
Тюнинг Тойота / Toyota — тюнинг ателье Soundspeed: запчасти и аксессуары для Тойота в Москве
- Главная
- О нас
- Портфолио
- Гарантии
- Законы
- Оплата
- Доставка
- Контакты
Дополнительное оборудование, тюнинг, ремонт, тех. обслуживание автомобилей ТОЙОТА/ЛЕКСУС, а также других автомобилей японского и корейского производства
Многоканальные
+7 495 775-43-84+7 495 775-43-85
Мы работаем
Пн-Вс: 9:00 — 19:00
Консультант онлайнВ вашей корзине
нет товаровОформить заказНаши последние работы
Электро-привод крышки багажника на Camry 70
Работает как при нажатии кнопки багажника, так и кнопки из салона.
Новые темы на нашем форуме
Портфолио: фотогалереи наших работ
| Аэродинамические обвесы и комплектующие Пошив салонов Видеорегистраторы/радар-детекторы Тонирование/бронирование | Тюнинг подсветки Салонные шторки Дополнительные мониторы Малярный участок | Салонная ярко-белая светодиодная подсветка Установка радиостанций Силовые обвесы Прочее |
Тюнинг автомобилей Тойота
О нашем тюнинг центре
Автоцентр широкого профиля «SoundSpeed» образовался из одноименной тюнинг студии «Скорость звука», которая была основана в далеком 2001 г. Отцами-основателями студии, ее основной рабочей единицей, а в последствии и руководящим составом, стала группа товарищей и специалистов в области авто безопасности, авто звука и авто тюнинга, за плечами которых к моменту основания собственного бизнеса уже был многолетний опыт работы по данным направлениям. Команда подобралась творческая, и по началу каждая новая работа была уникальной. Со временем удалось выработать и свой фирменный стиль работы, где доминирующими факторами стали такие критерии, как неординарность решений во всех без исключения направлениях деятельности и стремление к высокому качеству проведения работ. Подробнее
Отцами-основателями студии, ее основной рабочей единицей, а в последствии и руководящим составом, стала группа товарищей и специалистов в области авто безопасности, авто звука и авто тюнинга, за плечами которых к моменту основания собственного бизнеса уже был многолетний опыт работы по данным направлениям. Команда подобралась творческая, и по началу каждая новая работа была уникальной. Со временем удалось выработать и свой фирменный стиль работы, где доминирующими факторами стали такие критерии, как неординарность решений во всех без исключения направлениях деятельности и стремление к высокому качеству проведения работ. Подробнее
Наши гарантии
На все без исключения работы, проводимые нашим центром, предоставляется фирменная гарантия.
Фирменная гарантия на работы заключается в бесплатном и внеочередном (в день обращения) обслуживании клиента, с автомобилем которого возникло рекламационное обстоятельство.
Подробнее
Наши партнёры
Хотите получать новости о новинках тюнинга, наших акциях и скидках?
Тогда подписывайтесь!
Ваш email:
Конфиденциальность гарантированаПопулярные услуги Тойота
Мы принимаем к оплате
Мы в социальных сетях
ЛИКВИДАЦИЯ СКЛАДА Защитные и тонировочные пленки Аудио-видео Сопутствующие товары
Тюнинг интерьера Оптика, свет, подсветка Тюнинг двигателя, запчасти, расходники
Тюнинг экстерьера Дополнительное оборудование Шумоизоляция
Навесное и защитное оборудование Противоугонное оборудование Краска, косметика, парфюмерия
Скорость звука
Скорость звукаМенеджер скорости звука
Упростите управление своими профилями!
Функции приложения
Диспетчер скорости звука
Sound Speed Manager (SSM) призван объединить имеющиеся функции
в трех существующих приложениях, обрабатывающих профили скорости звука (SSP)
для подводных акустических систем: NOAA Velocipy, MAC SVP Editor и
Диспетчер SSP HydrOffice.
Sound Speed Manager был разработан для облегчения интеграции в существующие рабочие процессы сбора данных. Либеральная лицензия с открытым исходным кодом, используемая проектом (в частности, GNU LGPL), обеспечивает понимание выбранных решений обработки за счет готовой проверки исходного кода, а также возможность адаптировать приложение к потребностям конкретной организации.
Эта адаптация упрощается за счет модульной конструкции приложения со специфичным для NOAA функции организованы таким образом, чтобы их можно было легко деактивировать для пользователей, не являющихся пользователями NOAA.
Основные функции включают в себя: широкую поддержку широко используемых форматов профилей скорости звука,
полная интеграция с распространенными приложениями сбора/интеграции данных (например, Kongsberg SIS),
улучшение профиля на основе моделей реального времени и климатологических моделей, а также управление базой данных
собранные данные со встроенными функциями для анализа и визуализации. Благодаря долгосрочной поддержке и плану развития Sound Speed Manager представляет собой готовое приложение «под ключ».
для использования (и расширения) профессионалами и учреждениями гидрографического сообщества.
Благодаря долгосрочной поддержке и плану развития Sound Speed Manager представляет собой готовое приложение «под ключ».
для использования (и расширения) профессионалами и учреждениями гидрографического сообщества.
Приложение разработано совместно Центром картографирования прибрежных и океанских районов, UNH и
Лаборатория разработки береговой съемки NOAA (CSDL).
Sound Speed Manager написан на Python 3, текущая версия — 2023.0.4.
- Контакты: Г. Мазетти (UNH, CCOM); Б.Галлахер (NOAA,OCS), К.Чжан (NOAA,OCS)
ИСХОДНЫЙ КОД (кроссплатформенный)
репозиторий GitHub
УСТАНОВКА (Windows)
SSM 2022. 0.3 (предыдущий)
SSM 2023.0.4 (текущий)
0.3 (предыдущий)
SSM 2023.0.4 (текущий)
WOA09 Атлас WOA13 (температура) WOA13 (соленость)
WOA18 (температура) WOA18 (соленость)
SIS Эму 1.1.2 SSM_SIS 1.0.2 README
ДОКУМЕНТЫ
Онлайн-документы Руководство в формате PDF Поддержка
ССЫЛКИ
Границы 2020 бумага
Бумага US Hydro 2017 Статья ММСП
Презентация на AMS100 2020.
Презентация на INMARTECH 2018.
Учебное пособие по настройке Sound Speed Manager.
Учебник по использованию Sound Speed Manager.
Sound Speed Manager
Первичный интерфейс Sound Speed Manager. В этом конкретном примере импортируется приведение XBT. На правой панели отображается единственное значение солености, сохраненное в слепке (сплошным синим цветом), но ожидается, что она будет заменена соленостью, полученной с помощью модели (выделено оранжевым пунктиром). Эта операция также запускает пересчет значений скорости звука.
Диспетчер скорости звука
Пример ежедневного графика профиля скорости звука на основе выборок, хранящихся в диспетчере скорости звука.
Диспетчер скорости звука
Набор данных профиля скорости звука, хранящийся в базе данных SSM, экспортируется вместе с метаданными в формат KML для визуализации в Google Earth.
Управление береговой службы США
Инструменты торговли
Управление береговой службы проводит гидрографические исследования с использованием различного специализированного оборудования. От гидролокаторов до приливных станций, каждая единица оборудования играет особую роль в получении точных морских данных. карты для обеспечения безопасности моряка.
Видео: корабли NOAA, оснащенные многолучевыми эхолотами, исследуют большие участки дна океана, сбор огромного объема батиметрических и акустических данных обратного рассеяния для различных целей.
Многолучевые гидролокаторы крепятся к днищу судна для сбора данных.
Многолучевые эхолоты (МБЭС), как и другие гидроакустические системы, передают звуковую энергию и анализировать отраженный сигнал (эхо), отраженный от морского дна или других объектов. Многолучевые гидролокаторы излучают звуковые волны прямо из-под корпуса корабля, создавая веерообразное покрытие морского дна. Эти системы измеряют и записывают время для акустический сигнал для прохождения от передатчика (преобразователя) до морского дна (или объекта) и обратно к приемнику. Многолучевые сонары производят «полосу» зондирований (т. е. глубины) для обеспечения полного охвата территории. Зона покрытия на морском дне зависит от глубина воды, обычно в два-четыре раза превышающая глубину воды.
Многие системы MBES способны записывать данные акустического обратного рассеяния. Многолучевой
обратное рассеяние — это данные интенсивности, которые можно обработать для создания изображений с низким разрешением.
Обратное рассеяние регистрируется совместно с данными батиметрии и часто используется для помощи в
интерпретация и постобработка батиметрических данных.
Многолучевой
обратное рассеяние — это данные интенсивности, которые можно обработать для создания изображений с низким разрешением.
Обратное рассеяние регистрируется совместно с данными батиметрии и часто используется для помощи в
интерпретация и постобработка батиметрических данных.
Подразделения гидрографической разведки NOAA используют многолучевые эхолоты для получения полных и
частичное донное батиметрическое покрытие по всему району съемки для определения наименьших глубин
над критическими объектами, такими как обломки кораблекрушений, препятствия и опасности для судоходства, а также для
общее обнаружение объекта. В полевых модулях NOAA используются различные модели многолучевых полос. системы, установленные как на корпусе, так и на мачте, для проведения гидрографических исследований. Мультилучевое эхо
используемые звуковые системы должны соответствовать спецификациям, изложенным в гидрографических съемках NOS.
Спецификации и результаты.
системы, установленные как на корпусе, так и на мачте, для проведения гидрографических исследований. Мультилучевое эхо
используемые звуковые системы должны соответствовать спецификациям, изложенным в гидрографических съемках NOS.
Спецификации и результаты.
Гидролокатор бокового обзора — специализированный гидроакустический комплекс для поиска и обнаружения объектов на
морское дно. Как и другие гидролокаторы, боковое сканирование передает звуковую энергию и анализирует отдачу.
сигнал (эхо), отразившийся от морского дна или других объектов. Гидролокатор бокового обзора обычно
состоит из трех основных компонентов: буксировочного крюка, троса передачи и верхнего борта. блок обработки. При боковом сканировании передаваемая энергия принимает форму веера.
который подметает морское дно прямо из-под буксира в обе стороны, как правило, до
расстояние 100 метров.
блок обработки. При боковом сканировании передаваемая энергия принимает форму веера.
который подметает морское дно прямо из-под буксира в обе стороны, как правило, до
расстояние 100 метров.
Сила отраженного эха непрерывно записывается, создавая «картинку» дно океана. Например, объекты или элементы, выступающие над морским дном, создают сильная отдача (создание области света) и тени от этих объектов практически не создают обратный сигнал (создание темной области). В то время как форма морского дна и объектов на нем могут быть хорошо изображены, большинство систем бокового обзора не могут предоставить никакой информации о глубине.
Снимки бокового сканирования помогают находить и идентифицировать объекты на морском дне, такие как этот подводное крушение.
Подразделения гидрографической съемки NOAA используют гидролокаторы бокового обзора как для обнаружения объектов,
и
распознавание объектов. Гидролокатор бокового обзора обычно используется в сочетании с одним
луч
или многолучевая гидролокационная система для обеспечения полного охвата дна для побережья.
Опрос
опросы. Полевые подразделения NOAA используют различные модели гидролокаторов бокового обзора, установленных как на корпусе,
и
буксируемые конфигурации для гидрографических работ. Любая гидроакустическая система бокового обзора
нанятые должны соответствовать спецификациям, изложенным в гидрографических съемках NOS.
Спецификации и результаты.
Лидарная технология (обнаружение света и определение дальности) измеряет высоту или глубину путем анализа отражение импульсов лазерного излучения от объекта. Системы лидарной съемки как правило, устанавливаются на самолете и обеспечивают непрерывное непрерывное покрытие между землей и море.
Батиметрический лидар используется для определения глубины воды путем измерения временной задержки между
передача импульса и его обратный сигнал. Системы используют лазерные импульсы, полученные на
две частоты: низкочастотный инфракрасный импульс отражается от поверхности моря,
в то время как зеленый лазер более высокой частоты проникает сквозь толщу воды и отражает
со дна. Анализ этих двух отдельных импульсов используется для определения глубины воды.
и возвышения береговой линии. При хорошей прозрачности воды эти системы могут достигать глубины 50
метров.
При хорошей прозрачности воды эти системы могут достигать глубины 50
метров.
Батиметрический лидар также используется для получения данных в районах со сложными и суровыми условиями. береговая линия, где надводные суда не могут эффективно или безопасно работать из-за камней, водоросли или ломающийся прибой. Некоторые примеры этих областей включают Аляску, Северную Атлантику Побережье и Карибский бассейн.
Используя технологию, аналогичную батиметрическому лидару, многие полевые подразделения NOAA установили
топографические лазеры на их съемочных запусках для измерения и определения местоположения таких объектов, как
скалы, островки и небольшие острова. Лазерная головка производит шестнадцать лазерных лучей, которые
отражаются от целевого объекта и возвращаются лазерной головкой. Затем компьютер
использует эти данные вместе с точными данными позиционирования и ориентации (крена, тангажа и рыскания),
определить высоту и положение предмета. В отличие от бортовых лидаров, которые
получить батиметрию мелководья, лазер корабля не может проникнуть сквозь воду.
Затем компьютер
использует эти данные вместе с точными данными позиционирования и ориентации (крена, тангажа и рыскания),
определить высоту и положение предмета. В отличие от бортовых лидаров, которые
получить батиметрию мелководья, лазер корабля не может проникнуть сквозь воду.
Сбор батиметрических данных гидролокаторами в морской среде означает измерение пути и
расстояние прохождения звука от точки передачи до морского дна и обратно до
получить точку. Преломление происходит, когда скорость волны изменяется из-за изменения
среда, в которой распространяется волна. Волны, проходящие через среды
разная плотность вызывает преломление. Плотность воды зависит от солености,
температура и глубина воды. Для измерения плотности воды Береговая съемка
использует различные типы профилировщиков скорости звука.
Преломление происходит, когда скорость волны изменяется из-за изменения
среда, в которой распространяется волна. Волны, проходящие через среды
разная плотность вызывает преломление. Плотность воды зависит от солености,
температура и глубина воды. Для измерения плотности воды Береговая съемка
использует различные типы профилировщиков скорости звука.
Блок проводимости, температуры и глубины (CTD) содержит несколько встроенных датчиков
которые позволяют пользователю выбирать множество профилей плотности и передавать их на компьютер.
CTD имеет датчик давления для измерения глубины и небольшую крыльчатку для активного откачивания воды.
через термистор для считывания температуры и цепь измерения проводимости. К
измеряя проводимость, давление и температуру одновременно, CTD может рассчитать
скорость звука в воде по уравнению Чена-Мильеро. Жесткая клетка вокруг CTD
гарантирует, что жизненно важные кабели и датчики находятся на безопасном расстоянии от потенциальных
повреждать. Гидрографы должны использовать блок CTD только тогда, когда исследовательская платформа
стационарный. Профилограф движущегося судна (MVP) может разворачиваться со скоростью съемки и перемещаться по
весь столб воды. Система MVP — это автономная система профилирования, способная
отбор проб профилей водной толщи до глубины 200 м с судна, движущегося со скоростью до 12 узлов, и
более глубокие глубины на меньших скоростях.
Жесткая клетка вокруг CTD
гарантирует, что жизненно важные кабели и датчики находятся на безопасном расстоянии от потенциальных
повреждать. Гидрографы должны использовать блок CTD только тогда, когда исследовательская платформа
стационарный. Профилограф движущегося судна (MVP) может разворачиваться со скоростью съемки и перемещаться по
весь столб воды. Система MVP — это автономная система профилирования, способная
отбор проб профилей водной толщи до глубины 200 м с судна, движущегося со скоростью до 12 узлов, и
более глубокие глубины на меньших скоростях.
MVP полностью автономен и может управляться компьютером без
Требования к персоналу на палубе. Преимущества развертывания профилировщика скорости звука в
скорость значительна, особенно с кораблями флота. Остановка и оставление на станции
для периодических профилей скорости звука может означать значительное падение эффективности, учитывая, как
может потребоваться много времени, чтобы остановить, а затем возобновить съемочные операции.
Преимущества развертывания профилировщика скорости звука в
скорость значительна, особенно с кораблями флота. Остановка и оставление на станции
для периодических профилей скорости звука может означать значительное падение эффективности, учитывая, как
может потребоваться много времени, чтобы остановить, а затем возобновить съемочные операции.
Глобальная система позиционирования (GPS) является основой почти для всех измерений положения в
Гидрография НОАА. В дополнение к предоставлению информации о местонахождении исследовательских судов и
пусков, точное позиционирование требуется для ряда других элементов береговой
гидрография.
Стационарные средства навигационного оборудования (ATON) иногда обнаруживаются вне их опубликованных позиции. Расположение этих ATONS должно быть точно измерено для построения карты. НОАА использует методы статической GPS-съемки для позиционирования критически важных вспомогательных средств на уровне менее метра точность.
NOAA использует дифференциальные GPS-маяки, поддерживаемые Береговой охраной США, для повышения точности позиционные измерения. Однако в некоторых отдаленных районах, далеких от постоянных перепадов маяков или там, где местная топография блокирует сигнал маяков, NOAA устанавливает свои собственные временная станция DGPS для передачи корректоров к съемочным пускам.
Прибрежные объекты, такие как сваи и пирсы, должны быть точно изображены на морской
графики. В то время как методы дистанционного зондирования, такие как аэрофотосъемка, обычно являются наиболее
эффективные средства позиционирования этих элементов, Ренье часто находит новые функции, которые делают
не появляются в последних данных дистанционного зондирования. В этих случаях гидрографы используют переносные
ранцевых приемников DGPS, чтобы определить положение, размеры и атрибуты этих предметов.
В то время как методы дистанционного зондирования, такие как аэрофотосъемка, обычно являются наиболее
эффективные средства позиционирования этих элементов, Ренье часто находит новые функции, которые делают
не появляются в последних данных дистанционного зондирования. В этих случаях гидрографы используют переносные
ранцевых приемников DGPS, чтобы определить положение, размеры и атрибуты этих предметов.
NOAA также работает над установлением взаимосвязи между местными отсчетами уровня воды, такими как как средняя нижняя низкая вода и эллипсоидальная высота, полученные с помощью GPS. Чтобы помочь в этом усилий, NOAA использует двухчастотные статические методы GPS для измерения эллипсоидальной высоты станции уровня воды (прилива) с точностью до сантиметра.
Эталон представляет собой вертикальную опорную точку, и установление ее постоянства жизненно важно.
Глубины приливных вод на морских картах NOAA указаны относительно местного среднего нижнего минимума. Вода (MLLW). Определение этой точки отсчета и точных корректоров уровня воды для гидрография требует сети станций измерения уровня воды. В отдаленных районах, Гидрографические полевые группы NOAA устанавливают временные наземные мареографы или третичные мареографы. контрольные станции, дополняющие постоянную национальную сеть наблюдения за уровнем воды (NWLON) приливные станции, поддерживаемые Центром оперативных и океанографических исследований NOAA. Продукты и услуги (CO-OPS).
Устройство мареографа состоит из компьютера, помещенного в защищенный от непогоды корпус,
батареи и солнечная панель, резервуар с азотом, соединенный с отверстием на морском дне,
дипломированный персонал и компоненты для спутниковой восходящей линии связи. Манометр с газовой продувкой
имеет датчик для измерения уровня воды над отверстием. Кроме того, набор приливных
реперные точки устанавливаются вокруг гидрометрического поста, чтобы данные об уровне воды, собранные
датчик может быть уменьшен до данных о приливах, используемых для гидрографических исследований NOAA.
операции. Когда высота основного репера относительно отверстия составляет
известны, данные третичных станций могут быть сведены к данным о приливах и сравнены с
Станция NWLON.
Манометр с газовой продувкой
имеет датчик для измерения уровня воды над отверстием. Кроме того, набор приливных
реперные точки устанавливаются вокруг гидрометрического поста, чтобы данные об уровне воды, собранные
датчик может быть уменьшен до данных о приливах, используемых для гидрографических исследований NOAA.
операции. Когда высота основного репера относительно отверстия составляет
известны, данные третичных станций могут быть сведены к данным о приливах и сравнены с
Станция NWLON.
Отверстие должно быть прикреплено к пластине, которая затем утяжеляется на дно при погружении
гири, цепь или камень.
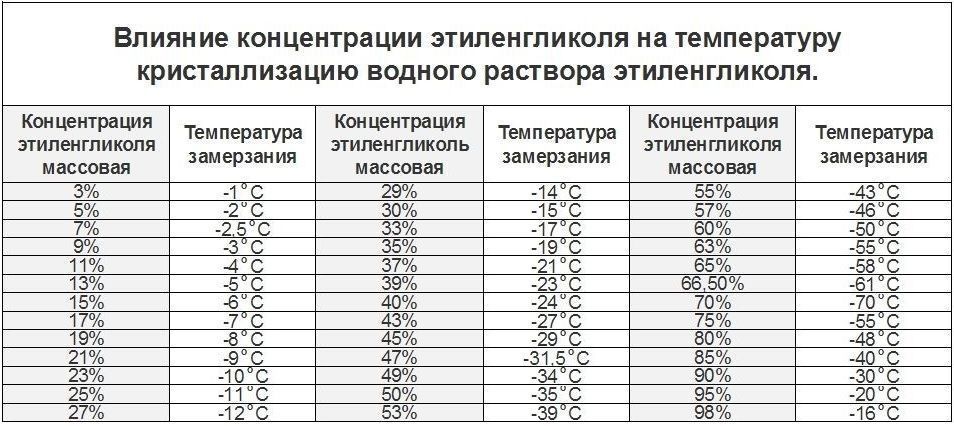
 Для большинства современных охлаждающих жидкостей этот показатель находится на уровне около 1,070-1,072 г/см3, что примерно соответствует температуре замерзания –40 °C. То есть антифриз тяжелее воды.
Для большинства современных охлаждающих жидкостей этот показатель находится на уровне около 1,070-1,072 г/см3, что примерно соответствует температуре замерзания –40 °C. То есть антифриз тяжелее воды. Что исключает необходимость самостоятельно поиска значений в таблице и делает саму процедуру более быстрой и удобной.
Что исключает необходимость самостоятельно поиска значений в таблице и делает саму процедуру более быстрой и удобной. Способ может претендовать на точность только в том случае, если весы гарантированно показывают правильную массу, а ёмкость вмещает ровно 1 литр жидкости.
Способ может претендовать на точность только в том случае, если весы гарантированно показывают правильную массу, а ёмкость вмещает ровно 1 литр жидкости.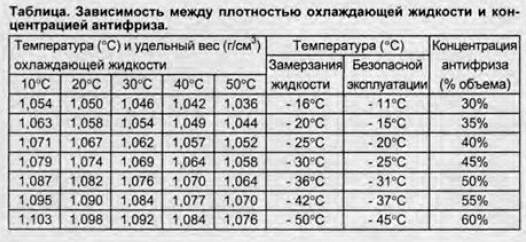 Поэтому перед заливкой важно знать, как проверить охлаждающую жидкость на качество. ОЖ изготавливается по специальной технологии с добавлением присадок, которые определяют срок эксплуатации и физические свойства состава. Водитель может проверить в домашних условиях почти все основные свойства антифриза, чтобы сделать вывод о его качестве. При использовании технической жидкости с дешевыми присадками возможны негативные последствия, вплоть до капитального ремонта мотора.
Поэтому перед заливкой важно знать, как проверить охлаждающую жидкость на качество. ОЖ изготавливается по специальной технологии с добавлением присадок, которые определяют срок эксплуатации и физические свойства состава. Водитель может проверить в домашних условиях почти все основные свойства антифриза, чтобы сделать вывод о его качестве. При использовании технической жидкости с дешевыми присадками возможны негативные последствия, вплоть до капитального ремонта мотора.

