
конструкция с короткозамкнутым ротором, работа трёхфазного варианта
Сегодня трудно встретить механическое электрооборудование без использования асинхронного двигателя с короткозамкнутым ротором. Изобретение позапрошлого века до сих пор активно применяется и совершенствуется. В любой машине есть такое устройство. Благодаря ему жизнь людей вышла на новый уровень. Она стала немыслимой без электромоторов. Не удивительно, что многие желают узнать, как всё это работает.
- Немного истории
- Основное устройство
- Принцип работы
Немного истории
В конце позапрошлого века итальянский учёный Г. Феррарис написал статью с теоретическими выкладками асинхронного электродвигателя. В то же время в 1988 году американский учёный с австро-венгерскими корнями Н. Тесла запатентовал это устройство. А на следующий год российский изобретатель М. О. Доливо-Добравольский придумал и создал первый асинхронный двигатель с короткозамкнутым ротором.
Принцип действия этого устройства до наших дней является основополагающим в работе всех электродвигателей. Сам Михаил Осипович первым применил своё изобретение в деле. В Новороссийске была построена первая электросеть с использованием устройства на трёхфазном асинхронном двигателе. Местный элеватор был оборудован трансформаторами и машинами новой, по тем временам, технологии.
В наши дни трудно представить электромеханику без изобретения Доливо-Добровольского. На разработанных им принципах работают все современные электродвигатели. Вот основные ключи успеха данного изобретения:
- невероятная простота и лёгкость в изготовлении;
- коммерческая выгода. Малые затраты и большой спрос на такие изделия;
- большая эффективность и надёжность — всегда привлекают и обеспечивают постоянный спрос;
- лёгкость в эксплуатации и большой диапазон сфер применения.
Судя уже по этим ключам, спрос на подобные изделия будет большим ещё долгие годы.
К тому же прогресс не стоит на месте, многие изобретатели продолжают усовершенствовать конструкцию двигателя.

Основное устройство
Если внимательно рассмотреть схему асинхронного двигателя, то сразу станет заметным наличие в ней двух основных деталей.
Без статора и ротора этот агрегат просто немыслим. Благодаря им образуется электромагнитное поле и вырабатывается электроток.
Статор обычно имеет статическое положение. Он всегда цилиндрической формы. Делают его из стали. Внутри имеются пазы с уложенной в них обмоткой. Применяют угол в 120 градусов для смещения обмоток относительно друг друга. Соединяют концы обмоток звездой или треугольником — это зависит от подаваемого на прибор напряжения.
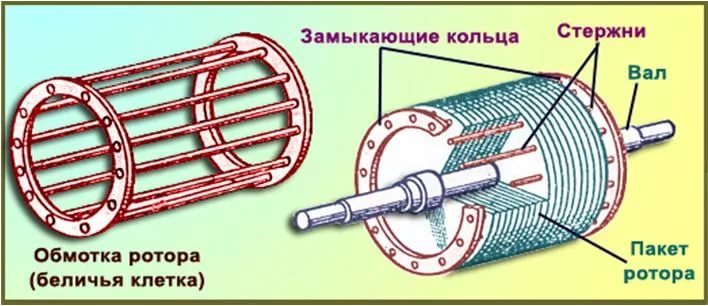
Ротор — вращающаяся часть. Он тоже имеет пазы и обмотку. Они бывают двух видов: фазные и короткозамкнутые. Фазные обмотаны как статоры и подсоединяются так же, а короткозамкнутые имеют алюминевый заливной сердечник.
Кроме основных деталей, имеются вспомогательные. Они могут различаться по строению и конструкции, но чаще всего присутствуют на всех двигателях подобного вида. Вот эти детали:
- основной вал, на который крепится ротор;
- подшипники. Без этих деталей просто невозможно сегодня представить подвижные механизмы с быстрым вращением;
- щиты для крепления подшипников;
- лапы для крепления двигателя на месте работы;
- основной кожух, срывающий внутренности двигателя;
- кожух вентилятора. Служит для укрытия лопастей;
- крыльчатка вентилятора. Её основное предназначение — не давать двигателю перегреваться;
- коробка для клемм вывода. Место подсоединения электродвигателя к электропроводке.
В зависимости от модели, устройство трёхфазного асинхронного двигателя может выглядеть по-разному, но, как правило, основные узлы в них присутствуют.
Более современные модели оснащают электронными датчиками и другими приборами, улучшающими удобство их эксплуатации.
Принцип работы
Простота присуща этому двигателю во всём. В том числе и в принципе действия. Трёхфазный асинхронный двигатель использует закон электромагнитной индукции. Как видно из устройства электродвигателя, он состоит из двух электромагнитов. По закону ЭМЭ при вращении возникает движущая сила, которая по закону Ампера будет поддерживать вращение ротора в статере и продолжать вырабатывать ток.
Частоту вращения магнитного поля в статоре вычисляют, поделив частоту переменного тока (умноженную на 60 минут) на число пар полюсов трёхфазной обмотки. Имея эту величину, вычисляют скольжение электродвигателя. Для этого вычитают из частоты вращения ЭМП частоту вращения ротора и делят разность на частоту вращения ЭМП.
На холостом ходу скольжение равно 0, а в фазе короткого замыкания и полной остановки равно 1 или 100%. Чем больше механическая нагрузка на вал вращения, тем выше показатель скольжения. Для электродвигателей определяется номинальное скольжение. Для малых и средних мощностей этот показатель варьируется в пределах от 8 до 2%.
Чем больше механическая нагрузка на вал вращения, тем выше показатель скольжения. Для электродвигателей определяется номинальное скольжение. Для малых и средних мощностей этот показатель варьируется в пределах от 8 до 2%.
Сфера применения электродвигателей настолько обширна, что трудно представить, что станет с жизнью человека, если исчезнут все такие устройства. Однако, они не только не исчезают, но и наоборот, их становиться всё больше. Это способствует дальнейшему научному прогрессу человечества.
Конструкции роторов паровых турбин и технические требования к ним при изготовлении на производстве
Автор фото MAN SE, CC BY 3.0, через Викисклад.
