Устройство (схема) промышленного робота. Приводы промышленных роботов. Механизмы промышленных роботов.
Устройство современных промышленных роботов довольно сложно. Этим объясняется то, что производители выполняют их обслуживание и ремонт практически всегда сами.
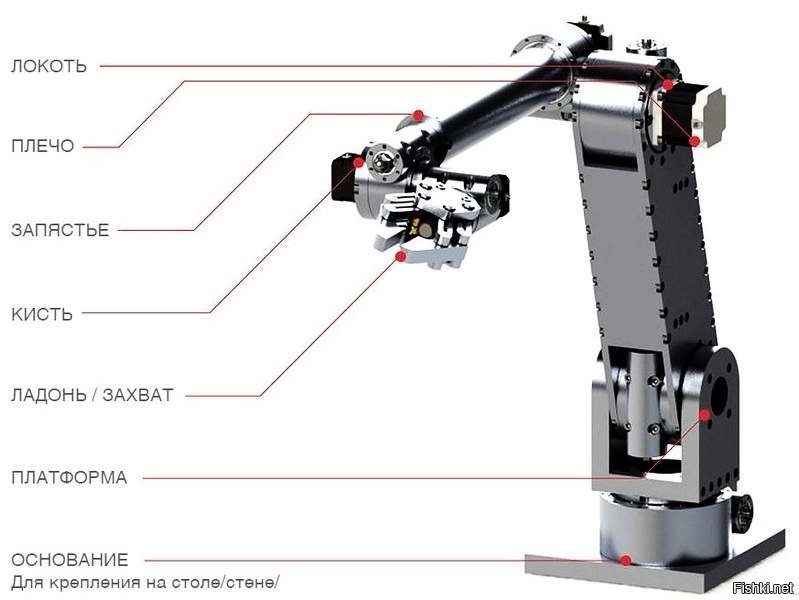
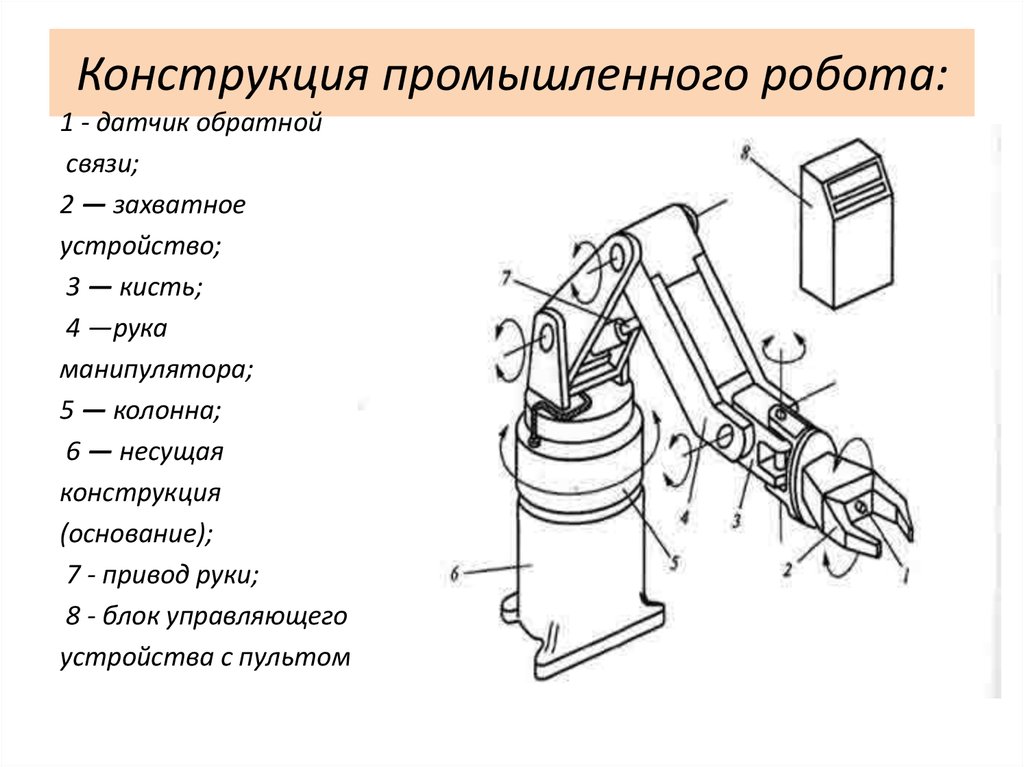
Устройство промышленного робота может быть различным в зависимости от типа робота: шарнирный робот, дельта робот или SCARA робот. Рассмотрим схему промышленного робота на примере шарнирного робота. Упрощенно робот состоит из следующих компонентов:
-
блока управления с пультом;
-
опорной конструкции;
-
привода руки манипулятора;
-
руки манипулятора;
-
запястья манипулятора;
-
захватного устройства.


Исполнительный механизм робота манипулятора представляет собой открытую кинематическую цепь, звенья которой последовательно соединены собой и обладают, как правило, одной степенью свободы. Подвижность робота определяется сочетанием и взаимным расположением сочленений, при это условно сочленения подразделяются на две группы: выполняющие транспортную функцию, предназначенные для вывода манипулятора в нужную позицию, и выполняющие ориентирующую функцию, отвечающие за ориентацию рабочего органа.