 Также если при нагревании образовался осадок – откажитесь от использования в авто такой ОЖ.
Также если при нагревании образовался осадок – откажитесь от использования в авто такой ОЖ. С целью проверки кислотности уже залитого состава, а также планируемого к заправке в контур, можно воспользоваться обычной лакмусовой бумажкой. Бумажка опускается в антифриз и через некоторое время меняет цвет, по которому легко определить параметр кислотности. При проверке таким способом сертифицированной жидкости цвет бумажки почти не меняется.
С целью проверки кислотности уже залитого состава, а также планируемого к заправке в контур, можно воспользоваться обычной лакмусовой бумажкой. Бумажка опускается в антифриз и через некоторое время меняет цвет, по которому легко определить параметр кислотности. При проверке таким способом сертифицированной жидкости цвет бумажки почти не меняется. Переключатель выбора режима мультиметра ставится в положение 50‒300 мВ, и считываются показатели, позволяющие определить ресурс присадок:
Переключатель выбора режима мультиметра ставится в положение 50‒300 мВ, и считываются показатели, позволяющие определить ресурс присадок:
 Уровень контролируется на холодной машине по отметкам на расширительном бачке. Если антифриз через короткое время уходит из системы, значит, нужно проверить целостность контура одним из способов:
Уровень контролируется на холодной машине по отметкам на расширительном бачке. Если антифриз через короткое время уходит из системы, значит, нужно проверить целостность контура одним из способов:
 Скорректировать концентрацию гликоля легко с помощью тестирования теплоносителя на месте.
Скорректировать концентрацию гликоля легко с помощью тестирования теплоносителя на месте.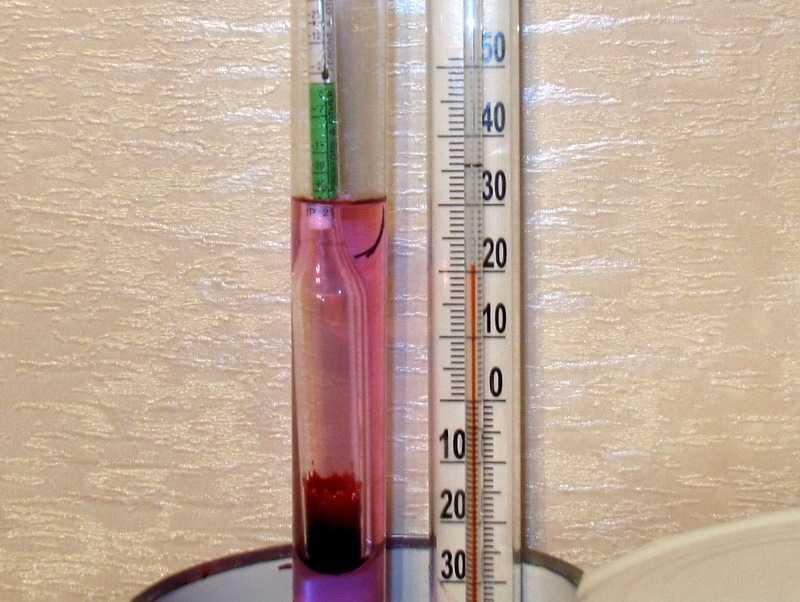 Наш калькулятор коррекции концентрации позволяет легко определить, сколько гликоля необходимо (концентрация 100 %), чтобы довести раствор до требуемых уровней. Посмотреть наши гликоли, доступные для покупки онлайн, можно здесь.
Наш калькулятор коррекции концентрации позволяет легко определить, сколько гликоля необходимо (концентрация 100 %), чтобы довести раствор до требуемых уровней. Посмотреть наши гликоли, доступные для покупки онлайн, можно здесь.

