
Принцип действия электродвигателей
MaxPlant
Принцип действия
Асинхронный двигатель с короткозамкнутым ротором
Обмотка ротора состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (беличья клетка).
Обмотка статора (обмотка возбуждения) питается от сети переменным током – образуется вращающееся магнитное поле,
которое индуцирует в обмотках ротора ток.
На проводники с током обмотки ротора со стороны магнитного поля обмотки возбуждения действуют электромагнитные силы —
образуется вращающий момент, увлекающий ротор за магнитным полем.
Частота вращения ротора не может достигнуть частоты вращения магнитного поля статора (поэтому электродвигатель и
называется асинхронным), в противном случае угловая скорость вращения магнитного поля относительно обмотки ротора
станет равной нулю и магнитное поле перестанет индуцировать в обмотке ротора ЭДС и создавать крутящий момент.
Асинхронный двигатель с фазным ротором
Синхронные электродвигатели
Обмотка статора (якорная обмотка) питается от сети переменным током – образуется вращающееся магнитное поле. На роторе находится индукторная обмотка, выведенная на контактные кольца. При пуске обмотки ротора закорачиваются накоротко или через реостат, и двигатель разгоняется в асинхронном режиме. После выхода на скорость, близкую к номинальной, индуктор запитывается постоянным током — создаётся постоянное магнитное поле, которое сцепляется с магнитным полем статора и начинает вращаться с ним синхронно (двигатель входит в синхронизм).
Режимы работы асинхронного двигателя
- Двигательный
- Генераторный
- Электромагнитного тормоза
Электродвигатель преобразует электрическую энергию, потребляемую из сети, в механическую.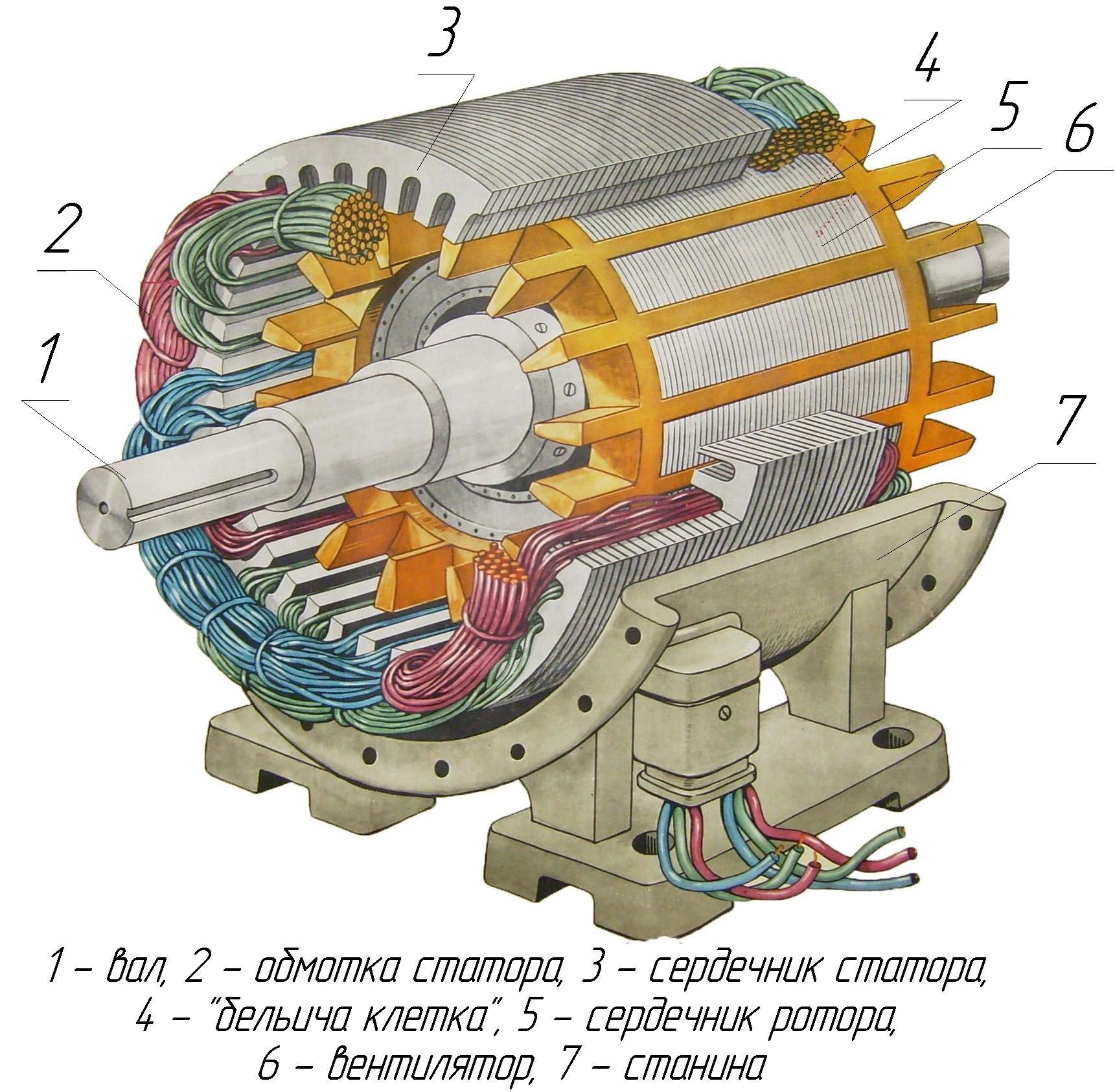
Асинхронный двигатель переходит в генераторный режим, если ротор начинает вращаться быстрее магнитного поля – на валу появляется тормозной момент. В этом режиме электродвигатель преобразовывает механическую энергию в электрическую и отдаёт её в сеть.
Асинхронный двигатель переходит в режим электромагнитного тормоза, если ротор и магнитное поле статора вращаются в разные стороны — на валу появляется тормозной момент, но двигатель при этом продолжает потреблять электроэнергию из сети — вся потребляемая энергия идёт на нагрев двигателя.