Собранные роторы паровых турбин представляют собой высоконагруженные вращающиеся конструкции. Их основные составные части: собственно роторы или валы роторов, диски, соединительные муфты, втулки лабиринтовых уплотнений и некоторые другие — представляют собой детали типов длинных или коротких тел вращения.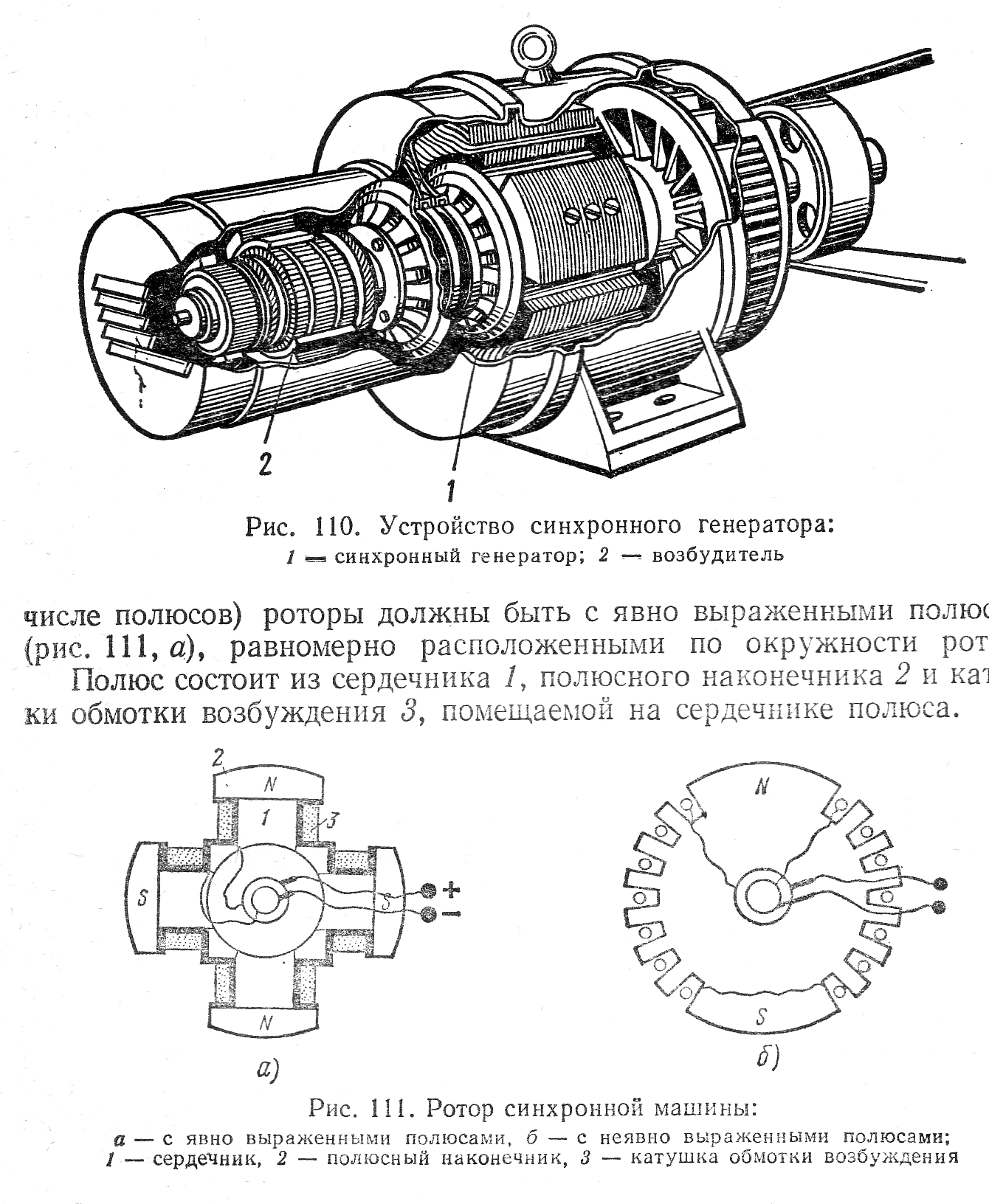 На рис. 7.1 приведены примеры конструкций роторов в состоянии завершенной механической обработки для соединения их с другими деталями.
На рис. 7.1 приведены примеры конструкций роторов в состоянии завершенной механической обработки для соединения их с другими деталями.
На рис. 7.1, а приведен ротор мощной паровой турбины. Элементы соединения ротора с хвостами лопаток размещены в дисковых частях, выполненных непосредственно в теле самого ротора.
Комбинированная конструкция ротора (рис. 7.1, б) состоит из частей, одна из которых (диски) выполнена в теле ротора; другая — представляет собой вал с посадочными поверхностями, которыми она соединяется с насадными дисками. С соблюдением этого принципа созданы конструкции роторов и мощных паровых турбин.
На рис. 7.1, в изображен вал ротора с посадочными поверхностями под соединение с насадными дисками другими деталями. Такая конструкция широко применяется как в паровых турбинах, так и в компрессорах газотурбинных установок (ГТУ).
Рис. 7.1. Роторы паровых турбин различной конструкции.
Конструкция (рис. 7.1, г) сходна с конструкций (рис. 7.1, в), но в первой — направление ступеней посадочных цилиндрических поверхностей одностороннее, а во второй конструкции — двустороннее. Конструкция (рис. 7.1, г) служит валом ротора компрессоров газотурбинных установок.
7.1, г) сходна с конструкций (рис. 7.1, в), но в первой — направление ступеней посадочных цилиндрических поверхностей одностороннее, а во второй конструкции — двустороннее. Конструкция (рис. 7.1, г) служит валом ротора компрессоров газотурбинных установок.
Конструкция, изображенная на рис. 7.1, д, представляет собой полый ротор барабанного типа. Его особенность заключается в том, что хвосты лопаток помещаются непосредственно в кольцевые пазы вала. Этот ротор состоит из основной части и отдельной концевой части. Он преимущественно применяется в газотурбинных установок.
Конструкция (рис. 7.1, е) представляет собой сборный ротор газовой энергетической турбины большой мощности. Она собирается из концевых частей, между которыми помещены диски. Детали соединяются в ротор рядом болтов. Созданы аналогичные этим роторам конструкции сборных роторов и компрессоров приводных газотурбинных установок. Встречаются и иные конструкции соединения деталей в сборные роторы. В частности, соединение деталей сборных роторов достигается стяжкой резьбовым стержнем и торцовыми зубцами на дисках и концевых частях.
Кроме рассмотренных элементов на роторе размещены опорные шейки, сопрягаемые в процессе работы со вкладышами подшипников, цилиндрические и конические поверхности, сопрягаемые с деталями муфт, элементы уплотнений, фланцевые элементы муфт, как это, например, изображено на рис. 7.1, г, шпоночные пазы и др.
О требуемых точности, шероховатости наружных цилиндрических торцовых и других поверхностей и их взаимного расположения дает представление конструкция ротора высокого давления (РВД) паровой турбины мощностью 800 МВт (рис. 7.2). Длина и диаметр наибольшего диска приведены на упомянутом рисунке.
Рис. 7.2. Размерная и точностная характеристика ротора мощной паровой турбины.
Для улучшения эксплуатационных условий при обработке турбинных роторов, кроме указанных, должен выполняться еще ряд технических требований. Допуск на взаимное расположение опорных поверхностей шпоночных пазов, размещаемых по окружности, посадочных поверхностей под полумуфты в целях обеспечения собираемости должен быть повышен до ±2″, а по непараллельности опорных поверхностей к плоскостям, проходящим через ось посадочной поверхности, — до 0,01 мм на длине 500 мм.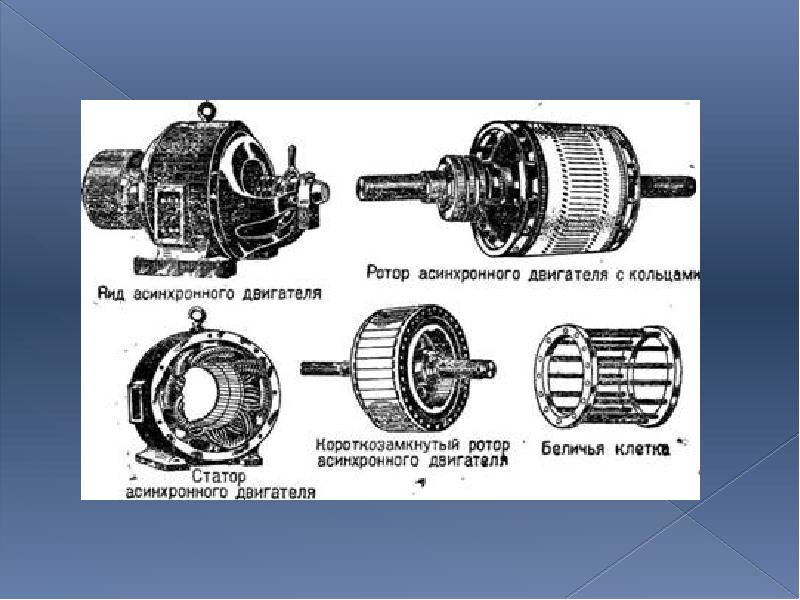 «Спаривание» роторов, фланцы муфт которых выполнены непосредственно в теле ротора турбины, может быть обеспечено соблюдением допуска на диаметр межосевых расстояний в пределах 0,01 мм, угловому расположению — до 2,0″. При этом общая погрешность расположения отверстий от номинального положения не должна превышать ±0,0075 мм. Допуск на биение и неперпендикулярность торцовой поверхности фланцев муфт относительно опорных шеек задается в пределах 0,005 мм на ширине кольцевой части торца.
