
Завершение обгона через сплошную — лишение или нет?
В российском законодательстве нигде не сказано, что если ты начинал обгон в разрешенном месте, то заканчивать его можно «через сплошную». Иногда говорят о неком решении Верховного суда, которое это позволяет, однако на самом деле его… не было. В свое время Верховный суд действительно планировал дать разъяснения по этому вопросу, однако так и не сделал этого. Оказалось, что нельзя однозначно трактовать ситуации, когда автомобиль выехал на встречку в разрешенном месте, а закончил обгон в неположенном. Каждый случай нужно рассматривать индивидуально. И помнить, что пункт 11.1 российских ПДД четко говорит, что «прежде чем начать обгон, водитель обязан убедиться в том, что полоса движения, на которую он собирается выехать, свободна на достаточном для обгона расстоянии и в процессе обгона он не создаст опасности для движения и помех другим участникам дорожного движения».
Российская судебная практика, увы, не радует водителей. Если гаишник вас поймает при выполнении такого маневра, то судья с высокой долей вероятности лишит вас прав (4-6 месяцев, а при повторном — уже на 1 год). Шансы на спасение есть, и мы про них сейчас расскажем.
Если гаишник вас поймает при выполнении такого маневра, то судья с высокой долей вероятности лишит вас прав (4-6 месяцев, а при повторном — уже на 1 год). Шансы на спасение есть, и мы про них сейчас расскажем.
Разметка
По российскому ГОСТу, сплошная линия разметки не может начинаться вдруг и сразу. Ей должна предшествовать так называемая «линия приближения» — прерывистая разметка, у которой длина штрихов в 3 раза превышает промежутки между ними. При этом между сплошной и прерывистой линией за городом должно быть не менее 100 метров «предупреждающей» разметки (в городе — 50 м).
Прерывистая линияЛиния приближенияЕсли этой линии на дороге нет, она стерлась или ее не видно под снегом, то шансы остаться с правами весьма высоки. Поэтому если гаишник вас остановит, то в обязательном порядке укажите в протоколе об отсутствии необходимой разметки (разумеется, нужно сделать фотографии или видео, и указать это в протоколе).
Крайняя необходимостьИногда этот довод помогает. Однако у вас должны быть весьма четкие доказательства того, что вы завершали обгон через сплошную именно из-за «крайней необходимости». Положим, во избежание ДТП (например, вы уже возвращались на свою полосу в положенном месте, как вдруг на дорогу из леса неожиданно выехал трактор). Но нужно понимать — в российском суде обычно подобным объяснениям не слишком верят. Поэтому вам нужны будут свидетели или видеозапись.
Однако у вас должны быть весьма четкие доказательства того, что вы завершали обгон через сплошную именно из-за «крайней необходимости». Положим, во избежание ДТП (например, вы уже возвращались на свою полосу в положенном месте, как вдруг на дорогу из леса неожиданно выехал трактор). Но нужно понимать — в российском суде обычно подобным объяснениям не слишком верят. Поэтому вам нужны будут свидетели или видеозапись.
Помешали вернуться вовремя
Согласно российским ПДД, запрещается «препятствовать обгону посредством повышения скорости движения или иными действиями». Так вот — если водитель другой машины начал вредничать, решил вас «проучить» за что-то и специально давит на газ, то он нарушает ПДД. Но и здесь нужно понимать — вам нужны будут доказательства этой версии.
Надежда на здравый смысл
Очень часто помогает только она. Ведь, согласитесь, одно дело ехать несколько километров по встречке распугивая всех вокруг и совсем другое — нечаянно заехать на сплошную линию во время обгона колонны больших грузовиков. Обязательно впишите в протокол слова о том, что вы предприняли все меры, чтобы вернуться вовремя в полосу (и что этому помешало), и у вас отсутствовал умысел для нарушения ПДД.
Обязательно впишите в протокол слова о том, что вы предприняли все меры, чтобы вернуться вовремя в полосу (и что этому помешало), и у вас отсутствовал умысел для нарушения ПДД.
Ну а если инспектор все же составил протокол, то на дальнейшее разбирательство в суд вам лучше прийти с адвокатом. Он наверняка покажет решения других судов, которые в похожих случаях возвращали водителям права. И пусть у нас не работает система прецедентов, но на судью такие доводы могут произвести впечатление.
Что делать, если обгон начат на прерывистой, а закончен на сплошной? | Авто-мото
Предположим, что произошло самое страшное: вы все-таки не успели завершить маневр на прерывистой и, закончив его уже на сплошной и вернувшись на свою полосу, были остановлены сотрудником ДПС.
Итак, вам вменяется нарушение Правил дорожного движения, влекущее за собой, согласно статьи 12. 15 часть 4, лишение права управления на срок от 4 до 6 месяцев. Не спешите что-либо подписывать и давать объяснения — пусть инспектор составляет бумаги, которые он считает нужным составить, а вы займитесь изучением дорожной обстановки. Это важно сделать сразу, особенно в случае нарушения на трассе, поскольку в противном случае вам придется возвращаться на это место, а оно может находиться от вашего места проживания очень и очень далеко.
15 часть 4, лишение права управления на срок от 4 до 6 месяцев. Не спешите что-либо подписывать и давать объяснения — пусть инспектор составляет бумаги, которые он считает нужным составить, а вы займитесь изучением дорожной обстановки. Это важно сделать сразу, особенно в случае нарушения на трассе, поскольку в противном случае вам придется возвращаться на это место, а оно может находиться от вашего места проживания очень и очень далеко.
Фото: pixabay.com
Во-первых, сделайте фотографии данного участка. Фотографии на мобильный телефон вполне достаточно. В поле зрения объектива камеры должно попасть все: дорога, дорожная разметка, знаки, автомобиль ДПС, ваш автомобиль. Возьмите себе за правило — все фотографировать. Не забудьте сделать фотографию, на которой начало сплошной линии разметки будет дублироваться знаком 3.
Во-вторых, разметке 1.1 (сплошная) всегда предшествует разметка 1.6, расположенная между 1.1. и 1.5 (прерывистая) и указывающая на то, что скоро и начнется та самая сплошная. На основании ГОСТ 52289–2004 между «прерывистой» (1.5) и «сплошной» (1.1) линиями разметки вне населенного пункта должно быть не менее 100 метров разметки «приближение к сплошной линии» (1.6), а в населенном пункте — 50 метров.
Разумеется, с рулеткой ходить не нужно. Чтобы вычислить протяженность, достаточно измерить две величины: длину одной линии 1.6 и расстояние между линиями.
Далее достаточно сложить получившиеся расстояния и получить протяженность разметки 1.6. Если она менее 100 или 50 метров соответственно, то это основание для четкого и однозначного утверждения: нарушение требований ГОСТ — соответственно, на невозможность завершить начатый маневр.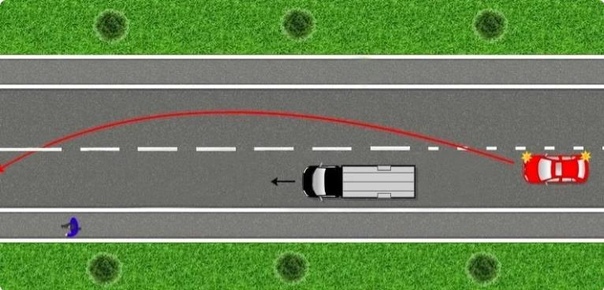
В-третьих, четко установите место совершения вменяемого правонарушения и, соответственно, место нанесения разметки. Найдите ближайший километровый столбик и шагами определите, какая разметка на каком участке — ведь инспектор в существе нарушения не будет указывать, что вы начали обгон на разрешенном участке и закончили в месте, где это запрещено ПДД. В протоколе вы увидите банальную фразу: «Совершил обгон с выездом на полосу встречного движения».
В-четвертых, в протоколе не указывайте, согласны вы с нарушением или нет. Не пишите, как вы заехали на сплошную и сколько ехали по встречной, а отразите все произведенные вами замеры и укажите о наличии фотографий. На все необходимые процедуры потребуется 20 минут
На все необходимые процедуры потребуется 20 минут
Фото: pixabay.com
На первый взгляд, для выполнения этих четырех практических советов нужно много времени и сил, но это не так. Все это займет от силы 20 минут. Согласно практике, такое рвение водителя говорит о его юридической грамотности, что само по себе — редкость, поэтому многие инспекторы предпочитают с такими не связываться и отпускают со словами «Больше не нарушай». Помимо 20 дополнительно потраченных минут, это позволит вам сохранить свое водительское удостоверение.
Но что делать, если все соответствует ГОСТ и придраться просто не к чему? В данном случае на основании ст. 2.1 КоАП
Лицо признается виновным в совершении административного правонарушения, если будет установлено, что у него имелась возможность для соблюдения правил и норм, за нарушение которых Кодексом предусмотрена административная ответственность, но данным лицом не были приняты все зависящие от него меры по их соблюдению.

Все, что вы могли сделать для возврата на свою полосу, это применить экстренное торможение и, в худшем случае, вклиниться, допустим, в идущую колонну автомобилей, чем создали бы аварийную ситуацию и общественную опасность. Поэтому в протоколе об административном правонарушении вы можете сделать запись о том, что вы не согласны с вменяемым нарушением, без объяснения всей ситуации.
Обгон запрещенФото: pixabay.com
По статье 12.15.4 КоАП вас также могут привлечь, если вы завершили маневр обгона в зоне действия дорожного знака 3.20 «Обгон запрещен». Позиция защиты в таком случае будет идентичной описанной выше, за исключением одного дополнительного нюанса.
Знак 3.
20 запрещает обгон всех транспортных средств, но подразумевает под собой начало совершения такого маневра, а не его процесс или завершение.
Тем более что знак 3.20 может быть попросту не виден, например, из-за грузового автомобиля, обгон которого производился.
Перед совершением маневра всегда убедитесь в его безопасности и невозможности трактования сотрудниками ГИБДД в свою пользу. Удачного вождения автомобиля!
Стоит ли лишать прав за обгон через сплошную — Российская газета
Владимир Кузин, замначальника Главного управления по обеспечению безопасности дорожного движения МВД России:Считать или не считать движением по встречной полосе случаи, когда водитель начал обгон через разрешающую прерывистую линию разметки и закончил уже через сплошную? Это давний и очень спорный вопрос.:no_upscale()/imgs/2019/05/14/15/3288371/45db80932691a8a29a617dec4fd4c16000e31fdc.jpeg)
В связи с тем, что пленум Верховного суда в проекте своего постановления предлагает считать такой маневр движением по встречной полосе и наказывать за это по всей строгости части 4 статьи 12.15, то есть лишением прав, председатель Движения автомобилистов России Виктор Похмелкин и выступил со своим открытым письмом.
К сожалению, до сих пор очень многие водители пытаются доказать свою правоту именно теми аргументами, которые предлагает Виктор Похмелкин. Что начал обгон там, где это было разрешено, но не успел закончить. Что в КоАП говорится о выезде в нарушение правил, а не о заезде обратно.
Но как тогда отсечь злаки от плевел? Кто действительно не смог завершить маневр и вернулся на свою полосу при первой возможности, а кто сознательно двигался по встречной полосе?
Правила едины для всех. Если обгон запрещен, то машина должна вернуться в свою полосу. Тем более что прерывистая разметка не заканчивается неожиданно. Перед тем как она перейдет в сплошную, появляется удлиненная разметка 1. 6. Она предупреждает о том, что пора вернуться в свою полосу. Но если следовать логике, приведенной в открытом письме, то выезжать на встречную можно и на этой разметке, а возвращаться обратно — когда захочется. Ведь выезд был совершен там, где он еще не запрещен?
6. Она предупреждает о том, что пора вернуться в свою полосу. Но если следовать логике, приведенной в открытом письме, то выезжать на встречную можно и на этой разметке, а возвращаться обратно — когда захочется. Ведь выезд был совершен там, где он еще не запрещен?
А тогда за движение по встречной полосе, если начал обгон там, где разрешено, и закончил там, где разрешено, но при этом в какой-то момент двигался вдоль сплошной, вообще наказывать не стоит.
Таким образом, вообще бессмысленно запрещать движение по встречной полосе. Пользуясь такой трактовкой правил, водители поголовно будут ехать по встречной полосе и создавать аварийные ситуации. Стоит напомнить, что именно лобовые столкновения славятся наиболее тяжкими последствиями.
Кстати, сплошная полоса наносится не только перед участками с ограниченной видимостью, но и перед пешеходными переходами. Вы обгоняете фуру, и не видите, может, там пешеход дорогу переходит. Пройти перед фурой он успевает, а перед едущим по встречной полосе автомобилем — вряд ли.
Сплошная наносится и перед перекрестками. Водитель не закончил обгон, а ему в лоб выезжает с примыкающей дороги другая машина.
Также бессмысленно высчитывать, через сколько метров после начала сплошной водитель вернулся в свою полосу. Началась сплошная — водитель уже должен двигаться по своей полосе.
мнение
Вячеслав Лысаков, депутат Госдумы:
Решение Пленума Верховного суда о спорных случаях на дорогах еще только готовится. Но многие его положения уже сейчас вызывают горячие споры. Особенно болезненную реакцию вызывает вопрос о наказании за обгон с выездом на встречную полосу через сплошную линию разметки.
Видимо, судьи склоняются к тому, чтобы наказание за все варианты такого маневра было предельно жестким — лишение прав сроком на 4 — 6 месяцев.
Однако у многих вызывает сомнение, что эта кара будет справедливой в том случае, если водитель начал обгон через прерывистую линию разметки, а закончил через сплошную.
Как раз об этом написал Виктор Похмелкин в Верховный суд. Он ссылается на формулировку КоАП: «в части 4 статьи 12.15 КоАП РФ речь идет именно о выезде в нарушение ПДД на полосу встречного движения, но не о возврате на свою полосу и не об обгоне в целом. Однако в рассматриваемой ситуации водитель выезжает на «встречку» вполне правомерно — через прерывистую линию, пересекать которую Приложение 2 к ПДД разрешает. И даже если водитель начал обгон на разметке 1.6, предупреждающей о приближении сплошной линии, он действует законно. Ведь в том же Приложении 2 к ПДД ясно сказано, что прерывистую линию 1.6 разрешается пересекать с любой стороны.
Он ссылается на формулировку КоАП: «в части 4 статьи 12.15 КоАП РФ речь идет именно о выезде в нарушение ПДД на полосу встречного движения, но не о возврате на свою полосу и не об обгоне в целом. Однако в рассматриваемой ситуации водитель выезжает на «встречку» вполне правомерно — через прерывистую линию, пересекать которую Приложение 2 к ПДД разрешает. И даже если водитель начал обгон на разметке 1.6, предупреждающей о приближении сплошной линии, он действует законно. Ведь в том же Приложении 2 к ПДД ясно сказано, что прерывистую линию 1.6 разрешается пересекать с любой стороны.
Кроме того, пункты 11.1, 11.2 и 11.4 ПДД, посвященные правилам обгона, не содержат ни слова о недопустимости этого маневра, если его завершение производится через сплошную линию разметки. Оговаривается только обязанность водителя убедиться в том, что он не создаст опасности для движения и помех для других участников движения». Споры на эту тему идут давно. Действительно, многие начавшие обгон как положено не успевают перестроиться. Зачастую мешают сами коллеги-автомобилисты, которые ускоряются, когда их обгоняют, не держат дистанции перед впереди идущим автомобилем. Но с другой стороны, перед тем как начать обгон, водитель должен убедиться в безопасности маневра. И закончить его он должен вовремя. Ведь если началась сплошная линия, значит, видимость тут ограничена и в любой момент навстречу может выскочить автомобиль, или выйти пешеход. Не уверен — не обгоняй. Другое дело, что момент перехода прерывистой линии разметки в сплошную требуется сделать более ярким. Например, как в Финляндии. Там участок линии переходящей в сплошную выделен желтым цветом. В наших реалиях сплошная может не соответствовать опасности участка. У нас зачастую сплошная линия разметки может быть нанесена на прямом участке дороги с хорошей видимостью, но без видимых на то причин. Довольно часто бывает, что на протяжении десятков километров в сплошной нет разрывов. Между тем, в Великобритании в стандартах заложено, что через определенное количество километров сплошная линия должна иметь разрыв.

Что грозит за завершение обгона через сплошную, если начал обгон на прерывистой
Правила движения часто дополняются нововведениями и дополнениями. Некоторые моменты, например, обгон или опережение вызывают вопросы даже у опытных водителей. Сегодня в статье разобраны все нюансы, касающиеся правильных манёвров с существующими поправками на 2019 год.
Разрешено ли завершать обгон через сплошную
Согласно ПДД России на любой дороге, где предусмотрено движение транспорта в обе стороны, запрещено двигаться по встречной полосе, которая отделена разметкой:
Исключение лишь разметка 1.11 —сплошная с прерывистой, которая разрешает пересечение, но только для завершения манёвра объезда или обгона.Таким образом, пересекать разметку 1.1 и 1.3 запрещено, если обгон не может быть закончен до начала этих линий, то от него нужно отказаться и вернуться на занимаемую полосу.
Особенности и условия завершения манёвра
Обгон, согласно правилам — это опережение впереди идущего транспорта (одного или нескольких), во время которого совершается выезд на полосу встречного направления. Окончание манёвра завершается возвратом на попутную полосу.Опережение в новой трактовке — это обгон впереди идущего автомобиля без выезда на встречную дорогу.
Окончание манёвра завершается возвратом на попутную полосу.Опережение в новой трактовке — это обгон впереди идущего автомобиля без выезда на встречную дорогу.
Разобравшись в определениях, проще понять особенности совершения манёвра, который предусматривает пересечение разметки:
- Перед началом манёвра автомобилист должен убедиться в отсутствии на встречной дороге других автомобилей, чтобы не создать аварийной ситуации остальным участникам движения.
- Нужно убедиться в том, что транспортное средство позади или впереди не собирается совершать аналогичные действия, а если оно начало маневрировать, запрещено создавать помехи.
- Запрещено совершать обгон, если заведомо ясно, что его завершение создаст опасную ситуацию при возвращении в свою полосу.
Обгонять запрещено на сложных участках дорог и с ограниченной видимостью (ж/д переезд, мост, туннель и т. д.), а также на пешеходной зебре.
Наказание за нарушение правил
Выезд или пересечение сплошной линии разметки рассматривается несколькими статьями Кодекса РФ об административных правонарушениях. В зависимости от последствий, которые возможно повлекло за собой нарушение, дело рассматривают либо внутренние органы, либо судебные инстанции.
Важно! Если действия водителя при обгоне спровоцировали ДТП с тяжёлыми последствиями, это нарушение может быть переквалифицировано в уголовное преступление.
Предусмотренное наказание:- Ст. 12.15 — выезд на разметку грозит денежным взысканием в размере 1 000–1 500 ₽, пересечение линии, штраф 5 000 ₽ или лишение прав водителя на 4–6 мес. Повторное нарушение лишит водителя прав на 1 год или сумма штрафа составит 5 000₽, если была видеофиксация.
- Ст. 12.16 ч. 1 — несоблюдение правил обгона повлечёт либо предупреждение, либо штраф 500 ₽.
- Ст. 12.16 ч. 2 — при совершении разворота или поворота через разметку взыскание в размере 1 000–1 500₽.
Эти правонарушения рассматривают сотрудники ГИБДД, однако есть ситуации, которые рассматриваются в суде:
- Если при нарушении причинён вред лёгкой степени тяжести, с водителя удержат 2 500 ₽ или 5 000 ₽, могут лишить ВУ на 1–1,5 года.
- Аналогичная ситуация с причинением вреда средней степени повлечёт штраф 10 000–25 000₽ или лишение удостоверения на 1,5–2 года.
Таким образом, лучше не начинать правильно манёвр, если вы не успеваете его закончить до начала разметки. В противном случае придётся заплатить штраф или же лишиться водительских прав.
Подписывайтесь на наши ленты в таких социальных сетях как,
Facebook,
Вконтакте,
Instagram,
Pinterest,
Yandex Zen,
Twitter и
Telegram:
все самые интересные автомобильные события собранные в одном месте.
