
ᐉ Клиноременной вариатор
Передачи такого типа применяются в основном на снегоходах, мотоциклах, легковых автомобилях, причем доля автомобилей с клиноременным вариатором в мировом выпуске составляла по некоторым данным около 2% в 2003 г. Схема клиноременного вариатора, не имеющего внешней САУ, приведена на рис. б. На ведущем валу 10 установлен ведущий шкив 11, половина которого может перемещаться вдоль вала. Такой же шкив 16 установлен на ведомом валу 17. Крутящий момент между шкивами передается ремнем 15.
Рис. Схемы фрикционных бесступенчатых передач:
а — торового вариатора; б — клиноременного вариатора с внутренней САУ; 1 — вал вариатора: 2, 14, 18 — пружины; 3, 17 — ведомые валы; 4, 6 — ведущие диски; 5 — ведомый диск; 7 — нагружающее устройство; 8, 10 — ведущие валы; 9 — ролики; 11 — ведущий шкив; 12 — грузы центробежного регулятора; 13 — полость с разрежением; 15 — ремень; 16 — ведомый шкив
При разгоне автомобиля на ведущий шкив действуют силы от грузов 12 центробежного регулятора и от разрежения в полости 13, соединенной с впускным коллектором двигателя. Сумма этих сил, преодолевая силу пружин 14 и 18, сдвигает половины ведущего шкива и раздвигает половины ведомого шкива. Так происходит бесступенчатое изменение передаточного числа, причем обычно так же, как и у горового вариатора, симметрично относительно единицы.
Сумма этих сил, преодолевая силу пружин 14 и 18, сдвигает половины ведущего шкива и раздвигает половины ведомого шкива. Так происходит бесступенчатое изменение передаточного числа, причем обычно так же, как и у горового вариатора, симметрично относительно единицы.
Введение центробежного регулятора, создающего значительное усилие, сдвигающее ведущий шкив и тем самым уменьшающее передаточное число с увеличением скорости вращения ведущего шкива, превращает несаморегулируемый клиноременный вариатор в саморегулируемую (например, ГДТ) передачу. Такое решение (без внешней САУ) позволяет создать относительно простую бесступенчатую передачу, подучившую широкое применение на снегоходах (в том числе «Буран» Рыбинского завода) и мотоциклах, а также на легковых автомобилях особо малого класса фирмы «ДАФ», Голландия, а затем и «Вольво» (модель 343), Швеция.
Часто на снегоходах и мотоциклах такой клинорсмснный вариатор используется без сцепления, а функции сцепления при трогании с места выполняет ремень.![]() На режиме холостого хода двигателя ремень свободно лежит на подшипнике ведущего вала. При увеличении угловой скорости вала двигателя ремень, сжимаемый ведущим шкивом, передает тяговую силу на ведомый шкив, а значит и на ведущие колеса или гусеницу. Конечно, пробуксовывание боковых поверхностей ремня относительно вращающихся дисков ведущего шкива приводит к значительным износам и сокращению срока службы ремня.
На режиме холостого хода двигателя ремень свободно лежит на подшипнике ведущего вала. При увеличении угловой скорости вала двигателя ремень, сжимаемый ведущим шкивом, передает тяговую силу на ведомый шкив, а значит и на ведущие колеса или гусеницу. Конечно, пробуксовывание боковых поверхностей ремня относительно вращающихся дисков ведущего шкива приводит к значительным износам и сокращению срока службы ремня.
Кроме этого недостатка, не имеющегося у легковых автомобилей, использующих сцепление или ГДТ, клиноременному вариатору без внешней САУ присуще значительное недоиспользование поля передаточных чисел. В частности, без внешней САУ невозможен быстрый выход на режим максимальной мощности при максимальном передаточном числе, что приводит к более медленному разгону. В снегоходах и мотоциклах этот недостаток частично устраняется использованием специальной конструкции центробежного регулятора, обеспечивающей получение обратной прозрачности. При этом на ведущий шкив некоторое время передается крутящий момент, намного больший, чем максимальный момент двигателя.
У многих современных вариаторов оба шкива имеют гидроцилиндры и сдвигаются-раздвигаются давлением жидкости, изменяемым внешней САУ с электронным блоком.