«Спаривание» роторов, фланцы муфт которых выполнены непосредственно в теле ротора турбины, может быть обеспечено соблюдением допуска на диаметр межосевых расстояний в пределах 0,01 мм, угловому расположению — до 2,0″. При этом общая погрешность расположения отверстий от номинального положения не должна превышать ±0,0075 мм. Допуск на биение и неперпендикулярность торцовой поверхности фланцев муфт относительно опорных шеек задается в пределах 0,005 мм на ширине кольцевой части торца.
Центральная часть турбинного ротора чаще всего представляет сквозную полость. Встречаются и иные конструкции. В табл. 7.1 приведены конструкции полостей и даны их характеристики. Одно из назначений полости — выявление и устранение пороков.
Недорогое ТО для Хендай в кредит.Rotor Design
30 курсов ECTS @DTUНажмите здесь , чтобы найти информацию о курсах в DTU. | ||
обязательный | Моделирование турбулентности | 5 |
| 46300 | Технология ветряных турбин и аэродинамика | 10 |
| 41320 | Усовершенствованная гидромеханика | 5 |
Факультативы |
| ECTS |
| 46500 | Вероятностный метод в ветроэнергетике | 5 |
| 34840 | Основы Акустики и контроля шума | 5 |
| 46200 | Планирование и разработка ветряных электростанций (январь) | 5 |
| 41316 | Advanced CFD | 5 |
| 02610 | Опция синхронизация и подбор данных | 5 |
30 курсов ECTS, в т. ч. возможная профессиональная подготовка @TU Delft Второй семестр в TU Delft делится на две четверти. Нажмите здесь, чтобы найти информацию о курсах в Делфтском техническом университете. ч. возможная профессиональная подготовка @TU Delft Второй семестр в TU Delft делится на две четверти. Нажмите здесь, чтобы найти информацию о курсах в Делфтском техническом университете. | |||
Обязательный | ECTS | ||
| AE4010 | Методологии исследования* | 90 013 2||
| AE4ASM506 | Аэроупругость | 3 | |
| AE4W21-14 | Аэроупругость ветряной турбины 90 010 | 2 | |
| AE4180 | Техника измерения расхода | 3 | |
| AE4135 | Аэродинамика ротора | 4 | |
| AE4W13 | Условия площадки для проектирования ветряной турбины | 3 | 90 011|
| AE4W09 | Проектирование ветряных турбин | 5 | |
| WM0324LR | Этика и проектирование для AE | 3 | |
Факультативы | |||
| AE5055 | Профессиональное обучение 9 | Базовый курс нидерландского языка для иностранцев — Структурное взаимодействие | 4 |
| OE44120 | Проект морских ветряных электростанций (недоступно в 2022 г.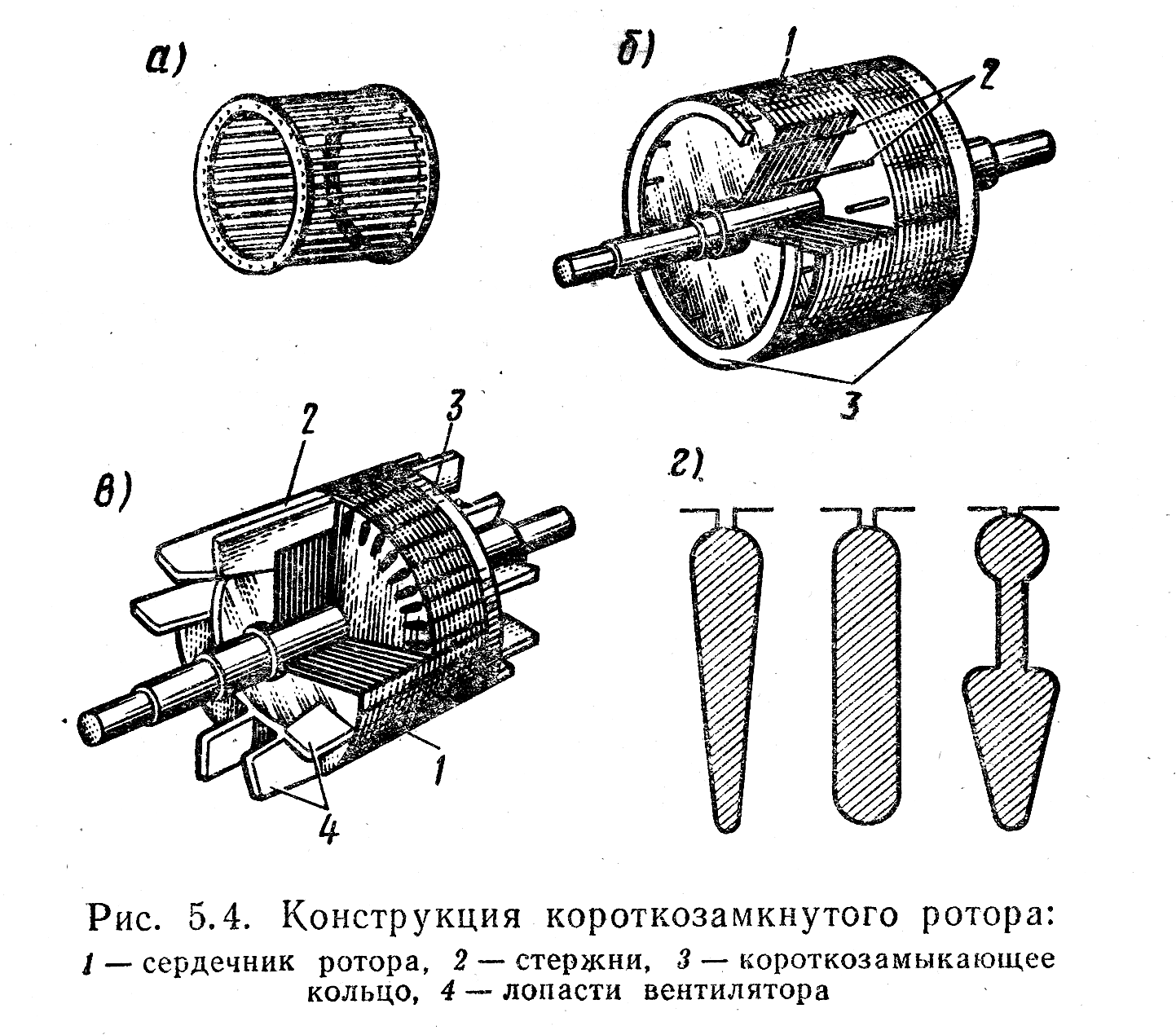 /23) /23) | 4 | |
*Этот курс может быть проведен либо во 2 -м, так и 3 -м семестре ** Этот курс может пройти только в качестве дополнительного курса (т. Е. выше требуемого 30) и будет не фигурировать в дипломе ДТУ | |||
15 курсов ECTS + начало 45 ECTS Диссертация | ||
Обязательный | 90 ECTS 015 | |
| AE4010 | Методология исследований (Технический университет Делфта)* | 2 |
| Один из двух следующих курсов: | ||
| 46320 | Нагрузки, аэродинамика и управление ветровыми турбинами | 10 |
| 46400 | Методы измерения ветряных турбин 9001 0 | 10 |
| Магистерская диссертация (с 1 ноября) | 45 | |
Факультативы | ||
| 34840 | Основы акустики и контроля шума | 5 |
| 46500 | Вероятностный метод в ветроэнергетике | 5 |
| 41316 | Advanced CFD | 90 013 5|
| 02450 | Введение в машинное обучение и интеллектуальный анализ данных | 5 |
| 02610 | Оптимизация и подгонка данных | 5 |
| 46205 | ТЭО энергетических проектов | 5 |
| *Если вы не проходили этот курс во 2 семестре | ||
Диссертация 45 ECTS (свободная мобильность)**
| ||
| Магистерская диссертация должна быть завершена 31 июля | ||
Обязательное DTU | ECTS | |
| Магистерская диссертация | 45 | |
Обязательные ТУ Делфт | ||
| AE591 2 | Магистерская диссертация | 45 |
| *Магистерская диссертация находится под контролем двух университетов, присуждающих степень | ||
Курсы 30 ECTS @ DTU Нажмите здесь, чтобы найти информацию о курсах в DTU. | ||
обязательный | Композитные материалы и волокна | 5 |
| 46300 | Технология ветряных турбин и аэродинамика | 10 |
| 4152 5 | Методы конечных элементов | 10 |
Факультативы* | ECTS | |
| 41526 | 9001 3 Механика разрушения5 | |
| 34840 | Основы акустики и шумоподавления | 5 |
| 46200 9001 0 | Планирование и разработка ветряных электростанций (январь) | 5 |
| 02450 | Введение в машинное обучение и интеллектуальный анализ данных | 5 |

30 курсов ECTS, в т.ч. возможная профессиональная подготовка @TU DelftВторой семестр в TU Delft делится на две четверти.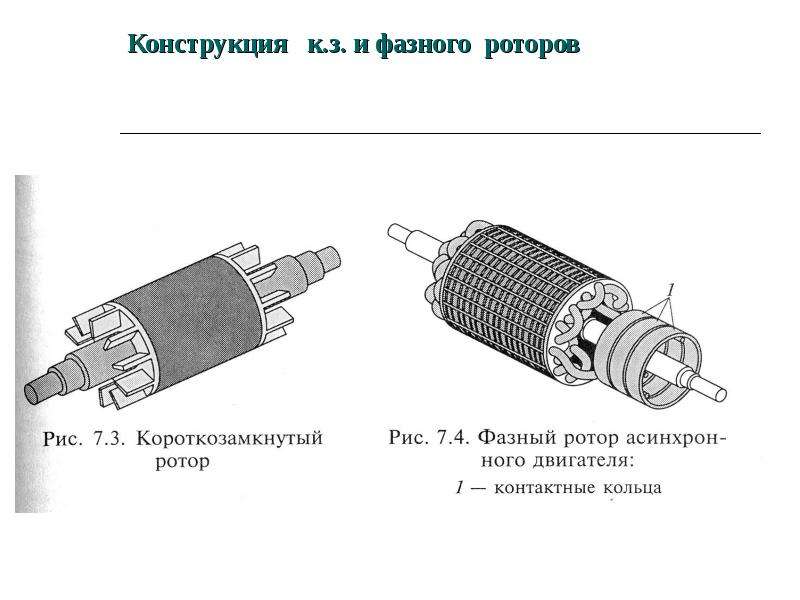 Нажмите здесь, чтобы найти информацию о курсах в Делфтском техническом университете. Нажмите здесь, чтобы найти информацию о курсах в Делфтском техническом университете. | ||
Обязательное | ECTS | |
| AE4010 | Методологии исследования* | 2 |
| AE4ASM506 | Аэроупругость | 3 |
| AE4W21-14 | Wind Tur bine Аэроупругость | 2 |
| AE4ASM505 | Нелинейное моделирование (с использованием МКЭ) | 3 |
| AE4ASM109 | Проектирование и анализ композитных конструкций I | 5 |
| AE4ASM105 | Composite Trinity, упражнение | 4 |
| AE4W09 | Проектирование ветряных турбин | 5 |
| WM0324LR | Этика и инженерия для AE | 3 |
Факультативы | ||
| AE4ASM510 | Проектирование и анализ композитных материалов Конструкции II | 3 |
| AE4ASM511 | Устойчивость и анализ конструкций II | 3 |
| AE5055 | Профессиональное обучение | 6 |
| AE4117 | Взаимодействие жидкости и конструкции | 4 |
| WM1115TU** | Начальный курс нидерландского языка для иностранцев | 3 |
*Этот курс можно пройти во 2-м или 3-м семестре ** Этот курс можно пройти только в качестве дополнительного курса (т. | ||
 е. выше требуемого 30EC) и он не будет отображаться в дипломе DTU
