
Рулевые машины лопастные, электрогидравлические и с винтовым приводом
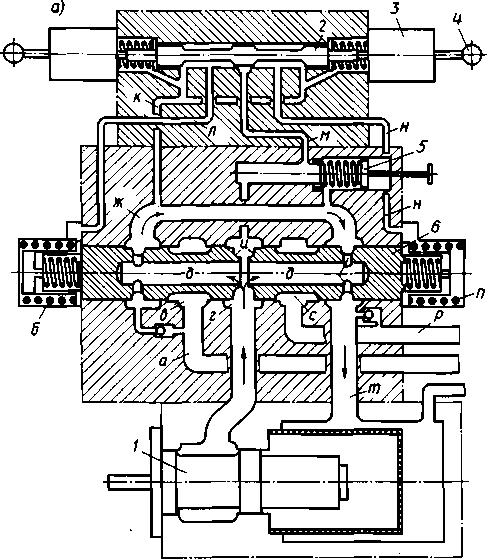
Лопастная электрогидравлическая рулевая машина (рис. 5, а) состоит из следующих узлов: рулевой тумбы 1 со штурвалом и теледвигателем, трубопровода 2, клапана остановки 3, насоса регулируемой производительности 4 с электродвигателем 5, контактора 6 для пуска электродвигателя, лопастного гидродвигателя 7 и главной распределительной коробки 8. Ротор гидромотора (рис. 5, б), имеющий лопасти, непосредственно соединяется с баллером руля, а лопасти располагаются между неподвижными сегментами, образуя полости, в которые насосом 4 через каналы 10 и кольцевой зазор 9 нагнетается рабочая жидкость под давлением 4500—5000 кН/м2 (45—50 кгс/см2). Эта жидкость создает давление на лопасти, обеспечивая необходимый вращающий момент на баллере. Поворот руля на левый или правый борт зависит от направления подачи рабочей жидкости (масла) к гидродвигателю, который крепится к судовому фундаменту основанием 11.
Рис. 5. Схема лопастной электрогидравлической рулевой машины.
Рис. 6. Схема рулевой машины с винтовым приводом.
Рулевая машина с винтовым приводом показана на рис. 6. Привод состоит из вала 16, имеющего правую и левую нарезку. При вращении вала ползуны 8 и 15, имеющие соответствующую резьбу, перемещаются в разные стороны, скользя вдоль неподвижных направляющих 9 и 14. Тягами 6 и 7 ползуны соединены с концами румпеля 5, насаженного на баллер 2. Направляющие 9 и 14 своими концами входят в отверстия передней 17 и задней 18 стоек и закрепляются гайками. Вал 16 приводится во вращение червяком 12 через червячное колесо 11 и пару цилиндрических шестерен 10 и 13. Если при вращении вала 16 ползун 15 переместится вправо, то ползун 8 передвинется влево и руль будет перекладываться на правый борт. При обратном вращении вала ползуны 8 я 15 разойдутся и руль переложится на левый борт. Удержание руля в определенном положении осуществляется тягой 1 тормозного диска 3 и тормозной ленты 4.
Вопросы для повторения
1. Опишите конструкцию и принцип работы пароручной рулевой машины.
2. Расскажите об общем устройстве электрогидравлической рулевой машины.
3. Как работает насос переменной производительности?
4. Расскажите о конструкции привода к баллеру руля электрогидравлической рулевой машины.
5. Как работает лопастная электрогидравлическая рулевая машина?
6. Как устроен винтовой привод рулевой машины?
Классификация и конструкции электрогидравлических рулевых машин
Электрогидравлические рулевые машины, помимо насосного агрегата рулевого гидропривода, имеют следующие основные узлы: систему управления насосами регулируемой подачи (или органы распределения рабочей жидкости — золотник для машин с насосами постоянной подачи), клапанные коробки и систему трубопроводов питания; предохранительные клапаны, компенсаторы динамических нагрузок, усилители, а также ограничители мощности и другие элементы.
Электрогидравлические рулевые машины классифицируют по следующим признакам:
— по роду энергии, используемой для приведения в действие насосного агрегата, на электро- и парогидравлические;
— по способу управления распределительными органами или насосами, приводом или рулем — на машины с простой или следящей системой управления распределительными органами, приводом и рулем. При наличии простой системы управления для поворота руля производятся отдельные операции по включению машины и ее выключению при достижении рулем необходимого угла перекладки.
 При следящей системе управления каждому углу поворота задающего органа (например, штурвала) соответствует пропорциональный по величине и согласованный по направлению угол поворота руля, который автоматически останавливается в заданном положении;
При следящей системе управления каждому углу поворота задающего органа (например, штурвала) соответствует пропорциональный по величине и согласованный по направлению угол поворота руля, который автоматически останавливается в заданном положении;— по конструкции рулевого привода — на машины с нормальным плунжерным (двух- или четырехцилиндровым) приводом, плунжерным с секторно-кольцевыми плунжерами, лопастным (двух- и трехкрыльчатыми) и др.;
Электрогидравлические рулевые машины могут иметь и другие особенности: гидроусилители (первого и второго каскада).
Аксиально-поршневые насосы типа 11Д нашли распространение в связи с применением их в последних унифицированных гидравлических рулевых машинах серии «Р». Конструкции отечественных плунжерных электрогидравлических рулевых машин разработаны под руководством инженеров В. Д. Гаврилова, И. С. Клячко, К К Воробьева, А. А. Тараканова и других. Характеристики электрогидравлических рулевых машин приводятся после рассмотрения конструкций машин. На рис. 73 приведена четырехплун-жерная электрогидравлическая рулевая машина с ра-диально-поршневым насосом регулируемой подачи, управляемым при помощи пускового электродвигателя или телемотора, передвигающего тягу рычажной системы управления (возможные направления передвижения показаны стрелками). Таким образом, при вращении штурвала точка d рычажного сервомотора переместится в положение d“ в связи с поворотом вокруг точки с (которая является неподвижной при неработающей машине). Точка b рычага также переместится вправо в точку. Так как цапфа насоса шарнирно подсоединена к точке Ь, то последняя переместится вправо в положение, изображенное на рис. 73, в. Включение в действие насоса вызывает всасывание рабочей жидкости из цилиндров и нагнетание ее в цилиндры II и III. Плунжеры переместятся влево, что вызовет поворот поперечины румпеля по часовой стрелке. Если на мостике прекращено вращение штурвала, то перемещение плунжеров поставит рычаг в положение, благодаря чему регулировочное кольцо насоса будет возвращено в среднее положение и подача насоса будет выключена.
Характеристики электрогидравлических рулевых машин приводятся после рассмотрения конструкций машин. На рис. 73 приведена четырехплун-жерная электрогидравлическая рулевая машина с ра-диально-поршневым насосом регулируемой подачи, управляемым при помощи пускового электродвигателя или телемотора, передвигающего тягу рычажной системы управления (возможные направления передвижения показаны стрелками). Таким образом, при вращении штурвала точка d рычажного сервомотора переместится в положение d“ в связи с поворотом вокруг точки с (которая является неподвижной при неработающей машине). Точка b рычага также переместится вправо в точку. Так как цапфа насоса шарнирно подсоединена к точке Ь, то последняя переместится вправо в положение, изображенное на рис. 73, в. Включение в действие насоса вызывает всасывание рабочей жидкости из цилиндров и нагнетание ее в цилиндры II и III. Плунжеры переместятся влево, что вызовет поворот поперечины румпеля по часовой стрелке. Если на мостике прекращено вращение штурвала, то перемещение плунжеров поставит рычаг в положение, благодаря чему регулировочное кольцо насоса будет возвращено в среднее положение и подача насоса будет выключена.
Если в какой-либо паре цилиндров, например I и IV, от удара волны повысится давление выше допустимого, то клапан устройства откроется и перепустит масло в цилиндры II и III. Рычаг dbc займет положение, и насос, включаясь автоматически в действие (без участия рулевого), вернет руль в положение, которое он занимал до воздействия повышенной внешней нагрузки. Для различных электрогидравлических рулевых машин подрыв клапанов устройства происходит при давлении, превышающем наибольшее рабочее на 5—10%. В рассматриваемом типе машин поворот руля на 5—10° при неподвижном штурвале сдвигает регулировочное кольцо и блок цилиндров насоса до упора, на величину максимального эксцентриситета.
Недостатком рычажных систем управления насосами является невозможность использования полной подачи насосов.
Четырехцилиндровый плунжерный привод позволяет при эксплуатации машины осуществлять различные варианты переключения и производить замену уплотнений любых цилиндров без выключения рулевой машины. На рис. 74 приведена схема гидравлической рулевой машины с лопастным приводом типа РЭГ ОВИМУ-7. Эта машина разработана научно-исследовательским сектором Одесского высшего инженерного морского училища в двух вариантах, отличающихся различным конструктивным выполнением золотниково-распределительного устройства. Лопастной гидравлический привод в этой машине устанавливается непосредственно на баллере руля, что уменьшает ее габаритные размеры и позволяет вести монтажные и модернизационные работы, не выводя судно из эксплуатации.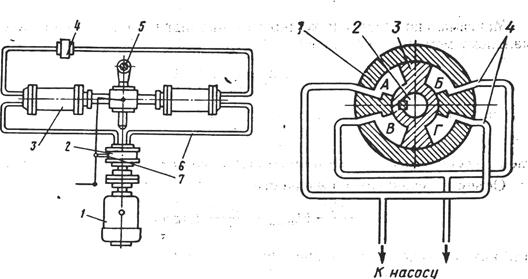
Питание привода осуществляется лопастным насосом Г12-14 (ЛЗФ-70) постоянной подачи 73 л/мин с частотой вращения 1000 об/мин и мощностью 5,6 кВт.
Гидравлическая рулевая машина работает при давлении рабочей жидкости 40 кгс/см2. Она состоит из рабочего цилиндра, лопастного насоса с электродвигателем, золотниково-распределительного устройства, сдвоенного перепускного клапана привода, предохранительного клапана 8 насоса, пружинного буферного колпака, бака для рабочей жидкости и системы рычагов управления.
При среднем положении золотника, как показано на рис. 74, работа насоса вызовет лишь циркуляцию рабочей жидкости по кольцу в направлении, указанном пунктирными стрелками. При этом жидкость, нагнетаемая насосом под золотник, возвращается в трубопровод через правое верхнее отверстие корпуса золотниковой коробки. При вращении штурвала, находящегося в рулевой рубке, например, в правую сторону каретка телемотора перемещается вправо (в нос) в направлении, указанном сплошными стрелками, в результате чего шток золотника перемещается вправо вместе с ним.
Рис. 1. Схема РЭГ ОВИМУ-7
При нагнетании жидкости в две диаметрально противоположные полости цилиндра вал с крыльями и баллер руля поворачиваются в данном случае против часовой стрелки. Поворот баллера вызовет перемещение рычага сервомотора (обратная связь), при этом рычаг поворачивается и смещает золотник до тех пор, пока закроются окна золотниковой коробки, а кулачковое устройство станет в первоначальное положение. Давление рабочей жидкости на кольцевую поверхность разгрузочного золотника совпадает с направлением действия пружин, в результате чего этот золотник сместится и откроет канал а, вследствие чего возобновится циркуляция жидкости по кольцу, указанному пунктирными стрелками. В результате руль останется в переложенном на борт положении и показания аксиометра будут соответствовать ранее заданному углу перекладки. Можно проследить по схеме, что при вращении штурвала в левую сторону баллер повернется по часовой стрелке.
Давление рабочей жидкости на кольцевую поверхность разгрузочного золотника совпадает с направлением действия пружин, в результате чего этот золотник сместится и откроет канал а, вследствие чего возобновится циркуляция жидкости по кольцу, указанному пунктирными стрелками. В результате руль останется в переложенном на борт положении и показания аксиометра будут соответствовать ранее заданному углу перекладки. Можно проследить по схеме, что при вращении штурвала в левую сторону баллер повернется по часовой стрелке.
Фиксатор с пружиной предназначен для уменьшения ошибки между показаниями аксиометра и действительным положением пера руля. Фиксатор не позволяет золотнику открыть окно а до полного закрытия золотником окон, т. е. до установления руля на заданный угол. В рабочем положении системы, когда происходит перекладка руля и золотник, закрывая окно а, находится в правом положении, фиксатор под действием пружины находится в нижнем положении, вследствие чего кольцевая торцевая поверхность золотника не испытывает давления, так как объем над ней соединен каналом К с отливной полостью. К концу маневра, когда в связи с прикрытием золотником окон давление в системе возрастает, фиксатор поднимается, преодолев давление пружины, и соединяет каналы полости высокого давления золотникового устройства с каналами, идущими к кольцевой поверхности, обеспечивая повышение давления на торцевую кольцевую поверхность золотника. Сила, образовавшаяся от давления на эту поверхность и совпадающая с ней по направлению действия пружины золотника, сместит его в первоначальное (допусковое) положение; окно а откроется, и давление в системе снизится.
К концу маневра, когда в связи с прикрытием золотником окон давление в системе возрастает, фиксатор поднимается, преодолев давление пружины, и соединяет каналы полости высокого давления золотникового устройства с каналами, идущими к кольцевой поверхности, обеспечивая повышение давления на торцевую кольцевую поверхность золотника. Сила, образовавшаяся от давления на эту поверхность и совпадающая с ней по направлению действия пружины золотника, сместит его в первоначальное (допусковое) положение; окно а откроется, и давление в системе снизится.
Устройство фиксатора обеспечивает также разгрузку нагнетательной сети трубопровода при недопустимом повышении давления, выполняя в этом случае функции предохранительного клапана, хотя схемой предусматривается специальный предохранительный клапан, который срабатывает в случае заклинивания золотника (в эксплуатации случаев заклинивания не наблюдалось).
Описанная конструкция золотников распределительного устройства обеспечивает начало перекладки руля при перемещении распределительного золотника на 3 мм и смещении разгрузочного золотника на 7 мм. Начало перекладки руля происходит при смещении каретки телемотора на 6 мм, что соответствует повороту штурвала на 90°. Заданный поворот штурвала может быть уменьшен за счет удлинения толкателя разгрузочного золотника при регулировании системы путем вывинчивания его из развилки. При этом первоначальное живое сечение перепускного окна а уменьшится и потребуется меньший ход разгрузочного золотника до начала прекладки руля.
Начало перекладки руля происходит при смещении каретки телемотора на 6 мм, что соответствует повороту штурвала на 90°. Заданный поворот штурвала может быть уменьшен за счет удлинения толкателя разгрузочного золотника при регулировании системы путем вывинчивания его из развилки. При этом первоначальное живое сечение перепускного окна а уменьшится и потребуется меньший ход разгрузочного золотника до начала прекладки руля.
Распределительный золотник обеспечивает полное открытие окон при повороте штурвала на 1,5 оборота. При повороте штурвала на 40—60° окна открываются на 1—1,5 мм и насос перекачивает жидкость в цилиндр со скоростью 15 м/с. Чувствительность установок может быть повышена за счет уменьшения ширины окна а при определенном изменении золотника. В последней модели рулевой машины ее пуск осуществляется за 0,1 с.
Сервомотор обеспечивает работу машин и в том случае, когда в процессе перекладки руля удар волны (или другое внешнее воздействие) заставит сработать механизм возврата золотника, так как при этом руль несколько отклонится и своим движением посредством сервомотора снова закроет окно а, после чего поворот руля будет продолжаться до заданного угла перекладки.
Рулевая машина, предложенная В. В. Завишей, имеет вращающий момент на баллере при работе РЭГ-ОВИМУ-7 7—8 тс-м, наибольшее давление, развиваемое насосом, не превышает 65 кгс/см2. Сухая масса машины (с одним комплектом оборудования) — 1600 кг. На рис. 75 приведена схема РЭГ с валиковой системой управления насосами переменной производительности. Такая машина, с четырехплунжерным рулевым приводом и двумя насосами НРП, имеет широкое распространение на отечественных серийных судах.
Управление машиной предусмотрено из румпельного отделения или с мостика. В первом случае вращение штурвала через цепную передачу, при выключенной кулачковой муфте, передается валику, через систему конических передач — задающим валикам 16. Муфта двусторонняя, каждое из положений ее переводного рычага фиксируется стопором.
Рис. 2. РЭГ с валиковой системой управления НПП
Конические шестерни задающих валиков, расположенные, как и все планетарное устройство, в корпусах кулачковых дифференциалов, вращают планетарные шестерни, которые, бегая по неподвижным (в первый момент) шестерням валиков обратной связи, наклоняют траверсы и закрепленные на них секторы С.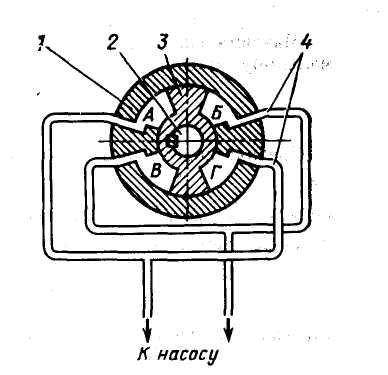 При наклоне секторов С их зубья (кулаки) выходят из впадин рычагов, в которых они находились, фиксируя среднее положение этих рычагов и нулевую подачу насосов, наклоняют рычаги и сидящие с ними на одной оси рычаги. При некотором наклоне рычагов ролики выходят из впадин колец, выкатываются
При наклоне секторов С их зубья (кулаки) выходят из впадин рычагов, в которых они находились, фиксируя среднее положение этих рычагов и нулевую подачу насосов, наклоняют рычаги и сидящие с ними на одной оси рычаги. При некотором наклоне рычагов ролики выходят из впадин колец, выкатываются
а их круглую поверхность, наклоняют рычаги на небольшой угол перемещают тяги, поворачивают рычаги относительно точки о и, смещая тягу, запускают насос на полную подачу. При перекладках руля на значительные углы и достаточно быстром вращении от штурвала валиков насосы будут развивать полную подачу, что является положительной особенностью валиковых систем с кулачковыми дифференциалами. Подача масла насосом или двумя насосами (если включены оба насоса) вызывает перемещение плунжеров привода, перекладку руля, перемещение реек и вращение шестерен, стоящих на валиках обратной связи. Вращение конических шестерен будет также воздействовать на планетарные шестерни в обратном направлении; при этом наклонение траверс приостановится.![]() При прекращении вращения штурвала валики и шестерни остановятся. Валики и шестерни вернут («отработают») траверсы, секторы С, всю систему рычагов и тяг к насосу в среднее положение. Пружины, оттягивающие скользящие блоки насосов в среднее положение, обеспечат совпадение впадины рычагов с зубьями секторов С и попадание роликов в выемки К.
