
Что такое датчик Холла?
Датчик Холла (датчик положения) представляет собой датчик магнитного поля. Работа устройства основана на эффекте Холла. Данный эффект основан на следующем принципе: если поместить определенный проводник с постоянным током в магнитное поле, то в таком проводнике возникает поперечная разность потенциалов (напряжение Холла). Другими словами, устройство служит для измерения напряжённости магнитного поля. Сегодня датчик Холла может быть как аналоговым, так и цифровым.
Сфера применения датчиков Холла очень широка. Устройство используется в таких схемах, где требуется бесконтактное измерение силы тока. Что касается автомобилей, датчик Холла служит для измерения угла положения распределительного или коленчатого вала, а также нашел свое применение в системе зажигания, указывая на момент образования искры.
Содержание статьи
- Как работает датчик Холла
- Аналоговые и цифровые решения
- Самостоятельная проверка устройства
Как работает датчик Холла
Во время своих исследований в 1879 году физик Холл выявил такой эффект, что если в магнитном поле находится пластина, на которую подается напряжение (ток протекает через пластину), тогда электроны в указанной пластине начинают отклоняться. Такое отклонение происходит перпендикулярно по отношению к тому направлению, которое имеет магнитный поток.
Такое отклонение происходит перпендикулярно по отношению к тому направлению, которое имеет магнитный поток.
Также направление этого отклонения происходит в зависимости от той полярности, которую имеет магнитное поле. Получается, электроны будут иметь разную плотность на разных сторонах пластины, создавая разные потенциалы. Обнаруженное явление получило название эффект Холла.
Другими словами, Холл поместил прямоугольную полупроводниковую пластину в магнитное поле и на узкие грани такого полупроводника подал ток. В результате на широких гранях появилось напряжение. Дальнейшее развитие технологий позволило создать на основе обнаруженного эффекта компактное устройство-датчик. Главным преимуществом датчиков подобного рода выступает то, что частота срабатывания устройства не смещает момент измерения. Выходной сигнал от такого устройства всегда устойчивый, без всплесков.
Простейший датчик состоит из:
- постоянного магнита;
- лопасти ротора;
- магнитопроводов;
- пластикового корпуса;
- электронной микросхемы;
- контактов;
Работа устройства построена на следующей схеме: через зазор осуществляется проход металлической лопасти ротора, что позволяет шунтировать магнитный поток. Результатом становится нулевой показатель индукции на микросхеме. Выходной сигнал по отношению к массе практически равняется показателю напряжения питания.
Результатом становится нулевой показатель индукции на микросхеме. Выходной сигнал по отношению к массе практически равняется показателю напряжения питания.
Датчик Холла в системе зажигания является аналоговым преобразователем, который непосредственно коммутирует питание.
Среди недостатков стоит выделить чувствительность устройства к электромагнитным помехам, которые могут возникнуть в цепи. Также наличие электронной схемы в устройстве датчика несколько снижает его надежность.
Рекомендуем также прочитать статью об устройстве топливного электробензонасоса, а также о механическом решении. Из этой статьи вы узнаете о назначении, конструктивных особенностях и принципах работы данных устройств.
Аналоговые и цифровые решения
Датчики на основе эффекта Холла фиксируют разницу потенциалов. Аналоговое решение, рассмотренное выше, основано на преобразовании индукции поля в напряжение с учетом полярности и силы поля.
Принцип работы цифрового датчика состоит в фиксации присутствия или отсутствие поля.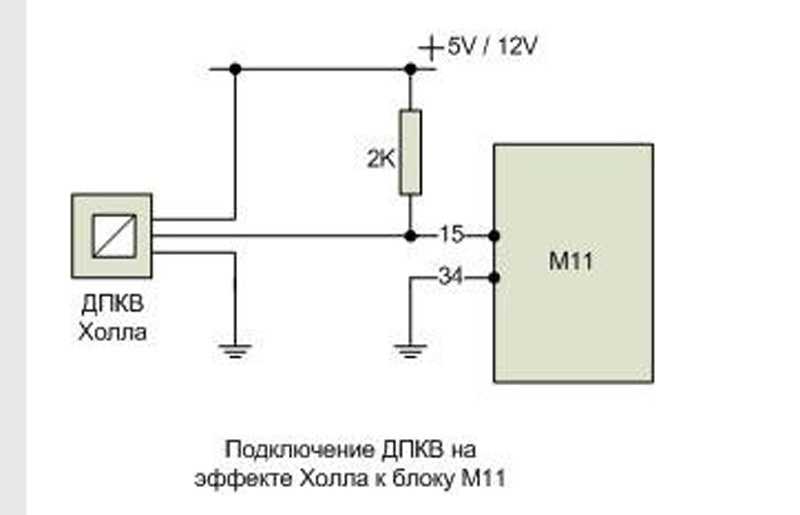 В случае достижения индукцией определенного показателя датчик отмечает наличие поля. Если индукция не соответствует необходимому показателю, тогда цифровой датчик показывает отсутствие поля. Чувствительность датчика определяется его способностью фиксировать поле при той или иной индукции.