Завершение обгона через сплошную | AVTONAUKA.RU
Ситуация: двухполосная загородная дорога, день ясный, видимость хорошая. Впереди «видеорегистратора» едет грузовик, регистратор движется на некотором расстоянии позади него. «Осевая» разметка 1.5 — прерывистая. Обгон на этом участке дороги не запрещен, но есть встречные машины.
Впереди нерегулируемый перекресток, о чем информирует знак 2.3.3 «Примыкание второстепенной дороги слева», и примерно от места установки знака разметка 1.5 переходит в удлиненную разметку 1.6. Данная разметка предупреждает, что скоро она сменится на сплошную линию 1.1.
И через несколько секунд в кадре на переднем плане появляется обгоняющий легковой автомобиль, а на заднем плане в районе перекрестка появляются две встречные легковые машины. Разъезд завершился благополучно благодаря тому, что водитель грузовика, предвидя опасную ситуацию, сместился вправо, таким образом освободив место для маневра.
Посмотрите короткий видеоролик.
Автор видеоролика
Несмотря на благополучный исход, водитель обгоняющего автомобиля завершил обгон через сплошную линию разметки. Причины, по которым это произошло, не важны, точнее, это уже совсем другой вопрос, но они могут повлиять на степень наказания за обгон через сплошную.
Штраф за завершение обгона через сплошную линию разметки налагается в виде лишения прав до полугода, если водитель не сможет доказать, что у него не было возможности вернуться на свою полосу без нарушения, например, ему препятствовали превышением скорости. Или, например, были какие-то обстоятельства непреодолимой силы.
Тема завершения обгона через сплошную линию ранее обсуждалась в одноименной статье Завершение обгона через сплошную из рубрики Вопрос — Ответ. За это нарушение на водителя могут быть наложены санкции двух видов: либо «лишение прав», либо штраф за пересечение сплошной линии разметки. Какое из них выберет суд — зависит от обстоятельств.
За это нарушение на водителя могут быть наложены санкции двух видов: либо «лишение прав», либо штраф за пересечение сплошной линии разметки. Какое из них выберет суд — зависит от обстоятельств.
Ваше внимание хочется заострить на следующем. Пример водителя грузовика в этой ситуации показательный.
Когда происходит столкновение, то в нем участвуют как минимум двое. Если у одного из участников ситуация выходит из-под контроля, а второй не может своевременно это заметить или предусмотреть, то обстоятельства могут плохо обернуться для них обоих.
На ролике хорошо видно, как водитель грузовика сместился вправо, и даже на обочину съехал, освобождая место на дороге. Если бы он этого не сделал, то обгоняющий столкнулся бы со встречными машинами. А дальше — рикошетом задело бы еще кого-нибудь, возможно, и грузовик тоже.
Таким образом, вовремя принятое решение избавило всех участников от неприятностей. Такое возможно, когда водитель видит и контролирует дорожную ситуацию вокруг своего автомобиля.
В завершении разбора этой дорожной ситуации несколько слов об обгоне.
Во избежание подобных случаев, как обгоняющий авто в нашем ролике, приступая к обгону, всегда нужно оценить свободное расстояние на дороге и предусмотреть место, где будете уходить со встречной полосы. Нет смысла «тянуть» до последнего. Ведь, встречный транспорт приближается намного быстрее, чем можно предположить.
Еще нужно помнить, что совершая обгон, можно не заметить какую-то важную дорожную информацию, например, знаки на правой стороне дороги, которые помогут сориентироваться в дальнейшем.
Будьте внимательны за рулем.
Навигация по серии статей<< Опасность затяжного обгонаЧто делать, если обгон начат на прерывистой, а закончен на сплошной
Банальная ситуация на дороге – движущийся впереди автомобиль перемещается со скоростью черепахи, нагоняя смертельную скуку.
Что станет делать любитель адекватной езды или экстремального драйва? Попробует обогнать едва «ползущий» автомобиль, как только впереди замаячит прерывистая линия, разрешающая обгон.
Но не всегда удается правильно рассчитать пространство для такого маневра как завершение обгона через сплошную, поэтому автомобилистов живо интересует, что делать, если обгон начат на прерывистой, а закончен на сплошной.
Ответ тем более актуален, если подобные действия фиксирует ДПС – пересечение сплошной линии влечет денежный штраф или лишение прав на 4-6 месяцев.
Является ли нарушением завершение обгона по сплошной
Водителю вменяют нарушение ПДД и штраф за завершение обгона через сплошную линию разметки. И что интересно, сотрудник ДПС зафиксирует обгон с выездом на «встречку», а не начало обгона на разрешенном участке пути с невозможностью завершить маневр по правилам.
Для начала не помешает продемонстрировать инспектору свою грамотность, поэтому водитель может предпринять следующие действия:
- Сфотографировать участок дороги на мобильный телефон. На снимках четко должна быть видна проезжая часть, разметка, дорожные указатели, автомобили сотрудников ДПС и «правонарушителя».
 Очень не помешает запечатлеть знак «3.20», отмечающий начало сплошной.
Очень не помешает запечатлеть знак «3.20», отмечающий начало сплошной. - Сделать замеры разметки. Перед сплошной 1.1, которую пересекать категорически нельзя, всегда идет разметка 1.6 (между 1.1 и 1.5) – «маякует» о приближении к сплошной. Длина 1.6 на трассе составляет 100 метров, в населенном пункте – 50 м – стоит проверить эти цифры.
- Если длина предупреждающей разделительной полосы не соответствует ГОСТ, можно «съезжать» на невозможность завершить маневр обгона с технической стороны – мало пространства. Нужно четко обозначить место совершения вменяемого правонарушения.
Подобные действия не порадуют сотрудника ГИБДД. За редким исключением инспектор захочет связываться со слишком умным водителем и пожелает «Счастливого пути».
Если инспектор составил протокол, не стоит подтверждать свое согласие или несогласие с фактом правонарушения. Лучше указать на наличие фотографий участка дороги и замеров разделительной полосы. Полчаса потраченного времени могут сохранить водителю удостоверение.
Можно ли завершить обгон через сплошную
Описанные выше действия помогают не всегда – разметка соответствует ГОСТу, инспектор не в настроении. Смысл ст. 2.1 КоАП применительно к данной ситуации выглядит так:
- У лица была возможность соблюсти правила.
- Лицо не предприняло зависящие от него меры.
- Лицо является виновным в правонарушении – и с этим можно поспорить.
Маневр обгона начат правильно, указатель «3.20» не был в поле зрения водителя, к примеру, обзор закрыла габаритная техника.
Пересечение сплошной линии при завершении обгона
Чтобы завершить обгон правильно, то есть, не пересечь сплошную линию, водителю пришлось бы затормозить на «встречке». Это могло спровоцировать опасную ситуацию на дороге или привести к аварии.
Вывод – водитель не располагал всеми возможностями для соблюдения правил и норм КоАП. Так и нужно обозначить в протоколе, а чтобы избежать подобных неприятностей, стоит перед обгоном убедиться, что пространства для маневра достаточно.
Ловушки инспекторов ДПП РК на трассе / Юридический блог адвоката / АДВОКАТ АСТАНЫ
Ловушки инспекторов ДПП РК на трассе.
На сегодняшний день одним из уловок и хитростей инспекторов дорожно-патрульной полиции РК, является выслеживание ТС на трассе с целью фиксации совершаемого обгона водителями ТС на трассе. Одним из ловушек ДПП на которые часто попадаются водители, это завершение обгона на трассе через сплошную линию разметки.
На эту уловку попадаются многие водители поскольку, не подозревая того, что начатый обгон через прерывистую линию может быть завершен через сплошную линию они смело выезжают на встречную полосу дороги даже несмотря, что ведется видео или фото фиксация. Большинство водителей совершают обгон на трассе подобным способом поскольку уверены в том, что завершение обгона через сплошную линию начатого через прерывистую линию не является нарушением ПДД РК.
В соответствии с подпунктом 10) пункта 1 раздела 1 ПДД РК, обгон – это опережение движущегося впереди одного или нескольких транспортных средств, связанное с выездом из занимаемой полосы и последующим возвращением на ранее занимаемую полосу.
Согласно пункту 1 раздела 11 ПДД РК, прежде чем начать обгон, водителю необходимо убедиться в том, что:
1) полоса движения, на которую он намерен выехать, свободна на достаточном для обгона расстоянии и этим маневром он не создаст помех встречным и движущимся позади по этой полосе транспортным средствам, в том числе и подающим предупредительные сигналы в соответствии с пунктами 12 и 13 раздела 19 Правил;
2) транспортное средство, следующее позади по той же полосе, не начало обгон;
3) водитель транспортного средства, движущегося впереди по той же полосе, не подал сигнал о маневрировании налево;
4) по завершении обгона с выездом на полосу (сторону) встречного движения он сможет, не создавая помех обгоняемому транспортному средству, вернуться на ранее занимаемую полосу.
Выполняя все требования раздела 11 ПДД РК, водитель ТС начинает совершать обгон с выездом на встречную полосу дороги именно на прерывистой линии разметки дороги, однако в ходе опережения транспортных средств не всегда водителю удается рассчитать, длительность расстояния прерывистой полосы и скорость передвигаемых транспортных средств которых следует обгонять. В результате подобного обгона и не точного расчета водителю не удается завершить начатый маневр по обгону и опережению транспортных средств на прерывистой линии, что вынуждает его завершать маневр на сплошной линии разметки. С подобной ситуацией наверняка сталкиваются многие водители, которые выезжают на трассу. Начинаешь обгон габаритного транспортного средства, все делаешь по правилам, но вдруг не успеваешь завершить его, прерывистая линия заканчивается, и ты вынужден завершить обгон уже через сплошную линию разметки.
Подобная ситуация может возникнуть не только по причине габаритного объема обгоняемых транспортных средств, но и в связи с высокой скоростью их движения. Нередко встречаются случаи, когда водители транспортных средств, которых, обгоняют другие ТС начинают создавать препятствия увеличивая скорость движения, что является нарушением ПДД РК. Однако подобные ситуации сложно доказать в связи с отсутствием фиксации их скорости.
Оценивая подобную ситуацию с юридической точки зрения, в соответствии с действующими нормами законодательства РК, можно утверждать, что водитель ТС не имел умысла нарушать существующие нормы ПДД РК, а также подобное завершение начатого движения не является нарушением норм ПДД РК. Инспекторы ДПП, которые фиксируют подобные обгоны толкуют нормы действующего ПДД РК в свою пользу, утверждая, что сплошную линию нельзя пересекать, даже в том случае если вы не успели завершить обгон на протяжении прерывистой линии.
В судебной практике мнения судей имеют различные и противоречивые толкования. Если одни судьи поддерживая наши доводы признают завершение обгона через сплошную линию разметки правомерными в силу того, что начало обгона была совершена через прерывистую линию разметки, то другие судьи поддерживают действия инспекторов ДПП признавая виновными водителей ТС в совершении административного правонарушения, предусмотренного частью 3 статьи 596 КоАП РК.
Как быть в подобных ситуациях?
В первую очередь необходимо водителю проявить бдительность на дорогах и не попадаться в такие ситуации, тем более на такие ловушки инспекторов ДПП.
Ну если так получилось, что вы попались на такие уловки инспекторов ДПП и в отношении вас был составлен протокол об административном правонарушении, то Вам следует не соглашаться с доводами инспектора и требовать направления дела в суд для разбирательства в судебном порядке.
ОСТАВИТЬ ОТЗЫВЫ ОБ АДВОКАТЕ ГОРОДА НУР-СУЛТАН
На разбирательство в суд вам следует подготовиться и лучше прийти с адвокатом.
Проходит | Руководство по водителям Грузии — 2019
Грузия Прочие правила
Как проехать по двухполосной дороге
- Дождитесь начала зоны обгона.
 Зона обгона обозначена полосатыми линиями справа от центральной линии проезжей части. Если линия, ближайшая к вашему автомобилю, сплошная, вы не находитесь в зоне обгона. Посмотрите вперед по проезжей части, чтобы определить длину зоны обгона и наличие транспорта, приближающегося с противоположной стороны.У вас должно быть достаточно времени и места, чтобы выполнить маневр обгона и полностью вернуть транспортное средство на правую полосу до того, как закончится зона обгона, до въезда на перекресток и до того, как встречный транспорт окажется в пределах 200 футов от вашего транспортного средства;
Зона обгона обозначена полосатыми линиями справа от центральной линии проезжей части. Если линия, ближайшая к вашему автомобилю, сплошная, вы не находитесь в зоне обгона. Посмотрите вперед по проезжей части, чтобы определить длину зоны обгона и наличие транспорта, приближающегося с противоположной стороны.У вас должно быть достаточно времени и места, чтобы выполнить маневр обгона и полностью вернуть транспортное средство на правую полосу до того, как закончится зона обгона, до въезда на перекресток и до того, как встречный транспорт окажется в пределах 200 футов от вашего транспортного средства; - Перед тем, как покинуть полосу движения и начать обгон, проверьте свой вид сзади и боковые зеркала, затем поверните голову и посмотрите назад, чтобы проверить свое «слепое пятно». Убедитесь, что никто не проходит мимо вас;
- Включите левый указатель поворота, когда начнете обгон;
- Проезжайте налево и не возвращайтесь в правую полосу, пока ваш автомобиль не окажется на безопасном расстоянии от обгоняемого автомобиля.
 Подождите, пока вы не увидите в зеркале заднего вида машину, которую только что проехали;
Подождите, пока вы не увидите в зеркале заднего вида машину, которую только что проехали; - Включите сигнал правого поворота, прежде чем вернуться на правую полосу движения. Не забудьте выключить сигнал, когда вернетесь на правую полосу.
Обгон запрещен на двухполосных дорогах:
- На участках, обозначенных сплошной желтой линией справа от центральной линии, знаком «Не проезжать» или двойными желтыми линиями;
- В пределах 100 футов от железнодорожного переезда;
- В пределах 100 футов от моста, виадука или туннеля;
- Когда автомобиль, приближающийся с противоположной стороны, делает обгон небезопасным или будет находиться в пределах 200 футов от вашего транспортного средства до завершения маневра обгона;
- На холме или повороте, где невозможно увидеть встречные транспортные средства, которые могут быть достаточно близко, чтобы представлять опасность;
- На обочине дороги;
- Когда школьный автобус останавливается для загрузки или разгрузки пассажиров.

Обгон разрешен, когда:
- Законный обгон и обгон другого транспортного средства, движущегося в том же направлении;
- Препятствие заставляет двигаться слева от центральной линии, но только после уступки встречному движению;
- Проезжая часть включает две или более размеченных полосы движения в одном направлении;
- Дорога с более чем одной полосой движения ограничена для движения с односторонним движением. На многополосной автомагистрали с двусторонним движением вы никогда не должны двигаться слева от центральной линии, за исключением случаев, когда это разрешено сигналами или знаками управления движением, или при повороте налево на переулок, частную дорогу или подъездную дорожку.
Обгон справа
Вы можете проезжать справа от другого транспортного средства, которое делает или собирается повернуть налево, если ширина тротуара достаточна для вашего транспортного средства и транспортного средства, которое поворачивает налево. Вы также можете проезжать справа при движении по многополосной автомагистрали с двумя или более полосами движения в одном направлении.
Когда кто-то обгоняет вас
Когда водитель позади вас обгоняет ваш автомобиль, обратите внимание на любые небезопасные действия другого водителя.Считается вежливым немного снизить скорость, чтобы другому автомобилю было легче обогнать вас. Незаконно увеличивать скорость до того, как вас полностью обгонит обгоняющий автомобиль.
Обгон остановленных автомобилей
Каждый раз, когда какое-либо транспортное средство останавливается, чтобы позволить пешеходу пересечь проезжую часть на обозначенном пешеходном переходе или на любом немаркированном пешеходном переходе на перекрестке, водитель любого другого транспортного средства, приближающегося сзади, не должен обгонять и обгонять остановившееся транспортное средство.При остановке, позволяющей пешеходу перейти впереди вас, оставьте достаточно места между вашим автомобилем и пешеходным переходом, чтобы приближающиеся автомобилисты могли видеть весь пешеходный переход.

Снизьте скорость и приготовьтесь остановиться, если вы приближаетесь к перекрестку, на котором остановлены другие транспортные средства, даже если устройства управления движением показывают, что им разрешено движение. Если их останавливают, потому что они позволяют пешеходу переходить проезжую часть, их транспортное средство может закрывать вам обзор пешехода.
Проезжающие велосипедисты
Велосипедисты имеют на дороге те же права и обязанности, что и автомобилисты. Велосипедистам разрешается передвигаться по центру полосы движения, если с правой стороны дороги есть угрозы безопасности (например, припаркованные автомобили или мусор) или если полоса слишком узкая для велосипеда и транспортного средства. Осторожно проезжайте мимо велосипедистов, обращайтесь с ними, как с любым другим транспортным средством, и в соответствии с законодательством Джорджии. Закон требует, чтобы при проезде водитель оставался на расстоянии не менее трех футов между водителем и велосипедистом. Если оставлять три фута свободного пространства небезопасно, водитель должен подождать, пока велосипедист сможет безопасно обойти велосипедиста. Велосипедные полосы не являются полосами для проезда и никогда не должны использоваться для проезда другого транспортного средства.
Если оставлять три фута свободного пространства небезопасно, водитель должен подождать, пока велосипедист сможет безопасно обойти велосипедиста. Велосипедные полосы не являются полосами для проезда и никогда не должны использоваться для проезда другого транспортного средства.
Мотоциклисты, проезжающие мимо
Мотоциклист на законных основаниях занимает всю ширину одной полосы движения во время движения. Обгоняя мотоциклиста, водитель должен проехать по соседней полосе. Водителям не разрешается занимать одну полосу с мотоциклистом при их проезде.
Ткачество
Переплетение с одной полосы движения на другую для того, чтобы двигаться быстрее, чем поток движения, является незаконным.Автомобилист может менять полосу движения на многополосной автомагистрали и обгонять медленно движущиеся транспортные средства только тогда, когда это безопасно. Сигналы водителя о смене полосы движения должны быть четко обозначены, чтобы предупреждать транспортные средства о движении.
Поворот автомобилей регулируется законом, и его несоблюдение или несоблюдение является нарушением. Водители должны знать и понимать законы, чтобы безопасно выполнять поворот и избегать столкновений.
СТОП
ПОВОРОТ ВПРАВО
ПОВОРОТ ВЛЕВО
Сигнал поворота должен подаваться всякий раз, когда выполняется поворот вправо или влево.Вы должны подавать непрерывный сигнал поворота на достаточном расстоянии, чтобы предупредить других водителей перед поворотом. Никогда не решайтесь на поворот в «последнюю минуту». Быстрый или беспорядочный поворот может быть опасным для вас и других водителей.
Незаконные сигналы
Запрещается мигать указателями поворота в качестве любезности или передавать сигнал другим водителям сзади.
Как повернуть направо
- Используя соответствующие сигналы и предупредив водителей впереди и позади вас, активируйте сигнал правого поворота;
- Подъезжайте к перекрестку на правой полосе, оставаясь как можно ближе к бордюру или краю проезжей части;
- Если на дороге, по которой вы едете, есть велосипедная полоса, вы должны уступить дорогу велосипедистам, идущим прямо через перекресток, прежде чем повернуть направо;
- Поверните так, чтобы попасть в правую полосу улицы, на которую вы свернули, и не выезжайте на другую полосу движения.
Если на улице, с которой вы поворачиваете, есть несколько полос для поворота, завершите поворот так, чтобы ваш автомобиль оказался на соответствующей полосе на улице, на которую вы поворачиваете.