При прекращении вращения штурвала валики и шестерни остановятся. Валики и шестерни вернут («отработают») траверсы, секторы С, всю систему рычагов и тяг к насосу в среднее положение. Пружины, оттягивающие скользящие блоки насосов в среднее положение, обеспечат совпадение впадины рычагов с зубьями секторов С и попадание роликов в выемки К.
Таким образом, при управлении штурвалом каждому углу поворота штурвала соответствует определенный наклон траверс, определенное перемещение плунжеров привода, возвращающее их в исходное положение, и определенный угол поворота руля, т. е. рулевая машина в этом случае работает по принципу следящих систем.
Чтобы контролировать положения руля, рулевой может пользоваться обычным механическим аксиометром, связанным с валом штурвала. Для управления машиной с мостика применяется простая (неследящая) электрическая система телеуправления. В этом случае муфта 3 подключается к трубчатому валику муфты Федорицкого. При повороте штурвала на мостике в какую-либо сторону из среднего положения включается сначала первая, затем вторая, а в некоторых конструкциях и третья наибольшая скорости мотора дистанционного управления (работает только один мотор, второй является резервным). От мотора дистанционного управления вращается одна из червячных шестерен, которая внутренним коническим ободом приводит во вращение планетарные шестерни, бегающие по неподвижному коническому ободу второй шестерни, в результате чего вращаются крестовина и трубчатый вал. Последний посредством муфты вращает валик, который через системы конических пар передает вращение валикам. В дальнейшем включение подачи насоса и выключение ее обратной связью (отработкой) осуществляется так же, как и при управлении штурвалом.
От мотора дистанционного управления вращается одна из червячных шестерен, которая внутренним коническим ободом приводит во вращение планетарные шестерни, бегающие по неподвижному коническому ободу второй шестерни, в результате чего вращаются крестовина и трубчатый вал. Последний посредством муфты вращает валик, который через системы конических пар передает вращение валикам. В дальнейшем включение подачи насоса и выключение ее обратной связью (отработкой) осуществляется так же, как и при управлении штурвалом.
Нижняя часть корпуса муфты Федорицкого служит масляной ванной. Заливка масла производится через отверстие с пробкой в верхней части корпуса. Для контроля за уровнем масла и для его спуска в нижней части имеются нарезные отверстия с пробками. Смазка втулок, крестовины, ступиц, червячных колес, звездочки и вкладыша производится при помощи колпачковой масленки через отверстия в теле вала и крестовины.
Управляя машиной с мостика, рулевой по положению штурвала не знает о положении руля. Ему известно лишь направление перекладки. Поэтому, чтобы остановить руль в нужном положении, рулевой следит за стрелкой задающего аксиометра (приводится в действие от валиков цепной передачей) и при приближении последней к желаемому углу отклонения возвращает штурвал в среднее положение. При этом выключается мотор дистанционного управления. О точности выполнения маневра судят по положению стрелки исполнительного аксиометра, который тягой соединен с баллером. Расхождение показаний задающего и исполнительного аксиометров не должно превышать 2°.
Ему известно лишь направление перекладки. Поэтому, чтобы остановить руль в нужном положении, рулевой следит за стрелкой задающего аксиометра (приводится в действие от валиков цепной передачей) и при приближении последней к желаемому углу отклонения возвращает штурвал в среднее положение. При этом выключается мотор дистанционного управления. О точности выполнения маневра судят по положению стрелки исполнительного аксиометра, который тягой соединен с баллером. Расхождение показаний задающего и исполнительного аксиометров не должно превышать 2°.
Подача каждого насоса регулируемой подачи достаточна для перекладки руля с борта на борт за 25—28 с. Обычно в рейсе работает один из насосов.
Следует отметить, что наряду с некоторыми положительными качествами валиковых систем, например возможностью использования подачи насосов при перекладках руля на большие углы, им свойственны и некоторые недостатки: большая сложность и стоимость системы и, в частности, большие трудности в совместной регулировке и установке насосов на нулевую подачу при разном износе правого и левого участков валиковой системы. Необходимо, чтобы слабины на участках и износы соответствующих конических шестерен в коробках передач были одинаковыми. Поэтому следует следить за тем, чтобы наработка и условия работы правого и левого НРП были также одинаковыми. В этом случае при одновременной работе двух насосов во время прохождения узкостей и сложном маневрировании надежность работы рулевого устройства будет повышаться. Если же износы правой и левой частей системы разные и по этой или другой причине произошло рассогласование нейтральных положений скользящих блоков насосов, то подключение второго насоса не всегда повысит надежность системы и машины. Может случиться, что при наличии различных слабин в правом и левом участках валиковой системы регулировочное кольцо одного из насосов возвратится в среднее положение раньше второго. Последний, продолжая подавать масло в полости рулевого привода, обратной связью включит первый насос на подачу в противоположном направлении. Тогда пуск второго насоса может вызвать нагревание масла, удары и шум в системе.
Необходимо, чтобы слабины на участках и износы соответствующих конических шестерен в коробках передач были одинаковыми. Поэтому следует следить за тем, чтобы наработка и условия работы правого и левого НРП были также одинаковыми. В этом случае при одновременной работе двух насосов во время прохождения узкостей и сложном маневрировании надежность работы рулевого устройства будет повышаться. Если же износы правой и левой частей системы разные и по этой или другой причине произошло рассогласование нейтральных положений скользящих блоков насосов, то подключение второго насоса не всегда повысит надежность системы и машины. Может случиться, что при наличии различных слабин в правом и левом участках валиковой системы регулировочное кольцо одного из насосов возвратится в среднее положение раньше второго. Последний, продолжая подавать масло в полости рулевого привода, обратной связью включит первый насос на подачу в противоположном направлении. Тогда пуск второго насоса может вызвать нагревание масла, удары и шум в системе. Наибольшая температура масла в машине не должна превышать 70 °С.
Наибольшая температура масла в машине не должна превышать 70 °С.
Для установки регулировочных колец (скользящих блоков) НРП в среднее положение на их опорных цапфах делают метки, совпадение которых со стрелками на корпусах соответствует нулевой подаче. Одновременное совпадение этих меток для правого и левого насосов является обязательным условием возможности их совместной работы, за чем следует следить в период эксплуатации РЭГ. Если насосы правого
левого участков валиковой системы и передач одинаковы, то регулировкой длин тяг можно достигнуть совмещения меток и согласованной работы насосов. В рычажных системах точное согласование параллельной работы и устранение неодинакового износа правого и левого участков достигается относительно легче: райберовкой отверстий с установкой новых соединительных пальцев рычагов.
Рис. 3. Схема рулевого устройства с гидроусилителями к НПП:
1 — ведущая шестерня; 2 —зубчатые рейки; 3 — поршни датчика; 4 — импульсный трубопровод; 5, б — клапанные коробки; 7, 8, 9 — ползуны; 10 — шток; И — винт; 12 — тяга приемника телемотора; 13 — шток золотника; 14 — поршень гидроусилителя; 15 — эксцентриковое колесо НПП; 16 — рычаг; 17 — буферное пружинное устройство; 18 — тяга обратной связи; 19 — баллер;
На рис. 76 приведена схема рулевого устройства с включением гидроусилителей к НРП.
76 приведена схема рулевого устройства с включением гидроусилителей к НРП.
Для поворота руля, например, на правый борт рулевой поворачивает штурвал датчика телемотора вправо. При этом штурвал вращает шестерню, которая перемещает зубчатые рейки, соединенные со скалками плунжерных насосов, подающих рабочую жидкость (смесь воды и глицерина) по трубопроводу. Импульс передается приемнику телемотора, расположенному в рулевом отделении, через клапанную коробку (к приемнику телемотора левого или правого борта).
Переключение на тот или иной борт осуществляется с помощью стопора. Если, например, включен приемник правого борта, шток начинает перемещаться влево и через ползун передвигает тягу. Последняя через систему рычагов воздействует на штоки обоих золотников гидроусилителей. С помощью гидроусилителя слабый импульс датчика телемотора преобразуется в мощное усилие, достаточное для создания эксцентриситета в НРП.
Гидроусилитель состоит из золотника и силового цилиндра. При перемещении штока открывается окно а или в для прохода масла к поршню. Рабочая жидкость в гидроусилитель поступает от специального насоса, приводимого от вала НРП или от независимого привода. Движение поршня передается блоку насоса, в котором изменяется эксцентриситет, и начинается подача масла в цилиндры № 2 и 3. В результате руль перекладывается на правый борт. Как только румпель придет в движение, начинает перемещаться и тяга обратной связи, закрепленная на голове баллера. Тяга предназначена для выключения НРП при приходе руля в заданное положение. Тяга обратной связи перемещает всю систему рычагов управления НРП в направлении, обратном первоначальному движению.
Рабочая жидкость в гидроусилитель поступает от специального насоса, приводимого от вала НРП или от независимого привода. Движение поршня передается блоку насоса, в котором изменяется эксцентриситет, и начинается подача масла в цилиндры № 2 и 3. В результате руль перекладывается на правый борт. Как только румпель придет в движение, начинает перемещаться и тяга обратной связи, закрепленная на голове баллера. Тяга предназначена для выключения НРП при приходе руля в заданное положение. Тяга обратной связи перемещает всю систему рычагов управления НРП в направлении, обратном первоначальному движению.
Например, при перекладке руля на правый борт точка А закрепления тяги на румпеле движется в корму, что приводит в действие всю систему управления НРП. При этом точка Б тяги перемещается в нос ровно настолько, чтобы эксцентриситет в насосе стал равным нулю. Это значит, что для возвращения руля в диаметральную плоскость нужно вращать штурвал влево.
В этой системе необходимо обеспечить среднее положение поршней и золотников гидроусилителей при среднем положении скользящих блоков НРП и среднем положении штурвала.
В случае повреждения системы гидравлического телемотора предусмотрено управление РЭГ с помощью тумбы механического аварийного управления. При этом стопор приемника телемотора переставляют из положения I в положение II, присоединяя тем самым тягу к ползуну. Поворачивая штурвал аварийного управления, приводят в движение через конические передачи винт, по которому перемещается ползун и передвигает тягу и всю остальную систему управления НРП.
Некоторые электрогидравлические рулевые машины имеют аварийный насос регулируемой производительности. В случае выхода из строя основных НРП или повреждения системы электропитания судна рулевая электрогидравлическая машина приводится в
йствие аварийным НРП. В рулевом отделении устанавливают аоийный агрегат, состоящий из НРП с дизельным приводом. Дизель вращает НРП, который по специальному трубопроводу „ягнетает масло в цилиндры привода руля. Насосом управляют с помошыо маховика. Чтобы правильно выдерживать заданный необходимо знать, в каком положении находится руль. Для этого на голове баллера закреплена рейка, которая перемещается вместе с баллером. Ее движение передается электрическому датчику, который подает сигналы в посты управления, где установлены аксиометры. Стрелка аксиометра движется по циферблату, отградуированному в градусах поворота пера руля (от О
Для этого на голове баллера закреплена рейка, которая перемещается вместе с баллером. Ее движение передается электрическому датчику, который подает сигналы в посты управления, где установлены аксиометры. Стрелка аксиометра движется по циферблату, отградуированному в градусах поворота пера руля (от О
Рис. 4. Принципиальная схема блока ПУ1-2
1 — электродвигатель; 2 — шестеренчатый насос; 3 — масляная цистерна; 4 — золотник- 5 — цилиндр первого каскада; 6 – поршень; 7 — рычаг обратной связи; 8 — регулировочный винт; 9 — тяга А; 10 — ось подвеса рычага связи; 11 — рычаг В; 12 — тяга Б; 13 — дифференциальный рычаг
до 40°). Кроме того, на тумбе датчика гидравлического телемотора имеется стрелка, которая показывает, на какой приблизительно угол должен повернуться руль при повороте штурвала. Наконец, на приводе баллера закреплена планка со шкалой, отградуированной в градусах поворота руля. Над этой шкалой движется стрелка, соединенная с ползуном плунжера и указывающая по шкале угол поворота руля. В румпельном помещении имеется механический показатель положения пера руля, состоящий из рычагов и шестерен, передающих движение румпеля стрелке. Последняя, вращаясь, отмечает на циферблате угол поворота руля.
В румпельном помещении имеется механический показатель положения пера руля, состоящий из рычагов и шестерен, передающих движение румпеля стрелке. Последняя, вращаясь, отмечает на циферблате угол поворота руля.
На танкерах типа «София» водоизмещением 62 560 т установлена рулевая машина РЭГ4, которая имеет два каскада гидравлического усиления механизма управления НРП, что связано с большей мощностью машины и необходимостью большего усилия для перемещения регулировочного кольца (скользящего блока). Управление машиной осуществляется с одного из двух внешних постов или непосредственно из румпельного отделения. От сельсинов-датчиков, находящихся в посту управления, импульс воспринимается сельсинами-приемниками, имеющимися в приборе ПУ1-2. Принципиальная схема прибора ПУ1-2 показана на рис. 77. Являясь первичным каскадом гидроусилителя, прибор ПУ1-2 использует импульс сельсина-приемника усилием около 50 гс и обеспечивает перемещение золотника, чем открывает доступ масла в цилиндр первого каскада усиления. Под давлением масла (8 ли кгс/см ) подаваемого шестеренчатым насосом, поршень в ци-ндре первого каскада перемещается и своим штоком сдвигает из среднего положения золотник второго каскада усиления (усилие около 40 кгс/см2). При движении поршень цилиндра первого каскада усиления поворачивает рычаг обратной связи относительно точки А и возвращает золотник в среднее положение.
Под давлением масла (8 ли кгс/см ) подаваемого шестеренчатым насосом, поршень в ци-ндре первого каскада перемещается и своим штоком сдвигает из среднего положения золотник второго каскада усиления (усилие около 40 кгс/см2). При движении поршень цилиндра первого каскада усиления поворачивает рычаг обратной связи относительно точки А и возвращает золотник в среднее положение.
Золотники гидроусилителей позволяют изменять направление потока масла в системе гидроусилителя и тем самым — направление движения цапф регулировочного кольца (скользящего блока) насоса в необходимом направлении. Гидроусилитель второго каскада создает усилие в 2400 кгс, достаточное для преодоления сопротивления при перемещении скользящего блока НРП этой рулевой машины. Гидроусилитель второго каскада устроен так же, как и гидроусилитель на рис. 77. Механизм управления насосами обеспечивает раздельное и одновременное управление насосами как из дистанционных постов, так и штурвалом ручного управления. С механизмом управления связан датчик электрических указателей. Переключением клапанов на клапанной коробке (системы главного масляного трубопровода) возможно отключение любого насоса и любой пары смежных или соосных цилиндров привода к баллеру в случае аварии.
Переключением клапанов на клапанной коробке (системы главного масляного трубопровода) возможно отключение любого насоса и любой пары смежных или соосных цилиндров привода к баллеру в случае аварии.
Для уменьшения нагрузок насосов и моторов применяются ограничители мощности. При повышении давления они уменьшают величину эксцентриситета насосов, что достигается ограничением возможного наклона рычагов. Если в одной из полостей насоса регулируемой подачи, соединенной с ограничителем мощности трубками, давление поднимается до 65% наибольшего рабочего давления, то поршень одного из крайних цилиндров ограничителя, например, пойдет вниз, сообщит посредством кольцевой выточки трубки и перекроет трубку.
Рис. 5. Ограничитель мощности
Рис. 6. Общий вид рулевой машины Р-Н и Р-13
По конструктивным признакам и комплектующему оборудованию эти электрогидравлические машины подразделяются на три группы:
— первая группа — машины Р01, РОЗ, Р05, Р07, РОЭ имеют двухцилиндровый плунжерный привод и один насос постоянной подачи;
— вторая группа — машины Р11, Р13 имеют также двухцилиндровый привод с соосным расположением цилиндров и двумя насосами регулируемой подачи;
— третья группа — машины Р15, Р16, Р17, Р18, Р19, Р21, Р22 имеют четырехцилиндровый привод и два насоса регулируемой подачи.
В состав насосного агрегата рулевых машин первой группы входят распределительный золотник, клапанная коробка, предохранительный клапан и фильтр. Все узлы насосного агрегата смонтированы на общей раме. Насосный агрегат устанавливается на судовом фундаменте отдельно от привода баллера. Имеется также аварийный ручной привод.
В рулевых машинах второй и третьей групп установлены аксиально-поршневые насосы типа 11Д, каждый из которых обеспечивает. спецификациоййую характеристику рулевой машины определенного типоразмера. Насос соединен с электродвигателем при помощи эластичной муфты и установлен на общей раме, к которой крепится также коробка предохранительных клапанов насосов. Эта рама устанавливается на цилиндрах привода баллера.