 Вы не можете удалять или скрывать
уведомление об авторских правах или другое уведомление, содержащееся в Продукте или Документах ASTM.
Вы не можете удалять или скрывать
уведомление об авторских правах или другое уведомление, содержащееся в Продукте или Документах ASTM.
 То есть Лицензиат может получить доступ к электронному файлу Документа (или его части) и загрузить его.
Документа) для временного хранения на одном компьютере в целях просмотра и/или
печать одной копии документа для личного пользования. Ни электронный файл, ни
единственный печатный отпечаток может быть воспроизведен в любом случае. Кроме того, электронный
файл не может распространяться где-либо еще по компьютерным сетям или иным образом. Это
электронный файл нельзя отправить по электронной почте, загрузить на диск, скопировать на другой жесткий диск или
в противном случае разделены. Одна печатная копия может быть распространена среди других только для их
внутреннее использование в вашей организации; его нельзя копировать. Индивидуальный загруженный документ
иным образом не может быть продана или перепродана, сдана в аренду, сдана в аренду, одолжена или сублицензирована.
То есть Лицензиат может получить доступ к электронному файлу Документа (или его части) и загрузить его.
Документа) для временного хранения на одном компьютере в целях просмотра и/или
печать одной копии документа для личного пользования. Ни электронный файл, ни
единственный печатный отпечаток может быть воспроизведен в любом случае. Кроме того, электронный
файл не может распространяться где-либо еще по компьютерным сетям или иным образом. Это
электронный файл нельзя отправить по электронной почте, загрузить на диск, скопировать на другой жесткий диск или
в противном случае разделены. Одна печатная копия может быть распространена среди других только для их
внутреннее использование в вашей организации; его нельзя копировать. Индивидуальный загруженный документ
иным образом не может быть продана или перепродана, сдана в аренду, сдана в аренду, одолжена или сублицензирована.

 получено из любого продукта или документа ASTM; (e) взимать плату за копию (электронную или
иным образом) любого стандарта, статьи, файла или материала, полученного из любого продукта ASTM или
Документ, за исключением обычных расходов на печать/копирование, если такое воспроизведение разрешено
по разделу 3; или (f) систематически загружать, архивировать или централизованно хранить существенные
части стандартов, статей, файлов или материалов, полученных из любого продукта ASTM или
Документ. Включение печатных или электронных копий в пакеты курсов или электронные резервы,
или для использования в дистанционном обучении, не разрешено настоящей Лицензией и запрещено без
Предварительное письменное разрешение ASTM.
получено из любого продукта или документа ASTM; (e) взимать плату за копию (электронную или
иным образом) любого стандарта, статьи, файла или материала, полученного из любого продукта ASTM или
Документ, за исключением обычных расходов на печать/копирование, если такое воспроизведение разрешено
по разделу 3; или (f) систематически загружать, архивировать или централизованно хранить существенные
части стандартов, статей, файлов или материалов, полученных из любого продукта ASTM или
Документ. Включение печатных или электронных копий в пакеты курсов или электронные резервы,
или для использования в дистанционном обучении, не разрешено настоящей Лицензией и запрещено без
Предварительное письменное разрешение ASTM.

 вред. Если подписка Лицензиата на Продукт ASTM прекращается, дальнейший доступ к
онлайн-база данных будет отклонена. Если Лицензиат или Авторизованные пользователи существенно нарушают
настоящую Лицензию или запрещать использование материалов в любом продукте ASTM, ASTM оставляет за собой право
право отказать Лицензиату в любом доступе к Продукту ASTM по собственному усмотрению ASTM.
вред. Если подписка Лицензиата на Продукт ASTM прекращается, дальнейший доступ к
онлайн-база данных будет отклонена. Если Лицензиат или Авторизованные пользователи существенно нарушают
настоящую Лицензию или запрещать использование материалов в любом продукте ASTM, ASTM оставляет за собой право
право отказать Лицензиату в любом доступе к Продукту ASTM по собственному усмотрению ASTM.

 соглашение, для проверки использования Лицензиатом Продукта и/или Документов ASTM. Лицензиат соглашается
разрешить доступ к своей информации и компьютерным системам для этой цели. Проверка
состоится после уведомления не менее чем за 15 дней, в обычные рабочие часы и в
таким образом, чтобы не создавать необоснованного вмешательства в деятельность Лицензиата. Если
проверка выявляет нелицензионное или запрещенное использование продуктов или документов ASTM,
Лицензиат соглашается возместить ASTM расходы, понесенные при проверке и возмещении
ASTM для любого нелицензированного/запрещенного использования. Применяя эту процедуру, ASTM не отказывается от
любое из своих прав на обеспечение соблюдения настоящего Соглашения или на защиту своей интеллектуальной собственности путем
любым другим способом, разрешенным законом.
соглашение, для проверки использования Лицензиатом Продукта и/или Документов ASTM. Лицензиат соглашается
разрешить доступ к своей информации и компьютерным системам для этой цели. Проверка
состоится после уведомления не менее чем за 15 дней, в обычные рабочие часы и в
таким образом, чтобы не создавать необоснованного вмешательства в деятельность Лицензиата. Если
проверка выявляет нелицензионное или запрещенное использование продуктов или документов ASTM,
Лицензиат соглашается возместить ASTM расходы, понесенные при проверке и возмещении
ASTM для любого нелицензированного/запрещенного использования. Применяя эту процедуру, ASTM не отказывается от
любое из своих прав на обеспечение соблюдения настоящего Соглашения или на защиту своей интеллектуальной собственности путем
любым другим способом, разрешенным законом. Лицензиат признает и соглашается с тем, что ASTM может внедрять
определенная идентифицирующая или отслеживающая информация в продуктах ASTM, доступных на Портале.
Лицензиат признает и соглашается с тем, что ASTM может внедрять
определенная идентифицирующая или отслеживающая информация в продуктах ASTM, доступных на Портале.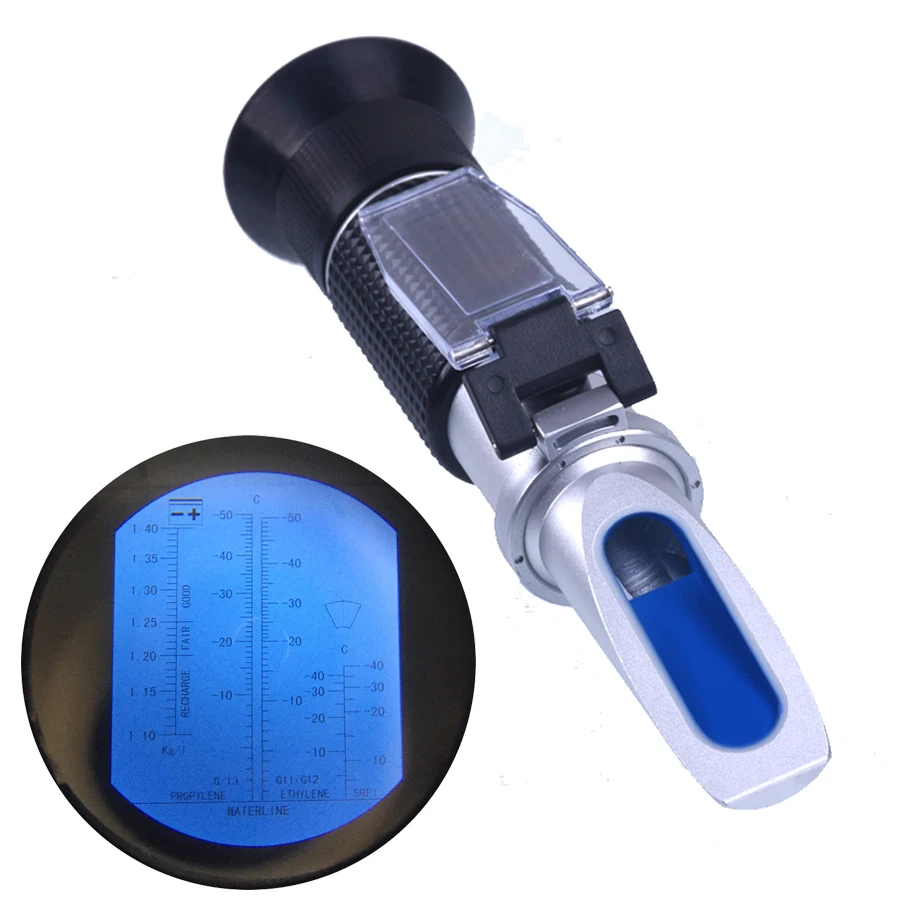


 Мы гарантируем высокое качество использованных пленок и проведения работ.
Мы гарантируем высокое качество использованных пленок и проведения работ.