При этом поле передаточных чисел используется в значительно более широких пределах. Так, при полной подаче топлива разгон вначале происходит при наибольшем передаточном числе клиноременного вариатора, но при приближении к максимальной частоте вращения двигателя САУ обеспечивает плавное уменьшение передаточною числа. На максимальную частоту вращения коленчатого вала двигатель выходит не при 29 км/ч, а при 80 км/ч. Это приводит к существенному снижению шумности двигателя в процессе разгона автомобиля при сохранении высокой тяговой силы, поскольку с уменьшением передаточного числа клиноременного вариатора уменьшается коэффициент учета вращающихся масс. В соответствии с современными представлениями используется также зона повышающих передач, обеспечивающих улучшение топливной экономичности автомобиля.
Рис.
Трансмиссия с клиноременным вариатором фирмы «Ниссан» (а) и металлический ремень VDT (б):
1 — гидроцилиндр перемещения ведущего шкива; 2— фрикцион переднего хода; 3 — фрикцион заднего хода; 4 — гидротрансформатор; 5 — насос САУ; 6 — гидроцилиндр перемещения ведомого шкива; 7 — двухступенчатая главная передача; 8 — дифференциал; 9 — металлические звенья; 10 — стальные многослойные ленты; 11 — поверхность контакта с конусной поверхностью шкива
На рисунке а представлена коробка передач с клиноременным вариатором фирмы «Ниссан». В этой конструкции, как и в ГМП типа ГСК, при трогании с места и движении передним ходом сначала включается фрикцион переднего хода 2, а затем при увеличении подачи топлива происходит троганис с места, причем работа буксования происходит в ГДТ. У ведущего и ведомого шкивов установлены гидроцилиндры 1 и 6 для сдвигания-раздвигания шкивов.
Наружные диаметры гидроцилиндров увеличены до наружных диаметров шкивов, что позволяет применять сравнительно невысокие давления для перемещения шкивов. Применение внешней САУ с электронным блоком (не показаны на рис. а) позволяет значительно более полно, чем в конструкциях без внешней САУ, использовать иоле передаточных чисел.
Применение внешней САУ с электронным блоком (не показаны на рис. а) позволяет значительно более полно, чем в конструкциях без внешней САУ, использовать иоле передаточных чисел.
Конструкции вариаторов с раздвигаемыми шкивами продолжают совершенствоваться, в частности, в направлении увеличения диапазона передаточных чисел. Так, например, фирма «Лук» наладила выпуск вариатора «Мультитрон и к» с гибким элементом в виде многорядной цепи фирмы «ПИВ» вместо ремня. Этот вариатор имеет КПД 88…93%, диапазон передаточных чисел — 6,0…6,2.
Ранее применялись резинокордовые ремни. Они имели трапецеидальное сечение и выполнялись зубчатыми для большей гибкости при высокой поперечной жесткости. Они работали на растяжение, передавая и силу предварительного натяжения и силу тяги, но имели низкие износостойкость и прочность. Обычно в современных автомобильных клиноременных вариаторах применяют металлический ремень фирмы «Ван Дорн Трансмишен» (VDT). Ремень состоит (рис. б) из двух многослойных металлических лент 10, на которые вплотную друг к другу установлены металлические звенья 9 особой формы. Ленты работают на растяжение, воспринимая силу предварительного натяжения, а звенья работают на сжатие, передавая силу тяги. КПД такого вариатора составляет 85…90%, диапазон передаточных чисел — 5,0…5,8.
Ленты работают на растяжение, воспринимая силу предварительного натяжения, а звенья работают на сжатие, передавая силу тяги. КПД такого вариатора составляет 85…90%, диапазон передаточных чисел — 5,0…5,8.
Кинематический и силовой анализ схемы зубчатого вариатора момента с не-симметричным дифференциалом
Библиографическое описание:Лысянский, В. А. Кинематический и силовой анализ схемы зубчатого вариатора момента с не-симметричным дифференциалом / В. А. Лысянский, С. А. Кузнецов, А. В. Ярута. — Текст : непосредственный // Актуальные вопросы технических наук : материалы II Междунар. науч. конф. (г. Пермь, февраль 2013 г.). — Т. 0. — Пермь : Меркурий, 2013. — С. 55-58. — URL: https://moluch.ru/conf/tech/archive/73/3436/ (дата обращения: 25.02.2023).
