
Принцип работы электрических машин
Классификация электрических машин
Классифицируют электрические машины по назначению, принципу действия и роду тока, мощности, по частоте вращения.
Классификация по назначению
Электрические машины по своему назначению подразделяют на:
- Электромашинные генераторы. Они выполняют преобразовании энергии механической (вращение) в электрическую. Они устанавливаются на электрических станциях, автомобилях, самолетах, тепловозах, передвижных электростанциях, кораблях и в других установках. На электростанциях генератор приводят в движение мощные паровые турбины, на автомобилях, тепловозах и прочих транспортных средствах – газовые турбины или двигатели внутреннего сгорания. Генераторы очень часто используют в качестве источников питания в различных установках связи, автоматики и измерительной техники и в других системах.
- Электрические двигатели – выполняют функции обратные генератору, а именно, преобразуют электрическую энергию в механическую.
- Электромашинные преобразователи – выполняют преобразования электрических величин. Например, могут преобразовывать постоянный ток в переменный и наоборот, изменять частоту, число фаз и другие функции. В связи с активным внедрением полупроводниковых преобразователей электромашинные преобразователи в новых проектах используют крайне редко (практически никогда), а уже установленные электромашинные преобразователи активно модернизируются полупроводниковыми (тиристорными и транзисторными).
- Электромашинные компенсаторы – осуществляют регулирование коэффициента мощности cos φ, а именно баланса реактивной мощности в сети.
- Электромашинные усилители – используют для объектов большой мощности.
 Это, своего рода усилители, они усиливают сигналы большой мощности, при этом управление ведется сигналами малой мощности. Роль этих усилителей, как и электромашинных компенсаторов, в современном мире практически сведена на нет из – за применения полупроводниковых усилителей (транзисторных и тиристорных).
Это, своего рода усилители, они усиливают сигналы большой мощности, при этом управление ведется сигналами малой мощности. Роль этих усилителей, как и электромашинных компенсаторов, в современном мире практически сведена на нет из – за применения полупроводниковых усилителей (транзисторных и тиристорных). - Электромеханические преобразователи сигналов – это, как правило, электрические микромашины (например, сельсины), которые довольно широко используют в системах автоматического управления.
Классификация по роду тока и принципу действия
Как известно, существует два рода электрического тока – переменный и постоянный.
Исходя из этого, электрические машины также подразделяют по роду тока на два вида – машины электрические переменного тока и машины электрические постоянного тока.
Электрические машины переменного тока
- Трансформаторы – наиболее широко применимы в сетях электроснабжения для преобразования напряжений (повышение и понижение).
 Также довольно широко их применяют в выпрямительных установках для согласования напряжений, в устройствах связи, вычислительной техники и автоматики. Часто применяются и для проведения измерений электрических (измерительные трансформаторы), а также для различных функциональных преобразований (трансформаторы вращающиеся).
Также довольно широко их применяют в выпрямительных установках для согласования напряжений, в устройствах связи, вычислительной техники и автоматики. Часто применяются и для проведения измерений электрических (измерительные трансформаторы), а также для различных функциональных преобразований (трансформаторы вращающиеся).
- Асинхронные электродвигатели – самые распространенные в мире благодаря своей относительной простоте и низкой стоимости. Применяются в промышленных электроустановках (станки, краны, подъемные машины) и в бытовых (компрессора холодильников, вентиляторы, пылесосы). Довольно широкое применение получили однофазные и двухфазные асинхронные управляемые электродвигатели, а также сельсины и тахогенераторы асинхронные.
- Синхронные электродвигатели – наиболее часто применяемы в качестве генераторов электрического тока на электрических станциях. Также применимы в качестве генераторов повышенной частоты в различных источниках питания (например, на кораблях, тепловозах, самолетах).
 Также в электроприводах большой мощности применяют синхронные электродвигатели, которые могут также помимо выполнения полезной работы и также влиять на коэффициент мощности сети cos φ.
Также в электроприводах большой мощности применяют синхронные электродвигатели, которые могут также помимо выполнения полезной работы и также влиять на коэффициент мощности сети cos φ. - Коллекторные машины – используют их только в качестве электродвигателей. Это вызвано сложностью их конструкции и необходимостью тщательного ухода. В бытовых электроприборах и устройствах автоматики применяются универсальные коллекторные электродвигатели, способные работать на двух родах тока – постоянном и переменном.
Электрические машины постоянного тока
Они работают практически во всех сферах промышленности и транспорта.
В связи с большим распространением машин постоянного тока также были распространены и генераторы постоянного тока. Они использовались в качестве источников постоянного напряжения для зарядки аккумуляторных батарей, на транспорте (тепловозы, теплоходы и другие), а также в промышленности (система генератор — двигатель). Ввиду развития полупроводниковой техники генераторы постоянного тока постепенно вытесняются из работы и активно заменяются на генераторы переменного тока работающих в паре с полупроводниковым преобразователем.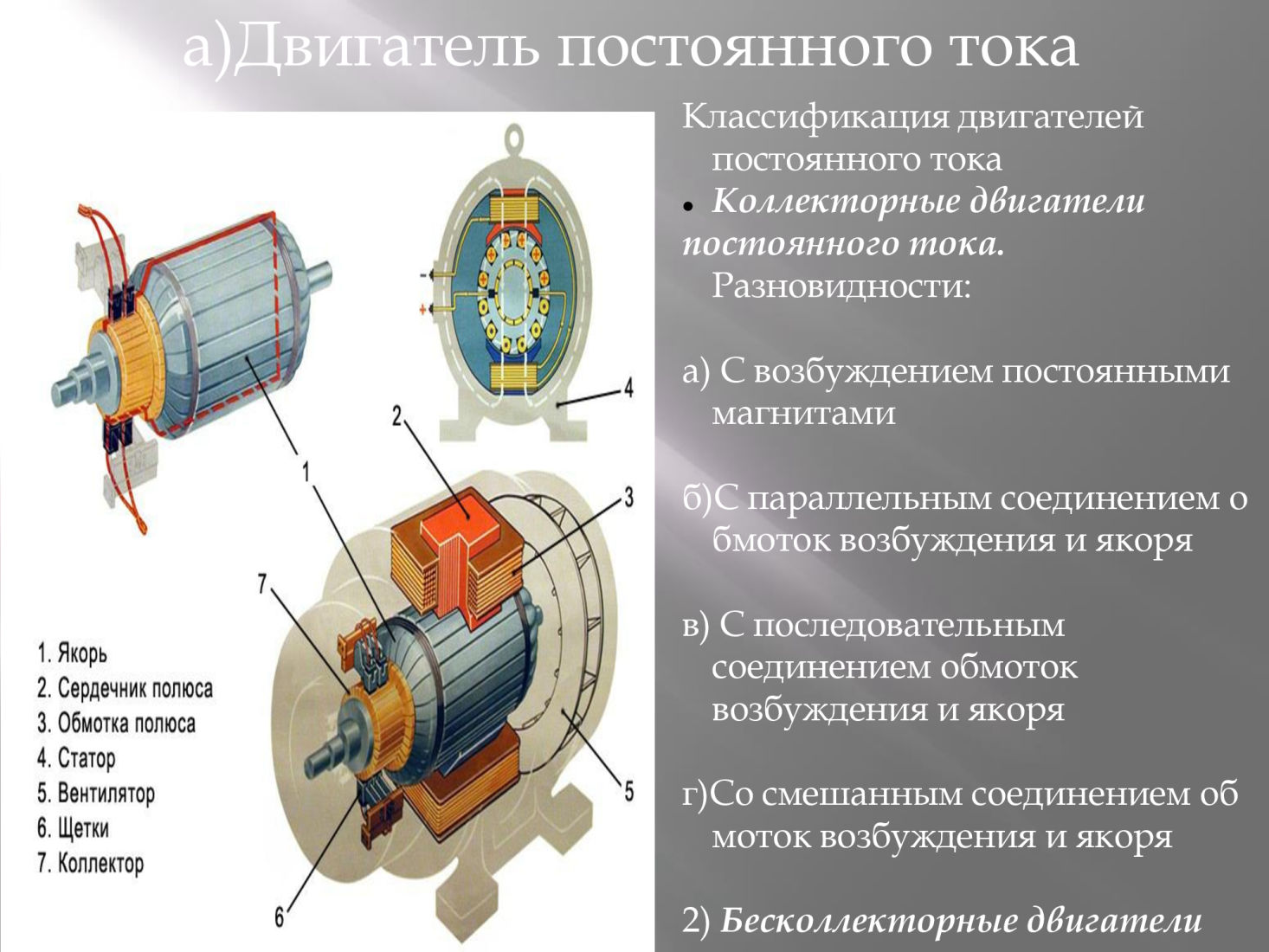
Также применяются электродвигатели постоянного тока и в системах автоматического управления АСУ в качестве усилителей электромашинных, тахогенераторов и исполнительных электродвигателей.
Электрические микромашины
Микромашины активно применяются в устройствах автоматических.Их подразделяют на группы:
- Силовые микродвигатели – приводят во вращения механизмы различных автоматических устройств. Например, самопишущие устройства и другие.
- Исполнительные (управляемые) микромашины – выполняют преобразование энергии электрической в механическую, то есть ведут обработку определенных команд из вне.
- Тахогенераторы – преобразуют механическую энергию вращения вала в электрический сигнал напряжения, который пропорционален скорости вращения вала.
- Вращающиеся трансформаторы – на выходе этих трансформаторов устанавливается напряжение, пропорциональное функции углу поворота ротора, например синусу или косинусу данного угла или же самому углу.

- Машины синхронной связи – (магнесины или сельсины) осуществляют синфазный и синхронный поворот или же вращения нескольких осей, не имеющих между собой механической связи.
- Микромашины гироскопических приборов – вращают роторы гироскопов с довольно высокой частотой, а также производят коррекцию их положения.
- Электромашинные усилители и преобразователи.
Классификация по мощности
- Микромашины – их мощность может варьироваться от нескольких долей ватта до 500 Вт. Они могут производится для двух родов тока — постоянного и переменного. Могут быть рассчитаны как на работу при нормальной (промышленной) частоте 50 Гц, так и при повышенной ( от 400 до 2000 Гц).
- Электродвигатели малой мощности – от 0,5 до 10 кВт. Также могут изготавливаться для двух родов тока – постоянного и переменного нормальной и повышенной частоты.
- Электродвигатели средней мощности – от 10 кВт до нескольких сотен ватт.
- Электродвигатели большой мощности – мощность данных машин больше нескольких сотен киловатт.
 Такие электродвигатели предназначены для работы на постоянном и переменном напряжении нормальной частоты. Исключение могут составлять электродвигатели специального назначения (авиация, флот) и другие.
Такие электродвигатели предназначены для работы на постоянном и переменном напряжении нормальной частоты. Исключение могут составлять электродвигатели специального назначения (авиация, флот) и другие.
Классификация по частоте вращения
- До 300 об/мин — тихоходные.
- От 300 до 1500 об/мин — средней быстроходности.
- От 1500 до 6000 об/мин — быстроходные.
- Более 6000 об/мин — сверхбыстроходные.
Микромашины же могут изготавливать с частотой вращения вала от нескольких оборотов в минуту до 60 000 оборотов в минуту. Скорость вращения машин средней и большой мощности, как правило, не превышает 3000 об/мин.
Устройство и принцип работы электромобиля. Плюсы и минусы электрокаров
Устройство электромобиля и принцип его работы
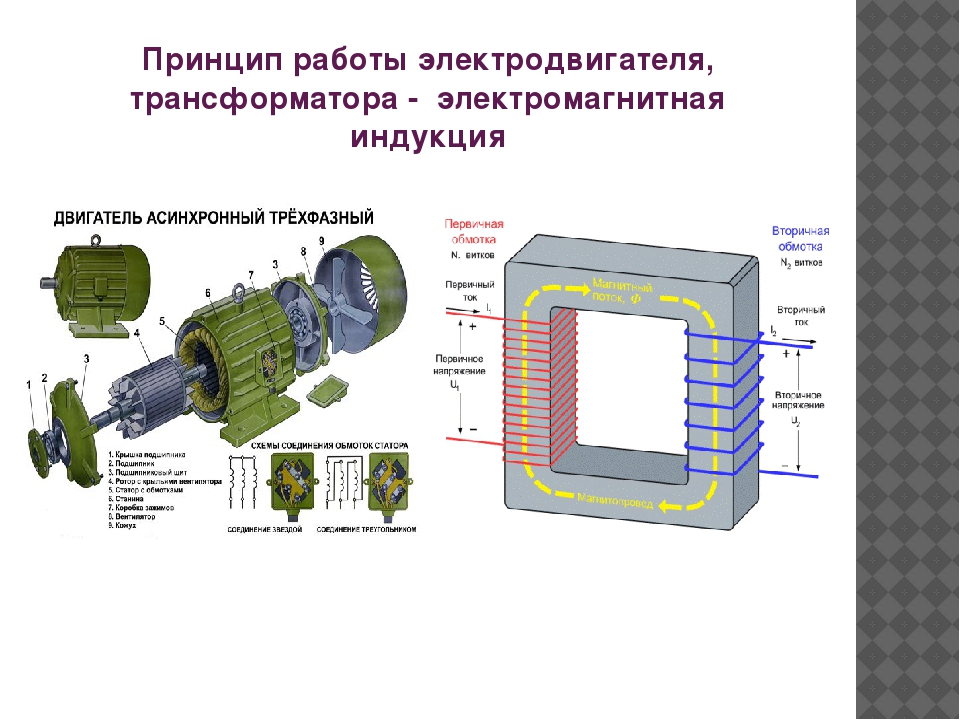
Принцип работы электромобиля заключается в следующем. В нем задействован механизм электромагнитной индукции, который состоит в том, что при наличии переменного электрического тока в проводнике возникает магнитное поле, которое по закону Ампера выполняет отклоняющее действие.