Рис. 7. Общий вид рулевой машины Р-15 и Р-22
Элементы гидравлической системы рулевых машин связаны между собой трубопроводами. Масляный трубопровод состоит из главного (соединяющего насосы с цилиндрами привода баллера через клапанные коробки) и вспомогательных трубопроводов, а также трубопровода манометров. Рулевые машины снабжены комплектом контрольно-измерительных приборов, обеспечивающих нормальную эксплуатацию.
Рулевые машины снабжены комплектом контрольно-измерительных приборов, обеспечивающих нормальную эксплуатацию.
Рулевые машины всех групп предназначены для перекладки одного руля. Машины с малым моментом на баллере предназначены для небольших судов смешанного плавания (река—море).
Ряд машин серии «Р» включает электрогидравлические рулевые машины типоразмеров и модификаций (машины на два руля). При этом типоразмеров ряда заменяют 36 типоразмеров электрогидравлических и электрических рулевых машин, находившихся до последнего времени в эксплуатации.
Система управления новыми рулевыми машинами электрическая дистанционная с электрической связью и обеспечивает три -вида управления: автоматическое (авторулевой), симпатическое (следящая система), простое дистанционное.
Электропривод насосов рулевых машин работает на переменном токе 380 В или постоянном токе 220 В.
Система дистанционного управления представляет собой сочетание электрических, механических и гидравлических элементов и наиболее полно отвечает требованиям эксплуатации. Исполнительный механизм системы управления в рулевых машинах первой группы воздействует на распределительный золотник и установлен на раме насосного агрегата; в рулевых машинах второй и третьей групп исполнительный механизм регулирует наклон цилиндрового блока насоса регулируемой подачи и размещается непосредственно на корпусе насоса.
Исполнительный механизм системы управления в рулевых машинах первой группы воздействует на распределительный золотник и установлен на раме насосного агрегата; в рулевых машинах второй и третьей групп исполнительный механизм регулирует наклон цилиндрового блока насоса регулируемой подачи и размещается непосредственно на корпусе насоса.
При разработке типизированной конструкции электрогидравлических рулевых машин значительное внимание было уделено унификации отдельных узлов и деталей, а также комплектующих изделий. Так, аксиально-поршневые насосы переменной производительности в рулевых машинах второй и третьей групп имеют единую кинематическую схему и отличаются только геометрическими размерами. В рулевых машинах Р11—Р15 использован насос только одного типоразмера — 11Д № 5, в машинах же Р17 и Р18 — насос 11Д № 20. Рулевые машины указанных групп имеют единую принципиальную схему трубопроводов, показанную на рис. 81. Полностью унифицирована для всего типизированного ряда система управления. Приводы баллера двухцилиндровых Р11 и Р13 и четырехцилиндровых рулевых машин Р15 и Р16 унифицированы и составлены из одинаковых элементов (за исключением румпелей). Два типоразмера масляных цистерн применяют для рулевых машин девяти типоразмеров.
Приводы баллера двухцилиндровых Р11 и Р13 и четырехцилиндровых рулевых машин Р15 и Р16 унифицированы и составлены из одинаковых элементов (за исключением румпелей). Два типоразмера масляных цистерн применяют для рулевых машин девяти типоразмеров.
Унификация насосов, узлов привода баллера, масляных цистерн, арматуры позволила свести до минимума количество диаметров труб, примененных в трубопроводах электрогидравлических рулевых машин типизированного ряда. Особенно высокая степень унификации деталей достигнута по смежным типоразмерам. Например, рулевые машины Р17 (Мбал=40 тс-м) и Р18 (Мбал=63 тс-м) состоят из 533 деталей, из которых 436 являются общими для указанных рулевых машин.
С 1968 г. все новые транспортные и промысловые суда отечественной постройки оснащаются электрогидравлическими рулевыми машинами типизированной конструкции серии «Р».
Рис. 8. Принципиальная схема главного трубопровода рулевой машины типизированной конструкции
1 — цилиндры гидравлического плунжерного привода; электродвигатели аксиально-поршневых насосов регулируемой подачи; 3 — насосы; 4 —поперечные румпели; 5 — электромеханические узлы управления подачей и реверсом потока масла насосов, блокированные с задающими органами системы управления машиной и обратными связями от баллера руля- 6 — клапанные коробки с распределительными и перепускными предохранительными клапанами масляной системы; 7 — продольные связи рамы машины, образующие с внутренней стороны параллели для ползунов привода.
Следует отметить, что в настоящее время на танкерах типа «Крым» (150 тыс. т) устанавливается рулевая машина марки Р26. Эта машина развивает вращающий момент на баллере 400 тс-м при массе 52 т, в то время как, например, рулевая машина танкеров типа «София» при вращающем моменте в 120 тс-м имела массу свыше 38 т. Уменьшение массы, приходящейся на единицу вращающего момента, достигнуто за счет повышения давления рабочей жидкости до 200 кгс/см2. Кроме того, плунжеры машины изготовлены пустотелыми. В целях упрощения изготовления при проектировании машины учитывались технологические требования, например, рабочие цилиндры машины выполнены со съемными донышками. Это значительно упростило обработку рабочих поверхностей цилиндра, требования к которым по шероховатости в связи с увеличением рабочего давления значительно повышены. По той же причине — с повышением давления — рабочие поверхности плунжеров обработаны с более высокой степенью точности, чем обычно.
Р26 ЧНЭЯ шаРниРная схема передачи усилия в машине марки гато замен„ена кулисной.
Рулевые машины
Спорт Рулевые машины
просмотров — 152
Рулевая машина — один из базовых механизмов судна, обеспечивающий безопасность его плавания. При строительстве судов применяются только те типы рулевых машин, которые оправдали себя в длительной эксплуатации. В своевременном отечественном судостроения применяют следующие рулевые машины: ручные с барабаном либо со звездочкой или гидравлические плунжерные и лопастные.
В случае если на судне источник питания не достаточен или отсутствует, то для момента на баллере от 2,5 до 4,0 кН. м применяют ручные рулевые машины с барабаном или звездочкой, а для моментов до 16 кН.м – ручные гидравлические рулевые машины с качающимися цилиндрами.
м применяют ручные рулевые машины с барабаном или звездочкой, а для моментов до 16 кН.м – ручные гидравлические рулевые машины с качающимися цилиндрами.
На судах обеспеченных энергией для питания приводов рулевых машин, применяют электрогидравлические рулевые машины, создающие момент на баллере от 6,3 до 4000 кН.м.
Рулевой привод (передача) – связующее звено между баллером и рулевой машиной, предназначено для передачи усилий от рулевой машины к рулю и обеспечение его перекладки.
Рулевое устройство может иметь два привода – основной и запасной. Основной рулевой привод должен действовать от источника энергии. В случае если применяется ручной рулевой привод, то при указанных ранее углах и времени перекладки усилие затрачиваемое работающим на штурвале не должно быть более 117,5 н на одного человека, а число оборотов штурвала перекладке с борта на борт не должно превышать 25.это условие ограничивает применение ручного рулевого привода в качестве основного.
Расчет базовых параметров электрогидравлической плунжерной рулевой машины, Рис. 6.
6.
Таблица 6
Рис.7. К расчёту лопастной гидравлической рулевой машины.
Расчет базовых параметров электрогидравлической лопастной рулевой машины, Рис.7. Таблица 7
Читайте также
Плунжерные рулевые машины Рулевые машины с насосами переменной подачи Рулевые машины с насосом постоянной подачи Основные сведения Электрогидравлические передачи Увеличение водоизмещения и скорости судов требует увеличения моментов на… [читать подробенее]
Рулевые машины с насосом постоянной подачи
Основные сведения
Электрогидравлические передачи
Увеличение водоизмещения и скорости судов требует увеличения моментов на бал
лере рулей. Значения моментов для больших… [читать подробенее]
Значения моментов для больших… [читать подробенее]
Основные сведения Электрогидравлические передачи Увеличение водоизмещения и скорости судов требует увеличения моментов на бал лере рулей. Значения моментов для больших современных судов измеряется тысячами и десятками тысяч килоньютоно метров ( кН*М )…. [читать подробенее]
Команда от системы управления в виде непрерывного тока (аналогового сигнала) или последовательности импульсов БЦВМ после преобразовательно-усилительных операций поступает на вход исполнительного механизма (ИМ). ИМ преобразует, усиливает слаботочный сигнал управления… [читать подробенее]
Наряду с плунжерным рулевым приводом применяют лопастные ( рис. 10.10,
10.11 ).
Лопастные рулевые машины обладают сравнительно с плунжерными лучшими массогабаритными характеристиками.![]() По числу лопастей различают два вида рулевых машин:
1. двухлопастные;
2. трелопастные.
… [читать подробенее]
По числу лопастей различают два вида рулевых машин:
1. двухлопастные;
2. трелопастные.
… [читать подробенее]
Рулевая машина — один из основных механизмов судна, обеспечивающий безопасность его плавания. При строительстве судов применяются только те типы рулевых машин, которые оправдали себя в длительной эксплуатации. В своевременном отечественном судостроения применяют… [читать подробенее]
Рулевые машины с насосами переменной подачи В зависимости от принципа действия, различают три вида гидравлических рулевых машин: 1. плунжерные; 2. лопастные; 3. с качающимися цилиндрами. Плунжерные рулевые машины по числу плунжеров ( цилиндров ) делятся на два … [читать подробенее]
Гидравлические рулевые машины (пособие для судоводителя) Харин В.М.
В настоящем издании рассмотрены структурные схемы и конструктивные особенности типовых (плунжерные, поршневые, лопастные) гидравлических рулевых машин (ГРМ), а также приведены их основные характеристики (габаритные, кинематические, динамические, нагрузка на руль, требования ИМО).
Рассмотрен с позиций «за» и «против» проблемный вопрос о целесообразности использования ГРМ при совместной работе насосов.
Изложен новый аналитический метод оценки режимов работы ГРМ.
Выполнен анализ аварий судов и аварийных ситуаций, связанных с отказами рулевых машин, на основе личного опыта автора и литературных источников. Приведены рекомендации по совершенствованию технического использования ГРМ.
Рассмотрены конструктивные особенности, назначение и характеристики подруливающих устройств и винто-рулевых колонок.
Пособие предназначено для курсантов (студентов) судоводительских специальностей морских учебных заведений III и IV уровней.
Издание будет полезно для слушателей факультетов и центров повышения
квалификации судовых специалистов, а также может использоваться курсантами (студентами) энергетических специальностей.
Введение
На судах мирового флота широко применяются гидравлические рулевые машины (ГРМ). Благодаря своим существенным преимуществам (компактности, небольшим массе и габаритам, удобству автоматизации, надежности и эффективности эксплуатации, более высокой точности управления рулем и соответственно удержанию судна на курсе, способности выдерживать значительные перегрузки без ухудшения эксплуатационных характеристик и др. ) эти машины успешно заменили устаревшие типы рулевых машин: паровые, электрические и ручные.
) эти машины успешно заменили устаревшие типы рулевых машин: паровые, электрические и ручные.
Область применения ГРМ неограничена. Они используются на всех типах судов: сухогрузах и танкерах, паромах и комфортабельных пассажирских лайнерах, супертанкерах и прогулочных катерах и т. д.
Мощность ГРМ также не имеет ограничений. Например, на супертанкерах устанавливаются ГРМ мощностью до 800 кВт (крутящий момент более 20000 кНм).
Основные характеристики ГРМ нормируются правилами ИМО и, соответственно, всеми классификационными обществами. Такие, как время перекладки руля с 35° одного борта до 30° другого, количество насосов (не менее двух), наличие предохранительных устройств (автоматически действующих клапанов и др.), дублирование линий управления, возможность аварийного управления рулем и некоторые другие.
Все машиностроительные фирмы промышленно развитых государств выпускают рулевые машины.
Интенсивное внедрение ГРМ и непрерывное их совершенствование создали ряд серьезных проблем для эксплуатационников (механиков и судоводителей): разнообразие конструкций; трудность восстановления большинства деталей в судовых условиях из-за высокой точности их изготовления, дефицит запасных частей; недостаток требуемой технической документации и опубликованной специальной литературы, необходимой для качественной подготовки судовых специалистов, повышения их квалификации и культуры технического использования и обслуживания ГРМ этими специалистами.
Отсутствие обобщенных технических материалов по устройству, принципам работы разных типов ГРМ, их характерным отказам не позволяет судоводителям и механикам принимать своевременные правильные решения по управлению судном и механизмами в ситуациях, когда времени на обдумывание и поиск выхода из аварийных происшествий недостаточно.
Известны аварии судов, причинами которых были непосредственно отказы ГРМ. Последствиями таких аварий были большие экономические убытки, загрязнение окружающей среды и даже гибель людей.
Опыт эксплуатации ГРМ выявил наряду с указанными выше ряд новых проблем. Первой проблемой является нормирование времени перекладки руля. Традиционной нормой является время перекладки руля с 35° одного борта до 30° другого — не более
28 с. Эта норма существует многие десятки лет, но до сих пор не имеет научного обоснования. Поэтому ученые России, Японии и других стран предприняли попытки выяснить, насколько существенно влияет изменение нормы (28 с) на маневренные характеристики судов различного водоизмещения.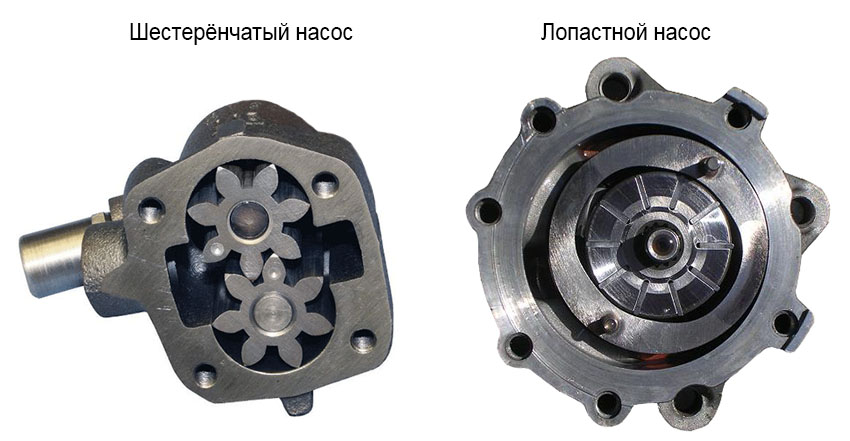
Результаты исследований оказались различными. Японские ученые предложили увеличить норму для больших судов до 50 с при одновременном увеличении площади руля для сохранения мощности ГРМ. Российские ученые, наоборот, предложили уменьшить норму для всех типов судов, несмотря на значительное увеличение мощности и стоимости ГРМ.
Предложения японских ученых ИМО не приняло, а рекомендации российских ученых оказались нереальными.
Вторая наиболее сложная проблема заключается в следующем. Согласно требованиям ИМО все ГРМ комплектуются двумя насосами, как правило, одинаковой подачи. Мощные рулевые машины имеют три и даже четыре насоса.
Установившаяся многолетняя практика использования рулевых машин такова: при плавании в открытом море работает один насос, а в сложных навигационных условиях (проливах, каналах, шлюзах, акваториях портов, в ледовой обстановке и т.д.) и при швартовных операциях (в портах и открытом море) включают в параллельную работу оба насоса, что обеспечивает повышение скорости перекладки руля примерно в 2 раза. В этом случае уменьшается постоянная времени задержки поворота и за счет этого судно быстрее реагирует на управляющие воздействия
В этом случае уменьшается постоянная времени задержки поворота и за счет этого судно быстрее реагирует на управляющие воздействия
Заметим, что все без исключения фирмы-изготовители рулевых машин разрешают использовать режим совместной работы насосов. Однако при этом режиме многие рулевые машины работают недостаточно надежно, происходят их многочисленные отказы — в том числе «загадочного» характера. Создалась, таким образом, противоречивая ситуация, когда капитаны, как правило, «за» использование режима совместной работы насосов, а старшие механики — «против». Эта ситуация оказалась международной, поэтому ИМО была вынуждена рассмотреть ее, но приняла любопытное решение в поправках к МК «СОЛАС-74», 1981 г. (правило 19-1).
Оно сформулировано так: «В районах, где судовождение требует особой осторожности, на судах должно работать более одного силового агрегата рулевого привода, если такие агрегаты могут работать одновременно».
Такая рекомендация ничего не дала эксплуатационникам, точнее, она обострила ситуацию на судах, поскольку судоводители стремятся использовать первую часть правила (19-1), а механики — вторую часть.
Такое положение не является случайным, потому что для решения противоречивой проблемы требовались результаты обстоятельных исследований по двум направлениям:
1. Каково влияние режимов работы рулевых машин на маневренные характеристики судов и насколько существенно они улучшаются при работе двух насосов по сравнению с одним?
2. Каковы причины отказов рулевых машин при совместной работе насосов и какие могут быть предложены рекомендации для их предотвращения?
Такие исследования ранее не проводились, поэтому решение ИМО оказалось несостоятельным.
Вышеназванные проблемы традиционно в течение многих лет исследуются на кафедре «Судовые вспомогательные установки» Одесской национальной морской академии.
По результатам исследований в 1965 г. была опубликована работа доктора технических наук, профессора В.В. Завиша [6], которая получила хорошие отзывы эксплуатационников и специалистов береговых организаций. Эта работа сыграла в свое время существенную роль в повышении квалификации плавсостава и, воответственно, уровня технической эксплуатации ГРМ.
