
Корректор фар и его режимы
Корректор фар — это устройство, о существовании которого многие водители даже не догадываются. Но именно он позволяет избежать некоторых неприятных ситуаций.
Зачем нужен корректор
Корректор фар — устройство, благодаря которому можно регулировать направления пучка света оптики. Найти его можно на бортовой панели автомобиля. Это устройство выглядит как регулировочное колесико, которое имеет возможность принимать несколько положений. Обычно таких положений четыре: от 0 до 3. Благодаря этому колесику можно изменить направление света, исходящего от фар. Положение регулятора на цифре 3 позволяет опустить оптику, на цифре 0 — поднять ее.
На современных автомобилях такой корректор может отсутствовать, так как они оснащены автокорректором. Это устройство определяет, насколько загружена машина, и автоматически регулирует направление света фар. Однако не всегда эта система работает корректно.
Проблемы при неправильной настройке корректора
Корректор нужен для того, чтобы изменять направление пучка света фар. Не существует универсального положения оптики. То есть нельзя один раз настроить фары и забыть об этом. Регулировка направления света зависит от степени загруженности автомобиля.
Не существует универсального положения оптики. То есть нельзя один раз настроить фары и забыть об этом. Регулировка направления света зависит от степени загруженности автомобиля.
Когда задний багажник автомобиля сильно нагружен и в салоне сидят несколько пассажиров, его передняя часть поднимается. Если в таком положении включить фары в темное время суток, то свет будет направлен вверх. В результате при движении фары будут ослеплять водителей, которые едут навстречу. В такой ситуации необходимо воспользоваться регулятором и перевести его в положении 3, что позволит опустить оптику.
После разгрузки автомобиля можно забыть об изменении положения регулятора. И в следующий раз, когда вы поедете в автомобиле уже один, окажется, что фары освещают лишь небольшой участок дороги рядом с автомобилем. Нужно снова воспользоваться регулятором и перевести его в положении 0, что позволит поднять оптику. Благодаря этому фары снова будут хорошо освещать дорогу.
От чего зависит выбор значения регулятора корректора
Регулятор имеет несколько положений — от 0 до 3. Необходимо запомнить: чем больше загружена машина, тем больше должна стоять цифра на регуляторе. То есть 0 — это пустая машина (в ней сидит только водитель, багажник пустой), а 3 — это загруженная машина (в ней сидят несколько пассажиров, багажник полон). Чтобы ориентироваться в значениях регулятора, можно обратиться к следующим правилам настройки:
Необходимо запомнить: чем больше загружена машина, тем больше должна стоять цифра на регуляторе. То есть 0 — это пустая машина (в ней сидит только водитель, багажник пустой), а 3 — это загруженная машина (в ней сидят несколько пассажиров, багажник полон). Чтобы ориентироваться в значениях регулятора, можно обратиться к следующим правилам настройки:
- положение 0 — только водитель;
- положение 1 — заняты все пассажирские сидения;
- положение 2 — заняты все пассажирские сидения и немного загружен багажник;
- положение 3 — заняты все пассажирские сидения, полностью загружен багажник или осуществляется буксировка загруженного прицепа.
Что означают разные режимы регулировочного «колесика» корректора
Разные режимы регулятора означают степень поднятия оптики. Чем выше значение регулятора, тем ниже опущена оптика. То есть в положении колесика на цифре 3 фары максимально опущены вниз, а в положении 0 — максимально подняты вверх.
Корректор фар — это важное устройство, о котором должен знать каждый водитель, оно напрямую влияет на безопасность движения на дороге.
- Автор: Пелагея Журавлёва
- Распечатать
(7 голосов, среднее: 3.9 из 5)
Поделитесь с друзьями!Принцип работы корректора фар — Интернет-Клуб Для Автолюбителей
Содержание
- Принцип действия
- Системы принудительного действия
- Гидрокорректор
- Электромеханический корректор
- Принцип работы
- Характерные неисправности
- Системы автоматического управления корректором фар
Правильная граница светотени при движении ночью обеспечивает не только вашу безопасность, но и комфорт водителям встречных автомобилей. Рассмотрим, как работает корректор положения фар, устройство и принцип работы различных систем автоматической регулировки угла наклона фар.
