
Реально ли сделать парктроник своими руками? » АвтоНоватор
Этот или подобные вопросы задаются на автомобильных форумах, и не редко. Кто спрашивает? Спрашивают неугомонные мастера, которым доставляет удовольствие постоянно проводить тюнинг своего автомобиля. Если вы имеете понятие об основах электроники, умеете отличать резистор от транзистора, пользоваться паяльником, и вам это доставляет удовольствие, то сделать парктроник своими руками для вас не проблема.
Схема традиционного парктроника
Но, вначале давайте поймем суть вопроса. Парковочные устройства или парктроники являются хорошими помощниками для автовладельцев особенно в суматошно-смятых условиях городского движения и парковки. Без сомнений, при помощи парктроника намного облегчается процесс парковки. Но, не следует забывать, что парковочный радар – это не панацея, и тем более, в случае ЧП, объяснения о том, что у вас вышел из строя парктроник не помогут.
Именно поэтому к выбору парктроника, а тем более, если вы решили изготовить парктроник своими руками, нужно относиться очень и очень внимательно.
- Врезной датчик – от 2-х до 8-ми. Естественно, чем больше датчиков, тем больший захват площади.
- Индикатор расстояния: с одной шкалой, ЖК-индикатор, с двумя шкалами и т.д. Вплоть до вывода видеосигнала на лобовое стекло. Прогресс – он неумолимо движется вперед.
- Электронный блок управления всей этой системой.
Если речь идет о самом элементарном устройстве, коим и может стать ваш самодельный парктроник, то 2-3-х датчиков вполне достаточно для схемы парктроника.
Если вы собираетесь изготовить парктроник своими руками, то должны понимать, что все комплектующие для него должны быть только высокого качества. А схема парктроника собрана идеально.
Комплектующие для сборки самодельного парктроника
На примере опыта одного из «кулибиных» мы покажем, что нужно, чтобы собрать самодельный парктроник. Более подробные схемы парктроника можно найти на соответствующих радиоэлектронных ресурсах сети.
Итак, комплект самодельного парктроника:
- Контроллер Arduino Duemilanove – это и есть та самая аппаратная вычислительная платформа, по сути – мозг вашего самодельного парктроника.
- Ультразвуковые сонары (датчики) расстояния: Ultrasonic Range Finder
- Пластиковый корпус (бокс)
- Макетная плата
- Светодиод, желательно трёхцветный
- Провода, соответствующие длине прокладки
- Источник питания – АКБ 9В
Сборка самодельного парктроника
Плату контроллера устанавливаете в пластиковый корпус на силикон или клей, затем запитываете контроллер и ультразвуковой датчик. Определив, какие выводы светодиодов отвечают за какой цвет, присоединяете их к соответствующим выводам контроллера.
Определив, какие выводы светодиодов отвечают за какой цвет, присоединяете их к соответствующим выводам контроллера.
Настройку программы контроллера производите в соответствие с его инструкцией, увеличив или уменьшив сигнал посылок к датчику. Установку парктроника на автомобиль производите исходя из его конструктива. Датчики следует устанавливать с минимальной «мертвой зоной». Прежде, чем применить свой самодельный парктроник, проведите тестирование, и не одно.
Если вы уверены в своих знаниях и умении собрать парктроник своими руками, то делайте это. Если нет, то проще купить заводской парктроник, и установить его на авто самостоятельно. Безопасность автомобиля, как своего, так и чужого, дело ответственное. Взвесьте все «за» и «против».
- Автор: Андрей
- Распечатать
Оцените статью:
(3 голоса, среднее: 1 из 5)
Поделитесь с друзьями!
Adblock
detector
пошаговая инструкция, замена датчика парковки, как разобрать, заменить
Автор Денис Валентинович На чтение 5 мин
Содержание
- Причины неисправностей
- Как заменить
- Как разобрать
- Ремонт своими руками
- Как избежать поломок
По мере эксплуатации машины система парковки может выходить из строя, работать со сбоями и не справляться с основными функциями. Для устранения проблем производится ремонт парктроника.
Для устранения проблем производится ремонт парктроника.
Причины неисправностей
Существует масса негативных факторов, вызывающих повреждение датчика парковки. К ним следует отнести:
- Проблемы с проводами (короткое замыкание, потеря изоляции и другие). Любое повреждение проводки вызывает неправильную работу узла, вследствие чего он неточно измеряет расстояние до преграды, демонстрирует ложные срабатывания или вовсе перестает функционировать. Подобная неисправность появляется при ослабевании проводов или их контакте с горячими глушителями.
- Механические дефекты. Появляются в результате внешних факторов, включая контакт с влагой или грязью. Еще механическую поломку может вызвать неправильное обращение с прибором или удар тяжелым предметом.
- Повреждение мембраны. В таком случае система продолжает работать как раньше, но водитель не слышит звукового оповещения о приближении к объекту. Устраняется проблема заменой источника звука. Купить мембрану можно в любом автосервисе за доступную цену, а процесс ее установки не требует больших усилий и занимает пару минут.

- Выход из строя модуля. Неработоспособность радаров может объясняться повреждением модуля. Часто это случается при попадании жидкости внутрь конструкции.
Как заменить
Замена датчика парковки необходима в тех случаях, если деталь была выведена из строя не грязью или водой, а столкновением с камнем или другим тяжелым предметом на высокой скорости. И даже если камень обладает небольшим размером, попадая в зеркало радара, он повреждает его. В таком случае единственным решением остается замена датчиков.
При сложной поломке лучше обратиться в автомастерскую и доверить задачу опытным профессионалам. Однако у такого хода событий есть один минус. Сотрудники сервиса будут предлагать заменить вышедшую из строя деталь оригинальной моделью из США. А это повлечет за собой неоправданные затраты.
Поэтому лучше реализовать замену своими усилиями.
При выборе подходящей запчасти важно убедиться, что она соответствует размерам и параметрам парктроника.

Соблюдая несколько правил и следуя за руководством, можно быстро заменить деталь и восстановить работу системы.
Как разобрать
Чтобы разобрать датчик, необходимо знать о его конструкции и расположении. Также необходимо разбираться в основных причинах поломки и способах их устранения.
Сегодня на рынке парковочного оборудования доступно три типа парктроников:
- Первый характеризуется сложным исполнением. Он представляет собой систему из блока управления и проводов, соединяющих все узлы воедино.
- Второй тип оснащен аналогичными деталями, но в нем отсутствуют провода.
- В третьем типе задействованы не классические датчики, а металлизированная лента. Такие модели отличаются высокой надежностью и эффективностью работы, т.к. у них практически нет «мертвых зон». Независимо от расположения препятствия, система сможет оповестить водителя об опасности задолго до приближения. Подобные приборы фиксируются на внутренней стороне бампера, что защищает их от негативных факторов и случайных поломок.

Из-за простоты конструкции сложности в разборе датчика отсутствуют. Но перед началом работы лучше проконсультироваться с товарищем, который уже демонтировал и поменял деталь.
Изначально разбираем бампер и отсоединяем клеммы с проводами от старого радара. Если вместе с ним присутствовали провода, их нужно отсоединить от блока управления. Иногда приходится осуществлять демонтаж заднего бампера.
Ремонт своими руками
Существует несколько ситуаций, в которых необходим ремонт парктроников. Пошаговая инструкция по восстановлению детали зависит от причины и характера поломки.
- Если после включения заднего хода система не подает сигналов, необходимо проверить, подключена ли она к источнику питания. Следующая причина может заключаться в неправильном монтаже проводки. Для устранения проблемы следует попробовать восстановить схему подключения ЭБУ и отремонтировать цепь питания. Еще понадобится проверка заземления блока.
- Если точность отображения данных снижается или парковочный радар не вовремя определяет дистанцию до ближайшей преграды, возможно, он загрязнен.