Как повернуть налево
- Используя соответствующие сигналы и предупредив водителей впереди и позади вас, активируйте левый указатель поворота;
- Переместитесь на крайнюю левую полосу движения в том направлении, в котором вы движетесь, или на полосу поворота, если таковая имеется;
- Держите колеса прямо, пока не начнете поворот;
- уступить дорогу всем транспортным средствам, включая велосипеды, которые приближаются с противоположной стороны, и пешеходам, переходящим любую проезжую часть;
- Когда это безопасно и разрешают светофоры / знаки, поверните так, чтобы ваш автомобиль оказался на полосе, ближайшей к центральной полосе (полосам) в вашем направлении движения на улице, на которую вы свернули, или ближайшей к ней. до центральной линии, если центральная полоса отсутствует;
- Если на улице, с которой вы поворачиваете, есть несколько полос для поворота, завершите поворот так, чтобы ваше транспортное средство оказалось на соответствующей полосе на улице, на которую вы поворачиваете;
- После того, как вы въехали на перекресток, чтобы повернуть налево, вы не можете менять полосу движения на перекрестке;
- Вы должны останавливаться и стоять на месте для пешеходов на пешеходном переходе дороги, на которую вы поворачиваете, до тех пор, пока они не освободят полосы движения, по которым вы движетесь.
Наблюдение за пешеходами при повороте
На большинстве перекрестков, где есть пешеходный сигнал, сигнал «Идите» на перекрестке улицы соответствует зеленому свету проезжей части, по которой вы движетесь. Это означает, что когда вам разрешено повернуть, пешеходам разрешается переходить улицу, на которую вы поворачиваете одновременно. Поэтому перед поворотом вы должны остановиться и оставаться остановленными для всех пешеходов на пешеходном переходе дороги, на которую вы хотите повернуть, до тех пор, пока они не освободят полосы движения, по которым вы движетесь.
Развороты
Не делайте разворотов на повороте или около вершины холма, если вас не могут увидеть другие водители, приближающиеся с любого направления. Не разворачивайтесь в местах, запрещающих знаки.
Выполнение поворотов на многополосных автомагистралях
На многополосной автомагистрали с двусторонним движением запрещается движение слева от центральной линии, за исключением случаев поворота налево. При наличии сигналов или знаков управления движением вы можете завершить поворот только в том случае, если это разрешено сигналами или знаками управления движением.При повороте налево вы всегда должны уступать дорогу встречному транспорту и ждать, пока пешеходы освободят полосы движения, проезжую часть, тротуар или переулок, в который вы поворачиваете.
При наличии сигналов или знаков управления движением вы можете завершить поворот только в том случае, если это разрешено сигналами или знаками управления движением.При повороте налево вы всегда должны уступать дорогу встречному транспорту и ждать, пока пешеходы освободят полосы движения, проезжую часть, тротуар или переулок, в который вы поворачиваете.
Парковка на шоссе — нарушение закона. Если транспортное средство отключено, вы должны приложить все усилия, чтобы припарковаться на шоссе, оставив свободный проход и беспрепятственный обзор вашего транспортного средства на 200 футов в каждом направлении.
Остановка, остановка или парковка запрещены в любое время при следующих условиях:
- На стороне улицы любого припаркованного транспортного средства;
- На тротуаре;
- На перекрестке;
- На пешеходном переходе;
- Между зоной безопасности и прилегающим бордюром;
- Рядом с любой улицей или напротив нее выемка грунта или препятствие при остановке, стоянии или стоянке может затруднить движение;
- На мосту, эстакаде или в туннеле автомагистрали;
- На любых железнодорожных путях;
- На проезжей части с регулируемым подъездом;
- В промежутке между проезжей частью на разделенной автомобильной дороге, включая переходы;
- В любом месте, обозначенном знаком запрета на парковку.
Остановка, остановка или стоянка разрешены только на мгновение для посадки или высадки пассажиров при следующих условиях:
- Перед общественной или частной подъездной дорогой;
- В пределах 15 футов от пожарного крана;
- В пределах 20 футов от пешеходного перехода на перекрестке;
- В пределах 30 футов от знака остановки, знака уступки или сигнала управления движением;
- В пределах 20 футов от проезда к пожарной части;
- В пределах 75 футов от места через улицу от проезда к пожарной части;
- В пределах 50 футов от железнодорожного переезда;
- В любом месте, где стоять официальные знаки запрещают.
Управляйте маневром Сканцони
Клинический сценарий У вашей пациентки были длительные, медленные роды с болью преимущественно в спине (печально известные «спины»). Теперь она полностью расширена, и голова хорошо продвинулась в таз, но не венчает, и вы обнаружите, что при осмотре пациентка выделяется заднее правое положение затылка (OP). Пациент истощен. Она испробовала ряд физических маневров и рабочих позиций с минимальным прогрессом.Ручное вращение головы было неудачным. На этом этапе выбор — перейти к кесареву сечению или попробовать вращение Сканцони для поворота головы с помощью щипцов, при этом врачи помогают вращению в брюшной полости. В этом случае кесарево сечение менее желательно, поскольку головка заклинивает глубоко в тазу.
Пациент истощен. Она испробовала ряд физических маневров и рабочих позиций с минимальным прогрессом.Ручное вращение головы было неудачным. На этом этапе выбор — перейти к кесареву сечению или попробовать вращение Сканцони для поворота головы с помощью щипцов, при этом врачи помогают вращению в брюшной полости. В этом случае кесарево сечение менее желательно, поскольку головка заклинивает глубоко в тазу.
Маневр Сканцони был изобретен немецким акушером Фридрихом Вильгельмом Сканцони в 1849 году. Его метод изменения заднего предлежания на передний потребовал двойного использования щипцов в процессе родов. 1
Контекст Позиции OP являются наиболее распространенным типом неправильного положения, составляющим от 1% до 5%. 2 Они часто сопровождаются некоторой степенью отклонения, что приводит к большему внешнему диаметру. Наличие асинклитизма и плесени может затруднить правильное определение положения, что приводит к неточной диагностике переднего затылка (рис. 1). Факторы риска для положения OP включают меньшую емкость выходного отверстия таза, предшествующее OP, недоношенность, возраст матери> 35, гестационный возраст ≥41 недели, вес при рождении> 4000 г, искусственный разрыв плодных оболочек (AROM) и эпидуральную анестезию. 3 Положение ОП как причина стойкой дистоции родов может быть исправлено с помощью метода Сканцони, что обеспечивает успешные роды через естественные родовые пути.
1). Факторы риска для положения OP включают меньшую емкость выходного отверстия таза, предшествующее OP, недоношенность, возраст матери> 35, гестационный возраст ≥41 недели, вес при рождении> 4000 г, искусственный разрыв плодных оболочек (AROM) и эпидуральную анестезию. 3 Положение ОП как причина стойкой дистоции родов может быть исправлено с помощью метода Сканцони, что обеспечивает успешные роды через естественные родовые пути.
Все иллюстрации выполнены Alex Baker, DNA Illustration, Inc.
СЛЕДУЮЩИЙ: Иллюстрированная техника >>
Пинцет Использование для вращения Scanzoni — Tucker-McLane, в данном случае с модификацией Luikart.Щипцы Tucker-McLane имеют твердые, а не окончатые лезвия. Модификация Luikart — это псевдофенестрация. Что наиболее важно, в отличие от лезвий щипцов Симпсона с широко разделенными стержнями стержни щипцов Такера-Маклейна перекрываются. Это снижает риск разрыва при широком вращении при коррекции положения головы. В статье W Barth, MD, недавно опубликованной в Obstetrics & Gynecology, , описаны ротационные щипцы с использованием щипцов Kielland, за которыми следуют щипцы Simpson для вытяжения и доставки. 4 Мы считаем, что маневр Сканцони предпочтительнее для облегчения успешных родов ребенка с постоянной ОП. Мы отдаем предпочтение твердым псевдофенестрированным лезвиям щипцов Tucker-McLane с модификацией Luikart для простоты применения и обнаруживаем, что они приводят к меньшему количеству повреждений кожи лица плода.
По теме: Оперативные вагинальные роды: потерянное искусство?
Техника Для успешного завершения маневра Сканцони пациент должен находиться в положении для дорсальной литотомии.Вначале к голове прикладывают щипцы обычным способом: сначала кладут задний нож, а второй — передний. Лезвия должны быть ориентированы так, чтобы их тазовый изгиб был совмещен с изгибом материнского крестца, как при любом размещении щипцов. Затем лезвия шарнирно соединяются так, чтобы они перекрывали друг друга, а ручки сжимаются вместе, чтобы зафиксировать лезвия на месте вокруг головы, что устраняет асинклитизм (рис. 2А).
Все иллюстрации — Алекса Бейкера, DNA Illustration, Inc.
Следующая часть этого маневра начинается с использования щипцов, чтобы согнуть шейку плода и сместить деформированный череп. Стержни щипцов должны быть направлены по широкой дуге, начинающейся между 12 и 3 часами и заканчивающейся в 6 часах, по существу «вывинчивая» головку с помощью естественных сил сжатия, а также направленного вбок давления. на живот наносится ассистентом (рис. 2В 1,2).
Боковое давление служит для вращения плеча одновременно с головой.Угол голени по отношению к позвоночнику матери имеет решающее значение. Голени должны быть ориентированы почти вертикально, перпендикулярно позвоночнику матери, почти параллельно бедрам матери в положении для дорсальной литотомии. Именно этот широкий угол дает оператору необходимый крутящий момент и, что более важно, поддерживает сгибание шейки плода во время вращения. После завершения вращения лопасти необходимо поменять местами, чтобы выровнять их с тазовой кривой матери. Проще всего это делать между схватками (рис. 2С).Удаление и замена щипцов должны выполняться по изгибу лезвий, как и при любом маневре щипцами. Лезвие, которое теперь находится сзади, можно удалить и заменить внутри переднего лезвия. Затем переднее лезвие удаляется и заменяется задним. Постоянное удержание одного лезвия на месте приведет к наложению шины на голову в ее повернутом положении, предотвращая обратное вращение.
После завершения вращения лопасти необходимо поменять местами, чтобы выровнять их с тазовой кривой матери. Проще всего это делать между схватками (рис. 2С).Удаление и замена щипцов должны выполняться по изгибу лезвий, как и при любом маневре щипцами. Лезвие, которое теперь находится сзади, можно удалить и заменить внутри переднего лезвия. Затем переднее лезвие удаляется и заменяется задним. Постоянное удержание одного лезвия на месте приведет к наложению шины на голову в ее повернутом положении, предотвращая обратное вращение.
Наконец, можно переставить щипцы и использовать их для вывода головки к месту коронирования (рис. 2D).На этом этапе следует удалить лезвия, а голова и тело доставить с материнскими усилиями, чтобы избежать ненужных травм промежности. Ведение третьего периода родов можно проводить стандартным образом.
Иллюстрации Алекса Бейкера, DNA Illustration, Inc.
Ссылки
1. Merriam-Webster.com. Сканцони Маневр. http: //www.merriam-webster.com / medical / scanzoni% 20 маневр. Проверено 20 апреля 2015 г.
Merriam-Webster.com. Сканцони Маневр. http: //www.merriam-webster.com / medical / scanzoni% 20 маневр. Проверено 20 апреля 2015 г.
2. Sizer AR, Nirmal DM. Затылочно-заднее положение: сопутствующие факторы и акушерский исход у первородящих. Акушерский гинекол . 2000. 96 (5): 749–752.
3. Cheng YW, Shaffer BL, Caughey AB. Сопутствующие факторы и исходы стойкого заднего положения затылка: ретроспективное когортное исследование с 1976 по 2001 год. J Matern Fetal Neonatal Med . т в 2006 г .; 19 (9): 563–568.
4. Барт В. Упорный задний затылок. Акушерский гинекол . 2015; 125 (3): 695–709.
ПРОФИЛЬ МИССИИ
В стартовой конфигурации орбитальный аппарат и два твердотопливных ракетных ускорителя прикреплены к внешнему резервуару в вертикальном (нос вверх) положении на стартовой площадке. Каждый твердотопливный ракетный ускоритель прикреплен своей кормовой юбкой к платформе мобильной пусковой установки четырьмя болтами. Аварийный выход летного экипажа на стартовую площадку за 30 секунд до старта осуществляется по тросу. Есть семь проводов скольжения длиной 1200 футов, каждый с одной корзиной.Каждая корзина рассчитана на трех человек. Корзины диаметром 5 футов и глубиной 42 дюйма подвешены под механизмом скольжения на четырех тросах. Слайдеры переносят корзины на уровень земли. Покинув корзину на уровне земли, летный экипаж переходит в бункер, предназначенный для защиты от взрыва на стартовой площадке.
Есть семь проводов скольжения длиной 1200 футов, каждый с одной корзиной.Каждая корзина рассчитана на трех человек. Корзины диаметром 5 футов и глубиной 42 дюйма подвешены под механизмом скольжения на четырех тросах. Слайдеры переносят корзины на уровень земли. Покинув корзину на уровне земли, летный экипаж переходит в бункер, предназначенный для защиты от взрыва на стартовой площадке.
При запуске сначала зажигаются три главных двигателя космического челнока, питаемые жидким водородным топливом и жидким окислителем кислорода из внешнего бака.Когда проверено, что двигатели работают на должном уровне тяги, отправляется сигнал на зажигание твердотопливных ракетных ускорителей. При надлежащем соотношении тяги к массе инициаторы (небольшие взрывчатые вещества) на восьми прижимных болтах на твердотопливных ракетных ускорителях запускаются, чтобы освободить космический шаттл для взлета. Все это занимает всего несколько секунд.
Максимальное динамическое давление достигается в начале подъема, обычно примерно через 60 секунд после отрыва.
Примерно через минуту (две минуты после начала фазы всплытия) два твердотопливных ракетных ускорителя израсходовали топливо и были выброшены из внешнего бака.Это запускается сигналом разделения с орбитального аппарата.
Ракеты-носители на короткое время продолжают подниматься, а запускаются небольшие моторы, унося их прочь от космического корабля. Затем ускорители поворачиваются и опускаются, и на заданной высоте раскрываются парашюты, чтобы замедлить их для безопасного приводнения в океане. Обводнение происходит примерно в 141 морской миле (162 статутных милях) от места запуска. Бустеры восстанавливаются и используются повторно.
Тем временем орбитальный аппарат и внешний бак продолжают подниматься, используя тягу трех главных двигателей космического корабля.Приблизительно через восемь минут после запуска и почти до орбитальной скорости три двигателя космического челнока выключаются (отключение главного двигателя), а внешний резервуар сбрасывается по команде с орбитального корабля.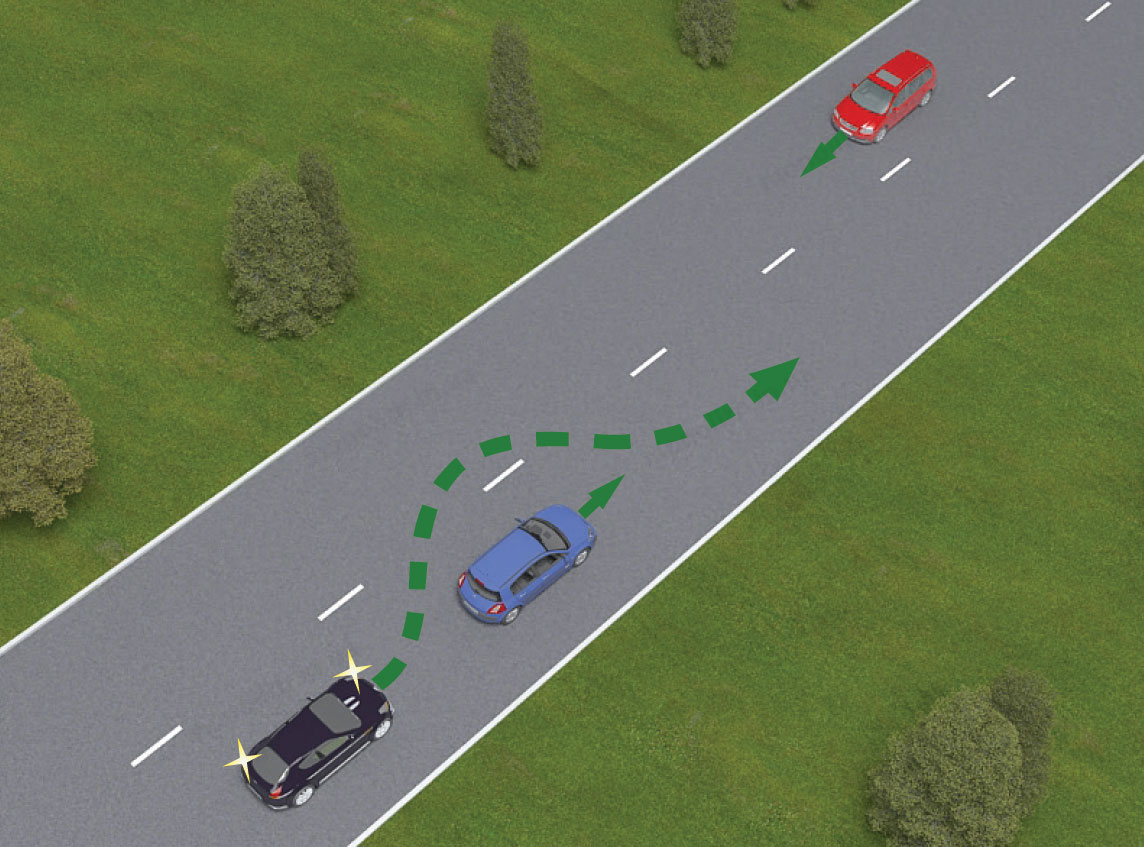
Двигатели системы управления реакцией вперед и назад обеспечивают ориентацию (тангаж, рыскание и крен) и перевод орбитального корабля от внешнего резервуара при разделении и возвращении в режим удержания ориентации перед маневром толчка орбитальной системы маневрирования.
Внешний резервуар продолжает движение по баллистической траектории и входит в атмосферу, где разрушается.Его прогнозируемое воздействие будет в Индийском океане (за исключением наклона 57 градусов) в случае экваториальных орбит (Космический центр Кеннеди, запуск) и в южной части Тихого океана в случае запуска базы ВВС Ванденберг.
Обычно два маневра тяги с использованием двух двигателей системы орбитального маневрирования в кормовой части орбитального аппарата используются в двухэтапной последовательности тяги: для завершения вывода на околоземную орбиту и для округления орбиты космического корабля. Двигатели системы орбитального маневрирования также используются на орбите для любых значительных изменений скорости.
В случае миссии прямого ввода используется только одна последовательность толчков орбитальной системы маневрирования.
Высота орбиты миссии зависит от этой миссии. Номинальная высота может варьироваться от 100 до 217 морских миль (от 115 до 250 статутных миль).
Двигатели (двигатели) системы управления реакцией вперед и назад обеспечивают управление ориентацией орбитального аппарата, а также любые незначительные маневры поступательного движения вдоль заданной оси на орбите.
По завершении орбитальных операций орбитальный аппарат ориентируется системой управления реакцией хвостом вперед.Два двигателя системы орбитального маневрирования получают команду замедлить орбитальный аппарат для ухода с орбиты.
Система управления реакцией поворачивает нос орбитального корабля вперед для входа. Система управления реакцией управляет орбитальным аппаратом до тех пор, пока плотность атмосферы не станет достаточной для того, чтобы аэродинамические поверхности управления по тангажу и крену стали эффективными.
Считается, что вход в зону происходит на высоте 400 000 футов примерно в 4 400 морских миль (5 063 статутных мили) от места посадки и со скоростью примерно 25 000 футов в секунду.
На высоте 400000 футов орбитальный аппарат маневрирует до нулевого градуса по крену и рысканью (уровень крыльев) и под заранее определенным углом атаки для входа. Угол атаки 40 градусов. Система управления полетом выдает команды реактивным самолетам системы управления реакцией на крен, тангаж и рыскание для демпфирования скорости.
Двигатели системы управления реакцией в прямом направлении блокируются до входа в соприкосновение, а двигатели системы управления реакцией в задней части маневрируют космическим кораблем до тех пор, пока не будет обнаружено динамическое давление в 10 фунтов на квадратный фут, когда начинают действовать элероны орбитального корабля.Затем отключаются двигатели по крену системы управления реакцией на корму. При динамическом давлении 20 фунтов на квадратный фут включаются лифты орбитального аппарата и отключаются двигатели тангажа кормовой системы управления реакцией. Тормоз скорости орбитального аппарата используется ниже 10 Маха, чтобы вызвать более положительное отклонение триммера руля высоты вниз. Приблизительно на скорости 3,5 Маха включается руль направления, а двигатели рыскания системы управления реакцией кормы отключаются на высоте 45 000 футов.