Кинематическая схема зубчатого вариатора момента с несимметричным дифференциалом представлена на рисунке 1.
Устройство состоит из дифференциального механизма, входным звеном
которого является водило 1 с сателлитами и двумя
центральными колесами 4 и 5, установленными на выходных валах 2 и 3
соответственно, один из которых соединен с водилом 6
планетарного механизма, который выполнен двухрядным, а на водиле
6 установлен с возможностью вращения блок сателлитов 7,
образованный двумя соосными сателлитами с равным числом зубьев,
взаимодействующими с двумя центральными соосными зубчатыми
колесами 8, одно из которых закреплено неподвижно, а ко второму
подвижному колесу жестко прикреплен рычаг управления 9 вариатором
[1].
Рис. 1. Кинематическая схема зубчатого вариатора момента
Вариатор работает следующим образом. Вращение от
двигателя подается на водило 1 дифференциала. Полученное водилом
движение делится между выходными валами 2 и 3 с центральными
колесами 4 и 5 соответственно. При неподвижном выходном вале 2
движение центрального колеса 5 передается на водило планетарного
механизма 6, которое вместе с блоком сателлитов 7 свободно
вращается вокруг центральных зубчатых колес 8, которые остаются
неподвижными, поскольку одно из них закреплено неподвижно,
а передаточное отношение равно бесконечности при равных числах
зубьев центральных зубчатых колес 8. При приложении управляющего
момента на рычаг управления 9 свободное движение водила 6 с блоком
сателлитов 7 затормаживается, и возникающий момент торможения на
валу водила 6 способствует возникновению крутящего момента на
выходном валу 2 вариатора, причем этот момент пропорционален
управляющему усилию.
Рассмотрим кинематические и силовые параметры вариатора представленного на рисунке 1 в зависимости от того, какое из звеньев дифференциала будет ведущим, ведомым или управляемым (рисунок 2)
Рис. 2. Варианты расположения звеньев вариатора
Для определения угловых скоростей звеньев дифференциала используем формулу Виллиса [2, 3]:
. (1)
Передаточное отношение определяется через радиусы начальных окружностей зубчатых колес или через числа их зубьев
.
Обозначим величину (знак «-» так как центральные колеса при остановленном водиле вращаются в разные стороны) через р.
Тогда зависимость между моментами на центральных колесах (5 и 4) и водила (Н) без учета потерь на трение [2]:
;
или (2)
.
Используя формулы (1) и (2) определим кинематические и силовые зависимости вариатора.
Первый вариант (рисунок 2, а)
Водило 1 (Н) — входное звено, центральное колесо 5 соединено с нагружателем (управляющее звено), центральное колесо 4 соединено с ведомым валом (выходное звено).
При угловая скорость выходного звена будет иметь максимальное значение, которое составит
.
Таким образом, угловая скорость ведомого вала 4 изменяется в пределах
.
Силовые параметры выходного звена (крутящий момент и мощность ) без учета к. п.д. дифференциала связаны соотношениями
; .
Второй вариант (рисунок 2, б)
Водило 1 (Н) — входное звено, центральное колесо 5 выходное звено центральное колесо 4 соединено с нагружателем (управляющее звено).
При угловая скорость выходного звена будет иметь максимальное значение, которое составит
.
Таким образом, угловая скорость ведомого вала 5 изменяется в пределах
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
; .
Третий вариант (рисунок 2, в)
Центральное колесо 4 — входное звено, центральное колесо 5 управляемое звено, а водило 1 (Н) выходное звено.
При угловая скорость выходного звена будет иметь максимальное значение, которое составит
.
Таким образом, угловая скорость выходного звена изменяется в пределах
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
; .
Четвертый вариант (рисунок 2, г)
Центральное колесо 4 — входное звено, центральное колесо 5 выходное звено, а водило 1 ( Н) управляемое звено.
При угловая скорость выходного звена будет иметь максимальное значение, которое составит
.
Таким образом, угловая скорость выходного звена изменяется в пределах
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
; .
Пятый вариант (рисунок 2, д)
Центральное колесо 5 — входное звено, центральное колесо 4 управляемое звено, а водило 1 (Н) выходное звено.
При угловая скорость выходного звена будет иметь максимальное значение, которое составит
.