В 1975 г. была опубликована работа автора, в которой наряду с другими рассматривался ряд новых вопросов (автоколебания ГРМ, сползание руля, взаимодействие главных насосов, способы регулирования ГРМ), возникших из опыта эксплуатации и требовавших выяснения. Эта работа была также полезной и получила положительную оценку.
В 1982 г. была опубликована монография автора и ряд других работ. В них были изложены результаты исследований упомянутых выше проблем, важных для механиков и судоводителей. Эти работы распространялись на судах и получили положительную оценку. Были предложения и пожелания для дальнейших исследований.
В 1984, 1992 и 2007 г.г. работниками кафедры были опубликованы учебники. Их аналогов не существовало, так как авторы занимают ведущее положение в области исследований рулевых машин.
В 2005 г опубликовано учебное пособие автора , которое предназначено для механических специальностей, но отдельные разделы по практическому использованию рулевых машин полезны для судоводителей. Это пособие написано на основе многолетних исследований автора.
Это пособие написано на основе многолетних исследований автора.
Предлагаемое учебное пособие «Гидравлические рулевые машины (пособие для судоводителя)» подготовлено для судоводителей впервые и предназначено для решения следующих задач:
1. Представить курсантам (студентам) судоводительских специальностей морских учебных заведений III и IV уровней краткую, но существенную информацию о современных гидравлических рулевых машинах: типы, конструктивные особенности, характеристики, требования И МО, техническое использование и другие вопросы.
Такая информация будет полезна также курсантам (студентам) старших курсов морских учебных заведений II уровня.
2. Наряду с этими традиционными вопросами изложить решение новых проблем: целесообразность использования рулевых машин при совместной работе насосов, надежность их совместной работы, влияние режимов работы рулевых машин на маневренные характеристики судов, типовые отказы рулевых машин.
3. Обобщить опыт использования рулевых машин на основе анализа аварийных ситуаций и серьезных аварий судов, связанных с отказами рулевых машин.
Информация по пп. 2 и 3 будет полезна не только курсантам (студентам), но также состоявшимся судоводителям для повышения их квалификации.
Учебное пособие может также использоваться курсантами (студентами) энергетических специальностей морских учебных заведений II, III и IVуровней.
Учебное пособие состоит из 9 глав и приложений.
В главе 1 представлены структурные схемы типовых рулевых машин, насосов и систем. Они дают общее представление о составных частях, их назначении и объясняют принцип действия ГРМ, насосов и систем. Рассматриваются упрощенная гидравлическая система традиционной ГРМ и новая двухконтурная ГРМ, имеющая в соответствии с последними требованиями И МО повышенную надежность. В этих машинах автоматическим образом определяется неисправный гидравлический контур, происходит переключение на другой контур и восстанавливается исправность действия ГРМ за время не более 45 с.
В главе 2 приводятся общие сведения о плунжерных и поршневых ГРМ разных зарубежных фирм. Анализируются их конструктивные особенности, основные параметры и эксплуатационные возможности.
Анализируются их конструктивные особенности, основные параметры и эксплуатационные возможности.
Глава 3 посвящена современным лопастным ГРМ. Они имеют существенные конструктивные особенности. Благодаря ряду своих преимуществ, они широко применяются на судах многих государств, в том числе на отечественном флоте.
Эти ГРМ также могут иметь простые и двухконтурные гидравлические системы.
В данной главе кратко сказано о создании и опыте эксплуатации отечественной лопастной ГРМ типа РЭГ-ОВИМУ-7.
В главе 4 рассматриваются основные характеристики рулевого устройства: нагрузка на рулевую машину, кинематические и динамические характеристики. Приводятся основные требования И МО (Регистра) к рулевым машинам.
Кинематические характеристики представляют собой графики угла и скорости перекладки руля в зависимости от времени. Они дают наглядное представление о том, как происходит перекладка руля и от каких параметров ГРМ зависит характер этих графиков. Расчет графиков выполняется по алгоритму, приведенному в приложении.
Основной динамической характеристикой рулевого устройства является его запас устойчивости. Если он отсутствует, то неизбежны автоколебания. Они вызывают интенсивные износы (и даже поломки) деталей ГРМ, насосов и подшипников руля. Кроме того, по причине автоколебаний становится невозможной работа некоторых типовых ГРМ в режиме двух насосов. Таким образом автоколебания снижают надежность работы рулевого устройства и безопасность мореплавания судов. Отсутствие или малая величина запаса устойчивости является конструктивным недостатком. До настоящего времени запас устойчивости не нормируется правила Регистра, но автоколебания известны судоводителям и механикам. Они происходят на многих судах.
Глава 5 посвящена современной проблеме использования режимов работы рулевых машин. Анализируются все «за» и «против» использования ГРМ при совместной работе насосов.
Исследования показали, что маневренные характеристики судов различного водоизмещения улучшаются при совместной работе насосов (т.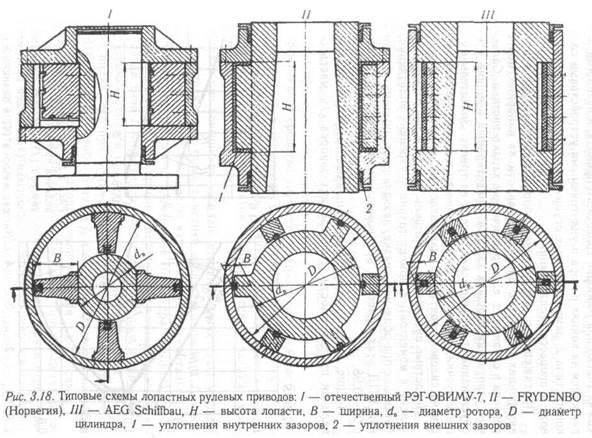 е. при увеличении скорости перекладки руля).
е. при увеличении скорости перекладки руля).
В то же время надежность работы рулевых машин в этом режиме может понижаться, возникают характерные отказы. Они зависят от типа ГРМ, ее структурной схемы.
В главе 6 приведен аналитический метод оценки режимов работы рулевых машин. Приводится методика получения регрессионных уравнений на основе метода планирования эксперимента. Эти уравнения включают четыре основные параметра (фактора) и позволяют в обобщенной форме представлять результаты анализа режимов работы рулевых машин.
В главе 7 дано описание ряда аварий судов и аварийных ситуаций, связанных с отказами рулевых машин.
Рассмотрены обстоятельно две аварии, анализ которых автор выполнял как эксперт. Показаны последовательно все действия (правильные и ошибочные) судоводителей и судомехаников в условиях нарастающей опасности аварии.
В главе 8 изложены основные правила технического использования рулевых машин, признаки некачественной их работы и дано описание устройств аварийного управления рулем.
Глава 9 посвящена подруливающим устройствам и винто-рулевым колонкам. Рассматриваются их конструктивные особенности и характеристики. Объясняются принципы их действия, назначение и области применения.
Предлагаемое учебное пособие написано на основе многолетних исследований автора в этой области и большого опыта преподавания этой дисциплины в Одесской национальной морской академии.
Автор признателен рецензентам:
В. К. Голубеву, Председателю научно-методической комиссии «Судовождение и энергетика судов», Первому проректору Одесской национальной морской академии, Заслуженному работнику народного образования Украины, кандидату технических наук, профессору.
Л. А. Козырю, профессору кафедры «Судовождение» Одесской национальной морской академии, кандидату технических наук, капитану дальнего плавания.
Все замечания курсантов (студентов) и специалистов по улучшению содержания книги будут приняты с благодарностью.
Рулевые машины. Классификация рулевых машин — Студопедия
3 ТИПА: механические, электромеханические и гидравлические. Современные суда используют гидравлические рулевые машины.
Современные суда используют гидравлические рулевые машины.
В состав гидравлической рулевой машины, так же, как в состав гидропривода другого назначения, входят: гидравлический двигатель (рулевой привод), один или два главных насоса и вспомогательные насосы, масляные трубопроводы, гидроаппаратура и вспомогательные устройства. Основной классификационный признак – тип рулевого привода. В качестве гидравлических двигателей используются силовые поршневые или плунжерные гидроцилиндры или лопастные гидроцилиндры неполноповоротного действия. В соответствии с этим гидравлические рулевые машины бывают: плунжерные, поршневые и лопастные. В составе гидравлической рулевой машины независимо от типа используются регулируемые и нерегулируемые главные насосы. В первом случае получают более высокий КПД, во втором – выше быстродействие и точность отработки заданного угла.
Требования РМРС к рулевым машинам.
Согласно правилам РМРС морское судно должно иметь главный и вспомогательный рулевой приводы. Главный рулевой привод должен обеспечивать поворот полностью погруженного руля на полном ходу судна (переднем) из диаметральной плоскости на угол 35° правого и левого борта. При тех же условиях гидравлический рулевой привод должен обеспечивать перекладку руля с борта 35° на борт 30° за время 28 сек. Вспомогательный рулевой привод должен обеспечивать перекладку руля с борта 15° на борт 15° за время 60 сек. при скорости судна 0,5 полного переднего хода, но не менее 7 узлов.
Главный рулевой привод должен обеспечивать поворот полностью погруженного руля на полном ходу судна (переднем) из диаметральной плоскости на угол 35° правого и левого борта. При тех же условиях гидравлический рулевой привод должен обеспечивать перекладку руля с борта 35° на борт 30° за время 28 сек. Вспомогательный рулевой привод должен обеспечивать перекладку руля с борта 15° на борт 15° за время 60 сек. при скорости судна 0,5 полного переднего хода, но не менее 7 узлов.
На химовозах, газовозах, танкерах, за исключением атомных перевозящих сыпучие химические грузы свыше 10000т, на остальных судах вместимостью более 70000т рулевой привод должен быть сдвоенным, а вспомогательный рулевой привод не требуется. Сдвоенной будет и рулевая машина.
На указанных выше судах, а также на судах со сдвоенными рулевыми машинами, включая пассажирские и атомные, требования по части угла и времени перекладки руля должны выполняться на судах более 10000т и свыше 70000т. Эти требования должны выполняться при использовании одной части рулевого привода и одного главного насоса, на остальных судах – 2-х частей рулевого привода и одного главного насоса. Во втором случае мощность главных насосов будет меньше.
Во втором случае мощность главных насосов будет меньше.
Если румпельное отделение частично или полностью располагается ниже ватерлинии, судно должно оборудоваться аварийным рулевым двигателем с ручным или электрическим приводом или электронасосным агрегатом.
Аварийный двигатель должен обеспечивать перекладку руля с борта на борт при скорости судна не менее 4-х узлов. Судно должно иметь два поста управления действием рулевой машины – местный пост и пост дистанционного управления.
Расхождения указателей истинного положения пера руля (на корпусе машины) и дистанционного указателя должны удовлетворять требованииям РМРС.
Рулевые машины | Лопастные рулевые машины
Благодаря усилиям отдела исследований и разработок лопастные рулевые машины исключают проблему внутренней утечки, которая является бедой для многих гидравлических рулевых машин. Наши судовые рулевые машины были одобрены Классификационным обществом Китая, Бюро Веритас и другими классификационными обществами, и широко используются для целого ряда различных судов. Благодаря высокой маневренности угол перекладки руля лопастной гидравлической рулевой машины имеет максимальный диапазон ±65°. Номинальный крутящий момент может быть достигнут под любым углом перекладки руля, что позволяет обеспечить достаточную маневренность в узких местах.
Благодаря высокой маневренности угол перекладки руля лопастной гидравлической рулевой машины имеет максимальный диапазон ±65°. Номинальный крутящий момент может быть достигнут под любым углом перекладки руля, что позволяет обеспечить достаточную маневренность в узких местах.
Особенности
1. Компактность, занимает небольшую площадь.
2. Широкий диапазон угла перекладки руля: до ±65°.
3. Простота установки для всех видов рулей. Нет Необходимости использовать подшипник барреля руля.
4. Хорошая способность уплотнения при скорости отключения менее 0.5°/мин.
5. Низкий уровень шума и хорошая ударопрочность.
По сравнению с лопастными рулевыми машинами от других китайских производителей наша продукция имеет следующие преимущества
1. Высокая надежность: даже после 3000 часов непрерывных испытаний на надежность не произошло никаких сбоев.
2. Экологическая адаптируемость: результаты испытаний на воздействие окружающей среды и испытаний на электромагнитную совместимость отвечают требованиям стандарта GJB150A-2009.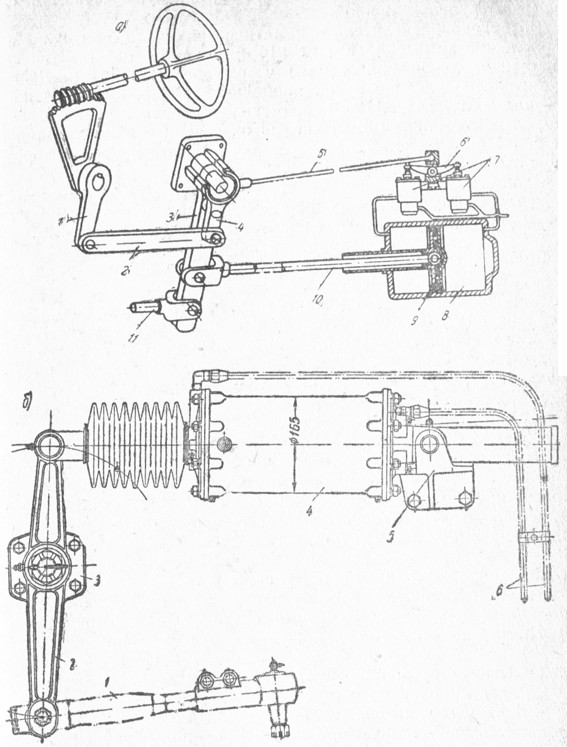
3. Высокие эксплуатационные характеристики и низкая внутренняя утечка: объем утечки в 2 раза ниже допустимого значения, указанного в промышленных стандартах, а масса изделия составляет 85-90% от стандартного значения. Это гарантирует низкое тепловыделение и высокую эффективность.
Технические параметры
Номинальный крутящий момент: 10~900 кН*м
Диаметр баллера руля: Ø80~Ø430 мм
Максимальный угол перекладки руля с электродвигателем: ±35°, ±45°, ±65°
Максимальный угол перекладки руля с механическим двигателем: ±36.5°, ±46.5°, ±66.5°
Время перекладки руля от 35° одного борта до 30° другого борта: ≤28 сек при одном насосе; ≤14 сек при двух насосах
Время перекладки руля от 45° одного борта до 40° другого борта: ≤25 сек при одном насосе (следование по реке)
Максимальное рабочее давление: 5~8 МПа
Давление начала открытие предохранительного клапана: 6.25~10 МПа
-
Гидравлическая силовая установка (ГСУ)
-
Рулевая машина
-
Гидродинамическая тест-система рулевой машины
| Рулевая машина | Рабочий крутящий момент (кН*м) | Макс. |
Диаметр (мм) | Высота (мм) | Макс . радиальная нагрузка (кН) | Макс . осевая нагрузка (кН) |
| YDZ20/2 | 20 | Φ 180 | 470×470 | 340 | 260 | 130 |
| YDZ25/2 | 25 | Φ 180 | 470× 470 | 420 | 260 | 130 |
| YDZ31.5/2 | 31.5 | Φ180 | 470×470 | 420 | 260 | 150 |
| YDZ40/2 | 40 | Φ180 | 470×470 | 480 | 260 | 150 |
| YDZ50/2 | 50 | Φ180 | Φ730 | 400 | 350 | 150 |
| YDZ63/2 | 63 | Φ180 | Φ730 | 400 | 350 | 150 |
| YDZ80/2 | 80 | Φ180 | Φ730 | 480 | 350 | 150 |
| YDZ100/2 | 100 | Φ230 | Φ810 | 580 | 350 | 240 |
| YDZ125/2 | 125 | Φ230 | Φ810 | 620 | 350 | 240 |
| YDZ160/2 | 160 | Φ280 | Φ920 | 610 | 850 | 360 |
| YDZ200/2 | 200 | Φ305 | Φ1045 | 660 | 900 | 450 |
| YDZ250/2 | 250 | Φ305 | Φ1045 | 660 | 900 | 450 |
| YDZ320/2 | 320 | Φ305 | Φ1045 | 780 | 900 | 450 |
| YDZ400/2 | 400 | Φ360 | Φ1250 | 800 | 1500 | 560 |
| YDZ500/2 | 500 | Φ360 | Φ1250 | 800 | 1500 | 560 |
| YDZ630/2 | 630 | Φ360 | Φ1250 | 920 | 1500 | 560 |
| YDZ800/3 | 800 | Φ390 | Φ1480 | 1020 | 2300 | 605 |
| YDZ1000/4 | 1000 | Φ450 | Φ1700 | 1130 | 2900 | 700 |
| YDZ1250/5 | 1250 | Φ450 | Φ1700 | 1230 | 2900 | 700 |
| Рулевая машина | Рабочий крутящий момент (кН*м) | Макс. диаметр баллера руля (мм) диаметр баллера руля (мм) |
Диаметр (мм) | Высота (мм) | Макс . радиальная нагрузка (кН) | Макс . осевая нагрузка (кН) |
| YDZ16/2 | 16 | Φ140 | 囗 470×470 | 400 | 260 | 130 |
| YDZ20/2 | 20 | Φ140 | 囗 470×470 | 400 | 260 | 130 |
| YDZ25/2 | 25 | Φ140 | 囗 470×470 | 460 | 260 | 130 |
| YDZ31.5/2 | 31.5 | Φ180 | Φ730 | 420 | 350 | 150 |
| YDZ40/2 | 40 | Φ180 | Φ730 | 420 | 350 | 150 |
| YDZ50/2 | 50 | Φ210 | Φ820 | 580 | 350 | 150 |
| YDZ63/2 | 63 | Φ210 | Φ820 | 580 | 350 | 240 |
| YDZ80/2 | 80 | Φ210 | Φ820 | 550 | 350 | 240 |
| YDZ100/2 | 100 | Φ280 | Φ820 | 620 | 850 | 360 |
| YDZ125/2 | 125 | Φ280 | Φ1045 | 660 | 900 | 450 |
| YDZ160/2 | 160 | Φ280 | Φ1045 | 660 | 900 | 450 |
| YDZ200/2 | 200 | Φ280 | Φ1045 | 750 | 900 | 450 |
| YDZ250/2 | 250 | Φ305 | Φ1050 | 620 | 1000 | 450 |
| YDZ320/2 | 320 | Φ305 | Φ1050 | 750 | 1000 | 450 |
| YDZ400/2 | 400 | Φ360 | Φ1250 | 900 | 1500 | 560 |
| YDZ500/2 | 500 | Φ390 | Φ1480 | 900 | 2200 | 605 |
| YDZ630/2 | 630 | Φ390 | Φ1480 | 900 | 2200 | 605 |
Мы предлагаем производство рулевых машин по ТУ заказчика.