Тормоз скорости орбитального аппарата используется ниже 10 Маха, чтобы вызвать более положительное отклонение триммера руля высоты вниз. Приблизительно на скорости 3,5 Маха включается руль направления, а двигатели рыскания системы управления реакцией кормы отключаются на высоте 45 000 футов.
Направление входа должно рассеивать огромное количество энергии, которым орбитальный аппарат обладает, когда он входит в атмосферу Земли, чтобы гарантировать, что орбитальный аппарат не сгорит (угол входа слишком большой) или не вылетит из атмосферы (угол входа слишком мал) и что орбитальный аппарат не сгорит. правильно расположен для достижения желаемой точки приземления.
Во время входа энергия рассеивается атмосферным сопротивлением поверхности орбитального корабля. Более высокие уровни сопротивления атмосферы позволяют быстрее рассеивать энергию с более крутой траекторией. Обычно угол атаки и угол крена позволяют контролировать атмосферное сопротивление любого летательного аппарата. Однако для орбитального аппарата угол атаки был отклонен, поскольку он создает температуру поверхности выше проектной спецификации. Угол атаки, запланированный во время входа, загружается в компьютеры орбитального корабля как функция относительной скорости, оставляя угол крена для управления энергией.Увеличение угла крена уменьшает вертикальную составляющую подъемной силы, вызывая более высокую скорость снижения и скорость рассеивания энергии. Увеличение скорости крена действительно повышает температуру поверхности орбитального корабля, но не так сильно, как команда равного угла атаки.
Однако для орбитального аппарата угол атаки был отклонен, поскольку он создает температуру поверхности выше проектной спецификации. Угол атаки, запланированный во время входа, загружается в компьютеры орбитального корабля как функция относительной скорости, оставляя угол крена для управления энергией.Увеличение угла крена уменьшает вертикальную составляющую подъемной силы, вызывая более высокую скорость снижения и скорость рассеивания энергии. Увеличение скорости крена действительно повышает температуру поверхности орбитального корабля, но не так сильно, как команда равного угла атаки.
Если у орбитального аппарата мало энергии (текущий запас хода намного больше номинального при текущей скорости), управление входом будет ниже номинального уровня сопротивления. Если орбитальный аппарат имеет слишком много энергии (текущий запас хода намного меньше номинального при текущей скорости), управление входом будет указывать на уровни сопротивления выше номинала для рассеивания дополнительной энергии.
Угол крена используется для контроля поперечного диапазона. Ошибка азимута — это угол между плоскостью, содержащей вектор положения орбитального аппарата, и точкой касания цилиндра выравнивания курса, и плоскостью, содержащей вектор положения и вектор скорости орбитального аппарата. Когда ошибка азимута превышает загруженное компьютером число, угол крена орбитального аппарата меняется на противоположный.
Таким образом, скорость снижения и снижение определяется углом крена. Чем круче угол крена, тем больше скорость снижения и больше сопротивление.И наоборот, минимальное лобовое сопротивление — это уровень крыльев. Перекрестный диапазон контролируется разворотами банка.
Фаза терморегулирования на входе предназначена для поддержания температуры тыльной поверхности в пределах проектных ограничений. Устанавливается постоянная скорость нагрева до уровня ниже 19 000 футов в секунду.
Равновесная фаза скольжения переводит орбитальный аппарат с быстро возрастающих уровней сопротивления фазы контроля температуры на постоянный уровень сопротивления фазы постоянного сопротивления. Равновесный глиссадный полет определяется как полет, в котором угол траектории полета, угол между местной горизонталью и локальным вектором скорости, остается постоянным.Равновесный глиссадный полет обеспечивает максимальную дальность полета. Это длится до тех пор, пока ускорение сопротивления не достигнет 33 футов в секунду в квадрате.
Равновесный глиссадный полет определяется как полет, в котором угол траектории полета, угол между местной горизонталью и локальным вектором скорости, остается постоянным.Равновесный глиссадный полет обеспечивает максимальную дальность полета. Это длится до тех пор, пока ускорение сопротивления не достигнет 33 футов в секунду в квадрате.
С этого момента начинается фаза постоянного сопротивления. Угол атаки изначально составляет 40 градусов, но к концу этой фазы он начинает снижаться примерно до 36 градусов.
В переходной фазе угол атаки продолжает снижаться, достигая примерно 14-градусного угла атаки на интерфейсе управления энергопотреблением в зоне входного терминала на высоте примерно 83000 футов, 2500 футов в секунду, скорость 2 Маха.5 и 52 морские мили (59 статутных миль) от взлетно-посадочной полосы. Затем управление передается системе наведения TAEM.
Во время описанных фаз входа команды крена орбитального аппарата удерживают орбитальный аппарат на профиле сопротивления и контролируют диапазон пересечения.
Система наведения TAEM направляет орбитальный аппарат к ближайшему из двух цилиндров выравнивания курса, радиус которых составляет приблизительно 18 000 футов и который расположен по касательной к осевой линии взлетно-посадочной полосы и по обе стороны от нее на подходном конце. В наведении TAEM избыточная энергия рассеивается с помощью S-поворота; а скоростной тормоз можно использовать для изменения лобового сопротивления, подъемной силы и угла траектории полета в условиях высокой энергии.Это увеличивает дальность слежения за землей по мере того, как орбитальный аппарат поворачивается от ближайшего HAC, пока не рассеется достаточно энергии, чтобы обеспечить нормальный захват фазы наведения и захода на посадку, который начинается на высоте 10 000 футов. Орбитальный аппарат также может лететь со скоростью, близкой к скорости, обеспечивающей максимальную подъемную силу над сопротивлением, или на уровне крыльев для случая увеличения дальности. Космический корабль замедляется до дозвуковой скорости на высоте примерно 49 000 футов, примерно в 22 морских милях (25,3 статутных миль) от места посадки.
При обнаружении TAEM орбитальный аппарат поворачивается до тех пор, пока он не нацеливается на точку, касающуюся ближайшего HAC, и продолжает движение, пока не достигнет точки пути 1.На WP-1 начинается фаза согласования курса TAEM. HAC отслеживается до тех пор, пока не будет достигнуто выравнивание взлетно-посадочной полосы плюс-минус 20 градусов. В предфинальной фазе TAEM орбитальный аппарат покидает HAC; наклоняется, чтобы получить крутой глиссадный спуск; увеличивает скорость полета; банки для приобретения осевой линии взлетно-посадочной полосы; и продолжается до тех пор, пока не выйдет на осевую линию взлетно-посадочной полосы, на внешнем глиссаде и на воздушной скорости. Фаза захода на посадку и наведения на посадку начинается с завершения предварительной фазы TAEM и заканчивается, когда космический корабль полностью останавливается на взлетно-посадочной полосе.
Фаза захвата траектории захода на посадку и посадки начинается на интерфейсе TAEM и продолжается до захвата наведения на крутом внешнем глиссаде. Фаза захода на посадку и приземления начинается на высоте около 10 000 футов при эквивалентной воздушной скорости 290 плюс-минус 12 узлов в 6,9 морских миль (7,9 статутных миль) от точки приземления. В этот момент включается автоматическое наведение на посадку, чтобы направить орбитальный аппарат на глиссаду от минус 19 до 17 градусов (что более чем в семь раз больше, чем у коммерческого авиалайнера), нацеленного на цель 0.86 морских миль (1 статутная миля) перед взлетно-посадочной полосой. Тормоз скорости космического корабля расположен так, чтобы поддерживать правильную скорость. Скорость снижения на более позднем этапе TAEM, а также захода на посадку и приземления превышает 10 000 футов в минуту (скорость снижения примерно в 20 раз выше, чем стандартный угол захода на посадку по приборам 3 градуса коммерческого авиалайнера).
Фаза захода на посадку и приземления начинается на высоте около 10 000 футов при эквивалентной воздушной скорости 290 плюс-минус 12 узлов в 6,9 морских миль (7,9 статутных миль) от точки приземления. В этот момент включается автоматическое наведение на посадку, чтобы направить орбитальный аппарат на глиссаду от минус 19 до 17 градусов (что более чем в семь раз больше, чем у коммерческого авиалайнера), нацеленного на цель 0.86 морских миль (1 статутная миля) перед взлетно-посадочной полосой. Тормоз скорости космического корабля расположен так, чтобы поддерживать правильную скорость. Скорость снижения на более позднем этапе TAEM, а также захода на посадку и приземления превышает 10 000 футов в минуту (скорость снижения примерно в 20 раз выше, чем стандартный угол захода на посадку по приборам 3 градуса коммерческого авиалайнера).
На высоте 1750 футов над уровнем земли запускается предварительный маневр для установки космического корабля на глиссадный уклон 1,5 градуса для подготовки к посадке с установленным тормозом скорости, как требуется. В этот момент летный экипаж разворачивает шасси.
Заключительная фаза снижает скорость снижения космического корабля до менее 9 футов в секунду. Приземление происходит примерно на 2500 футов за порог взлетно-посадочной полосы на скорости от 184 до 196 узлов (от 213 до 226 миль в час).
АБОРТ
- Выбор режима прерывания всплытия может оказаться необходимым в случае отказа, который влияет на характеристики корабля, например, отказ главного двигателя космического челнока или системы орбитального маневрирования.Другие отказы, требующие досрочного прекращения полета, такие как утечка в салоне, могут потребовать выбора режима прерывания.
Существует два основных типа режимов прерывания всплытия для миссий космических шаттлов: неповрежденные прерывания и аварийные прерывания. Неповрежденные прерывания призваны обеспечить безопасное возвращение орбитального аппарата к запланированной площадке посадки. Аварийные аварийные прерывания предназначены для обеспечения выживания летного экипажа после более серьезных аварий, когда аварийное прерывание невозможно. Аварийное прерывание обычно приводит к операции по смыванию канавы.
Аварийное прерывание обычно приводит к операции по смыванию канавы.
Есть четыре типа неповрежденных прерываний: прерывание выхода на орбиту, прерывание одного полета, трансатлантическая посадка и возвращение на стартовую площадку.
Режим ATO разработан, чтобы позволить аппарату выйти на временную орбиту ниже номинальной. Этот режим требует меньшей производительности и дает время на оценку проблем, а затем выбор либо маневр раннего ухода с орбиты, либо маневр толчка системы орбитального маневрирования, чтобы поднять орбиту и продолжить миссию.
AOA разработан, чтобы позволить аппарату один раз облететь Землю и совершить нормальный вход и посадку.Этот режим обычно включает две последовательности движения системы орбитального маневрирования, при этом вторая последовательность представляет собой маневр ухода с орбиты. Последовательность ввода будет аналогична обычной записи.
Режим TAL предназначен для обеспечения неповрежденной посадки на другой стороне Атлантического океана. В этом режиме создается баллистическая траектория, которая не требует маневра системы орбитального маневрирования.
В этом режиме создается баллистическая траектория, которая не требует маневра системы орбитального маневрирования.
Режим RTLS включает в себя полет вниз по дальности для рассеивания топлива, а затем разворот под действием мощности, чтобы вернуться непосредственно на посадку на месте запуска или рядом с ним.
Существует определенный порядок предпочтения различных режимов прерывания. Тип отказа и время отказа определяют, какой тип прерывания будет выбран. В случаях, когда потеря производительности является единственным фактором, предпочтительными режимами будут ATO, AOA, TAL и RTLS в указанном порядке. Выбранный режим является наивысшим из тех, которые могут быть выполнены с оставшимися характеристиками автомобиля. В случае некоторых сбоев системы поддержки, таких как утечки в кабине или проблемы с охлаждением автомобиля, предпочтительным режимом может быть тот, который завершит миссию наиболее быстро.В этих случаях TAL или RTLS могут быть предпочтительнее AOA или ATO. Аварийное прерывание никогда не выбирается, если существует другой вариант прерывания.
Центр управления полетами в Хьюстоне является основным для вызова этих прерываний, потому что он имеет более точное знание положения орбитального корабля, чем экипаж может получить из бортовых систем. Перед выключением главного двигателя Центр управления полетами периодически звонит экипажу, чтобы сообщить им, какой режим прерывания доступен (или нет). В случае потери наземной связи у летного экипажа есть бортовые методы, такие как подсказки, специальные дисплеи и отображаемая информация, чтобы определить текущую область прерывания.
Какой режим прерывания выбран, зависит от причины и времени отказа, вызвавшего прерывание, и какой режим является наиболее безопасным или улучшает успех миссии. Если проблема заключается в отказе главного двигателя космического челнока, летный экипаж и Центр управления полетами выбирают лучший вариант, доступный на тот момент, когда выходит из строя главный двигатель космического корабля.
Если проблема заключается в системном сбое, которое ставит под угрозу транспортное средство, выбирается самый быстрый режим прерывания, который приводит к самой ранней посадке транспортного средства. RTLS и TAL — самые быстрые варианты (35 минут), тогда как AOA требует примерно 90 минут. Какой из них будет выбран, зависит от времени отказа трех исправных главных двигателей космического корабля.
RTLS и TAL — самые быстрые варианты (35 минут), тогда как AOA требует примерно 90 минут. Какой из них будет выбран, зависит от времени отказа трех исправных главных двигателей космического корабля.
Летный экипаж выбирает режим прерывания, устанавливая переключатель режима прерывания и нажимая кнопку прерывания.
ВОЗВРАТ НА ЗАПУСК САЙТА ОБЗОР
- Режим прерывания RTLS разработан, чтобы позволить возвращение орбитального аппарата, экипажа и полезной нагрузки на стартовую площадку, Космический центр Кеннеди.примерно через 25 минут после старта. Профиль RTLS предназначен для компенсации потери тяги от одного главного двигателя космического челнока между стартом и примерно четырьмя минутами 20 секундами, когда остается недостаточно топлива главной двигательной установки для возврата на место запуска.
Можно считать, что RTLS состоит из трех ступеней: ступени с приводом, во время которой главные двигатели космического корабля все еще работают; фаза отделения ET; и фаза планирования, во время которой орбитальный аппарат приближается к посадке в Космическом центре Кеннеди. Этап включения RTLS начинается с выбора экипажем прерывания RTLS, которое выполняется после отделения твердотопливного ракетного ускорителя. Бригада выбирает режим прерывания, устанавливая поворотный переключатель прерывания в положение RTLS и нажимая кнопку прерывания. Время, в которое выбирается RTLS, зависит от причины прерывания. Например, трехмоторный RTLS выбирается в последний момент, примерно через три минуты 34 секунды после начала миссии; в то время как RTLS, выбранный из-за того, что двигатель не работает при старте, выбирается в самое раннее время, примерно через две минуты 20 секунд после начала миссии (после отделения твердотопливной ракеты-носителя).
Этап включения RTLS начинается с выбора экипажем прерывания RTLS, которое выполняется после отделения твердотопливного ракетного ускорителя. Бригада выбирает режим прерывания, устанавливая поворотный переключатель прерывания в положение RTLS и нажимая кнопку прерывания. Время, в которое выбирается RTLS, зависит от причины прерывания. Например, трехмоторный RTLS выбирается в последний момент, примерно через три минуты 34 секунды после начала миссии; в то время как RTLS, выбранный из-за того, что двигатель не работает при старте, выбирается в самое раннее время, примерно через две минуты 20 секунд после начала миссии (после отделения твердотопливной ракеты-носителя).
После выбора RTLS транспортное средство продолжает спускаться вниз, чтобы рассеять избыточное топливо главной двигательной установки. Цель состоит в том, чтобы оставить достаточно топлива для главной двигательной установки, чтобы иметь возможность развернуть транспортное средство, полететь обратно к Космическому центру Кеннеди. И добиться надлежащих условий отключения главного двигателя, чтобы транспортное средство могло планировать к Космическому центру Кеннеди. После внешнего бака. разделение. Во время фазы снижения дальности инициируется маневр по тангажу (время частично зависит от времени отказа главного двигателя космического челнока), чтобы ориентировать конфигурацию орбитального аппарата / внешнего резервуара в положение «голова вверх», указывая на место запуска.В это время аппарат все еще удаляется от стартовой площадки, но главные двигатели космического челнока теперь работают с тягой, чтобы обнулить скорость вниз по дальности. Кроме того, избыточное топливо системы орбитального маневрирования и системы управления реакцией сбрасывается с помощью системы непрерывного орбитального маневрирования и тяги двигателя системы управления реакцией, чтобы улучшить вес орбитального корабля и центр тяжести для фазы планирования и посадки.
И добиться надлежащих условий отключения главного двигателя, чтобы транспортное средство могло планировать к Космическому центру Кеннеди. После внешнего бака. разделение. Во время фазы снижения дальности инициируется маневр по тангажу (время частично зависит от времени отказа главного двигателя космического челнока), чтобы ориентировать конфигурацию орбитального аппарата / внешнего резервуара в положение «голова вверх», указывая на место запуска.В это время аппарат все еще удаляется от стартовой площадки, но главные двигатели космического челнока теперь работают с тягой, чтобы обнулить скорость вниз по дальности. Кроме того, избыточное топливо системы орбитального маневрирования и системы управления реакцией сбрасывается с помощью системы непрерывного орбитального маневрирования и тяги двигателя системы управления реакцией, чтобы улучшить вес орбитального корабля и центр тяжести для фазы планирования и посадки.
Транспортное средство достигнет желаемой точки отключения основного двигателя, при этом во внешнем баке останется менее 2 процентов избыточного топлива.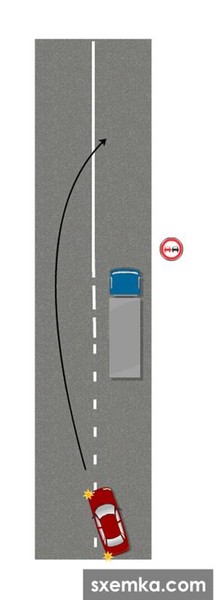 При выключении главного двигателя минус 20 секунд маневр с понижением тангажа (называемый понижением по тангажу) приводит сопряженную машину к требуемому внешнему отделению танка и скорости тангажа. После подачи команды на отключение главного двигателя начинается последовательность отделения внешнего танка, включая перевод системы управления реакцией, которая гарантирует, что орбитальный аппарат не повторно контактирует с внешним танком и что орбитальный аппарат достиг необходимого положения тангажа, чтобы начать фазу планирования RTLS. .
При выключении главного двигателя минус 20 секунд маневр с понижением тангажа (называемый понижением по тангажу) приводит сопряженную машину к требуемому внешнему отделению танка и скорости тангажа. После подачи команды на отключение главного двигателя начинается последовательность отделения внешнего танка, включая перевод системы управления реакцией, которая гарантирует, что орбитальный аппарат не повторно контактирует с внешним танком и что орбитальный аппарат достиг необходимого положения тангажа, чтобы начать фазу планирования RTLS. .
После того, как маневр перемещения системы управления реакцией завершен, начинается фаза скольжения RTLS.С этого момента RTLS обрабатывается так же, как и обычная запись.
ОБЗОР ПРЕРЫВАНИЯ ТРАНСАТЛАНТИЧЕСКОЙ ПОСАДКИ
- Режим прерывания TAL был разработан для улучшения возможностей, доступных при выходе из строя главного двигателя космического челнока после последней возможности RTLS, но до того, как в первый раз AOA может быть выполнено только с двумя главными двигателями космического корабля или при крупном отказе системы орбитального корабля, для Например, большая утечка давления в кабине или отказ системы охлаждения происходит после последней возможности RTLS, поэтому необходимо как можно быстрее приземлиться.