Таким образом, угловая скорость ведомого вала 4 изменяется в пределах
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
; .
Шестой вариант (рисунок 2, е)
Центральное колесо 5 — входное звено, центральное колесо 4 выходное звено, а водило 1 (Н) управляемое звено.
При угловая скорость выходного звена будет иметь максимальное значение, которое составит
.
Таким образом, угловая скорость выходного звена изменяется в пределах
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
; .
Проведенный кинематический и силовой анализ позволяет определить оптимальное расположение входного, выходного и управляемого звеньев зубчатого вариатора момента при использовании его в составе привода технологической машины, для максимально эффективной работы исполнительного органа при выполнении технологических операций.
Литература:
Пат. № 2445531 Российская федерация МПК F16H 3/74, F16H. Вариатор момента [Текст] / Кузнецов С. Н., Владимиров А. В., Лысянский В. А., Старченко И. Е.; заявитель и правообладатель Государственное образовательное учреждение высшего профессионального образования «Южно-Российский государственный университет экономики и сервиса» (ГОУ ВПО «ЮРГУЭС») — № 2010149799/11; заявл.
 03.12.2010; опубл. 20.03.2012, Бюл.
№ 8.
03.12.2010; опубл. 20.03.2012, Бюл.
№ 8.Артоболевский И. И. Теория механизмов и машин [Текст] / И. И. Артоболевский. — М.: Наука, 1988. — 640 с.
Кирдяшев Ю. Н. Многопоточные передачи дифференциального типа [Текст] / Ю. Н. Кидряшев. — М.: машиностроение, 1981. — 231 с.
Как сделать 3-х фазную схему ЧРП
Представленная 3-х фазная схема ЧРП (, разработанная мной ) может использоваться для управления скоростью любого трехфазного коллекторного двигателя переменного тока или даже бесщеточного двигателя переменного тока. Идея была предложена г-ном Томом
Использование ЧРП
Предложенная 3-фазная схема ЧРП может универсально применяться для большинства 3-фазных двигателей переменного тока, где эффективность регулирования не слишком критична.
Его можно специально использовать для управления скоростью асинхронного двигателя с короткозамкнутым ротором в режиме разомкнутого контура и, возможно, также в режиме замкнутого контура, который будет обсуждаться в следующей части статьи.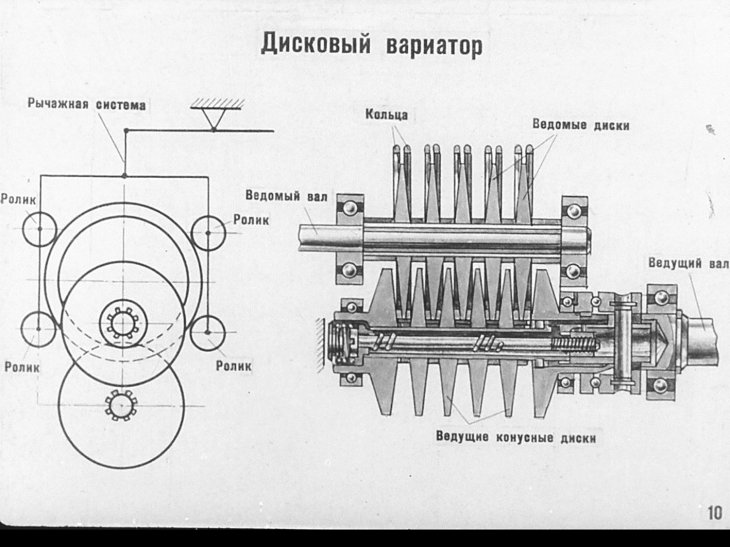
Модули, необходимые для 3-фазного инвертора
Для разработки предлагаемой схемы 3-фазного частотно-регулируемого привода или частотно-регулируемого привода необходимы следующие основные этапы схемы:
- Схема контроллера напряжения ШИМ схема драйвера
- Цепь трехфазного генератора
- Схема преобразователя напряжения в частоту для формирования параметра В/Гц.
Давайте узнаем подробности функционирования вышеперечисленных ступеней с помощью следующего пояснения:
Простую схему ШИМ-контроллера напряжения можно увидеть на диаграмме, приведенной ниже:
ШИМ-контроллер
Я уже включил и объяснил работу вышеописанного каскада ШИМ-генератора, который в основном предназначен для генерирования переменного выходного сигнала ШИМ на контакте 3. IC2 в ответ на потенциал, приложенный к контакту 5 той же IC.