В случае достижения индукцией определенного показателя датчик отмечает наличие поля. Если индукция не соответствует необходимому показателю, тогда цифровой датчик показывает отсутствие поля. Чувствительность датчика определяется его способностью фиксировать поле при той или иной индукции.
Цифровой датчик Холла может быть биполярным и униполярным. В первом случае срабатывание и отключение устройства происходит посредством смены полярности. Во втором случае включение происходит при появлении поля, отключается датчик в результате того, что индукция снижается.
Самостоятельная проверка устройства
Активное использование данного устройства в автомобилях означает, что при появлении определенных неисправностей или сбоев в работе ДВС может возникнуть острая необходимость проверить датчик Холла своими руками.
Перед началом работ по отсоединению разъема кабеля, который подключен к устройству, следует обязательно выключать зажигание!
Игнорирование данного правила может вывести датчик Холла из строя.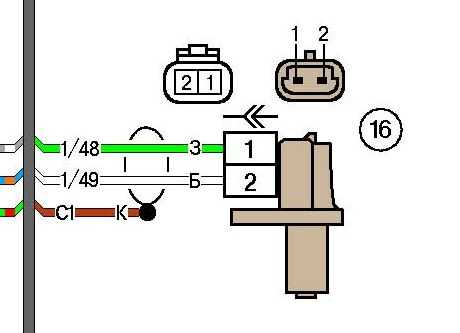 Необходимо добавить, что проверка устройства при помощи контрольной лампы также недопустима.
Необходимо добавить, что проверка устройства при помощи контрольной лампы также недопустима.
- Одним из самых быстрых способов проверки является установка заведомо исправного подменного датчика на автомобиль. Если признаки неисправности после установки исчезают, тогда причина очевидна.
- Вторым способом, который подойдет для проверки датчика в системе зажигания, является проверка наличия искры в момент включения зажигания. Дополнительно потребуется осуществить подсоединение концов провода к нужным выходам на коммутаторе.
- Для максимально точной диагностики устройство лучше всего поверять при помощи осциллографа. Также в определенных условиях датчик проверяют при помощи мультиметра. Указанный мультиметр переводят в режим вольтметра, после чего подсоединяют к выходному контакту на датчике. Рабочий датчик Холла выдаст показания от 0.4 Вольт до 3-х. Если показания ниже минимального порога, тогда высока вероятность выхода датчика из строя.
Датчики положения (индуктивный датчик, датчик Холла)
Датчики положения (индуктивный датчик, датчик Холла) |
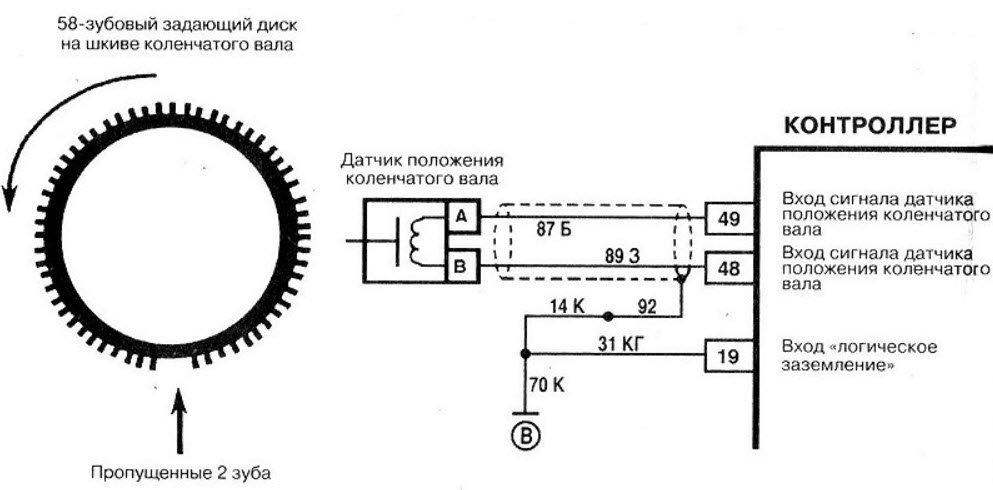
Для измерения скорости вращения и определения положения различных узлов двигателя используются датчики положения. К ним относятся: датчик положения коленчатого вала (ДПКВ), датчик положения распределительного вала (ДПРВ) или датчик фазы (ДФ), датчик скорости (ДС), датчики ABS.