На конце манипулятора промышленного робота устанавливается исполнительный (рабочий) орган.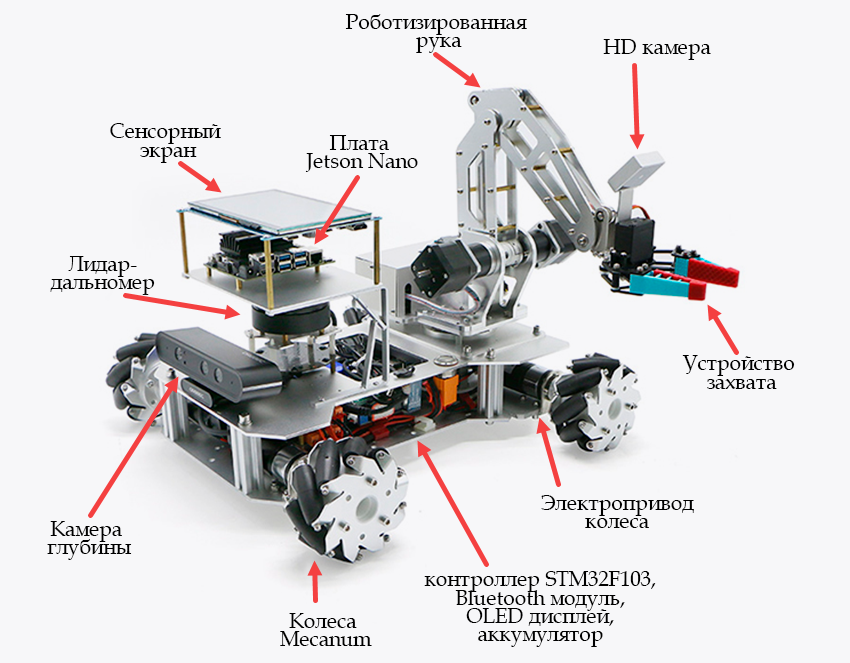
В общем виде все захватные устройства подразделяются на схватывающие, поддерживающие и удерживающие.
В качестве рабочего органа промышленного робота могут использоваться сварочные клещи, пульверизатор, фреза, дрель, нож, сварочная головка, отвертка и т.д.
Приводы промышленных роботов предназначены для приведения в движение звеньев манипулятора и бывают: электрические, гидравлические и пневматические. Об электрических приводах промышленных роботов мы немного сказали выше. Скажем еще, что электрические приводы роботов являются наиболее распространенными ввиду своей точности. Гидравлические приводы промышленных роботов обеспечивают большее усилие и быстродействие, однако они устанавливаются лишь на роботах очень большой грузоподъемности.
Следует отметить что механизмы промышленных роботов всех основных производителей обладают высокой износоустойчивостью, обеспечивая ресурс работы до обслуживания в несколько тысяч часов и более.
Контроллеры промышленного робота состоят из блока управления и пульта управления. Блок управления предназначен для управления роботом, при этом он может одновременно управлять несколькими роботами. Пульт управления предназначен для программирования робота или оперативного внесения изменений в его работу.
Если у вас есть какие-либо вопросы по устройству (схеме) промышленного робота вы всегда можете обратиться к специалистам компании АЛЬФА ИНЖИНИРИНГ. Мы будем рады проконсультировать вас по всем вопросам работы промышленного робота и в случае необходимости выполним внедрение робототехнической ячейки на базе роботов FANUC «под ключ».
Как работает робот? Устройство робота простыми словами
В 1920 году чешский писатель Карел Чапек придумал название для механизма, изобретенного для выполнения работы вместо человека — “робот”. Определение со временем прижилось и с конца XX столетия стало обозначать систему узлов, датчиков и механизмов, предназначенную для выполнения набора операций в соответствии с заложенной программой.
Прогресс науки и техники позволил инженерам-конструкторам создавать все более совершенные машины, способные заменить человека в экстремальных условиях: в космосе, под водой, на поле боя. Робот не знает усталости, способен выполнять без ошибок точнейшие движения — именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.
(Типы роботов)
Существуют десятки основных типов роботов, которые отличаются по нескольким параметрам — от назначения до внешнего вида. Для того, чтобы понять, как работает робот, рассмотрим его вид, наиболее приближенный к облику человека — робот-андроид.
Материалы для изготовления
Материалы, которые используют для получения узлов, механизмов и каркаса робота, зависят от нескольких факторов:
- Назначения машины;
- Условий ее работы;
- Заданных характеристик (веса, габаритов).
Наиболее часто используют полимеры всех типов, сталь с добавками, повышающими гибкость и прочность, алюминий, резину, карбоновые материалы, сплавы с содержанием титана.
Конструкция андроида
Человекоподобный робот состоит из нескольких основных частей:
- Голова — верхняя часть конструкции;
- Торс — основной каркас робота;
- Руки-манипуляторы с силовыми механизмами;
- Ноги-шагоход из двух нижних конечностей, если шасси, то гусеничного привода.
(Наглядная конструкция робота)
Вопреки распространенному мнению, что в голове андроида, как у живого человека, находится “мозг”, т. е. компьютер или центральный процессор, чаще всего в верхней части механизма располагаются другие элементы системы: видеокамеры, датчики, гироскоп. Это обусловлено сравнительно небольшими размерами “головы”, внутреннее пространство которой не способно вместить большой объем электроники.
е. компьютер или центральный процессор, чаще всего в верхней части механизма располагаются другие элементы системы: видеокамеры, датчики, гироскоп. Это обусловлено сравнительно небольшими размерами “головы”, внутреннее пространство которой не способно вместить большой объем электроники.
Торс — наиболее защищенная часть робота. Во внутреннем пространстве каркаса размещают электронику, управляющую системой, автономный источник питания (аккумулятор).
(Классическая рука-манипулятор)
Захват/перемещение груза, выполнение других операций, включая действия с инструментом — задачи для верхних конечностей — манипуляторов. Кистевые окончания могут иметь форму и функцию кистей человека.
Роботы-андроиды передвигаются шагами на двух “ногах”. Шасси копирует антропологические особенности строения человеческого тела: ноги состоят из нескольких составных частей, соединенных суставами-шарнирами. Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.