В моторе существуют два основных компонента: ротор и статор.
Статор остается постоянно неподвижным и по нему пропускается электрический ток определенной частоты.
Генерируемое в статоре магнитное поле действует на ротор и тот начинает вращаться. Получаемая механическая энергия используется для движения транспортного средства. Скорость движка прямо пропорциональна частоте тока и количеству установленных магнитных полюсов.
Ток для питания статора генерируется установленными на борту батареями. В зависимости от модели машины, батареи могут иметь разную емкость, конструкцию, особенности используемых механизмов работы.
Типы устройств электромобиля
Выделяют такие машины на электричестве:
- Внутригородские. Имеют невысокую мощность и скорость передвижения, на них установлены специальные ограничения по максимальной мощности. Небольшого диаметра колеса и малый вес позволяют двигаться в нормальном городском режиме;
- Микроэлектромобили.
 Созданы с учетом плотного городского транспортного потока, имеют батарею небольшой емкости. Используются для небольших переездов, поездок в магазин, на работу и назад и т.п.;
Созданы с учетом плотного городского транспортного потока, имеют батарею небольшой емкости. Используются для небольших переездов, поездок в магазин, на работу и назад и т.п.; - Различные креативные варианты, типа трициклы;
- Обычные авто. Привычные легковушки, типа некоторых популярных моделей от Tesla;
- Грузовые. Пока еще не слишком распространены, но в перспективе могут использоваться в крупных городах для внутренних перевозок и уменьшения выбросов в атмосферу;
- Троллейбусы, трамваи, автобусы на электродвижках также являются довольно популярным видом транспорта в любом крупном городе.
Плюсы и минусы электрокаров
Плюсы:
- Минимальные расходы на заправку.
- Простота сервисного обслуживания.
- Тихая работа мотора.
- Отсутствие опасных выхлопных газов.
- Покупка на перспективу.
Минусы:
- Небольшой выбор авто и высокая цена.

- Ограниченное количество необходимых заправок.
- Высокая цена на батареи.
- Ограниченность использования электроники, например, кондиционера, который будет быстро поглощать имеющийся заряд АКБ.
Источники:
Понравилась статья? Расскажите друзьям: Оцените статью, для нас это очень важно:Проголосовавших: 1 чел.
Средний рейтинг: 5 из 5.
Синхронные электродвигатели. Работа и применение. Особенности
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.

Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя.
 По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе. - Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Похожие темы:
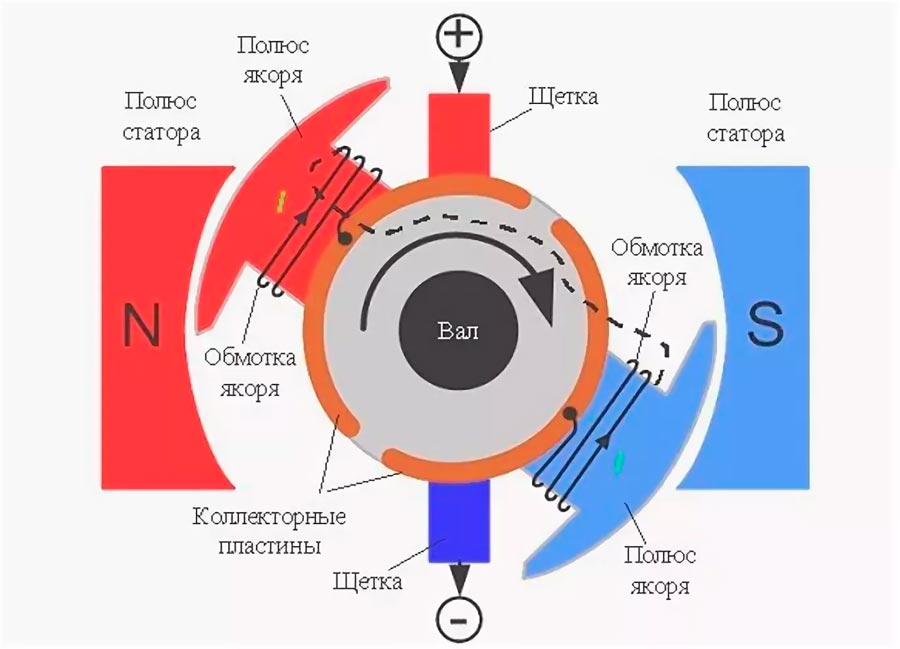
Принцип Действия Двигателя Постоянного Тока: Что Нужно Знать
Мощный двигатель постоянного тока
Тема нашей сегодняшней статьи — принцип действия электродвигателя постоянного тока. Если вы бываете на нашем сайте, то наверняка уже знаете, что эту тему мы решили раскрыть более полно и понемногу разбираем все разновидности электромотором и электрогенераторов.
Постоянный ток известен человечеству вот уже где-то 200 лет, эффективно применять его научились немного позже, а вот сегодня трудно себе представить деятельность человека, где бы энергия не применялась. Приблизительно таким же образом происходила и эволюция электрических двигателей.
Немного истории и теории
Первые электрические двигатели
Бурное развитие электротехники не прекращается с момента зарождения этого направления в физике. Первыми разработками, связанными с электрическими моторами, были работы многих ученых в 20-х годах 19-го столетия. Изобретали всяких мастей пытались соорудить механические машины, способные превращать электрическую энергию в кинетическую.
- Особую значимость имеют исследования М. Фарадея, который в 1821 году, проводя эксперименты по взаимодействию тока и разных проводников, выяснил, что проводник может вращаться внутри магнитного поля, ровно как вокруг проводника может вращаться и магнит.
- Второй этап развития занял более значительный отрезок времени от 1830-х до 1860-х годов. Теперь, кода основные принципы преобразования энергии человеку были известны, он пытался создать наиболее эффективную конструкцию двигателя с вращающимся якорем.
- В 1833 году американский изобретатель и по совместительству кузнец Томас Девенпорт смог построить первый роторный двигатель, работающий на постоянном токе, и сконструировать модель поезда, приводимую им в движение.
 На свою электрическую машину он получил патент спустя 4 года.
На свою электрическую машину он получил патент спустя 4 года.
Б.С. Якоби
- В 1834 году Борис Семенович Якоби, русско-немецкий физик и изобретатель, создает первый в мире электродвигатель постоянного тока, в котором смог таки реализовать основной принцип работы таких машин, применяемый и сегодня – с постоянно вращающейся частью.
- В 1838 году, 13 сентября был произведен пуск настоящей лодки по Неве с 12-ю пассажирами на борту – так происходили полевые испытания двигателя Якоби. Лодка двигалась со скоростью 3 км\ч против течения. Привод двигателя был соединен с лопастными колесами по бокам, как на пароходах того времени. Электрический ток подавался к агрегату от батареи содержащей 320 гальванических элементов.
Лодка с лопастными колесами
Результатом проведенных испытаний стала возможность формирования основных принципов дальнейшего развития электромоторов:
- Во-первых, стало ясно, что расширение сферы их применения напрямую зависит от удешевления способов получения электрической энергии – требовался надежный и недорогой генератор, а не дорогостоящие на тот момент гальванические батареи.

- Во-вторых, требовалось создать достаточно компактные двигатели, которые бы, однако, обладали большим коэффициентом полезного действия.
- И в третьих – были очевидны преимущества двигателей с вращающимися неоднополюсными якорями, с постоянным вращающимся моментом.
Работа шунтового генератора
Затем наступает третий этап развития электромоторов, который ознаменован открытием явления самовозбуждения двигателя электрического тока, после чего был сформирован принцип обратимости таких машин, то есть двигатель может быть генератором, и наоборот. Теперь для того чтобы запитать двигатель начали применять недорогие генераторы тока, что в принципе делается и сегодня.
Интересно знать! Любая электрическая сеть подключена к электростанции, вырабатывающей ток. Сама станция, по сути, и есть набор мощнейших генераторов, приводимых в движение разными способами: течение реки, энергия ветра, ядерные реакции и прочее. Исключение составляют, разве что, фотоэлементы в солнечных батареях, но это уже другая, дорогая, пока не нашедшая достаточного распространения история.

Вид современной конструкции электродвигатель приобрел в далеком 1886 году, после чего в него вносились только доработки и усовершенствования.
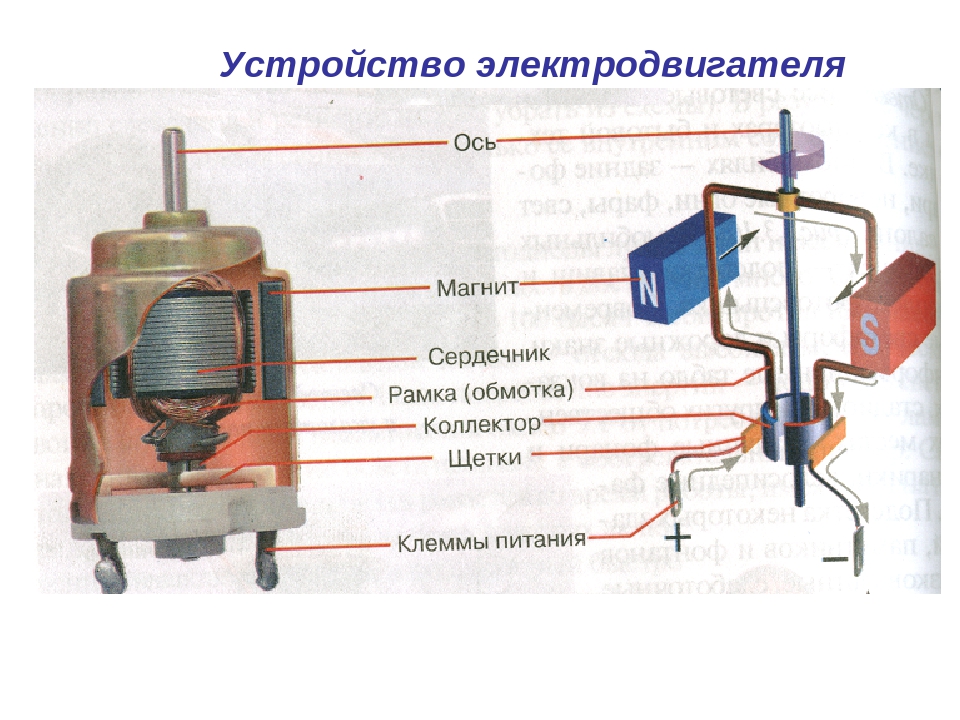
Основные принципы функционирования
Двигатели постоянного тока и принцип действия: вспоминаем школьные уроки физики
В основу любого электрического двигателя положен принцип магнитного притягивания и отталкивания. В качестве эксперимента можете провести такой простейший опыт.
- Внутрь магнитного поля нужно поместить проводник, по которому нужно пропустить электрический ток.
- Для этого удобнее всего пользоваться магнитом в форме подковы, а в качестве проводника подойдет медная проволока подключенная концами к батарейке.
- В результате опыта вы увидите, что проволоку вытолкнет из области действия постоянного магнита. Почему это происходит?
- Дело в том, что при прохождении тока через проводник, вокруг последнего создается электромагнитное поле, которое вступает во взаимодействие с уже имеющимся, от постоянного магнита.
 Как результат этого взаимодействия, мы видим механическое движение проводника.