Сигнал ДПКВ используется для определения частоты вращения КВ, а также его мгновенного положения. Т.к. частоты вращения распределительного и коленчатого валов соотносятся как 1:2, то только по сигналу ДПКВ невозможно однозначно определить находится ли поршень двигателя, движущийся к ВМТ, на такте сжатия или выпуска. Фазный датчик на распределительном валу передает эту информацию в блок управления.
Сигналы ДПКВ (синий) и ДПРВ (зеленый)
К наиболее распространенным типам этих датчиков относятся: индуктивный (электромагнитный) датчик и датчик Холла.
Индуктивный датчик
Этот тип датчика наиболее распространен в качестве ДПКВ. Датчик монтируется поблизости от подвижного элемента, называемого маркерным диском. Этот элемент представляет собой стальной диск с зубьями, который жестко зафиксирован на коленчатом валу (может находиться как со стороны ременной передачи, так и непосредственно на маховике КВ).
Расположение ДПКВ
1. ДПКВ
2. Маркерный диск
3. Разъем датчика
Датчик состоит из обмотки с сердечником из постоянного магнита. Когда зуб проходит перед датчиком, это приводит к усилению магнитного потока, проходящего через обмотку. Напротив, увеличение зазора ослабляет этот поток. Происходит изменение магнитного поля, которое вызывает появление индукционного тока в обмотке.
Конструкция индуктивного датчика
1. Обмотка
2. Метка на маркерном диске в виде пропущенных зубьев
3. Постоянный магнит
Маркерный диск может иметь как пропуски зубьев, так и более широкие зубья.
Кол-во зубьев маркерного диска зависит от его назначения и модели авто. В качестве маркерного диска для КВ наиболее распространенным является диск с 60-ю зубьями, при этом два зуба пропущены. Зазор с пропущенными зубьями предназначен для отметки определенного положения коленчатого вала и служит как установочная метка для синхронизации блока управления.
Пример сигнала индуктивного датчика ABS
В варианте исполнения для ДПРВ, маркерный диск может иметь всего один зуб, т. к. в данном случае нет необходимости измерять скорость вращения, нужно определить только положение РВ для определения фазы работы двигателя.
к. в данном случае нет необходимости измерять скорость вращения, нужно определить только положение РВ для определения фазы работы двигателя.
Для дальнейшего анализа электронный блок производит преобразование аналогового сигнала в цифровой. Амплитуда напряжения сигнала пропорциональна скорости прохождения подвижной детали перед датчиком. Напряжение также в значительной степени зависит от расстояния между вершинами зубьев и поверхностью датчика, как правило, зазор составляет 1±0,5 мм. Подсчитывая число импульсов в течение заданного промежутка времени, электронный блок может определить скорость вращения КВ.
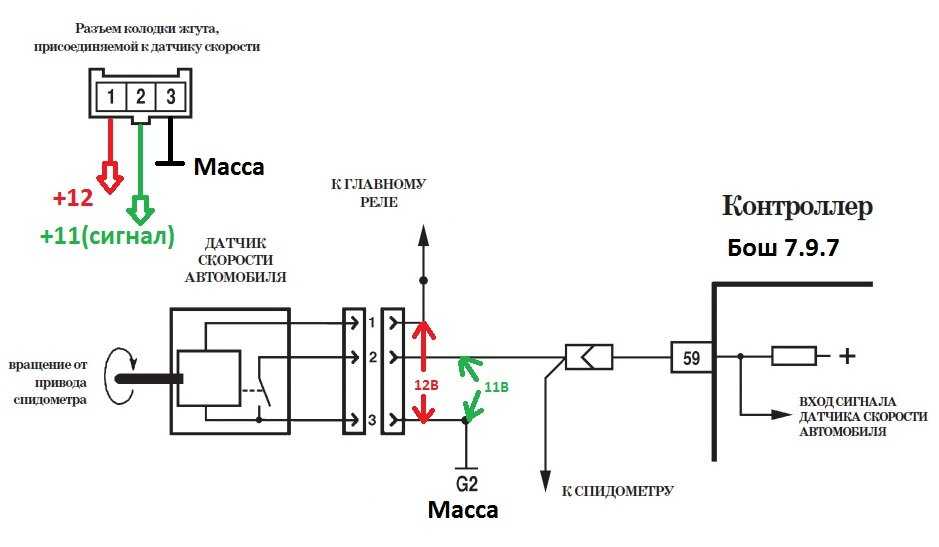
Пример схемы подключения ДПКВ
Для записи осциллограммы индуктивного датчика, необходимо подключиться измерительным щупом непосредственно к сигнальному выходу датчика либо к разъему со стороны ЭБУ.