«Судовые вспомогательные механизмы и устройства»
«Судовые вспомогательные механизмы и устройства»
государственной аттестации выпускников специальности: 180403 «Судовождение»
2014 г.
Омский институт водного транспорта — филиал ФГБОУ ВО «НГАВТ», структурное подразделение СПО Омское командное речное училище имени капитана Евдокимова В.И.
Гринимеер В.В., зав. судоводительским отделением, преподаватель специальных дисциплин
Ф.И.О., ученая степень, звание, должность,
Рекомендована цикловой методической комиссией судовдительских дисциплин
Протокол № _______ от «_____» ___________ 20_____г.
Председатель ____________________ /В.В. Гринимеер/
Рассмотрено на Методическом совете
Протокол №___ от «_____» ___________ 20_____г.
Утверждаю «_____» ___________ 20_____г.
Начальник учебно-методического отдела ________________ /Е. В. Жердева/
В. Жердева/
1 Насосы и вентиляторы 4
1.1 Технические характеристики судовых насосов: Q и H 4
1.2 Классификация поршневых насосов. Воздушные колпаки 7
1.3 Конструкция, принцип действия поршневых насосов 10
1.4 Центробежный насос типа «К», конструкция и принцип действия 12
1.5 Кавитация в центробежном насосе. Способы борьбы с кавитацией 14
1.6 Осевая сила в центробежном насосе и способы ее уравновешивания 15
1.7 Струйные насосы. Принцип работы эжекторов 19
1.8 Назначение, устройство и принцип действия шестеренчатых насосов 21
1.9 Назначение, устройство и принцип действия винтовых насосов 27
1.10 Назначение, устройство и принцип действия осевого насоса 29
1.11 Устройство и принцип действия вихревых насосов 33
1.12 Назначение, классификация, и принцип действия вентиляторов 36
2 Судовые системы 42
2.1 Назначение и классификация судовых систем 42
2.2 Арматура судовых систем. Классификация арматуры 44
2. 3 Устройство балластной системы. Требования Речного Регистра РФ 48
3 Устройство балластной системы. Требования Речного Регистра РФ 48
2.4 Устройство осушительной системы. Требования Речного Регистра РФ 50
2.5 Санитарные системы речных судов 52
2.6 Система водоснабжения, состав схемы, работа 54
2.7 Станция приготовления питьевой воды «Озон 0,5» 56
2.8 Назначение систем: сточной, фановой и шпигатов 58
2.9 Назначение и типы систем отопления 60
2.10 Классификация противопожарных систем 64
2.11 Пожарные извещатели 68
2.12 Система водотушения 70
2.13 Система пенотушения и жидкостного тушения 73
2.14 Система углекислотного пожаротушения 78
2.15 Специальные системы наливных судов 81
2.16 Газоотводная система наливных судов 82
3 Судовые устройства 85
3.1 Виды рулевых приводов 85
3.2 Гидравлическая рулевая машина, конструкция и принцип действия 88
3.3 Электрическая рулевая машина, конструкция и принцип действия 92
3.4 Конструкция, принцип действия электроручного брашпиля 95
3. 5 Назначение и типы шлюпбалок 97
5 Назначение и типы шлюпбалок 97
3.6 Конструкция и принцип работы шлюпочной лебедки 100
3.7 Назначение и устройство буксирных лебедок 101
3.8 Устройство и принцип действия автосцепов 105
3.9 Устройство и принцип действия водогрейных котлов 110
3.10 Устройство и принцип действия утилизационных котлов 114
Список используемой литературы 118
Понимание системы рулевого механизма на кораблях с ясностью
Система рулевого механизмаявляется частью кораблей с момента своего существования. Одной из первых рулевых систем была пара весел, которая использовалась для движения корабля и управления им. С развитием технологий система развивалась от лопастей весел до руля и хвостовиков до баллера руля и румпеля, обеспечивающего поворотный момент.
Есть большая вероятность, что вы станете свидетелями того, как руль помогает управлять судном / лодкой. Действительно, руль направления является неотъемлемой частью узла рулевого управления, но его действие облегчается с помощью другой сложной бортовой системы, называемой «Система рулевого механизма». Система рулевого управления обеспечивает движение руля направления в ответ на сигнал с мостика.
Система рулевого управления обеспечивает движение руля направления в ответ на сигнал с мостика.
Перед тем, как приступить к построению и работе системы рулевого привода; Мы должны изучить правила, касающиеся систем рулевого управления на борту судов.
Правила для системы рулевого управления:
- Каждое судно должно быть оборудовано основной и вспомогательной системами рулевого управления.
- Расположение обеих систем должно быть таким; что отказ одного не должен отрицательно сказаться на другом.
- Предохранительный клапан должен быть установлен на любой части гидравлической системы рулевого управления.
- Балка руля и рулевой механизм должны быть достаточно прочными и способными управлять на максимальной скорости.
- Балка руля и рулевой механизм должны быть способны перемещать руль от 35 o по левому борту до 35 o по правому борту при максимальной осадке и максимальной скорости. Они также должны переместить руль направления от 35 o с одной стороны до 30 o с другой не более чем за 28 секунд.
- Балка руля и рулевой механизм должны обеспечивать управление на максимальной скорости за кормой.
- Вспомогательная система рулевого управления должна иметь достаточную прочность для эффективного управления судном при нормальной морской скорости в аварийных условиях.
- Вспомогательная система рулевого управления должна позволять перемещать руль направления с одного борта на другой (с 15 o до 15 o ) не более чем за 60 секунд.
- За каждый танкер для нефти, газа и химовозов валовой вместимостью более 10 000; система главного рулевого механизма должна иметь два и более одинаковых силовых агрегата.
Типы систем рулевого управления
- Электрические: Примером является система Уорда-Леонарда (мы не будем обсуждать; если вам интересно, вы можете проверить эту ссылку)
- Гидравлический: Пример — система с двумя и четырьмя цилиндрами. (Мы обсудим подробно)
Детали системы рулевого управления
Систему рулевого управления можно разделить на три основные части, а именно:
- Блок управления: он передает желаемый угол руля направления от мостика до рулевого колеса.
 .Затем он активирует силовой агрегат и систему трансмиссии в рулевой рубке. Пример: гидравлическая система Telemoter.
.Затем он активирует силовой агрегат и систему трансмиссии в рулевой рубке. Пример: гидравлическая система Telemoter. - Блок питания: После получения сигнала о расчетном угле поворота руля от блока управления; Он мгновенно создает силу для поворота руля направления на определенный угол.
- Передача на баллер руля: это средство, с помощью которого осуществляется движение руля направления.
Гидравлическая телемоторная система
Современная телемоторная система работает по принципу ведущий и ведомый.Он состоит из двух основных блоков: «Передатчик» и «Приемник». Передатчик расположен на мостике и преобразует механическое движение рулевого колеса у руля в гидравлическую силу. Затем он отводится назад приемником рулевого механизма.
Гидравлический передатчик
Когда рулевое колесо у руля поворачивается (скажем: правый борт), тогда вращающийся поршень перемещается вправо, заставляя правый гидроцилиндр опускаться.
Он создает давление в гидравлическом масле, проталкивая его в ресивер через правые боковые трубы к ресиверу. Движение шестерни вправо также поднимает левый гидроцилиндр, позволяя маслу возвращаться из блока ресивера.
Движение шестерни вправо также поднимает левый гидроцилиндр, позволяя маслу возвращаться из блока ресивера.
Жидкость практически не сжимаема, поэтому любое движение вниз правого поршня вызывает идентичное движение в приемном блоке.
Это приводит к перемещению цилиндра на стороне приемника; вытеснение равного количества гидравлического масла обратно в передатчик телемотора. Это занято пространством, созданным восходящим движением левого плунжера.
Корпус обычно состоит из оружейного металла с медными трубками и латунными плашками.В системе требуется устройство (обозначенное как перепускной клапан), позволяющее изменять объем масла из-за изменений температуры.
Перепускной клапан также служит для наполнения / пополнения системы и обеспечивает равновесие между обеими сторонами системы.
Гидравлический ресивер
Как и в предыдущем случае, когда рулевое колесо у руля (мостика) перемещено на правый борт. Это толкает гидроцилиндр справа вниз, создавая гидравлическое давление на приемник телемотора. Приемник телемотора состоит из цилиндра ствольной коробки в рулевой рубке с подвижным цилиндром, прикрепленным к охотничьему снаряжению.
Приемник телемотора состоит из цилиндра ствольной коробки в рулевой рубке с подвижным цилиндром, прикрепленным к охотничьему снаряжению.
Давление, создаваемое передатчиком телемоторного двигателя, создает силу для перемещения цилиндра приемника телемотора. Что в свою очередь меняет положение охотничьего снаряжения; изменение подачи насоса (Control Unit).
Телемоторная система зарядки
Для зарядки гидравлической телемоторной системы предусмотрены специальные приспособления. Это делается для того, чтобы в баке был постоянный напор масла, чтобы избежать попадания воздуха в систему.
Для заправки качайте масло до тех пор, пока в точке C не произойдет чистый слив. Затем мы должны открыть клапаны C, D, E и F. Затем мы открываем воздушные краны и продолжаем откачку до тех пор, пока не получим слив на D.
Обычно подпружиненный клапан предусмотрен на обратной линии для предотвращения любого обратного потока в системе зарядки. Рулевое колесо расположено по центру, затем открываются байпас и зарядка v / v.
Прокачивайте до тех пор, пока не будет удален весь воздух из телемоторной системы. Теперь закройте воздушные краны.Закройте v / v заправки и байпаса и откройте запорные клапаны заправки. Теперь механизм готов к испытанию на герметичность.
Силовой агрегат
Насос, двигатель или двигатель, используемые в качестве первичного двигателя для изменения положения руля направления. Обычно переменные объемные насосы используются для подачи масла / любой другой рабочей жидкости в систему рулевого управления, соединенную с рулем направления.
Эти насосы используются в системе рулевого управления, поскольку они хорошо подходят для приложений, требующих постоянного изменения потока жидкости.
Он работает по принципу изменения хода насоса для изменения производительности с помощью таких деталей, как плавающее кольцо и наклонная шайба.Направление потока зависит от расположения плавающего кольца; либо слева, либо справа от центра.
В то время как скорость разряда зависит от величины смещения плавающего кольца из его среднего положения.
Эти насосы можно легко разделить на два основных типа:
- Насосы Hele-Shaw (Radical Piston)
- Аксиально-поршневые насосы. (Насосы VSG)
Насосы Hele-Shaw
Насос Hele-shaw относится к насосу переменной производительности
Хотя во многих книгах и статьях работа насоса Hele-Shaw описана сложным образом, в действительности есть, работает просто.
Этот насос соединен с двигателем для вращения вала с постоянной скоростью, к которому подключены цилиндры.
Плавающее кольцо приводится в действие / приводится в движение механической связью (например, охотничьим снаряжением), и это движение вызывает эксцентриситет концентрического плавающего кольца и поршня (цилиндров). Итак, теперь всасывание и нагнетание происходят, когда насос вращается в эксцентричном состоянии.
Эксцентриситет плавающего кольца определяет ход поршня, плавающее кольцо вмещает тапочки.
Пока сохраняется концентрическое состояние, не происходит всасывания или нагнетания, поскольку происходит эксцентриситет, начинается всасывание и нагнетание. Направление потока зависит от расположения плавающего кольца.
Направление потока зависит от расположения плавающего кольца.
Насос VSG
Насос VSG — это усовершенствованный тип насоса переменного рабочего объема с аксиально-поршневой компоновкой, который работает по принципу «поршень, совершающий возвратно-поступательное движение, втягивает жидкость во время втягивания и нагнетания при выдвижении».
Он состоит из следующих основных частей: кожух, блок цилиндров, поршень, приводной вал, наклонная шайба, регулирующий клапан и впускное и выпускное отверстия.
Здесь возвратно-поступательное движение аксиального поршня достигается за счет использования наклонной шайбы. Качающаяся шайба — это устройство, используемое в насосах переменной производительности для изменения движения вращающегося вала на возвратно-поступательное движение аксиального поршня.
Насосы VSG широко известны как насосы с наклонной шайбой. Эти насосы обычно используются в качестве рулевого насоса на больших судах.
Из-за расположения наклонной шайбы в насосах VSG поршень вращается вокруг вала вместе с цилиндром поршня в сборе.
Имеется контакт между поверхностью наклонной шайбы и башмаком поршня для синхронного движения аксиального поршня.
Во время половины оборота поршень выдвигается, что приводит к увеличению объема внутри цилиндра; в то время как в другой половине приводит к уменьшению громкости. Это постоянное явление приводит к всасыванию и разгрузке насоса.
Типы рулевого механизма
В зависимости от необходимого крутящего момента; на борту судна может быть один из двух типов рулевого механизма: —
- Тип поршня (2 поршня против 4 поршня)
- Тип поворотно-лопастного типа.
Тип поршня
Одна из наиболее распространенных систем рулевого управления, используемых на кораблях; Рулевые механизмы поршневого типа содержат гидроцилиндры, прикрепленные к дискам, соединенным с гидравлическими насосами.
Он может иметь поперечную головку с румпелем с вилкой / скругленным рычагом для преобразования моментов гидроцилиндра в угловой момент румпеля; или включает в себя привод ползуна Rapson, в котором поперечина может свободно скользить по круглым рычагам румпеля.
Гидравлическая система рулевого управления с двумя гидроцилиндрами
Гидравлический рулевой механизм с двумя гидроцилиндрами состоит из двух цилиндров, насоса и двигателя, как показано на предыдущем рисунке.Насос имеет однонаправленный переменный рабочий объем, постоянную скорость потока.
Когда масло закачивается в левый гидроцилиндр (порт) и снимается с правого гидроцилиндра (Stbd), цилиндр перемещается слева направо. Руль перемещается на правый борт, а штурвал — на левый.
Мгновенная подача прекращается, движение рычага руля прекращается, и руль направления гидравлически фиксируется в этом новом положении, потому что масло не может выйти из цилиндра.
Поднятие насоса PSL приводит к тому, что насос продолжает ход и вызывает поток в левый цилиндр и создает давление в правом цилиндре. Когда PSL удаляется, происходит обратный процесс: LHS находится под давлением DE, а RHS находится под давлением.
Когда PSL в настоящее время находится в центральном положении, обозначенном «0» на фиг. Насос не трогается, и масло остается в поршневых цилиндрах с левой и правой стороны. © 2018, Автор ShipFever, Лицензия CC BY 4.0
Насос не трогается, и масло остается в поршневых цилиндрах с левой и правой стороны. © 2018, Автор ShipFever, Лицензия CC BY 4.0
Рабочий
Чтобы объяснить, как эти движения рулевого управления происходят непрерывно и автоматически, рассмотрим желаемое движение руля направления на 5 градусов Порт.
При получении сигнала из рулевой рубки цилиндр телемоторного приемника перемещается на 5 градусов влево на плоскости рулевого управления.
Рычаг L1 с шарниром посередине принимает положение L1 ‘. Рычаг L2 переместится в точку F и займет положение L2 ‘. В результате PSL подталкивается к насосу, когда он катится к рычагу L2, и насос начинает качать левый цилиндр, одновременно вытягивая его из правого цилиндра.
Тараны будут скользить слева направо, а руль направления должен двигаться в сторону порта.По мере того, как руль направления движется к левому борту, рычаг L3 перемещается влево. Руль направления продолжает движение в направлении левого борта до тех пор, пока под углом 5 градусов рычаг левого борта не переместится из положения L2 ‘в старое положение L2.
Аварийный режим при отказе телемоторного двигателя
При отказе телемоторной системы; в системе должно быть подходящее устройство для ручного управления.
Чтобы выполнить ручное управление, сначала мы должны удалить штифт тяги на стороне приемника блока управления и вставить его в ручной редуктор системы управления.Теперь, используя колесо трюков, мы можем управлять перемещением руля направления вручную.
Сделаны приспособления в системе рулевого привода; таким образом, что в случае использования рычажного механизма приемника рычаг ручного переключения передач остается неактивным и наоборот.
Предусмотрен только один вывод, чтобы гарантировать, что только один из двух остается активным в данный момент.
Гидравлическая система рулевого управления с четырьмя гидроцилиндрами
Система рулевого управления с четырьмя гидроцилиндрами работает по тому же принципу, что и система рулевого управления с двумя гидроцилиндрами.Единственная разница в том, что; у него четыре ползуна вместо двух.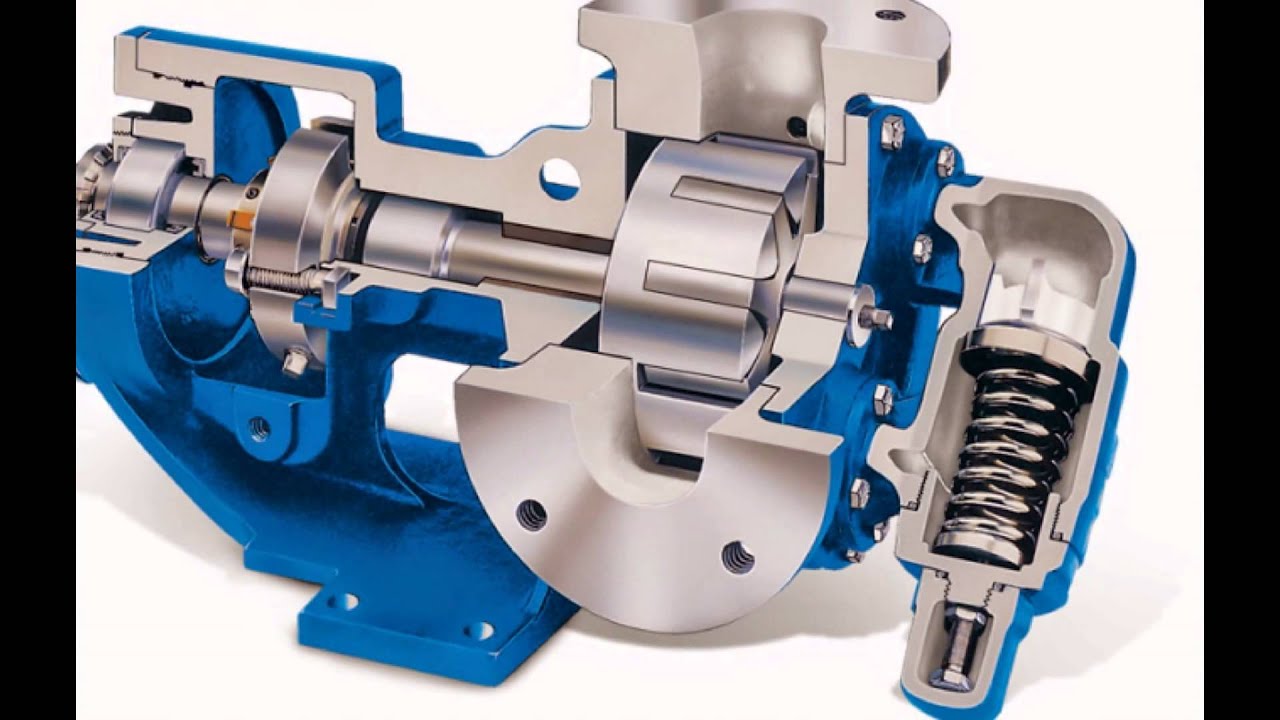 Развиваемый крутящий момент также в два раза выше, чем у двухцилиндрового рулевого управления, что обеспечивает лучшую безопасность и работу в аварийных ситуациях.
Развиваемый крутящий момент также в два раза выше, чем у двухцилиндрового рулевого управления, что обеспечивает лучшую безопасность и работу в аварийных ситуациях.
В чрезвычайных ситуациях, например, при утечке гидравлической жидкости, его можно использовать для рулевого управления с небольшими корректировками в системе; Например, изоляция одного комплекта гидроцилиндров через байпасные и стопорные клапаны. в аварийном состоянии это может быть достигнуто следующим образом:
1. Во время нормальной работы, когда все 4 гидроцилиндра работают: запорные клапаны 1, 2, 3 и 4 открыты, байпасные клапаны 5 и 6 закрыты
2.Запорный клапан 1 и 2 закрыт, перепускной клапан 5 открыт, запорный клапан 3 и 4 открыт, перепускной клапан 6 закрыт; Плунжеры 1 и 2 изолированы (из-за утечки и т. Д.). Теперь работают только плунжеры 3 и 4.
3. Запорный вентиль 3 и 4 закрыт, перепускной клапан 6 открыт; Запорные клапаны 1 и 2 открыты, байпасный клапан 5 закрыт; Плунжеры 3 и 4 изолированы (из-за утечки и т. Д.). Теперь только плунжеры 1 и 2 работают.
Конструкция системы рулевого управления Safematic
В соответствии с требованиями компании Solas, все танкеры вместимостью более 10 000 брутто-тонн и все остальные суда вместимостью 70 000 брутто-тонн должны иметь систему рулевого управления Safematic.
Должны быть приняты меры для локализации неисправности и продолжения использования системы рулевого управления в аварийных ситуациях. Чтобы избежать полного отказа системы рулевого управления, в систему вводятся автоматические запорные и перепускные клапаны.
В нормальных условиях один насос удовлетворяет потребность всех четырех гидроцилиндров. В случае утечки реле уровня активируется, запускает резервный насос и поднимает тревогу.
Но если дальнейшая утечка в системе сохраняется, она запускает перепускной и стопорный клапан.Теперь рулевой механизм работает на 50% крутящего момента, изолируя неисправный комплект цилиндров.
Роторно-лопастной Дизайн:
Рулевой привод с лопастями работает по тому же принципу, что и двух- и четырехтактные системы рулевого управления. Единственная разница в том, что вместо плунжеров здесь используются разные камеры, построенные корпусом и лопатками.
Когда камеры A и D находятся под давлением; A&D подключается к напорной стороне насоса, а B&C — к стороне всасывания. Это поворачивает руль направления против часовой стрелки.
Расположение поворотных лопастей предпочтительнее системы с двумя или четырьмя поршнями, где меньше места, малый бюджет и требуется такой же выходной крутящий момент при гораздо более низком гидравлическом давлении.
Примечание: Приведенное выше содержание является правильным, насколько я знаю, но вы можете оставить комментарий ниже, если я допустил некоторые ошибки или было ли оно полезно для вас.
Также читайте:
или
Запросите тему!
Гидравлическое против механического рулевого управления лодки и руководство по системам рулевого управления
Большинство лодок имеют механические или гидравлические системы рулевого управления.Выбор правильной системы рулевого управления для вашей лодки зависит от размера лодки и типа (и размера) двигателя. Возможно, вы собираетесь модернизировать рулевое управление вашей лодки с подвесного румпеля на механическое или с механического на гидравлическое рулевое управление.
Этот пост предназначен для того, чтобы дать вам хороший обзор систем рулевого управления лодки, чтобы помочь вам выбрать правильное рулевое управление для вашей лодки. Он также включает несколько полезных советов по обслуживанию и ремонту. Однако это только общая информация и не предназначена для замены профессиональных рекомендаций квалифицированного морского механика.Всегда обращайтесь за советом к квалифицированному специалисту в этой области или нанимайте его для выполнения работы за вас, если вы в чем-то не уверены.
Что такое гидравлическое рулевое управление и как оно работает?
На лодках гидравлическое рулевое управление обычно используется с подвесными моторами средней и высокой мощности.
Гидравлические системы рулевого управления используют легкий гидравлический шланг для управления рулевым управлением. Это обеспечивает плавное и легкое ощущение веса на больших или мощных судах при повороте рулевого колеса.Благодаря меньшему количеству металлических деталей, чем в механической системе, гидравлическое рулевое управление более устойчиво к коррозии. Гидравлические системы могут справиться со всеми условиями крутящего момента и могут потребовать только усилия кончика пальца.
Гидравлические системы лодки состоят из двух основных частей — руля и цилиндра.
Шлем — из гидронасоса и клапанов. При повороте рулевого колеса включается насос, и наклонная шайба давит на маленькие поршневые насосы. Рулевое управление отвечает за преобразование вращательного движения рулевого колеса в двухтактное действие на тросе.Этот трос направляет руль направления влево или вправо, чтобы направить лодку в желаемом шкипером направлении. Большинство рулей вращаются и используют шестерни для перемещения руля направления.
Цилиндр— движется, когда жидкость откачивается из руля после поворота колеса. Цилиндр действует между двумя точками на подвесном двигателе и не оказывает никакого воздействия на корпус или палубу. Цилиндр состоит из ползуна, расточенного цилиндра и крепежа.
Шланг — гидравлический шланг переносит жидкость от руля к цилиндру и обратно.
Что такое механическое рулевое управление и как оно работает?
Механические системы рулевого управления, также известные как рулевое управление с ручным управлением или без усилителя, чаще всего используются на небольших лодках.
В механическом рулевом управлении используются двухтактные кабели, соединяющие рулевое колесо в передней части лодки с подвесным мотором. Эта система обеспечивает хорошую управляемость и безопасную эксплуатацию для небольших лодок длиной до 10 метров.
Некоторые владельцы небольших лодок, которые используют румпель для управления лодкой, могут захотеть перейти на механическое рулевое управление, чтобы позволить им использовать рулевое колесо, сидеть ближе к передней части и управлять с меньшей физической силой.
Механическая система рулевого управления лодки состоит из трех основных частей — руля (поворотного или реечного), троса рулевого управления и комплекта для подключения (при необходимости).
Rotary Helm — поворотный штурвал расположен за приборной панелью и преобразует движения рулевого колеса в толкающее-толкающее действие на тросе. Рулевое управление имеет круглую шестерню, на которой держится трос поворота. Разные рули вызывают разное количество поворотов рулевого колеса от упора до упора (количество раз, которое требуется капитану, чтобы полностью повернуть колесо с одной стороны на другую).Чем больше оборотов колеса, тем меньше усилий для поворота лодки.
Два типа поворотных штурвалов имеют следующие шестерни:
Тип редуктора— большой круглый набор циферблатов и датчиков за приборной панелью, который предоставляет шкиперу информацию о частоте вращения двигателя, производительности, расходе топлива и расположении триммера. Система может быть аналоговой или цифровой, но из-за своего размера может не поместиться в приборной панели небольших лодок.
Тип планетарной передачи— в этой системе используются три или более шестерен, которые сцепляются с барабаном для перемещения троса.Хотя эта система намного меньше, чем система редуктора, у нее больше точек износа.
Реечная шестерня— Установленная на рулевом валу ведущая шестерня входит в зацепление с реечной передачей в трубчатом корпусе. Реечные и шестеренные рули обеспечивают меньшее трение, чем поворотный руль, и представляют собой эффективную систему для перемещения троса. Однако они широкие и не подходят для многих дашбордов из-за их большего размера. Они идеально подходят для лодок с низкими панелями приборов, у которых нет достаточного вертикального зазора для поворотного штурвала.
Трос рулевого управления — Двухтактный трос, который перемещает руль направления или двигатель в ответ на поворот рулевого колеса. Рулевое управление с одним тросом подходит для лодок с двигателем мощностью 130 л.с. и менее. Более мощные двигатели, такие как двигатель V6 на высокопроизводительной лодке, должны использовать систему рулевого управления с двумя тросиками. Два штурвала уложены друг на друга на одном валу рулевого колеса, чтобы распределить нагрузку на два троса. Когда один трос находится в натянутом состоянии, а другой — в сжатом, крутизна рулевого управления сводится к минимуму, обеспечивая лучшее ощущение и контроль.
Комплект для подключения двигателя— оборудование, которое соединяет двигатель или румпель с помощью кабеля рулевого управления
Различия между гидравлическими и механическими системами рулевого управления
Решение о том, какую систему рулевого управления вы выберете, будет в основном зависеть от требований вашей лодки, включая ее размер, дифферент двигателя и гребной винт.
Размер лодки
Гидравлическая система рулевого управления рекомендуется для больших лодок длиной 10 метров и более, а также для судов, движущихся с высокой скоростью.Крутящий момент (или сила) большого подвесного мотора означает, что может быть трудно выйти из поворота или резко отклониться от прямого курса с помощью механического рулевого управления.
Механическая система рулевого управления подходит для лодок длиной менее 10 метров. Механическое рулевое управление не должно использоваться на лодках, на которых установлены двигатели, мощность которых превышает рекомендованную максимальную мощность в лошадиных силах.
Стоимость рулевых систем
Механические системы дешевле, но в последнее время гидравлические системы, подходящие для небольших лодок, стали дешевле.Это означает, что теперь все больше людей хотят модернизировать свои лодки с помощью гидравлической системы рулевого управления. Ожидается, что эта тенденция сохранится, и в будущем для лодок с подвесными моторами мощностью 50 л.с. или меньше будет более распространено использование гидравлического рулевого управления.
Техническое обслуживание
Все системы рулевого управления требуют осмотра и обслуживания, но гидравлическая система рулевого управления требует меньше обслуживания по сравнению с механической. Даже в этом случае, несмотря на то, что ваша гидравлическая система более надежна, она по-прежнему требует регулярного обслуживания.Для дальнейшего чтения ознакомьтесь с этими советами по установке и обслуживанию гидравлической системы рулевого управления.
Крепление лодочного мотора
Какое бы рулевое управление вы ни использовали, убедитесь, что мотор лодки установлен правильно в соответствии с инструкциями производителей лодки и двигателя. Положение двигателя может повлиять на нагрузку на рулевое управление и управляемость лодки.
Техническое обслуживание механической системы рулевого управления вашей лодки
Техническое обслуживание вашей системы рулевого управления следует выполнять не реже двух раз в год, чтобы поддерживать ее в рабочем состоянии и обеспечивать бесперебойную и безопасную работу.Коррозия рулевого троса может вызвать резкие движения, заедание и даже полную потерю управляемости. Проконсультируйтесь с инструкциями производителя перед началом любого обслуживания
Этапы обслуживания:
1. Осмотрите систему рулевого управления: осмотрите штурвал и двигатель, проверяя наличие незакрепленных или корродированных деталей. Проверьте пластиковую оболочку кабеля на предмет трещин, порезов или следов коррозии. Если вы обнаружите какое-либо повреждение, найдите номер детали, чтобы полностью заменить кабель, не пытайтесь его отремонтировать.
2. Техническое обслуживание троса рулевого управления: снимите телескопический цилиндр троса рулевого управления с трубы наклона, ослабив стопорную гайку на конце кожуха. Вам также нужно будет открутить стопорную гайку с троса рулевого механизма и перетянуть тягу. Потяните кабель за оболочку, чтобы освободить шток опорной трубы наклона. Очистите внутренний диаметр опорной трубы наклона и удалите коррозию в трубе наклона проволочной щеткой. Используя водостойкую морскую смазку, смажьте трубку наклона. Очистите телескопический цилиндр троса рулевого механизма проволочной щеткой и протрите.Используйте консистентную смазку для смазывания скользящих частей телескопического гидроцилиндра.
3. Соберите детали, убедившись, что все плотно прилегает к ним и нет чрезмерного люфта в движущихся частях.
4. Если лодка не будет использоваться в течение сезона, снимите вывод кабеля с трубки и храните отдельно.
Замена троса рулевого управления
Рекомендуется полностью заменить трос рулевого механизма, если он поврежден. Кабель должен быть проложен без перегибов, резких изгибов или препятствий, чтобы шкипер мог маневрировать лодкой на любой скорости.Множественные изгибы троса могут вызвать люфт и неэффективное управление, поэтому при прокладке троса используйте как можно меньше изгибов.
Проверьте легкость управления во всем диапазоне от упора до упора, чтобы убедиться, что новый трос работает, прежде чем вывести лодку на воду.
Для получения дополнительной информации или просмотра доступных запчастей см. Наш ассортимент механического рулевого управления.
Модернизация системы рулевого управления лодки
Некоторые производители скажут вам, что рулевое управление следует заменить на такое же.Итак, если у вашей лодки есть механическая система рулевого управления, они рекомендуют вам использовать механическую систему, чтобы лодка продолжала управлять так, как было задумано.
Однако в большинстве случаев переход на новую систему не является проблемой. Просто имейте в виду, что лодка будет управлять по-другому, поэтому вам потребуется некоторое время, чтобы привыкнуть к новому рулевому управлению, прежде чем вы преодолеете любые сложные морские условия.
Переход с румпеля на механическое рулевое управление — факторы, которые необходимо учитывать
Если вам надоело сидеть в задней части лодки с румпелем, возможно, вам понадобится механическая система.Однако это непростое решение, когда вы думаете о замене румпеля на лодке с механическим рулевым управлением. Ниже приведены некоторые факторы, о которых следует подумать, прежде чем принимать решение.
Преимущества перехода на механическое рулевое управление:
Нет обратной связи — для удержания румпеля по прямой линии требуется значительное усилие. Величина обратной связи определяется системой рулевого управления, лодкой, гребным винтом и скоростью лодки.
Меньше утомляемости — суровые условия или продолжительное управление лодкой может привести к усталости или боли в руке.
Лучшая обзорность — механическое рулевое управление позволяет вам сидеть ближе к носу лодки и лучше видеть при управлении.
К недостаткам перехода на механическое рулевое управление можно отнести:
Меньше места — рулевое колесо и руль займут ценное место на вашей лодке, поэтому посмотрите, сколько места вы можете позволить себе потерять.
Маневренность — некоторые владельцы лодок сообщают, что их лодкой стало труднее управлять после завершения модернизации до механического рулевого управления.Будьте готовы потратить время на привыкание к новой системе рулевого управления, прежде чем преодолевать любые трудные условия.
Стоимость — покупка запчастей и оплата труда (если вы не сделаете это сами) могут быть дорогими.
Переход с механического на гидравлическое рулевое управление
С каждым годом все больше владельцев лодок переводят свое механическое рулевое управление на гидравлическое. Если вы будете следовать инструкциям производителя в вашем комплекте, вы сможете самостоятельно установить новую гидравлическую систему рулевого управления.Но если вы не уверены в себе, может быть безопаснее нанять профессионала, который сделает это за вас.
Примечание по безопасности
Рулевое управление — одна из немногих частей вашей лодки, которая имеет единственную точку отказа. Полная потеря рулевого управления возможна, если вы не будете следовать инструкциям по установке или регулярно проверять и обслуживать вашу систему рулевого управления.
Разборка или ремонт приведет к аннулированию некоторых гарантий и может вызвать опасные проблемы с рулевым управлением вашей лодки, поэтому внимательно прочтите свое руководство, прежде чем приступать к каким-либо работам.Помните, что некоторые детали, такие как нейлоновые гайки, предназначены только для одноразового использования. Если вы снимете их для обслуживания или ремонта, не используйте их снова, так как они могут выйти из строя.
Какую бы систему рулевого управления вы ни использовали, убедитесь, что мотор лодки установлен правильно в соответствии с инструкциями производителя лодки и двигателя. Положение мотора может повлиять на нагрузку на рулевое управление и управляемость лодки.
Комплекты рулевого управления для катера
Покупка полных комплектов механического рулевого управления делает работу проще и менее рискованной, чем покупка отдельных деталей.Комплекты гидравлического рулевого управления на 115, 150 и 300 л.с., а также запчасти доступны в нашем интернет-магазине.
Если вам нужна помощь в выборе подходящей системы рулевого управления или детали для вашей лодки, не стесняйтесь позвонить опытной команде Boat Accessories Australia по телефону 1300 308 161 или связаться с нами через Интернет.
% PDF-1.4 % 230 0 объект > эндобдж xref 230 124 0000000016 00000 н. 0000003849 00000 н. 0000003981 00000 н. 0000004215 00000 н. 0000004498 00000 н. 0000004631 00000 н. 0000005356 00000 н. 0000005393 00000 н. 0000005839 00000 н. 0000006209 00000 н. 0000006544 00000 н. 0000006880 00000 н. 0000007241 00000 н. 0000007601 00000 н. 0000007739 00000 п. 0000007885 00000 н. 0000008479 00000 н. 0000008843 00000 н. 0000009214 00000 п. 0000011394 00000 п. 0000012102 00000 п. 0000014768 00000 п. 0000014852 00000 п. 0000021948 00000 п. 0000022174 00000 п. 0000022385 00000 п. 0000022692 00000 п. 0000022805 00000 п. 0000042913 00000 п. 0000043129 00000 п. 0000043726 00000 п. 0000043820 00000 н. 0000057023 00000 п. 0000057244 00000 п. 0000057713 00000 п. 0000057853 00000 п. 0000057947 00000 п. 0000070796 00000 п. 0000071021 00000 п. 0000071447 00000 п. 0000071989 00000 п. 0000072075 00000 п. 0000073991 00000 п. 0000074218 00000 п. 0000074484 00000 п. 0000074627 00000 н. 0000074737 00000 п. 0000089656 00000 п. 0000089882 00000 п. 00000
00000 н. 00000 00000 п. 00000Преобразуйте лодку на гидравлическое рулевое управление
В комплектUflex входит все необходимое для преобразования рулевого управления с тросовым приводом на плавное гидравлическое.
Среди обновлений, которые вы можете сделать на своей лодке, чтобы увеличить время нахождения на воде, самая большая выгода для доллара — это замена тросовой системы рулевого управления на новую гидравлическую систему рулевого управления. Это сделает ваше судно более безопасным в эксплуатации, а в конце долгого дня вы будете меньше уставать от того, что вам не придется бороться с рулем с тросовым приводом. Если у вас есть старая лодка, которая изначально была оснащена двухтактным подвесным двигателем, а вы переоборудовали ее новым четырехтактным подвесным двигателем, ваша существующая система рулевого управления с тросом может не справиться с этой задачей.Дополнительный крутящий момент четырехтактного подвесного двигателя может оказаться слишком большим для руля с тросовым приводом.
Гидравлическая система рулевого управления действительно очень проста. Он состоит из насоса, который представляет собой штурвал, пары шлангов высокого давления и цилиндра, который крепится к подвесному двигателю. Рулевое колесо крепится к рулевому насосу, и, когда вы поворачиваете колесо, вы прокачиваете гидравлическую жидкость по шлангам для приведения в действие цилиндра, который вращает подвесной двигатель. Рулевой насос оборудован клапаном, который предотвращает возврат выходящей жидкости по тому же шлангу.Это также позволяет управлять системами рулевого управления с двумя станциями, например, с вышкой на вашей лодке, по которой вы можете двигаться с верхней станции. Важно выбрать гидравлическую систему рулевого управления, в которой размер насоса соответствует цилиндру. Рулевые насосы имеют разный объем масла, перемещаемого при каждом повороте рулевого колеса. Количество поворотов по правому и левому борту определяется соотношением объема цилиндра и производительности насоса. Соотношение 4,2: 1 кажется хорошим средним для большинства прогулочных судов.Рулевое колесо повернется 4,2 раза, прежде чем цилиндр полностью перевернется из стороны в сторону. Не рекомендуется использовать систему с числом оборотов меньше 4, так как для поворота рулевого колеса потребуется больше усилий. Система, требующая 8 оборотов и более, не годится, потому что отклик слишком медленный.
После того, как вы управляли лодкой с гидравлическим рулевым управлением, особенно при швартовке, преимущества очевидны. Несколько компаний производят комплект гидравлической системы рулевого управления в коробке со всеми необходимыми компонентами.Единственный выбор, который вам нужно сделать, — это длина шлангов, необходимых для протяжки от кормы руля до двигателя. Размер руля соответствует цилиндру, а комплекты поставляются с простыми в использовании инструкциями по установке, даже с гидравлическим маслом.
Новое гидравлическое рулевое управление чище и намного проще в эксплуатации.
Многие конфигурации системы рулевого управления могут включать несколько постов рулевого управления и двойные или тройные цилиндры. В этой статье мы сосредоточимся на лодке с одним постом управления и одним подвесным двигателем с передним креплением цилиндра.
Во-первых, начните с определения длины шлангов, которые вам понадобятся. Измерьте расстояние от руля до центра подвесного двигателя с учетом направления такелажа и некоторого провисания цилиндра из стороны в сторону. В отличие от системы рулевого управления с тросовым приводом, можно иметь небольшой дополнительный шланг, просто перевязав его в трюмной зоне или под консолью. Вооружившись этой информацией, вы сможете выбрать правильный комплект для вашей конкретной лодки. Снимая старую тросовую систему рулевого управления, начните с руля.Сначала снимите рулевое колесо, затем лицевую панель, крепление руля и руль. Ослабьте гайку, удерживающую трос в штурвале, и вращайте вал на штурвале, пока трос не освободится. Затем ослабьте гайку, которой кабель крепится к трубке наклона на подвесном двигателе, и вытяните кабель из трубки. Вытащить старый трос к корме намного проще; Внешний конец троса рулевого управления имеет прочный вал из нержавеющей стали, который не загибается в углах такелажной части. Перед тем, как вытащить трос, привяжите прочный кусок веревки небольшого диаметра к рулевому концу.Убедитесь, что он достаточно длинный, чтобы дотянуться до транца. Это будет ваша тяга, которая потянет вперед два новых гидравлических шланга.
Теперь, когда старая кабельная система снята, следуйте инструкциям по установке, прилагаемым к комплекту гидравлического рулевого управления. Внимательно следуйте инструкциям по удалению воздуха на каждом этапе, когда пришло время добавить гидравлическое масло и очистить систему от воздуха. Любой ярлык здесь приведет к неаккуратному рулевому управлению и настоящему беспорядку, когда вам придется прокачать систему второй раз, правильным способом.
Когда вы привыкли к тросовому рулевому управлению, вращение колеса с помощью гидравлической системы кажется забавным, как будто ничего не происходит. Не волнуйтесь, в третий или четвертый раз, когда вы обернетесь, чтобы увидеть, что ваш мотор действительно вращается, вы удивитесь, как вы вообще обходились без гидравлического рулевого управления.
СОВЕТЫ
Снятие рулевого колеса со старого троса штурвала можно выполнить без съемника. Ослабьте гайку, которая удерживает рулевое колесо на валу рулевого управления, пока верхняя часть гайки не будет заподлицо с верхом вала рулевого управления.Это защитит резьбу на валу. Потяните за руль, чтобы оказать давление вверх, и одновременно ударьте молотком по верхней части гайки.
Вал конический, и как только рулевое колесо немного сдвинется, оно освободится. Перед тем, как протянуть новые гидравлические шланги вперед, приложите небольшой нейлоновый шнур, который позже можно будет использовать в качестве тяги для проводки, датчика и т. Д.
Чтобы шланги могли проскользнуть через канавку такелажа, смажьте их тонким слоем растительного масла.Это позволит им легче скользить и будет меньше шансов натереть проволоку трением. ФС
Впервые опубликовано Florida Sportsman, январь 2015 г.
Не забудьте зарегистрироваться!
Получайте главные новости от спортсмена из Флориды каждую неделю на свой почтовый ящик
| Страна | Компания | Расположение | ОПЕ- пайки | Соотношение капитала | Партнеры по СП / Основные акционеры | Основные заказчики | Основные продукты (Примечания) |
| Корпорация JTEKT | |||||||
|---|---|---|---|---|---|---|---|
| Азия | |||||||
| Япония | Корпорация JTEKT Завод в Нара | Кашихара (Нара) | RM | Электроусилитель руля, Насосы с электроприводом для гидроусилителей рулевого управления, Гидравлический усилитель рулевого управления, Ручное рулевое управление | |||
| JTEKT Corporation Завод Тоёхаси | Тоёхаси (Айти) | M | Гидравлический усилитель руля, Ручное рулевое управление, Безопасные рулевые колонки | ||||
| JTEKT Corporation Завод в Ханазоно | Окадзаки (Айти) | M | Электроусилитель руля, Гидравлические насосы рулевого управления, ECU | ||||
| JTEKT Corporation Испытательный полигон JTECT Iga | Ига (Миэ) | R | |||||
| Fuji Kiko Co., ООО Завод Арай | Косай (Сидзуока) | M | 33,6 | Tachi-S Co., Ltd. 24,4 | Рулевая колонка | ||
| Koyo Machine Industries Co., Ltd. | Яо (Осака) | M | 100 | Промежуточные валы | |||
| CNK Co., Ltd. | Кария (Айти) | M | 100 | Валы рулевой рейки с гидроусилителем, Валы-шестерни, Муфты валов | |||
| Houko Co., ООО | Нуката-пистолет (Айти) | M | Крышки бачка гидроусилителя руля | ||||
| Китай | JTEKT (China) Co., Ltd. | Шанхай | H | 100 | Региональный офис | ||
| JTEKT Automotive (Tianjin) Co., Ltd. | Тяньцзинь | M | 95 (10) | (JTEKT (Китай) Co., Ltd.) 10, Toyota Tsusho Corporation 5 | Насосы гидроусилителя руля, CVJ, трубы бака | ||
| JTEKT Automotive Parts (Foshan) Co., Ltd. | Фошань | M | 100 | Трубки гидроусилителя | |||
| JTEKT рулевые системы (Сямынь) Co., Ltd. | Сямэнь | M | 95 (66,5) | (JTEKT (Китай) Co., Ltd.) 66,5 Toyota Tsusho Corporation 5 | Tianjin FAW Toyota, Dongfeng Nissan Passenger Vehicle, GAC Toyota | Электроусилитель руля | |
| JTEKT Automotive Science and Technology Center (Dalian) Co., Ltd. | Далянь | R | 100 (10) | (JTEKT (China) Co., Ltd.) 10 | Технический центр | ||
| Koyo Joint (XIAMEN) Co., ООО | Сямэнь | M | Промежуточные валы | ||||
| Индия | JTEKT Sona Automotive India Ltd. | Ревари, Харьяна | M | 60,9 (9,9) | (Sona Koyo Steering Systems Ltd.) 49 | Рулевое управление с гидроусилителем колонки | |
| Индонезия | PT.JTEKT Индонезия | Cikarang Barat, Bekasi | M | 100 (55) | (JTEKT (Таиланд) Co., Ltd.) 55 | рулевое управление, подшипники, муфты стартера | |
| Малайзия | JTEKT Automotive (Малайзия) SDN. BHD. | Шах Алам, Селангор Дарул Эхсан | M | 90 | UMW Toyota Motor Sdn.Bhd. 10 | Гидравлические системы рулевого управления с усилителем и насосами с моторным приводом, Ручное рулевое управление | |
| Таиланд | JTEKT (Таиланд) Co., ООО | Amphur Bangpakong, Chachoengsao | M | 95,8 | Тойота Цушо (Таиланд) Ко., Лтд. 2,9 | рулевое управление, карданные шарниры, подшипники, CVJ | |
| JTEKT Automotive (Thailand) Co., Ltd. | A.Pluakdaeng Rayong | M | 95 | Тойота Цушо (Таиланд) Ко., Лтд. 5 | Усилитель рулевого управления с колонкой, Гидравлические насосы, Муфты стартера | ||
| Koyo Joint (Таиланд) Co., ООО | Amphur Bangpakong, Chachoengsao | M | Промежуточные валы | ||||
| Корея | JTEKT Korea Co., Ltd. | Сеул | H | Региональный офис | |||
| Америка | |||||||
| Аргентина | JTEKT Automotive Argentina S.А. | Буэнос-Айрес | M | 100 (100) | (JTEKT Europe S.A.S.) 69,7 (JTEKT Automotive Brasil Ltda.) 30,3 | Гидравлические системы рулевого управления с усилителем и насосами с моторным приводом, Ручное рулевое управление | |
| Бразилия | JTEKT Automotive Brasil Ltda. | José dos Pinhais, Parana | MR | 100 (30,5) | (JTEKT Europe S.А.С.) 30,5 | Ручные рулевые приводы для рулевого управления с усилителем рулевой колонки, Технический центр | |
| США | JTEKT North America, Inc. | Плимут (Мичиган) | HR | 100 (100) | (Koyo Corp., США) 100 | Региональный штаб (рулевое управление), Технический центр | |
| JTEKT Automotive Tennessee-Vonore Co. | Воноре (Теннесси) | M | 100 (100) | (JTEKT North America, Inc.) 100 | Рулевое управление с электроусилителем, Рулевое управление с гидроусилителем и насосами с электроприводом, Ручное рулевое управление, Гидравлические шланги | ||
| JTEKT Automotive Tennessee-Morristown, Inc. | Морристаун (Теннесси) | M | 91,2 (91,2) | (JTEKT North America, Inc.) 91,2 Toyota Tsusho Corporation 8,8 | Гидравлические насосы, Масляные насосы для АЦ, Отливки | ||
| JTEKT Automotive Texas L.P. | Эннис (Техас) | M | 100 (100) | (JTEKT North America, Inc.) 95 (Koyo Machine Industries Co., Ltd.) 5 | Электроусилитель руля, Гидравлический усилитель рулевого управления с насосами с моторным приводом, Ручное рулевое управление, Гидравлические шланги, промежуточные валы | ||
| Европа | |||||||
| Чешский | JTEKT Automotive Czech Plzan, s.r.o. | Plzen-Skvrnany | M | 97,2 (97,2) | (JTEKT Europe S.A.S.) 100 | Электроусилитель руля, Ручное рулевое управление | |
| Франция | JTEKT Europe S.A.S. | Ириньи | HR | 97,2 | Рено 2,8 | Технический центр | |
| JTEKT HPI S.A.S. | Шенневьер-сюр-Марн Cedex | M | 97,2 (97,2) | (JTEKT Europe S.A.S.) 100 | Насосы для автомобилей и промышленного оборудования | ||
| JTEKT Automotive Dijon Saint-Etienne S.A.S. | Chevigny Saint Sauveur | M | 97,2 (97,2) | (JTEKT Europe S.A.S.) 100 | Гидравлический усилитель рулевого управления с насосами с приводом от двигателя | ||
| JTEKT Automotive Lyon S.В ВИДЕ. | Ириньи | M | 97,2 (97,2) | (JTEKT Europe S.A.S.) 100 | Рулевое управление с электроусилителем, Рулевое управление с гидроусилителем и моторным приводом, Рулевое управление с ручным управлением | ||
| Великобритания | JTEKT Automotive UK Ltd. | Нит (Западный Гламорган) | M | 100 | Ручные рулевые механизмы, Гидравлический насос в сборе, Производитель деталей моста | ||
| НСК Лтд./ NSK Steering Systems Co., Ltd. | |||||||
| Азия | |||||||
| Япония | NSK Steering Systems Co., Ltd. Завод Soja | Маэбаши (Гунма) | M | 100 | Электромеханическое рулевое управление со встроенной колонкой с электроусилителем, Рулевая колонка с электроусилителем, Рулевая колонка с электроусилителем наклона / телескопическая, Рулевое управление с электроусилителем шестеренчатого типа, Промежуточные валы скользящего типа, Шаровые роликовые направляющие | ||
| NSK Steering Systems Co., ООО Завод Акаги | Маэбаши (Гунма) | M | 100 | Электромеханическое рулевое управление со встроенной колонкой с электроусилителем, Рулевая колонка с электроусилителем, Рулевая колонка с электроусилителем наклона / телескопическая, Рулевое управление с электроусилителем шестеренчатого типа, Промежуточные валы скользящего типа, Шаровые роликовые направляющие | |||
| Корпорация ADTech | Синагава (Токио) | R | 51 | Корпорация Toshiba | |||
| Китай | NSK Steering Systems Dongguan Co., ООО | Дунгуань | M | 100 (89,5) | Производство автомобильных компонентов | ||
| NSK-WANDA Electric Power Assisted Steering Systems Co., Ltd. | Ханчжоу | M | 90 | Zhejiang Wanda Autoparts Co., Ltd. 10 | Производство автомобильных компонентов | ||