Как результат этого взаимодействия, мы видим механическое движение проводника. - Если говорить более подробно, то выглядит это так. Когда круговое поле проводника вступает во взаимодействие с постоянным от магнита, то сила магнитного поля с одной стороны возрастает, а с другой уменьшается, из-за чего провод выталкивает из области действия магнита под углом 90 градусов.
Занимательная физика
- Направление, в котором вытолкнет проводник можно установить по правилу левой руки, которое применимо только к электродвигателям. Правило гласит следующее – левую руку нужно поместить в магнитное поле так, чтобы его силовые линии входили в нее с ладони, а 4 пальца были направлены по ходу движения положительных зарядов, тогда отведенный в сторону большой палец покажет направление воздействующей на проводник движущей силы.
Эти простые принципы двигателя постоянного тока применяется и поныне. Однако в современных агрегатах вместо постоянных магнитов применяют электрические, а рамки заменяют сложные системы обмоток.
Строение двигателя
Двигатель постоянного тока и устройство
Давайте теперь более подробно разберем, как устроен двигатель постоянного тока, какие в нем имеются детали и как они взаимодействуют друг с другом.
Продолжение теории
Принцип и устройство двигателя постоянного тока
Сконструировать простейший двигатель постоянного тока вы легко сможете своими руками. Инструкция такова, что достаточно соорудить прямоугольную рамку из проводника, способную вращаться вокруг центральной оси.
- Рамка помещается в магнитное поле, после чего на ее концы подается постоянное напряжение, от той же батарейки.
- Так только по рамке начинает течь ток, она приходит в движение, пока не займет горизонтальное положение, называемое нейтральным или «мертвым», когда воздействие поля на проводник равно нулю.
- По идее, рамка должна остановиться, но этого не произойдет, так как она пройдет «мертвую» точку по инерции, а значит, электродвижущие силы снова начнут возрастать.
 Но из-за того, что ток теперь течет в обратном направлении относительно магнитного поля, будет наблюдать сильный эффект торможения, что несопоставимо с нормальной работой двигателя.
Но из-за того, что ток теперь течет в обратном направлении относительно магнитного поля, будет наблюдать сильный эффект торможения, что несопоставимо с нормальной работой двигателя. - Чтобы процесс протекал нормально нужно предусмотреть такую конструкцию подключения рамки к питанию, при которой в момент прохождения тока через нулевую точку будет происходить переключение полюсов, а значит, относительно магнитного поля ток потечет в прежнем направлении.
В качестве такого устройства применяется коллектор, состоящий их изолированных пластин, но давайте поговорим о нем чуть позже.
В виде альтернативы можно изготовить такую рамку, что показана на фото выше. Ее отличие в том, что по двум контурам рамки ток протекает в одном направлении, что позволяет избавиться от коллектора, однако такой электромотор крайне неэффективен, из-за постоянно воздействующих тормозящих сил.
Получив вращение ротора, к нему можно приладить привод и дать сопоставимую мощности двигателя нагрузку, получая тем самым работающую модель.
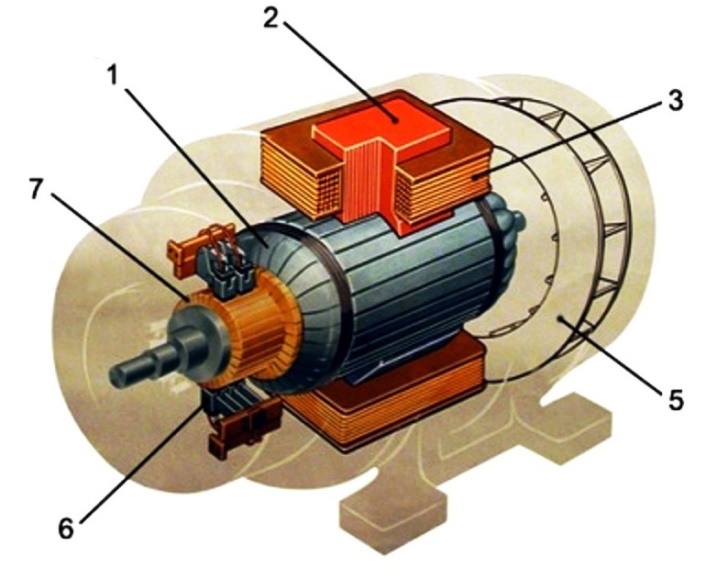
Строение электромотора постоянного тока
Каково устройство электродвигателя постоянного тока
Итак, переходим к строению двигателей:
- Статор или индуктор – неподвижная часть двигателя, представляющая собой деталь, создающую постоянное электромагнитное поле. Состоит статор из сердечника, выполненного из тонколистовой стали (из пластин определенного профиля набирается деталь нужного размера) и обмотки.
Принцип действия и устройство двигателя постоянного тока: статор
- Обмотка укладывается в пазы сердечника определенным образом, формируя основные и добавочные магнитные полюса, естественно, при включении в сеть.
- Обмотка возбуждения находится на главных полюсах, тогда как на добавочных она служит для улучшения коммутации – увеличивает эффективность мотора, его КПД.
Якорь двигателя постоянного тока
- Ротор двигателя, являющийся тут якорем, тоже имеет похожее строение, но отличает его, прежде всего то, то данный узел двигателя является подвижным.
 Именно он заменяет вращающуюся рамку из примеров, рассмотренных выше.
Именно он заменяет вращающуюся рамку из примеров, рассмотренных выше. - Витки обмотки якоря изолированы друг от друга и соединяются с контактными пластинами коллектора, через которые и подается питание.
- Все части ротора закреплены на металлическом валу, который является центральной осью вращения двигателя. К нему же и подключается привод, передающий крутящий момент на внешние механизмы.
Вид коллектора
- Коллектор (полосатый цилиндр, насаженный на вал) соединен с питающей сетью через щетки, которые выполняются чаще всего из графита. Вообще строение коллектора таково, что контактные пластины также изолированы, что позволяет эффективно менять направление тока в цепи, чтобы избегать торможения двигателя.
- Сами щетки имеют скользящий контакт с пластинами коллектора, и удерживаются в одном положении при помощи щеткодержателей. Поддерживать постоянное напряжение контакта (а ведь мы знаем, что щетки истираются и истончаются) помогают пружины.

Графитовые щетки
- Щетки соединены медными проводами с питающей сетью. Дальше начинается внешняя схема электропитания и управления, о которой мы поговорим немного позже.
Валовый подшипник качения
- Следом за коллектором на валу располагается подшипник качения, обеспечивающий плавное вращение. Сверху он защищен специальным полимерным кольцом, защищающим его от пыли.
Совет! Одной из частых поломок электрических двигателей, является выход из строя подшипника. Если вовремя не заменить этот небольшой элемент конструкции, то запросто можно спалить весь двигатель.
- С обратной стороны обмотки, на том же валу, располагается крыльчатка, поток воздуха от которой эффективно охлаждает двигатель.
- Следом за крыльчаткой обычно крепится привод, отличающийся параметрами, в зависимости от назначения агрегата, в котором двигатель постоянного тока установлен.
В принципе, на этом все. Как видите, конструкция достаточно проста, и что немаловажно, очень эффективна.
Как видите, конструкция достаточно проста, и что немаловажно, очень эффективна.
Особенности коллекторных двигателей
Перфоратор в разрезе: такие двигатели универсальны и могут работать как от постоянного, так и от переменного тока, но только при соответствующем подключении
Вообще коллекторный двигатель – это действительно хорошее устройство. Такие агрегаты легчайшим образом поддаются регулировке. Повысить, опустить обороты – не проблема. Дать четкий крутящий момент или жесткую механическую характеристику – запросто.
Однако, несмотря на ряд неоспоримых преимуществ, двигатель имеет повышенную сложность сборки, относительно двигателей переменного тока с самовозбуждающимся ротором или других бесколлекторных агрегатов, а также меньшую надежность. И вся загвоздка состоит в этом самом коллекторе.
- Этот узел достаточно дорог, а цена его ремонта иной раз сопоставима с новой деталью, если вообще возможность восстановления имеется.
- Он забивается при работе токопроводящей пылью, что со временем может стать причиной выхода из строя всего двигателя.

- Коллектор искрит, создавая при этом помехи, а при высокой нагрузке так и вовсе может полыхнуть, создавая круговой огонь. В таком случае его закоротит дугой, что несовместимо с жизнью двигателя.
Выше мы уже сказали, что его задача менять направление тока в витках обмотки, а теперь хотим разобрать вопрос подробнее.
Все гениальное просто
- Итак, по сути, данная часть ротора служит выпрямителем тока, то есть переменный ток становится, проходя через него, постоянным, что справедливо для генераторов, или меняет направление тока, если речь идет о двигателях.
- В случае рассмотренного выше примера с вращающейся в магнитном поле рамкой, требовался коллектор, состоящий из двух изолированных полуколец.
- Концы рамки подключаются к разным полукольцам, что не позволяет цепи накоротко замкнуться.
- Как мы помним, коллектор контактирует с щетками, которые установлены таким образом, чтобы они одновременно не контактировали друг с другом и меняли полукольца при прохождении рамкой нулевой точки.

Работа коллектора
Все предельно просто, однако такие двигатели и генераторы не могут быть нормальной мощности в силу конструктива. В результате якорь стали делать с множеством витков, чтобы активные проводники всегда находились максимально близко к полюсам магнита, ведь, вспоминая закон электромагнитной индукции, становится ясно, что именно это положение самое эффективное.
Раз увеличивается количество витков, значит, требуется разбить коллектор на большее число частей, что собственно и является причиной сложности изготовления и дороговизны этого элемента.
Альтернатива коллекторному двигателю
Бесщеточный двигатель постоянного тока
В электронике уже давно царит век полупроводников, что позволяет изготавливать надежные и компактные микросхемы. Так зачем же мы до сих пор пользуемся коллекторными двигателями? А действительно?
- Инженеры тоже не оставили вопрос незамеченным. В результате коллектор сменили силовые ключи, дополнительно в конструкции появились датчики, регистрирующие текущее положение ротора, чтобы система автоматически определяла момент переключения обмотки.

- Как мы помним, нет никакой разницы, двигается ли магнит относительно проводника, либо же это происходит наоборот. Поэтому якорем становится статор, а на роторе располагается постоянный магнит или простейшая обмотка, соединенная с питанием через контактные кольца, который вращать внутри конструкции намного проще.
Контактные кольца в простейшем генераторе переменного тока
- Строение контактных колец чем-то напоминает коллектор, однако они намного надежнее и изготавливать их в условиях производства проще.
В итоге получился новый тип двигателя, а именно бесщеточный двигатель постоянного тока aka BLDC. Устройству доступны те же преимущества, что и коллекторному двигателю, но от надоедливого коллектора мы избавляется.
Однако такие двигатели применяются только в дорогих аппаратах, тогда как простая техника, например соковыжималка или тот же перфоратор будут рентабельнее в производстве, если ставить на них уже классические коллекторные модели двигателей.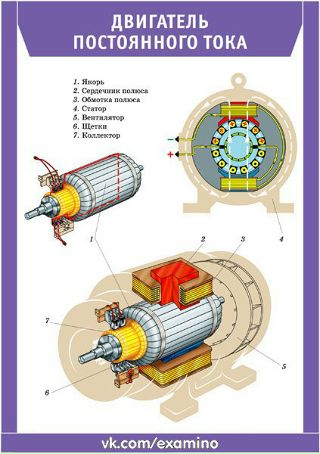
Управление двигателем постоянного тока
Принципиальная электрическая схема управления электродвигателями постоянного тока с реверсом
Итак, как вы уже поняли, основной принцип работы двигателя постоянного тока заключается в инвертировании направления тока в якорной цепи, иначе бы возникало торможение, приводящее к стопорению мотора. Таким образом, реализуется вращение мотора в одну сторону, но такой режим не единственный, и двигатель можно заставить вращаться в обратном направлении.
Для этого достаточно поменять направление тока в возбуждающей обмотке, или сменить местами щетки, через которые подается питание на обмотку ротора.
Совет! Если сделать одновременно обе эти манипуляции, то с двигателем ничего не произойдет, и он продолжит вращаться в том же направлении, что и ранее.
Однако это не все моменты, которые требуется регулировать в таком двигателе. Когда вам требуется четко управлять оборотами такого агрегата, или организовать специальный режим управления оборотами, помимо тумблеров и переключателей в схему управления включаются более сложные элементы.
Система управления может быть по-настоящему сложной
- При этом следует учитывать следующие недостатки коллекторных двигателей: низкий момент на малых оборотах вращения двигателя, из-за чего приборам требуется редуктор, что удорожает и усложняет конструкцию; генерация сильных помех; ну и низкая надежность коллектора, про что мы писали выше.