Предустановка 1K, показанная на схеме, представляет собой ручку управления среднеквадратичным значением, которую можно соответствующим образом отрегулировать для получения требуемой пропорциональной величины выходного напряжения в форме ШИМ на выводе 3 IC2 для дальнейшей обработки. Это настроено для получения соответствующего выходного сигнала, который может быть эквивалентен сети 220 В или 120 В переменного тока RMS.
Это настроено для получения соответствующего выходного сигнала, который может быть эквивалентен сети 220 В или 120 В переменного тока RMS.
Схема драйвера Н-моста
На следующей диаграмме ниже показана схема драйвера трехфазного Н-моста с одной микросхемой, использующая микросхему IRS2330.
Конструкция выглядит просто, так как большая часть сложностей решается встроенной в чипы сложной схемой.
Хорошо рассчитанный 3-фазный сигнал подается на входы HIN1/2/3 и LIN1/2/3 микросхемы через каскад генератора 3-фазного сигнала.
Выходы микросхемы IRS2330 интегрированы в мостовую сеть из 6 полевых МОП-транзисторов или БТИЗ, стоки которых соответствующим образом сконфигурированы с двигателем, которым необходимо управлять.
Затворы MOSFET/IGBT на нижней стороне объединены с выводом №3 IC2 обсуждавшегося выше каскада схемы генератора ШИМ для инициирования инжекции ШИМ в мостовой каскад MOSFET. Это регулирование в конечном итоге помогает двигателю набрать желаемую скорость в соответствии с настройками (с помощью предустановки 1 k на первой диаграмме).
На следующей диаграмме мы визуализируем необходимую схему трехфазного генератора сигналов.
Настройка схемы трехфазного генератора
Трехфазный генератор построен на основе пары КМОП-чипов CD4035 и CD4009.который генерирует точно рассчитанные 3-фазные сигналы на показанных выводах.
Частота 3-х фазных сигналов зависит от входных тактовых импульсов, которые должны быть в 6 раз больше предполагаемого 3-х фазного сигнала. Это означает, что если требуемая 3-фазная частота составляет 50 Гц, входная тактовая частота должна быть 50 x 6 = 300 Гц.
Это также означает, что вышеуказанные часы могут быть изменены для изменения эффективной частоты драйвера IC, которая, в свою очередь, будет отвечать за изменение рабочей частоты двигателя.
Однако, поскольку указанное выше изменение частоты должно быть автоматическим в ответ на изменяющееся напряжение, необходим преобразователь напряжения в частоту. На следующем этапе обсуждается простая схема точного преобразователя напряжения в частоту для требуемой реализации.
Как создать постоянное отношение V/F
Как правило, в асинхронных двигателях для поддержания оптимальной эффективности скорости и крутящего момента необходимо контролировать скорость скольжения или скорость ротора, что, в свою очередь, становится возможным путем поддержания постоянное отношение В/Гц. Поскольку магнитный поток статора всегда постоянен независимо от входной частоты питания, скорость вращения ротора становится легко управляемой за счет поддержания постоянного отношения В/Гц.
В режиме разомкнутого контура это можно сделать грубо, поддерживая заранее заданное отношение В/Гц и применяя его вручную. Например, на первой диаграмме это можно сделать, соответствующим образом отрегулировав R1 и пресет 1K. R1 определяет частоту, а 1K регулирует среднеквадратичное значение выходного сигнала, поэтому, соответствующим образом настроив два параметра, мы можем вручную установить требуемое количество В/Гц.
Однако, чтобы получить относительно точное управление крутящим моментом и скоростью асинхронного двигателя, мы должны реализовать стратегию замкнутого контура, в которой данные о скорости скольжения необходимо подавать в схему обработки для автоматической регулировки отношения В/Гц, чтобы что это значение всегда остается близким к постоянному.