е. выше требуемого 30EC) и он не будет отображаться в дипломе DTU 15 курсов ECTS + начало 45 ECTS Диссертация | ||
Обязательный | 90 ECTS 015 | |
| AE4010 | Методология исследований (Технический университет Делфта)* | 2 |
| Один из двух следующих курсов: | ||
| 46320 | Нагрузки, аэродинамика и управление ветровыми турбинами | 10 |
| 46400 | Методы измерения ветряных турбин 9001 0 | 10 |
| Магистерская диссертация (с 1 ноября) | 45 | |
Факультативы | ||
| 41526 | Механика разрушения | 5 |
| 34840 | Основы акустики и борьбы с шумом | 5 |
| 46100 | Введение в микрометеорологию для ветроэнергетики | 5 |
| 02610 | Оптимизация и подгонка данных | 5 |
| * Если вы не проходили этот курс во 2 семестре | ||
Диссертация 45 ECTS (свободная мобильность)**
| ||
| Магистерская диссертация должна быть завершена 31 июля | ||
Обязательный DTU | ECTS | |
| Магистерская диссертация | 45 | |
ТУ Делфт | ||
| AE5912 | Магистерская диссертация | 45 |
| *Магистерская работа находится под руководством двух университетов, присуждающих ученую степень | ||
Несущий винт является наиболее важным и сложным компонентом вертолета. Размер главного ротораРазмер имеет значение. Размер несущего винта оказывает широкое влияние на конструкцию, затрагивая почти все критерии. Здесь мы сосредоточимся на производительности, но сначала кратко обсудим некоторые простые практические вопросы. Размер несущего винта может быть ограничен, чтобы он мог поместиться в определенных местах. Например, военные вертолеты могут потребоваться для установки в лифте на авианосце. Конечно, этого ограничения можно избежать, сконструировав складной ротор (например, см. это видео о V-22), но с повышенной сложностью и стоимостью. Нисходящая струя может ограничивать размер несущего винта с другого конца. При одинаковом весе меньшие роторы имеют больший поток вниз. Теперь поговорим о производительности. Большие несущие винты более эффективны, чем маленькие. Роторы большего размера могут поднимать больший вес на единицу мощности/топлива. Почему? Проще говоря, больший ротор не должен работать с воздухом так же сильно, как меньший. Роторы создают тягу, отбрасывая воздух вниз, создавая поток вниз. Согласно Ньютону, эта тяга равна произведению массы и ускорения потока вниз. Чтобы поднять тот же вес, меньший ротор должен сообщать большее ускорение меньшему объему (массе) воздуха. Это создает большую скорость нисходящего потока, хотя и на меньшей площади. 92) термин означает, что когда тот же импульс сообщается воздуху, требуется больше энергии, чтобы сделать это с меньшей массой и большим ускорением. Следовательно, более крупный ротор, ускоряющий больший объем воздуха на меньшую величину, более эффективен. Количество лопастей ротораСтоимость и вибрация вертолета особенно чувствительны к количеству лопастей несущего винта. Если вы завяжете глаза опытному пилоту и отправите его на прогулку, он, вероятно, сможет сказать вам, имеет ли несущий винт две или четыре лопасти. Удивительно, но производительность меньше зависит от количества лезвий. Есть плюсы / минусы производительности, которые примерно уравновешиваются. Например, меньшему количеству лопастей требуется большая длина хорды для создания той же тяги, что обеспечивает преимущества L/D за счет эффектов Рейнольдса. Однако такие лопасти имеют меньшее удлинение и, следовательно, имеют большие потери на конце. Вибрация — сильный враг вертолетов. Это больше, чем раздражение для пилотов и пассажиров. Вибрация вызывает реальную усталость, которая может сократить время полета. Это также старит все детали вертолета, сокращая их срок службы и увеличивая затраты на техническое обслуживание. Наибольший источник вибрации возникает на частоте \(Nf\), где \(N\) — число лопастей, а \(f\) — частота несущего винта (скорость его вращения). При одинаковой скорости ротора это означает, что вибрация 4-лопастного ротора в два раза превышает частоту вибрации 2-лопастного ротора. Плохое воздействие вибрации зависит от амплитуды и частоты. Для получения дополнительной информации о том, как вибрация влияет на человека, прочитайте это. Большее количество лезвий менее желательно с точки зрения конструкции. Как упоминалось ранее, длина хорды обратно пропорциональна количеству лопастей. При вдвое большем количестве лопастей длина хорды каждой будет вдвое меньше. Каждое лезвие должно нести вдвое меньшую нагрузку, но жесткость конструкции будет на 90 227 меньше, чем на половину 90 228 (при прочих равных условиях). Скорость главного ротора Несущие винты большего размера на традиционных вертолетах предназначены для работы в небольшом диапазоне скоростей, т.е. от 290 до 310 об/мин. Скорость ротора в основном влияет на шум и вес ротора и системы привода. Шум ротора трудно предсказать, но он примерно соответствует 5 th мощности скорости вращения кончика ротора! Конечная скорость выше 750 футов/с, как правило, слишком громкая для практичного самолета. С другой стороны, более быстрые лопасти ротора испытывают большее динамическое давление и, следовательно, нуждаются в меньшей хорде для создания той же подъемной силы. Это означает, что более быстрые роторы облегчают использование лопастей меньшего размера. Более высокие скорости вращения ротора также снижают крутящий момент (на единицу мощности), что позволяет использовать более дешевые и легкие приводные системы. Скорость ротора ограничена по высокой и низкой стороне несколькими другими факторами. В прямом полете скорость наступающей лопасти (относительно воздуха) равна скорости