 Сухой способ позволяет произвести оклейку более качественно. Но мокрый способ является более легким. Если вы решили клеить мокрым способом, используйте слабый раствор мыла и воды.
Сухой способ позволяет произвести оклейку более качественно. Но мокрый способ является более легким. Если вы решили клеить мокрым способом, используйте слабый раствор мыла и воды.
 К упаковке лака прилагается инструкция и в инструкции советуют, какое количество слоев нужно наносить.
К упаковке лака прилагается инструкция и в инструкции советуют, какое количество слоев нужно наносить. Кроме того, тонировка поставляется либо в рулонах, либо в предварительно нарезанных плоских листах, разработанных в соответствии с моделью каждого конкретного автомобиля, что также легко наносится. Однако каковы принятые правила использования тонировки фар?
Кроме того, тонировка поставляется либо в рулонах, либо в предварительно нарезанных плоских листах, разработанных в соответствии с моделью каждого конкретного автомобиля, что также легко наносится. Однако каковы принятые правила использования тонировки фар? В любом случае более светлые или тонкие оттенки практически не влияют на силу или яркость ваших фар. Факт, который противоречит тому, что происходит, если у вас более темный оттенок фар. Поэтому, если вам нужно тонировать фары, всегда следите за тем, чтобы вы применяли только более светлые фары, ради видимости и безопасности, особенно при вождении ночью или в плохих погодных условиях.
В любом случае более светлые или тонкие оттенки практически не влияют на силу или яркость ваших фар. Факт, который противоречит тому, что происходит, если у вас более темный оттенок фар. Поэтому, если вам нужно тонировать фары, всегда следите за тем, чтобы вы применяли только более светлые фары, ради видимости и безопасности, особенно при вождении ночью или в плохих погодных условиях.
 Вы сделаете правильно, если спросите власти, заинтересованные в этом вопросе.
Вы сделаете правильно, если спросите власти, заинтересованные в этом вопросе.


 Во-первых, приложите тепло, чтобы расплавить клей, или вы даже можете снять слой краски с помощью нашатырного спирта или мыльной воды. Для этого следует сначала нанести на фары спрей от насекомых, который устранит как пожелтение, так и помутнение. Многие люди предпочитают использовать ДЭТА, очень мощное химическое вещество, которое может легко снять любой мутный слой, тем самым сделав ваши фары ярче, чем когда-либо.
Во-первых, приложите тепло, чтобы расплавить клей, или вы даже можете снять слой краски с помощью нашатырного спирта или мыльной воды. Для этого следует сначала нанести на фары спрей от насекомых, который устранит как пожелтение, так и помутнение. Многие люди предпочитают использовать ДЭТА, очень мощное химическое вещество, которое может легко снять любой мутный слой, тем самым сделав ваши фары ярче, чем когда-либо.
 Если вы покупаете товар через любой из них, я МОГУ заработать комиссию без каких-либо дополнительных затрат для вас.
Если вы покупаете товар через любой из них, я МОГУ заработать комиссию без каких-либо дополнительных затрат для вас. В среднем вы можете заплатить от 50 до 200 долларов за профессиональную тонировку фар. Однако, если вы решите сделать тонировку самостоятельно, вы можете сэкономить много денег. Наборы для тонировки своими руками можно найти в Интернете примерно за 20 долларов.
В среднем вы можете заплатить от 50 до 200 долларов за профессиональную тонировку фар. Однако, если вы решите сделать тонировку самостоятельно, вы можете сэкономить много денег. Наборы для тонировки своими руками можно найти в Интернете примерно за 20 долларов.
 Краткая история Chevrolet Silverado
Автомобили
Краткая история Chevrolet Silverado
Автомобили
 Обращаться к администрации.
Обращаться к администрации. В опросе принимали участие около 3 тысяч владельцев 15 моделей кроссоверов с бензиновыми двигателями, доступных на российском авторынке. Самым экономичным оказался кроссовер Mazda CX-5, набравший 80,7 баллов из 100 возможных. Базовый 2,0-литровый двигатель имеет расход 6,8 л/100 км в смешанном цикле. «Серебро» у Toyota RAV4 (6,7 л/100 км), средняя оценка которого составила 68,3 балла. Третью и четвертую строчку заняли Subaru Forester (7,2 л/100 км) и Nissan Qashqai (7,3 л/100 км), набравшие 67,5 баллов. Замыкает пятерку, заработав 65,8 баллов, Honda CR-V с 2,0-литровым 150-сильным мотором (7,5 л/100 км).
В опросе принимали участие около 3 тысяч владельцев 15 моделей кроссоверов с бензиновыми двигателями, доступных на российском авторынке. Самым экономичным оказался кроссовер Mazda CX-5, набравший 80,7 баллов из 100 возможных. Базовый 2,0-литровый двигатель имеет расход 6,8 л/100 км в смешанном цикле. «Серебро» у Toyota RAV4 (6,7 л/100 км), средняя оценка которого составила 68,3 балла. Третью и четвертую строчку заняли Subaru Forester (7,2 л/100 км) и Nissan Qashqai (7,3 л/100 км), набравшие 67,5 баллов. Замыкает пятерку, заработав 65,8 баллов, Honda CR-V с 2,0-литровым 150-сильным мотором (7,5 л/100 км). ru Blogger Linkedin Liveinternet Livejournal Facebook Twitter Reddit Pinterest Tumblr WhatsApp
Telegram
Viber
Skype Электронная почта Ссылка
ru Blogger Linkedin Liveinternet Livejournal Facebook Twitter Reddit Pinterest Tumblr WhatsApp
Telegram
Viber
Skype Электронная почта Ссылка после потери взлетно-посадочной полосы в Гостомеле украинские военные передислоцировали три пусковые установки «Бук-М1» для усиления обороны аэропорта Жуляны
после потери взлетно-посадочной полосы в Гостомеле украинские военные передислоцировали три пусковые установки «Бук-М1» для усиления обороны аэропорта Жуляны также предпринимали недружественные действия против России в экономической сфере
также предпринимали недружественные действия против России в экономической сфере


 «Мы не называем имя этого партнера».
«Мы не называем имя этого партнера».

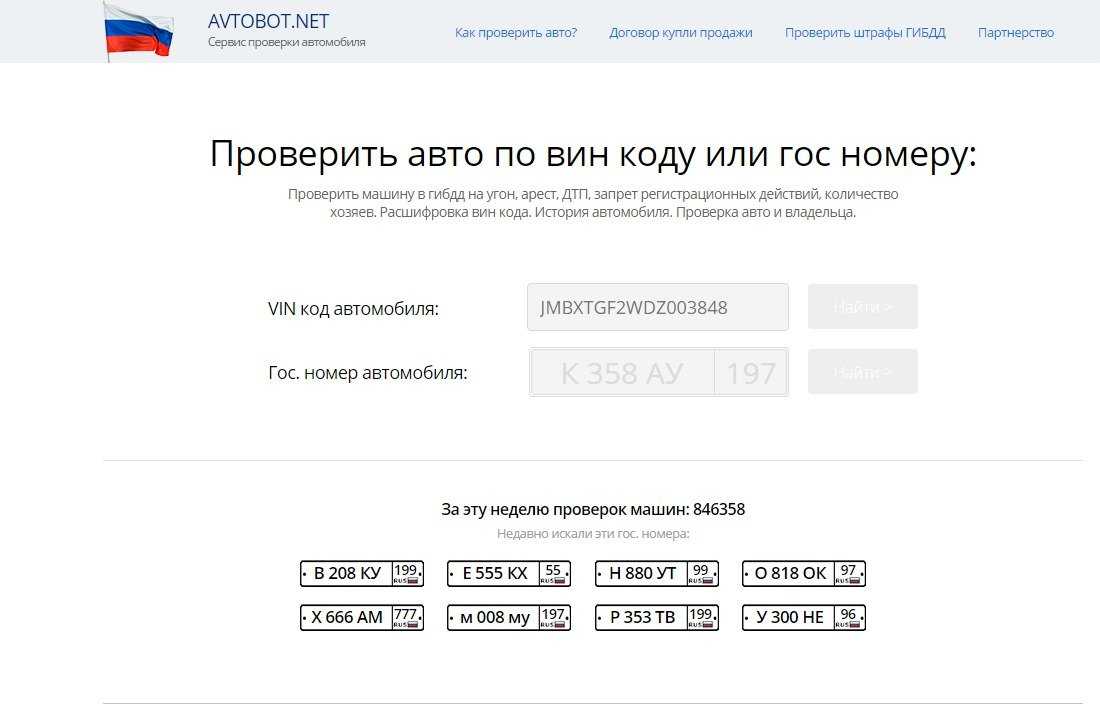
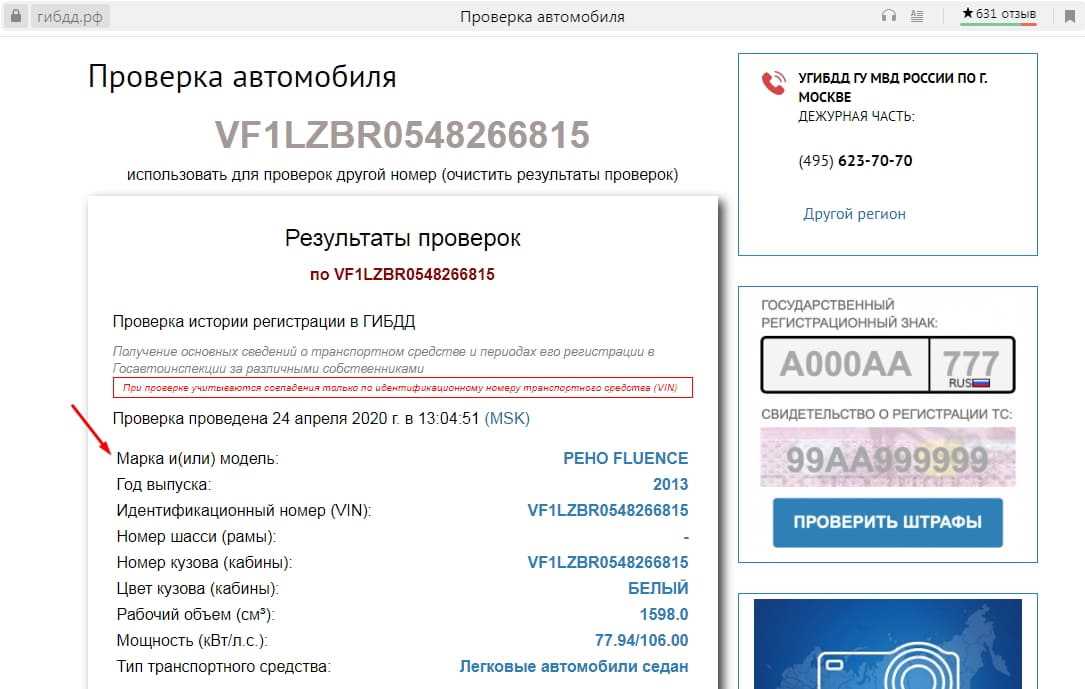
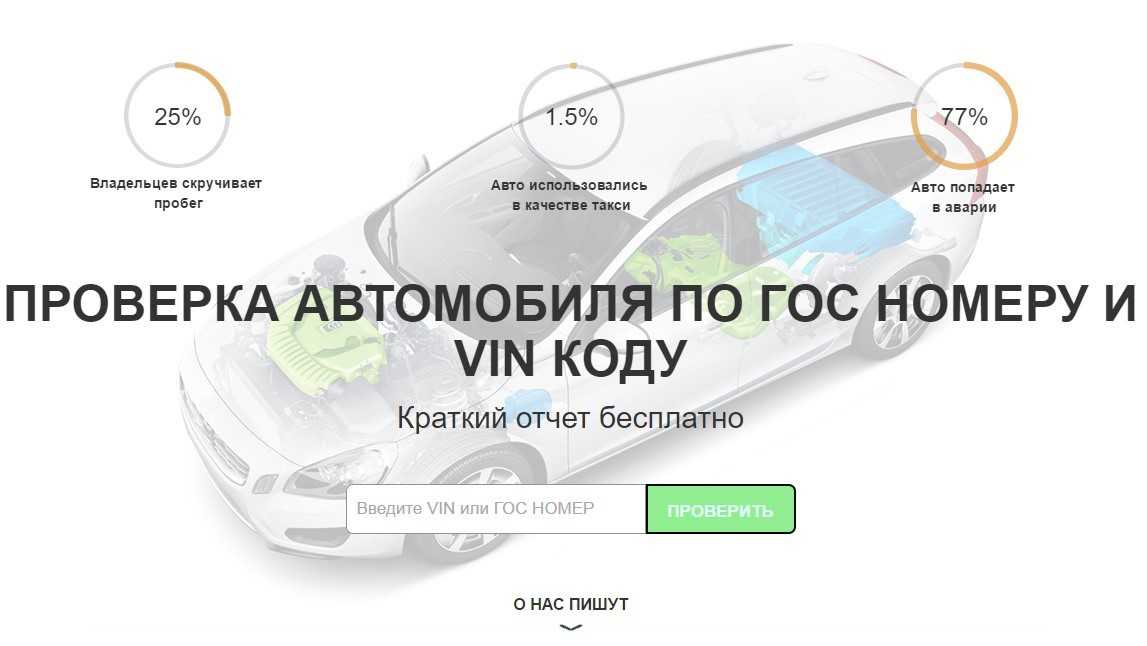
 Для этого достаточно указать госномер транспортного средства. В течение 5 минут система сформирует отчет с подробной информацией об автомобиле.
Для этого достаточно указать госномер транспортного средства. В течение 5 минут система сформирует отчет с подробной информацией об автомобиле. 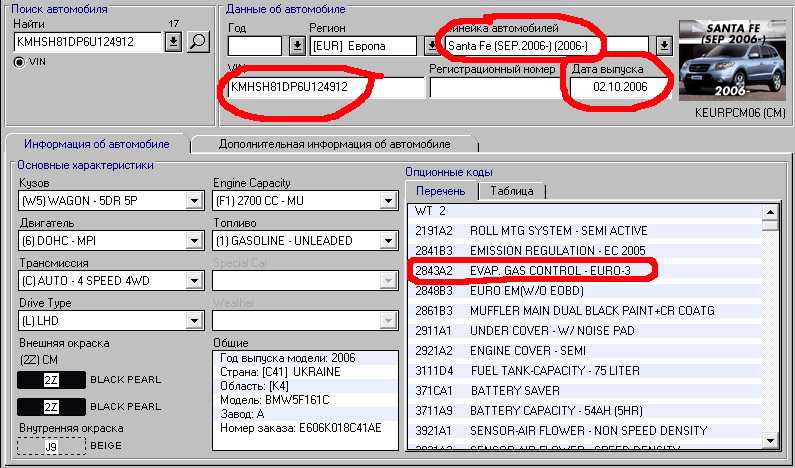 номеру?
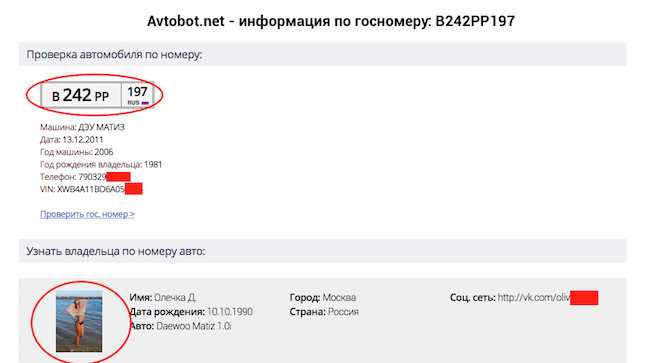
номеру? Если машины была где-то засвечена, то в поиске будет предоставлены ссылки на ресурс, на котором можно найти номер телефона и другие данные автовладельца.
Если машины была где-то засвечена, то в поиске будет предоставлены ссылки на ресурс, на котором можно найти номер телефона и другие данные автовладельца. Адекватный человек сразу выйдет на дорогу и не будет никуда уезжать. Но многие автовладельцы не хотят иметь дело с последствиями и просто уезжают. Если вы запомнили номера машины, то у вас есть отличный шанс найти и её хозяина.
Адекватный человек сразу выйдет на дорогу и не будет никуда уезжать. Но многие автовладельцы не хотят иметь дело с последствиями и просто уезжают. Если вы запомнили номера машины, то у вас есть отличный шанс найти и её хозяина. номеру. Если же в вас врезались, и водитель уехал с места преступления, то у вас есть возможность обратиться в правоохранительные органы. Они на законных основаниях пробьют по базе автомобиль и смогут вычислить нарушителя.
номеру. Если же в вас врезались, и водитель уехал с места преступления, то у вас есть возможность обратиться в правоохранительные органы. Они на законных основаниях пробьют по базе автомобиль и смогут вычислить нарушителя.
 По этому поиск телефона владельца по номеру авто считается незаконным и может быть наказуем.
По этому поиск телефона владельца по номеру авто считается незаконным и может быть наказуем.
 Но обязательно надо узнать реального владельца авто по государственному номеру, чтоб купить проверенный автомобиль. Комплексный подход позволит вам сделать хорошо продуманную покупку авто. Заказав отчет у независимых экспертов, вы можете быть уверены в покупке, сэкономить время и деньги. Это лучшее решение на 2023 год!
Но обязательно надо узнать реального владельца авто по государственному номеру, чтоб купить проверенный автомобиль. Комплексный подход позволит вам сделать хорошо продуманную покупку авто. Заказав отчет у независимых экспертов, вы можете быть уверены в покупке, сэкономить время и деньги. Это лучшее решение на 2023 год! Иногда могут быть и недостатки в комплектации — например мятая обивка или царапины на пластике, что выглядит не очень эстетично.Так же может быть автомобиль с дефектами покраски — царапины и царапины, или наоборот — с двойным лакокрасочным покрытием который пытается скрыть недостатки автомобиля. Имеются также повреждения фар и ходовой части, возникшие при транспортировке автомобилей от производителя до места продажи.
Иногда могут быть и недостатки в комплектации — например мятая обивка или царапины на пластике, что выглядит не очень эстетично.Так же может быть автомобиль с дефектами покраски — царапины и царапины, или наоборот — с двойным лакокрасочным покрытием который пытается скрыть недостатки автомобиля. Имеются также повреждения фар и ходовой части, возникшие при транспортировке автомобилей от производителя до места продажи. Получите достоверные и максимально полные данные о автомобиле. Гарантия возмещения ущерба! Предоставляют полный отчет по истории владения и эксплуатации! Официальные данные.
Получите достоверные и максимально полные данные о автомобиле. Гарантия возмещения ущерба! Предоставляют полный отчет по истории владения и эксплуатации! Официальные данные. Это значительно упростило
процесс поиска информациио о машинах по номерам, ведь теперь, каждый может полагаться не только
на муниципальные учреждения, личные «связи» и «сарафанное радио», но и на множество
информационных интернет – сервисов.
Это значительно упростило
процесс поиска информациио о машинах по номерам, ведь теперь, каждый может полагаться не только
на муниципальные учреждения, личные «связи» и «сарафанное радио», но и на множество
информационных интернет – сервисов.