 Чтобы предотвратить столкновение с инородным объектом, необходимо немедленно очистить деталь от пыли, грязи и воды.
Чтобы предотвратить столкновение с инородным объектом, необходимо немедленно очистить деталь от пыли, грязи и воды. - При отсутствии следов загрязнений, поврежденной проводки или других признаков, но частых ложных срабатываниях датчика, необходимо проверить его настройки. Нередко производители выставляют высокую чувствительность, из-за которой прибор реагирует на малейшие объекты.
- К распространенным типам поломок относят неспособность датчика определять помеху. В таких случаях ремонт начинается с проверки параметров и чистки радара от грязи. Порой устройство остается бездейственным по причине попадания сигнала в «мертвую зону». Для решения проблемы понадобится перестроение схемы или установка дополнительных узлов.
- Если в автомобиле задействован парктроник с металлизированной лентой, с ним выполняются аналогичные манипуляции. При отсутствии сигнала или частых ложных срабатываниях, достаточно оценить внешнее состояние устройства и убедиться, что оно не загрязнено. В противном случае нужно будет выполнить чистку поверхности от пыли, грязи или следов жидкости.

Если ремонт прибора своими руками оказывается слишком сложным, целесообразно отказаться от самостоятельного выполнения и обратиться к специалистам за помощью. Для жителей больших городов, таких как Москва, не будет проблемой найти ближайший сервис. Но для представителей отдаленных населенных пунктов обращение в автомастерскую часто обходится дорого. Поэтому возможность самостоятельно отремонтировать парковочный радар — хороший способ сократить расходы и вернуть системе прежнюю функциональность.
Как избежать поломок
В первую очередь нужно помнить о периодическом тщательном осмотре рабочих узлов и их очистке от загрязнений. При появлении следов грязи на поверхности датчиков нужно незамедлительно удалить их. Точно так же придется сделать с влагой.
Точно так же придется сделать с влагой.
Если речь идет о ленточном парктронике, необходимо уделить внимание не только внешним частям, но и внутренним. Нередко грязь скапливается под корпусом.
Еще одним уязвимым местом является блок управления. Время от времени его нужно чистить, соблюдая осторожность, чтобы не повредить важные узлы и рабочие элементы.
Ключевым залогом долгой и бесперебойной работы парковочного радара является правильный монтаж и подключение соединений. Однако на одной установке все не заканчивается. Понадобится качественная настройка режимов работы, чтобы система вовремя реагировала на препятствия, а вероятность ложных срабатываний была минимальной.
Учитывая эти рекомендации, можно продлить срок службы датчика, обеспечив себе комфортную и безопасную езду на автомобиле.
- Передние парктроники
- Установка магнитолы Nissan X Trail
- Ремонт видеорегистратора своими руками
- Полироль для пластика в салоне автомобиля лучший
Как построить ультразвуковой датчик парковки в гараже Tesla
Авторы: Эта история была первоначально опубликована на ch00ftech и перепечатана с письменного разрешения владельца сайта. Все медиа предоставлены ch00ftech.
История и мотивацияНеудивительно, что я очень-очень хочу Tesla. Или на самом деле любой электромобиль, если уж на то пошло. Единственная проблема на данный момент заключается в том, что моя ежедневная поездка на работу занимает у меня 20 минут пешком в одну сторону, поэтому я действительно не могу оправдать покупку автомобиля, который проведет большую часть своей жизни припаркованным в гараже или в пробке Сиэтла.
Вот почему мне приходится жить за счет других людей, и почему я очень обрадовался, когда узнал, что мой папа внес залог за новую модель S.
Это хорошо скрывает, но модель S — массивная машина длиной 196 дюймов и весом более 4700 фунтов. Мой папа изначально планировал припарковать машину на подъездной дорожке, но когда пришло время установить зарядный порт, он вместо этого выбрал гараж. Единственная проблема заключалась в том, что в его гараже было всего около шести дюймов свободного пространства между передней и задней частями автомобиля.
Единственная проблема заключалась в том, что в его гараже было всего около шести дюймов свободного пространства между передней и задней частями автомобиля.
Эта затруднительная ситуация натолкнула меня на несколько отличных идей для подарков. С приближением праздников и всеми другими проектами, которые я хотел закончить, прежде чем отправиться домой, я сначала быстро поискал на Amazon ультразвуковые датчики парковки. К сожалению, большинство из них «достигают дна» на довольно разумном уровне. Я не мог найти ни одного, который бы упал до диапазона от двух до трех дюймов.
Итак, я добавил еще один проект в свой список и принялся за работу!
ДатчикПервым шагом было приобретение ультразвукового датчика. Так получилось, что у меня был один из них под рукой:
Несколько лет назад я приобрел один из них, пытаясь создать ультразвуковую систему раннего предупреждения о столкновениях для пользователей смартфонов, которые слишком поглощены своей лентой в Твиттере, чтобы следить за тем, куда они идут. Этот проект никуда не продвинулся…
Этот проект никуда не продвинулся…
Датчик PING))) работает как большинство ультразвуковых датчиков, производя высокочастотный звук и ожидая, когда он отскочит от чего-то и вернется. Взаимодействие с ним состоит в подаче электрического импульса на сигнальную линию, после чего он создаст одну прямоугольную волну, ширина которой примерно соответствует продолжительности между передачей и приемом звука.
Датчик PING))) очень прост в использовании, но его форм-фактор не подходил для чего-то, что я в конечном итоге хотел поместить в чехол для телефона. Я также чувствовал, что должен создать его с нуля, учитывая, что я веду блог о том, как я делаю вещи.
Мне никогда не удавалось построить его с нуля, но я зашел достаточно далеко, чтобы заказать несколько преобразователей на 40 кГц:
и начать умеренную разборку датчика:
Когда дело дошло до изготовления датчика парковки для мой папа всего за несколько недель, у меня не было достаточно времени, чтобы выполнить свою первоначальную цель построить его с нуля, поэтому я в конечном итоге использовал PING))).
Тем не менее, есть еще некоторые интересные вещи, которые я узнал из разборки, независимо от того, насколько неполной она была, поэтому я подумал, что мне потребуется некоторое время, чтобы интерпретировать свои заметки двухлетней давности и поделиться некоторыми из этих знаний с вами. .
РазборкаНа момент написания этой статьи у меня даже не было под рукой ни одной из этих вещей, поэтому приносим извинения, если эта разборка в основном неполная. Плата содержит операционный усилитель с несколькими затворами, инвертор зарядового насоса, триггер и микроконтроллер. Вы можете разобрать номера деталей триггера и операционного усилителя на изображении выше, но я не записал остальные.
ПЕРЕДАЧА Первый шаг – управление преобразователем на частоте 40 кГц. Все аудиосхемы на плате используют большой операционный усилитель с несколькими затворами (TLC274C), который питается от шины 5 В и шины -5 В, генерируемой инвертором подкачки заряда.
(В этом схематическом наброске я использую «RA_» или «RB_» для описания контактов GPIO, идущих к микроконтроллеру) операционный усилитель, в то время как неинвертирующий вход плавает на уровне около 2,4 В. Это создает прямоугольную волну 10Vpp, которая управляет датчиком.
Резисторы номиналом 3,9 кОм создают напряжение постоянного тока полурельса (2,4 В), но я до сих пор не уверен, при чем здесь RB1 и остальные пассивные элементы. Возможно, они служат какой-то цели приглушения преобразователя, но это не ясно.
ПРИЕМ И ФИЛЬТРАЦИЯНа приемной стороне выход приемного преобразователя проходит через блокировочный диод постоянного тока, а затем через инвертирующий усилитель с коэффициентом усиления 100. Затем он проходит через фильтр верхних частот с неизвестной отсечкой. частота (емкость конденсатора не измерял), но я предполагаю, что она отсекает все в слышимом диапазоне, а затем и некоторые другие.