зависания плюс скорость поступательного полета. Если скорость приближается к скорости звука, области воздуха вокруг лопасти сжимаются, возникают ударные волны, и аэродинамические нагрузки становятся неуправляемыми. Например, сильный момент тангажа вниз, называемый Mach tuck , может повернуть носовую часть продвигающейся лопасти вниз. С другой стороны, скорость ховер-типа должна быть как минимум в два раза больше максимальной желаемой скорости движения вперед. В противном случае при максимальной скорости движения отступающая лопасть остановится, не имея достаточной скорости относительно воздуха. Это называется остановкой отступающей лопасти или RBS. Эффект сжимаемости требует более низкой скорости несущего винта при более высокой скорости самолета, в то время как сваливание лопасти назад требует более высокой скорости несущего винта при более высокой скорости самолета. Форма лопасти и конструкция аэродинамического профиляПроизводительность и стоимость зависят от формы лезвия. Форма поперечного сечения лопасти называется «формой аэродинамического профиля» и показана на рисунке ниже. Конструктор лопасти должен выбрать формы аэродинамического профиля по длине лопасти, а также их размер (длину хорды) и ориентацию (крутку). Мы кратко обсудим это здесь. Формы аэродинамического профиля предназначены, среди прочего, для крыльев самолетов, лопастей ветряных турбин и лопастей вертолетов. Для каждого из них существует множество различных проектных ограничений/целей. Мы не будем здесь вдаваться в детали конструкции несущего винта вертолета. Достаточно сказать, что аэродинамические поверхности выбираются с учетом конструктивных соображений, технологичности, акустических свойств и характеристик подъемной силы/сопротивления. После того, как аэродинамический профиль выбран, можно придать форму трехмерной форме лопасти. Эта форма определяется длиной хорды, круткой и распределением аэродинамического профиля вдоль лопасти. Если будет использоваться несколько аэродинамических профилей, проектировщики должны выбрать, какие аэродинамические поверхности будут использоваться, где на лопасти. Например, аэродинамический профиль А будет использоваться от кончика до 18 футов, аэродинамический профиль В будет использоваться от 16 до 12 футов, …. Это то, что подразумевается под аэродинамическим распределением. Для перехода между аэродинамическими профилями будет использоваться некоторый метод интерполяции форм аэродинамических профилей, например. от 16’ до 18’ в примере. Форма аэродинамического профиля безразмерна, но настоящие лопасти имеют определенный размер или длину хорды в каждом месте по всей длине. Например. аэродинамический профиль радиусом 10 футов будет иметь хорду 1,1 фута. Это распределение хорды или конусность должны быть выбраны для обеспечения достаточной тяги при расчетной частоте вращения ротора. Подъемная сила пропорциональна длине хорды, поэтому хорда должна быть достаточно большой, чтобы поднять вес вертолета и обеспечить тягу для ускорения и преодоления сопротивления на высокой скорости движения вперед. Однако, если аккорд слишком велик, это приведет к снижению производительности. Аэродинамический профиль с большей хордой должен работать при меньшем угле атаки, что приводит к избыточному сопротивлению (работа при меньшем L / D). Простое изготовление прямоугольного лезвия с одинаковой длиной хорды везде является простым и дешевым в производстве, но требует снижения производительности. Оптимальная эффективность требует равномерной индуктивной скорости по всему ротору, что требует конической лопасти с очень большой внутренней хордой, сужающейся к концу. Лопасти также скручены – профили развернуты передней кромкой вниз от основания к кончику лопасти. Например, схватить кончик лезвия и повернуть его переднюю кромку вниз. Почему? Вращение ротора заставляет внешнюю часть лопасти двигаться намного быстрее, чем внутреннюю часть — скорость вращения является произведением угловой скорости ротора и расстояния от оси вращения \(\Omega r\). Однако вертикальный поток воздуха с наведенной скоростью (нисходящий поток) примерно одинаков по длине лопасти. В результате «угол натекания» воздуха уменьшается вдоль лопасти от корня к кончику. Диаграмма ниже может помочь вам увидеть это. Без закручивания внутренние аэродинамические поверхности будут работать под небольшим или отрицательным углом атаки, а внешние аэродинамические поверхности будут глохнуть. Чтобы лопасть работала под желаемым углом атаки (угол наклона лопасти минус угол втекания), ее необходимо закрутить/наклонить вверх от кончика к основанию. Идеальные аэродинамические поверхности, хорда и крутка более важны для внешней части лопасти. Внутри конструктор может нарушать аэродинамические идеалы в большей степени из соображений стоимости, конструкции или других практических преимуществ. Это связано с тем, что внешняя часть лезвия более критична для производительности. Если предположить, что тяга равномерно распределена по площади несущего винта, сечение лопасти от 192\) и обеспечивает только 1% тяги. Дизайн наконечника лезвия — это унизительная работа для лучших инженеров. Даже в режиме зависания кончики лопастей испытывают сложный трехмерный воздушный поток. Это связано с тем, что аэродинамические силы должны упасть до нуля на кончике, вызывая образование вихрей, которые движутся вдоль лопасти по размаху. Во многих конструкциях просто используется квадратный наконечник лезвия, что позволяет избежать сложного анализа наконечника. Однако наконечник имеет