Способы регулирования скорости вращения асинхронного двигателя
- Реостатное
- Изменением числа пар полюсов
В многоскоростных двигателях, по-разному коммутируя обмотки статора, можно менять число пар полюсов, а значит и скорость вращения вала, т.к. скорость вращения магнитного поля пропорциональна числу пар полюсов. При этом способе сохраняется КПД и жёсткость механических характеристик, но снижается перегрузочная способность (которую можно сохранить, изменяя напряжение).
Недостатки: ступенчатое регулирование, высокая цена, большие габариты. - Частотное
В цепь ротора (двигателя с фазным ротором) вводятся добавочные сопротивления — механическая характеристика двигателя
становится мягче (ухудшается устойчивость работы, увеличивается скольжение), скорость снижается, при этом увеличивается
пусковой момент и сохраняется перегрузочная способность.
Недостатки: большие потери на реостате, скорость меняется скачками.
Для этого способа регулирования применяются преобразователи частоты.
Если при изменении частоты сохранять неизменным магнитный поток (а для этого мы должны поддерживать постоянным
соотношение U/f), то мы получаем семейство механических характеристик с одинаковой жёсткостью и перегрузочной способностью.
Преимущества: плавность регулирования, отличные экономические характеристики, возможность увеличивать частоту выше 50 Гц
(частоты сети).
Как выбрать электродвигатель
Обмотка ротора
- Короткозамкнутый ротор (беличья клетка)
- Фазный ротор: обмотка ротора выведена на контактные кольца, вращающиеся с валом двигателя. С помощью металлографитовых щёток в цепь ротора включается пуско-регулирующий реостат. С помощью этого реостата можно уменьшить пусковой ток и регулировать скорость вращения вала двигателя.
Обмотка статора, напряжение питания
Обмотка статора может быть соединена по схеме «звезда» или «треугольник».
Если на шильдике двигателя написано: 220/380, D/Y, то это значит, что двигатель можно включать в сеть с Uл = 220 В по схеме «треугольник»,
а с Uл = 380 В — по схеме «звезда».
Для IEC двигателей стандартное напряжение — 230/400 В, а для отечественных — 220/380 В.
Типоразмер
Типоразмер или габарит (Frame size) — это расстояние в миллиметрах «от пола» до оси вала двигателя. Типоразмеры отечественных двигателей (ГОСТ)
и импортных (IEC, NEMA) в общем случае не совпадают: наши двигатели ниже, чем импортные той же мощности.
Типоразмеры отечественных двигателей (ГОСТ)
и импортных (IEC, NEMA) в общем случае не совпадают: наши двигатели ниже, чем импортные той же мощности.
Материал корпуса (станины)
- Алюминий (Aluminium)
- Чугун (Cast Iron).
Коэффициент полезного действия (Efficiency)
КПД η равен отношению механической мощности на валу двигателя P2 к потребляемой из сети электрической мощности P1.
P1 = √3 х U х I х cos φ
P2 = M х n / 9,55
η = P2 / P1
Выходная мощность меньше входной на величину потерь.
Класс энергоэффективности
- EFF1 (High Efficiency motors)
- EFF2 (Improved Efficiency motors)
- EFF3 (Conventional Efficiency motors).
Монтажное исполнение
- Лапы (Foot) литые с корпусом или прикручиваемые
- Фланцы (Flange) с врезными отверстиями (малые фланцы) или со сквозными (большие фланцы)
- Комбинированные — лапы и фланец.

Конструктивное исполнение по способу монтажа электродвигателей
Класс защиты корпуса двигателя IP
Стандартная степень защиты электродвигателей — IP55.
Подробнее о расшифровке кодов IP
Скорость вращения
Скорость вращения магнитного поля двигателя (синхронная скорость):
n1 = 60f / p [об/мин],
где p — число пар полюсов двигателя,
f — частота сети (50 Гц).
- 2 полюса — 3000 об/мин
- 4 полюса — 1500 об/мин (стандарт)
- 6 полюсов — 1000 об/мин
- 8 полюсов — 750 об/мин
- 10 полюсов — 600 об/мин
- 12 полюсов — 500 об/мин.
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля:
n2 = n1(1 — s),
где s — скольжение.
Многоскоростные электродвигатели — это двигатели, у которых ступенчатое изменение скорости
реализовано с помощью переключения числа пар полюсов.
Температура окружающей среды и высота над уровнем моря
При установке двигателя выше 1000 метров над уровнем моря и при эксплуатации при повышенной температуре окружающей среды необходимо учитывать снижение (Derating) мощности двигателя (для этого есть специальные таблицы).
Класс нагревостойкости изоляции
- B — 130° С
- F — 150° С (достаточно для работы от преобразователя частоты)
- H — 180° С
Номинальные характеристики двигателя для всех классов изоляции указываются для температуры охлаждающей среды +40°С.
Подробнее о классах нагревостойкости изоляции
Режим нагрузки (Duty)
- S1 — продолжительный: двигатель работает при установившейся температуре
- S2 — кратковременный: двигатель не успевает нагреться до установившейся температуры, но во время остановки успевает полностью охладиться
- S3 — повторно-кратковременный: работа с постоянной нагрузкой чередуется с выключениями, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S4 — повторно-кратковременный с длительными пусками: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S5 — повторно-кратковременный с длительными пусками и электрическим торможением: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S6 — перемежающийся: работа с постоянной нагрузкой чередуется с работой на холостом ходу, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S7 — перемежающийся с длительными пусками и торможениями: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S8 — перемежающийся с периодическим изменением скорости вращения: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
Тепловая защита двигателя
- PTC-термисторы — это резисторы, сопротивление которых мгновенно возрастает при достижении заданной температуры.
 От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), например, 155°C.
Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), например, 145°C.
От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), например, 155°C.
Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), например, 145°C. - PT100 — платиновые датчики температуры обладают высокой стойкостью к окислению и большой точностью измерения.