Для распознавания окружающей обстановки — предметов, особенностей ландшафта — роботизированные комплексы оснащают видеокамерами (рисунок 1) с высоким разрешением. Их обычно размещают в голове андроида. Благодаря камере (или нескольким камерам) машина может идентифицировать (распознать) окружающие объекты, оценить их размер и расстояние до предметов.
В зависимости от ландшафта или особенностей архитектуры здания робот способен принять решение о способе передвижения и смещении центра тяжести, например, при подъеме/спуске по ступеням или наклонным поверхностям, преодолении рва или препятствия.
(Рисунок 1. Глаз-видеокамера слежения робота)
Видеокамеры оснащают несколькими модулями для получения дополнительной информации:
- В инфракрасном диапазоне;
- В режиме тепловизора.
Кроме камер, конструкция роботов предусматривает использование системы датчиков, которые определяют пространственное положение андроида на местности или в помещении, силу сжатия манипуляторов, скорость перемещения и т.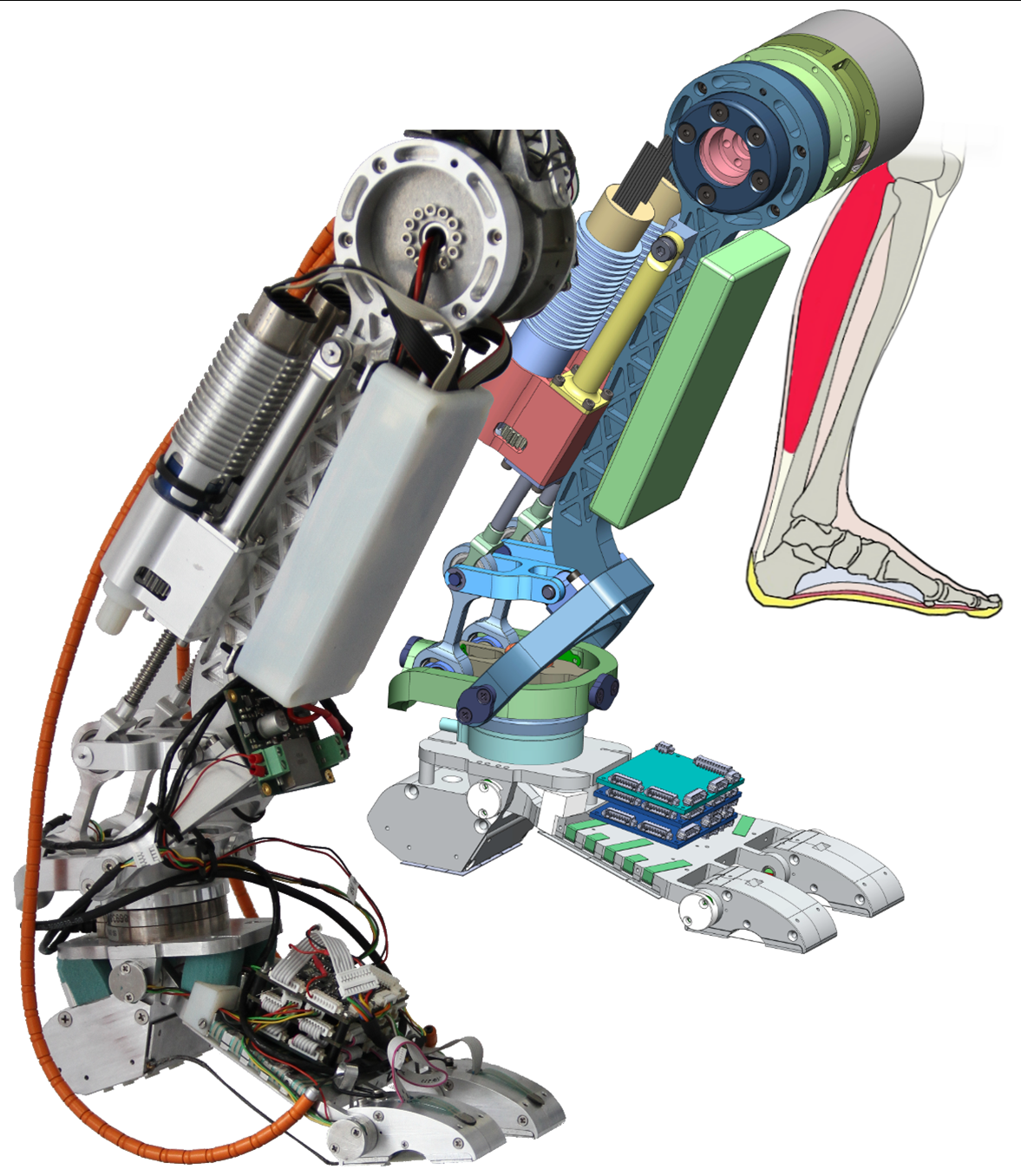
В самой защищенной и просторной части робота устанавливают электронные платы системы управления и автономные источники питания.
Во время выполнения миссии роботом управляет компьютер — набор микросхем, предназначенный для получения, накопления информации, ее обработки и отправления сигналов к исполняющим механизмам, работающих при помощи двигателей ( рисунок 2). Прогресс компьютерной техники позволяет устанавливать в андроиды все более совершенные системы анализа, способные использовать несколько наиболее продвинутых технологий:
- Распознавание объектов;
- Распознавание речи;
- Распознавание движений, жестов;
- Самообучение на основании получаемой информации;
- Запоминание внешнего вида объектов, лиц людей.
Поставить задачу перед андроидом можно программным способом, т.е. путем внесения перечня команд в ЦПУ, либо вербально, произнеся набор слов для начала выполнения задачи. Отдельные модели андроидов способны реагировать на жесты рук, изменение местоположения человека.
Система управления роботом очень напоминает построение нервной системы человека в зависимости от его развития:
- Прямое выполнение конкретных команд оператора;
- Необходимость постоянной корректировки действий андроида при выполнении общей задачи;
- Ввод конечной цели (указание направления действий).