Следующий неинвертирующий усилитель, но он имеет программно регулируемое усиление. Если RB3 и RB4 оставить плавающими, коэффициент усиления составит 5,8, но при подсоединении обоих контактов к GND коэффициент усиления может возрасти до 49. Я предполагаю, что любой микроконтроллер, который они использовали, имеет достойную устойчивость к отрицательным напряжениям контакты GPIO, так как этот сигнал смещен на землю и потенциально может колебаться довольно далеко в отрицательном направлении.
Если RB3 и RB4 оставить плавающими, коэффициент усиления составит 5,8, но при подсоединении обоих контактов к GND коэффициент усиления может возрасти до 49. Я предполагаю, что любой микроконтроллер, который они использовали, имеет достойную устойчивость к отрицательным напряжениям контакты GPIO, так как этот сигнал смещен на землю и потенциально может колебаться довольно далеко в отрицательном направлении.
Следующая часть схемы показалась мне особенно умной. При попытке извлечь сигнал из шума часто важно иметь уровень «шумоподавления». Это минимальная амплитуда, необходимая для того, чтобы сигнал считался сигналом, а не просто шумом. В идеале этот порог шумоподавления должен быть установлен как можно ближе к предполагаемому уровню сигнала, чтобы отсечь наибольшую часть шума.
Этого легко добиться с помощью фиксированного порога, но проблема заключается в том, чтобы выяснить, где его установить. Когда ультразвуковой сигнал уходит от датчика PING))), он распространяется, что означает, что сигнал, отраженный от удаленных объектов, будет намного слабее, чем сигнал, отраженный от близлежащих объектов. Вы можете установить порог ожидаемой амплитуды самого удаленного объекта, который вы ожидаете увидеть, но тогда вы открываете ворота для большего количества ложных срабатываний, генерируемых шумом.
Вы можете установить порог ожидаемой амплитуды самого удаленного объекта, который вы ожидаете увидеть, но тогда вы открываете ворота для большего количества ложных срабатываний, генерируемых шумом.
Датчик PING))) решает эту проблему, имея регулируемый порог, который снижается, пока сигнал находится в эфире. После фильтрации, как показано выше, сигнал поступает на инвертирующий вход другого вентиля операционного усилителя, который настроен как простой компаратор:
Само по себе это не очень интересно, но RB5 и RB6 делают кое-что интересное. когда устройство активировано:
При первом выпуске сигнала RB5 и RB6 повышают напряжение на конденсаторе. Затем, в течение следующих нескольких миллисекунд, серия импульсов с открытым стоком на RB5 снижает напряжение на этой крышке и снижает пороговое значение, поступающее на компаратор/операционный усилитель. Это эффективно позволяет процессору выполнять некоторую обработку аналоговых сигналов без использования медленных АЦП или ЦАП. Я предполагаю, что настройка этого процесса для правильной работы потребовала множества проб и ошибок, которые могли бы объяснить некоторые посторонние выводы и пассивы процессора, которые, похоже, мало что делают в конечном приложении.
Я предполагаю, что настройка этого процесса для правильной работы потребовала множества проб и ошибок, которые могли бы объяснить некоторые посторонние выводы и пассивы процессора, которые, похоже, мало что делают в конечном приложении.
К этому моменту мы надеемся получить прямоугольное воспроизведение исходного сигнала частотой 40 кГц, поступающего с выхода компаратора. В качестве последней проверки PING))) ищет два последовательных фронта сигнала, отстоящих друг от друга примерно на 1/40 000 секунды. Это достигается с помощью пары триггеров.
Мои наброски этой схемы немного грубоваты, но сразу же следует отметить некоторые интересные вещи.
Во-первых, после прохождения через резистор 1k сигнал соединяется с каким-то неизвестным трехконтактным устройством SOT23. Странно, что подключены только две из трех клемм этого устройства (одна из остальных клемм подключается к земле). Учитывая, что компаратор питается от положительной и отрицательной шины, я предполагаю, что это устройство действует как защитный диод, который не позволяет сигналу уйти слишком далеко под землю. Таким образом, он не взорвет триггер. Резистор 1k удерживает ток в разумных пределах.
Таким образом, он не взорвет триггер. Резистор 1k удерживает ток в разумных пределах.
Затем сигнал проходит к контактам синхронизации двух триггеров, содержащихся в HEF4013b. В этой конфигурации, когда сигнал становится высоким, вход каждого триггера (1D, 2D) будет передаваться на выход (1Q, 2Q). Поскольку 1D подключен непосредственно к положительной шине, 1Q станет высоким вместе с первым нарастающим фронтом сигнала.
Выход первого триггера (1Q) соединен со входом второго (2D), что означает, что выход второго триггера также должен стать высоким со вторым фронтом тактового сигнала. Но в этом есть хитрость. Выход первого триггера также подключен к простому RC-фильтру нижних частот, который управляет 1CD, битом очистки первого триггера. Результирующие формы волны выглядят следующим образом:
В этой конфигурации 2Q (и, следовательно, RC6 на процессоре) станет высоким со вторым импульсом сигнала (1CP), но если второй импульс не придет достаточно быстро, в конце концов конденсатор на 1CD поднимется. достаточно высоким, чтобы вызвать сброс первого триггера и начать процесс заново.
С этими фильтрами единственный способ получить тактовый фронт на выводе RC6 — это иметь два последовательных тактовых фронта сигнала с частотой не менее 40 кГц и соответствующей амплитудой. Все остальное будет сбрасываться бесконечно, пока процессор в конце концов не сдастся и не отправит еще один пинг.
Когда я изначально собирался создать свой собственный датчик, я думал, что мне придется много работать с DSP, но я быстро понял, насколько сложно обрабатывать звук 40 кГц, когда большинство АЦП созданы для аудиоприложений и поэтому в первую очередь предназначены для слышимого диапазона частот. Я подумал, что это довольно умно, как PING))) использует несколько простых аналоговых схем для некоторой элементарной обработки звука без использования дорогостоящего высокоскоростного АЦП.
Схемы После того, как я решил использовать датчик PING))) точно так, как указано, мне нужно было построить остальную часть моей схемы. Я хотел построить что-то прочное, что можно было бы красиво закрепить на стене папиного гаража. Подумав, что датчик, вероятно, нужно будет разместить внизу бампера автомобиля, я выбрал двухкомпонентную конструкцию, состоящую из небольшого датчика и большого видимого дисплея, который можно было бы установить на уровне глаз.
Я хотел построить что-то прочное, что можно было бы красиво закрепить на стене папиного гаража. Подумав, что датчик, вероятно, нужно будет разместить внизу бампера автомобиля, я выбрал двухкомпонентную конструкцию, состоящую из небольшого датчика и большого видимого дисплея, который можно было бы установить на уровне глаз.
Я решил использовать USB для питания и Ethernet для соединения двух частей системы. Это обеспечит максимальный уровень гибкости при монтаже.
Схема датчика выглядит следующим образом:
Здесь особо не о чем говорить. У датчика просто есть разъемы для USB и датчик PING с ATTiny24, управляющим всем шоу. К разъему Ethernet идут шины 5V и GND вместе с шиной I2C. I2C не предназначен для передачи на большие расстояния, но у меня не было настроения настраивать подходящий интерфейс RS485. Я решил снизить его импеданс, используя несколько действительно сильных подтягиваний, и скрестил пальцы, чтобы он не зависал от слишком сильного шума от шин питания.
Когда я отправлялся в путь, моей главной заботой было то, что ультразвуковой датчик не сможет обнаружить автомобиль, когда он подъедет очень близко, поэтому я также включил соединения для инфракрасного датчика приближения, которые я потенциально мог бы использовать.
На другой стороне кабеля Ethernet находится драйвер дисплея, состоящий из одного TLC59208F. Этот драйвер светодиодов, управляемый I2C, может управлять 8 светодиодами с 8-битной яркостью, используя выходы с открытым стоком, обеспечивающие 256 различных уровней яркости на канал. Это достигается с помощью 97 кГц PWM, который он поддерживает полностью самостоятельно. Это значительно упростило работу моего процессора и предоставило большую гибкость, если я захочу забавную пульсирующую светодиодную анимацию.