PT100 подключаются по 2-х, 3-х или 4-х проводной схеме (чем больше проводов — тем меньше влияние помех).
От 3 до 6 датчиков PT100 могут устанавливаться в обмотку статора.
Для измерения температуры подшипников могут быть использованы ещё 2 датчика PT100. - KTY — кремниевые термодатчики с положительным коэффициентом сопротивления, характеризуются высокой линейностью характеристики, высоким быстродействием, надёжной твёрдотельной конструкцией и небольшой стоимостью.
Сервис-фактор
Двигатель с сервис-фактором 1.1 может постоянно работать с перегрузкой 10% от номинального выходного момента.
Класс по моменту (Torque class)
Класс по моменту показывает кратность пускового момента (при прямом пуске от сети) при пониженном на 5% напряжении:
- Класс 16 — 160%
- Класс 13 — 130%
- Класс 10 — 100%
- Класс 7 — 70%
- Класс 5 — 50%
Коэффициент мощности cos φ
Коэффициент мощности (cos φ) равен отношению потребляемой двигателем активной мощности к полной мощности.
Активная мощность расходуется на совершение полезной работы.
Полная мощность равна геометрической сумме активной и реактивной мощности.
Реактивная мощность расходуется на намагничивание двигателя.
Антиконденсационный нагрев
Для того, чтобы перед пуском двигателя в сыром помещении просушить обмотки есть два способа:
- Использовать двигатель со специальным встроенным нагревателем
- Подать на одну обмотку статора напряжение от 4 до 10% номинального (чтобы пропустить ток от 20 до 30% от номинального), что достаточно для испарения конденсата (применимо не для всех двигателей). Некоторые преобразователи частоты умеют это делать.
Охлаждение
- Поверхностное охлаждение (Non-ventilated: вентилятора нет)
- Самовентиляция (Self-ventilated: вентилятор на валу двигателя)
- Принудительное охлаждение (Forced cooling: независимый вентилятор или жидкостное охлаждение водой или маслом)
Для турбомеханизмов (вентиляторы и насосы, для которых момент на валу пропорционален квадрату скорости),
как правило, достаточно самовентиляции.
Двигатели, которые работают от преобразователей частоты с постоянным моментом длительное время на низких скоростях,
необходимо или переразмеривать, или обеспечить принудительным охлаждением.
Вентилятор
- Пластиковый
- Металлический
- Металлический с увеличенным моментом инерции
Требования к двигателю при работе от преобразователя частоты
- Температурный класс изоляции не ниже F
- Возможно принудительная вентиляция (см. выше)
- Изолированный подшипник с нерабочей стороны вала (рекомендуется для типоразмеров 225 и выше)
Подшипники
При работе от преобразователя частоты на частотах выше 50 Гц срок службы подшипников уменьшается.
У одних двигателей с рабочей стороны вала установлен плавающий подшипник (Floating bearing),
а с нерабочей стороны подшипник зафиксирован (Located bearing). У других — наоборот (для сочленения с редуктором, например).
У других — наоборот (для сочленения с редуктором, например).
В стандартном исполнении подшипники подпружинены в аксиальном направлении (вдоль вала) для обеспечения равномерной работы двигателя. У двигателей с радиально-упорными подшипниками такой пружины нет, поэтому радиальное усилие (перпендикулярно валу — от ремня, например) должно быть приложено постоянно, иначе подшипник быстро выйдет из строя.
Смазка
Как правило, для двигателей с типоразмерами до 250, работающих в номинальном режиме,
смазка рассчитана на весь срок службы подшипников.
Для пополнения смазки у двигателя должен быть предусмотрен специальный ниппель.
Вал двигателя
У двигателя может быть выведен второй конец вала двигателя, который может передавать как номинальный, так и меньший момент.
Второй конец вала несовместим с такими опциями как: датчик скорости и вентилятор принудительного охлаждения, а, возможно, и с тормозом.
Тормоз
При выборе тормоза необходимо учесть:
- Тип:
- статический (удерживающий тормоз срабатывает только при неподвижном вале)
- динамический (можно регулировать момент торможения, меньше изнашивается в случае аварийного торможения)
- Максимальную скорость, при которой возможно аварийное торможение
- Момент нагрузки
- Момент инерции
- Число пусков
- Напряжение питания: переменное (~220В) или постоянное (=24В)
- Скорость срабатывания: тормоз с выключением на DC-стороне срабатывает быстрее (для подъёмника, например), чем тормоз с выключением на AC-стороне (для конвейера)
Датчик скорости
Датчик скорости может находится герметично внутри корпуса (Incapsulated) или снаружи под защитной крышкой.
Сервопривод
Устройства плавного пуска
Асинхронный электродвигатель | ЭлектроСветоСервис
- Главная
- Новости
- Асинхронный электродвигатель
Асинхронный электродвигатель наиболее распространённый преобразователь электричества в механическую энергию, которую можно использовать практически во всех производственных процессах. В асинхронном электродвигателе используются также само, как и в двигателях на постоянный ток, электромагниты на каждой фазе. Выполнено это достаточно просто, за счёт прокладки в специальных пазах шихтованного железа токопроводящих проводников. Причём заложенный в одном пазу проводник будет заходить в следующий паз по кругу через пять пазов, а далее токопроводник будет возвращаться на два паза назад.
Таким образом, одним токопроводником выполнено на одной фазе круговые электромагниты, заложенные в специальные пазы. Такие электромагниты изготавливаются на каждой фазе и закладываются в железо статора, по прямым пазам зачастую изолированных от железа, при помощи электрокартона и пропитанного шерлаком или бакелитовым лаком.
Такие электромагниты изготавливаются на каждой фазе и закладываются в железо статора, по прямым пазам зачастую изолированных от железа, при помощи электрокартона и пропитанного шерлаком или бакелитовым лаком.