В первом случае в памяти машины записаны команды, которые ЦПУ (центральный процессор) подает к исполнительным механизмам для выполнения определенных операций. Например, перемещение робота, изменение положения манипулятора и т.п. по команде оператора. Одна из самых дешевых и простых в изготовлении моделей.
При передвижении андроида из точки А к точке Б вмешательство оператора необходимо в случаях, когда набор алгоритмов (заранее записанных в память действий) не предусматривает преодоление сложных препятствий (к примеру).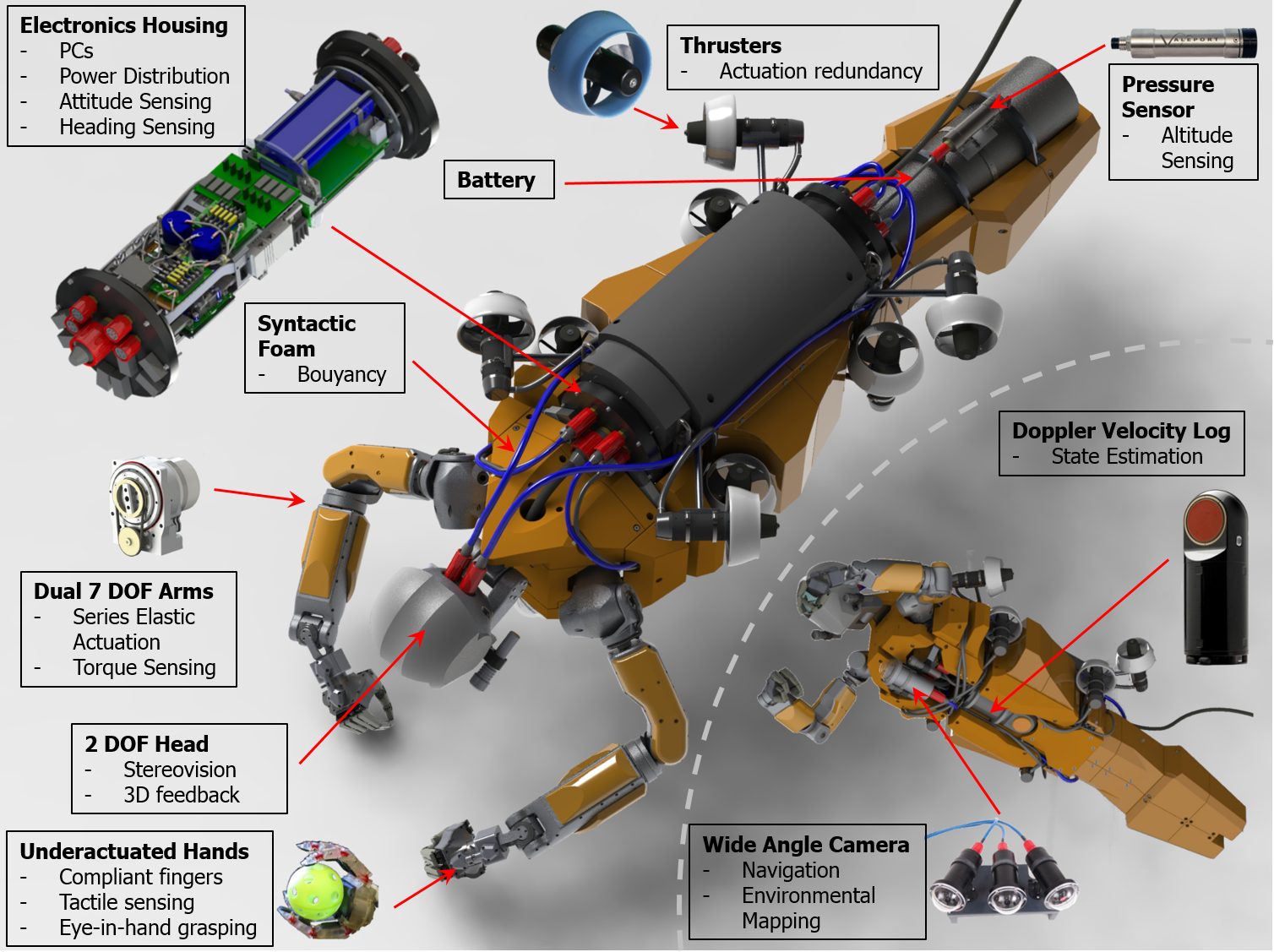
Более продвинутый интеллект, получив информацию от системы датчиков, видеокамер, самостоятельно оценивает обстановку и выбирает наиболее оптимальное решение самостоятельно.
(Рисунок 2. Двигатель постоянного тока)
Основным источником энергии для современных роботов-андроидов является электричество. Источник питания может быть:
- Автономным — аккумуляторы, солнечные батареи;
- Внешним — электроэнергия подается по кабелю.
В первом случае машина не привязана к энергоресурсу, способна выполнять задачи на любом удалении от зарядной станции. Из недостатков — увеличенный вес робота, малое время работы. Кабельное снабжение электроэнергией имеет свои плюсы: меньший вес андроида, возможность использования большего числа узлов, датчиков, механизмов, неограниченное время работы.