- Также в расчет берется то, что потребление тока и скорость вращения вала зависят и от механической нагрузки на валу.
- Итак, основной параметр, определяющий скорость вращения вала – это подаваемое напряжение на обмотку, поэтому, следуя логике, для управления этим параметром применяются устройства, регулирующие выходное напряжение.
Схемы управления двигателем на базе интегральной микросхемы LM317
- Такими устройствами являются регулируемые стабилизаторы напряжения. На сегодняшний день целесообразнее использовать дешевые компенсационные интегральные стабилизаторы, типа LM Схема управления с таким устройством показана на схеме выше.

Компактный стабилизатор
- Схема довольно примитивная, но, кажется, достаточно простой, а главное эффективной и недорогой. Мы видим, что ограничение выходного напряжения регулируется дополнительным резистором, обозначенным как Rlim, расчет сопротивления которого имеется в спецификации. При этом стоит понимать, что он ухудшает характеристику всей схемы, как стабилизатора.
- Мы видим, что представлено два варианты схемы, какая из них будет показывать себя лучше? Вариант «а» выдает линейную характеристику удобного регулирования, благодаря чему очень популярен.
- Вариант «б», наоборот», характеристику имеет нелинейную. Фактическая разница будет заметна при выходе из строя переменного резистора: в первом случае мы получим максимальную скорость вращения, а во втором – наоборот, минимальную.
Не будем больше углубляться в дебри, так как статья у нас по большей части ознакомительная.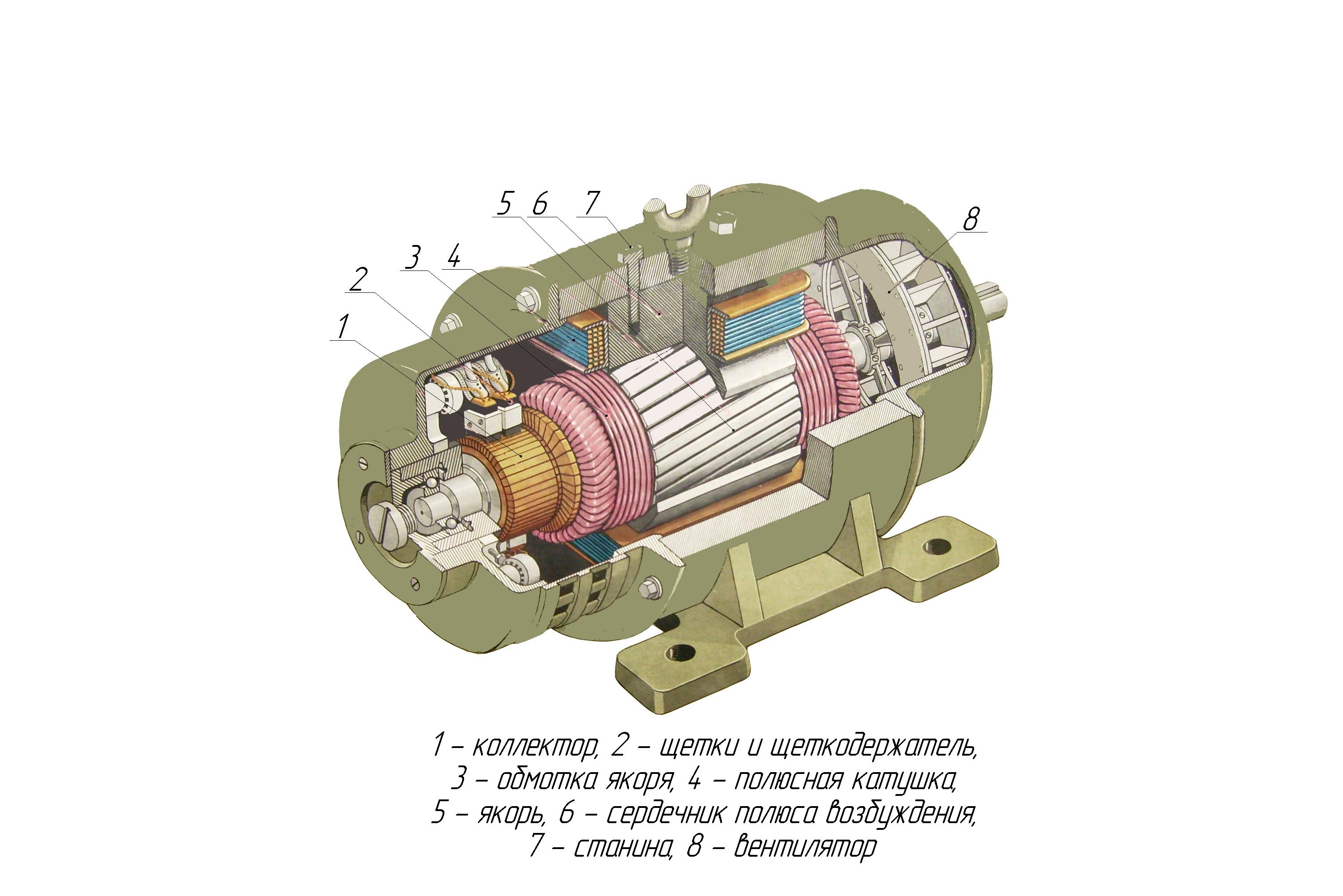 Мы разобрали принципы действия двигателей постоянного тока, а это уже что-то. Если вопрос вас заинтересовал, то обязательно просмотрите следующее видео. А на этом мы прощаемся с вами! Всего хорошего!
Мы разобрали принципы действия двигателей постоянного тока, а это уже что-то. Если вопрос вас заинтересовал, то обязательно просмотрите следующее видео. А на этом мы прощаемся с вами! Всего хорошего!
Асинхронный электродвигатель: устройство и принцип работы
Самым эффективным устройством, превращающим электрическую энергию в механическую, является асинхронный двигатель, изобретенный инженером Доливо-Добровольским в конце 19 века. Учитывая возрастающий интерес современников к разработке и сборке станков, самодвижущихся аппаратов и прочих механизмов, мы постараемся объяснить, как работает асинхронный электродвигатель, чтобы вы могли понять принцип его действия и результативно его использовать.
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов — обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства.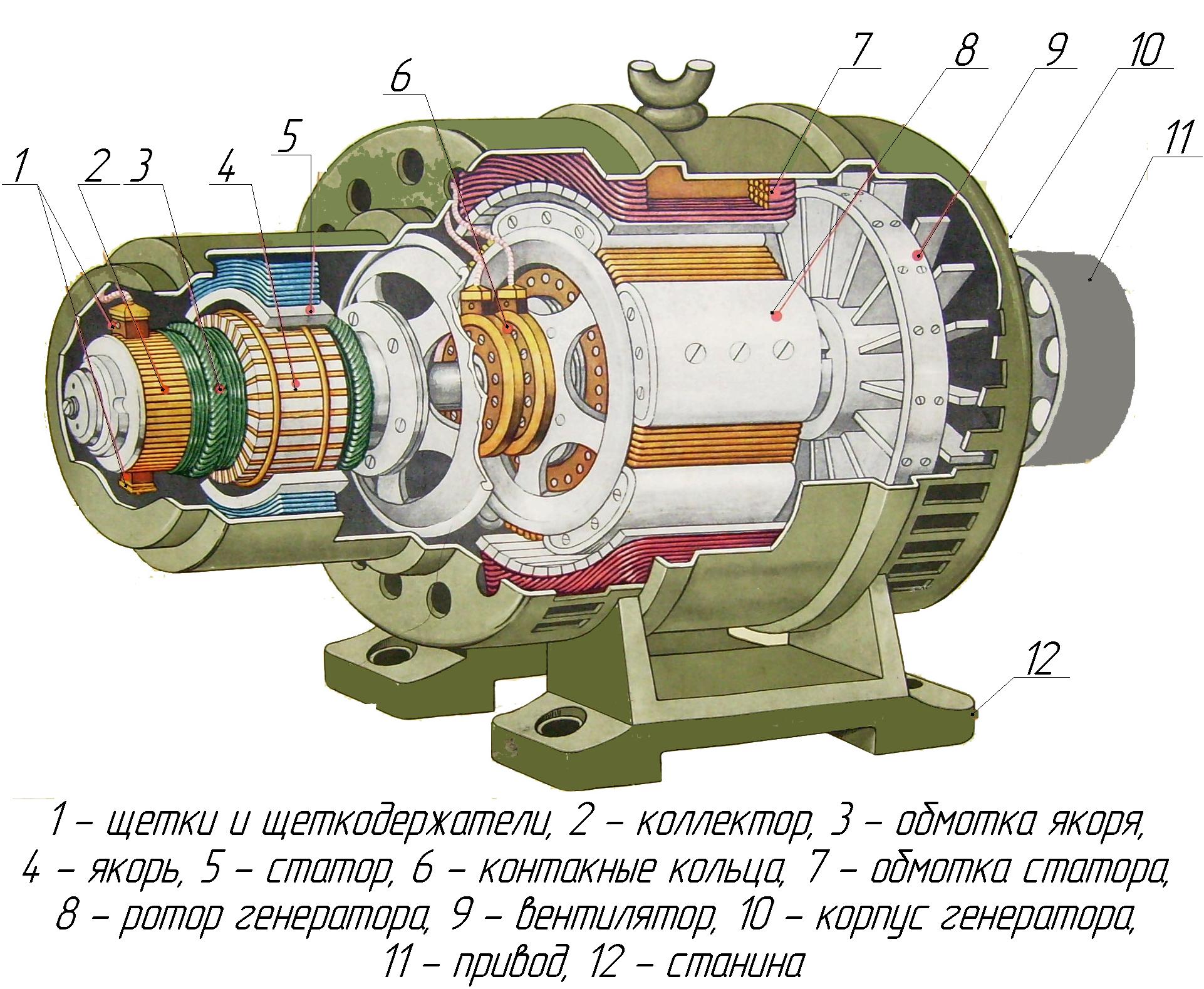 С ним наша жизнь стала более комфортной.
С ним наша жизнь стала более комфортной.
Коллекторный двигатель: устройство, управление, регулирование
Мы часто встречаемся с электродвигателями. Они обеспечивают работу бытовой и строительной техники, являются составной частью производственного оборудования. Немалая часть устройств имеет в составе коллекторный двигатель. Это один из простых и недорогих движков, который имеет хорошие характеристики. Именно этим, да ещё невысокой ценой, обусловлена его популярность.
Содержание статьи
Что такое коллекторный двигатель и его особенности
Коллектором называют часть двигателя, контактирующую со щётками. Этот узел обеспечивает передачу электроэнергии в рабочую часть агрегата. Коллекторным называется двигатель, у которого хотя бы одна обмотка ротора соединена со щётками и коллектором. Коллекторные электродвигатели бывают:
- постоянного тока;
- переменного тока;
- универсальные.
Коллекторный двигатель может быть постоянного и переменного тока. Есть универсальные модели, которые могут работать от источника напряжения любого типа
Есть универсальные модели, которые могут работать от источника напряжения любого типа
Последние универсальные, работают как от постоянного, так и от переменного тока. Они сохраняют популярность, даже несмотря на то, что наличие щёток отрицательный момент, так как щётки стираются и искрят. За этим узлом требуется постоянное наблюдение, техническое обслуживание. К плюсам коллекторных двигателей относят возможность плавной регулировки скорости в широких пределах, невысокую стоимость.
Как и другие электромоторы, коллекторный состоит из статора и ротора (часто называют «якорь»). Его отличительной чертой является наличие на валу коллекторного узла, через который на машину передаётся электропитание. Устройство коллекторных моторов постоянного и переменного тока похожи, но имеют определённые отличия, потому рассмотрим подробнее их по отдельности.
Общее устройство коллекторных двигателей
Как и любой электродвигатель, коллекторный преобразует электрическую энергию в механическую. Он состоит из неподвижной части – статора и подвижной – ротора. В статоре располагаются обмотки возбуждения, ротор отвечает за передачу возникающей механической энергии. Одна из составляющих частей ротора – вал. С одной стороны, на валу размещён коллекторный узел, с помощью которого на обмотки ротора передаётся электрическая энергия.
Он состоит из неподвижной части – статора и подвижной – ротора. В статоре располагаются обмотки возбуждения, ротор отвечает за передачу возникающей механической энергии. Одна из составляющих частей ротора – вал. С одной стороны, на валу размещён коллекторный узел, с помощью которого на обмотки ротора передаётся электрическая энергия.
Коллекторный двигатель: устройство
Статор состоит из корпуса, который защищает компоненты мотора от повреждений. Сверху и снизу корпуса крепятся магнитные полюса. Они необходимы для поддержания магнитного потока между статором и ротором.