решающее значение, поскольку на единицу длины он (1) покрывает наибольшую площадь ротора, (2) оказывает наибольшее влияние на образование вихрей, (3) наиболее подвержен сжимаемости и (4) имеет наибольшую влияние на шум ротора и упругий изгиб лопастей. Таким образом, как бы сложно это ни было, были разработаны альтернативные формы наконечников. Основной функцией нестандартных наконечников является снижение сжимаемости. Сметая кончик лопасти (или ее переднюю кромку) назад, можно уменьшить скорость воздуха по нормали к передней кромке – скорость воздуха относительно сечения лопасти с частотой вращения \(\Омега\) на расстоянии \( r\) от хаба \(\Omega r\). Однако, если передняя кромка наклонена под углом \(\delta\), скорость, нормальная к передней кромке, уменьшается до \(\Omega r \cos\delta\). Стреловидные лопасти также могут демонстрировать гораздо более эластичное скручивание. Силы, воздействующие на носовую часть стреловидности назад, имеют тенденцию скручивать носовую часть лопасти вниз и наоборот. Это можно использовать для повышения производительности и даже продольной устойчивости. Конструкция втулки ротораКонструкция втулки несущего винта может быть упущена из виду посторонними, но эксперты знают, что тип втулки имеет решающее значение для стоимости/ремонтопригодности, безопасности и летных качеств. Оперение — это вращение лезвия по его длине. Частично это видно на этом видео. Пилот управляет оперением, чтобы контролировать траекторию полета, как описано здесь. Ступица несущего винта должна обеспечивать возможность оперения каждой лопасти независимо от других лопастей. Обычно это делается с помощью автомата перекоса, как описано здесь. Оперение изменяет угол атаки лопастей, что изменяет аэродинамическую подъемную силу и вызывает взмахи крыльев. Когда лопасть взмахивает (или опускается), ее центр масс перемещается ближе к втулке. Подобно вращающемуся конькобежцу, рисующему руками, это заставляет лезвие вращаться быстрее за счет сохранения углового момента (эффект Кориолиса). В зависимости от количества лезвий, следующее лезвие может пытаться «замедлить», в то время как это пытается «ускориться». Ступица несущего винта облегчает все эти движения лопастей, удерживая лопасти прикрепленными к валу. Это достигается в сложных условиях. Огромные центробежные силы оттягивают каждое лезвие от ступицы, в то время как двигатель передает мощность до тысячи лошадиных сил на вал. Высококолебательные воздушные грузы весом более 20 000 фунтов поднимают лопасти. Тонкие аэродинамические лопасти также не являются жесткими. В полете они вибрируют в разных режимах, как гитарная струна. Это передает сложные вибрации и нагрузки на ступицу. В этой среде концентратор должен работать практически с нулевой вероятностью отказа. В отличие от отказа двигателя, отказ в управлении оперением или любой из этих шарниров/изгибов почти наверняка означает смерть. Оперение Теперь, когда мы обсудили, что нужно для втулки несущего винта, давайте рассмотрим некоторые используемые концепции конструкции. Во-первых, флюгирование достигается за счет использования флюгерного шарнира между ступицей и лопастью. Рядом с основанием лопасти, за пределами этого шарнира, звено с шагом прикрепляет лопасть к автомату перекоса. В этой статье содержится дополнительная информация о автоматах перекоса. Для целей этой статьи достаточно сказать, что автомат перекоса перемещает звенья шага вверх/вниз, заставляя лопасти вращаться (тангаж) вокруг этого шарнира оперения. Следовательно, оперение управляется движением автомата перекоса, которое само по себе управляется управляющими входами пилота. (Хотя лопасти несущего винта намного меньше по величине, они также скручиваются под действием аэродинамических сил, что также изменяет угол тангажа дальше наружу.) Щелкните здесь, чтобы посмотреть превосходное видео, показывающее движение оперения и автомата перекоса на реальном вертолете. Хлопанье В отличие от растушевки, конструкции взмахов существенно различаются. Один из подходов состоит в том, чтобы добавить петлю створки к каждой лопасти, как показано на диаграмме ниже. Каждая лопасть поднимается/опускается независимо от других. Расстояние шарнира от центра вращения, называемое смещением шарнира , играет роль в динамике несущего винта и управляемости самолета. Обычно существует некоторое сопротивление взмахам пружины торсионного шарнира, что также играет роль в динамике ротора и управляемости. В этой статье содержится дополнительная информация о влиянии смещения шарнира и пружин закрылка на динамику ротора. Обратите внимание, что пружина закрылка не требуется — центробежные силы при вращении ротора автоматически вытягивают лопасти, укрощая движение закрылков. Однако какой-то тип стопор закрылков или статический стопор необходим для ограничения взмахов, когда ротор не вращается на полной скорости или в других случаях испытывает экстремальные взмахи. Шарнир закрылка, описанный выше, может быть перекошен так, что он естественным образом наклоняет носовую часть лопасти вниз, когда закрылки поднимаются. Уменьшает угол атаки и, следовательно, поднимает лопасть при взмахе, обеспечивая пассивный механизм ограничения взмахов. Эту конструкцию часто называют треугольной петлей 3 или треугольной петлей 9.0228 . Эти шарниры чаще используются на хвостовых винтах — уменьшенный маховый угол позволяет устанавливать их ближе к хвостовой балке. Нажмите здесь, чтобы увидеть видео настоящего рулевого винта с треугольным шарниром. Поскольку преобладающее движение закрылков