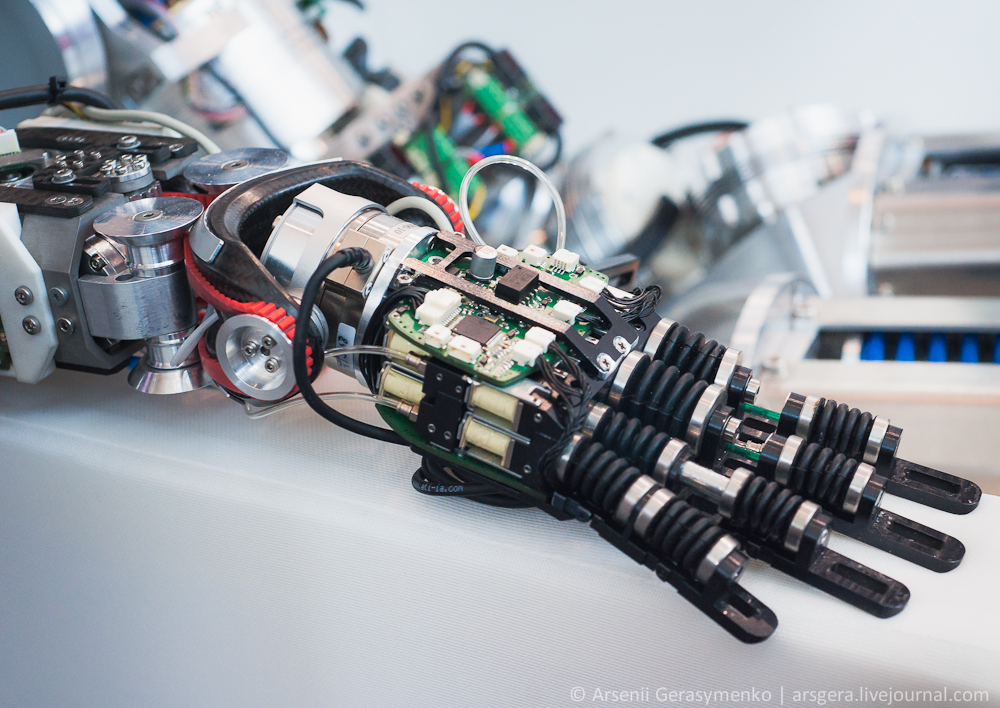
Манипуляторы копируют структуру рук человека (рисунок 3) и состоят из нескольких частей, соединенных шарнирами:
- Кистевого;
- Предплечья;
- Плечевого.

(Рисунок 3. Рука-манипулятор)
Манипуляторы имею несколько степеней свободы, т.е. робот может поднять руки, развести их в стороны, вращать кисти, производить захват предметов «пальцами». Манипуляторы приводятся в действие силовыми механизмами — сервоприводами. Часто для аккуратной и точной работы пальцы оснащают специальными датчиками, которые регулирую силу сжатия. Вместо грузозахватных приспособлений в кистевые отделы манипуляторов устанавливают другие приборы и механизмы: сварочные аппараты и т.д.
По аналогии со строением тела человека роботы-андроиды передвигаются шагами. Конструкция ног предусматривает возможность передвигаться бегом, преодолевать различные препятствия (лестницы, ямы, наклонные поверхности). Ноги, как и руки-манипуляторы, приводятся в действие двигателями (рисунок 4).
(Рисунок 4. Шаговой двигатель)
Для всех типов роботов используют несколько типов исполнительных механизмов:
- Механические;
- Электрические;
- Гидравлические;
- Пневматические;
- Гибриды (электромеханические, гидромеханические и т.
д.).
Из-за особенностей конструкции роботов-андроидов (небольшие габариты, система шасси — шагоход) для механизации узлов наиболее часто используют сервоприводы или сервомоторы (рисунок 5), основу которых составляет электрический двигатель.
(Рисунок 5. Сервомотор)
В отличие от обычного электромотора, комплектный сервопривод способен:
- С высокой точностью определять и изменять угол положения вала;
- Потреблять ровно столько электроэнергии, сколько необходимо для выполнения определенного действия;
- Снижать нагрузку на детали робота, увеличивая их ресурс.
Работа-действие робота
Пример работы всех систем робота-андроида в связке
- Тип робота: андроид
- Способ управления: автономный
- Задача: преодолеть лестничный пролет
- После включения питания загружается ЦПУ, которая проводит проверку всех систем.

- После получения подтверждения об исправности машины компьютер стабилизирует вертикальное положение андроида при помощи гироскопа, оценивает препятствие камерами.
- Установив дальность до первой ступени и ее высоту, расстояние до других близко расположенных объектов, робот начинает движение.
- Сервоприводы приводят в действие нижние конечности, которые поднимают опорные площадки (стопы) на нужную высоту.
- Равновесие машины поддерживает гироскоп.
- После преодоления последней ступени робот останавливается либо продолжает движение вперед в зависимости от программы или полученной команды.