Принцип действия
Корректор предназначен для регулировки уровня светотеневой границы в режиме ближнего света. Для режима дальнего света эта опция не так актуальна, потому что только ближний свет имеет четкую границу отсечки (условное ограничение светового потока, резко переходящего в почти неосвещенную зону). Ближний свет должен хорошо освещать дорогу, но не ослеплять водителей встречного транспорта.
Ближний свет должен хорошо освещать дорогу, но не ослеплять водителей встречного транспорта.
Уровень светотеневой границы зависит от формы и вертикального наклона отражателя. Именно последний параметр требует постоянной регулировки, поскольку угол наклона фар зависит от нагрузки и распределения нагрузки в транспортном средстве. Чем больше загружена задняя часть автомобиля, тем больше прогибается передняя часть автомобиля. Поэтому даже правильно расположенные фары ослепят водителей встречных машин.
В соответствии с требованиями, предъявляемыми к автомобилям европейского производства, корректор фар должен входить в стандартную комплектацию всех автомобилей, допущенных к эксплуатации после 1999 г. Такие системы не устанавливаются на автомобили с активной подвеской.
Системы принудительного действия
Управление системой регулировки угла наклона фар осуществляется путем изменения положения переключателя на приборной панели. Основными типами приводов, используемых в конструкции ручных корректоров, являются:
- механический.
 Конструкцию рефлектора-корректора назвать сложно, так как устройство представляет собой регулировочный винт, установленный в корпусе рефлектора. Ввинчивание или выкручивание винта изменяет угол вертикального дефлектора;