При прерывании TAL автомобиль продолжает движение по баллистической траектории через Атлантический океан, чтобы приземлиться на заданной взлетно-посадочной полосе. Посадка происходит примерно через 45 минут после запуска. Место посадки выбирается рядом с номинальной траекторией подъема орбитального аппарата, чтобы максимально эффективно использовать топливо главного двигателя космического корабля. Место посадки также должно иметь необходимую длину взлетно-посадочной полосы, погодные условия и разрешение Госдепартамента США. В настоящее время для запуска на восток определены три точки приземления: Морон, Испания; Дакар, Сенегал; и Бен-Герур, Марокко (на западном побережье Африки).
Чтобы выбрать режим прерывания TAL, экипаж должен установить поворотный переключатель прерывания в положение TAL / AOA и нажать кнопку прерывания перед выключением основного двигателя. (Нажатие на нее после выключения основного двигателя выбирает режим прерывания AOA.) Режим прерывания TAL начинает посылать команды для направления транспортного средства к плоскости места посадки. Он также подбрасывает аппарат перед выключением главного двигателя и посылает команды на начало сброса топлива системы орбитального маневрирования (сжигая топливо через двигатели системы орбитального маневрирования и двигатели системы управления реакцией).Этот отвал необходим для увеличения производительности транспортного средства (за счет уменьшения веса), для размещения центра тяжести в надлежащем месте для управления транспортным средством и для уменьшения посадочной массы транспортного средства.
Он также подбрасывает аппарат перед выключением главного двигателя и посылает команды на начало сброса топлива системы орбитального маневрирования (сжигая топливо через двигатели системы орбитального маневрирования и двигатели системы управления реакцией).Этот отвал необходим для увеличения производительности транспортного средства (за счет уменьшения веса), для размещения центра тяжести в надлежащем месте для управления транспортным средством и для уменьшения посадочной массы транспортного средства.
TAL обрабатывается как номинальная запись.
ОТКАЗ ОТ ОРБИТЫ ОБЗОР
- ATO — это режим прерывания, используемый для поднятия орбитального аппарата до безопасной орбитальной высоты, когда характеристики были потеряны и невозможно достичь запланированной орбитальной высоты. Если главный двигатель космического челнока выходит из строя в регионе, что приводит к отключению главного двигателя из-за снижения скорости, Центр управления полетами определит, что необходим режим прерывания, и проинформирует экипаж.
 Двигатели системы орбитального маневрирования будут использоваться для вывода орбитального аппарата на круговую орбиту.
Двигатели системы орбитального маневрирования будут использоваться для вывода орбитального аппарата на круговую орбиту.ОБЗОР ПРЕРЫВАНИЯ ОДИН РАЗ
- Режим прерывания AOA используется в тех случаях, когда характеристики корабля были потеряны до такой степени, что либо невозможно достичь жизнеспособной орбиты, либо недостаточно топлива системы орбитального маневрирования, доступного для выполнения системы орбитального маневрирования, толкающего маневр для размещения орбитального корабля. на орбите и маневр ухода с орбиты.Кроме того, AOA используется в случаях, когда из-за серьезной системной проблемы (утечка в кабине, потеря охлаждения) необходимо быстро приземлиться. В режиме прерывания AOA выполняется одна последовательность толчка системы орбитального маневрирования для корректировки орбиты после отключения главного двигателя, так что вторая последовательность толчка системы орбитального маневрирования приведет к смещению с орбиты и посадке корабля в месте посадки AOA (Уайт-Сэндс, Нью-Мексико; База ВВС Эдвардс или Космический центр Кеннеди .
После выполнения последовательности сброса с орбиты летный экипаж вылетает на посадку в запланированном месте так же, как при номинальном входе.
ОБЗОР ПРЕРЫВАНИЯ НЕПРЕРЫВНЫХ СЛУЧАЕВ
- Непредвиденные прерывания вызваны выходом из строя более чем одного главного двигателя или отказами других систем. Выход из строя одного главного двигателя, когда другой застревает на низкой настройке тяги, также может потребовать аварийного прерывания. Такое прерывание будет поддерживать целостность орбитального аппарата для ухода экипажа в полете, если посадка не может быть достигнута на подходящей посадочной площадке.
Аварийные прерывания из-за сбоев системы, отличных от тех, которые связаны с основными двигателями, обычно приводят к восстановлению неповрежденного транспортного средства и экипажа. Потеря более одного главного двигателя может, в зависимости от времени отказа двигателя, привести к безопасной посадке на взлетно-посадочную полосу.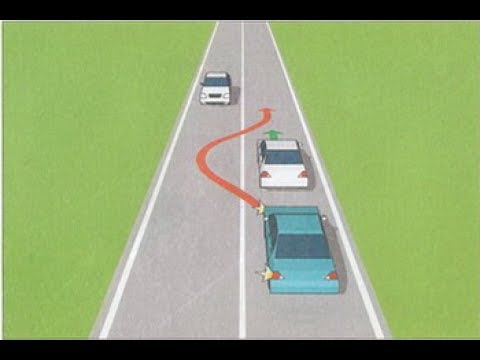 Однако в большинстве случаев с отключением трех двигателей во время всплытия орбитальный аппарат придется выбросить. Система спасения экипажа в полете будет использоваться перед тем, как покинуть орбитальный аппарат.
Однако в большинстве случаев с отключением трех двигателей во время всплытия орбитальный аппарат придется выбросить. Система спасения экипажа в полете будет использоваться перед тем, как покинуть орбитальный аппарат.
ОБОРУДОВАНИЕ НА ЗЕМЛЮ
- Операции по восстановлению космических кораблей на номинальной площадке для посадки в конце миссии поддерживают около 160 членов группы по запуску космических кораблей.Члены наземной группы в автономных комбинезонах защиты от атмосферных воздействий, защищающие их от токсичных химикатов, приближаются к космическому кораблю, как только он прекращает движение. Члены наземной группы проводят измерения датчиков, чтобы убедиться, что атмосфера в непосредственной близости от космического корабля не взрывоопасна. В случае утечки топлива грузовик с ветряной машиной с большим вентилятором будет перемещен в зону, чтобы создать турбулентный воздушный поток, который снизит концентрацию газа и снизит вероятность взрыва.
Блок продувки системы кондиционирования наземного оборудования прикреплен к правому шлангокабелю Т-0 орбитального корабля, так что холодный воздух может направляться через задний фюзеляж орбитального аппарата, отсек полезной нагрузки, носовой фюзеляж, крылья, вертикальный стабилизатор и орбитальную систему маневрирования / реакции.![]() стручки системы управления для рассеивания тепла входа.
стручки системы управления для рассеивания тепла входа.
Второй блок наземного охлаждения наземного вспомогательного оборудования соединен с контурами фреонового охладителя левого орбитального аппарата Т-0 для шлангокабеля космического корабля для обеспечения охлаждения летного экипажа и авионики во время посадки и проверки системы.Топливные элементы космического корабля в это время остаются включенными. Затем летный экипаж выйдет из космического корабля, а наземный экипаж отключит питание космического корабля.
В Космическом центре Кеннеди. колонна орбитального аппарата и наземного вспомогательного оборудования перемещается с взлетно-посадочной полосы в центр обработки орбитального аппарата.
Если космический корабль приземляется на базе ВВС Эдвардс, используются те же процедуры и наземное вспомогательное оборудование, что и в Космическом центре Кеннеди, после того, как орбитальный аппарат остановился на взлетно-посадочной полосе.Колонна с орбитальным аппаратом и наземным вспомогательным оборудованием перемещается с взлетно-посадочной полосы на объект помощника и десанта орбитального аппарата на базе ВВС Эдвардс. После детального осмотра космический корабль готов к переправке на борт самолета-носителя шаттла с базы ВВС Эдвардс в Космический центр Кеннеди. Для перегонки над кормовой частью орбитального корабля устанавливается хвостовой обтекатель.
После детального осмотра космический корабль готов к переправке на борт самолета-носителя шаттла с базы ВВС Эдвардс в Космический центр Кеннеди. Для перегонки над кормовой частью орбитального корабля устанавливается хвостовой обтекатель.
В случае посадки в другом месте, экипаж из восьми человек переместится на место посадки, чтобы помочь экипажу астронавтов подготовить орбитальный аппарат к загрузке на борт самолета-носителя шаттла для транспортировки обратно в Космический центр Кеннеди.Для посадки за пределами США персонал на местах аварийной посадки будет проходить минимальную подготовку по безопасному обращению с орбитальным аппаратом с упором на обучение аварийно-спасательным работам, буксировку орбитального аппарата в безопасную зону и предотвращение возгорания ракетного топлива.
По возвращении в Цех обработки орбитального аппарата в Космическом центре Кеннеди. орбитальный аппарат находится в безопасном состоянии (боеприпасы сохранены), полезная нагрузка (если таковая имеется) удаляется, а отсек полезной нагрузки орбитального аппарата перенастраивается из предыдущей миссии для следующей миссии.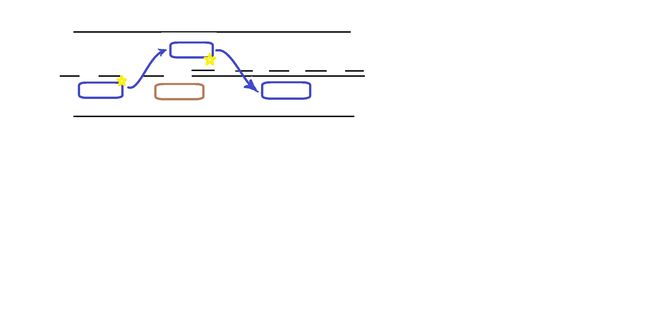 Любое необходимое обслуживание и проверки также выполняются, пока орбитальный аппарат находится на ОБТК. Полезная нагрузка для следующей миссии орбитального аппарата может быть установлена в отсеке полезной нагрузки орбитального аппарата на ОБТК или может быть установлена в отсеке полезной нагрузки, когда орбитальный аппарат находится на стартовой площадке.
Любое необходимое обслуживание и проверки также выполняются, пока орбитальный аппарат находится на ОБТК. Полезная нагрузка для следующей миссии орбитального аппарата может быть установлена в отсеке полезной нагрузки орбитального аппарата на ОБТК или может быть установлена в отсеке полезной нагрузки, когда орбитальный аппарат находится на стартовой площадке.
Затем космический корабль буксируется в корпус сборки автомобилей и стыкуется с внешним баком. Внешний бак и твердотопливные ракетные ускорители штабелируются и соединяются на платформе мобильной пусковой установки, пока орбитальный аппарат находится на ремонте.Установлены соединения с орбитальным аппаратом космического челнока, интегрированный аппарат проверяется и устанавливается боеприпас.
Платформа мобильной пусковой установки перемещает всю систему космического челнока на четырех гусеницах к стартовой площадке, где устанавливаются соединения и начинаются работы по обслуживанию и проверке. Если полезная нагрузка не была установлена на ОБТК, она будет установлена на стартовой площадке с последующими предпусковыми работами.
Для запуска космических челноков с базы ВВС Ванденберг будет использоваться стартовый комплекс Ванденберг (SL6), который был построен, но никогда не использовался для программы пилотируемых орбитальных лабораторий.Этот объект был модифицирован для использования в космической транспортной системе.
Взлетно-посадочная полоса в Ванденберге была усилена и удлинена с 8000 футов до 12000 футов, чтобы принять орбитальный аппарат, возвращающийся из космоса.
Когда орбитальный аппарат приземляется на базе ВВС Ванденберг, используются те же процедуры, наземное вспомогательное оборудование и конвой, что и в Космическом центре Кеннеди. После того, как орбитальный аппарат останавливается на взлетно-посадочной полосе. Орбитальный аппарат и наземное вспомогательное оборудование перемещаются с взлетно-посадочной полосы в пункт обслуживания и проверки орбитального аппарата на базе ВВС Ванденберг.Процедуры обработки данных орбитального аппарата, используемые на этом объекте, аналогичны тем, которые используются на ОБТК Космического центра Кеннеди.
Создание космических шаттлов в Ванденберге отличается от таковых в Космическом центре Кеннеди тем, что космический корабль встроен в стартовую площадку. Орбитальный аппарат буксируется по суше от пункта обслуживания и проверки орбитального аппарата в Ванденберге до пункта запуска SL6.
SL6 включает в себя стартовую установку, башню доступа, мобильную служебную вышку, диспетчерскую вышку, комнату подготовки полезной нагрузки, комнату замены полезной нагрузки, установку для ремонта твердотопливных ракетных ускорителей, установку для разборки твердотопливных ракетных ускорителей и резервуары для хранения жидкого водорода и жидкого кислорода.
Твердотопливные ракетные ускорители начинают сборку на стартовой площадке, а затем — внешний бак. Затем орбитальный аппарат соединяется с внешним резервуаром на стартовой площадке.
Система обработки запуска на стартовой площадке аналогична той, что используется в Космическом центре Кеннеди.
Операции по запуску космического центра Кеннеди несет ответственность за все сопряжения, предстартовые испытания и наземные операции по управлению запуском до тех пор, пока космический шаттл не покинет башню стартовой площадки. Затем ответственность передается Центру управления полетами космического центра имени Джонсона НАСА в Хьюстоне.В обязанности Центра управления полетами входят подъем, операции на орбите, вход, заход на посадку и посадка до завершения разбега при посадке, после чего орбитальный аппарат передается операциям после посадки в месте посадки для разворота и перезапуска. На стартовой площадке твердотопливные ракетные ускорители и внешний бак обрабатываются для запуска, а твердотопливные ракетные ускорители перерабатываются для повторного использования.
Затем ответственность передается Центру управления полетами космического центра имени Джонсона НАСА в Хьюстоне.В обязанности Центра управления полетами входят подъем, операции на орбите, вход, заход на посадку и посадка до завершения разбега при посадке, после чего орбитальный аппарат передается операциям после посадки в месте посадки для разворота и перезапуска. На стартовой площадке твердотопливные ракетные ускорители и внешний бак обрабатываются для запуска, а твердотопливные ракетные ускорители перерабатываются для повторного использования.
Щелкните здесь для ИЗГОТОВЛЕНИЯ И СБОРКИ ОРБИТЕРА
Щелкните здесь, чтобы получить информацию о миссии шаттла
(PDF) Анализ маневров при вождении с использованием данных о естественном движении по шоссе
из-за более низкой скорости движения в правой полосе.Выбор водителей для обгона
зависел от их характеристик и отставания
от транспортных средств на полосе назначения.
IV. ЗАКЛЮЧЕНИЕ
В этом исследовании делается попытка составить полную картину маневров
при вождении на автомагистралях путем анализа длительности маневра
, действий водителя в каждом маневре и вероятностей перехода между маневрами
.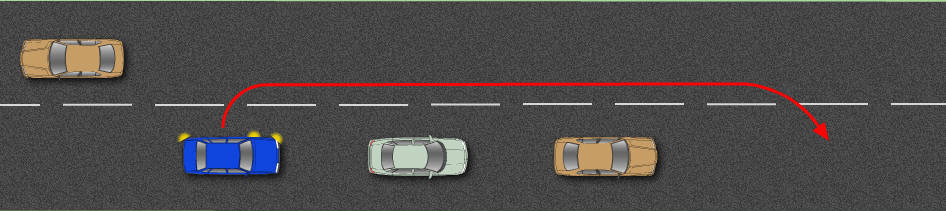 Можно извлечь некоторый вывод
Можно извлечь некоторый вывод
:
(1) Что водители делают на автомагистралях?
Свободное вождение и следование были наиболее распространенными типами маневра
при движении по шоссе, учет 82.7% от общего времени вождения
, с перестроением на третьем месте
(10,2%). Предложена модель вероятностей перехода маневра
. В соответствии с моделью вероятностей перехода было нарисовано 7
типичных схем движения: переход от бесплатного движения
к приближению / следованию / смене полосы движения, от приближения
к смене полосы движения, от следования к полосе движения
, от смены полосы движения на смену полосы движения свободное движение и переход с полосы
на следующую.События перехода от
к маневру с перестроением или перехода от него к маневру по смене полосы движения составили около 71% всех событий перехода на шоссе
. Цифры составили 37% и 23%
для следящего и приближающегося маневров соответственно.
События, относящиеся к любому из этих трех маневров, составили
95% всех событий перехода на автомагистраль.
(2) Сколько времени занимает каждый маневр?
Средняя продолжительность свободного вождения, приближения,
следования, смены полосы движения и экстренного торможения составила 31.6,
10,6, 29,5, 7,0, 5,5 с соответственно. В частности, для следующего маневра
дальний, средний и ближний следование заняли в среднем
22,5, 21,4 и 16,3 с соответственно. Цифры составляли 7,6 / 6,6 с
и 7,1 / 7,0 с для свободной смены полосы слева / справа и обгона от
при смене полосы слева / справа. Статистическая значимость
была обнаружена как в следующих (p = 0,005) группах, так и в группах смены полосы движения
(p <0,001).
(3) Как водители ведут себя при каждом маневре?
Помехи других транспортных средств сильно повлияли на ходовые качества
и действия водителя.Водители
поддерживали высокие скорости при свободном вождении и смене полосы движения.
маневрировали, а также снижали скорость для обеспечения безопасного движения вперед при приближении
. По мере приближения ведущих транспортных средств водители
будут более осторожными, чтобы сохранять меньшую скорость и снижать скорость при необходимости
. Внезапные риски, возникающие при движении, обычно вынуждали водителей
экстренно тормозить. В наборе маневров при смене полосы движения
водители двигались быстрее при смене полосы движения, чем при обгоне
при смене полосы движения.Для маневра смены полосы обгона наблюдались две модели
: ускорение для смены полосы движения и
замедление для смены полосы движения. Эти две модели привели к отклонениям
характеристик педали газа и тормоза в случаях обгона
.
Индивидуальные различия между водителями (например, пол, возраст
, стиль вождения) в этом исследовании не учитывались. Для будущих исследований
эти факторы следует анализировать отдельно. Ожидается, что результаты
, опубликованные в этом исследовании, послужат прочной основой
для разработки и проверки алгоритмов сегментации и классификации маневров
, а также методов оценки рисков при вождении
.
ПОДТВЕРЖДЕНИЕ
Авторы хотели бы поблагодарить Иши Лю из Университета Цинхуа
, Пэн Лю из Китайского сельскохозяйственного университета и
Сянъян Ли из Университета Сидянь за помощь в сегментировании клипов для маневрирования
на основе натуралистических данных вождения.
ССЫЛКИ
[1] Федеральное управление шоссейных дорог, «Дороги нашей страны: избранные
фактов и цифр», Tech. Представитель FHWA-PL-00-014, Министерство транспорта США
, Вашингтон, округ Колумбия, США, 1998.
[2] Р. Видеманн, «Моделирование дорожного движения в транспортном потоке»,
Университет Карлсруэ, Карлсруэ, Германия, 1974.
[3] М. Бракстоун и М. Макдональд, «Следование за автомобилем: a исторический обзор »
Транспортные исследования Часть F: Психология и поведение дорожного движения,
vol. 2, вып. 4, pp. 181–196, 1999.
2, вып. 4, pp. 181–196, 1999.
[4] С. Глейзер, Б. Ванхольм, С. Маммар, Д. Грюйер и Л. Нувелье,
«Планирование траектории на основе маневра для высоко автономных транспортных средств
. на реальной дороге с движением и взаимодействием водителей », IEEE
Транзакции по интеллектуальным транспортным системам, т.11, вып. 3, pp.
589–606, сентябрь 2010 г.
[5] Ф. Го и Ю. Фанг, «Оценка риска индивидуального водителя с использованием данных
натуралистического вождения», Анализ и предотвращение аварий, т. 61, pp.
3–9, декабрь 2013 г.
[6] Г. Ли, В. Ван, С. Е. Ли, Б. Ченг и П. Грин, «Эффективность проблескового тормоза
и аварийных систем в Предотвращение сбоев в задней части »,
Успехи в машиностроении, вып. 2014. С. 1–12. 2014.
[7] М.Брэкстон, Б. Уотерсон и М. Макдональд, «Детерминанты
при движении вперед в условиях перегруженного движения», Транспортные исследования, часть
F: Психология и поведение дорожного движения, том. 12, вып. 2, pp. 131–142, Mar.
2009.