Подключение мотор-тестера к ДПКВ (цветовая маркировка проводов указана в качестве примера)
Датчик Холла
В таких датчиках использован эффект Холла. Интегральная схема датчика Холла располагается между маркерным диском и постоянным магнитом.
Датчик Холла
1.
Постоянный магнит
2.
Интегральная схема Холла.
3.
Маркерный диск
4.
Разъем датчика
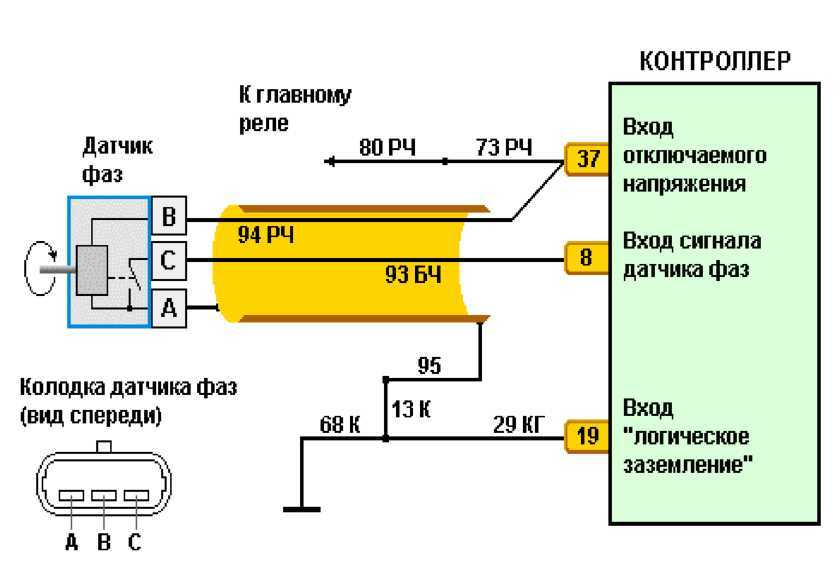
Как правило, датчик Холла имеет три вывода: питание +5В (+12В), «земля», сигнальный выход.
Пример схемы подключения ДПРВ
Для записи осциллограммы датчика Холла, необходимо подключиться измерительным щупом непосредственно к сигнальному выходу датчика либо к разъему ЭБУ.
Подключение мотор-тестера к ДПРВ (цветовая маркировка проводов указана в качестве примера)
Для записи сигнала ДПКВ рекомендуется использовать 2ой аналоговый канал мотор-тестера, для сигнала ДПРВ — 3ий канал. При наличии нескольких ДПРВ, можно использовать любой свободный аналоговый канал.
Настройка аналогового канала для индуктивного датчика
Настройка аналогового канала для датчика Холла
Дополнительные возможности ПО:
Автоподстройка линейки по любому «стандартному ДПКВ» (тема на форуме)
Одновременный анализ сигналов ДПКВ и ДПРВ позволяет проверить работу этих датчиков, а также правильность установки КВ и РВ (соответствие меток ГРМ).
автор: Евгений Куришко
Датчик положения коленчатого вала (эффект Холла)
- Дом
- Библиотека
- Автомобильные пошаговые испытания
- Датчик положения коленчатого вала (эффект Холла) — работает
Изделия, подходящие для этого управляемого теста*
Щупы мультиметра
Набор датчиков для обратного штифта
£34.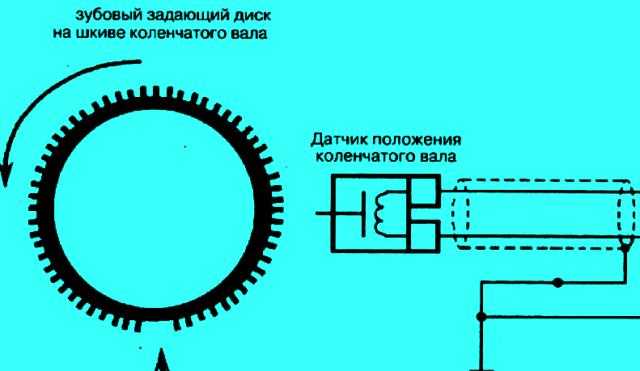 00
00Гибкий штифтовой зонд
Зажим для аккумулятора PicoScope
*В Pico мы всегда стремимся улучшить нашу продукцию. Инструменты, использованные в этом пошаговом тесте, могли быть заменены, а вышеперечисленные продукты являются нашими последними версиями, используемыми для диагностики неисправности, задокументированной в этом тематическом исследовании.