Ротор коллекторного двигателя
Ротор коллекторного двигателя состоит из вала, на который насаживается сборный магнитопровод. С одной стороны, на вал крепится коллекторный узел, с другой, лопасти вентилятора. Для обеспечения лёгкого вращения и для фиксации в корпусе на вал с двух сторон надеваются подшипники. Для нормальной работы электродвигателя, необходимо чтобы ротор был отлично сбалансирован. Потому к изготовлению этой части подходят особенно скрупулёзно.
Для нормальной работы электродвигателя, необходимо чтобы ротор был отлично сбалансирован. Потому к изготовлению этой части подходят особенно скрупулёзно.
Подвижная (вращающаяся) часть
Роторная обмотка
Сердечник ротора собирается из металлических пластин, отштампованных из магнитного металла. Толщина пластин 0,35-0,5 мм, каждая из них залита слоем диэлектрического лака, для избавления от паразитных токов. Пластины по внешнему краю имеют пазы, в которые затем укладываются витки медной проволоки. Эти пластины насаживаются на вал и закрепляются на нём, собирается пакет требуемого размера. Эта система является магнитопроводом.
Так выглядит ротор коллекторного двигателя
В пазы магнитопровода укладывается витки медного обмоточного провода. Выходы обмоток выводятся на коллекторный узел, где и происходит их переключение.
Как устроен коллекторный узел и как он работает
Коллекторный узел стоит рассмотреть подробнее. Иначе понять, как вращается ротор, сложно.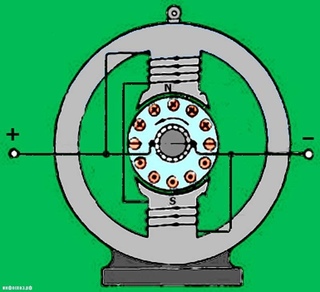 Коллектор имеет цилиндрическую форму и набран из медных пластин (иногда называют ламелями), которые изолированы друг от друга слюдяными или текстолитовыми прокладками. Нет электрического контакта и с осью вала, к которому он крепится.
Коллектор имеет цилиндрическую форму и набран из медных пластин (иногда называют ламелями), которые изолированы друг от друга слюдяными или текстолитовыми прокладками. Нет электрического контакта и с осью вала, к которому он крепится.
Коллектор имеет вид цилиндра, который набран из медных пластин. Пластины сделаны в виде секторов, разделены диэлектрическими прокладками
Получается, коллектор собран из медных секторов и без обмотки электрически друг с другом не связанных. К каждой пластине коллектора крепится вывод одной рамки обмотки ротора. К плоскости двух противоположных рамок коллектора прижимается две щетки. Они плотно прилегают к поверхности медной пластины коллектора, что даёт хороший контакт. На эти щётки подаётся потенциал, который и передаётся в тот виток обмотки ротора, который подключён к этим пластинам.
К парным пластинам коллектора прижимаются графитовые щетки
Так как ротор с некоторой скоростью вращается, одна пара пластин сменяется другой. Таким образом, напряжение передаётся на все обмотки ротора. При этом возникающие друг за другом поля поддерживают вращение ротора, «проталкивая» его в нужном направлении.
При этом возникающие друг за другом поля поддерживают вращение ротора, «проталкивая» его в нужном направлении.
Принцип работы
Вот теперь, после того как рассмотрели устройство ротора, можно поговорить о том, как работает коллекторный двигатель. Собственно, принцип действия не отличается от других моторов, ротор начинает вращаться в магнитном поле благодаря наведенным на нём токам. Но как именно и почему эти тока наводятся? Для понимания надо вспомнить, как возникает электродвижущая сила в постоянном магнитном поле. Если в поле постоянного магнита ввести прямоугольную рамку, под действием возникающего в ней тока она начинает вращение. Направление вращения определяется по правилу буравчика. Для постоянного поля оно гласит так, если ввести правую руку в поле так, чтобы магнитные линии входили в ладонь, вытянутые пальцы укажут направление движения.
Иллюстрация к пояснению принципа работы коллекторного двигателя постоянного тока
Если посмотреть на устройство ротора, то видим, что каждая обмотка представляет собой такую рамку. Только состоит она не из одного провода, а из нескольких, но сути это не меняет. При помощи коллекторного узла, в какой-то момент времени, обмотка подключается к питанию, по ней протекает ток и вокруг проводника возникает магнитное поле. Оно взаимодействует с полем статора. В зависимости от типа, стоят там постоянные магниты или тоже протекает постоянный ток в обмотках, генерируя на полюсах собственное магнитное поле. Поля ротора и статора рассчитаны так, что при взаимодействии они «проталкивают» ротор в нужном направлении. Вот, коротко и без особых подробностей описание работы коллекторного двигателя постоянного тока.
Только состоит она не из одного провода, а из нескольких, но сути это не меняет. При помощи коллекторного узла, в какой-то момент времени, обмотка подключается к питанию, по ней протекает ток и вокруг проводника возникает магнитное поле. Оно взаимодействует с полем статора. В зависимости от типа, стоят там постоянные магниты или тоже протекает постоянный ток в обмотках, генерируя на полюсах собственное магнитное поле. Поля ротора и статора рассчитаны так, что при взаимодействии они «проталкивают» ротор в нужном направлении. Вот, коротко и без особых подробностей описание работы коллекторного двигателя постоянного тока.
Обмотки на роторе подключаются к пластинам коллектора. Когда с пластинами контактируют щетки, получаем замкнутый контур, по которому течет ток
Если немного вдуматься, можно понять, почему коллекторный двигатель позволяет легко и плавно регулировать скорость. Чем больше напряжение подается на обмотки ротора, тем более мощное поле генерирует статор, тем сильнее их взаимодействие и быстрее крутится ротор, так как его толкают с большей силой. Если напряжение уменьшить, взаимодействие меньше, результирующая скорость вращения тоже. Так что все что нужно регулировать напряжение, а это может даже простой потенциометр (переменное сопротивление).
Если напряжение уменьшить, взаимодействие меньше, результирующая скорость вращения тоже. Так что все что нужно регулировать напряжение, а это может даже простой потенциометр (переменное сопротивление).
Достоинства и недостатки
Как водится, начнём с перечисления плюсов. Достоинства коллекторных электромоторов такие:
- Простое устройство.
- Высокая скорость до 10 000 об/мин.
- Хороший крутящий момент даже на малых оборотах.
- Невысокая стоимость.
- Возможность регулировать скорость в широких пределах.
- Невысокие пусковые токи и нагрузки.
Схема коллекторного двигателя
Неплохие качества, но есть и недостатки, причём они не менее серьёзные. Минусы коллекторных электродвигателей такие:
- Высокий уровень шумов при работе. Особенно на высоких скоростях. Щетки трутся о коллектор, дополнительно создавая шумы.
- Искрение щёток, их износ.
- Необходимость частого обслуживания коллекторного узла.

- Нестабильность показателей при изменении нагрузки.
- Высокая частота отказов из-за наличия коллектора и щёток, малый срок службы этого узла.
В целом, коллекторный двигатель неплохой выбор, иначе его не ставили бы на бытовой технике. Справедливости ради стоит сказать, что при нормальном качестве исполнения, работают такие двигатели годами. Могут и 10-15 лет проработать без проблем.
Коллекторный двигатель постоянного тока с магнитами
В коллекторных двигателях постоянного тока постоянное магнитное поле обеспечивают:
- постоянные магниты;
- обмотки возбуждения.
Магниты и обмотки располагаются на корпусе статора, и чаще всего, вверху и внизу. Если говорить о маломощных моторах, то более популярны коллекторные двигатели с постоянными магнитами. Они проще в производстве, дешевле, быстро реагируют на изменение напряжения, что позволяет плавно регулировать скорость. Недостаток моторов с постоянными магнитами является их невысокая мощность, а еще то, что со временем или при перегреве магниты теряют свои свойства и это приводит к ухудшению характеристик двигателя.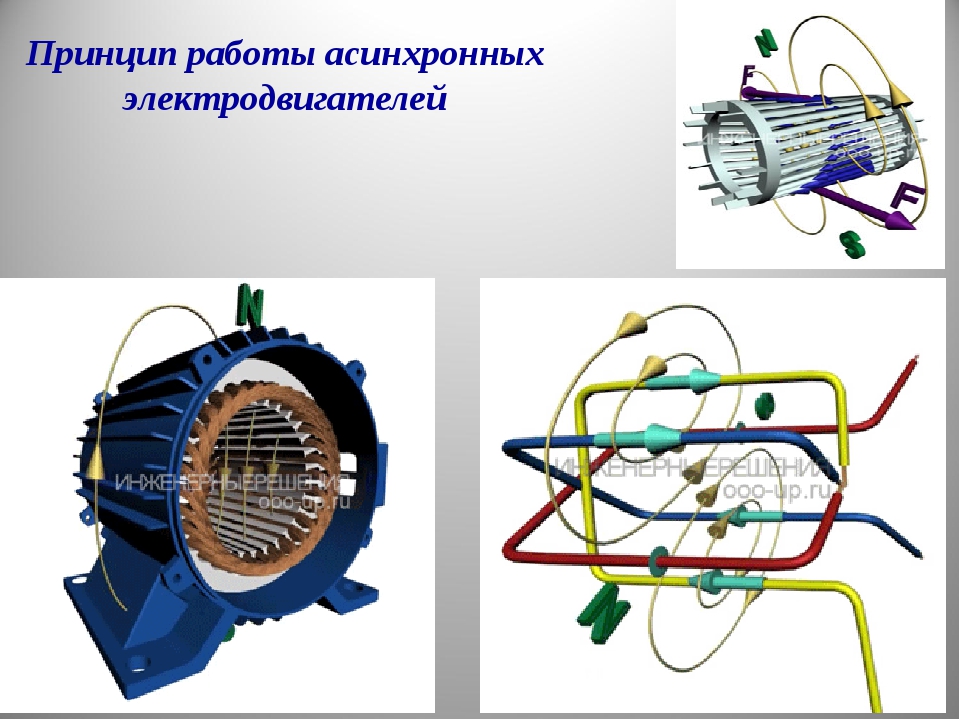
Устройство коллекторного двигателя постоянного тока
Такие моторы имеют небольшую мощность, от единиц до сотен Ватт. Они используются в технике, для которой важна плавная регулировка скоростей. Это обычно детские игрушки, некоторые виды бытовой техники (в основном вентиляторы). Недостатком коллекторного мотора с магнитами является постепенная потеря мощности, магниты со временем становятся слабее, и без того небольшая мощность падает. Но в последнее время появились новые магнитные сплавы с большой магнитной силой, позволяющие создавать двигатели с большой мощностью.
С обмотками возбуждения
Коллекторные двигатели постоянного тока с обмотками возбуждения нашли более широкое применение. От двигателей этого типа работает аккумуляторный электроинструмент: болгарки, дрели, шуруповерты т.д. Обмотки возбуждения делают из изолированного медного провода (в лаковой оболочке). В качестве основы используются канавки в полюсных наконечниках. На них как на основу наматываются обмотки.
Коллекторный двигатель с системой обмоточного возбуждения
Если посмотреть на устройство коллекторного двигателя, мы видим два несвязанных между собой устройства, ротор и обмотки возбуждения. От способа их подключения зависят характеристики и свойства двигателя. Различают четыре способа соединения ротора и обмоток возбуждения. Эти способы называют способами возбуждения. Вот они:
- Независимое. Возможно только если напряжения на обмотке возбуждения и на якоре неравны (бывает очень редко). Если они равны, используется схема параллельного возбуждения.
- Параллельное. Хорошо регулируется скорость, стабильная работа на низких оборотах, постоянные характеристики, независимы от времени. К недостаткам подключения этого типа относится нестабильность двигателя при падении тока индуктора ниже нуля.
- Последовательное. При таком подключении нельзя включать двигатель с нагрузкой на валу ниже 25% от номинальной. При отсутствии нагрузки скорость вращения сильно возрастает, что может разрушить двигатель.
 Потому с ременной передачей такой тип подключения не используют, при обрыве ремня мотор разрушается. Схема последовательного возбуждения имеет высокий момент на низких оборотах, но не слишком хорошо работает на высоких, управлять скоростью сложно.
Потому с ременной передачей такой тип подключения не используют, при обрыве ремня мотор разрушается. Схема последовательного возбуждения имеет высокий момент на низких оборотах, но не слишком хорошо работает на высоких, управлять скоростью сложно. - Смешанное. Считается одним из лучших. Хорошо управляется, имеет высокий крутящий момент на низких оборотах, редко выходит из-под контроля. Из недостатков самая высокая цена по сравнению с другими типами.