Ротор асинхронного электродвигателя выполнен по принципу беличьего колеса, которое состоит из пазов в шихтованном металле, в которых расположены токопроводники закороченные с одной стороны и выведенные на коллектор — для асинхронного двигателя с фазным ротором.
Но наиболее часто применяется асинхронный двигатель с короткозамкнутым ротором, в этом двигателе ротор состоит также само из изолированных от железа токопроводных пазов, но которые закорочены с двух сторон ротора. При запуске асинхронного электродвигателя с короткозамкнутым ротором остаточное намагничивание железа ротора позволяет создать в короткозамкнутых токопроводящих проводниках электрический ток. Который, взаимодействуя и усиливаясь с магнитным полем, созданным трёхфазными электромагнитами в обмотке статора приводят к разгону электродвигателя на номинальные обороты.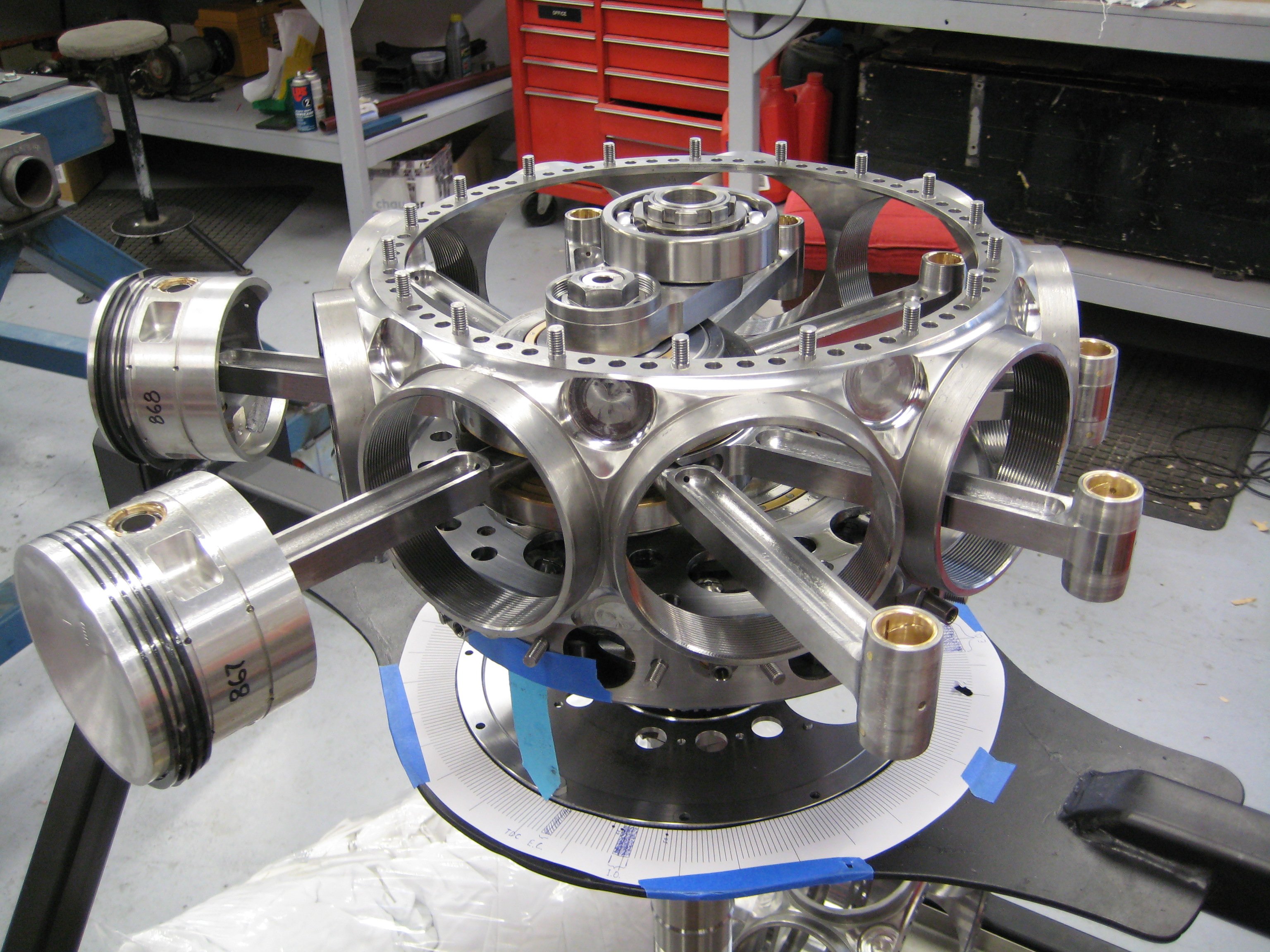 Для более щадящего режима запуска и работы асинхронного двигателя с короткозамкнутым ротором»беличье колесо»токопроводящей обмотки ротора немного сдвигается от прямолинейных линий.
Для более щадящего режима запуска и работы асинхронного двигателя с короткозамкнутым ротором»беличье колесо»токопроводящей обмотки ротора немного сдвигается от прямолинейных линий.
Асинхронный двигатель с фазным ротором зачастую использовался в электродвигателях, которые устанавливались на оборудовании где затяжной пуск или необходимо регулировать обороты и момент на валу. Для того чтобы регулировать обороты и момент на валу в цепь фазного ротора через коллектор и щётки подсоединялись активные сопротивления. Что позволяло регулировать обороты и мощность при помощи их подключения или отключения в нужный режим. Также данные сопротивления в цепи ротора использовались для динамического торможения, которые широко востребованы в мощных крановых установках. В настоящее время данный вид двигателей используется крайне редко, так как они достаточно громоздкие и при этом требуют специализированного обслуживания за счёт наличия в них перехода коллектор — щётки.