Робот | Определение, история, использование, типы и факты
Робот-гуманоид
Просмотреть все СМИ
- Ключевые люди:
- Родни Брукс
- Похожие темы:
- реабилитационный робот три закона робототехники механический манипулятор AIBO андроид
Просмотреть весь связанный контент →
робот , любая машина с автоматическим управлением, которая заменяет человеческие усилия, хотя она может не напоминать людей по внешнему виду или выполнять функции, подобные человеческим.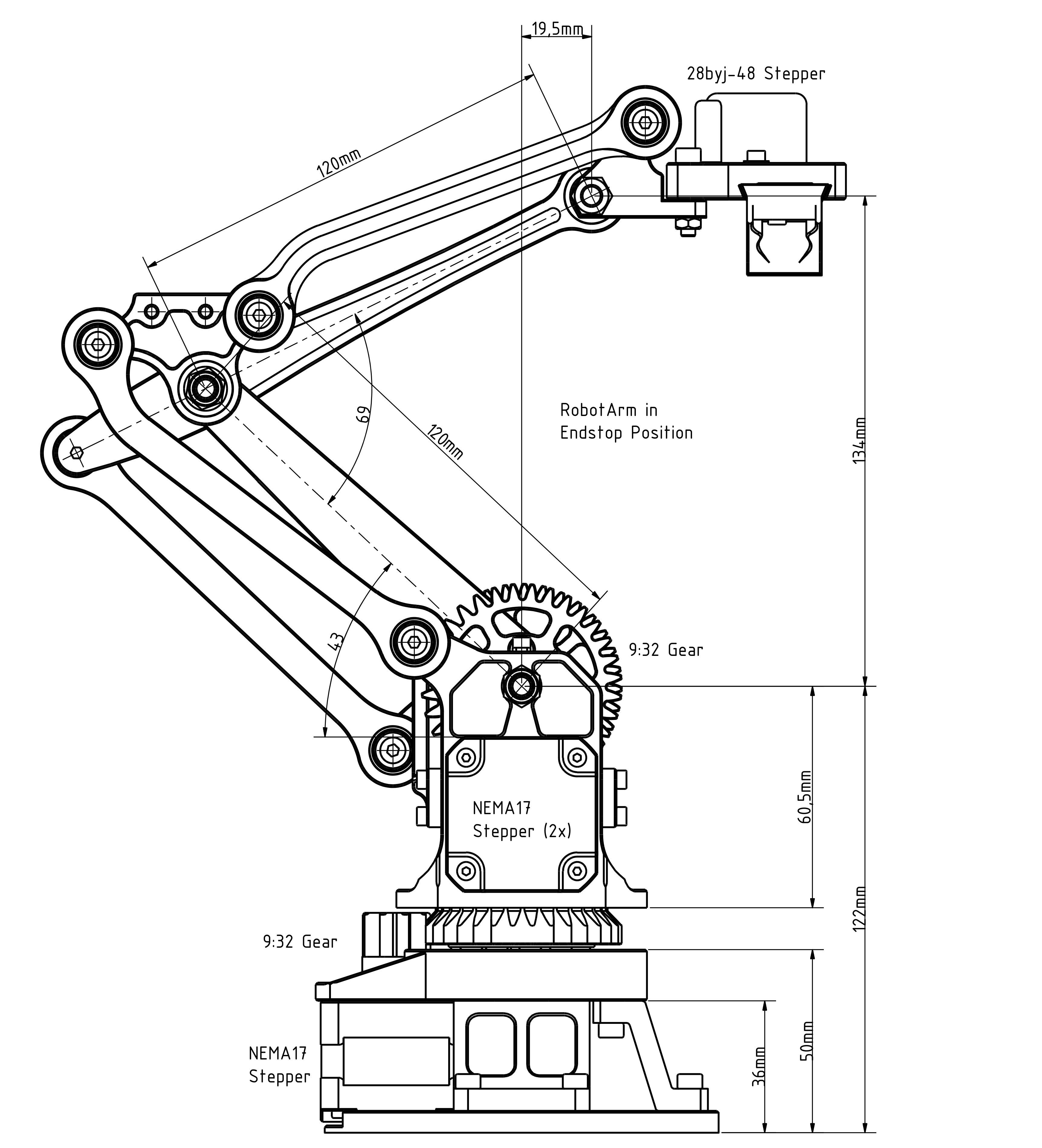 В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
Понятие об искусственных людях появилось раньше письменной истории ( см. автомат ), но современный термин робот происходит от чешского слова robota («принудительный труд» или «крепостной»), использованного в пьесе Карела Чапека руб. (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из « Франкенштейна » (1818) Мэри Шелли, или механическими, не уточнялось, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
Узнайте о трех законах робототехники Айзека Азимова
Посмотреть все видео к этой статье Слово робототехника впервые появилась в научно-фантастическом рассказе Айзека Азимова Runaround (1942). Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Обход также содержал знаменитые Три закона робототехники Азимова:
Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Обход также содержал знаменитые Три закона робототехники Азимова:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону.
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В этой статье прослеживается развитие роботов и робототехники. Дополнительную информацию о промышленном применении см. в статье по автоматизации.
Узнайте, как мехатроника помогает инженерам создавать высокотехнологичные продукты, такие как промышленные роботы
Просмотреть все видео к этой статье Хотя и не гуманоидные по форме, машины с гибким поведением и некоторыми человекоподобными физическими свойствами были разработаны для промышленности. Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 году американским инженером Джорджем Деволом и разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 году американским инженером Джорджем Деволом и разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Узнайте, как использование роботизированного конвейера для генетики бактерий делает работу ученых в Университетском колледже Корка менее сложной и более эффективной.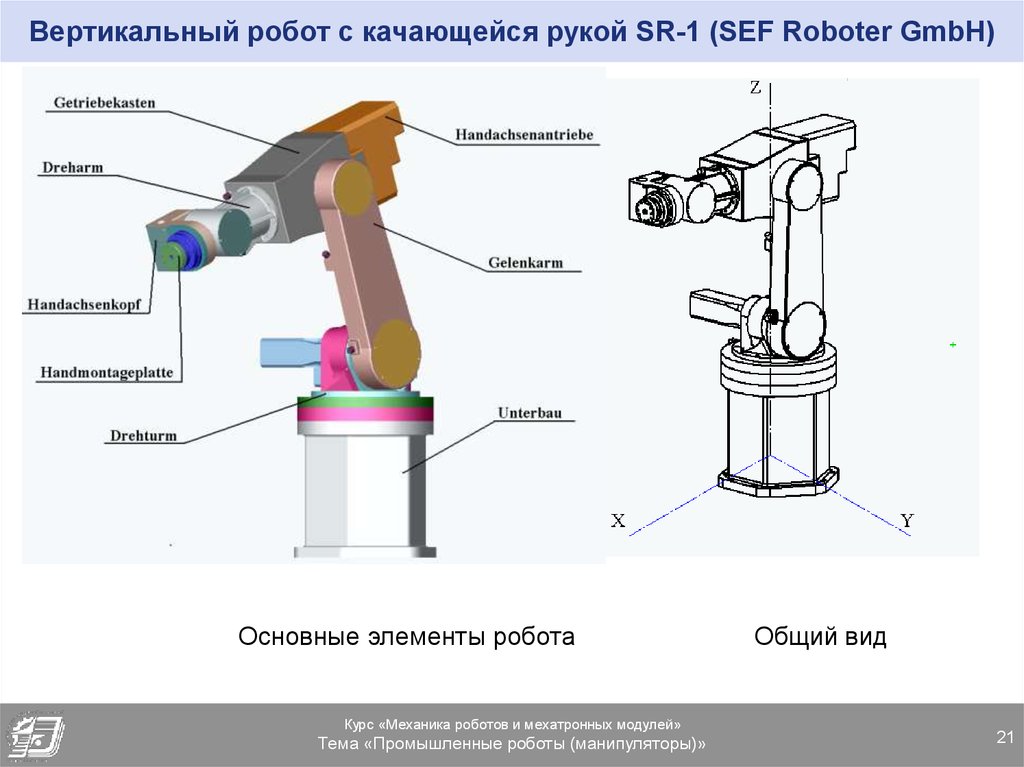
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подписаться сейчас Мобильные промышленные роботы также впервые появились в 1954 году. В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 19В 90-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (не менее трех из которых должны быть видны из любого места).