 Это позволяет сориентироваться и принять верное решение, касаемо
интересующего автомобиля.
Это позволяет сориентироваться и принять верное решение, касаемо
интересующего автомобиля.
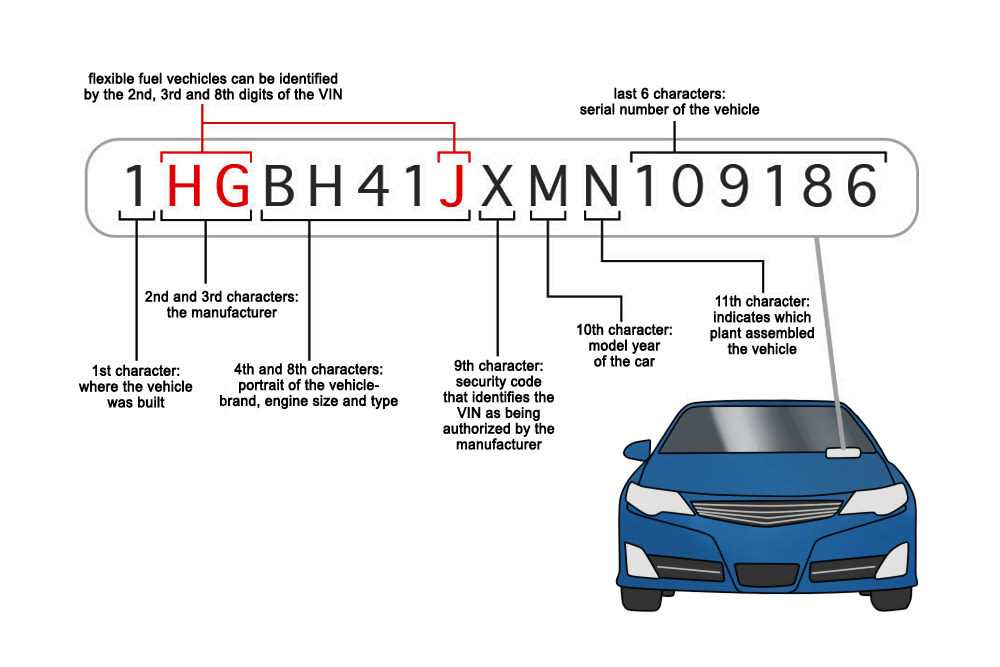
 Когда у вас есть автомобиль, вы получаете доступ к информации, которой раньше не было. Большинство автомобилей имеют идентификационный номер транспортного средства (VIN), который может помочь вам узнать историю автомобиля и его владельца. В этой статье будет все подробно для тех, кто хочет знать, как найти зарегистрированного владельца транспортного средства по номеру VIN бесплатно.
Когда у вас есть автомобиль, вы получаете доступ к информации, которой раньше не было. Большинство автомобилей имеют идентификационный номер транспортного средства (VIN), который может помочь вам узнать историю автомобиля и его владельца. В этой статье будет все подробно для тех, кто хочет знать, как найти зарегистрированного владельца транспортного средства по номеру VIN бесплатно.
 Обычно он расположен на приборной панели со стороны водителя или на стойке двери водителя. Получив VIN, введите его на сайте выбранной вами компании и оплатите отчет. Через несколько минут у вас будет подробный отчет об истории автомобиля, который поможет вам решить, покупать его или нет.
Обычно он расположен на приборной панели со стороны водителя или на стойке двери водителя. Получив VIN, введите его на сайте выбранной вами компании и оплатите отчет. Через несколько минут у вас будет подробный отчет об истории автомобиля, который поможет вам решить, покупать его или нет. Девятая цифра — код безопасности, предотвращающий кражу автомобиля. Последние восемь цифр — это идентификационный номер автомобиля, который содержит информацию о конкретном автомобиле, такую как объем двигателя и год выпуска.
Девятая цифра — код безопасности, предотвращающий кражу автомобиля. Последние восемь цифр — это идентификационный номер автомобиля, который содержит информацию о конкретном автомобиле, такую как объем двигателя и год выпуска. Одним из способов является проверка в Департаменте транспортных средств (DMV) в штате, где зарегистрирован автомобиль. Вы также можете обратиться в правоохранительные органы в юрисдикции, где в настоящее время находится транспортное средство. Наконец, вы можете использовать службу онлайн-поиска, такую как CarFax или AutoCheck.
Одним из способов является проверка в Департаменте транспортных средств (DMV) в штате, где зарегистрирован автомобиль. Вы также можете обратиться в правоохранительные органы в юрисдикции, где в настоящее время находится транспортное средство. Наконец, вы можете использовать службу онлайн-поиска, такую как CarFax или AutoCheck.
 Некоторые наклейки расположены на косяках дверей со стороны водителя или краях приборной панели со стороны пассажира возле краев ветрового стекла; Страны с левосторонним управлением обычно находят VIN на блоках цилиндров.
Некоторые наклейки расположены на косяках дверей со стороны водителя или краях приборной панели со стороны пассажира возле краев ветрового стекла; Страны с левосторонним управлением обычно находят VIN на блоках цилиндров. Мы надеемся, что наше руководство было полезным и дало вам представление о том, какие шаги необходимо предпринять, чтобы определить, кто является владельцем автомобиля, используя его VIN-номер. Удачи!
Мы надеемся, что наше руководство было полезным и дало вам представление о том, какие шаги необходимо предпринять, чтобы определить, кто является владельцем автомобиля, используя его VIN-номер. Удачи! Следующие пять цифр описывают автомобиль, двигатель, трансмиссию и другие технические характеристики. Следующие три цифры содержат код безопасности автомобиля, год выпуска и местонахождение сборочного завода. Наконец, последние шесть цифр являются серийным номером вашего автомобиля и определяют уровень отделки салона вашего автомобиля и другие характеристики.
Следующие пять цифр описывают автомобиль, двигатель, трансмиссию и другие технические характеристики. Следующие три цифры содержат код безопасности автомобиля, год выпуска и местонахождение сборочного завода. Наконец, последние шесть цифр являются серийным номером вашего автомобиля и определяют уровень отделки салона вашего автомобиля и другие характеристики. В каждом штате есть собственный метод запроса информации, защищенной DPPA. Чтобы найти владельца транспортного средства, вы должны запросить эту информацию непосредственно в агентстве DMV и иметь для этого законную причину.
В каждом штате есть собственный метод запроса информации, защищенной DPPA. Чтобы найти владельца транспортного средства, вы должны запросить эту информацию непосредственно в агентстве DMV и иметь для этого законную причину.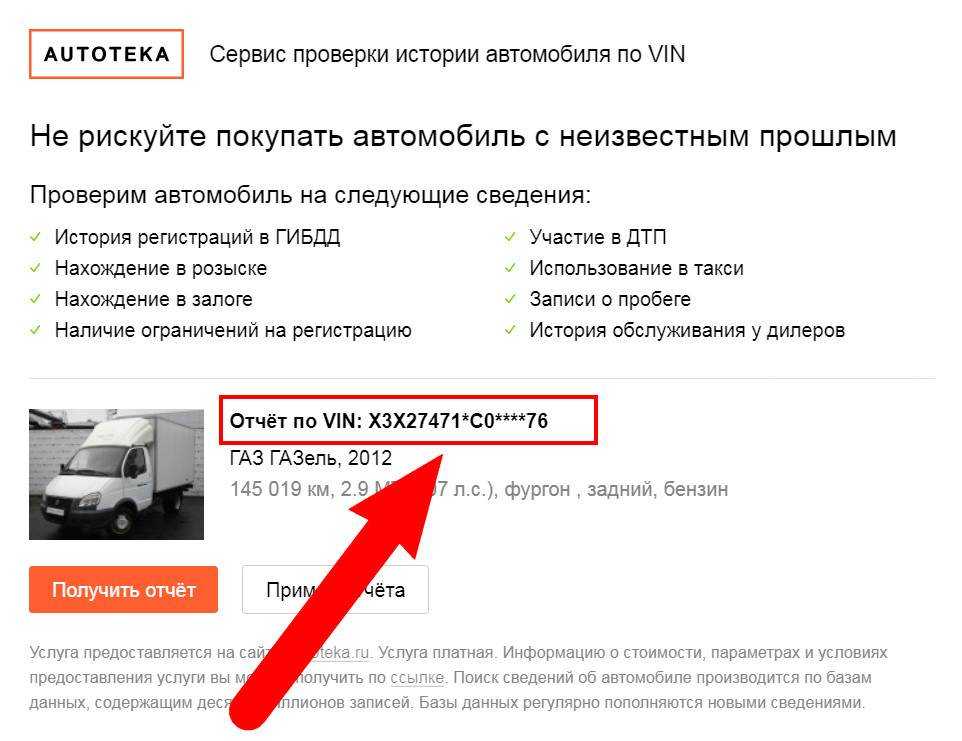
 1 кг
1 кг