Из-за размера моего знака я решил не припаивать светодиоды непосредственно к печатной плате, чтобы сократить количество требуемой печатной платы. Вместо этого я просто подключил их по воздуху между шиной 5 В на TP9 и соответствующим контактом стока последовательно с токоограничивающим резистором. Для упрощения конструкции я мог бы использовать TLC59.108, который включает в себя элементы ограничения тока, но в то время я не был уверен, хочу ли я делать два светодиода параллельно для каждого канала, и для этого потребовались бы два отдельных ограничителя тока, как вы, возможно, уже знаете.
Для упрощения конструкции я мог бы использовать TLC59.108, который включает в себя элементы ограничения тока, но в то время я не был уверен, хочу ли я делать два светодиода параллельно для каждого канала, и для этого потребовались бы два отдельных ограничителя тока, как вы, возможно, уже знаете.
Несмотря на то, что гистограммный дисплей должен был стать украшением проекта, я все же хотел, чтобы комплект датчиков выглядел немного более правдоподобно, чем некоторые из моих более случайных проектов. По этой причине я присмотрелся к корпусу, который имел некоторые монтажные приспособления, облегчающие его крепление к стене гаража. Я остановился на 1591LFL от Hammond:
Хотя в этом корпусе не было обычного контура печатной платы, который я ожидал от Hammond, в нем было достаточно деталей, чтобы я мог смоделировать контур печатной платы и быстро создать 3D-модель в ViaCAD. чтобы убедиться, что все поместится:
Здесь вы можете разглядеть датчики PING))) датчик торчит спереди вместе с портом USB с левой стороны и портом Ethernet, выходящим сверху. Я также смоделировал ИК-датчик приближения посередине. Я подумал, что мне придется вырезать для него маленькое окошко, но в конечном итоге мне не понадобился дополнительный датчик.
Я также смоделировал ИК-датчик приближения посередине. Я подумал, что мне придется вырезать для него маленькое окошко, но в конечном итоге мне не понадобился дополнительный датчик.
Все вместе, печатная плата выглядела так:
А при установке на заднюю панель 1591LFL рекомендованными винтами 1593ATS (продаются отдельно) выглядело так:
ПИНГ))) сама плата установлена с 6-миллиметровыми стойками, и я заменил прилагаемый прямоугольный разъем 0,1 дюйма прямым разъемом, чтобы он мог подключаться к ответной розетке, припаянной к моей печатной плате.
Следующей проблемой была установка крышки. Для этого потребуется вырезать несколько отверстий вокруг датчиков и портов.
Это была работа для фрезерного станка с ЧПУ.
Привести два компонента в соответствие друг с другом — это то, что я пытался несколько раз с умеренными результатами. Обычно я переоцениваю величину зазора, необходимого вокруг деталей, чтобы они могли поместиться. На этот раз я решил по-настоящему подтолкнуть его и оставить себе всего четверть миллиметра пространства по краям.
Около 90% любой работы с ЧПУ — это правильная фиксация, поэтому я использовал параллели и тиски, чтобы удерживать коробку на боку для вырезов портов USB и Ethernet:
Это были довольно прямые сокращения. Я использовал кромкообрезной станок, чтобы обнулить головку ЧПУ по краям коробки, и просто вырезал прямоугольник в соответствующем месте с помощью концевой фрезы 1/16″.
Отверстия для преобразователя на самом деле не отличались, но из-за допусков стека PING))) и моей монтажной паранойи, что я что-нибудь напортачу, я сделал предварительное выравнивание с нижней половиной корпуса:
и просто снял печатную плату и прижал верхнюю часть коробки вниз для фактического разреза.
Результаты были… действительно потрясающими:
У меня никогда в жизни не получалось что-то, что бы так хорошо сочеталось друг с другом. Вокруг преобразователей есть едва заметный зазор, и даже есть небольшое трение по бокам портов, когда вы опускаете верхнюю часть вниз. Это действительно кажется твердым.
Это действительно кажется твердым.
Теперь о приятном.
Механическая сборка — дисплейХотя сборные корпуса действительно просты в использовании, они, как правило, становятся дорогими, когда они становятся действительно большими. Я хотел, чтобы мой сенсорный дисплей был очень большим и видимым, поэтому я решил построить его с нуля, используя листы акрила. Это также дало мне возможность получить красивую глянцевую черную отделку, подходящую к машине моего отца.
Я быстро набросал примерный проект:
Определившись с некоторыми произвольными размерами, я отправился на makercase.com. На этом сайте очень легко получить планы изготовления коробок из материалов, вырезанных лазером.
После добавления некоторых функций в дизайн makercase у меня было следующее:
Пластины в правом нижнем углу предназначены для размещения между полосами с подсветкой, чтобы держать их разделенными, и у них даже есть вырез для печатной платы драйвера и провода идущие к светодиодам. Я также сделал зазор 1/8 дюйма между разделителями и передней панелью, чтобы добавить еще один кусок акрила для рассеивания света.
Я также сделал зазор 1/8 дюйма между разделителями и передней панелью, чтобы добавить еще один кусок акрила для рассеивания света.
Меня немного беспокоили сепараторы, потому что я не знал, какой зазор нужно оставить в их ответных отверстиях, чтобы они хорошо подходили друг к другу. Я снял некоторые размеры с планов корпуса производителя и подсчитал, что мне нужен зазор около 0,001 дюйма с обоих концов слотов. Я не уверен, что этот зазор имеет решающее значение, поскольку лазер имеет тенденцию расплавлять акрил и вызывать небольшое отступание краев, но это, безусловно, не повредит.
Неплохо!
В моем первоначальном дизайне был полный логотип Tesla с текстом и всем остальным, но мелкие детали текста оказались слишком тонкими для лазерного резака, который расплавил и деформировал их.
Акрил имеет защитный синий слой, который необходимо снять. Я ждал до последней минуты, чтобы снять его, и забыл сделать снимок, но вы можете использовать видео вверху и свое воображение, чтобы понять, как это выглядело.
Далее была установка всей электроники внутри:
Я аккуратно просверлил несколько отверстий в каждом из разделителей и использовал их для поддержки светодиодов. Вся работа с проводкой была довольно простой, хотя закрыть коробку, не застряв провода между разделителями и задней частью, было настоящей головной болью. Если бы у меня было больше времени, я бы потратил часть его на упрощение проводки, потому что это серьезно занимало 10 минут каждый раз, когда я хотел открыть коробку.
Вот и все! На самом деле вся коробка довольно плотно прилегала друг к другу, поэтому я не стал ее склеивать, пока не был на 100 % уверен, что она работает. Когда пришло время, несколько осторожных капель цианоакрилата (суперклея) сделали свое дело.
Прошивка Я специально выбрал ATTiny24 для этой конструкции из-за его встроенного порта I2C (или, как все, кроме Phillips, любят называть его «TWI») порта. Я использовал I2C раньше, поэтому я с нетерпением ждал возможности использовать порт для программирования и управления драйвером светодиода. После того, как я приложил все усилия для сборки печатной платы, я был немного напуган, обнаружив, что не было команд для управления портом I2C!
После того, как я приложил все усилия для сборки печатной платы, я был немного напуган, обнаружив, что не было команд для управления портом I2C!
Поиск в Google показал, что ATTiny24 включает в себя биты канального уровня, необходимые для работы I2C, но элементы уровня протокола, такие как ACK и NAK, должны обрабатываться прошивкой. Не собираясь писать свой собственный драйвер I2C с нуля, я немного погуглил и наткнулся на драйвер, предоставленный Atmel (он находится на этой странице под AVR310). Потребовалось несколько настроек, чтобы заставить его работать на ATTiny24 (пример был написан для другого устройства), но за короткое время мой дисплей заработал:
Далее прогнал датчик PING))). Чтобы получить наилучший уровень точности при критическом измерении времени прохождения, я использовал прерывание для запуска и остановки Timer1.