[8] М. Тайеб-Маймон и Д. Шинар, «Минимальное и комфортное вождение
шагов вперед: реальность против восприятия», Human Factors, vol. 43, вып. 1,
pp. 159–172, 2001.
[9] Б. Хиггс и М. Аббас, «Сегментация и кластеризация
поведения при следовании за автомобилем: распознавание моделей вождения», IEEE
Транзакции по интеллектуальному транспорту. Системы, т.16, нет. 1, pp.
81–90, февраль 2015 г.
[10] Д.Д. Сальвуччи и А. Лю, «Динамика смены полосы движения: контроль водителя
и движение глаз», Транспортные исследования, часть F :
Психология дорожного движения и поведение, т. 5, вып. 2, pp. 123–132, 2002.
[11] S.E. Lee, E. CB Olsen и W. W. Wierwille, «Комплексное исследование
натуралистических перестроек», Tech. Представитель DOT HS 809
702, Министерство транспорта США, Национальное управление дорожного движения
, Вашингтон, округ Колумбия, США, 2004.
[12] Т. Толедо и Д. Зохар, «Моделирование продолжительности смены полосы движения»,
Transportation Research Record, vol. 1999, нет. 1, pp. 71–78, Jan.
2007.
[13] Г. Ли, С. Е. Ли, Ю. Ляо, В. Ван, Б. Ченг и Ф. Чен, «Дорожка
,, Распознавание маневра изменения. через состояние транспортного средства и работу водителя
Сигналы — результаты натуралистических данных о вождении », в Proc. IEEE
Симпозиум по интеллектуальным транспортным средствам, принято к публикации.
[14] F.Финнеган и П. Грин, «Время менять полосу движения: обзор литературы
», Tech. Представитель UMTRI-90-34, Мичиганский университет
Транспортный научно-исследовательский институт, Анн-Арбор, штат Мичиган, США, 1990.
[15] Д.Д. Сальвуччи, «Моделирование поведения водителя в когнитивной архитектуре»,
Human Factors, т. 48, вып. 2, pp. 362–380, 2006.
[16] Т. А. Дингус и др., «Исследование естественного вождения на 100 автомобилях; II этап —
Результаты полевого эксперимента на 100 автомобилей // ЖТФ. Представитель DOT HS 810 593,
Представитель DOT HS 810 593,
Министерство транспорта США, Национальная безопасность дорожного движения
Администрация, Вашингтон, округ Колумбия, США, 2006.
[17] Т. Толедо, О. Музыкант и Т. Лотан, « Бортовые регистраторы данных для
мониторинга и обратной связи о поведении водителей », Транспорт
Research Part C: Emerging Technologies, vol. 16, нет. 3, pp. 320–331,
Jun. 2008.
[18] Общество автомобильных инженеров, Оперативные определения вождения
Показатели эффективности и статистика (Рекомендуемая практика J2944),
Warrendale, Пенсильвания: Общество автомобильных инженеров , 2015.
1766
Курс по вождению в экстренных ситуациях — хороший вариант для водителей-подростков
30 января 2007 г.
Водители-подростки должны пройти курсы обучения вождению и обучению управлению автомобилем, прежде чем они получат права. Однако что готовит их к аварийным ситуациям, когда они начинают водить машину самостоятельно? Это будет один из тех случаев, когда обучение на собственном опыте — не самая лучшая и безопасная идея. К сожалению, есть вероятность, что если вы и ваш подросток не живете в районе с неблагоприятной погодой, у них не будет возможности отработать чрезвычайные ситуации, пока не станет слишком поздно.
К сожалению, есть вероятность, что если вы и ваш подросток не живете в районе с неблагоприятной погодой, у них не будет возможности отработать чрезвычайные ситуации, пока не станет слишком поздно.
Теперь есть много новых вариантов курсов подготовки водителей для родителей и водителей-подростков, которые хотят быть полностью подготовленными, находясь за рулем. Многие города предлагают курсы вождения в чрезвычайных ситуациях, обычно по довольно разумной цене, которые учат подростков, как справляться с чрезвычайными ситуациями в дороге. Среди видов извлеченных уроков подростки-водители узнают, например, о том, как выйти из заноса и как избежать чрезмерного исправления при повороте, чтобы пропустить что-то или кого-то на дороге.
Трудно подготовить подростков-водителей к аварийным ситуациям, ведь опыт действительно лучший учитель.К счастью, теперь родители могут записывать своих подростков в эти новые программы для большей уверенности в дороге. Некоторые из таких программ — это программы Street Survival и Driver’s Edge. Street Survival спонсируется Фондом BMW Car Club of America, и в нем работают любители автомобилей и высококлассные инструкторы по вождению. Поскольку учителя — волонтеры, курсы предлагаются по доступной цене (60 долларов для родителей и подростков, включая завтрак и обед).
Driver’s Edge спонсируется Bridgestone и предлагается бесплатно в десятке городов.Все больше и больше таких программ становится доступным. Хотя они являются добровольными и не требуются для подростков, чтобы иметь лицензию, родители обнаружат, что затраты оправдывают дополнительную уверенность, которую их водители-подростки будут иметь во время вождения.
В то время как некоторые страховые компании предлагают скидки безопасным водителям и тем, кто имеет более высокий средний балл, большинство еще не предлагают скидку за завершение курса обучения водителей в чрезвычайных маневрах. По-прежнему существует заблуждение, что дополнительная уверенность в себе сделает вождение за рулем более рискованным. Только время и статистика покажут, эффективны ли эти программы против нападения подростков, погибших за рулем. А пока я рекомендую всем заинтересованным родителям записать своих подростков в такую программу или, по крайней мере, научить их основам самостоятельно.
Поделиться этим
FacebookTwitterПатент США на систему тяги и управления твердотопливными таблетками для управления движением летательного аппарата Патент (Патент № 8,193,476 от 5 июня 2012 г.)
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИЭта заявка испрашивает приоритет в соответствии с 35 U.S.C. 119 (e) к предварительной заявке США № 61/061 239, озаглавленной «Система управления тягой и управлением твердотопливными гранулами для маневрирования летательного аппарата», поданной 13 июня 2008 г., полное содержание которой включено в качестве ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ1. Область изобретения
Настоящее изобретение относится к системе управления тяговым усилием твердотопливной таблетки (CAS) для обеспечения командного управления для маневрирования летательного аппарата во всем диапазоне скоростей транспортного средства, охватывающем как дозвуковые и сверхзвуковые числа Маха, а также в атмосфере и экзо-атмосфере.
2. Описание предшествующего уровня техники
Летательные аппараты, такие как самоходные ракеты, артиллерийские или трубчатые управляемые снаряды, кинетические перехватчики и беспилотные летательные аппараты, требуют командных полномочий для маневрирования транспортного средства для выполнения наведения и управления ориентацией. Каждый из этих аппаратов может работать в диапазоне скоростей, охватывающем как дозвуковые, так и сверхзвуковые числа Маха, а также в атмосфере и экзо-атмосфере во время одной миссии. Различная скорость и атмосферные условия создают разные проблемы для эффективного маневрирования транспортного средства в условиях ограничений по объему, весу и стоимости, налагаемых транспортным средством и миссией.
Один из подходов, используемых в большинстве, если не во всех ракетных продуктах, использует систему управления срабатыванием (CAS) для наведения на цель. Обычно в CAS используется набор из четырех управляющих поверхностей с ребрами, приводимых в действие отдельными серводвигателями. Приведение в действие рулевых поверхностей плавников в набегающий свободный поток создает силы сопротивления и направленные силы для маневрирования транспортного средства. Поверхности управления эффективны при сверхзвуковых скоростях выше 1 Маха в атмосфере, где создается достаточное сопротивление и сила для быстрого маневрирования транспортного средства.Однако при дозвуковых скоростях в атмосфере величина сопротивления и силы относительно невелики, а маневренность ограничена. В экзо-атмосфере срабатывание управляющей поверхности плавников совершенно неэффективно, поскольку не возникает сопротивления или силы. Кроме того, серводвигатели очень дороги, до 25% стоимости ракеты, и имеют проблемы с надежностью, связанные с тем, что движущиеся части серводвигателя подвергаются очень высоким перегрузкам при запуске.
Другой подход заключается в использовании отводных двигателей (или двигателей ориентации), которые выбрасывают накопленный газ или газ сгорания через сопло, создавая силу для прямого маневрирования транспортного средства. Система отводного двигателя малой тяги на жидком топливе включает в себя один или несколько резервуаров для хранения жидкости или газа и регулирующий клапан для смешивания и камеру сгорания для сжигания жидкого или газового ракетного топлива. Конфигурации жидкого ракетного топлива состоят либо из монотопливных систем, либо из двухкомпонентных систем, где двухкомпонентная топливная система содержит топливо и окислитель. Жидкое топливо имеет преимущество в том, что величину тяги можно непрерывно изменять, запускать и останавливать, и он может быть менее дорогостоящим, чем серводвигатели. Однако эти системы большие и тяжелые.Системы отклоняющего двигателя на жидком топливе используются на космических платформах, таких как спутники и кинетические боевые машины. Система на твердом топливе более легкая и менее сложная, но после воспламенения горит до тех пор, пока не будет израсходовано все твердое топливо. Вариантом системы твердотопливного ракетного топлива являются «пиротехнические двигатели» или «попперы», которые генерируют импульс тяги.
Система отводного двигателя малой тяги на жидком топливе включает в себя один или несколько резервуаров для хранения жидкости или газа и регулирующий клапан для смешивания и камеру сгорания для сжигания жидкого или газового ракетного топлива. Конфигурации жидкого ракетного топлива состоят либо из монотопливных систем, либо из двухкомпонентных систем, где двухкомпонентная топливная система содержит топливо и окислитель. Жидкое топливо имеет преимущество в том, что величину тяги можно непрерывно изменять, запускать и останавливать, и он может быть менее дорогостоящим, чем серводвигатели. Однако эти системы большие и тяжелые.Системы отклоняющего двигателя на жидком топливе используются на космических платформах, таких как спутники и кинетические боевые машины. Система на твердом топливе более легкая и менее сложная, но после воспламенения горит до тех пор, пока не будет израсходовано все твердое топливо. Вариантом системы твердотопливного ракетного топлива являются «пиротехнические двигатели» или «попперы», которые генерируют импульс тяги. Пиротехнические двигатели могут быть эффективно использованы в дозвуковом режиме полета корабля в атмосфере, а также вне атмосферы.
Пиротехнические двигатели могут быть эффективно использованы в дозвуковом режиме полета корабля в атмосфере, а также вне атмосферы.
Отводные двигатели на жидком или твердом топливе не так эффективны, как управляющие поверхности, такие как плавники, на сверхзвуковых скоростях в атмосфере. Мчащийся на высокой скорости свободный поток относительно транспортного средства имеет такую высокую степень импульса в сочетании с высоким моментом движения транспортного средства, что отклоняющая реактивная тяга оказывается лишь незначительно эффективной, если не используются нереально большие отклоняющие двигатели. Отводной подруливающей системе пришлось бы гореть в течение длительного времени, чтобы маневрировать. Длительное время горения на сверхзвуковых скоростях создает проблему упаковки транспортного средства из-за требований к объему, налагаемых требуемым количеством топлива.Способность машины к быстрому маневрированию, что имеет решающее значение для многих военных применений, также ограничена на сверхзвуковых скоростях.
Настоящее изобретение обеспечивает систему управления тягой и управлением твердотопливной таблеткой для маневрирования летательных аппаратов на дозвуковых и сверхзвуковых скоростях в условиях полета в атмосфере, а также вне атмосферы.
Управление на сверхзвуковых скоростях в атмосфере достигается за счет обеспечения планера, имеющего поворотную аэродинамическую поверхность управления, которая утоплена внутри планера и полость между ними.Одна или несколько таблеток твердого топлива воспламеняются для вытеснения газа, который течет в полость, создавая давление в полости, которое преодолевает внешнее давление, вынуждающее управляющую поверхность развернуться. В результате аэродинамическое сопротивление и сила маневрирования планера. Поток сжатого газа из полости во внешнюю среду ограничен для достижения цели по времени развертывания. Газ можно использовать для надувания воздушного мешка для раскрытия управляющей поверхности с пористостью ткани, контролирующей выброс сжатого газа в окружающую среду.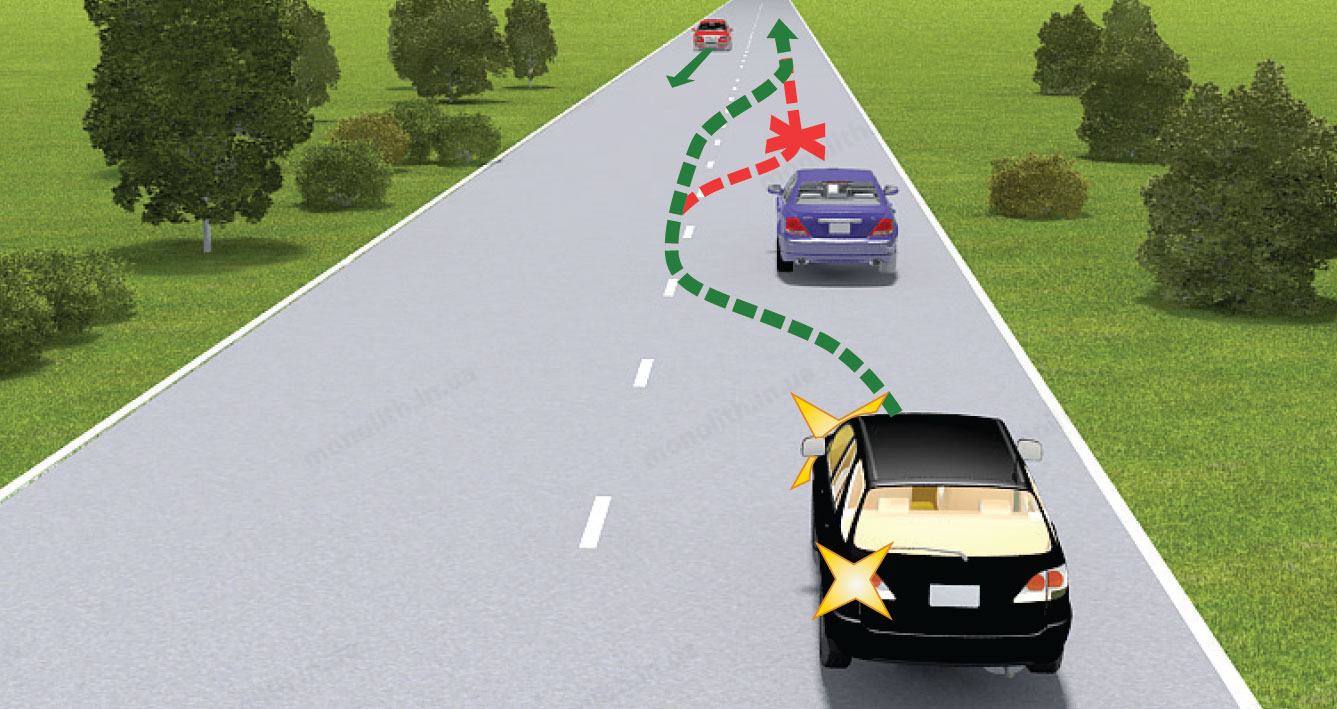
Для обеспечения дополнительных возможностей маневрирования на дозвуковых скоростях в атмосфере и в экзо-атмосфере поверхность управления образована сквозным отверстием над горловиной в планере, которые вместе образуют виртуальное сужающееся / расходящееся сопло. На дозвуковых скоростях транспортного средства в атмосфере Земли или в экзо-атмосфере сопло выбрасывает газ через отверстие в управляющей поверхности со сверхзвуковой скоростью, создавая отклоняющую тягу и силу для маневрирования планера без давления в полости для развертывания поверхности.На сверхзвуковых скоростях в атмосфере Земли сопло выпускает газ, который препятствует свободному потоку, создавая удар, который, в свою очередь, ограничивает поток газа из сопла, направляя, по меньшей мере, часть газа в полость, чтобы создать давление в полости и привести в действие управляющую поверхность. На низких сверхзвуковых скоростях в пределах переходной зоны командование представляет собой комбинацию отклоняющей тяги и наземного развертывания. При определенном сверхзвуковом числе Маха (M> 1) практически весь газ отводится в полость, так что командование фактически сводится только к развертыванию аэродинамической поверхности.
При определенном сверхзвуковом числе Маха (M> 1) практически весь газ отводится в полость, так что командование фактически сводится только к развертыванию аэродинамической поверхности.
По сути, на дозвуковых скоростях в атмосфере или в экзо-атмосфере тяга твердотопливной таблетки и CAS функционируют как подруливающее устройство для отклонения или ориентации. На сверхзвуковых скоростях в атмосфере набегающий поток по существу закупоривает сопло, так что тяга твердотопливной таблетки и функция CAS задействуют аэродинамическую управляющую поверхность. Тяга твердотопливных таблеток и CAS обеспечивает возможность работы на дозвуковых и сверхзвуковых скоростях, в атмосфере и вне атмосферы и развертывает наиболее эффективные средства маневрирования летательного аппарата в зависимости от режима работы.
Эти и другие особенности и преимущества изобретения будут очевидны специалистам в данной области техники из следующего подробного описания предпочтительных вариантов осуществления вместе с прилагаемыми чертежами, на которых:
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ Фиг. 1 представляет собой схему летательного аппарата, имеющего набор шарнирных поверхностей управления воздушным движением для предоставления командных полномочий для маневрирования летательного аппарата;
РИС. 2 — увеличенный вид хвостовой части, иллюстрирующий вариант твердотопливной таблетки CAS;
РИС.3 a и 3 b — покомпонентное изображение сборки управляющей поверхности и увеличенное изображение хвостовой части, иллюстрирующее развернутую поверхность;
РИС. 4 — схема системы зажигания для сжигания твердотопливных таблеток;
РИС. 5 — схема, иллюстрирующая создание давления в полости и управляемый выпуск газа под высоким давлением из полости во внешнюю среду для управления развертыванием поверхности;
РИС. 6 a и 6 b — схемы альтернативного варианта твердотопливной таблетки CAS;
РИС.7 a от до 7 c — различные виды альтернативного варианта осуществления тяги и CAS, обеспечивающие как отклонение тяги, так и управление аэродинамической поверхностью управления;
РИС. 8 — схема, иллюстрирующая работу CAS на дозвуковых скоростях в атмосфере Земли или на скорости вне атмосферы Земли;
РИС. 9 a — 9 b — схемы, иллюстрирующие работу КАС на сверхзвуковых скоростях в атмосфере Земли;
РИС.10 — диаграмма зависимости общего давления на выходе из сопла и набегающего потока от выхода из сопла и числа Маха набегающего потока;
РИС. 11 — диаграмма зависимости импульса набегающего потока и среза сопла от среза сопла и числа Маха набегающего потока;
РИС. 12 a и 12 b — схемы типичных атмосферных и экзоатмосферных последовательностей полета;
РИС. 13 — схема аэродинамической поверхности управления, включая порт управления креном; и
фиг.14 — схема летательного аппарата, имеющего противоположную пару развернутых аэродинамических поверхностей управления для обеспечения управления креном для маневрирования летательного аппарата.