Асинхронные электродвигатели с короткозамкнутым ротором используются повсеместно. Наряду с основным преимуществом, связанным с дешевизной и надёжностью в данных двигателях до недавнего времени был основной недостаток — это отсутствие регулировки мощности и оборотов. То есть данные двигатели работали на номинальных оборотах постоянно и способны были выдавать на вал номинальную мощность. Если на валу двигателя практически нет механической нагрузки, он работает в режиме холостого хода и потребляет электроэнергии не на много меньше, чем при работе на номинальной нагрузке.
Наряду с основным преимуществом, связанным с дешевизной и надёжностью в данных двигателях до недавнего времени был основной недостаток — это отсутствие регулировки мощности и оборотов. То есть данные двигатели работали на номинальных оборотах постоянно и способны были выдавать на вал номинальную мощность. Если на валу двигателя практически нет механической нагрузки, он работает в режиме холостого хода и потребляет электроэнергии не на много меньше, чем при работе на номинальной нагрузке.
Следует также отметить, что при большой нагрузке на валу, которая значительно выше номинальной мощности выдаваемой двигателем, значение скольжения возрастает, что может привести к тому и приводило, что двигатель выходит с режима синхронизации. Так что при выборе любого электрооборудования независимо от того электродвигатель это или коммутационное, осветительное или защитное, необходимо всегда закладывать в его мощность небольшой запас по мощности.
В настоящее время асинхронные электродвигатели получили возможность использоваться в качестве регулируемых по оборотам и мощности на валу источников механической энергии. Осуществляется это за счёт применения частотных преобразователей, выполненных с применением современных силовых транзисторов. Для того чтобы регулировать обороты и самое главное мощность с изменением потребляемой мощности от сети, частотные преобразователи имеют возможность изменять номинальное напряжение и частоту сети в достаточно широких диапазонах. Что позволяет без потери электричества поступающего из сети регулировать обороты и мощность на валу электродвигателя за счёт программного изменения выходного напряжения с соответствующей частотой с частотного преобразователя.
Осуществляется это за счёт применения частотных преобразователей, выполненных с применением современных силовых транзисторов. Для того чтобы регулировать обороты и самое главное мощность с изменением потребляемой мощности от сети, частотные преобразователи имеют возможность изменять номинальное напряжение и частоту сети в достаточно широких диапазонах. Что позволяет без потери электричества поступающего из сети регулировать обороты и мощность на валу электродвигателя за счёт программного изменения выходного напряжения с соответствующей частотой с частотного преобразователя.
- Онлайн подбор светильника
- Консультация
- Оптовым клиентам
- Оценим смету
Этот 12-роторный роторный двигатель просто дикий
Невероятные роторные конструкции — традиция энтузиастов. Поскольку было выпущено так мало роторных автомобилей, автопроизводители не полностью использовали ограничения типа двигателя. Именно тюнеры построили для нас большие роторные двигатели с турбонаддувом, четырехроторные двигатели и даже сборки с шестироторными двигателями. Но этот может превзойти их всех. Кто-то построил двенадцатироторный двигатель, и это так же смешно, как и звучит.
Именно тюнеры построили для нас большие роторные двигатели с турбонаддувом, четырехроторные двигатели и даже сборки с шестироторными двигателями. Но этот может превзойти их всех. Кто-то построил двенадцатироторный двигатель, и это так же смешно, как и звучит.
Тайсон Гарвин из Apex Manufacturing and Design придумал и воплотил эту идею в жизнь, но мы узнали об этом в последнем видео Роба Дама. Дам, который сам знаком с дикими роторными автомобилями, приносит Гарвина и его двигатель в мастерскую для глубокого погружения. Двигатель гигантский, великолепный и совершенно абсурдный. Но он создан для абсурдной задачи: гонок на скоростных лодках.
Посмотреть полный пост на YoutubeПохожие истории
- Hoonicorn Кена Блока против RX-7 Роба Дама X-7 на дороге
Гарвин и его команда, как и большинство гонщиков на скоростных лодках, использовали двигатели Big Block Chevy в качестве основы. Но, по его словам, независимо от того, как вы его строите, есть слабые места, которых нельзя избежать.
«Мы сделали все, что можно сделать с помощью Big Block Chevy», — сказал Гарвин. «Если вы купили лучшие детали и были лучшим настройщиком, все равно есть детали, которые сломаются, например пружины клапанов. Вы сгибаете металл вперед и назад, и они сломаются, независимо от того, как вы его изготовите».
Его решение было нестандартным.
«Вращающийся двигатель не знает настоящих отказов», сказал он. «Например, концевые уплотнения могут изнашиваться, вещи могут изнашиваться, но нет ничего, что могло бы сломаться для удовольствия, как у Big Block Chevy. Вы можете получить столько мощности от Big Block Chevy только в течение нескольких часов подряд с полностью открытой [дроссельной заслонкой], поэтому мы начали измерять Big Block Chevy и посмотреть, сколько роторов мы можем поместить на место. В конце концов, мы придумали эту конструкцию, которая является точной формой Big Block Chevy […] .»
В результате получился огромный, красивый и замысловатый двигатель. Один набор роторов вращается назад, чтобы помочь сбалансировать гармоники и сделать выхлопную и впускную установку симметричными из стороны в сторону. Текущая установка запускает задний и передний роторы одновременно, так что нет необходимости в противовесах, хотя Гарвин отмечает, что гибкость настройки ротора означает, что вы можете запускать практически любое время, которое захотите. Вы просто должны сбалансировать это.
Один набор роторов вращается назад, чтобы помочь сбалансировать гармоники и сделать выхлопную и впускную установку симметричными из стороны в сторону. Текущая установка запускает задний и передний роторы одновременно, так что нет необходимости в противовесах, хотя Гарвин отмечает, что гибкость настройки ротора означает, что вы можете запускать практически любое время, которое захотите. Вы просто должны сбалансировать это.
К сожалению, его размер создал некоторые проблемы, которые, похоже, не полностью решены. Хотя двигатель работал раньше, он работал с карбюратором, который заглушал его до пиковой мощности. Гарвин говорит, что у него не было программного обеспечения для управления двигателем, которое могло бы управлять 24 отдельными синхронизациями для 24 форсунок, а системы управления двумя двигателями V-12 имели некоторые ограничения. Тем не менее, он получил одну впечатляющую цифру: двигатель развивает крутящий момент 800 фунт-футов при 2000 об / мин и может вращаться за 9000 об/мин.