составляет 1/об, двухлопастные роторы могут быть изготовлены только с одним «шарниром закрылков» в центре ротора, так что две лопасти будут колебаться вместе как единое целое вокруг этого шарнира. Когда одно лезвие поднимается, другое опускается. Это называется качающимся ротором и ведет себя как детские качели, как показано на диаграмме ниже. Петля называется качающейся петлей. Балансирующий ротор может также иметь конусный шарнир и нижний строп . Конусообразный шарнир дополнительно снимает нагрузку на основание лопасти при взмахах, давая каждой лопасти свой собственный шарнир, как описано выше. Это в первую очередь снимает конические напряжения, но также может помочь при любом другом движении закрылков, отличном от 1/оборот. Шарнир качания не может снять конические напряжения, потому что он должен откидывать лопасти в противоположном направлении (1 вверх, 1 вниз), в то время как конусность состоит из всех лопастей, откидываемых вверх на одинаковую величину. Нижняя подвеска уменьшает эффект Кориолиса, из-за которого лезвия опережают/отстают. Это достигается размещением шарнира качания над лопастями, как показано на схеме ниже. Когда лопасть поднимается вверх и ее центр тяжести смещается к ступице, основание лопасти эффективно отталкивается от ступицы. Ниже мы проведем быстрый расчет, чтобы продемонстрировать уменьшение сил Кориолиса. Предположим, что ротор работает с углом конусности \(\beta\) с циклическим взмахом \(+/- a\) при 1/об. Пусть \(r\) обозначает расстояние центра масс лопасти (ЦМ) от корня и количество нижнего стропа равно \(\lambda r\). Когда лопасть взмахивает, ее центр масс по-прежнему перемещается от \(r\cos\beta\) к \(r\cos (\beta+a)\) по направлению к основанию лопасти, но основание отходит от вала на сумма \(\lambda r \sin a\). Таким образом, движение КМ без подкоса равно \(\delta = r\cos\beta — r\cos (\beta+a)\), а движение с подкосом равно \(\delta — \lambda r \sin a\) . Таким образом, если есть 2-градусный конус, 3-градусное колебание и понижение \(r/20\), то \(1-\frac{\delta-\lambda r\sin a}{\delta} \приблизительно 82\)% CM движение было устранено стропой. Последний откидной механизм, который мы здесь обсудим, представляет собой бесшарнирную или жесткую конструкцию. Лезвие крепится непосредственно к ступице, но содержит гибкий материал возле корня, который действует как «виртуальный шарнир щитка». |
 Конструкция несущего винта уравновешивает множество противоречивых целей и ограничений. Примеры включают минимизацию затрат, максимальную производительность и поддержание вибрации и шума ниже пороговых значений. В этой статье мы рассмотрим некоторые основы конструкции несущего винта вертолета.
Конструкция несущего винта уравновешивает множество противоречивых целей и ограничений. Примеры включают минимизацию затрат, максимальную производительность и поддержание вибрации и шума ниже пороговых значений. В этой статье мы рассмотрим некоторые основы конструкции несущего винта вертолета. Это может предотвратить приземление в определенных местах из-за риска повреждения конструкций и растительности. По этой причине V-22 не использовался в нескольких миссиях.
Это может предотвратить приземление в определенных местах из-за риска повреждения конструкций и растительности. По этой причине V-22 не использовался в нескольких миссиях. Подробнее об этом см. в нашей статье по теории импульса, в которой выводятся соответствующие уравнения.
Подробнее об этом см. в нашей статье по теории импульса, в которой выводятся соответствующие уравнения. Чрезмерная вибрация может привести к аварии со смертельным исходом из-за поломки важных компонентов в полете. Разработчики должны тщательно ограничивать вибрацию.
Чрезмерная вибрация может привести к аварии со смертельным исходом из-за поломки важных компонентов в полете. Разработчики должны тщательно ограничивать вибрацию.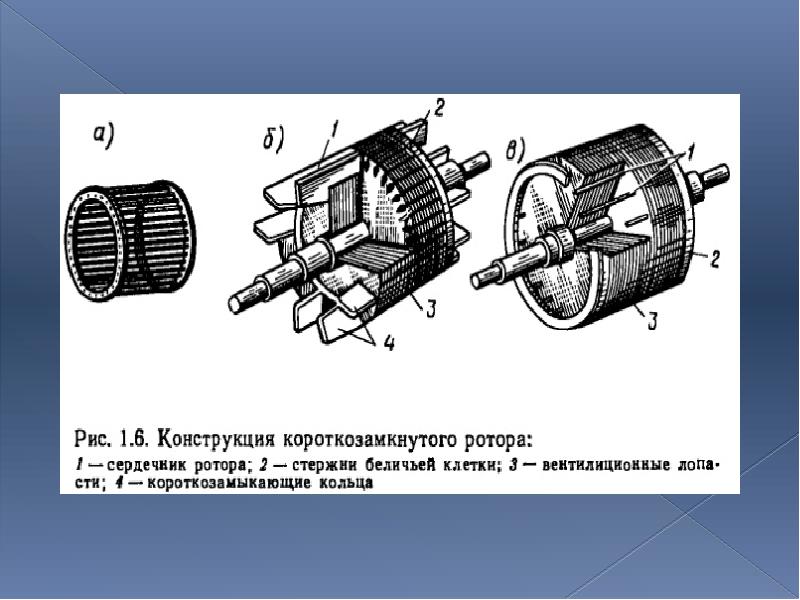 Это связано с тем, что жесткость зависит от квадрата хорды. Следовательно, разработчик вынужден работать с «более гибким лезвием» или увеличивать стоимость для достижения жесткости более крупного лезвия.
Это связано с тем, что жесткость зависит от квадрата хорды. Следовательно, разработчик вынужден работать с «более гибким лезвием» или увеличивать стоимость для достижения жесткости более крупного лезвия.
 Существует предел, около 200 узлов, при котором никакая скорость несущего винта не может удовлетворить обоим критериям. Это показано пересекающимися линиями на диаграмме ниже. Нецелесообразно летать на традиционном вертолете выше этой скорости.
Существует предел, около 200 узлов, при котором никакая скорость несущего винта не может удовлетворить обоим критериям. Это показано пересекающимися линиями на диаграмме ниже. Нецелесообразно летать на традиционном вертолете выше этой скорости. Обычно испытания CFD и аэродинамической трубы проводятся для определения коэффициентов подъемной силы и сопротивления аэродинамических поверхностей в зависимости от угла атаки. Эти значения будут активно использоваться в процессе проектирования (трехмерного) лезвия.
Обычно испытания CFD и аэродинамической трубы проводятся для определения коэффициентов подъемной силы и сопротивления аэродинамических поверхностей в зависимости от угла атаки. Эти значения будут активно использоваться в процессе проектирования (трехмерного) лезвия.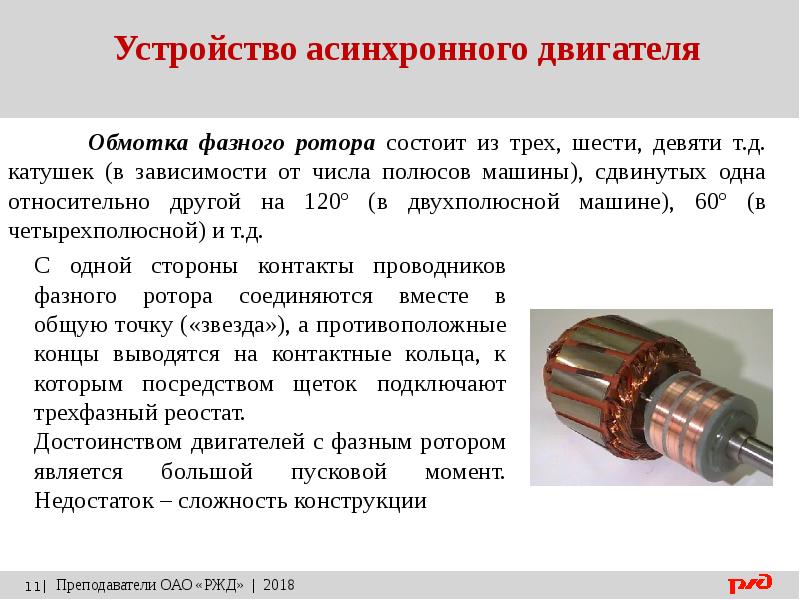
 Большинство конструкций не являются ни квадратными, ни оптимальными по производительности; компромиссы приводят к чему-то среднему.