Целью данного теста является проверка выходного сигнала напряжения от датчика положения коленчатого вала на эффекте Холла (CKP) при работающем двигателе.
Как выполнить тест
Просмотрите рекомендации по подключению.
- Используйте данные производителя для идентификации сигнальной цепи датчика коленчатого вала.
- Подключите PicoScope Канал A к цепи.
- Свернуть страницу справки. Вы увидите, что PicoScope отобразил образец сигнала и настроен на захват вашего сигнала.

- Запустите область , чтобы увидеть данные в реальном времени.
- Запустите двигатель и дайте ему поработать на холостом ходу.
- С вашей осциллограммой на экране остановите осциллограф.
- Выключите двигатель.
- Использование буфера сигналов , Масштаб и Измерения инструментов для изучения формы волны.
Пример сигнала
Примечания к форме волны
Эта заведомо исправная форма волны имеет следующие характеристики:
- Цифровой сигнал, переключающийся с низкого напряжения, чуть выше 0 В, на высокое напряжение, чуть ниже 5 В.
- Чистые переходы между двумя стабильными уровнями напряжения.
- Нет чрезмерного хеширования или периодических пропаданий сигнала.
- Частота переключения, увеличивающаяся с увеличением оборотов двигателя.
- Периодическое уменьшение частоты переключения, в результате чего она кажется почти вдвое меньше.
 В данном примере эти события происходят через каждые 180° поворота коленчатого вала.
В данном примере эти события происходят через каждые 180° поворота коленчатого вала.
Библиотека сигналов
Перейдите к строке раскрывающегося меню в нижнем левом углу окна Библиотеки сигналов и выберите Датчик коленчатого вала (эффект Холла)
Дополнительные указания
Датчик положения коленчатого вала (CKP) передает в модуль управления двигателем (ECM) первичный эталонный сигнал синхронизации. ECM использует его для расчета частоты вращения и положения двигателя для точного управления впрыском и т. д. Этот сигнал также используется для обнаружения аномалий частоты вращения двигателя из-за пропусков зажигания и т. д.
Неудивительно, что датчики CKP на эффекте Холла используют эффект Холла, который создает разность потенциалов (известную как напряжение Холла) по ширине проводника, когда по его длине протекает ток, а магнитное поле приложено перпендикулярно к тока (т. е. через направление проводника снизу вверх). Когда ток фиксирован, чем больше напряженность магнитного поля, тем больше напряжение эффекта Холла.
Когда ток фиксирован, чем больше напряженность магнитного поля, тем больше напряжение эффекта Холла.
Датчики имеют встроенные схемы кондиционирования, которые преобразуют напряжение на эффекте Холла в стабильный цифровой выходной сигнал, переключающийся между 0 В и 5 В. Поскольку они потребляют энергию, датчики на эффекте Холла CKP требуют цепей подачи напряжения и заземления.
Датчик сопровождается импульсным колесом, обычно состоящим из 36 или 60 зубьев и расположенным по окружности маховика. При вращении импульсного колеса каждый зубец проходит сквозь него и возмущает магнитное поле датчика, которое модулирует напряжение Холла. В зависимости от схемы датчика выходной сигнал цифрового датчика переключается либо с низкого уровня на высокий (от 0 В до 5 В), либо с высокого на низкий (от 5 В до 0 В). Следовательно, выходной сигнал датчика представляет собой прямоугольную волну с частотой переключения, зависящей от частоты вращения коленчатого вала.
Импульсные колеса имеют один или несколько зазоров между двумя зубьями, которые указывают ECM конкретное положение коленчатого вала. Их часто ошибочно принимают за индикаторы TDC или BDC.
Их часто ошибочно принимают за индикаторы TDC или BDC.
Сигнал датчика положения коленчатого вала имеет решающее значение для работы блока управления двигателем, и сбои могут вызывать такие симптомы, как:
- Двигатель прокручивается, но не запускается
- Отключение двигателя
- Лампа индикатора неисправности (MIL) освещение
- Диагностические коды неисправностей (DTC)
Связанные сбои:
- Короткое замыкание или обрыв цепи или высокое сопротивление цепи.
- Неисправность внутренней цепи датчика.
- Ошибки сигнала из-за чрезмерного загрязнения или мусора на корпусе датчика или импульсном колесе.
- Неправильная установка или работа датчика или компонентов коленчатого вала, вызывающая:
- Чрезмерные зазоры между датчиком и импульсным колесом.
- Повреждение корпуса датчика или импульсного колеса.
- Чрезмерное движение или вибрация кривошипа или маховика.