Настоящее изобретение обеспечивает систему тяги и управления твердотопливными таблетками для маневрирования летательных аппаратов на дозвуковых и сверхзвуковых скоростях, в атмосфере и вне атмосферы. Система компактна, легка, недорогая и надежная, поскольку не требует движущихся частей, кроме аэродинамической поверхности управления.Описанная система обычно применима к широкому спектру летательных аппаратов, включая самоходные ракеты, управляемые снаряды с пушечным или трубчатым пуском, кинетические перехватчики и сверхзвуковые беспилотные летательные аппараты, но не ограничиваясь этим. Система полезна для транспортных средств, стабилизированных плавниками, или транспортных средств, стабилизированных вращением, с добавлением, например, центростремительной пружины, которая компенсирует центробежную силу на вращающемся транспортном средстве. Эта недорогая система имеет особое значение для разработки недорогих контрмер для перехвата и уничтожения угроз. Базовый вариант системы приведения в действие управления таблетками или P-CAS использует таблетки твердого топлива для приведения в действие управляющей поверхности с особой эффективностью в сверхзвуковом режиме в атмосфере. Другой вариант реализации системы управления тяговым усилием и управляющим действием или «PT-CAS» добавляет виртуальное сужающееся / расширяющееся сопло, образованное сквозным отверстием в управляющей поверхности и горловиной, в газовую камеру, чтобы обеспечить дополнительную возможность отклонения тяги для улучшения маневренности при на дозвуковых скоростях в атмосфере или на любой скорости в экзо-атмосфере.Функциональность управления креном может быть обеспечена либо в базовом варианте P-CAS, либо в более продвинутом варианте PT-CAS путем размещения порта управления креном сбоку от аэродинамической поверхности управления. Газ, протекающий через этот порт, создает силу в окружном направлении транспортного средства, в результате чего транспортное средство вращается (катится) вокруг своей продольной оси.
Базовый вариант системы приведения в действие управления таблетками или P-CAS использует таблетки твердого топлива для приведения в действие управляющей поверхности с особой эффективностью в сверхзвуковом режиме в атмосфере. Другой вариант реализации системы управления тяговым усилием и управляющим действием или «PT-CAS» добавляет виртуальное сужающееся / расширяющееся сопло, образованное сквозным отверстием в управляющей поверхности и горловиной, в газовую камеру, чтобы обеспечить дополнительную возможность отклонения тяги для улучшения маневренности при на дозвуковых скоростях в атмосфере или на любой скорости в экзо-атмосфере.Функциональность управления креном может быть обеспечена либо в базовом варианте P-CAS, либо в более продвинутом варианте PT-CAS путем размещения порта управления креном сбоку от аэродинамической поверхности управления. Газ, протекающий через этот порт, создает силу в окружном направлении транспортного средства, в результате чего транспортное средство вращается (катится) вокруг своей продольной оси. Эти порты расположены на разных сторонах последовательных поверхностей управления.
Эти порты расположены на разных сторонах последовательных поверхностей управления.
Как показано на фиг. 1, летательный аппарат 10 , такой как ракета, включает в себя набор из четырех аэродинамических поверхностей управления 12 , обычно называемых килями, закрылками или утками, установленными с возможностью поворота на планере 13 .В одном варианте осуществления сквозное отверстие , 14, , сформированное в передней части поверхности , 12, , образует часть виртуального сужающегося / расходящегося сопла. CAS воспламеняет гранулы твердого топлива, образуя поток газа. Этот газовый поток либо выбрасывается из сквозного отверстия 14 на сверхзвуковой скорости для создания отклоняющей тяги для маневрирования планера, либо направляется в полость между задней частью рулевой поверхности и планером, чтобы создать давление в полости и привести в действие рычаг управления. поверхность 12 для маневрирования планера. При дозвуковых скоростях в атмосфере или при любой скорости в экзо-атмосфере поток газа выбрасывается из сопла с небольшим сопротивлением или без сопротивления со стороны набегающего свободного потока 16 для создания отклоняющей тяги. Рулевая поверхность остается утопленной внутри планера. При сверхзвуковых скоростях в атмосфере взаимодействие вытесненного газа и набегающего потока 16 вызывает «удар», который, в свою очередь, создает «виртуальную пробку», которая препятствует сквозному отверстию, отводящему по крайней мере часть газа в резервуар. полость.При достаточно высоких числах Маха отклоняющая тяга незначительна. Выхлопной газ «стравливается» из полости с контролируемой скоростью для достижения цели по времени развертывания. Этот выхлопной газ может быть направлен для повышения давления в области основания на задней кромке планера, чтобы уменьшить «базовое сопротивление».
При дозвуковых скоростях в атмосфере или при любой скорости в экзо-атмосфере поток газа выбрасывается из сопла с небольшим сопротивлением или без сопротивления со стороны набегающего свободного потока 16 для создания отклоняющей тяги. Рулевая поверхность остается утопленной внутри планера. При сверхзвуковых скоростях в атмосфере взаимодействие вытесненного газа и набегающего потока 16 вызывает «удар», который, в свою очередь, создает «виртуальную пробку», которая препятствует сквозному отверстию, отводящему по крайней мере часть газа в резервуар. полость.При достаточно высоких числах Маха отклоняющая тяга незначительна. Выхлопной газ «стравливается» из полости с контролируемой скоростью для достижения цели по времени развертывания. Этот выхлопной газ может быть направлен для повышения давления в области основания на задней кромке планера, чтобы уменьшить «базовое сопротивление».
Вариант реализации твердотопливной таблетки CAS (P-CAS) 15 без виртуального сужающегося / расширяющегося сопла показан на фиг. 2-5. Хотя этот CAS может обеспечить некоторую маневренность на дозвуковых скоростях в атмосфере, он особенно ориентирован на сверхзвуковые скорости в атмосфере.Этот вариант осуществления обеспечивает управление, аналогичное обычному серводвигателю CAS, но менее дорого.
2-5. Хотя этот CAS может обеспечить некоторую маневренность на дозвуковых скоростях в атмосфере, он особенно ориентирован на сверхзвуковые скорости в атмосфере.Этот вариант осуществления обеспечивает управление, аналогичное обычному серводвигателю CAS, но менее дорого.
Аэродинамическая поверхность управления 12 на планере 13 может поворачиваться вокруг точки поворота 18 между убранным положением вне набегающего потока 16 и развернутыми положениями в набегающем потоке для обеспечения сопротивления при маневрировании планера. Поверхность управления может быть шарнирной или изогнутой для поворота вокруг точки. Полость 19 расположена позади точки поворота между задней частью 20 или поверхностью управления и планером 13 .Как показано здесь, полость образована выемкой 22 в поверхности планера 13 . В качестве альтернативы полость может быть образована выемкой в задней части поверхности управления или комбинацией двух выемок.
Камера 24 , включающая одну или несколько топливных камер 26 , каждая из которых содержит одну или несколько таблеток твердого топлива 28 , расположена внутри планера. Горловина 30 соединяет камеру с полостью. Система зажигания , 32, воспламеняет таблетки твердого топлива в одной или нескольких камерах для пороха, чтобы вытеснить газ 34, , который течет через горловину в полость, чтобы создать давление в полости и задействовать управляющую поверхность.Полость может увеличивать длину поверхности. Ограничение полости кормовой частью поверхности обеспечивает лучшее использование порохового газа и повышение эффективности.
Система зажигания включает в себя «электрическую спичку» 36 , соединенную с каждой камерой пороха, и провода , 38, , соединенные с контроллером , 40, . Электрическая спичка , 36, может быть небольшим зарядом горючего материала, который при сгорании выделяет заданное количество горячих дымовых газов, достаточное для воспламенения гранул. Возгорание воспламенителя может быть инициировано, например, электрическим током, протекающим через нагревательный провод рядом с горючим материалом воспламенителя или встроенным в него. Контроллер , 40, решает, когда запустить одну или несколько топливных камер для маневрирования летательного аппарата. Токовый сигнал, посылаемый контроллером через шпили, зажигает электрическую спичку, которая, в свою очередь, зажигает твердотопливную таблетку. Система зажигания не требует движущихся частей для приведения в действие управляющей поверхности между развернутым положением и убранным положением.
Возгорание воспламенителя может быть инициировано, например, электрическим током, протекающим через нагревательный провод рядом с горючим материалом воспламенителя или встроенным в него. Контроллер , 40, решает, когда запустить одну или несколько топливных камер для маневрирования летательного аппарата. Токовый сигнал, посылаемый контроллером через шпили, зажигает электрическую спичку, которая, в свою очередь, зажигает твердотопливную таблетку. Система зажигания не требует движущихся частей для приведения в действие управляющей поверхности между развернутым положением и убранным положением.
Каждая таблетка твердого топлива может состоять, по меньшей мере, из некоторого количества материала энергетического топлива и материала окислителя. Каждая топливная таблетка может содержать дополнительное связующее и / или пластификатор. Связующий материал и пластификатор могут быть реакционноспособными и могут служить топливным материалом и / или окислителем. Подходящие композиции для таблеток твердого топлива для газогенераторов хорошо известны. Таблетки твердого топлива соответственно получают из нитрата гуанидина (или гуанидиния) и основного нитрата меди, нитрата кобальта и их комбинаций, как описано в U.С. Пат. № 5,608,183. По крайней мере, 60% общей массы топливных таблеток может состоять из нитрата гуанидина и основного нитрата меди. Таблетки твердого топлива могут иметь относительно низкие температуры сгорания, например, между 1500 ° C и 2000 ° C.
Таблетки твердого топлива соответственно получают из нитрата гуанидина (или гуанидиния) и основного нитрата меди, нитрата кобальта и их комбинаций, как описано в U.С. Пат. № 5,608,183. По крайней мере, 60% общей массы топливных таблеток может состоять из нитрата гуанидина и основного нитрата меди. Таблетки твердого топлива могут иметь относительно низкие температуры сгорания, например, между 1500 ° C и 2000 ° C.
Таблетки твердого топлива могут изготавливаться большими партиями. Характеристики каждой партии топливных таблеток могут быть подтверждены испытаниями образцов партии, в которых проверяются случайно выбранные образцы из всей партии. Определение может быть сделано, если данные испытаний партии образцов показывают, что партия топливных таблеток находится в хорошем состоянии и находится в пределах спецификации.Предполагая, что партия топливных таблеток определена как хорошая; данные испытаний образцов партии могут быть проанализированы для определения точного количества топливных таблеток, которые должны быть загружены в камеры пороха. Количество топливных таблеток может быть определено как конкретное количество таблеток или как некоторый другой удобный показатель, такой как общий вес или масса таблеток, загружаемых в ракетный двигатель. Возможность регулировать количество или вес таблеток, загружаемых в топливную камеру, может обеспечить точное управление или общий импульс, который может быть произведен ракетным двигателем.
Количество топливных таблеток может быть определено как конкретное количество таблеток или как некоторый другой удобный показатель, такой как общий вес или масса таблеток, загружаемых в ракетный двигатель. Возможность регулировать количество или вес таблеток, загружаемых в топливную камеру, может обеспечить точное управление или общий импульс, который может быть произведен ракетным двигателем.
Ограничительный механизм 42 предусмотрен для управления выпуском выхлопных газов 44 из полости во внешнюю среду для достижения цели по времени раскрытия. Ограничительный механизм необходим для создания давления в полости для развертывания управляющей поверхности и для сброса давления в полости, чтобы позволить втягивать поверхность. Если бы поток газа из полости во внешнюю среду вообще не ограничивался, газ просто выходил бы во внешнюю среду, и в полости не было бы давления.И наоборот, если поток газа был полностью ограничен, давление в полости не сбрасывалось. Скорость, с которой газ выходит из полости, может быть постоянной или переменной в зависимости от давления в полости или угла раскрытия для достижения цели времени развертывания.
Как лучше всего показано на фиг. 3 a и 3 b , в одном варианте осуществления ограничительный механизм 42 включает боковые панели 46 и концевую пластину 48 , имеющую вентиляционные отверстия или прорези 50 , сформированные в них.Боковые панели , 46, расположены на противоположных сторонах поверхности аэроуправления 12 в продольном направлении от точки поворота до заднего конца поверхности. В положении убранной поверхности боковые панели утоплены внутрь планера. Когда поверхность управления приводится в раскрытое положение, боковые панели все еще перекрывают планер, чтобы предотвратить выход выхлопных газов, как лучше всего показано на фиг. 3 б . Типичные углы развертывания для многих летательных аппаратов довольно малы, примерно 5-15 °.Концевая пластина , 48, расположена на заднем конце рулевой поверхности и утоплена внутри планера, когда поверхность находится в убранном положении. Когда поверхность управления приводится в действие в развернутое положение, вентиляционные отверстия , 48, поднимаются над поверхностью планера, обеспечивая проходы из полости 19 во внешнюю среду. Сжатый газ в полости выходит через вентиляционные отверстия во внешнюю среду с контролируемой скоростью. Схема вентиляционных отверстий может быть сконфигурирована для обеспечения постоянной или переменной скорости отвода в зависимости от угла раскрытия.Предполагаются и другие ограничительные механизмы, которые обеспечивают желаемую функциональность, и находятся в пределах объема настоящего изобретения. Например, боковые панели и торцевую пластину можно заменить мягким «сильфонным» механизмом.
Типичные углы развертывания для многих летательных аппаратов довольно малы, примерно 5-15 °.Концевая пластина , 48, расположена на заднем конце рулевой поверхности и утоплена внутри планера, когда поверхность находится в убранном положении. Когда поверхность управления приводится в действие в развернутое положение, вентиляционные отверстия , 48, поднимаются над поверхностью планера, обеспечивая проходы из полости 19 во внешнюю среду. Сжатый газ в полости выходит через вентиляционные отверстия во внешнюю среду с контролируемой скоростью. Схема вентиляционных отверстий может быть сконфигурирована для обеспечения постоянной или переменной скорости отвода в зависимости от угла раскрытия.Предполагаются и другие ограничительные механизмы, которые обеспечивают желаемую функциональность, и находятся в пределах объема настоящего изобретения. Например, боковые панели и торцевую пластину можно заменить мягким «сильфонным» механизмом.
Как показано на фиг. 5, набегающий поток 16 обтекает планер со сверхзвуковой скоростью (Мах> 1) с опережающим статическим давлением набегающего потока P 1 . Система зажигания воспламеняет одну или несколько таблеток твердого топлива для выпуска газа 34 , который течет через горловину в полость, создавая совокупное давление в полости P 3 , которое заставляет управляющую поверхность приводиться в развернутое положение.Развертывание руля в сверхзвуковой набегающий поток 16 производит толчок 52 . Давление P 2 после скачка уплотнения представляет собой внешнее совокупное давление набегающего потока на внешней стороне контрольной поверхности. Суммарное давление — это внешнее давление или давление в полости, усредненное по поверхности для компенсации любых локальных изменений. Когда P 3 > P 2 , управляющая поверхность приводится в раскрытое положение.
5, набегающий поток 16 обтекает планер со сверхзвуковой скоростью (Мах> 1) с опережающим статическим давлением набегающего потока P 1 . Система зажигания воспламеняет одну или несколько таблеток твердого топлива для выпуска газа 34 , который течет через горловину в полость, создавая совокупное давление в полости P 3 , которое заставляет управляющую поверхность приводиться в развернутое положение.Развертывание руля в сверхзвуковой набегающий поток 16 производит толчок 52 . Давление P 2 после скачка уплотнения представляет собой внешнее совокупное давление набегающего потока на внешней стороне контрольной поверхности. Суммарное давление — это внешнее давление или давление в полости, усредненное по поверхности для компенсации любых локальных изменений. Когда P 3 > P 2 , управляющая поверхность приводится в раскрытое положение. Полное давление набегающего потока Pt (перед скачком уплотнения) представляет собой статическое давление плюс динамическое давление, определяемое по формуле Pt = P 1 +0.5 * ρ * V 2 где ρ — плотность набегающего потока, а V — скорость транспортного средства.
Полное давление набегающего потока Pt (перед скачком уплотнения) представляет собой статическое давление плюс динамическое давление, определяемое по формуле Pt = P 1 +0.5 * ρ * V 2 где ρ — плотность набегающего потока, а V — скорость транспортного средства.
В развернутом положении поверхность управления в атмосфере создает силу сопротивления, которая, в свою очередь, создает силу 55 , перпендикулярную продольной оси транспортного средства, для маневрирования планера. После развертывания выхлопной газ 44 течет через вентиляционные отверстия во внешнюю среду. Форсирующая функция, производимая за счет воспламенения твердотопливных таблеток, является сильной и быстрой, заставляя управляющую поверхность быстро перемещаться в желаемое развернутое положение.Как только функция принуждения будет удалена, внешнее совокупное давление набегающего потока заставит управляющую поверхность, несмотря на сопротивление ограничительного механизма, отводить выхлопной газ во внешнюю среду, обратно в ее утопленное положение. Например, панель управления может быть приведена в действие в развернутое положение за 1–10 мс, а после снятия форсирующей функции вернуться в свое утопленное положение за 1–10 мс. Приведению в действие может способствовать пружинный механизм, который предотвращает раскрытие до тех пор, пока функция принуждения не превысит пороговое значение, и помогает втягивать поверхность управления, когда функция принуждения удаляется.
Например, панель управления может быть приведена в действие в развернутое положение за 1–10 мс, а после снятия форсирующей функции вернуться в свое утопленное положение за 1–10 мс. Приведению в действие может способствовать пружинный механизм, который предотвращает раскрытие до тех пор, пока функция принуждения не превысит пороговое значение, и помогает втягивать поверхность управления, когда функция принуждения удаляется.
Контроллер 40 решает, когда запустить одну или несколько топливных камер, чтобы привести в действие поверхность управления для маневрирования летательного аппарата. Контроллер может работать «без обратной связи», генерируя последовательность зажигания на основе таких параметров, как угол развертывания, время развертывания, воздушная скорость транспортного средства, высота транспортного средства и т. Д. Контроллер использует эти параметры для расчета или поиска (из предварительно рассчитанной таблицы) желаемая последовательность зажигания. Эта последовательность зажигания может компенсировать такие факторы в изменении силы на управляющей поверхности при ее развертывании и изменении объема, а следовательно, и давления кавилля.В качестве альтернативы, контроллер может работать в «замкнутом контуре» для изменения вышеуказанной последовательности зажигания на основе одного или нескольких измеренных параметров. Например, на планере можно установить датчики для измерения угла раскрытия поверхности или давления в полости в реальном времени и передачи этих параметров обратно в контроллер. Затем контроллер может изменить последовательность зажигания, чтобы поддерживать желаемый угол раскрытия в течение заданного времени.
Эта последовательность зажигания может компенсировать такие факторы в изменении силы на управляющей поверхности при ее развертывании и изменении объема, а следовательно, и давления кавилля.В качестве альтернативы, контроллер может работать в «замкнутом контуре» для изменения вышеуказанной последовательности зажигания на основе одного или нескольких измеренных параметров. Например, на планере можно установить датчики для измерения угла раскрытия поверхности или давления в полости в реальном времени и передачи этих параметров обратно в контроллер. Затем контроллер может изменить последовательность зажигания, чтобы поддерживать желаемый угол раскрытия в течение заданного времени.
В другом варианте осуществления, показанном на фиг. 6 a и 6 b , тканевый мешок 60 расположен в полости 19 и соединен с горлом 30 , так что газ 34 надувает мешок для развертывания поверхности 12 . Пористость ткани образует ограничительный механизм для управления выпуском выхлопных газов 44 из полости. Ткань может иметь однородную пористость для выпуска газа с обеих сторон и с торца. В качестве альтернативы ткань может быть более или пористой только на заднем конце , 62, , для отвода выхлопных газов, например, для создания давления в области основания летательного аппарата.
Пористость ткани образует ограничительный механизм для управления выпуском выхлопных газов 44 из полости. Ткань может иметь однородную пористость для выпуска газа с обеих сторон и с торца. В качестве альтернативы ткань может быть более или пористой только на заднем конце , 62, , для отвода выхлопных газов, например, для создания давления в области основания летательного аппарата.
Вариант осуществления PT-CAS 70 с виртуальным сужающимся / расходящимся соплом 72 показан на фиг.7-11. Этот PT-CAS может обеспечить эффективную маневренность на дозвуковых скоростях в атмосфере и на сверхзвуковых скоростях в атмосфере. Этот вариант осуществления эффективно сочетает в себе функции отклоняющего двигателя малой тяги и серводвигателя CAS и является менее дорогостоящим. Для ясности и краткости, но без потери общности, аналогичные номера элементов в P-CAS 15 без возможности отклонения тяги будут использоваться для аналогичных элементов в PT-CAS 70 с возможностью отклонения.