Способы подключения обмоток возбуждения
Коллекторные двигатели постоянного тока могут иметь КПД от 8-10% до 85-88%. Зависит от типа подключения. Но высокопродуктивные отличаются высокими оборотами (тысячи оборотов в минуту, реже сотни) и низким моментом, так что они идеальны для вентиляторов. Для любой другой техники используют низкооборотистые модели с малым КПД, либо к продуктивным моделям добавляют редуктор, другого решения пока не нашли.
Универсальные коллекторные двигатели
Несмотря на то, что коллекторный узел можно назвать самым слабым местом электродвигателя, подобные модели нашли широкое применение. Все благодаря невысокой цене и легкости управления скоростью. Коллекторные двигатели переменного тока стоят практически в любой бытовой технике, как крупной, так и мелкой. Миксеры, блендеры, кофемолки, строительные фены, даже стиральные машины (привод барабана).
Все благодаря невысокой цене и легкости управления скоростью. Коллекторные двигатели переменного тока стоят практически в любой бытовой технике, как крупной, так и мелкой. Миксеры, блендеры, кофемолки, строительные фены, даже стиральные машины (привод барабана).
Универсальный коллекторный двигатель работает от постоянного и переменного напряжения
По строению универсальные коллекторные двигатели не отличаются от моделей постоянного тока с обмотками возбуждения. Разница, безусловно есть, но она не в устройстве, а в деталях:
- Схема возбуждения всегда последовательная.
- Магнитные системы ротора и статора для компенсации магнитных потерь делают шихтованного типа (единая система без сплошных разрезов).
- Обмотка возбуждения состоит из нескольких секций. Это необходимо, чтобы режимы работы на постоянном и переменном напряжении были схожи.
Работа коллекторных электродвигателей универсального типа основана на том, что если одновременно (или почти одновременно) поменять полярность питания на обмотках статора и ротора, направление результирующего момента останется тем же. При последовательной схеме возбуждения полярность меняется с очень небольшой задержкой. Так что направление вращения ротора остается тем же.
При последовательной схеме возбуждения полярность меняется с очень небольшой задержкой. Так что направление вращения ротора остается тем же.
Достоинства и недостатки
Хотя универсальные коллекторные двигатели активно используются, они имеют серьёзные недостатки:
- Более низкий КПД при работе на переменном токе (если сравнивать с работой на постоянном такого же напряжения).
- Сильное искрение коллекторного узла на переменном токе.
- Создают радиопомехи.
- Повышенный уровень шума при работе.
Во многих моделях строительной техники
Но все эти недостатки нивелируются тем, что при частоте питающего напряжения в 50 Гц они могут вращаться со скоростью 9000-10000 об/мин. По сравнению с синхронными и асинхронными двигателями это очень много, максимальная их скорость — 3000 об/мин. Именно это обусловило использование этого типа моторов в бытовой технике. Но постепенно они заменяются современными бесщеточными двигателями. С развитием полупроводников их производство и управление становится всё более дешёвым и простым.
Асинхронный двигатель: устройство, виды, принцип работы
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Содержание статьи
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
По способу вращения двигатели делят на синхронные и асинхронные.
Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.
Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов.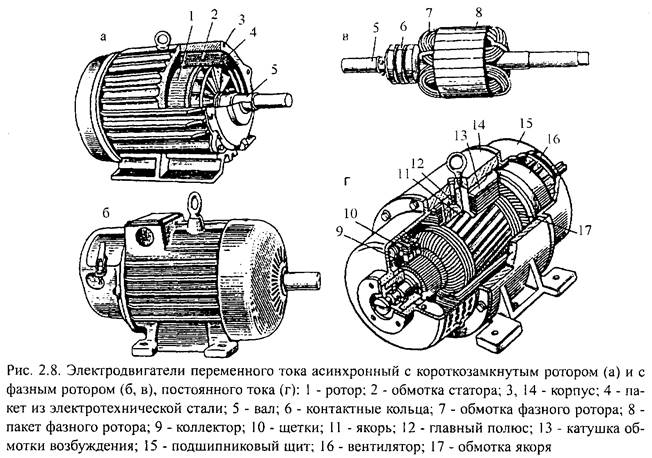 Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.
Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками.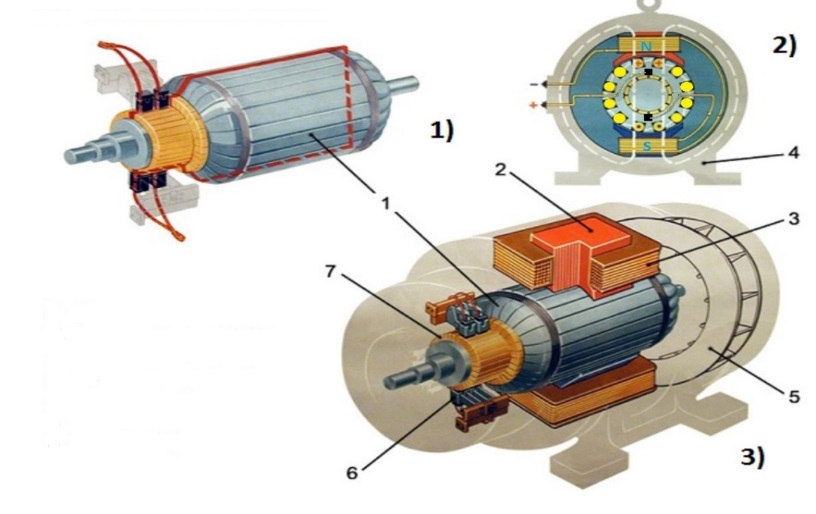 Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».
Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.
Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.
Асинхронный двигатель с фазным ротором
Для фиксации ротора к корпусу статора делают две крышки с подшипниками. На одной из крышек закрепляются щетки, которые прижимаются к кольцам на валу, за счёт чего имеют с ними хороший контакт. Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Что лучше короткозамкнутый или фазный?
Несмотря на то что двигатели с фазовым ротором лучше стартуют, позволяют в процессе работы плавно менять скорость при помощи обычного реостата, чаще применяется моторы короткозамкнутого типа. В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.
Какой лучше: короткозамкнутый ротор или фазный
Тем не менее стоит более подробно ознакомиться с достоинствами и недостатками обоих типов асинхронных двигателей. Итак, достоинства короткозамкнутого асинхронного двигателя:
- Простая конструкция.
- Лёгкое обслуживание.
- Более высокий КПД.
- Нет искрообразования.
Недостатки:
- Малый пусковой крутящий момент.
- Высокий пусковой ток (в 4-7 раз выше номинального).
- Нет возможности регулировать скорость.
Магнитное поле трехфазного статора толкает ротор
Из-за высокого пускового тока прямое включение допускается для двигателей мощностью до 200 кВт. Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Преимущество асинхронного фазного двигателя:
- Быстрый и беспроблемный старт.
- Позволяет менять скорость в процессе работы.

- Прямое подключение возможно, практически без ограничения мощности.
Недостатки тоже есть: наличие щёток, возможность искрения, сложное и частое обслуживание.
Как регулируется частота вращения
Как уже писали, частота вращения ротора зависит от количества полюсов статора. Чем больше количество полюсов, тем меньше скорость. Но это не только так можно регулировать скорость вращения. Она еще зависит от напряжения и частоты питания.
Способы регулирования частоты асинхронного двигателя
Напряжение можно регулировать, установив потенциометр на входе. Частоту регулируют поставив частотный преобразователь. Частотник — более выгодное решение, так как он ещё и снижает стартовые токи и может быть программируемым.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.
Потому может называться ещё пусковой или стартовой.
Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора.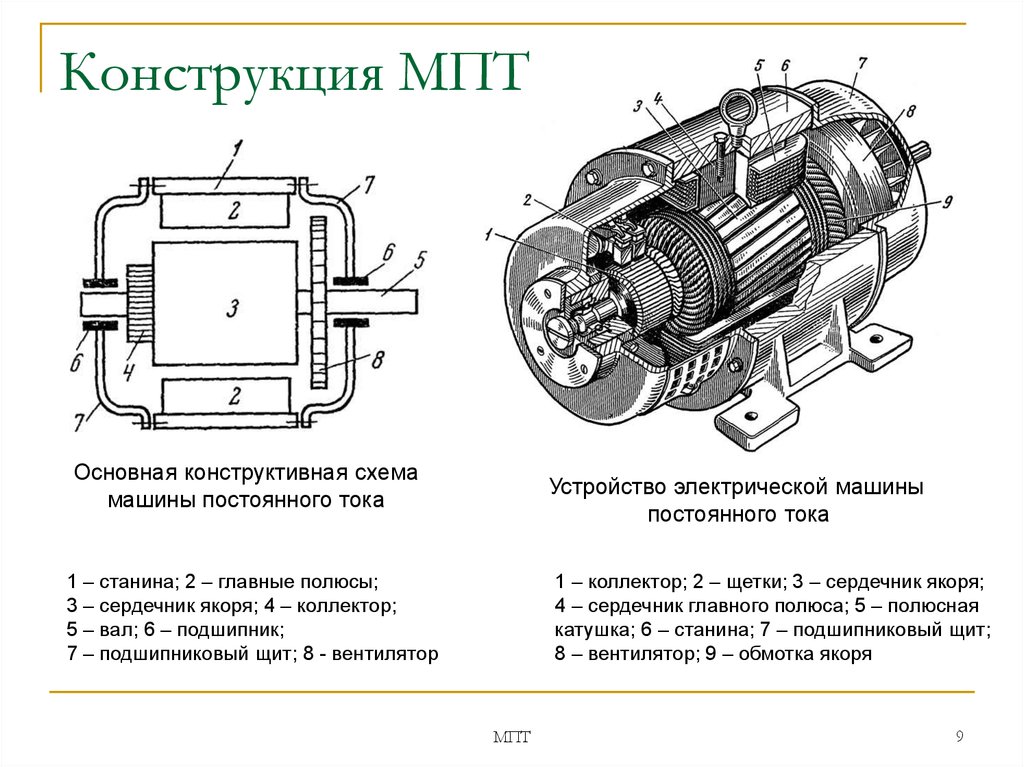 Затем стартовая обмотка отключается, вращение поддерживает основная.
Затем стартовая обмотка отключается, вращение поддерживает основная.
| Электродвигатели, генераторы, генераторы переменного тока и громкоговорители объясняются с помощью анимации и схем. Это ресурсная страница Physclips, многоуровневого мультимедийного введения в физику (загрузите анимацию с этой страницы). Двигатели постоянного токаПростой двигатель постоянного тока имеет катушку с проволокой, которая может вращаться в магнитном поле. В ток в катушке подается через две щетки, которые обеспечивают подвижный контакт с разрезное кольцо.Катушка находится в постоянном магнитном поле. Силы приложили на токоведущих проводах создают крутящий момент на катушке. Сила F на проводе длиной L, по которому течет ток i в магнитном поле. B равно iLB, умноженному на синус угла между B и i, который будет равен 90 °, если поля были равномерно вертикальными. Направление F идет справа
правило руки *, как показано здесь. Две силы, показанные здесь, равны и противоположны,
но они смещены вертикально, поэтому создают крутящий момент.(Силы на
две другие стороны катушки действуют по одной и той же линии и поэтому не создают крутящего момента.) Направление F идет справа
правило руки *, как показано здесь. Две силы, показанные здесь, равны и противоположны,
но они смещены вертикально, поэтому создают крутящий момент.(Силы на
две другие стороны катушки действуют по одной и той же линии и поэтому не создают крутящего момента.)
Обратите внимание на эффект щеток на разрезном кольце . Когда
плоскость вращающейся катушки достигает горизонтали, щетки разорвут контакт
(теряется не так много, потому что это точка нулевого момента все равно — силы
действовать внутрь).Угловой момент катушки переносит ее через этот разрыв
точка, и ток затем течет в противоположном направлении, которое меняет направление
магнитный диполь. Итак, после прохождения точки останова ротор продолжает движение.