Diagnostic trouble codes
Selection of component related Diagnostic Trouble Codes (DTCs)
P0016
P0315
P0335
P0336
P0337
P0338
P0339
P0385
P0386
P0387
P0388
P0389
P1324
P1335
P1336
P1345
P1372
Подробнее
Отказ от ответственности
Этот раздел справки может быть изменен без уведомления. Информация внутри тщательно проверяется и считается достоверной. Эта информация является примером наших исследований и выводов и не является окончательной процедурой.
Pico Technology не несет ответственности за неточности. Каждое транспортное средство может быть разным и требует уникального теста
настройки.
Помогите нам улучшить наши тесты
Мы знаем, что наши пользователи PicoScope умны и креативны, и мы будем рады получить ваши идеи по улучшению этого теста.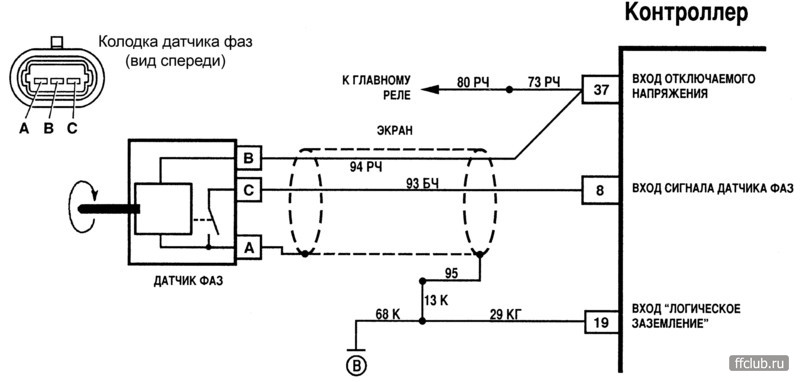 Нажмите Добавить комментарий кнопка оставить отзыв.
Нажмите Добавить комментарий кнопка оставить отзыв.
Добавить комментарий
MicroSquirt® Введение
MicroSquirt® Введение| Нажмите на кнопки меню ниже, чтобы быстро найти информацию о MegaSquirt®: Безопасность Информация Поддержка Форум
|
Входы датчика зажигания для вашего контроллера MicroSquirt®
При обновлении до версии 3 схема интерфейса переменного сопротивления (VR) вашего контроллера MicroSquirt® была заменена новой схемой, использующей интегральную схему Maxim MAX992x.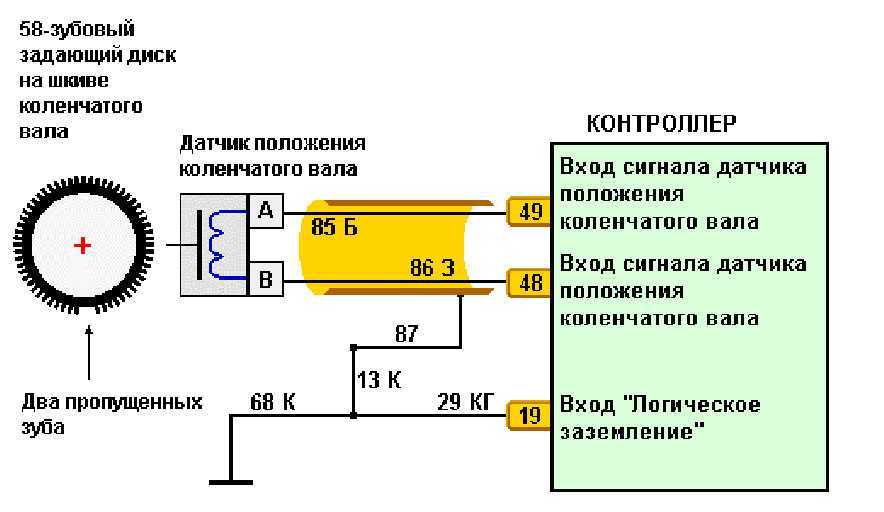 Эта интерфейсная схема предлагает адаптивный порог срабатывания для датчиков VR и может использоваться для непосредственного взаимодействия с датчиками Холла.
Эта интерфейсная схема предлагает адаптивный порог срабатывания для датчиков VR и может использоваться для непосредственного взаимодействия с датчиками Холла.