 объема образующихся при последующей нейтрализации твердых осадков, поскольку на 1 массовую часть осадка гидроокиси хрома дополнительно образуется 3,12 массовых частей осадка гидроксида железа (III).
объема образующихся при последующей нейтрализации твердых осадков, поскольку на 1 массовую часть осадка гидроокиси хрома дополнительно образуется 3,12 массовых частей осадка гидроксида железа (III). При обработке стоков на установках непрерывного действия полезную емкость реактора рекомендуется принимать равной 30-ти минутному расчетному расходу.
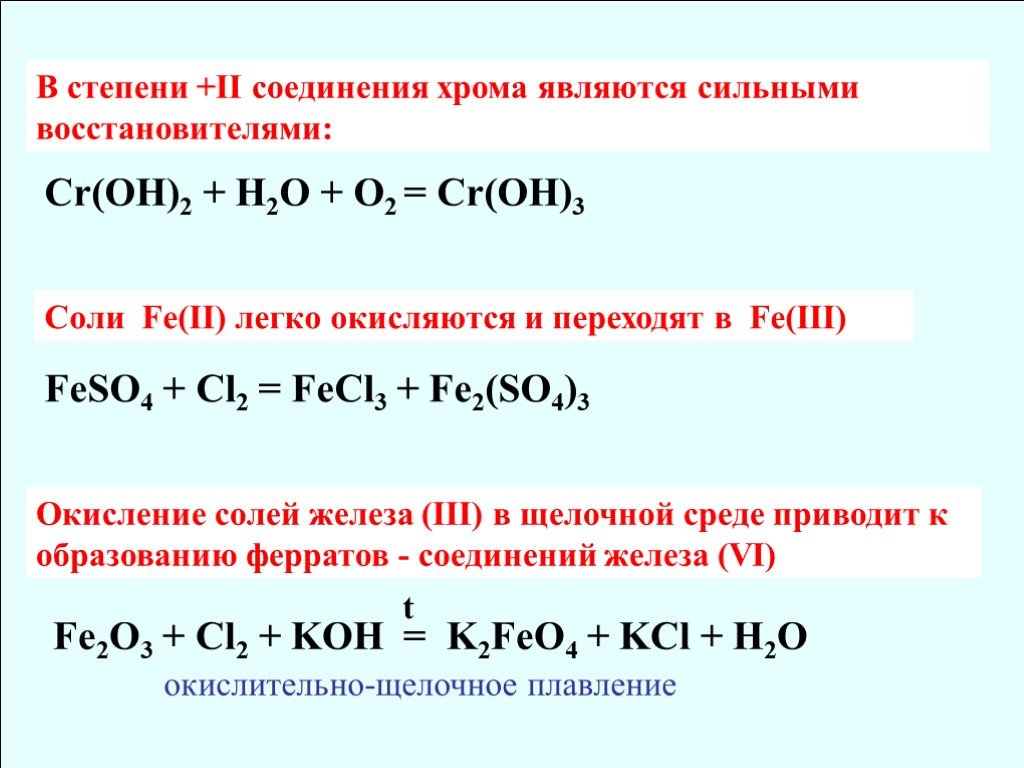
При обработке стоков на установках непрерывного действия полезную емкость реактора рекомендуется принимать равной 30-ти минутному расчетному расходу. При pH >12 амфотерная гидроокись Сг3+ в избытке щелочи образует растворимые хромиты:
При pH >12 амфотерная гидроокись Сг3+ в избытке щелочи образует растворимые хромиты: Даже когда нуль не достигается (например, цемент LS), исходное значение сохраняется без увеличения с течением времени, в отличие от хорошо известной ситуации, обычно происходящей с другими восстановителями (например, сульфатом железа или сульфатом олова).
Даже когда нуль не достигается (например, цемент LS), исходное значение сохраняется без увеличения с течением времени, в отличие от хорошо известной ситуации, обычно происходящей с другими восстановителями (например, сульфатом железа или сульфатом олова).
 Причина может заключаться в том, что олово (II) обладает сильными кислотными свойствами и при помоле цемента может реагировать со свободной известью и водой, частично превращаясь в гидроксид двухвалентного олова, как и в случае сульфата железа.
Причина может заключаться в том, что олово (II) обладает сильными кислотными свойствами и при помоле цемента может реагировать со свободной известью и водой, частично превращаясь в гидроксид двухвалентного олова, как и в случае сульфата железа.




 Минск, Октябрьский р-н, ул.Володько, 30.
Минск, Октябрьский р-н, ул.Володько, 30. Тем не менее, они могут быть настоящей болью для очистки.
Тем не менее, они могут быть настоящей болью для очистки. )
) Вот как убрать пригоревший беспорядок, не поцарапав и не повредив стеклянную плиту.
Вот как убрать пригоревший беспорядок, не поцарапав и не повредив стеклянную плиту.


 Направьте свой дух «сделай сам» с помощью этих полезных советов по очистке, чтобы ваша стеклянная плита оставалась в первозданном виде неделю за неделей.
Направьте свой дух «сделай сам» с помощью этих полезных советов по очистке, чтобы ваша стеклянная плита оставалась в первозданном виде неделю за неделей. Этот метод избавит от любых брызг пищи и облегчит последующую очистку.
Этот метод избавит от любых брызг пищи и облегчит последующую очистку. Чистящее средство, такое как Power Paste, может избавиться от налета и отполировать поверхность стеклянной плиты. В противном случае используйте обычные чистящие средства, такие как пищевая сода и белый уксус. «Обычно люди думают, что моющее средство имеет наибольшее значение, но не менее важны инструменты, с которыми вы работаете, потому что они работают вместе», — говорит Кананен. Имейте в виду, что с лишней грязью и стойкими пятнами придется столкнуться с каким-то скребком или лезвием бритвы.
Чистящее средство, такое как Power Paste, может избавиться от налета и отполировать поверхность стеклянной плиты. В противном случае используйте обычные чистящие средства, такие как пищевая сода и белый уксус. «Обычно люди думают, что моющее средство имеет наибольшее значение, но не менее важны инструменты, с которыми вы работаете, потому что они работают вместе», — говорит Кананен. Имейте в виду, что с лишней грязью и стойкими пятнами придется столкнуться с каким-то скребком или лезвием бритвы. Clean MagicEraser за их мастерство, когда дело доходит до избавления от грязи. Вам также понадобятся аэрозольные баллончики, скребки, губки для мытья посуды и мягкие тряпки.
Clean MagicEraser за их мастерство, когда дело доходит до избавления от грязи. Вам также понадобятся аэрозольные баллончики, скребки, губки для мытья посуды и мягкие тряпки.


 Двигатели, используемые в автомобилях этой модели, обладают высокой мощностью и часто подвергаются значительным нагрузкам, особенно при движении по бездорожью, на пересеченной местности, в городских пробках и др.
Двигатели, используемые в автомобилях этой модели, обладают высокой мощностью и часто подвергаются значительным нагрузкам, особенно при движении по бездорожью, на пересеченной местности, в городских пробках и др.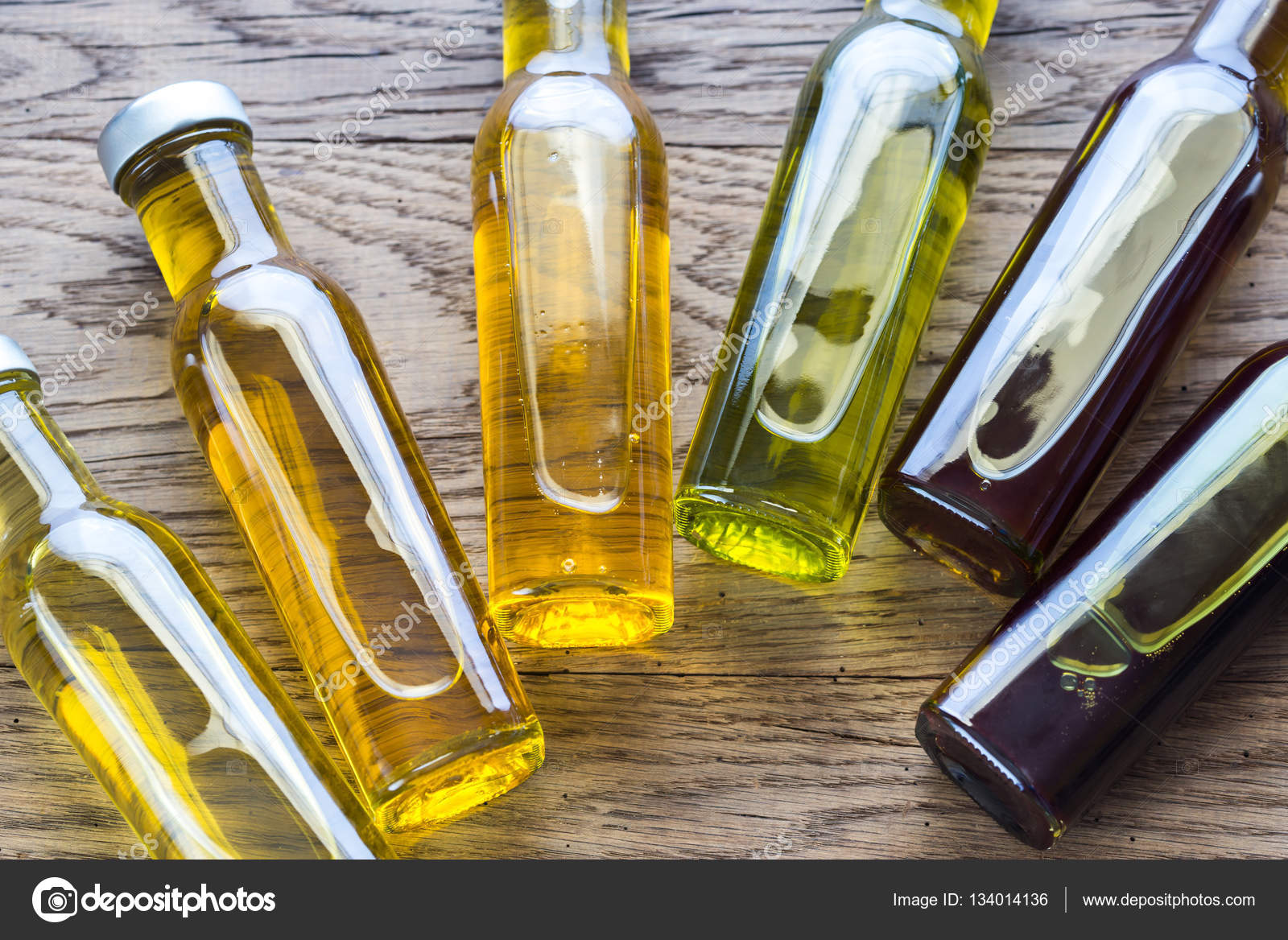 При выборе масел важно учитывать репутацию их производителя, доступность на рынке и качество. О нем говорят данные независимых испытаний, участие в которых для производителей ГСМ большой риск. На него идут те, кто полностью уверен в качестве выпускаемой продукции.
При выборе масел важно учитывать репутацию их производителя, доступность на рынке и качество. О нем говорят данные независимых испытаний, участие в которых для производителей ГСМ большой риск. На него идут те, кто полностью уверен в качестве выпускаемой продукции. Масла являются богатым источником питательных веществ, жирных кислот и антиоксидантов. Они проникают в дерму намного глубже, обычного крема, делают кожу гладкой, упругой и нежной.
Масла являются богатым источником питательных веществ, жирных кислот и антиоксидантов. Они проникают в дерму намного глубже, обычного крема, делают кожу гладкой, упругой и нежной.  Ночью, когда мышцы лица расслаблены, кожа подобно губке, впитывает в себя все ценные компоненты косметики. За ночь масло очень интенсивно напитает кожу, а утром после умывания вы почувствуете насколько она бархатистая, гладкая и увлажнённая. Обратите внимание, что это всего лишь совет. Если вам комфортно с маслом на лице в течение дня, то это совершенно не запрещено, пользуйтесь на благо красоты и здоровья вашей кожи!
Ночью, когда мышцы лица расслаблены, кожа подобно губке, впитывает в себя все ценные компоненты косметики. За ночь масло очень интенсивно напитает кожу, а утром после умывания вы почувствуете насколько она бархатистая, гладкая и увлажнённая. Обратите внимание, что это всего лишь совет. Если вам комфортно с маслом на лице в течение дня, то это совершенно не запрещено, пользуйтесь на благо красоты и здоровья вашей кожи!