Большинство конструкций не являются ни квадратными, ни оптимальными по производительности; компромиссы приводят к чему-то среднему. Оптимальный поворот потребует 90-градусный (вертикальный) аэродинамический профиль в основании и непрактичен, поэтому снова компромисс приводит к некоторому скручиванию, но не к оптимальному скручиванию. Для простоты многие вертолеты используют линейную крутку — угол изменяется линейно в зависимости от размаха. См. приведенную ниже диаграмму, на которой показаны поперечные сечения лопасти на расстоянии 5 футов и 15 футов от центра ротора. Внешняя секция движется в 3 раза быстрее и, следовательно, угол натекания примерно на 10 градусов меньше (расчеты предполагают 320 об/мин).
Оптимальный поворот потребует 90-градусный (вертикальный) аэродинамический профиль в основании и непрактичен, поэтому снова компромисс приводит к некоторому скручиванию, но не к оптимальному скручиванию. Для простоты многие вертолеты используют линейную крутку — угол изменяется линейно в зависимости от размаха. См. приведенную ниже диаграмму, на которой показаны поперечные сечения лопасти на расстоянии 5 футов и 15 футов от центра ротора. Внешняя секция движется в 3 раза быстрее и, следовательно, угол натекания примерно на 10 градусов меньше (расчеты предполагают 320 об/мин). Точно так же внешняя часть лопасти создает больший крутящий момент на единицу длины, который должен преодолевать двигатель. Это подводит нас к нашей последней теме о форме лезвия — форме кончика.
Точно так же внешняя часть лопасти создает больший крутящий момент на единицу длины, который должен преодолевать двигатель. Это подводит нас к нашей последней теме о форме лезвия — форме кончика. Примеры включают Black Hawk компании Sikorsky и AW101 компании Westland. Для получения дополнительной информации о них проверьте программу BERP.
Примеры включают Black Hawk компании Sikorsky и AW101 компании Westland. Для получения дополнительной информации о них проверьте программу BERP. В отличие от большинства компонентов, конструкции ступиц сильно различаются между вертолетами, даже на фундаментальном уровне. Например, некоторые конструкции, такие как качающиеся несущие винты, хорошо подходят для вертолетов с двумя лопастями, но неприменимы для несущих винтов с более чем двумя лопастями. Втулки имеют общие цели, такие как удержание лопастей прикрепленными к валу, позволяя им флюгировать, взмахивать и иногда опережать/отставать. Прежде чем обсуждать дизайн концентратора, мы рассмотрим эти цели более подробно.
В отличие от большинства компонентов, конструкции ступиц сильно различаются между вертолетами, даже на фундаментальном уровне. Например, некоторые конструкции, такие как качающиеся несущие винты, хорошо подходят для вертолетов с двумя лопастями, но неприменимы для несущих винтов с более чем двумя лопастями. Втулки имеют общие цели, такие как удержание лопастей прикрепленными к валу, позволяя им флюгировать, взмахивать и иногда опережать/отставать. Прежде чем обсуждать дизайн концентратора, мы рассмотрим эти цели более подробно. Хлопание представляет собой вертикальное движение лопасти относительно ступицы и показано на рисунке ниже. Концентратор может способствовать взмахам несколькими различными способами, которые мы вскоре опишем. Замахивание позволяет направить тягу несущего винта вперед, назад или даже вбок для создания моментов крена и тангажа. Хлопание также может (более непосредственно) вызывать моменты тангажа или крена через смещенный шарнир закрылка или ограничитель ступицы. Эти эффекты изменяют положение, скорость и направление полета вертолета. См. эту страницу для получения дополнительной информации о том, как вертолет управляется с помощью флюгирования и взмахов ротора.
Хлопание представляет собой вертикальное движение лопасти относительно ступицы и показано на рисунке ниже. Концентратор может способствовать взмахам несколькими различными способами, которые мы вскоре опишем. Замахивание позволяет направить тягу несущего винта вперед, назад или даже вбок для создания моментов крена и тангажа. Хлопание также может (более непосредственно) вызывать моменты тангажа или крена через смещенный шарнир закрылка или ограничитель ступицы. Эти эффекты изменяют положение, скорость и направление полета вертолета. См. эту страницу для получения дополнительной информации о том, как вертолет управляется с помощью флюгирования и взмахов ротора.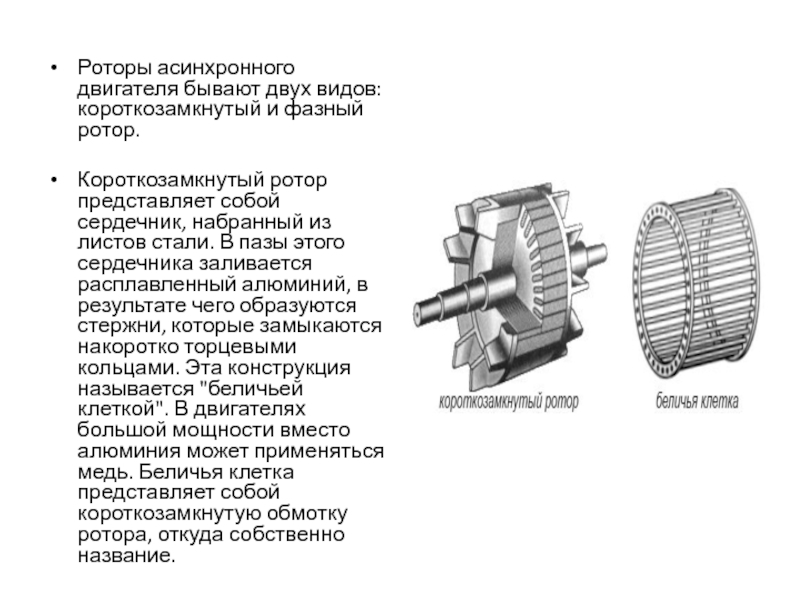 Это оказывает значительное, высокочастотное, периодическое напряжение на лопасти. Вместо того, чтобы усиливать лезвие, чтобы справиться с этим напряжением, часто более эффективно позволить лезвиям двигаться в этом направлении «опережение/отставание» в некоторой степени.
Это оказывает значительное, высокочастотное, периодическое напряжение на лопасти. Вместо того, чтобы усиливать лезвие, чтобы справиться с этим напряжением, часто более эффективно позволить лезвиям двигаться в этом направлении «опережение/отставание» в некоторой степени.
 Нажмите здесь, чтобы увидеть анимацию оперения лопастей и связанного с ними движения автомата перекоса.
Нажмите здесь, чтобы увидеть анимацию оперения лопастей и связанного с ними движения автомата перекоса.