повернуть против часовой стрелки и начать выравнивание в обратном направлении. в
В следующем тексте я буду в основном использовать картинку «крутящий момент на магните», но
имейте в виду, что использование щеток или переменного тока может привести к появлению полюсов
электромагнит, о котором идет речь, меняет положение, когда ток меняет направление. Крутящий момент, создаваемый в течение цикла, зависит от вертикального разделения две силы. Следовательно, это зависит от синуса угла между ось катушки и поле. Однако из-за разрезного кольца оно всегда в том же смысле. Анимация ниже показывает его изменение во времени, а вы можно остановить на любом этапе и проверить направление, приложив правую руку правило. Двигатели и генераторыТеперь двигатель постоянного тока также является генератором постоянного тока.Взгляните на следующую анимацию. В катушка, разрезное кольцо, щетки и магнит — это то же оборудование, что и двигатель выше, но катушка вращается, что генерирует ЭДС. Если вы используете механическую энергию для вращения катушки (N витков, область A) с равномерной
угловая скорость ω в магнитном поле B ,
это создаст в катушке синусоидальную ЭДС. ЭДС (ЭДС или электродвижущая сила — это почти то же самое, что и напряжение). ГенераторЕсли нам нужен AC, нам не нужно исправление, поэтому нам не нужны разрезные кольца. (Этот это хорошая новость, потому что разрезные кольца вызывают искры, озон, радиопомехи и дополнительный износ. Если хочешь Постоянный ток, часто лучше использовать генератор и выпрямлять диоды.)На следующей анимации две кисти соприкасаются с двумя непрерывными кольцами, поэтому две внешние клеммы всегда подключены к одним и тем же концам катушки.Результатом является не исправленная синусоидальная ЭДС, заданная NBAω sin ωt, который показан на следующей анимации. Это генератор переменного тока. Преимущества переменного и постоянного тока генераторы сравниваются в разделе ниже. Выше мы видели, что двигатель постоянного тока также является генератором постоянного тока. Точно так же генератор переменного тока также является двигателем переменного тока. Тем не мение, он довольно негибкий. (Смотри как настоящие электродвигатели работают для более подробной информации.) Задняя ЭДСТеперь, как показывают первые две анимации, двигатели и генераторы постоянного тока могут быть то же самое.Например, двигатели поездов становятся генераторами, когда поезд замедляется: они преобразуют кинетическую энергию в электрическую и мощность обратно в сеть. В последнее время несколько производителей начали выпуск автомобилей. рационально. В таких автомобилях электродвигатели, используемые для привода автомобиля, также используется для зарядки аккумуляторов при остановке автомобиля — это называется регенеративным торможение.Итак, вот интересное следствие. Каждый двигатель — это генератор . Это правда, в некотором смысле, даже когда он действует как двигатель.ЭДС, что мотор генерирует называется обратной ЭДС . Обратная ЭДС увеличивается с увеличением скорость из-за закона Фарадея. Итак, если на двигатель нет нагрузки, он очень сильно крутится. быстро и разгоняется до появления обратной ЭДС плюс падение напряжения из-за потерь, равно напряжению питания. Обратную ЭДС можно рассматривать как «регулятор»: он останавливает бесконечно быстро вращающийся двигатель (что избавляет физиков от некоторых затруднений). Когда двигатель загружен, то фаза напряжения становится ближе к фазе тока (начинает выглядят резистивными), и это кажущееся сопротивление дает напряжение.Итак, спина Требуемая ЭДС меньше, и двигатель вращается медленнее. (Чтобы добавить обратно ЭДС, которая является индуктивной, к резистивной составляющей необходимо добавить напряжения которые не в фазе. См. AC схем.) Катушки обычно имеют сердечники На практике (и в отличие от схем, которые мы нарисовали) генераторы и постоянный ток двигатели часто имеют сердечник с высокой проницаемостью внутри катушки, так что большие магнитные поля создаются умеренными токами. Это показано слева в рисунок ниже, на котором статоров (магниты, которые являются статическими) постоянные магниты. Моторы универсальныеМагниты статора тоже могут быть выполнены в виде электромагнитов, как показано выше. справа. Два статора намотаны в одном направлении, чтобы поле в том же направлении, а ротор имеет поле, которое дважды меняет направление за цикл, потому что он подключен к щеткам, которые здесь не указаны. Один Преимущество наличия статоров в двигателе состоит в том, что можно сделать двигатель который работает от переменного или постоянного тока, так называемый универсальный двигатель .Когда вы едете у такого мотора с переменным током ток в катушке меняется дважды за каждый цикл (помимо изменений со щеток) а вот полярность статоров изменяется одновременно, поэтому эти изменения отменяются. (К сожалению, кисти еще остались, хотя я спрятал их в этом эскизе.) недостатки постоянного магнита по сравнению со статорами с обмоткой см. ниже. Также смотрите больше на универсальных моторах. Построить простой моторЧтобы построить этот простой, но странный мотор, вам понадобятся два довольно сильных магнита. (подойдут редкоземельные магниты диаметром около 10 мм, магниты), жесткий медный провод (не менее 50 см), два провода с крокодиловой зажимы на обоих концах, фонарь на шесть вольт, две банки безалкогольных напитков, два блока дерева, липкой ленты и острого гвоздя.Сделайте катушку из жесткой медной проволоки, чтобы не нуждаться во внешних служба поддержки. Намотайте от 5 до 20 витков по кругу диаметром около 20 мм и два конца радиально направлены наружу в противоположных направлениях. Эти цели будут быть одновременно осью и контактами. Если провод имеет лаковую или пластиковую изоляцию, снимите его с концов.
Двигатели переменного токаС помощью переменного тока мы можем изменить направление поля без использования щеток.Это хорошая новость, потому что мы можем избежать дуги, образования озона и омическая потеря энергии, которую могут вызвать щетки. Далее, поскольку кисти контактируют между движущимися поверхностями, они изнашиваются.Первое, что нужно сделать в двигателе переменного тока, — это создать вращающееся поле. ‘Обычный’ Переменный ток от 2-х или 3-х контактной розетки — это однофазный переменный ток — он имеет одну синусоидальную разность потенциалов создается только между двумя проводами — активным и нейтральным. (Обратите внимание, что заземляющий провод не пропускает ток, за исключением электрические неисправности.) При однофазном переменном токе можно создать вращающееся поле. за счет генерации двух противофазных токов с помощью, например, конденсатора. В показанном примере два тока сдвинуты по фазе на 90 °, поэтому вертикальный составляющая магнитного поля синусоидальная, а горизонтальная косусоидальная, как показано. Это дает поле, вращающееся против часовой стрелки. (* Меня попросили объяснить это: из простого AC Теоретически, ни катушки, ни конденсаторы не имеют напряжения в фазе с электрический ток.В конденсаторе напряжение максимально, когда заряд закончил течь на конденсатор и вот-вот начнет стекать. Таким образом, напряжение отстает от тока. В чисто индуктивной катушке падение напряжения является самым большим, когда ток изменяется наиболее быстро, что также когда ток равен нулю. Напряжение (падение) опережает ток. В моторных катушках фазовый угол меньше 90, потому что электрические энергия преобразуется в механическую энергию.) На этой анимации графики показывают изменение токов во времени. в вертикальных и горизонтальных витках. График компонент поля B x и B y показывает, что векторная сумма этих двух полей является вращающейся поле. Основное изображение показывает вращающееся поле. Он также показывает полярность магнитов: как указано выше, синий представляет северный полюс, а красный — южный полюс. Если мы поместим постоянный магнит в эту область вращающегося поля, или если мы положим в катушке, ток которой всегда течет в одном и том же направлении, тогда это становится синхронный двигатель .В широком диапазоне условий двигатель будет повернуть со скоростью магнитного поля. Если у нас будет много статоров, вместо этого всего двух пар, показанных здесь, то мы могли бы рассматривать его как шаговый двигатель: каждый импульс перемещает ротор на следующую пару задействованных полюсов. Пожалуйста, помните мое предупреждение об идеализированной геометрии: настоящие шаговые двигатели десятки полюсов и довольно сложные геометрические формы! Двигатели асинхронныеТеперь, поскольку у нас есть изменяющееся во времени магнитное поле, мы можем использовать наведенную ЭДС в катушке — или даже просто вихревые токи в проводнике — чтобы ротор магнит.Правильно, если у вас есть вращающееся магнитное поле, вы можете просто вставил проводник и получается. Это дает несколько преимуществ асинхронные двигатели : отсутствие щеток или коммутатора означает более простое производство, нет износ, отсутствие искр, отсутствие образования озона и отсутствие связанных с этим потерь энергии с ними. Внизу слева схематическое изображение асинхронного двигателя. (Для фотографий настоящие асинхронные двигатели и подробнее см. Индукция. двигатели.)Анимация справа представляет двигатель с короткозамкнутым ротором .Белка клетка имеет (во всяком случае, в этой упрощенной геометрии!) два круглых проводника, соединенных несколькими прямыми стержнями. Любые два стержня и соединяющие их дуги образуют катушка — на что указывают синие черточки на анимации. (Только два из для простоты показано много возможных схем.) На этой схеме показано, почему их можно назвать двигателями с короткозамкнутым ротором. Реальность иная: фотографии и подробности см. В разделе «Индукция». моторы. Проблема с показанными асинхронными двигателями и двигателями с короткозамкнутым ротором в этой анимации показано, что конденсаторы высокой стоимости и высокого напряжения дорогие.Одно из решений — двигатель с экранированным полюсом, но его вращающийся поле имеет некоторые направления, в которых крутящий момент небольшой, и имеет тенденцию бежать назад при некоторых условиях. Самый простой способ избежать этого — использовать многофазные двигатели. Трехфазные асинхронные двигатели переменного токаОднофазный используется в домашних условиях для приложений с низким энергопотреблением, но у него есть некоторые недостатки. Во-первых, он выключается 100 раз в секунду (вы не обратите внимание, что флуоресцентные лампы мигают с такой скоростью, потому что ваши глаза слишком медленные: даже 25 изображений в секунду на экране телевизора достаточно, чтобы дать иллюзия непрерывного движения.) Во-вторых, это делает его неловким для создания вращающихся магнитных полей. По этой причине некоторые высокие мощности (несколько кВт) для бытовых устройств может потребоваться трехфазная установка. Промышленное применение широко использовать трехфазный двигатель, трехфазный асинхронный двигатель является стандартным рабочая лошадка для приложений большой мощности. Три провода (не считая земли) несут три возможных разности потенциалов, которые не совпадают по фазе с каждым другое на 120 °, как показано на анимации ниже. Таким образом, три статора плавно вращающееся поле.(Посмотри это ссылку для получения дополнительной информации о трехфазном питании.)Если поместить постоянный магнит в такой набор статоров, он станет синхронным трехфазный двигатель . На анимации изображена беличья клетка, в которой простота показана только одна из многих петель наведенного тока. Без механической нагрузки, он вращается практически синхронно с вращающимся полем. Ротор не обязательно должен быть беличьей клеткой: фактически любой проводник, который будет переносящие вихревые токи будут вращаться, стремясь следовать за вращающимся полем.Такая компоновка может дать асинхронный двигатель , обладающий высоким КПД, высокая мощность и высокие крутящие моменты в диапазоне скоростей вращения. Линейные двигателиНабор катушек можно использовать для создания магнитного поля, которое переводит, скорее, чем вращается. На паре катушек на анимации ниже подается импульс от слева направо, поэтому область магнитного поля перемещается слева направо. А постоянный или электромагнит будет стремиться следовать за полем. Так что простой плита из проводящего материала, потому что наведенные в ней вихревые токи (не показаны) содержат электромагнит.В качестве альтернативы мы могли бы сказать, что из Фарадея закон, ЭДС в металлической плите всегда индуцируется, чтобы противодействовать любому изменению в магнитном потоке, а силы на токах, вызванные этой ЭДС, сохраняют поток в плите почти постоянный. (Вихревые токи на этой анимации не показаны.)В качестве альтернативы мы могли бы иметь комплекты катушек с питанием в движущейся части, и наводить вихревые токи в рельсе. В любом случае получается линейный двигатель, что было бы полезно, скажем, для поездов на магнитной подвеске.(В анимации геометрия как обычно на этом сайте, в высшей степени идеализирован, и только один вихревой ток показан.) Некоторые примечания к двигателям переменного и постоянного тока для приложений большой мощности
Однофазные асинхронные двигатели имеют проблемы при объединении приложений высокая мощность и гибкие условия нагрузки. Проблема заключается в создании вращающееся поле. Конденсатор может использоваться для подачи тока в один набор катушки впереди, но дорогие высоковольтные конденсаторы стоят дорого. Затененный Вместо них используются полюса, но под некоторыми углами крутящий момент невелик. Если нельзя создают плавно вращающееся поле, и если груз «проскальзывает» далеко за поле, то крутящий момент падает или даже меняется на противоположное. В электроинструментах и некоторых приборах используются щеточные электродвигатели переменного тока. Кисти вводят потери (плюс образование дуги и озона). Обратная полярность статора 100 раз в секунду. Даже если материал сердечника выбран так, чтобы минимизировать гистерезис потерь («потери в железе»), это способствует неэффективности и возможности перегрева. Эти моторы можно назвать универсальными. двигатели, потому что они могут работать от постоянного тока. Решение дешевое, но грубое и неэффективно. Для приложений с относительно низким энергопотреблением, таких как электроинструменты, неэффективность обычно экономически не важна. Если доступен только однофазный переменный ток, можно исправить переменный ток и использовать Двигатель постоянного тока. Раньше сильноточные выпрямители были дорогими, но сейчас они становятся все более дорогими. менее дорогой и более широко используемый. Если вы уверены, что понимаете принципы, пора перейти к Как настоящие электродвигатели работают Джона Стори. Или продолжайте здесь, чтобы найти о громкоговорителях и трансформаторах. ГромкоговорителиГромкоговоритель — это линейный двигатель с небольшим диапазоном.Имеет одиночный ход катушка, которая постоянно, но гибко подключена к источнику напряжения, поэтому нет кистей.