Конструкцию рефлектора-корректора назвать сложно, так как устройство представляет собой регулировочный винт, установленный в корпусе рефлектора. Ввинчивание или выкручивание винта изменяет угол вертикального дефлектора; - гидромеханический;
- электромеханический;
- пневматический. Пневматический корректор фар из-за своей сложности менее популярен. Систему можно настраивать вручную или автоматически. В первом случае управление пневмоприводами осуществляется водителем с помощью позиционного переключателя n на панели приборов (чаще всего используется в сочетании с галогенным освещением). Автоматизированная система состоит из датчиков положения кузова, блока управления и исполнительных механизмов (используются совместно с ксеноновыми лампами). Положение отражателя регулируется изменением давления воздуха в соответствующих трубках.
Гидрокорректор
Отечественным автомобилистам эта система известна, поскольку ручные корректоры фар этого типа устанавливались на автомобили ВАЗ 2107, 2109, 2110, 2114, «Нива», «Гранта».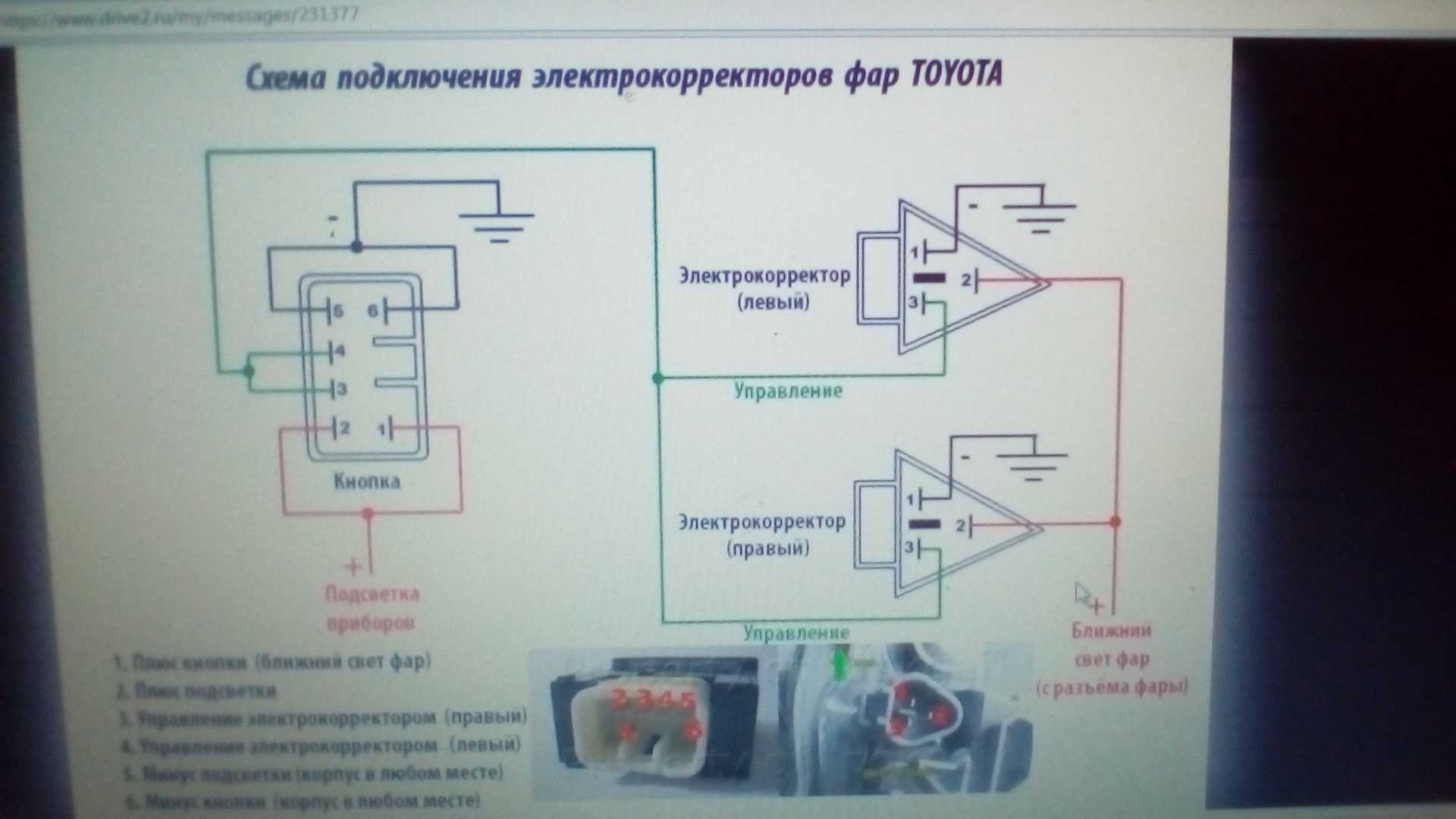
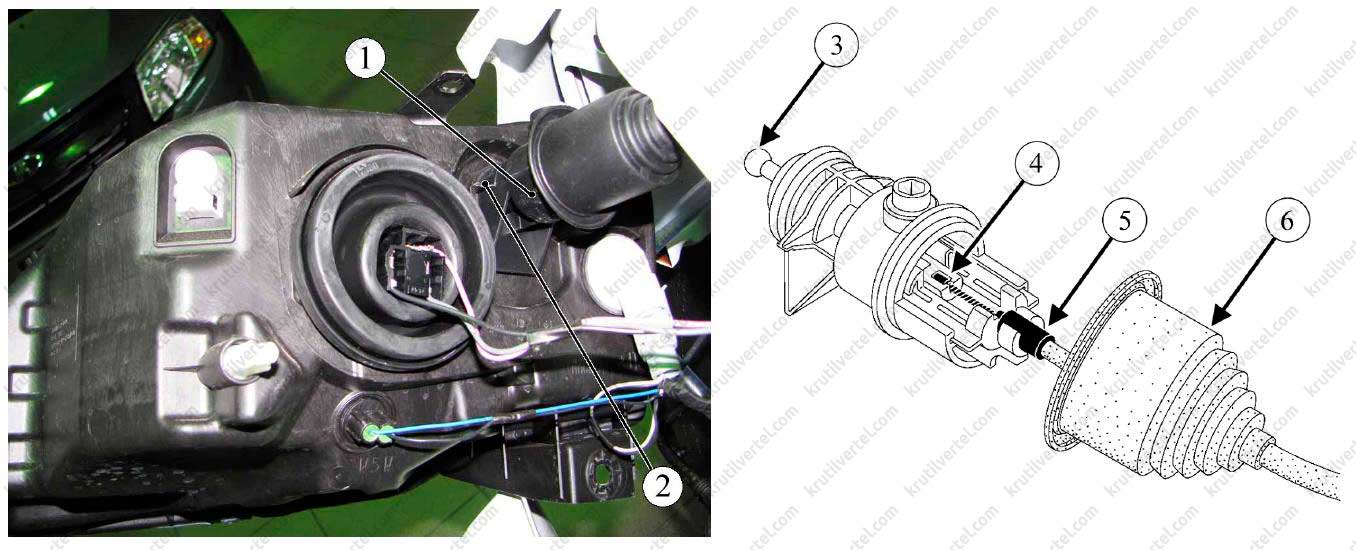
Основные элементы системы:
- 6 — ручка регулировки светового пучка;
- 1 — основной регулирующий механизм;
- 2 — рабочие цилиндры со штоком, действующим на отражатель.
Принцип действия заключается в регулировке положения планки корректора движением специальной жидкости по трубам. Переключатель механически связан с поршнем главного гидроцилиндра. Когда ручка регулировки приводится в действие, чтобы поднять дефлекторы, давление жидкости в системе увеличивается, что приводит в движение рабочие цилиндры и, таким образом, удлиняет шток. Поскольку система полностью герметична, поворот ручки дает противоположный эффект.