 В его состав входят комплекс из 6 натуральных масел. Они интенсивно питают и смягчают кожу, способствуя выравниванию микрорельефа кожи и уменьшению глубины морщин.
В его состав входят комплекс из 6 натуральных масел. Они интенсивно питают и смягчают кожу, способствуя выравниванию микрорельефа кожи и уменьшению глубины морщин.
 Когда дело доходит до воздействия на здоровье, все растительные масла неодинаковы. Для кулинарных масел лучшими являются масла с низкой скоростью окисления. Окисление происходит, когда масла подвергаются воздействию тепла, воздуха и света (в зависимости от масла). Разные масла имеют разный уровень стабильности. Чем более стабильно масло, тем менее легко оно начинает прогоркать в результате окисления. Окисление способствует образованию свободных радикалов, химических веществ, обладающих высокой реакционной способностью и потенциально способных повредить клетки, в том числе повреждения, которые могут привести к раку.
Когда дело доходит до воздействия на здоровье, все растительные масла неодинаковы. Для кулинарных масел лучшими являются масла с низкой скоростью окисления. Окисление происходит, когда масла подвергаются воздействию тепла, воздуха и света (в зависимости от масла). Разные масла имеют разный уровень стабильности. Чем более стабильно масло, тем менее легко оно начинает прогоркать в результате окисления. Окисление способствует образованию свободных радикалов, химических веществ, обладающих высокой реакционной способностью и потенциально способных повредить клетки, в том числе повреждения, которые могут привести к раку. Было показано, что некоторые остатки гексана могут оставаться в масле, и FDA не требует от производителей пищевых продуктов проверять наличие остатков. Остаточные тесты, проведенные Институтом Рога Изобилия в 2009 г.нашли остатки гексана в соевом масле. Таким образом, мы вполне могли бы есть это химическое вещество каждый раз, когда готовим на маслах, извлеченных из гексана. Почти все токсикологические исследования сосредоточены на промышленном использовании и вдыхании гексана, поэтому никто точно не знает, насколько опасно его употребление в пищу, но это, безусловно, не полезно для здоровья. Отжатое масло экспеллером означает, что масло было механически извлечено с помощью винтового пресса. Этот традиционный способ получения масла намного полезнее, чем использование растворителей, таких как гексан. Прессование экспеллером используется не так часто, потому что оно менее эффективно (то есть производители видят более низкий выход) и дороже. Процесс прессования шнековым прессом может вызвать много тепла, из-за которого масло может стать прогорклым (окисление), поэтому, чтобы сохранить качество масла, некоторые компании практикуют процесс холодного прессования и хранят свои масла при температуре от 80°F до 120°С.
Было показано, что некоторые остатки гексана могут оставаться в масле, и FDA не требует от производителей пищевых продуктов проверять наличие остатков. Остаточные тесты, проведенные Институтом Рога Изобилия в 2009 г.нашли остатки гексана в соевом масле. Таким образом, мы вполне могли бы есть это химическое вещество каждый раз, когда готовим на маслах, извлеченных из гексана. Почти все токсикологические исследования сосредоточены на промышленном использовании и вдыхании гексана, поэтому никто точно не знает, насколько опасно его употребление в пищу, но это, безусловно, не полезно для здоровья. Отжатое масло экспеллером означает, что масло было механически извлечено с помощью винтового пресса. Этот традиционный способ получения масла намного полезнее, чем использование растворителей, таких как гексан. Прессование экспеллером используется не так часто, потому что оно менее эффективно (то есть производители видят более низкий выход) и дороже. Процесс прессования шнековым прессом может вызвать много тепла, из-за которого масло может стать прогорклым (окисление), поэтому, чтобы сохранить качество масла, некоторые компании практикуют процесс холодного прессования и хранят свои масла при температуре от 80°F до 120°С. °F. Этот процесс более трудоемкий, но в результате получается более качественное и полезное для здоровья масло.
°F. Этот процесс более трудоемкий, но в результате получается более качественное и полезное для здоровья масло. Все, кроме кунжутного масла, содержат большинство мононенасыщенных жирных кислот.
Все, кроме кунжутного масла, содержат большинство мононенасыщенных жирных кислот. Масла с преобладанием ПНЖК никогда не должны очищаться или обрабатываться, и, к сожалению, найти действительно необработанные версии этих масел может быть трудной задачей. Кукурузного и соевого масел лучше избегать из-за их генетически модифицированного статуса и высоких уровней пестицидов. Используйте масла, богатые омега-3, такие как льняное масло, экономно в домашних приправах, таких как заправки для салатов, майонез, свежеприготовленные коктейли или слегка поливайте супы, соусы, и закуски. Есть много противоречивых мнений о безопасности приготовления пищи на масле из виноградных косточек. Как и кунжутное масло, оно имеет более высокую точку дымления из-за содержания антиоксидантов. Тем не менее, масло из виноградных косточек очень богато ПНЖК и не должно использоваться для приготовления пищи.
Масла с преобладанием ПНЖК никогда не должны очищаться или обрабатываться, и, к сожалению, найти действительно необработанные версии этих масел может быть трудной задачей. Кукурузного и соевого масел лучше избегать из-за их генетически модифицированного статуса и высоких уровней пестицидов. Используйте масла, богатые омега-3, такие как льняное масло, экономно в домашних приправах, таких как заправки для салатов, майонез, свежеприготовленные коктейли или слегка поливайте супы, соусы, и закуски. Есть много противоречивых мнений о безопасности приготовления пищи на масле из виноградных косточек. Как и кунжутное масло, оно имеет более высокую точку дымления из-за содержания антиоксидантов. Тем не менее, масло из виноградных косточек очень богато ПНЖК и не должно использоваться для приготовления пищи. Они широко используются, потому что они недороги и имеют длительный срок годности. Они не имеют никакой пользы для здоровья и фактически причиняют телесные повреждения.
Они широко используются, потому что они недороги и имеют длительный срок годности. Они не имеют никакой пользы для здоровья и фактически причиняют телесные повреждения. Исследования также обнаружили некоторые трансжиры в масле канолы, которые были созданы в ходе тяжелой обработки, через которую оно проходит. Эти транс-жиры не маркируются. Это иронично, потому что транс-жиры не полезны для сердца! По данным Weston A. Price Foundation: «Как и все современные растительные масла, масло канолы проходит процесс каустической очистки, отбеливания и рафинирования — все это связано с высокими температурами или химическими веществами сомнительной безопасности. А поскольку масло канолы богато омега-3 жирными кислотами, которые легко прогоркают и имеют неприятный запах при воздействии кислорода и высоких температур, его необходимо дезодорировать. Стандартный процесс дезодорации удаляет большую часть омега-3 жирных кислот, превращая их в трансжирные кислоты… исследования, проведенные в Университете Флориды в Гейнсвилле, показали, что уровень транс-жиров достигает 4,6% в коммерческом жидком масле… они не указаны в наклейка». Торговые марки Mazola и Crisco признают, что используют ГМО и экстракцию гексаном в своей обработке.
Исследования также обнаружили некоторые трансжиры в масле канолы, которые были созданы в ходе тяжелой обработки, через которую оно проходит. Эти транс-жиры не маркируются. Это иронично, потому что транс-жиры не полезны для сердца! По данным Weston A. Price Foundation: «Как и все современные растительные масла, масло канолы проходит процесс каустической очистки, отбеливания и рафинирования — все это связано с высокими температурами или химическими веществами сомнительной безопасности. А поскольку масло канолы богато омега-3 жирными кислотами, которые легко прогоркают и имеют неприятный запах при воздействии кислорода и высоких температур, его необходимо дезодорировать. Стандартный процесс дезодорации удаляет большую часть омега-3 жирных кислот, превращая их в трансжирные кислоты… исследования, проведенные в Университете Флориды в Гейнсвилле, показали, что уровень транс-жиров достигает 4,6% в коммерческом жидком масле… они не указаны в наклейка». Торговые марки Mazola и Crisco признают, что используют ГМО и экстракцию гексаном в своей обработке. Wesson Oil подтвердила, что используется ГМО-рапс. Примечание: бренд Spectrum Organics не использует гексан для обработки своего масла канолы, и, как и любое органическое масло, оно не содержит ГМО. Тем не менее, я не считаю рапсовое масло полезным для здоровья и вместо этого выбрал бы другой тип масла.
Wesson Oil подтвердила, что используется ГМО-рапс. Примечание: бренд Spectrum Organics не использует гексан для обработки своего масла канолы, и, как и любое органическое масло, оно не содержит ГМО. Тем не менее, я не считаю рапсовое масло полезным для здоровья и вместо этого выбрал бы другой тип масла. К счастью, большинство кулинарных масел в продуктовых магазинах больше не содержат хлопкового масла, и этот ингредиент в основном относится к переработанным пищевым продуктам. Хлопковое семя широко заменяют в растительных маслах другим маслом, которого следует избегать: соевым маслом.
К счастью, большинство кулинарных масел в продуктовых магазинах больше не содержат хлопкового масла, и этот ингредиент в основном относится к переработанным пищевым продуктам. Хлопковое семя широко заменяют в растительных маслах другим маслом, которого следует избегать: соевым маслом. Недавний опрос показал, что большинство американцев используют «Растительное масло Wesson», которое теперь производится из соевых бобов (ранее хлопкового). Торговая марка Wesson принадлежит компании Conagra Foods, которая пожертвовала более 2,6 миллионов долларов на борьбу с законами о маркировке ГМО в США, поэтому , каждый раз, когда вы покупаете их продукцию, вы помогаете финансировать эти кампании по борьбе с маркировкой. Кулинарное масло Smart Balance представляет собой соевое масло, смешанное с маслом канолы и оливковым маслом. Когда Food Babe связалась со Smart Balance для получения дополнительной информации об их продуктах и маркировке, им сказали: « мы планируем перевести всю нашу линейку продуктов на продукты, не содержащие ГМО, включая масло Smart Balance Oil. В настоящее время наше масло не подвергается экспеллерному прессованию и не содержит ГМО». и «Мы не знаем, используется ли конкретно гексан, но мы знаем, что это химический процесс» .
Недавний опрос показал, что большинство американцев используют «Растительное масло Wesson», которое теперь производится из соевых бобов (ранее хлопкового). Торговая марка Wesson принадлежит компании Conagra Foods, которая пожертвовала более 2,6 миллионов долларов на борьбу с законами о маркировке ГМО в США, поэтому , каждый раз, когда вы покупаете их продукцию, вы помогаете финансировать эти кампании по борьбе с маркировкой. Кулинарное масло Smart Balance представляет собой соевое масло, смешанное с маслом канолы и оливковым маслом. Когда Food Babe связалась со Smart Balance для получения дополнительной информации об их продуктах и маркировке, им сказали: « мы планируем перевести всю нашу линейку продуктов на продукты, не содержащие ГМО, включая масло Smart Balance Oil. В настоящее время наше масло не подвергается экспеллерному прессованию и не содержит ГМО». и «Мы не знаем, используется ли конкретно гексан, но мы знаем, что это химический процесс» . Сливочное масло – настоящая жемчужина питательных веществ, и наши предки ценили масло за его живительные питательные вещества! Сырой, необработанный жир от коров, питающихся травой, имеет комплексный профиль жирных кислот, который защищает его потребителя от развития дисбаланса, такого как затвердение артерий, кальцификация органов, желез и суставов (артрит) и катаракта. Качественное сырое масло содержит:
Сливочное масло – настоящая жемчужина питательных веществ, и наши предки ценили масло за его живительные питательные вещества! Сырой, необработанный жир от коров, питающихся травой, имеет комплексный профиль жирных кислот, который защищает его потребителя от развития дисбаланса, такого как затвердение артерий, кальцификация органов, желез и суставов (артрит) и катаракта. Качественное сырое масло содержит: Со всеми этими преимуществами для здоровья сырое органическое масло может быть диетическим жиром, потребляемым каждый день.
Со всеми этими преимуществами для здоровья сырое органическое масло может быть диетическим жиром, потребляемым каждый день. com и книга Салли Фэллон «Питательные традиции». Дополнительный витамин Е требуется в рационах, заменяющих молоко, которые содержат масло канолы.0035 TRANS ГЕОМЕТРИЧЕСКИЕ ИЗОМЕРЫ НЕЗАМЕНИМЫХ ЖИРНЫХ КИСЛОТ В НЕКОТОРЫХ НЕГИДРОГЕНИРОВАННЫХ РАСТИТЕЛЬНЫХ МАСЛАХ США Важность соотношения незаменимых жирных кислот омега-6/омега-3. Токсикологический профиль для n- HexaneU.S. население: Какие марки салатного или растительного масла вы использовали чаще всего за последние 90 дней? Растительные масла с высоким содержанием фитостеролов делают эритроциты менее деформируемыми и сокращают продолжительность жизни склонных к инсульту крыс со спонтанной гипертензией.
com и книга Салли Фэллон «Питательные традиции». Дополнительный витамин Е требуется в рационах, заменяющих молоко, которые содержат масло канолы.0035 TRANS ГЕОМЕТРИЧЕСКИЕ ИЗОМЕРЫ НЕЗАМЕНИМЫХ ЖИРНЫХ КИСЛОТ В НЕКОТОРЫХ НЕГИДРОГЕНИРОВАННЫХ РАСТИТЕЛЬНЫХ МАСЛАХ США Важность соотношения незаменимых жирных кислот омега-6/омега-3. Токсикологический профиль для n- HexaneU.S. население: Какие марки салатного или растительного масла вы использовали чаще всего за последние 90 дней? Растительные масла с высоким содержанием фитостеролов делают эритроциты менее деформируемыми и сокращают продолжительность жизни склонных к инсульту крыс со спонтанной гипертензией. США за баррель
США за баррель
 п. до 20%
п. до 20% 0003
0003
 78″ data-price-fx=»USD»> $ 70.78
78″ data-price-fx=»USD»> $ 70.78 48″ data-price-fx=»USD»> $ 52,48
48″ data-price-fx=»USD»> $ 52,48 75″ data-price-fx=»USD»> 54 $. 75
75″ data-price-fx=»USD»> 54 $. 75 50″ data-price-fx=»USD»> 58,50 $
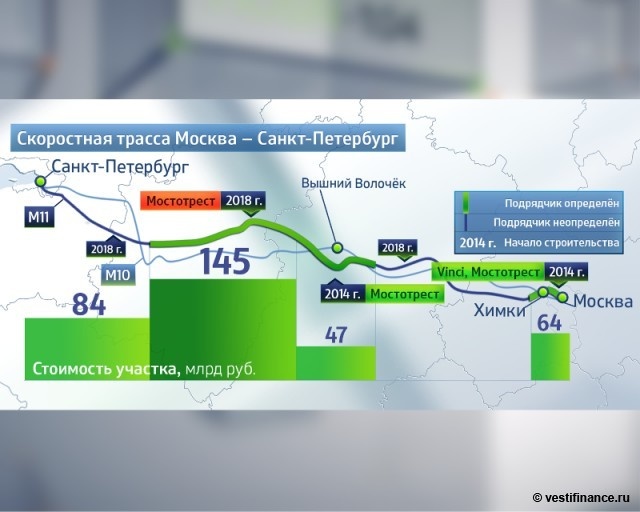
50″ data-price-fx=»USD»> 58,50 $ Путешествие между этими пунктами возможно различными видами транспорта:
Путешествие между этими пунктами возможно различными видами транспорта: Учитывая все обстоятельства, все путешествие должно занять от 2 до 12 часов.
Учитывая все обстоятельства, все путешествие должно занять от 2 до 12 часов.