Громкоговорители как микрофоныНа картинке выше вы можете видеть, что картонная диафрагма (конус динамика) соединена с катушкой провода в магнитном поле. Если звуковая волна перемещает диафрагму, катушка будет двигаться в поле, создавая напряжение. Это принцип динамического микрофона — хотя в большинстве микрофонов диафрагма намного меньше конуса громкоговорителя. Итак, динамик должен работать как микрофон. Хороший проект: все, что вам нужно, это громкоговоритель и два провода, чтобы подключить его ко входу осциллографа или микрофонному входу вашего компьютера.Два вопроса: как вы думаете, что масса диффузора и катушки повлияет на частотную характеристику? Как насчет длины волны звуков, которые вы используете?
ТрансформаторыНа фотографии изображен трансформатор, предназначенный для демонстрационных целей: первичная и вторичная катушки четко разделены и могут быть удалены и заменен поднятием верхней части сердечника. Для наших целей отметим что у катушки слева меньше катушек, чем у правой (вставки показать крупные планы). На эскизе и схеме показан повышающий трансформатор. Чтобы сделать понижающий трансформатор, достаточно разместить источник справа, а нагрузку — слева. ( Важно Примечание по безопасности : для настоящего трансформатора вы можете только «подключить его задним ходом» только после проверки соответствия номинального напряжения.) Итак, как трансформатор работает?Сердечник (заштрихованный) имеет высокую магнитную проницаемость, т.е. материал, образующий магнитное поле намного легче, чем свободное пространство, из-за ориентации атомных диполей.(На фотографии сердечник — ламинированное мягкое железо.) В результате поле сосредоточено внутри ядра, и почти силовые линии не выходят из ядра. Если следует, что магнитные потоки φ через первичный и вторичный примерно равны, как показано. Из Фарадея По закону ЭДС на каждом витке, будь то первичная или вторичная обмотка, равна -dφ / dt. Если пренебречь сопротивлением и другими потерями в трансформаторе, вывод напряжение равно ЭДС. Для N p витков первичной обмотки, это дает Для N с витками вторичной обмотки это дает Разделив эти уравнения, мы получим уравнение трансформатора где r — коэффициент поворотов.А что с током? Если пренебречь потерями в трансформатор (см. ниже раздел об эффективности), и если мы предположим, что напряжение и ток имеют одинаковое фазовое соотношение в первичной и вторичный, то из сохранения энергии мы можем записать в устойчивом состоянии:
V p I p = V s I s , откуда I с / I p = N p / N с = 1 / r. В некоторых случаях целью упражнения является уменьшение силы тока. В силе линий передачи, например, потери мощности при нагревании проводов из-за их ненулевое сопротивление пропорционально квадрату тока.Таким образом, передача электроэнергии от электростанции экономит много энергии. в город при очень высоких напряжениях, так что токи невелики. Наконец, и снова предполагая, что трансформатор идеален, давайте спросим, что резистор во вторичной цепи «похож» на первичную цепь. В первичном контуре:
V p / I p = V s / r 2 I s = Р / р 2 . КПД трансформаторовНа практике реальные трансформаторы имеют КПД менее 100%.
Подробнее о трансформаторах: генераторы переменного и постоянного токаТрансформаторы работают только от переменного тока, что является одним из больших преимуществ переменного тока. Трансформеры позволяют понижать 240 В до уровня, удобного для цифровой электроники (всего несколько вольт) или для других приложений с низким энергопотреблением (обычно 12 В). Трансформеры повышайте напряжение для передачи, как упомянуто выше, и понижайте для безопасности распространение. Без трансформаторов потери электроэнергии при распределении сети, и без того высокие, были бы огромными.Возможно преобразование напряжения в DC, но сложнее, чем в AC. Кроме того, такие преобразования часто неэффективно и / или дорого. Дополнительным преимуществом переменного тока является то, что его можно использовать на двигателях переменного тока, которые обычно предпочтительнее двигателей постоянного тока для приложений большой мощности.Другие ресурсы от насНекоторые внешние ссылки на веб-ресурсы по двигателям и генераторам
В чем разница между постоянными магнитами и наличие электромагнитов в двигателе постоянного тока? Это делает его более эффективным или более могущественный? Или просто дешевле? Когда я получил этот вопрос на Высшем Доска объявлений школьной физики, я отправил ее Джону Стори, выдающийся астроном и строитель электромобилей.Вот его ответ: В общем, для маленького мотора намного дешевле использовать постоянные магниты. Материалы для постоянных магнитов продолжают совершенствоваться и стали настолько недорогими что даже правительство иногда присылает вам бессмысленные магниты на холодильник через почту. Постоянные магниты также более эффективны, потому что нет энергии тратится на создание магнитного поля. Так зачем вообще использовать раневое поле Двигатель постоянного тока? Вот несколько причин:
Мнения, выраженные в этих заметках, принадлежат мне и не обязательно отражают политика Университета Нового Южного Уэльса или Школы физики.В анимации сделал Джордж Hatsidimitris. Джо Вулф / [email protected]/ 61-2-9385 4954 (UT + 10, +11 окт-март) |
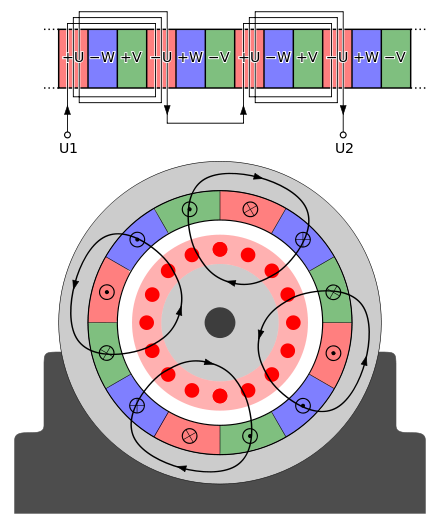
 Пусть θ будет
угол между B и нормалью к катушке, поэтому магнитный поток φ равен
НАБ.cos θ. Закон Фарадея дает:
Пусть θ будет
угол между B и нормалью к катушке, поэтому магнитный поток φ равен
НАБ.cos θ. Закон Фарадея дает:Двигатели постоянного тока | Принцип работы | Ресурсы для инженеров
Электродвигатели, работающие на электромагнетизме. Однако существуют и другие типы двигателей, в которых используются электростатические силы или пьезоэлектрический эффект. В случае двигателя PMDC (постоянного магнита постоянного тока) движение создается электромагнитом (якорем), взаимодействующим с магнитом с фиксированным полем (корпус в сборе).
В щеточном двигателе электрический ток протекает через клеммы двигателя в узле торцевой крышки, который входит в контакт с коммутатором в узле якоря через угольные щетки или щеточные листы. Электрический ток питает катушки, создавая магнитное поле, заставляющее якорь вращаться, когда он взаимодействует с магнитами, заключенными в корпус в сборе. Правило левой руки Флемминга помогает определить направление силы, тока и магнитного потока.
В бесщеточном двигателе, когда электричество подается на клемму двигателя, ток течет через фиксированное поле статора и взаимодействует с движущимся постоянным магнитом или движущимся индуцированным магнитным полем внутри ротора / якоря.После того, как движение и силовая нагрузка будут удовлетворены доступным источником тока, он возвращается обратно к источнику, выходящему из двигателя.
Ключевые элементы, взаимодействующие для создания движения
Магнитный поток — Двигатель может иметь катушку с фиксированной обмоткой или статор с постоянным магнитом, а также якорь с подвижной обмоткой или ротор с постоянными магнитами, которые будут иметь взаимодействующие поля магнитного потока для создания силы и движения.
Сила — Величина тока, протекающего через электромагнитное поле, пропорциональна величине силы взаимодействующего электромагнитного поля, необходимой для достижения противоположной рабочей нагрузки.Помимо силы и движения, необходимых для устройства, необходимо учитывать любую потерю эффективности при преобразовании электроэнергии в механическую работу (ватты).
Обзор шагового двигателя
Что такое шаговый двигатель
Шаговые двигатели работают иначе, чем другие двигатели постоянного тока, которые просто вращаются при подаче напряжения. Вращательный шаговый двигатель — это электромеханическое устройство, которое может разделить один полный оборот (360 °) на большое количество шагов вращения. Шаговые двигатели управляются электронно и не требуют дорогостоящих устройств обратной связи.Линейный шаговый двигатель подобен вращающемуся двигателю, за исключением того, что вал движется линейно или продольно. Оба типа имеют две схемы обмотки электромагнитных катушек: униполярную и биполярную. Униполярный означает, что каждый конец катушки имеет одну полярность. Рекомендуемый стабилитрон используется для обеспечения быстрого спада тока в отключенной катушке. Это приведет к увеличению крутящего момента двигателя, особенно на более высоких частотах.
Биполярный означает, что каждый конец катушки имеет обе полярности.Катушка будет положительной и отрицательной во время каждого цикла движения. Поскольку каждая катушка используется полностью, двигатель имеет более высокий крутящий момент по сравнению с униполярной катушкой. Биполярный драйвер может включать в себя возможность управления постоянным током, называемую приводом прерывателя. Это обеспечит увеличенный выходной крутящий момент на более высоких частотах и снизит влияние колебаний температуры и напряжения питания.
Основные сведения о шаговом двигателе
Шаговый двигатель PM или «консервная банка» — это недорогое решение для ваших приложений позиционирования с типичным углом шага 7.5 ° — 15 °. Меньшие углы шага могут быть получены с помощью Microstepping. Вал двигателя перемещается с определенным шагом при подаче электрических управляющих импульсов. Текущая полярность и частота подаваемых импульсов определяют направление и скорость движения вала.
Одним из наиболее значительных преимуществ шагового двигателя является его способность точно регулироваться в системе без обратной связи. Управление разомкнутым контуром означает, что обратная связь о положении вала не требуется.Этот тип управления устраняет необходимость в дорогостоящих устройствах обратной связи, просто отслеживая входные ступенчатые импульсы. Шаговый двигатель — хороший выбор, когда требуется контролируемое движение. Они рекомендуются в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронизм. Возможности фиксации, удержания, втягивания и извлечения крутящего момента, скорости (об / мин) и шагов на оборот (угол шага) характеризуют шаговый двигатель.
Момент фиксации — определяет максимальный крутящий момент, который может быть приложен к обесточенному двигателю, не вызывая вращения двигателя.
Удерживающий момент — определяет максимальный крутящий момент, с которым двигатель под напряжением может быть нагружен, не вызывая вращательного движения.
Pull-In — производительность определяет способность двигателя запускаться или останавливаться. Это максимальная частота, при которой двигатель может запускаться или останавливаться мгновенно с приложенной нагрузкой без потери синхронизации.
Pull-Out определяет максимальный крутящий момент при применении рампы ускорения / замедления без потери шагов.Он определяет максимальную частоту, на которой двигатель может работать без потери синхронизма.
Наш шаговый двигатель можно комбинировать с полной линейкой редукторов для увеличения крутящего момента и снижения скорости.
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме звезды, обычно без внешнего подключения к нейтральной точке, либо по схеме треугольник.Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Encyclopædia Britannica, Inc.Основы работы асинхронного двигателя могут быть разработаны, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора.На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на рисунке ток в фазе a является максимально положительным, а в фазах b и c — это половина отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу.В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный. В результате, как показано на рисунке для t 2 , снова будет синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорционального величине и скорости поля относительно проводников.Поскольку проводники ротора замкнуты накоротко на каждом конце, это приведет к протеканию токов в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. На этом рисунке показана диаграмма токов ротора для мгновенного t 1 рисунка. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (т.е.е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение снижается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, при отсутствии избыточного крутящего момента для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Encyclopædia Britannica, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае было бы токами ротора на рисунке.Общий ток статора в каждой фазной обмотке является суммой синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Второй, или силовой, компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый, или намагничивающий, компонент отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для двигателей большой мощности и до около 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания.