становятся более удобными с каждой стиркой. С другой стороны, хлопок более высокого качества смягчается при каждой стирке, не вызывая износа хлопка.
С другой стороны, хлопок более высокого качества смягчается при каждой стирке, не вызывая износа хлопка. Хлопковое постельное белье подходит для тех, кто спит в горячем состоянии, благодаря своим характеристикам.
Хлопковое постельное белье подходит для тех, кто спит в горячем состоянии, благодаря своим характеристикам.


 Решающее влияние на них оказывает рабочий объем, степень сжатия и среднее значение компрессии.
Решающее влияние на них оказывает рабочий объем, степень сжатия и среднее значение компрессии. : «мощность»).
: «мощность»). : «момент силы»).
: «момент силы»).
 Наряду с отличной плавностью работы, низким расходом топлива и незначительным выбросом вредных веществ она также обеспечивает высокие показатели мощности и крутящего момента.
Наряду с отличной плавностью работы, низким расходом топлива и незначительным выбросом вредных веществ она также обеспечивает высокие показатели мощности и крутящего момента.

 Поэтому наддувочный воздух сначала проходит через интеркулер, и лишь после этого подается к камерам сгорания.
Поэтому наддувочный воздух сначала проходит через интеркулер, и лишь после этого подается к камерам сгорания.
 При этом через блок цилиндров и головку блока цилиндров проходят охлаждающие каналы, по которым циркулирует охлаждающая жидкость, поглощающая тепло. затем по шлангам и трубопроводам контура циркуляции охлаждающая жидкость попадает к радиатору, через поверхность которого отдает тепла в атмосферу. После этого остывшая охлаждающая жидкость течет обратно к двигателю.
При этом через блок цилиндров и головку блока цилиндров проходят охлаждающие каналы, по которым циркулирует охлаждающая жидкость, поглощающая тепло. затем по шлангам и трубопроводам контура циркуляции охлаждающая жидкость попадает к радиатору, через поверхность которого отдает тепла в атмосферу. После этого остывшая охлаждающая жидкость течет обратно к двигателю. к улучшению плавности хода двигателя.
к улучшению плавности хода двигателя. Это обеспечивает повышенную жесткость.
Это обеспечивает повышенную жесткость.
 Тот в свою очередь инициирует осевое перемещение шестерни, за счет чего
Тот в свою очередь инициирует осевое перемещение шестерни, за счет чего
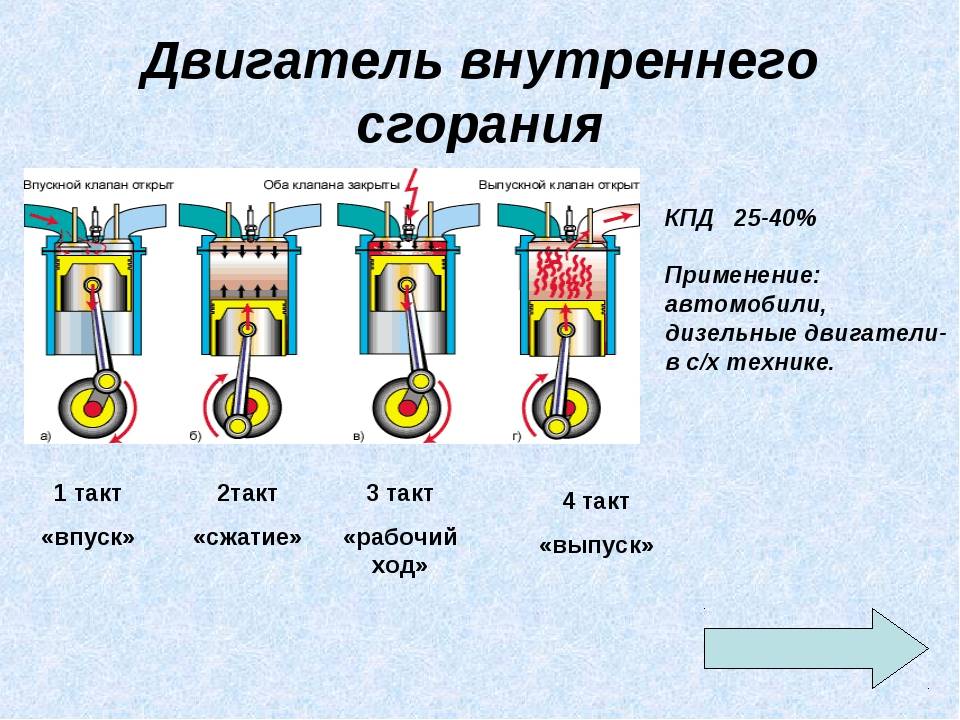
 Затем клапан закрывается, а поршень доходит до нижней мертвой точки.
Затем клапан закрывается, а поршень доходит до нижней мертвой точки.
 Однако эксперты CFMOTO не советуют вмешиваться в работу двигателя самостоятельно. Если вам необходимо ТО или ремонт квадроцикла, обратитесь в ближайший дилерский центр CFMOTO в вашем городе.
Однако эксперты CFMOTO не советуют вмешиваться в работу двигателя самостоятельно. Если вам необходимо ТО или ремонт квадроцикла, обратитесь в ближайший дилерский центр CFMOTO в вашем городе.
 8(H)
8(H)





 Список рекомендуемых устройств содержит только часть этих устройств — дополнительные устройства, поддерживающие ARKit или ARCore, также могут поддерживать расширенные функции через Vuforia Fusion. Полный список см. в матрице совместимости устройств ARKit и поддерживаемых ARCore устройствах.
Список рекомендуемых устройств содержит только часть этих устройств — дополнительные устройства, поддерживающие ARKit или ARCore, также могут поддерживать расширенные функции через Vuforia Fusion. Полный список см. в матрице совместимости устройств ARKit и поддерживаемых ARCore устройствах.
 Для эквивалентной функциональности используйте SDK, предоставленный OEM.
Для эквивалентной функциональности используйте SDK, предоставленный OEM.