Вот блок-схема нового интерфейса VR:
Схема работает как дифференциальный усилитель, за которым следует секция компаратора. Обратите внимание, что схема в целом представляет собой схему инвертирования уровня (из-за каскада компаратора). В предыдущих поколениях контроллеров MicroSquirt® использовалась неинвертирующая реализация усилителя VR. Для обеспечения совместимости сигнальные входы VR+ и VR- (на MicroSquirt® AMPSEAL) подключаются к входам (-) и (+) дифференциального усилителя MAX992x соответственно, см. рисунок. Другими словами, вход VR+ AMPSEAL подключается к инвертирующему (-) входу на MAX9.92x, а VR- подключается к неинвертирующему (+) входу. Этот метод подключения не имеет никакого значения для пользователя, фактически он делает использование схемы более простым.
Благодаря новому интерфейсу виртуальной реальности на контроллере V3 MicroSquirt® необходимо учитывать несколько моментов при подключении к датчикам виртуальной реальности или Холла. Первое, что нужно иметь в виду, это то, что новая схема определяет уровни напряжения между двумя входами (VR+ и VR-). Новая схема интерфейса VR выводит оба из них на контакты AMPSEAL и для обоих каналов VR (Crank и CAM). Таким образом, важно использовать оба входа при подключении к датчику VR.
Первое, что нужно иметь в виду, это то, что новая схема определяет уровни напряжения между двумя входами (VR+ и VR-). Новая схема интерфейса VR выводит оба из них на контакты AMPSEAL и для обоих каналов VR (Crank и CAM). Таким образом, важно использовать оба входа при подключении к датчику VR.
Во-вторых, в интерфейсе датчика VR предыдущего контроллера MicroSquirt® схема была привязана к земле, что означает, что обратный путь от датчика VR имеет потенциал 0 вольт (или уровень земли). С новой интерфейсной схемой MicroSquirt® V3 на вход VR подается слабое подтягивающее напряжение 2,5 В через внутренний резистор, подключенный к дифференциальному усилителю MAX992x (см. рисунок выше). Кроме того, на вход компаратора MAX992x (+) также подается 2,5 В — это напряжение будет автоматически регулироваться в зависимости от текущего адаптивного режима, но центральное значение составляет около 2,5 В. Поэтому важно подключить оба провода датчика VR к входам VR+ и VR-. Также убедитесь, что нет внутреннего соединения датчика VR с землей — используйте мультиметр в режиме измерения сопротивления, чтобы убедиться. Большинство сигналов датчика VR плавающие и не подключаются к земле.
Большинство сигналов датчика VR плавающие и не подключаются к земле.
Порог схемы MAX992x адаптируется к амплитуде входного сигнала, чтобы создать переменный адаптивный порог для подавления шума и триггеров ложных зубов. Однако диапазон входного напряжения схемы составляет от 0 до 5 вольт, напряжения за пределами этого диапазона фиксируются на шинах питания с помощью внутренних диодов корпуса. Тем не менее, некоторые ненагруженные датчики VR с высоким выходным сигналом могут легко генерировать напряжение, превышающее 100 вольт или более — этот диапазон напряжения ограничивается 0 и 5 вольт MAX9.92x. Это хорошо, однако обратите внимание, что адаптивный диапазон теперь также ограничен, в то время как амплитуды вставных зубов масштабируются напряжением VR и могут вызывать ложные срабатывания. В этом случае добавление шунтирующего резистора к датчику VR снизит общее напряжение VR и позволит адаптивному режиму работать даже при высоких оборотах. Плата контроллера MicroSquirt® V3 имеет перемычку для пайки, расположенную в нижней части печатной платы, которую можно использовать для добавления шунтирующего резистора.
Повышенное входное напряжение
(MAX992x)
Входное смещение в MAX992x упрощает работу с датчиками Холла, поскольку уровень компаратора находится на идеальном уровне — просто подключите датчик Холла к входу VR+ и оставьте вход VR- плавающим. Вам нужно будет использовать подтягивающий резистор для датчика Холла, либо до Vref, либо до +12 В, в зависимости от диапазона напряжения датчика Холла. Примечание: не припаивайте перемычку Rshunt к нижней части печатной платы контроллера MicroSquirt® — для датчика Холла шунт не требуется. Кроме того, для запуска сигнала TTL используйте вход VR+ для сигнала и оставьте вход VR- неподключенным.