Охлаждение и вентиляция, безусловно, вызовут проблемы, но Garvin, похоже, справится. И у ротации тоже есть законная причина. В дополнение к отсутствию точек отказа — вам не нужны клапаны на роторном двигателе — необходимость его работы с полностью открытой дроссельной заслонкой в течение нескольких часов звучит как твердая почва для роторной конструкции, которая обычно лучше всего работает на высоких оборотах. Тем не менее, теперь, когда он в руках Роба Дама, мы ожидаем, что в конечном итоге он превратится в довольно интересную сборку автомобиля. Когда это произойдет, мы обязательно сообщим вам об этом.
Через Carbuzz.
Мак Хоган
Редактор обзоров
Возможно, самый непостоянный член штата Road & Track, редактор обзоров Мак Хоган, вероятно, единственный человек, который когда-либо покупал ND Miata с Isuzu Vehicross. Он основал раздел автомобильных обзоров CNBC на втором курсе колледжа и с тех пор пишет об автомобилях.
Разборка 12-роторного роторного двигателя мощностью 5000 л.с.
Как раз тогда, когда вы думали, что роторный двигатель Ванкеля не может быть более диким, странным или замечательным, появляется парень, который находит способ вставить несколько дополнительных роторов в двигатель без распределительного вала.
Возможно, именно уникальные возможности (и ограничения) самого двигателя заставляют руки и умы самых творческих инженеров мира возиться с этой альтернативой без поршня. Возможно, это вызов — взять что-то, что никогда не планировалось увеличивать в размерах, и все равно сделать это, просто чтобы посмотреть, сработает это или нет. Или это может быть запоздалая разработка нового роторного двигателя Mazda, которая заставила нас искать современное решение проблем, обнаруженных в несуществующей RX-8?
Какова бы ни была причина, многие уже давно ощущают необходимость усовершенствовать традиционную вращающуюся конструкцию до чего-то большего. Это подводит нас к сегодняшней теме полнейшего излишества: 12-роторный двигатель с безумной предысторией катания на лодках и коджоны размером с золотой киви.
Это подводит нас к сегодняшней теме полнейшего излишества: 12-роторный двигатель с безумной предысторией катания на лодках и коджоны размером с золотой киви.
Фото предоставлено Робом Дамом/YouTube
Вы должны подождать, чтобы повернутьсяТаким образом, несмотря на то, что культовый двигатель Mazda 13B по-прежнему широко почитается как последнее великое чудо современной роторной техники, присущие ему недостатки не менее широко известны. В то время как некоторые предполагают, что недостатки роторного двигателя являются лишь частью его ДНК, другие утверждают, что именно хорошо задокументированные ошибки, допущенные в сообществе послепродажного обслуживания, стали причиной того, что ротор Ванкеля получил такую плохую репутацию. В любом случае, люди склонны приукрашивать все истории успеха роторных двигателей в пользу ужасных, потому что… ну… драма продается.
Но это еще одна обличительная речь в другой раз. Сегодня мы обсуждаем то, что, если будет доказано теоретически правильное и абсолютно безопасное использование до предела, может войти в историю как величайший роторный двигатель в истории. Двигатель, имеющий очень мало общего с традиционными роторными двигателями Mazda, знакомыми многим из нас, но все же обладающий всеми преимуществами роторной конструкции Ванкеля.
Двигатель, имеющий очень мало общего с традиционными роторными двигателями Mazda, знакомыми многим из нас, но все же обладающий всеми преимуществами роторной конструкции Ванкеля.
Фото: Роб Дам/YouTube
Для ветерана YouTube Роба Дама это был момент, которого он ждал 0033 очень долго. Энтузиаст роторных двигателей, владелец магазина и звезда YouTube давно задокументировал свои автомобильные подвиги, будь они успешными, недолговечными или просто субъективными.
Но по множеству причин парню так и не удалось преодолеть порог квадрокоптера. Поэтому, когда с Дамом связался парень, который заявил, что может «одолжить» восторженному автолюбителю уникальный двигатель с двенадцатью роторами, вам лучше поверить, что ситуация обострилась довольно быстро.
Фото предоставлено Робом Дамом/YouTube
Ротари-полубог по замыслу Как только он понял, что этот 15,7-литровый зверь действительно один массивный двигатель, Дам заметил, что в двигателе используется гораздо меньшая конфигурация корпуса ротора, чем предполагалось на онлайн-изображениях. По словам Тайсона Гарвина, человека, который в первую очередь отвечал за проектирование и создание этого крутого громилы, сверхтонкий корпус использовался исключительно в целях очистки. Гарвин объясняет, что меньшая занимаемая площадь, чем изначально изготовленная Mazda с трехроторным корпусом оригинальной комплектации, была обязательной из-за уникальной формы и размера двигателя.
По словам Тайсона Гарвина, человека, который в первую очередь отвечал за проектирование и создание этого крутого громилы, сверхтонкий корпус использовался исключительно в целях очистки. Гарвин объясняет, что меньшая занимаемая площадь, чем изначально изготовленная Mazda с трехроторным корпусом оригинальной комплектации, была обязательной из-за уникальной формы и размера двигателя.
О, но я забегаю вперед. Думаю, можно с уверенностью предположить, что некоторые из вас не знакомы с этим проектом «сделай сам», о котором мы рассказывали ранее. Итак, давайте быстро введем вас в курс дела с помощью небольшой предыстории.
По словам Гарвина, весь этот проект начался еще в 2010 году, когда его любовь к гонкам на скоростных катерах привела к поиску новых вариантов силовой установки. В течение десятилетий лодки, на которых он гонялся, приводились в движение сильно модифицированными двигателями Chevy с большими блоками. Но одна неудача за другой преследовала энтузиаста лодочного спорта, и Тайсон Гарвин оказался вынужден мыслить нестандартно.