Эта архаичная система считается крайне ненадежной. Со временем на стыках труб и фланцах возникают утечки, в результате чего в систему засасывается воздух и происходит потеря жидкости.
Электромеханический корректор
Чаще всего используется электрическая система регулировки дефлектора фар. Электропривод позволяет как принудительное изменение высоты границы света и тени, так и автоматическую регулировку в зависимости от текущих условий движения.
Конструкция систем принудительного действия:
- включить приборную панель;
- мотор-редукторы;
- устройство управления;
- электрические кабели.
ВыключательОбычно он устанавливается с левой стороны рулевой колонки и имеет 3–4 положения фиксации для изменения угла наклона дефлектора фары. Сервопривод, он же мотор-редуктор, он же корректор фар, представляет собой исполнительный механизм, шток которого при движении поднимает или опускает фару, опираясь на ее нижнюю часть (фара прикреплена к петлям вверху).
Принцип работы
В принципе, конструкция сервоприводов аналогична мотор-редуктору, используемому в конструкции центрального замка. Оборудование:
- Небольшой двигатель постоянного тока, возбуждаемый магнитами;
- червячную передачу для преобразования вращательного движения вала двигателя в возвратно-поступательное движение оправки;
- схемы управления;
- датчик сопротивления фактического положения штока поршня.