Вместо того, чтобы вычислять правильное время прохождения сигнала, я просто играл с 8 пороговыми значениями для 8 полос дисплея, пока не нашел то, что казалось мне правильным. Я хотел, чтобы дисплей работал с более высоким уровнем точности, когда автомобиль приближался к критическим последним дюймам, поэтому я поместил эти пороги ближе друг к другу. Окончательный порог расширил пределы того, что может сделать PING))), и установился примерно на 1,5 дюйма.
Я хотел, чтобы дисплей работал с более высоким уровнем точности, когда автомобиль приближался к критическим последним дюймам, поэтому я поместил эти пороги ближе друг к другу. Окончательный порог расширил пределы того, что может сделать PING))), и установился примерно на 1,5 дюйма.
Когда датчик активен, он запрограммирован на измерение примерно 10 раз в секунду. Когда горят все 8 полосок (автомобиль припаркован) или не горят ни одной полоски (автомобиль отсутствует) в течение примерно 15 секунд подряд, дисплей отключается, и датчик переходит в режим ожидания, где он выполняет измерение только каждые несколько секунд.
Больше о прошивке сказать особо нечего. Я приглашаю вас скачать файлы проекта, если вы хотите узнать больше (хотя удачи вам в навигации по комментариям. Я написал все примерно за час).
Результаты и настройкиМой папа был в восторге, как только я показал ему датчик. Он уже прикрепил к стене резиновый коврик и установил один из них:
Но ультразвуковое решение имело уровень сексуальности, который действительно хорошо сочетался с автомобилем.
Несмотря на то, что мой датчик мог приблизить машину намного ближе, чем стандартные варианты, я все равно беспокоился, что я был недостаточно близко. Оказывается, у меня на самом деле была обратная проблема. Датчик позволял машине немного разгоняться слишком близко ! Благодаря полностью электрическому приводу Tesla имеет удивительно точное управление на низких скоростях, но даже парковать автомобиль изо дня в день в пределах двух дюймов от цели под страхом царапины на краске — это слишком много. Видео выше было снято в таких условиях, и вы можете увидеть небольшое опасение на последних нескольких дюймах.
Я имею в виду, это чертовски близко:
Итак, я перепрограммировал датчик, чтобы примерно удвоить целевое расстояние, и все было хорошо. Буква «Т» ярко светилась, и в машине по-прежнему оставалось достаточно места с каждой стороны, чтобы поместиться в гараже. Любопытно, что простое удвоение порогового значения не удвоило целевое расстояние. Даже с моим решением, основанным на прерываниях, при измерении в 300 мкс или около того все еще достаточно накладных расходов процессора, так что переход с 1,5″ на 3″ потребовал изменения всего лишь с 25 до 29.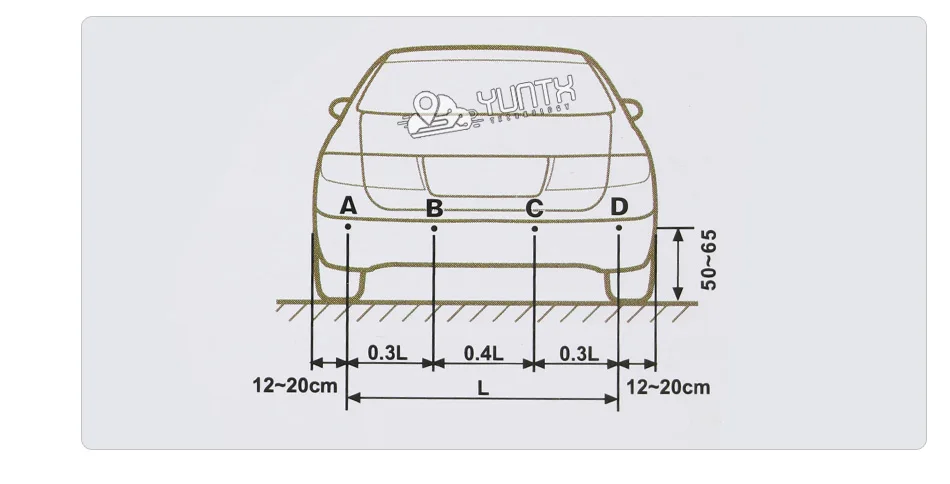 ATU (произвольные единицы времени). Я так и не понял, откуда взялось это смещение. Мой микроконтроллер работал только на частоте 1 МГц, но этого должно быть достаточно, чтобы обслуживать подпрограмму менее чем за 300 мкс. Я оставлю это в качестве упражнения для читателя.
ATU (произвольные единицы времени). Я так и не понял, откуда взялось это смещение. Мой микроконтроллер работал только на частоте 1 МГц, но этого должно быть достаточно, чтобы обслуживать подпрограмму менее чем за 300 мкс. Я оставлю это в качестве упражнения для читателя.
Итак, это был освежающе безотказный проект ch00ftech. Я в ударе в этом году! Тем не менее, я научился делать корпуса для проектов с помощью лазерного резака, а также получил хороший опыт в выполнении точных разрезов на моем ЧПУ. Кроме того, если я когда-нибудь захочу сделать этот детектор столкновений с телефоном, у меня есть хорошая фора!
Изображение бонусной зарядки:
Загрузите файлы для этого проекта здесь: Parking Sensor v1.0
Кредиты: Эта история была первоначально опубликована на ch00ftech
6 — 2.0 Обзор цен
Primer Contents
2.
 0 Обзор ценообразования
0 Обзор ценообразованияFHWA и местные органы власти рассматривают возможность использования рыночных сил путем установления цен на транспортные ресурсы для уменьшения заторов. Ценообразование, если оно установлено должным образом, достигает трех важных целей:
- Он может распределять скудные транспортные ресурсы таким образом, чтобы уменьшить заторы и обеспечить большую эффективность всей транспортной системы;
- Сокращает потенциально искажающие рынок субсидии, вызвавшие чрезмерные автомобильные поездки; и
- Это создает поток доходов, который можно инвестировать в улучшение доступа, что, в свою очередь, может снизить спрос на парковку (и вождение).
Ценообразование на парковку может быть мощным инструментом, особенно при использовании в сочетании с другими стратегиями управления спросом на поездки, чтобы повлиять на решения путешественников о том, следует ли ехать в одиночку, использовать совместное использование автомобилей, использовать общественный транспорт или использовать немоторизованные способы передвижения.
В этом разделе учебника обсуждаются два основных подхода к ценообразованию на парковку: 1) бесплатное и фиксированное ценообразование и 2) ценообразование на основе результатов. В рамках ценообразования, основанного на результатах, есть две основные стратегии: переменные цены и повышающиеся цены. Эти подходы могут использоваться городами для более эффективного управления парковочными местами, одновременно улучшая впечатления от поездок тех, кто продолжает выбирать автомобиль. В зависимости от того, как инвестируются доходы от парковки, стратегия парковки может в более широком смысле улучшить доступ к району, где желание ездить и парковаться в настоящее время превышает пропускную способность дорог и/или количество парковочных мест. 1
2.1 Бесплатная и фиксированная парковка
Города владеют огромным количеством недвижимости, которая включает в себя полосу отчуждения (ПО). В то время как ценность полосы отвода как актива подразумевается сборами за разрешения на использование, начиная от вечеринок и строительства и заканчивая неавтомобильным хранением, в частности, большинство городов разрешают жителям и посетителям бесплатно хранить свои автомобили на большей части полосы отвода. В некоторых случаях, как правило, в деловых районах, муниципалитеты взимают номинальную плату за парковочные счетчики. Потому что машины припаркованы около 96 процентов времени, и поскольку оценки количества парковочных мест на автомобиль варьируются от трех до пяти, 194 миллиона зарегистрированных транспортных средств в Соединенных Штатах занимают от 5 200 до 8 700 квадратных миль парковочных мест. Земля, отведенная под парковку в Соединенных Штатах, могла бы заполнить территорию размером от Коннектикута до Нью-Джерси — ценный актив, который недоиспользуется.
В то время как ценность полосы отвода как актива подразумевается сборами за разрешения на использование, начиная от вечеринок и строительства и заканчивая неавтомобильным хранением, в частности, большинство городов разрешают жителям и посетителям бесплатно хранить свои автомобили на большей части полосы отвода. В некоторых случаях, как правило, в деловых районах, муниципалитеты взимают номинальную плату за парковочные счетчики. Потому что машины припаркованы около 96 процентов времени, и поскольку оценки количества парковочных мест на автомобиль варьируются от трех до пяти, 194 миллиона зарегистрированных транспортных средств в Соединенных Штатах занимают от 5 200 до 8 700 квадратных миль парковочных мест. Земля, отведенная под парковку в Соединенных Штатах, могла бы заполнить территорию размером от Коннектикута до Нью-Джерси — ценный актив, который недоиспользуется.
Как отмечалось во введении, первые парковочные счетчики были установлены в Оклахома-Сити в 1935 году. Исследования, предшествовавшие установке этих счетчиков, показали, что автомобили, припаркованные на торговых улицах, в основном принадлежали местным торговцам и их служащим. Клиенты, которые начали владеть автомобилями по растущим ценам, были вынуждены кружить вокруг в надежде, что освободится место для парковки. Эти водители способствовали возникновению зарождающихся, но быстро растущих проблем с заторами в центре города. Гражданские лидеры осознали, что, сдавая тротуар в аренду, а не отдавая его, они могут изменить динамику. Счетчики сначала были установлены только на одной стороне каждой улицы. Утром, когда прибыли рабочие и торговцы, свободные места быстро заполнялись. К 10:00, когда покупатели пришли в центр города, парковочные места со счетчиками составляли большую часть доступной парковки. По мере того, как клиенты завершали свои дела и уходили, парковочные места использовались более поздними клиентами, которые также платили за использование парковочных мест. По некоторым данным, торговцы на свободной стороне также начали требовать счетчики на своей стороне (Популярная механика, 19).35). Стратегия ценообразования была очень эффективной; вместо того, чтобы все места были заняты парковщиками в течение всего дня, достаточная текучесть позволила многим пользователям получить доступ к этой области.
Клиенты, которые начали владеть автомобилями по растущим ценам, были вынуждены кружить вокруг в надежде, что освободится место для парковки. Эти водители способствовали возникновению зарождающихся, но быстро растущих проблем с заторами в центре города. Гражданские лидеры осознали, что, сдавая тротуар в аренду, а не отдавая его, они могут изменить динамику. Счетчики сначала были установлены только на одной стороне каждой улицы. Утром, когда прибыли рабочие и торговцы, свободные места быстро заполнялись. К 10:00, когда покупатели пришли в центр города, парковочные места со счетчиками составляли большую часть доступной парковки. По мере того, как клиенты завершали свои дела и уходили, парковочные места использовались более поздними клиентами, которые также платили за использование парковочных мест. По некоторым данным, торговцы на свободной стороне также начали требовать счетчики на своей стороне (Популярная механика, 19).35). Стратегия ценообразования была очень эффективной; вместо того, чтобы все места были заняты парковщиками в течение всего дня, достаточная текучесть позволила многим пользователям получить доступ к этой области. Вскоре другие города переняли этот подход к нормированию бордюра. Парковщики, работающие весь день, прибегали к поиску мест в немного более отдаленных районах или оставляли свои машины дома, позволяя местам с высоким спросом неоднократно переворачиваться в течение дня. Результат был хорош для бизнеса и хорош для уличного выступления.
Вскоре другие города переняли этот подход к нормированию бордюра. Парковщики, работающие весь день, прибегали к поиску мест в немного более отдаленных районах или оставляли свои машины дома, позволяя местам с высоким спросом неоднократно переворачиваться в течение дня. Результат был хорош для бизнеса и хорош для уличного выступления.
Однако с инфляцией цена на счетчики становилась все ниже и ниже, а эффект нормирования ослабевал. Упустив из виду первоначальную причину установки счетчика, городские власти стали зависеть от доходов от парковки, но им не хватило политической воли, чтобы установить эффективную цену на бордюр, чтобы продолжить первоначальный успех. Вместо этого торговцы в центре города, опасаясь конкуренции со стороны растущих пригородов, боролись за дешевую или бесплатную парковку.
Бостон — поучительный случай. В январе 2011 года Бостон впервые за 25 лет повысил тарифы на счетчики после «10 лет обдумываний» (Andersen 2011). К моменту повышения ставки существовавшая ранее ставка счетчика в 1 доллар в час, установленная единообразно по всему городу, потеряла ценность из-за инфляции. Ставка была фактически вдвое меньше, чем когда она была установлена в середине 1980-х годов. Чтобы восстановить прежнюю ставку по счетчику, городу пришлось бы удвоить ставку до 2 долларов. Вместо того, чтобы использовать стратегию ценообразования, основанную на результатах, как объясняется ниже, городские власти просто повысили ставку до 1,25 доллара США и обосновали это повышение как способ увеличения доходов общего фонда города. Ввиду отсутствия обоснования управления поездками парковщики расценили повышение ставок как налог на водителей.
Ставка была фактически вдвое меньше, чем когда она была установлена в середине 1980-х годов. Чтобы восстановить прежнюю ставку по счетчику, городу пришлось бы удвоить ставку до 2 долларов. Вместо того, чтобы использовать стратегию ценообразования, основанную на результатах, как объясняется ниже, городские власти просто повысили ставку до 1,25 доллара США и обосновали это повышение как способ увеличения доходов общего фонда города. Ввиду отсутствия обоснования управления поездками парковщики расценили повышение ставок как налог на водителей.
Фото предоставлено: iStockphoto
Парковка на улице и в большинстве муниципальных или государственных внеуличных парковок, особенно на транспортных станциях, традиционно были бесплатными или устанавливались по фиксированным ценам, которые мало менялись в зависимости от местоположения или времени суток. В тех случаях, когда цены когда-то устанавливались в соответствии со спросом и предложением, неспособность ценообразования идти в ногу с инфляцией (и спросом) оставила муниципалитеты и агентства, отвечающие за ценообразование на парковку, без веских оснований для принятия мер. Как и в примере с Бостоном, парковка с фиксированной ценой во времени и в любом месте, независимо от спроса или инфляции, не сильно отличается от бесплатной парковки с точки зрения уменьшения заторов и доступа. Парковка с фиксированной ценой имеет преимущество перед бесплатной парковкой, поскольку она сигнализирует о плате за использование места, а не просто о праве на полосу отвода, но она далеко не соответствует своему потенциалу в качестве эффективного инструмента управления спросом.
Как и в примере с Бостоном, парковка с фиксированной ценой во времени и в любом месте, независимо от спроса или инфляции, не сильно отличается от бесплатной парковки с точки зрения уменьшения заторов и доступа. Парковка с фиксированной ценой имеет преимущество перед бесплатной парковкой, поскольку она сигнализирует о плате за использование места, а не просто о праве на полосу отвода, но она далеко не соответствует своему потенциалу в качестве эффективного инструмента управления спросом.