Фото: Роб Дам/YouTube
То, на чем он остановился, было, вероятно, самым далеким от прямого. С помощью нескольких приятелей-лодочников Гарвин остановился на роторном двигателе в качестве своей колесницы. Двигатель, который мог бы создать в общей сложности 5000 лошадиных сил, если бы его правильно толкали и настраивали, но с более низким диапазоном мощности, который мог бы работать плавно и очень круто в течение нескольких часов подряд в открытой воде.
В результате был изготовлен Y-образный 15,7-литровый трехроторный двигатель объемом 960 кубических дюймов, который был почти полностью изготовлен из алюминия и почти бесконечно масштабировался по размеру и производительности. При весе около 830 фунтов, длине 76 см (29,9 дюйма), ширине 80 см (31,5 дюйма) и высоте 61 см (24 дюйма) творение Гарвина имело площадь основания (и схему крепления болтов) большого блока Chevy, но внутри было начинено дюжиной роторов.
Большинство людей думали, что это всего лишь макет, но это работающий двигатель.
— Тайсон Гарвин
Фото предоставлено Робом Дамом/YouTube
Возможно, на это ушло почти четыре года или около того, но Гарвину и его ребятам удалось взяться за всю работу по проектированию и механической обработке двигателя. В то время как почти все в сборке носит единичный характер, сами роторы остаются единственной важной частью двигателя, которая исходит прямо из 2-роторного агрегата Mazda 13B.
В итоге Гарвин и его команда получили двигатель с тремя рядами равномерно распределенных четырехроторных конструкций, все в Y-образной конфигурации. Используя алюминий 7075 в качестве предпочтительного материала для большей части двигателя, Гарвин смог построить корпус, который можно было разобрать на вертикальные «кусочки». Более прочный и твердый, чем другие формы алюминия, этот сплав обладал дополнительным преимуществом, заключающимся в том, что его можно было полировать до более яркого блеска. Отсюда двигатель, «побрякивающий» в отделе отражения.
Фото: Роб Дам/YouTube
С точки зрения конструкции каждая секция Y-образного алюминиевого корпуса двигателя идентична следующей. Таким образом, вы можете увеличить или уменьшить размер силовой установки по мере необходимости, что делает возможными конфигурации с 6, 9, 12, 15 или более роторами. Черт, вы даже можете выбрать короткий 3-роторный двигатель, если вам нужно сэкономить место, это действительно ваш выбор.
Таким образом, вы можете увеличить или уменьшить размер силовой установки по мере необходимости, что делает возможными конфигурации с 6, 9, 12, 15 или более роторами. Черт, вы даже можете выбрать короткий 3-роторный двигатель, если вам нужно сэкономить место, это действительно ваш выбор.
В этом пакете также имеется тонны механически обработанных портов, предназначенных для обеспечения достаточного потока для системы смазки с сухим картером. Кроме того, внутри водяной рубашки были сделаны дополнительные карманы, позволяющие жидкости достигать всех портов охлаждения на нижнем конце за счет использования двойных впускных каналов и сквозной конструкции от одного конца до другого.
И хотя проектирование, поиск запчастей, разработка и испытания этого двигателя заняли годы, Гарвин каким-то образом смог это осуществить. Гарвин говорит, что, если не считать небольшой поломки при обработке, он ничего не изменит в двигателе, и мы не можем не согласиться с этим. Серьезно, просто посмотрите на это. Весь этот единственный в своем роде 12-роторный Y-образный двигатель практически безупречен с точки зрения производства!
Весь этот единственный в своем роде 12-роторный Y-образный двигатель практически безупречен с точки зрения производства!
Фото: Роб Дам/YouTube
Деконструкция божестваДля тех из вас, кому интересно, да, этот двигатель работает. И да, он был протестирован на динамометрическом стенде. На самом деле, первый сеанс динамометрического стенда был проведен, когда карбюратор еще был прикреплен к двигателю, который вы можете посмотреть здесь. Судя по всему, в то время не было ЭБУ, который мог бы безопасно и адекватно управлять 24 форсунками и всеми катушками, которые шли вместе с ними. Таким образом, Гарвин использовал пару компьютеров Jaguar V12 для стороны зажигания, что привело к созданию крутящего момента около 800 фут-фунтов при 2000 об / мин в безнаддувной версии.
Кроме того, 497 лошадиных сил были произведены всего лишь при 3200 об/мин, а оптимальная точка между 8500 и 9000 об/мин почти утроила эти показатели. Но, несмотря на то, что Гарвин перестраховывался и выключал динамометрический стенд, прежде чем выводить двигатель на максимальный потенциал, он говорит, что полный газ приведет к тяге на 14 000 об/мин.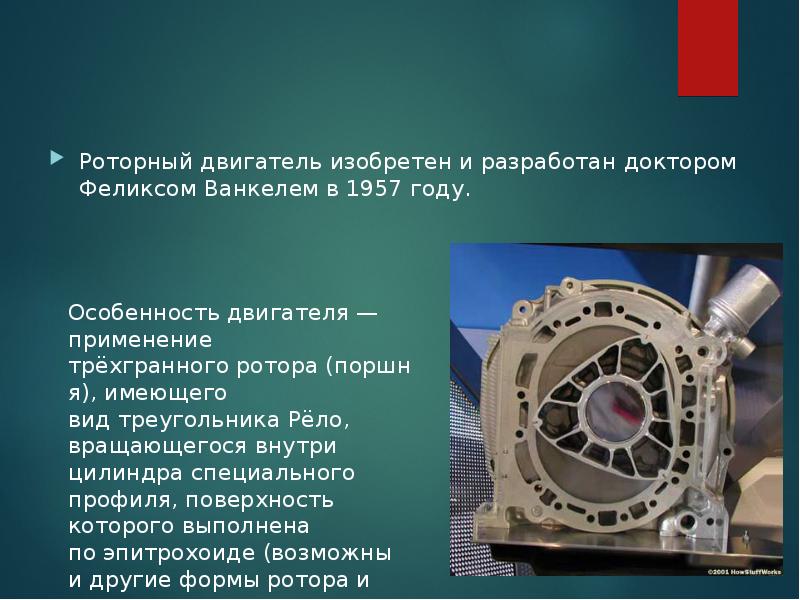
Тайсон Гарвин настроил группу роторов так, чтобы они вращались назад, тем самым устранив проблемы NVH и позволив двигателю оставаться симметричным как по форме, так и по размеру. Кредит Фотографии: Роб Дам/YouTube
Возвращаясь к физической стороне дела, все три кривошипа прикреплены к изготовленным на заказ шестерням для управления синхронизацией, а меньшая центральная шестерня получает смазочный узел под давлением, чтобы его высокоскоростные подшипники всегда были должным образом смазаны. Говоря о смазке, по-видимому, некоторые из внутренних смазочных отверстий должны были быть обработаны настолько точно, что для очистки других отверстий требовались микрочастицы.