В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 19В 90-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (не менее трех из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в США, бизнес там не процветал. Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1919 году.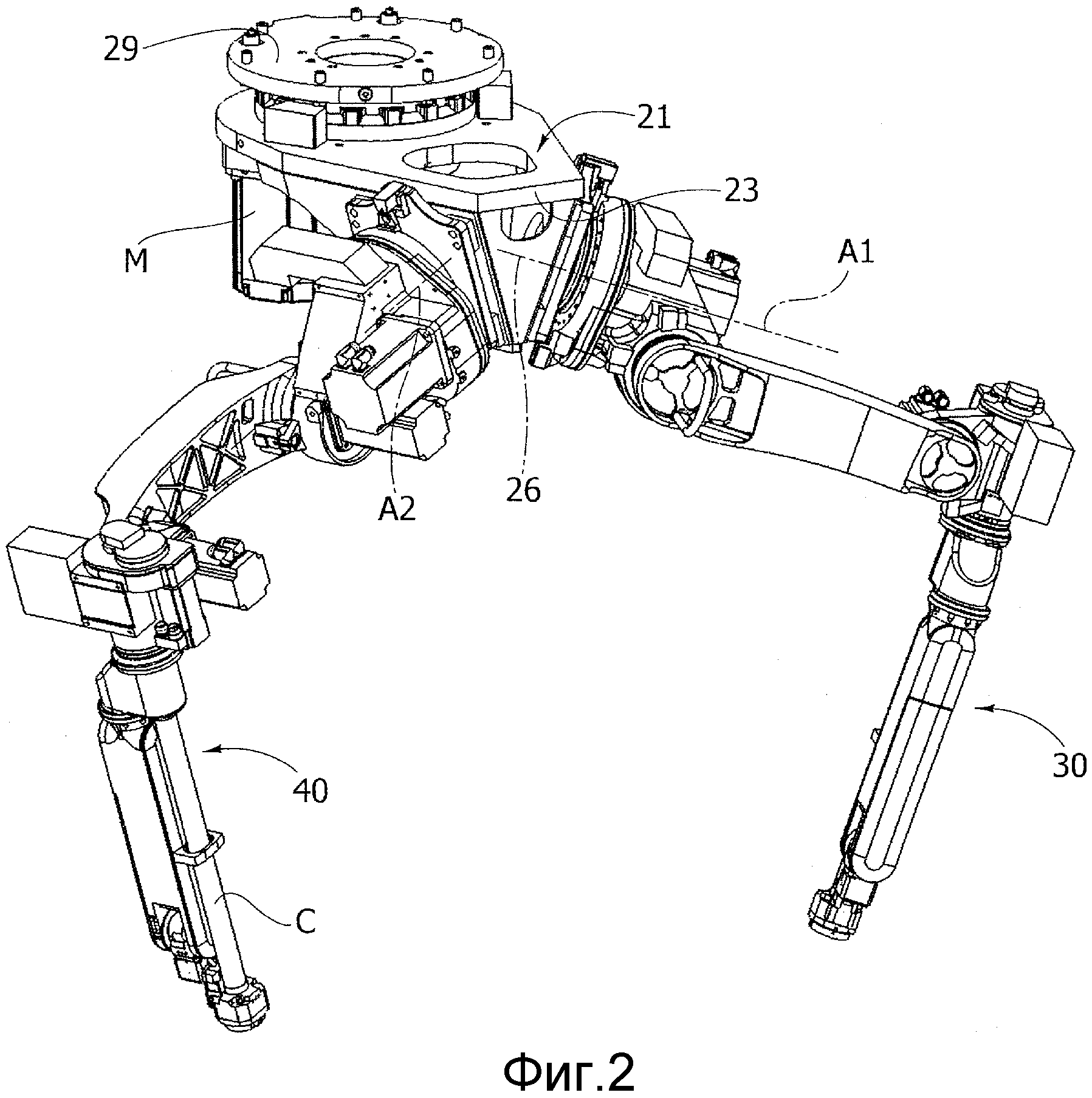 90 шведской фирме Asea Brown Boveri Ltd. Adept Technology, Inc., отделившаяся от Стэнфорда и Unimation для производства электрического оружия, является единственной оставшейся американской фирмой. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, а в 1980-х годах другие компании в Японии и Европе начали активно выходить на поле. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 19В 80-е годы Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокие затраты на рабочую силу в Европе также способствовали внедрению заменителей роботов, при этом в 2001 году количество промышленных роботов в Европейском союзе впервые превысило количество установок в Японии.