Вот краткая таблица различных режимов работы и подключений:
| Режим | Подключение |
| Опто вход | 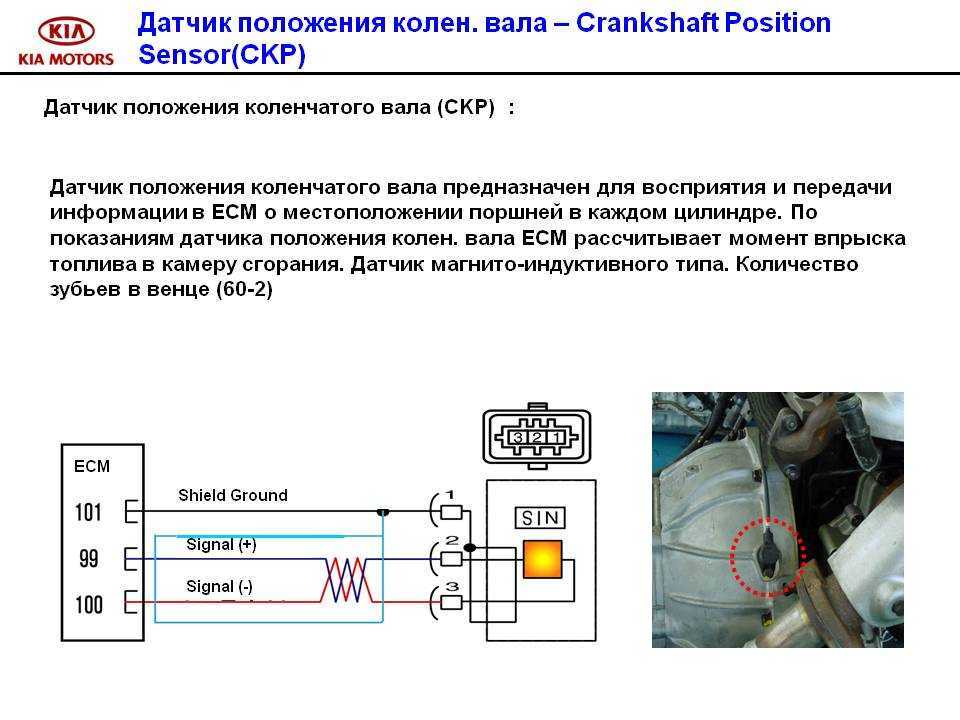 |
| Датчик VR | |
| Вход Холла |
V2/V3 Различия в жгутах проводов
Цвета проводов такие же, как и раньше. Единственными изменениями являются провода витой пары для VR и VR2 и новый контакт для VR2 (у VR2 раньше был общий контакт с другим VR, теперь это сбалансированная линия со своим собственным контактом).
Дополнительные советы по подключению
1) Убедитесь, что последовательный возврат находится на контакте 19 (Ampseal), а VR-возврат — на контакте 33. Расположение этих контактов не является случайным — на самом деле они имеют отдельные дорожки, которые возвращаются непосредственно к соответствующим схемам. Если вы посмотрите на эти контакты на плате контроллера MicroSquirt®, вы увидите дорожку на каждом из этих контактов — один идет к последовательному чипу, другой идет к правой стороне платы. Так что эти контакты должны быть правильными
Расположение этих контактов не является случайным — на самом деле они имеют отдельные дорожки, которые возвращаются непосредственно к соответствующим схемам. Если вы посмотрите на эти контакты на плате контроллера MicroSquirt®, вы увидите дорожку на каждом из этих контактов — один идет к последовательному чипу, другой идет к правой стороне платы. Так что эти контакты должны быть правильными
2) Для предыдущих версий контроллера MicroSquirt®, в которых используется конфигурация входной цепи V3, кабель должен быть коаксиальным, а экран должен быть обратным VR — это то, что поставляется со жгутом проводов. Коаксиальный кабель подходит для этого, потому что это несимметричная схема с заземлением (несбалансированная). В новой версии контроллера V3 MicroSquirt® необходимо использовать экранированную витую пару для микросхемы MAX992x, потому что это действительно симметричный линейный дифференциальный вход, и он действительно может извлечь из этого пользу. Это жгут, который будет поставляться с производственной версией V3.
3) Убедитесь, что жгут датчика заземляется на контакте 20 Ampseal и больше нигде. Это означает, что заземление TPS, охлаждающей жидкости, MAP, IAT возвращается к этому проводу. Возврат датчика заземляется внутри вашего контроллера MicroSquirt®, но если есть внешнее заземление, то на нем мгновенно возникает контур заземления. Недавно у одного человека была проблема с шумом. Мы попросили их отключить Ampseal и проверить сопротивление на штыре 20 Ampseal со стороны жгута проводов и заземления автомобиля. При отключенном Ampseal сопротивление должно быть несколько кОм или выше — если оно близко к нулю, значит, провод датчика где-то заземлен. Он отследил это ошибочное соединение с землей, и как только оно было удалено, все шумы исчезли.
Если у вас есть какие-либо вопросы или проблемы, на которые вы не можете ответить по приведенным выше ссылкам или выполнить поиск в руководстве MicroSquirt® ® :
, вы можете задать вопросы на форуме поддержки MicroSquirt®, который находится по адресу: www.