С тремя блоками, теперь вмещающими по четыре ротора, и двумя верхними блоками, соединенными с нижним блоком через шестерни в задней части и интегрированный выходной вал, вращение в противоположном направлении относительно центрального блока может обеспечить правильное выравнивание выхлопной стороны двигателя. Гарвин быстро признал, что ему не нравился вид перекошенного двигателя, поэтому симметрия всего проекта должна была быть на высоте.
Гарвин быстро признал, что ему не нравился вид перекошенного двигателя, поэтому симметрия всего проекта должна была быть на высоте.
Объем двигателя составляет 480 кубических дюймов при однократном срабатывании каждого ротора, как рассчитано для роторного двигателя. Это 960 кубических дюймов, если рассчитать как большой блок с двумя оборотами кривошипа, и 1440 кубических дюймов, если вы запустите каждую сторону ротора. — Тайсон Гарвин
Еще больше безумия добавляет тот факт, что в двигателе не используются противовесы. Вместо этого двигатель полагается на положение каждого ряда роторов, чтобы компенсировать другое. Частично это достигается за счет зубчатой передачи с натяжным роликом, обеспечивающим вращение в том же направлении, что и главный вал. Единственная хитрость здесь заключается в том, что вы должны запускать два банка одновременно, чтобы компенсировать/сбалансировать противоположный конец. Что, как красноречиво объясняет Роб Дам, похоже на превращение конструкции с четырьмя роторами в конфигурацию кривошипа с плоской плоскостью.
Фото: Роб Дам/YouTube подшипники на место после их установки по окружности каждого вала. Тайсон дополнительно усовершенствовал этот чудовищный роторный двигатель, предоставив каждому электронному валу возможность полностью разбирать и перенастраивать для дальнейшей регулировки фаз газораспределения по мере необходимости.
Что касается проблем с температурой, Тайсон говорит, что дико круто работает этот мотор. С другой стороны, для смазки требуется монолитный блок с пятью ступенями продувки, оснащенный масляным фильтром, который обязательно имеет собственный почтовый индекс, и шлицевым приводом на задней стороне для механического топливного насоса. И да, пришлось использовать специальные силиконовые уплотнения с тоннами специального силиконового клея, чтобы склеить все это вместе.
Смазка и заправка этого 12-роторного двигателя впечатляют. Смазка осуществляется с помощью внешнего насоса с пятью ступенями продувки, который оснащен шлицевым приводом на задней стороне для крепления механического топливного насоса, который, в свою очередь, питает целую армаду блоков Injector Dynamics ID2200. Кредит Фотографии: Роб Дам/YouTube
Кредит Фотографии: Роб Дам/YouTube
В конце концов, Гарвин разработал этот двигатель, основной задачей которого было плавание на лодке, и мы говорим не только о гонках на скоростных лодках. Будь то круизы выходного дня на 1400 лошадиных силах с октановым числом 87 или удвоение мощности в день гонки до 2400 лошадиных сил благодаря паре турбонагнетателей, этот двигатель был создан для перенастройки.
В какой-то момент даже поговаривали о том, чтобы увеличить наддув до 25 фунтов и добавить немного гоночного сока внутрь, чтобы посмотреть, достижимы ли 3600 лошадиных сил. Если будет доказано, что он работает безопасно и надежно, двигатель можно будет увеличить до 50 фунтов наддува, в результате чего мощность составит более 5000 лошадиных сил!
Фото: Роб Дам/YouTube
Так что да, это действительно сборка Франкенштейна в чистом виде. Быстро просмотрите обновления сборки на странице 12-роторного двигателя в Facebook, и вы найдете множество подтверждающих доказательств, подтверждающих эту точку зрения. Это возвращает нас к тому, почему Тайсон Гарвин так любезно «подарил» этот великолепный мотор Робу Даму.
Это возвращает нас к тому, почему Тайсон Гарвин так любезно «подарил» этот великолепный мотор Робу Даму.
Обоим мужчинам очень любопытно посмотреть, что может предложить этот мотор, когда он реконфигурируется и работает с максимальным потенциалом. Таким образом, с бесконечными порядками запуска для каждого блока роторов, что дает одинаково бесконечные возможности настройки и диапазона мощности, а Дам всегда ищет новый забавный роторный проект, мы планируем внимательно следить за загрузками Дама на YouTube в ближайшие месяцы.
Пусть это будет последовательно, в тандеме или в любой промежуточной комбинации, пришло время попрощаться с фиксированным временем! По словам Гарвина, все, что сейчас нужно этой силовой установке, — это несколько новых уплотнений законцовок, некоторые работы по измерению зазора несущего винта и небольшая настройка, чтобы она снова была готова к стрельбе. Теперь, что касается шасси, в которое Дам планирует впихнуть этот полубог мотора, это остается такой же загадкой, как и окончательная мощность, которую будет производить этот 12-роторный мотор.