Реализация обратной связи с замкнутым контуром
Первую диаграмму на этой странице можно соответствующим образом изменить для проектирования автоматического регулирования В/Гц с замкнутым контуром, как показано ниже:
На приведенном выше рисунке потенциал на выводе №5 микросхемы IC2 определяет ширина SPWM, который генерируется на выводе № 3 той же микросхемы. SPWM генерируются путем сравнения выборки пульсаций сети 12 В на выводе № 5 с треугольной волной на выводе № 7 IC2, и они подаются на МОП-транзисторы на стороне низкого напряжения для управления двигателем.
Первоначально этот SPWM устанавливается на некоторый отрегулированный уровень (с использованием 1K perset), который запускает затворы IGBT нижней стороны трехфазного моста для инициирования движения ротора на заданном уровне номинальной скорости.
Как только ротор ротора начинает вращаться, подключенный тахометр с механизмом ротора вызывает пропорциональное увеличение напряжения на выводе № 5 IC2, что пропорционально приводит к расширению ШИМ, вызывая большее напряжение на катушках статора мотор. Это приводит к дальнейшему увеличению скорости вращения ротора, вызывая повышение напряжения на выводе № 5 IC2, и это продолжается до тех пор, пока эквивалентное напряжение SPWM больше не может увеличиваться, и синхронизация ротора статора не достигает устойчивого состояния.
Это приводит к дальнейшему увеличению скорости вращения ротора, вызывая повышение напряжения на выводе № 5 IC2, и это продолжается до тех пор, пока эквивалентное напряжение SPWM больше не может увеличиваться, и синхронизация ротора статора не достигает устойчивого состояния.
Вышеупомянутая процедура саморегулируется в течение всего периода эксплуатации двигателя.
Как сделать и интегрировать тахометр
Простую конструкцию тахометра можно увидеть на следующей схеме, ее можно интегрировать с роторным механизмом, чтобы частота вращения могла питать основание BC547.
Здесь данные о скорости вращения ротора собираются с датчика Холла или сети ИК-светодиодов/датчиков и передаются на базу T1.
T1 колеблется на этой частоте и активирует схему тахометра, выполненную путем соответствующей настройки моностабильной схемы IC 555.
Выходной сигнал вышеуказанного тахометра изменяется пропорционально входной частоте на базе T1.
По мере увеличения частоты напряжение на крайнем правом выходе D3 также растет, и наоборот, что помогает поддерживать отношение В/Гц на относительно постоянном уровне.
Как управлять скоростью
Скорость двигателя при постоянном V/F может быть достигнута путем изменения входной частоты на тактовом входе IC 4035. Этого можно добиться путем подачи переменной частоты от нестабильной схемы IC 555 или любой другой стандартная нестабильная схема на тактовый вход IC 4035.
Изменение частоты эффективно изменяет рабочую частоту двигателя, что соответственно снижает скорость скольжения.
Это определяется тахометром, и тахометр пропорционально снижает потенциал на выводе № 5 микросхемы IC2, что, в свою очередь, пропорционально снижает содержание SPWM в двигателе, и, следовательно, напряжение двигателя снижается, обеспечивая изменение скорости двигателя с правильное требуемое отношение V/F.
Самодельный V/F преобразователь
В приведенной выше схеме преобразователя напряжения в частоту используется микросхема IC 4060, и на ее частотно-зависимое сопротивление влияет сборка светодиодов/резонаторов для необходимых преобразований.
Узел LED/LDR запечатан внутри светонепроницаемой коробки, а LDR расположен на частотно-зависимом резисторе IC 1M.
Поскольку характеристика LDR/LDR достаточно линейна, изменяющаяся освещенность светодиода на LDR генерирует пропорционально изменяющуюся (увеличивающуюся или уменьшающуюся) частоту на выводе 3 микросхемы.
FSD или диапазон В/Гц ступени можно установить, соответствующим образом установив резистор 1 МОм или даже значение C1.
Светодиод питается от напряжения и загорается через ШИМ от первой ступени схемы ШИМ. Это означает, что по мере изменения ШИМ освещение светодиода также будет меняться, что, в свою очередь, приведет к пропорциональному увеличению или уменьшению частоты на выводе 3 IC 4060 на приведенной выше диаграмме.
Интеграция преобразователя с частотно-регулируемым приводом
Эта переменная частота от IC 4060 теперь просто должна быть интегрирована с тактовым входом 3-фазного генератора IC CD4035.
Вышеуказанные этапы являются основными составляющими для создания 3-фазной схемы частотно-регулируемого привода.