В 1960-х и 1970-х годах города, обеспокоенные конкуренцией со стороны пригородных торговцев, сосредоточились на попытках предложить бесплатные и вместительные парковочные места вместо того, чтобы сосредоточиться на доступе к парковке. Боулдер, штат Колорадо, однако, был исключением. Городские лидеры и торговцы Боулдера считали, что важным компонентом успеха является доступная парковка для тех, кто едет в главный деловой район, но в то же время они видели ценность рационализации доступа, понимая, что для того, чтобы предложить большое количество бесплатных парковок, необходимо сделали загородные застройщики, им пришлось бы делать перепланировку в загородном стиле. Разрешив крупномасштабное строительство парковок, город существенно подорвет стоимость земли и сам станет «пригородом». Вместо этого город учредил первый льготный район парковки, взимая плату за парковку, координируя уличную и внеуличную плату и используя доходы для улучшения других видов транспорта.
Разрешив крупномасштабное строительство парковок, город существенно подорвет стоимость земли и сам станет «пригородом». Вместо этого город учредил первый льготный район парковки, взимая плату за парковку, координируя уличную и внеуличную плату и используя доходы для улучшения других видов транспорта.
Вместо того, чтобы поддерживать фиксированные цены, города все чаще используют целостный подход, как это сделал Боулдер. Текущий подход рассматривает доступ в широком смысле, принимая во внимание все способы передвижения, и использует современные стратегии управления парковкой для определения и удовлетворения спроса. Эти города устанавливают тарифы на парковку для достижения конкретных целей занятости или других целей. В зависимости от целей и местных условий стоимость парковки может варьироваться в зависимости от местоположения, времени суток и наличия специального мероприятия. Политика и последующее ценообразование основаны на данных и предназначены для балансировки спроса в районах и центральных деловых районах. Поскольку они основаны на данных, эти политики позволяют городским властям быстро корректировать цены в зависимости от экономических изменений и изменений в землепользовании.
Поскольку они основаны на данных, эти политики позволяют городским властям быстро корректировать цены в зависимости от экономических изменений и изменений в землепользовании.
2.2 Ценообразование на основе результатов
Фиксированное ценообразование было стандартным вариантом ценообразования на парковку для городов с тех пор, как были введены парковочные счетчики. Хотя стоимость парковки может быть неадекватной, у нее есть свои преимущества. Схема ценообразования может быть реализована с помощью механических счетчиков, не требует дополнительного специального оборудования и не требует сбора данных об использовании и доступности парковок. К сожалению, фиксированное ценообразование не в состоянии управлять предложением парковок.
Ценообразование на парковку, основанное на целях производительности для улицы или транспортной системы, часто называемое ценообразованием на основе производительности, позволяет городам лучше управлять паркингом. Эксперты по парковке в целом согласны с тем, что от 10 до 20 процентов (одно или два места) уличной парковки на каждый квартал должны быть вакантными большую часть времени, чтобы уменьшить или устранить необходимость парковки (BPR, 1956; Levy, et al.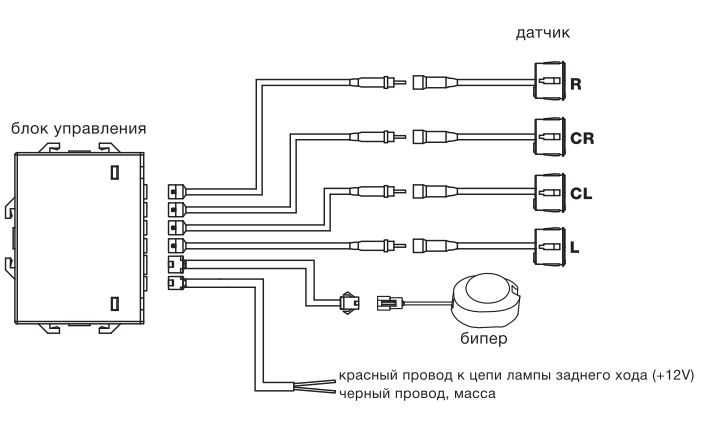 , 2012). ). Более высокий уровень вакансий может быть признаком того, что цены слишком высоки.
, 2012). ). Более высокий уровень вакансий может быть признаком того, что цены слишком высоки.
Хотя уровень вакантности от 10 до 20 процентов может быть наиболее распространенной целью, используемой городами, можно также рассмотреть и другие цели. Ценообразование может быть установлено для увеличения товарооборота, максимального извлечения выгоды и перехода путешественников от личных автомобилей к более экологичным способам передвижения. В любом случае стандарт производительности достигается за счет различных схем ценообразования, включая тарифы, которые увеличиваются по мере того, как человек находится на стоянке, цены, которые зависят от местоположения, цены, которые зависят от времени суток, или сочетание этих вариантов.
Внедрение программы ценообразования на основе результатов начинается с понимания местного контекста парковок и установления баланса между предложением парковок, как на улице, так и за ее пределами, и спросом. Точные и актуальные данные о спросе и предложении помогают определить соответствующие тарифы на парковку, но тарифы также можно установить эмпирическим путем. Сан-Франциско и Сиэтл являются хорошими примерами городов, которые эмпирически устанавливают ставки для сокращения круизов. Сан-Франциско применил комплексный подход с помощью «умных» счетчиков, которые могут принимать несколько форм оплаты, взимать переменные тарифы на парковку и записывать данные об использовании и продолжительности использования; датчики парковки; и очень продвинутая система сбора данных, в то время как Сиэтл экспериментирует с низкотехнологичным подходом, который фокусируется на ручных измерениях условий парковки на улице. Оба города стремятся установить тарифы, обеспечивающие соответствующий уровень доступного пространства (см. тематическое исследование Сиэтла в разделе 7 и выноска в Сан-Франциско в конце этого раздела).
Сан-Франциско и Сиэтл являются хорошими примерами городов, которые эмпирически устанавливают ставки для сокращения круизов. Сан-Франциско применил комплексный подход с помощью «умных» счетчиков, которые могут принимать несколько форм оплаты, взимать переменные тарифы на парковку и записывать данные об использовании и продолжительности использования; датчики парковки; и очень продвинутая система сбора данных, в то время как Сиэтл экспериментирует с низкотехнологичным подходом, который фокусируется на ручных измерениях условий парковки на улице. Оба города стремятся установить тарифы, обеспечивающие соответствующий уровень доступного пространства (см. тематическое исследование Сиэтла в разделе 7 и выноска в Сан-Франциско в конце этого раздела).
Переменные тарифы
Тарифы на парковку должны варьироваться в зависимости от различных параметров. Одно измерение должно быть географическим, поскольку в некоторых районах города спрос на парковку выше, чем в других. Тарифы также должны варьироваться в зависимости от времени суток, что уже является обычной практикой, поскольку тарифы по счетчику обычно действуют только в дневное время, а ночная парковка бесплатна. В нескольких городах, яркими примерами которых являются Нью-Йорк и Сан-Франциско, введены дифференцированные тарифы на парковку, которые меняются в зависимости от времени суток в зависимости от изменений спроса на парковку. Нью-Йорк внедрил переменные тарифы на парковку в двух экспериментальных районах. В одном районе пиковая ставка взимается с 12:00. и 19:00 а в другом районе пиковая ставка взимается с 18:00. и 22:00 Как и в большинстве приложений счетчиков, ночная парковка по-прежнему бесплатна, поэтому в течение дня остаются три различных ценовых режима. Тарифы также должны варьироваться в зависимости от дня недели, так как в некоторых районах спрос будет выше в будние дни, чем в выходные, и наоборот. Они также должны меняться во времени в более общем плане: по мере того, как инфляция снижает цены и по мере роста или снижения популярности районов, тарифы на счетчики должны колебаться, чтобы отражать эти реалии.
В нескольких городах, яркими примерами которых являются Нью-Йорк и Сан-Франциско, введены дифференцированные тарифы на парковку, которые меняются в зависимости от времени суток в зависимости от изменений спроса на парковку. Нью-Йорк внедрил переменные тарифы на парковку в двух экспериментальных районах. В одном районе пиковая ставка взимается с 12:00. и 19:00 а в другом районе пиковая ставка взимается с 18:00. и 22:00 Как и в большинстве приложений счетчиков, ночная парковка по-прежнему бесплатна, поэтому в течение дня остаются три различных ценовых режима. Тарифы также должны варьироваться в зависимости от дня недели, так как в некоторых районах спрос будет выше в будние дни, чем в выходные, и наоборот. Они также должны меняться во времени в более общем плане: по мере того, как инфляция снижает цены и по мере роста или снижения популярности районов, тарифы на счетчики должны колебаться, чтобы отражать эти реалии.