90 шведской фирме Asea Brown Boveri Ltd. Adept Technology, Inc., отделившаяся от Стэнфорда и Unimation для производства электрического оружия, является единственной оставшейся американской фирмой. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, а в 1980-х годах другие компании в Японии и Европе начали активно выходить на поле. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 19В 80-е годы Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокие затраты на рабочую силу в Европе также способствовали внедрению заменителей роботов, при этом в 2001 году количество промышленных роботов в Европейском союзе впервые превысило количество установок в Японии.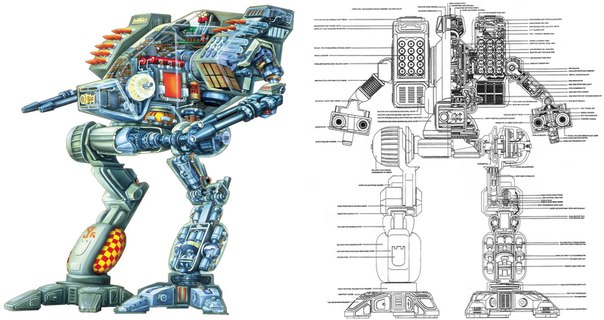
Отсутствие надежной функциональности ограничило рынок промышленных и сервисных роботов в офисе и дома). С другой стороны, игрушечные роботы могут очень надежно развлекаться, не выполняя задач, а механические разновидности существуют уже тысячи лет. ( См. автомат.) В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознавали голоса и слова. В 1999 году корпорация Sony представила робота, похожего на собаку, по имени AIBO, с двумя дюжинами моторов для активации его ног, головы и хвоста, двумя микрофонами и цветной камерой, координируемой мощным микропроцессором. Более реалистичные, чем когда-либо прежде, AIBO гонялись за цветными мячами и научились узнавать их владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первоначальный тираж в 5000 экземпляров сразу же был распродан через Интернет.
Я, Робот | Краткое изложение, персонажи и факты
Я, Робот , сборник из девяти рассказов писателя-фантаста Айзека Азимова, в котором рассказывается о развитии «позитронных» (человекоподобных, с формой искусственного интеллекта) роботов и борется с моральные последствия технологии. Рассказы впервые появились в научно-фантастических журналах между 1940 и 1950 годами, когда они были впервые опубликованы вместе в виде книги. Отношение Азимова к роботам как к запрограммированным этикам, а не как к мародерствующим металлическим монстрам, оказало большое влияние на развитие научной фантастики.
Рассказы впервые появились в научно-фантастических журналах между 1940 и 1950 годами, когда они были впервые опубликованы вместе в виде книги. Отношение Азимова к роботам как к запрограммированным этикам, а не как к мародерствующим металлическим монстрам, оказало большое влияние на развитие научной фантастики.
Сводка
Девять историй связаны обрамляющим повествованием, включающим интервью репортера со Сьюзен Кэлвин, бывшим робопсихологом из U.S. Robots and Mechanical Men, Inc., чья работа связана с нефункциональными роботами и проблемами, присущими взаимодействиям человека и робота. Истории сосредоточены на проблемах, возникающих в результате этического программирования, изложенных в знаменитых «Трех законах робототехники» Азимова:
.Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону.
Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому и Второму законам.
Действие первой истории «Робби» происходит в 1998 году и рассказывает о маленькой девочке Глории, которая любит своего робота-няню Робби. Однако ее мать приходит к выводу, что роботы небезопасны, и Робби возвращают на фабрику. Глория убита горем. Чтобы показать ей, что роботы — это машины, а не люди, родители водят ее посмотреть, как роботы собираются на фабрике. Одним из роботов-сборщиков является Робби. Глория рискует своей жизнью, бегая к Робби, и Робби спасает Глорию, убеждая мать Глории, что роботам можно доверять.
Следующие три истории происходят в течение 18 месяцев, начиная с 2015 года, и рассказывают о коллегах Кальвина Грегори Пауэлле и Майке Доноване, пытающихся выяснить, почему роботы работают со сбоями. В одном случае это конфликт между двумя законами робототехники; в другом робот отказывается подчиняться приказам человека, но тем не менее поступает правильно; в-третьих, робот не может управлять большим количеством подчиненных ему роботов.
Следующая история «Лжец!» происходит в 2021 году. Робот по имени Херби был ошибочно запрограммирован на телепатические способности. Чтобы не задеть чувства людей, с которыми он общается, Херби льстиво лжет. Кроме того, хотя Herbie знает об ошибке программирования, он знает, что исследователи хотят решить проблему самостоятельно и поэтому не будут им помогать. Кэлвин говорит Херби, что сокрытие информации и предоставление информации будут вредны для людей, и конфликт заставляет Херби отключиться.
В «Маленьком потерянном роботе», действие которого происходит в 2029 году, ученые, работающие в опасной среде, изменяют программу Первого закона некоторых роботов, чтобы они не мешали людям. После того, как разъяренный исследователь говорит одному из таких роботов потерять себя, робот прячется в группе идентичных, но немодифицированных роботов. Кэлвин разрабатывает несколько тестов, чтобы заставить робота идентифицировать себя, но робот перехитрил ее, пока она не основывает один тест на его превосходном физическом программировании. Затем модифицированные роботы уничтожаются.
Затем модифицированные роботы уничтожаются.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подписаться сейчасДонован и Пауэлл возвращаются для «Побега!», о позитронном суперкомпьютере, пытающемся понять, как создать космический корабль, который позволит экипажу пережить гиперпространственный прыжок. Прыжок в гиперпространство приводит к тому, что люди ненадолго прекращают свое существование, а суперкомпьютер справляется с необходимостью нарушить Первый закон, создавая космический корабль, наполненный розыгрышами.
Последние две истории происходят в 2032 и 2052 годах, соответственно, и касаются политика, который может быть роботом, а может и не быть, и планируют ли Машины, управляющие экономическими системами, войну против человечества.
Влияние
Три закона Азимова распространились по научной фантастике, и почти каждый робот в книгах или фильмах впоследствии создавался с их учетом. В конце 1970-х американский писатель Харлан Эллисон сотрудничал с Азимовым над сценарием для I, Robot 9.