Теперь важно обсудить шину постоянного тока, необходимую для питания контроллеров двигателей с БТИЗ, и процедуры настройки всей конструкции.
ШИНА постоянного тока, подключенная к шинам H-моста IGBT, может быть получена путем выпрямления доступного 3-фазного входа сети с использованием следующей конфигурации схемы. Рельсы IGBT DC BUS подключаются к точкам, обозначенным как «нагрузка»
Для однофазного источника выпрямление может быть реализовано с использованием стандартной конфигурации сети с 4 диодными мостами.
Как настроить предлагаемую трехфазную схему частотно-регулируемого приводаЭто можно сделать в соответствии со следующими инструкциями:
После подачи напряжения звена постоянного тока на IGBT (без подключенного двигателя) отрегулируйте предустановку PWM 1k до достижения напряжение на шинах становится равным предполагаемому напряжению двигателя.
Затем отрегулируйте предустановку IC 4060 1M, чтобы настроить любой из входов IC IRS2330 на требуемый правильный уровень частоты в соответствии с заданными характеристиками двигателя.
После завершения вышеописанных процедур указанный двигатель может быть подключен и снабжен различными уровнями напряжения, параметром В/Гц и подтвержден для автоматических операций В/Гц на подключенном двигателе.
ГИДРАВЛИЧЕСКИЙ/ГИДРОСТАТИЧЕСКИЙ ВАРИАТОР СКОРОСТИ ИЛИ МЕХАНИЧЕСКИЙ ВАРИАТОР?
Перейти к основному содержанию
Катерина СпеджоринКатерина Спеджорин
Владелец компании Presso VAR-SPE Srl ГИДРАВЛИЧЕСКИЕ ВАРИАТОРЫ СКОРОСТИ
Опубликовано 10 октября 2019 г.
+ Подписаться
Различные клиенты спрашивают нас, в чем разница между гидравлическим и механическим вариатором: мы подумали создать сводную таблицу с основными характеристиками
ВАРИАТОРЫ VARSPE: принцип работы
Var-Spe Гидравлический вариатор скорости имеет главный контур, состоящий из первичного и вторичного насосов.
Оба блока размещены в одном корпусе и смонтированы на фиксированном распределительном валу.
Регулировка скорости осуществляется путем регулировки эксцентриситета первичного насоса, поэтому поток масла направляется на вторичный насос (с фиксированным эксцентриситетом). Последний, соединенный с выходным валом, приводит в движение скорость, прямо пропорциональную полученному потоку масла. Так, максимальный эксцентриситет первичного насоса соответствует максимальной скорости вращения выходного вала, меньший эксцентриситет будет соответствовать меньшей скорости вращения выходного вала.
МЕХАНИЧЕСКИЙ ВАРИАТОР: Принцип работы
Система механической трансмиссии с регулируемой скоростью основана на передаче мощности за счет трения между движущейся частью (приводимой в движение управляющей скоростью), ведущим и ведомым валами.
Два вариатора изменяют скорость двумя разными способами, но наши вариации имеют эти преимущества:
VAR-SPE Преимущества:
1. Легкое обслуживание
Легкое обслуживание
1. Легкое обслуживание0154 : полностью смазанный контур создает масляную пленку, которая ЗАЩИЩАЕТ от износа все внутренние компоненты, минимальное ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ — это замена масла, что обеспечивает ОЧЕНЬ ОЧЕНЬ ДОЛГИЙ СРОК СЛУЖБЫ гидравлического вариатора, внутренние компоненты имеют Отсутствие МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ ..БЕЗ ТРЕНИЯ
2. БЕЗОПАСНОСТЬ вариаторов Varspe: каждый ВАРИАТОР оснащен предохранительными клапанами, которые задействованы в случае блокировки машины… в основном в случае остановки клапаны пропускают масло в корпус вариатора
3. РЕГУЛЯТОР СКОРОСТИ : у нас есть очень разные регуляторы скорости: маховик, пневматический, электрический, рычажный, ЭЛЕКТРОННЫЙ. Мы можем настроить ВАРИАТОРЫ в соотв. по желанию заказчика, в зависимости от области применения, типа окружающей среды и т. д.
4. ВАРСПЭ покрывает мощность до 22 кВт (обычно механический вариатор доходит до 9,2 кВт)
5.