 Тем не менее, стоит прибыть на автовокзал как минимум за 15 минут до отправления по расписанию.
Тем не менее, стоит прибыть на автовокзал как минимум за 15 минут до отправления по расписанию.
 Для полировки вам понадобятся специальные пасты, например, широко известная паста ГОИ. Понадобится также и инструмент с не очень большим количеством оборотов.
Для полировки вам понадобятся специальные пасты, например, широко известная паста ГОИ. Понадобится также и инструмент с не очень большим количеством оборотов. Если же есть глубокие дефекты, то именно с них и следует начинать. В любом случае, не пытайтесь избавиться от них – как уже было отмечено, снимать вы можете лишь очень тонкий слой стекла. Чтобы ничего не пропустить, на внутренней стороне отметьте маркером такие участки и приступайте к работе. Если пасту необходимо развести водой, предварительно сделайте небольшой «замес».
Если же есть глубокие дефекты, то именно с них и следует начинать. В любом случае, не пытайтесь избавиться от них – как уже было отмечено, снимать вы можете лишь очень тонкий слой стекла. Чтобы ничего не пропустить, на внутренней стороне отметьте маркером такие участки и приступайте к работе. Если пасту необходимо развести водой, предварительно сделайте небольшой «замес». Для поддержания хорошей видимости стекла надо регулярно проводить его шлифовку и полировку. Но не стоит путать эти два понятия. Самостоятельная шлифовка может привести к тому, что вы испортите стекло. Для этого надо обращаться к специалистам.
Для поддержания хорошей видимости стекла надо регулярно проводить его шлифовку и полировку. Но не стоит путать эти два понятия. Самостоятельная шлифовка может привести к тому, что вы испортите стекло. Для этого надо обращаться к специалистам.

 Убедитесь, что вы используете подходящее защитное снаряжение для выбранного вами метода. Если вы используете электроинструменты для шлифовки большого количества стекла, убедитесь, что вы находитесь в хорошо проветриваемом помещении. Шлифовальное стекло превращает его в мелкую пыль, поэтому вам также нужно надеть маску и защитные очки.
Убедитесь, что вы используете подходящее защитное снаряжение для выбранного вами метода. Если вы используете электроинструменты для шлифовки большого количества стекла, убедитесь, что вы находитесь в хорошо проветриваемом помещении. Шлифовальное стекло превращает его в мелкую пыль, поэтому вам также нужно надеть маску и защитные очки.


 Вы можете сушить песок, дерево и металлы в дополнение к стеклу.
Вы можете сушить песок, дерево и металлы в дополнение к стеклу. Подложка не предназначена для использования во влажном состоянии и развалится. Кроме того, абразивная крошка будет забиваться шлифуемым материалом. Груз и зерна увеличат ваши шансы на появление царапин.
Подложка не предназначена для использования во влажном состоянии и развалится. Кроме того, абразивная крошка будет забиваться шлифуемым материалом. Груз и зерна увеличат ваши шансы на появление царапин. Вы собираетесь использовать небольшие круговые движения по поверхности для сухого шлифования, пока вся поверхность не будет покрыта. Это позволит вам копать и удалять любые неровности.
Вы собираетесь использовать небольшие круговые движения по поверхности для сухого шлифования, пока вся поверхность не будет покрыта. Это позволит вам копать и удалять любые неровности.
 Повторяйте это до тех пор, пока ваша бутылка не станет такой гладкой и полированной, как вы хотите.
Повторяйте это до тех пор, пока ваша бутылка не станет такой гладкой и полированной, как вы хотите. Например, если вы шлифуете шероховатую стеклянную поверхность, чтобы сгладить ее, вам нужно будет начать с влажной зернистости 60-80, а затем перейти к более мелкой зернистости.
Например, если вы шлифуете шероховатую стеклянную поверхность, чтобы сгладить ее, вам нужно будет начать с влажной зернистости 60-80, а затем перейти к более мелкой зернистости.
 Если вы используете наждачные листы, положите лист на твердую и прочную рабочую поверхность. Поместите обрезанный край стекла на поверхность абразива. Для максимальной безопасности наденьте защитные очки и перчатки.
Если вы используете наждачные листы, положите лист на твердую и прочную рабочую поверхность. Поместите обрезанный край стекла на поверхность абразива. Для максимальной безопасности наденьте защитные очки и перчатки. Чтобы он оставался достаточно влажным, вам может потребоваться постоянно окунать его в воду.
Чтобы он оставался достаточно влажным, вам может потребоваться постоянно окунать его в воду.
 Отшлифуйте край стекла еще раз, чтобы сделать его еще более гладким. При необходимости отшлифуйте кромку стекла наждачной бумагой все более мелкой зернистости, пока не добьетесь желаемой гладкости. (Примечание: если вы не хотите продолжать использовать электроинструмент, вы можете просто отполировать край стекла вручную.) Когда вы закончите, сотрите остатки пыли или песка чистой влажной тканью после шлифовки.
Отшлифуйте край стекла еще раз, чтобы сделать его еще более гладким. При необходимости отшлифуйте кромку стекла наждачной бумагой все более мелкой зернистости, пока не добьетесь желаемой гладкости. (Примечание: если вы не хотите продолжать использовать электроинструмент, вы можете просто отполировать край стекла вручную.) Когда вы закончите, сотрите остатки пыли или песка чистой влажной тканью после шлифовки. Добавьте ровно столько карбида кремния, чтобы покрыть поверхность лужи. В завершение аккуратно перемешайте пальцами воду и порошок.
Добавьте ровно столько карбида кремния, чтобы покрыть поверхность лужи. В завершение аккуратно перемешайте пальцами воду и порошок. Наждачной бумагой также можно сгладить любые шероховатости, оставшиеся от карбида кремния.
Наждачной бумагой также можно сгладить любые шероховатости, оставшиеся от карбида кремния. Если вы допустили ошибку, используйте ватные палочки, смоченные в жидкости для снятия лака, чтобы стереть ее. Когда вы будете довольны дизайном, используйте малярный скотч или малярную ленту, чтобы покрыть области, которые вы не хотите замораживать. При покрытии узких углов и изогнутых краев используйте небольшие кусочки ленты, обрезанные до нужной формы.
Если вы допустили ошибку, используйте ватные палочки, смоченные в жидкости для снятия лака, чтобы стереть ее. Когда вы будете довольны дизайном, используйте малярный скотч или малярную ленту, чтобы покрыть области, которые вы не хотите замораживать. При покрытии узких углов и изогнутых краев используйте небольшие кусочки ленты, обрезанные до нужной формы. Когда закончите, разверните ленту и сотрите все оставшиеся линии трассировки.
Когда закончите, разверните ленту и сотрите все оставшиеся линии трассировки.