Несколько спорный подход заключается в изменении цен в режиме реального времени, который округ Колумбия предлагает ввести в экспериментальном порядке для некоторых уличных парковок коммерческого транспорта. Этот подход аналогичен полосе движения, цена которой определяется для обеспечения определенного времени в пути. По мере увеличения использования парковки в данном блоке цена увеличивается по сравнению с базовой ценой. Эта практика является более спорной в отношении парковки, поскольку среди большинства городских руководителей существует убеждение, что у людей должны быть разумные априорные ожидания в отношении цен. Кроме того, сохранение низкой цены для людей, прибывших в период высокой доступности, может оказаться контрпродуктивным. Такой результат побудил бы людей приходить раньше и оставаться на более длительное время.
Этот подход аналогичен полосе движения, цена которой определяется для обеспечения определенного времени в пути. По мере увеличения использования парковки в данном блоке цена увеличивается по сравнению с базовой ценой. Эта практика является более спорной в отношении парковки, поскольку среди большинства городских руководителей существует убеждение, что у людей должны быть разумные априорные ожидания в отношении цен. Кроме того, сохранение низкой цены для людей, прибывших в период высокой доступности, может оказаться контрпродуктивным. Такой результат побудил бы людей приходить раньше и оставаться на более длительное время.
Повышение цен
Часто используется при парковке вне улицы. Повышение ставок увеличивается по мере того, как транспортное средство находится на стоянке. Структура тарифов разработана таким образом, чтобы препятствовать длительной парковке, тем самым увеличивая оборот и доступность парковок. Дифференцированные тарифы – обычная практика в аэропортах. Операторы аэропортов обычно делят парковки на краткосрочные и долгосрочные. Ближайшие к терминалу места хорошо подходят для людей, которые высаживают или забирают пассажиров и будут использовать их только в течение короткого времени. Люди, которые будут парковаться на ночь или на несколько дней, часто размещаются дальше, поэтому у оператора аэропорта есть достаточное количество парковочных мест для тех, кому нужны более удобные места. Способ, которым аэропорты обеспечивают соблюдение различий, заключается в установлении разных цен. Часто они устанавливают повышающуюся цену на краткосрочный лот, чтобы препятствовать длительному пребыванию. Аэропорт Хартсфилд-Джексон в Атланте взимает с краткосрочных парковщиков 2 доллара в час в течение первых 2 часов, а затем 3 доллара в час в течение следующих 4 часов. В чикагском аэропорту О’Хара они берут 2 доллара за первый час, 3 доллара за второй час, ничего за третий час, а затем резко повышаются до 5 долларов за четвертый час и 19 долларов.0,00 за пятый час. Подобная эскалация побуждает людей парковаться только на короткие периоды времени для выполнения задачи.
Ближайшие к терминалу места хорошо подходят для людей, которые высаживают или забирают пассажиров и будут использовать их только в течение короткого времени. Люди, которые будут парковаться на ночь или на несколько дней, часто размещаются дальше, поэтому у оператора аэропорта есть достаточное количество парковочных мест для тех, кому нужны более удобные места. Способ, которым аэропорты обеспечивают соблюдение различий, заключается в установлении разных цен. Часто они устанавливают повышающуюся цену на краткосрочный лот, чтобы препятствовать длительному пребыванию. Аэропорт Хартсфилд-Джексон в Атланте взимает с краткосрочных парковщиков 2 доллара в час в течение первых 2 часов, а затем 3 доллара в час в течение следующих 4 часов. В чикагском аэропорту О’Хара они берут 2 доллара за первый час, 3 доллара за второй час, ничего за третий час, а затем резко повышаются до 5 долларов за четвертый час и 19 долларов.0,00 за пятый час. Подобная эскалация побуждает людей парковаться только на короткие периоды времени для выполнения задачи.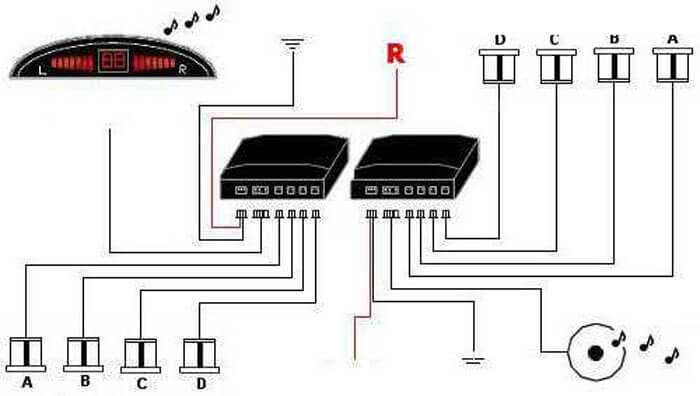 В случае с аэропортом задача состоит в том, чтобы забрать пассажиров.
В случае с аэропортом задача состоит в том, чтобы забрать пассажиров.
Города также могут использовать эту модель, если они хотят увеличить оборот парковки. Например, они могут захотеть использовать этот подход в коммерческих районах, где много доставок. Если доставка может быть осуществлена за 1 или 2 часа, очень высокая плата за третий и четвертый час будет препятствовать парковщикам, работающим в течение всего дня, что обеспечит адекватную скорость оборота, чтобы можно было разместить доставку. В Нью-Йорке определенные места по всему городу предназначены для коммерческого транспорта. Ставка для этих пространств составляет 4 доллара США за первый час, 5 долларов США за второй час и 6 долларов США за третий час.
2.3 Оборот парковок по сравнению с доступностью парковок
Города, которые приняли четкие цели по эффективности, обычно стремятся достичь определенного уровня оборота парковок или определенного уровня доступности парковок. В основе каждой цели лежит задача, заключающаяся в том, чтобы люди, желающие припарковаться, могли сделать это с минимальными затратами на поиск.

Технический прогресс значительно упростил получение данных, установление и корректировку цен. Новые системы интеллектуальных счетчиков могут поддерживать несколько форм оплаты, взимать переменные тарифы на парковку и записывать данные об использовании и продолжительности использования. Эти счетчики могут быть дополнены датчиками парковки и технологией считывания номерных знаков, которые с разной степенью успеха использовались городами для определения занятости.
Внедрение различных стратегий ценообразования не требует передовых технологий, но становится намного проще и защищеннее благодаря новым технологиям измерения и сбора данных. Эти технологические достижения являются предметом следующего раздела.
Фото: SFparkСФ парк
SF park на сегодняшний день является крупнейшей и самой сложной в стране программой парковки с высокими эксплуатационными характеристиками.
Он включает в себя 6000 парковочных мест в семи пилотных районах и получил более 19 миллионов долларов федеральных средств для реализации. Основная цель SF park — установить цены на принадлежащие городу парковки на улицах и за их пределами по ставкам, которые помогут перераспределить спрос и обеспечить наличие одного парковочного места на квартал, а также наличие хотя бы части парковочных мест в каждом квартале. гаражи. Кроме того, СФ парк предназначен для изменения отношения общественности к уличной парковке со счетчиком, предоставляя более качественную информацию о парковке и обслуживание клиентов.
В основе программы лежат технологические инновации и сбор данных: датчики на каждом из 6000 парковочных мест собирают информацию о занятости в режиме реального времени, которая используется для принятия будущих ценовых решений, основанных на данных и понятных путешественникам. Смарт-счетчики играют решающую роль в программе, позволяя SF парк , чтобы взимать разные тарифы в разное время и дистанционно корректировать цены.