Как показано на фиг.7 a — 7 c PT-CAS 70 , единственная необходимая модификация базового варианта P-CAS для обеспечения дополнительной возможности отклоняющего двигателя — это формирование сквозного отверстия 14 в управлении аэродинамикой поверхность 12 над горловиной 30 для образования виртуального сужающегося / расходящегося сопла 72 . Сквозное отверстие имеет больший диаметр, чем горловина. Полость 19 , камеры пороха 26 , система зажигания 32 , ограничительный механизм 46 и контроллер 40 функционально идентичны.Конкретный дизайн каждого компонента будет зависеть от требований приложения и миссии, например: общее требуемое топливо, целевое время развертывания и т. д. В базовом варианте выполнения требования к горловине ослаблены. Горловина должна только направлять сгоревший газ в полость, а не образовывать сопло, обеспечивающее сверхзвуковой переход к вытесняемому газу.
Как показано на фиг. 8, при дозвуковых скоростях транспортного средства в атмосфере Земли или в экзо-атмосфере, когда контроллер зажигает одну или несколько топливных камер одновременно или в желаемой последовательности, газ 34 выбрасывается в камеру с дозвуковой скоростью. (M <1) и испытывает звуковой переход, пересекающий 1 Маха, когда он течет через горловину 30 и выходит через отверстие 14 со сверхзвуковой скоростью (M> 1.0) создавая отклоняющую тягу 74 (направленную вниз силу) для маневрирования планера без давления в полости для развертывания поверхности. Когда скорость сгоревшего газа увеличивается из камеры через горловину и выходит из сопла, давление падает. Желаемые скорость и давление на выходе из сопла могут быть достигнуты за счет правильной конструкции геометрии сопла, которая хорошо известна в соответствующей области техники.
Как показано на фиг. 9 a и 9 b , на сверхзвуковых скоростях транспортного средства в атмосфере Земли, когда контроллер зажигает одну или несколько топливных камер одновременно или в желаемой последовательности, газ 34 выбрасывается в камеру с дозвуковой скоростью и испытывает звуковой переход, когда он течет через горловину 30 и выходит через отверстие 14 на сверхзвуковой скорости (M> 1. 0). Выброшенный газ препятствует свободному потоку 16 , создавая удар 52 , который ограничивает поток газа из сопла, направляя, по меньшей мере, часть газа в полость 19 для создания давления в полости и развертывания управляющей поверхности 12 . На достаточно высоких сверхзвуковых скоростях набегающий поток образует виртуальную пробку сквозного отверстия, так что PT-CAS функционирует так же, как P-CAS. Как только поверхность управления развернута, амортизатор 52 перемещается обратно в точку поворота, и выхлопной газ 44 течет из полости во внешнюю среду.Развернутая поверхность создает сопротивление в атмосфере, которое, в свою очередь, создает силу 55 , перпендикулярную продольной оси транспортного средства, для маневрирования планера.
0). Выброшенный газ препятствует свободному потоку 16 , создавая удар 52 , который ограничивает поток газа из сопла, направляя, по меньшей мере, часть газа в полость 19 для создания давления в полости и развертывания управляющей поверхности 12 . На достаточно высоких сверхзвуковых скоростях набегающий поток образует виртуальную пробку сквозного отверстия, так что PT-CAS функционирует так же, как P-CAS. Как только поверхность управления развернута, амортизатор 52 перемещается обратно в точку поворота, и выхлопной газ 44 течет из полости во внешнюю среду.Развернутая поверхность создает сопротивление в атмосфере, которое, в свою очередь, создает силу 55 , перпендикулярную продольной оси транспортного средства, для маневрирования планера.
В общем, существует «переходная область» между областью чистого отклоняемого двигателя малой тяги и областью чистой управляющей поверхности. В этой переходной зоне полномочия управления представляют собой комбинацию отклонения тяги и приведения в действие поверхности управления. Числа Маха, при которых начинается и заканчивается переходная область, зависят от ряда конструктивных параметров и параметров миссии.Как описано выше, контроллер может работать либо в конфигурации с открытым, либо с замкнутым контуром либо в переходной, либо в сверхзвуковой областях, в зависимости от требований миссии. Фиг. 10 и 11 — графики зависимости полного давления и количества движения на выходе из сопла и набегающего потока от числа Маха на выходе из сопла и числа Маха набегающего потока, соответственно. Эти графики иллюстрируют динамику отклоняемой тяги и управляющей поверхности по мере увеличения скорости транспортного средства и дают представление о конструктивном пространстве для твердотопливной таблетки CAS с виртуальным сужающимся / расходящимся соплом.В этом примере камера гранул создает давление в камере около 100 фунтов на квадратный дюйм с числом Маха на выходе из сопла около 2,0.
В этой переходной зоне полномочия управления представляют собой комбинацию отклонения тяги и приведения в действие поверхности управления. Числа Маха, при которых начинается и заканчивается переходная область, зависят от ряда конструктивных параметров и параметров миссии.Как описано выше, контроллер может работать либо в конфигурации с открытым, либо с замкнутым контуром либо в переходной, либо в сверхзвуковой областях, в зависимости от требований миссии. Фиг. 10 и 11 — графики зависимости полного давления и количества движения на выходе из сопла и набегающего потока от числа Маха на выходе из сопла и числа Маха набегающего потока, соответственно. Эти графики иллюстрируют динамику отклоняемой тяги и управляющей поверхности по мере увеличения скорости транспортного средства и дают представление о конструктивном пространстве для твердотопливной таблетки CAS с виртуальным сужающимся / расходящимся соплом.В этом примере камера гранул создает давление в камере около 100 фунтов на квадратный дюйм с числом Маха на выходе из сопла около 2,0.
Давление на выходе из сопла 90 , общее давление в набегающем потоке 92 и давление Пито в набегающем потоке 94 , которые определяют, как струя отводимого газа переходит от органа управления отводом к органу управления с поверхности управления, показаны на фиг. 10. При дозвуковых числах Маха аппарата газ из отводной струи беспрепятственно течет в набегающий поток и не создает ударов ни на управляющей поверхности, ни вблизи плоскости выхода сопла.Площадь отверстия на внешней поверхности контрольной поверхности составляет часть сопла. На сверхзвуковых скоростях транспортного средства отводимый реактивный газ создает препятствие для набегающего потока, что, в свою очередь, приводит к возникновению удара сначала в отверстии в управляющей поверхности. Общее давление в набегающем потоке , 92, представляет максимальное давление, которое возможно в свободном потоке. Управляющее давление свободного потока 94 — это давление после нормального скачка уплотнения. Это представляет собой минимально возможное давление, которого может достичь набегающий поток.Фактическое совокупное внешнее давление P 2 на управляющей поверхности будет зависеть от силы ударной волны и будет находиться где-то между давлением Пито 94 и общим давлением 92 .
Это представляет собой минимально возможное давление, которого может достичь набегающий поток.Фактическое совокупное внешнее давление P 2 на управляющей поверхности будет зависеть от силы ударной волны и будет находиться где-то между давлением Пито 94 и общим давлением 92 .
Когда внешнее давление в непосредственной близости от плоскости выхода сопла (отверстие в контрольной поверхности) превышает статическое давление 90 на выходе из сопла (отверстие в контрольной поверхности), оно начинает ограничивать поток отводимого газа. поток в набегающий поток, и полость на контрольной поверхности начнет нагнетаться.По мере увеличения числа Маха транспортного средства в полость будет отводиться больший поток, что в конечном итоге приведет к перемещению управляющей поверхности в свободный поток в развернутое положение. Для числа Маха на выходе из сопла, равного 2,0, и давлений, показанных на фиг. 10, этого не произойдет до тех пор, пока число Маха транспортного средства также не станет больше примерно 2,0, когда общее давление набегающего потока и давление Пито набегающего потока превышают давление на выходе из сопла. Если бы число Маха на выходе из сопла было выше 2,0, давление на выходе из сопла было бы ниже, и переход произошел бы при более низком числе Маха набегающего потока и наоборот.Скорость на выходе из сопла можно изменять, контролируя геометрию и задавая соотношение площадей горловины и сквозного отверстия. Число Маха на выходе из сопла фиксируется отношением площадей сквозного отверстия к горловине. Давление на выходе из сопла для данной скорости на выходе из сопла можно изменять, изменяя давление в камере. Этого можно достичь, используя разное количество топлива в каждой камере или зажигая более одной гранулы. В этом случае для давления в камере 100 фунтов на квадратный дюйм сопло обеспечивает выходную скорость 2 Маха.0 и давление на выходе около 15 фунтов на квадратный дюйм.
Если бы число Маха на выходе из сопла было выше 2,0, давление на выходе из сопла было бы ниже, и переход произошел бы при более низком числе Маха набегающего потока и наоборот.Скорость на выходе из сопла можно изменять, контролируя геометрию и задавая соотношение площадей горловины и сквозного отверстия. Число Маха на выходе из сопла фиксируется отношением площадей сквозного отверстия к горловине. Давление на выходе из сопла для данной скорости на выходе из сопла можно изменять, изменяя давление в камере. Этого можно достичь, используя разное количество топлива в каждой камере или зажигая более одной гранулы. В этом случае для давления в камере 100 фунтов на квадратный дюйм сопло обеспечивает выходную скорость 2 Маха.0 и давление на выходе около 15 фунтов на квадратный дюйм.
Площадь сквозного отверстия 14 , которое образует часть сопла, и площадь, создаваемая в полости на заднем конце поверхности управления при его развертывании, необходимо контролировать так, чтобы давление P 3 было больше давление P 2 в течение необходимого времени, определенного руководящими требованиями. Если давление P 3 недостаточно высокое, руль не развернется. Геометрия входного отверстия сквозного отверстия и его расположение на контрольной поверхности должны точно контролироваться для поддержания необходимого давления (P 3 ) в полости, чтобы контрольная поверхность функционировала должным образом в течение требуемого времени.
Если давление P 3 недостаточно высокое, руль не развернется. Геометрия входного отверстия сквозного отверстия и его расположение на контрольной поверхности должны точно контролироваться для поддержания необходимого давления (P 3 ) в полости, чтобы контрольная поверхность функционировала должным образом в течение требуемого времени.
Импульс 90 на выходе из сопла и импульс 92 набегающего потока показаны на фиг. 11 для тех же условий камеры (100 psia) и геометрии сопла (число Маха на выходе 2,0). Когда импульс на выходе из сопла существенно больше, чем импульс набегающего потока, газовая струя из отводного сопла будет с легкостью течь во внешний поток. По мере увеличения числа Маха (скорости) транспортного средства импульс набегающего потока увеличивается. Когда импульс набегающего потока существенно больше, чем импульс плоскости выхода сопла на пороговую величину, газ из сопла будет почти полностью ограничен от потока во внешний поток и будет направлен в полость. Число Маха, при котором это происходит для конфигурации сопла и камеры, выбранной в этом примере, составляет около 2,65 (импульс набегающего потока около 145 фунтов * сила / дюйм 2 и момент на выходе из сопла 120 фунтов * сила / дюйм 2 ). Таким образом, скорость транспортного средства вызовет активацию управляющей поверхности при сверхзвуковых числах Маха. Параметры, влияющие на развертывание управляющей поверхности: геометрия сквозного отверстия, давление в полости, число Маха набегающего потока, давление в камере двигателя для пеллет и геометрия сопла двигателя для пеллет.
Число Маха, при котором это происходит для конфигурации сопла и камеры, выбранной в этом примере, составляет около 2,65 (импульс набегающего потока около 145 фунтов * сила / дюйм 2 и момент на выходе из сопла 120 фунтов * сила / дюйм 2 ). Таким образом, скорость транспортного средства вызовет активацию управляющей поверхности при сверхзвуковых числах Маха. Параметры, влияющие на развертывание управляющей поверхности: геометрия сквозного отверстия, давление в полости, число Маха набегающего потока, давление в камере двигателя для пеллет и геометрия сопла двигателя для пеллет.
Для этого примера (число Маха на выходе из сопла 2,0), управляющая поверхность начнет разворачиваться при числе Маха набегающего потока около 2,0, а отклоняющая тяга прекратится при числе Маха набегающего потока около 2,6. Таким образом, область чистой отклоняющейся тяги составляет приблизительно от 0 Маха до приблизительно 2,0 Маха, переходная область составляет от 2,0 Маха до 2,6 Маха, а область чистой контрольной поверхности приблизительно выше приблизительно 2,6 Маха. Начальная и конечная точки, а также ширина переходной области устанавливаются конструктивными параметрами для геометрии сопла, давления в камере, размера, количества и последовательности выстрелов гранул и т. Д.в соответствии с требованиями к полномочиям командования для конкретного летательного аппарата и последовательности выполнения задач.
Начальная и конечная точки, а также ширина переходной области устанавливаются конструктивными параметрами для геометрии сопла, давления в камере, размера, количества и последовательности выстрелов гранул и т. Д.в соответствии с требованиями к полномочиям командования для конкретного летательного аппарата и последовательности выполнения задач.
Примерные временные рамки 100, и 102 , использующие твердотопливное топливо CAS с виртуальным сужающимся / расходящимся соплом для полета в атмосфере и вне атмосферы для обеспечения наведения транспортного средства к намеченной цели, показаны на фиг. 12 a и 12 b соответственно.
При полете в атмосфере аппарат запускается в момент времени «0» и разгоняется до момента времени «4».Во время ускорения в дозвуковом режиме скорости от момента «0» до момента «3», когда число Маха транспортного средства меньше 1, управление осуществляется за счет запуска топливных камер для создания только отклоняющего двигателя малой тяги. По мере того как скорость транспортного средства увеличивается до 1 Маха и выше от момента времени «3» до «4», полномочия управления постепенно переходят к использованию управления. В этой переходной зоне горючие камеры создают комбинацию отклоняющей тяги и сопротивления поверхности управления. Во время крейсерского полета от времени «4» до «5» власть команды достигается за счет выстрела пороховой камеры для создания давления в полости и приведения в действие поверхности управления.После захвата цели и во время сражения в конце игры наведение машины осуществляется с помощью поверхностей управления.
Для последовательности полета, которая охватывает полет от атмосферного до экзоатмосферного, аппарат запускается в момент времени «0» и разгоняется до времени «4» в атмосфере. Во время ускорения в дозвуковом режиме скорости от момента «0» до момента «3», когда число Маха транспортного средства меньше 1, управление осуществляется с помощью отклоняющего двигателя малой тяги. Когда скорость транспортного средства увеличивается до 1 Маха и выше от момента времени «3» до «4», управление переходит к использованию закрылка.Во время атмосферного крейсерского полета или ускорения от времени «4» до «5» власть команды достигается за счет использования поверхности управления. При достижении высоты с очень низкой плотностью окружающей среды (экзо-атмосфера) поверхность управления не будет иметь достаточных полномочий для управления транспортным средством. В этот момент, обозначенный как время «5», полномочия управления автоматически передаются функции отклоняющего подруливающего устройства. Несмотря на то, что скорость транспортного средства сверхзвуковая, окружающая плотность настолько мала, что поток газа не прерывается обратно в полость.После захвата цели за пределами атмосферы и во время боя в конце игры наведение на цель осуществляется с помощью отклоняющих подруливающих устройств.
Функциональность управления креном может быть обеспечена либо в базовой P-CAS, либо в более продвинутых вариантах реализации PT-CAS путем размещения порта управления креном , 110, на стороне аэродинамической поверхности управления 12 , как показано на фиг. 13 и 14. Газ, протекающий через этот порт, создает силу 112 в окружном направлении транспортного средства (касательное к поверхности планера), в результате чего транспортное средство вращается (катится) на 114 вокруг своей продольной оси 116 , чтобы произвести или отрицать бросок.Эти порты расположены на разных сторонах последовательных поверхностей управления.
13 и 14. Газ, протекающий через этот порт, создает силу 112 в окружном направлении транспортного средства (касательное к поверхности планера), в результате чего транспортное средство вращается (катится) на 114 вокруг своей продольной оси 116 , чтобы произвести или отрицать бросок.Эти порты расположены на разных сторонах последовательных поверхностей управления.
Хотя были показаны и описаны несколько иллюстративных вариантов осуществления изобретения, специалистам в данной области техники придут в голову многочисленные вариации и альтернативные варианты осуществления. Предполагаются такие изменения и альтернативные варианты осуществления, и они могут быть выполнены без отклонения от сущности и объема изобретения, как определено в прилагаемой формуле изобретения.
5 Ракетные двигательные установки для полетов в космос и ракеты | Обзор потребностей ВВС США и Министерства обороны США в авиакосмической двигательной установке
материалов, которые могут более полно использовать возможности применения DoD в ракетах наземного и воздушного базирования. Эти две области обсуждаются ниже.
Эти две области обсуждаются ниже.
Перспективы поиска энергоемких, но нечувствительных топлив в ближайшем будущем кажутся слабыми. Монотопливы с более высокой плотностью I sp могут развиваться первыми, но даже если они будут утверждены, можно ожидать, что на создание надежного промышленного продукта при приемлемой стоимости потребуется много лет.
Материалы камеры и горловины сопла Основная проблема, ограничивающая будущее использование любого нового энергетического топлива, даже если оно станет доступным, — это отсутствие материалов, устойчивых к химическому воздействию и эрозии при высоких температурах.Высокие температуры, достигаемые с помощью энергетического топлива, будут производить те же молекулы, что и другие виды топлива, включая CO 2 , H 2 O, N 2 и CO. Потребность в материалах с низкой эрозией является результатом более высокие температуры, достигаемые этими порохами.
Findi n г 5-7. Если Министерство обороны и ВВС собираются реализовать какие-либо варианты преобразования в конкретных профилях характеристик тактических ракет в долгосрочной перспективе, потребуются хорошо финансируемые, непрерывные усилия в области энергетического топлива и стойких материалов.
Рекомендация 5-7. Министерство обороны и ВВС должны профинансировать поиск новых высокоэнергетических ракетных топлив и разработку материалов с очень высокой температурой, стойкостью к химическим воздействиям и низкой скоростью эрозии.
ЗАКЛЮЧИТЕЛЬНОЕ НАБЛЮДЕНИЕ Фактический уровень финансирования технологических программ, таких как IHPRPT, а также поддержки и совершенствования инженерного обеспечения тактических и стратегических ракет, упал намного ниже первоначального запланированного уровня финансирования.Это ограничивает возможности усовершенствования силовой установки и сводит к минимуму возможность обучения следующего поколения конструкторов и специалистов по производству. Демографические данные персонала позволяют прогнозировать выход на пенсию людей с критически важными навыками в разработке и производстве больших ракет и ракет-носителей в те же сроки. Последствия этой ситуации на протяжении многих лет подрывали аэрокосмический потенциал США. Если не будет принято серьезное обязательство обратить вспять эту тенденцию, способность отрасли обеспечить высококачественные инженерные и производственные мощности, необходимые для реализации среднесрочных и долгосрочных целей ВВС в отношении доступа в космос, космических операций и ракеты следует рассматривать как находящиеся под угрозой.
Бенсон, С. В., Л. А. Аррингтон, В. А. Хоскинс и Н. Дж. Меккель. 1999 г. Разработка ППН для космического корабля ЭО-1. AIAA-99-2276. Июнь.
Чиен, Куэй-Ру, Уильям Дж. Тайге, Томас А. Бонд и Рафаль Спирс. 2006. Обзор электрического движения в L-3 Communications Electron Technologies, Inc. Бумага AIAA 2006-4322.
Бумага AIAA 2006-4322.
Энциклопедия астробиологии, астрономии и космических полетов (без даты).Доступно по адресу http://www.daviddarling.info/encyclopedia/X/XIPS.html. Последний доступ 16 июня 2006 г.
Джеймс, Ларри. 2005. Приветствие и знакомство с днем индустрии исследований и анализа HLV », презентация на Дне индустрии ARES, Эль-Сегундо, Калифорния, 7 марта.
Джонс, Ф., Д. Мерфи, Д. Аллен, Л. Кавени и М. Пищор. 1996. SCARLET: высокоэффективная солнечная батарея с близким сроком службы концентратора. Документ AIAA 96-1021.
Кауфман, Х.Р. 1985. Технология подруливающих устройств с закрытым штоком.Журнал AIAA 23 (1): 78-87.
.