| NSK (China) Investment Co., ООО | Куньшань | H | Региональный офис в Китае | ||||
| Kunshan NSK Co., Ltd. | Куньшань | M | Производство автомобильных компонентов | ||||
| Индия | Rane NSK Steering Systems Ltd. | Бавал (Харьяна) | M | 51 | Группа Рейн 49 | Сузуки | Производство автомобильных компонентов |
| Гудуванчерри (Тамил Наду) | |||||||
| Таиланд | Siam NSK Steering Systems Co., ООО | Bangpakong (Chachoengsao) | M | 74,9 | Сиам Моторс 25,1 | Производство автомобильных компонентов | |
| Америка | |||||||
| США | NSK Steering Systems America, Inc. | Беннингтон (Вент) | M | 100 (100) | (Корпорация NSK) 100 | Производство автомобильных компонентов | |
| NSK Steering Systems America, Inc. Завод в Дайерсбурге | Дайерсбург (Теннесси) | M | |||||
| NSK Американский технологический центр | Анн-Арбор (Мичиган) | R | 100 | ||||
| NSK America, Inc. | Анн-Арбор (Мичиган) | H | Региональный офис | ||||
| Европа | |||||||
| Великобритания | NSK Europe Ltd. | Беркшир | H | Региональный офис | |||
| NSK Steering Systems Europe Ltd. | Беркшир | M | Производство автомобильных компонентов | ||||
| Польша | NSK Steering Systems Europe (Polska) Sp.Zo.O | Валбжих | M | 100 (100) | Производство автомобильных компонентов | ||
| Корпорация KYB | |||||||
| Азия | |||||||
| Япония | Корпорация KYB Завод в Гифукита | Кани (Гифу) | M | Усилитель руля, Амортизаторы, Гидравлическое оборудование автомобильное | |||
| Корпорация KYB Центр разработки и тестирования KYB | Кавабэ-чо, Камо-гун (Гифу) | R | |||||
| KYB Kanayama Co., ООО | Геро (Gifu) | M | Гидравлические лопастные насосы для гидроусилителя руля, Пластинчатые насосы для бесступенчатых трансмиссий, Компоненты электроусилителя рулевого управления | ||||
| Китай | KYB Industrial Machinery (Zhenjiang) Co., Ltd. | Чжэньцзян | M | 100 (100) | (KYB Trading (Shanghai) Co., Ltd.) 100 | Southeast (Fujian) Motor Industrial, Shanghai Volkswagen Automotive | Производство и продажа автомобильных товаров |
| KYB (China) Investment Co., ООО | Чжэньцзян | H | Региональный офис | ||||
| Европа | |||||||
| Германия | Штаб-квартира KYB в Европе, GmbH | Крефельд, Германия | H | Региональный офис | |||
| SHOWA Corporation | |||||||
| Азия | |||||||
| Япония | SHOWA Corporation Gotemba No.1 завод | Готемба (Сидзуока) | M | Honda, Suzuki, Mitsubishi, Subaru, Mazda, Daihatsu, Toyota, Nissan | Электроусилитель руля | ||
| SHOWA Corporation Завод Готемба №2 | Готемба (Сидзуока) | M | Детали рулевого управления с усилителем, Гидравлические системы рулевого управления с усилителем, Гидравлическое оборудование | ||||
| Центр исследований и разработок (Точиги) | Haga-gun Haga-machi (Tochigi) | R | НИОКР | ||||
| SHOWA Kyushu Corporation | Уки (Кумамото) | M | 100 | Производство спеченных компонентов | |||
| SHOWA Seiko Corporation | Хадано (Канагава) | M | 100 | Прецизионная обработка деталей, Титановое покрытие | |||
| Китай | Гуанчжоу Showa Autoparts Co., ООО | Гуанчжоу | M | 62,5 | Guangzhou Automobile Group Component Co., Ltd. 31,4 Kanematsu Corporation 6,1 | Амортизаторы для 4-колесной техники, Гидравлические и электрические рулевые системы | |
| Guangzhou Showa Autoparts Co., Ltd. Завод в Ухане | Ухань | M | Амортизаторы для 4-х колесной техники, Гидравлические усилители руля f | ||||
| Chengdu Ningjiang Showa Autoparts Co., ООО | Чэнду | M | 50 | Автомобиль China South Industries 50 | Амортизаторы для 2- и 4-колесных транспортных средств, Системы рулевого управления с электроусилителем | ||
| Таиланд | Showa Autoparts (Таиланд) Co., Ltd. | Ампур Шрирача (Чонбури) | M | 76 | Гидравлические и электрические системы рулевого управления, Амортизаторы для мотоциклов | ||
| Америка | |||||||
| Канада | Showa Canada, Inc. | Шомберг (ON) | M | 100 | Карданные валы, Гидравлические насосы рулевого управления, Системы рулевого управления с электроусилителем | ||
| США | American Showa, Inc. SunburyPlant | Санбери (Огайо) | M | 91,4 | American Honda Motor Co., Inc. 8,6 | Амортизаторы для 2- и 4-колесных транспортных средств, Детали гидроусилителя рулевого управления | |
| American Showa, Inc. Бланчестерский завод | Бланчестер (Огайо) | M | Детали рулевого управления с усилителем, Системы рулевого управления с электрическим и гидравлическим усилителем | ||||
| Мексика | Showa Autoparts Mexico, S.A. de C.V. | Estado de Guanajuato | M | 100 | Электроусилитель руля | ||
| Европа | |||||||
| Великобритания | Showa UK Ltd. | Абердэр, Мид Гламорган | M | 64,3 | Nissin Kogyo Co., Ltd. 35,7 | Toyota Manufacturing UK, Honda UK Manufacturing | Амортизаторы для 4-колесной техники, Гидравлические и электрические рулевые системы |
| Hitachi Automotive Systems, Ltd. Hitachi Ltd. 100% | |||||||
| Азия | |||||||
| Япония | Hitachi Automotive Systems Steering Co., Ltd. Головной офис / завод в Сайтаме | Hiki-gun Namegawa-machi (Сайтама) | M | Системы рулевого управления с электроусилителем, Системы рулевого управления с гидроусилителем, Механизмы рулевого управления с усилителем, Насосы рулевого управления с гидроусилителем | |||
| Hitachi Automotive Systems Steering Co., Ltd. Завод в Аките | Йокоте (Акита) | M | |||||
| Hitachi Automotive Systems Steering Co., ООО Завод в Ниигате | Тайнай (Ниигата) | M | |||||
| Китай | Hitachi Automotive Systems Products (Гуанчжоу) Ltd. | Гуанчжоу | M | 100 | Системы гидроусилителя руля, АБС | ||
| Тайвань | Компания TAMP Auto Parts Industrial Co., Ltd. | Пин-чэнь (Тао-Юань) | M | 62.1 | Системы гидроусилителя руля, Стойки | ||
| Таиланд | Hitachi Automotive Systems Asia, Ltd. | Ampur Plangyao (Chachoengsao) | M | 100 | Nissan, Митсубиси | Системы гидроусилителя | |
| TRW Automotive Japan Co., Ltd. | |||||||
| Япония | TRW Automotive Japan Co., ООО Инженерный центр | Иокогама (Канагава) | R | Nissan, Mazda, Honda, Mitsubishi, Toyota, Y-Tec, Кавада | Инженерный центр | ||
| TRW Automotive Japan Co., Ltd. Завод в Миёси | Миёси (Хиросима) | M | Усилитель руля | ||||
Тросы управления и рулевого управления лодки
Оптовая торговля рулевыми колесами и кабелями для морских катеров
Важным компонентом любого судна является система рулевого управления.Однако рулевые колеса катера и тросы управления катером не являются частью каких-либо рекомендаций по текущему техническому обслуживанию. Мы просто воспринимаем эти трудолюбивые детали как должное, пока они не состарятся и не потребуют замены. Этот день рождения различается для каждой лодки, однако Wholesale Marine советует, что, когда ваша лодка больше не управляется с той же легкостью, что и раньше, позвоните нам.
Тросы рулевого управления для новых характеристик и маневренности
Рекомендуется заменить тросы рулевого управления на лодке на те же, что и изначально.Это не только разумная практика, но и значительно упрощает процесс установки. Это может быть возможно даже для решительного мастера по установке. В оптовых магазинах морских судов есть кабели Teleflex для всех типов рулевых систем, а также комплекты систем рулевого управления Teleflex и NFB Pro, которые упрощают выполнение этой задачи. Если ваше судно более старое, и вы хотите модернизировать свою систему рулевого управления, сделайте домашнюю работу, а затем примите решение, поскольку ваша лодка будет управлять иначе и может представлять собой более сложную задачу, чем некоторые любители лодок могут согласиться.Каждый раз, когда вы меняете какой-либо компонент рулевого управления, будь то рулевое колесо катера или тросы управления катером, обязательно тщательно протестируйте новую систему на воде, пока вы не познакомитесь с новым способом маневрирования вашего судна.
Когда вы меняете рулевую систему, замените рулевое колесо лодки
Когда вы заменяете рулевую систему на лодке, возможно, пришло время модернизировать или заменить рулевое колесо вашей лодки. Хотя этот компонент обычно служит на протяжении всего срока службы судна, изменения в маневренности привели к изменению размеров рулевых колес судна.Современные колеса более компактны, имеют меньший радиус поворота рулевого колеса и, следовательно, занимают меньше места на приборной панели или в рулевой рубке. Некоторые из них сделаны из нержавеющих материалов, в то время как другие сохраняют классическую привлекательность яркого хрома по сравнению с нержавеющей сталью.
Независимо от вашего выбора, Wholesale Marine предлагает большой выбор судовых колес от Sea-Dog, Teleflex, SeaStar и JIF. У нас также есть группа ручек маневрирования, которые можно прикрепить к имеющемуся рулевому колесу для большего удобства передвижения по воде в бурном или спокойном море, и ручки управления для судов с приводом от переключения передач от Edson.Не знаете, какая система рулевого управления и тросы управления катером требуются вашей лодке? Предлагая решения для всех потребностей вашей лодки в управлении, компания Wholesale Marine предлагает полные системы рулевого управления Teleflex со стойкой и шестерней, поворотные системы рулевого управления и гидравлическую систему рулевого управления Baystar. Вы также найдете кабели управления от Teleflex. Пока вы занимаетесь этим, почему бы не обновить свой штурвал новыми рычагами управления, рулевыми ручками или рулевыми колесами от T-H Marine, Teleflex, JIF Marine? Позвоните нам, чтобы обсудить требования к вашей лодке сегодня по телефону (877) 388-2628.
Как работает рулевое управление катера
Лодочники часто не обращают внимания на систему рулевого управления лодки, если она ведет лодку в желаемом направлении. Проще говоря, система рулевого управления лодки определяет курс лодки при повороте рулевого колеса и, как и большинство других систем на лодке, требует регулярного осмотра, технического обслуживания и очистки в течение сезона плавания.
Рулевое колесо лодки — это часть руля, которая соединяется с механической, электрической или гидравлической системой, чтобы помочь в повороте лодки.Лодки с подвесными моторами управляются колесом, которое вращает весь привод; бортовые иногда используют гондол с прикрепленным винтом; В личном гидроцикле используются водометные двигатели с крыльчаткой, которые нагнетают воду в форсунку, которую оператор может повернуть в нужное русло. Некоторые современные корабли заменяют штурвал тумблером, который дистанционно управляет электрическим или гидравлическим приводом руля, с индикатором, который показывает рулевому угол в реальном времени.
Независимо от системы рулевого управления, используемой на лодке, вы можете рассматривать ее как однодневную аренду или расширенный чартер, неплохо было бы узнать, какой тип системы используется на лодке, понять, как она работает, где находится компоненты системы, и иметь возможность произвести простой ремонт, если рулевое управление сбивает вас с пути.
Рулевые системы состоят из колеса, руля, троса рулевого управления и кабельных соединений, соединяющих колесо с двигателем. Самым важным компонентом является штурвал, который преобразует вращательное движение колеса в двухтактное движение троса, в конечном итоге перемещая гребной винт вправо, влево или на мидель судна. Большинство штурвалов — поворотного типа, с использованием шестерен для поворота руля направления, описанного ниже.
- Редуктор : одна или две шестерни, которые входят в зацепление с рулевым барабаном для перемещения рулевого троса.Этим рулям требуется большая круглая сборка за приборной панелью, поэтому они часто не подходят для небольших переполненных приборных панелей (набор циферблатов и датчиков, аналоговых или цифровых, расположенных позади рулевого колеса или рядом с ним. просмотр для оператора частоты вращения и производительности двигателя, положения триммера, расхода топлива и сопутствующей информации).
- Планетарная передача : три или более шестерен, которые сцепляются с барабаном для перемещения троса. Такой дизайн занимает меньше места, поэтому подходит для лодок с небольшими приборными панелями.Этот тип имеет много точек износа и больший люфт колес, чем штурвалы редукторов.
Другой тип руля — реечный и шестеренный, в котором зубчатая передача установлена непосредственно на рулевом валу и зацепляется с реечной передачей в трубчатом корпусе, что значительно повышает эффективность рулевого управления. Основное различие между стойкой, шестерней и поворотным штурвалом заключается в том, как оборудование размещается за монтажной поверхностью.
Техническое обслуживание системы троса рулевого механизма на судне
Очень важно поддерживать трос рулевого механизма в хорошем рабочем состоянии.Следуйте приведенным ниже советам, чтобы обеспечить бесперебойную работу тросов рулевого управления, их отсутствие заедания и коррозии:
- Регулярно проверяйте трос рулевого механизма и соединения.
- Периодически очищайте и смазывайте кабельные фитинги и опоры консистентной смазкой. Используйте смазку морского класса на литиевой основе.
- При хранении лодки в течение длительного времени снимите соединение троса рулевого управления с двигателем, тщательно очистите и смажьте.
Рулевой трос надлежащей длины, без чрезмерных или крутых изгибов, обеспечивает оператору легкое управление на всех скоростях, повышает эффективность системы и снижает лишний люфт колеса и троса.Если рулевое управление становится жестким или нестабильным, режет отверстия или появляется коррозия на поверхности троса, немедленная замена — лучший выход.
Рулевое управление без обратной связи на судне
Относительно новая технология была разработана для устранения обратной связи по крутящему моменту двигателя на штурвале. В традиционных системах рулевого управления двигатель толкает лодку вправо, что требует от оператора компенсации, удерживая давление в колесах слева. Оборудование без обратной связи (NFB), прикрепленное к системе рулевого управления на штурвале, изолирует крутящий момент двигателя с помощью встроенной муфты, которая удерживает лодку на курсе без постоянной коррекции.По сути, муфта NFB изолирует крутящий момент двигателя, что значительно снижает утомляемость оператора и снижает вероятность ошибки при движении по курсу.
Что такое усталость руля
Значительный крутящий момент, создаваемый двигателями, создает нагрузку на систему рулевого управления, которая должна постоянно контролироваться оператором, даже когда лодка движется прямо. Если оператор утомляется, теряет трудоспособность или отпускает колесо во время движения, резкое изменение направления создает очень опасную ситуацию. Описанные выше системы без обратной связи призваны снизить утомляемость руля и сделать плавание на лодке более безопасным.
Вы когда-нибудь задумывались, почему посты управления находятся справа (правый борт) от лодки? Причина в гидродинамике, распределении веса и крутящем моменте двигателя. Гребные винты на лодках с одновинтовыми двигателями вращаются по часовой стрелке (влево), что, по сути, толкает судно вправо (правый борт). Чтобы противодействовать этому движению вправо (так называемому шагу гребного винта), конструкторы лодки расположили пост управления справа и примерно в средней части судна, чтобы вес оператора и рулевого оборудования утяжелял правый борт, компенсируя движение вправо. в какой-то степени.
Традиция руля: нанесение отметки на штурвал лодки
Во времена деревянных кораблей и парусиновых парусов моряки, укомплектовавшие штурвал, вытравляли канавки на спице судового колеса, перпендикулярной палубе (называемой спицей короля), когда руль был прямой. Канавки служили очень практической цели: ночью или при постоянном маневрировании рулевой мог быстро определить, что руль находится на миделе, просто нащупывая канавки на цапфе.
На протяжении веков водного транспорта традиция маркировать штурвал лодки для обозначения миделя судна сохранилась.Моряки разработали замысловатый декоративный узел, названный «голова турка», который обвязывался вокруг королевской спицы и использовался так же, как канавки для спиц, для обозначения миделя руля. Хотя голова турок все еще встречается на лодочных колесах и сегодня, более распространена стальная поворотная ручка, расположенная в том же месте, что и канавки для королевских спиц или головы турок. Ручка поворота не только указывает на то, что руль находится на миделе, но и обеспечивает значительное механическое преимущество при повороте рулевого колеса.
Хотя на лодке она в основном скрыта от глаз, хорошо обслуживаемая система рулевого управления обеспечивает средства для легкого и гибкого маневрирования и позволяет безопасно уйти с дороги и провести отличный день на воде.