ЭБУ регулирует положение ручки, подавая управляющее напряжение на сервопривод. Логика управления корректорами фар с электромеханическим приводом на примере БУК 02-01 применяется во многих отечественных автомобилях. Одним из основных компонентов платы управления является мостовая схема мотор-редуктора, в основе которой лежит двухканальный операционный усилитель. Одно плечо моста соединено с датчиком фактического положения штока, а другое плечо соединено с входным контактом платы управления. Воздействие на исполнительный механизм корректора осуществляется изменением управляющего воздействия на входе платы. В случае ошибки несоответствия моста система управления подает напряжение на исполнительный механизм до тех пор, пока напряжение на выходах датчика положения не станет равным управляющему напряжению. Электронный блок управления в обязательном порядке должен быть оборудован устройством защиты от перенапряжения в бортовой сети автомобиля. Когда переключатель электромеханического корректора фар не меняет своего положения, электродвигатель отключается.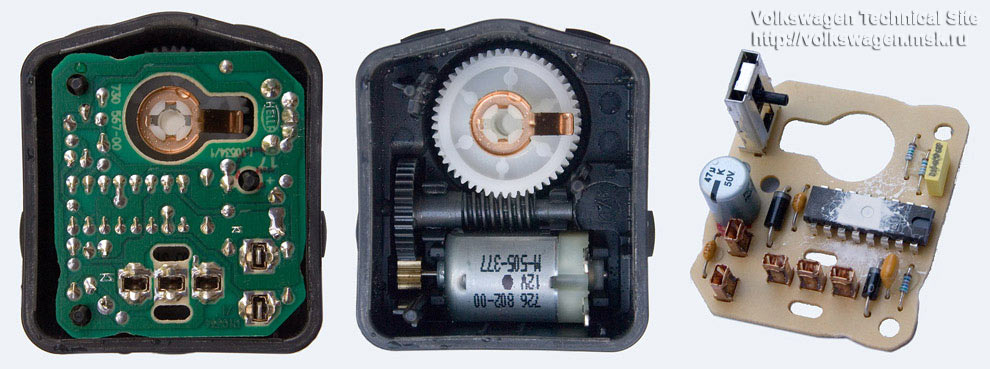
Характерные неисправности
- Обрыв цепи, образование оксидов в местах соединения.
- Износ деталей электродвигателя.
- Прогорание элементов интегральных схем.
Системы автоматического управления корректором фар
Автоматический корректор положения фар не требует участия водителя в настройке границы света и тени. Система, используемая в галогенных лампах, основана исключительно на положении кузова автомобиля, поэтому ее еще называют статической.
В автомобилях с ксеноновыми источниками света используется усовершенствованная система адаптивного затемнения, которая удерживает световой луч в фиксированном положении, регулируя положение кузова автомобиля при ускорении, замедлении, изменении направления и движении по ухабистой дороге. Он определяется таким образом, что прямой свет ксеноновых фар гораздо более агрессивен для человеческого глаза.
Системный дизайн:
- датчики дорожного просвета автомобиля;
- устройство управления;
- сервоприводы (обычные электромеханические мотор-редукторы).

Датчик из установочного комплекта ксенона своими руками.
В основе принципа действия лежит постоянное считывание дорожного просвета автомобиля. Для этого используются бесконтактные датчики на эффекте Холла. Обычно несколько датчиков устанавливаются на несущих элементах кузова спереди и сзади. В корпусе находится статор (подвижный элемент) со встроенными магнитами и ротор (неподвижный элемент), который является датчиком Холла. Статор соединен стержнем с элементом подвески, поэтому любое изменение положения этого элемента относительно корпуса передается датчиком на ЭБУ. ЭБУ обрабатывает полученную информацию и контролирует работу мотор-редукторов. Несмотря на очевидное удобство, автоматический эквалайзер часто дооснащается системой, допускающей ручную настройку.
В конструкции можно использовать только один датчик положения тела ультразвукового типа. Чаще Такое решение предлагается в качестве альтернативы бортовых системах при самоклентации ксеноновых ламп.
Регулятор уровня фар Функция Все, что вам нужно знать
Когда речь идет о безопасности вождения в ночное время, фары вашего автомобиля являются одним из наиболее важных компонентов. Они не только обеспечивают лучший обзор дороги впереди, но и предупреждают других водителей о вашем присутствии. Однако есть транспортные средства, движущиеся в обратном направлении. Когда ваши фары расположены под большими углами, их видимость сильно страдает. Переключение на ближний свет обычно является хорошей идеей для борьбы с этим, но иногда даже этого недостаточно, и тогда в игру вступает опция корректора фар.
Они не только обеспечивают лучший обзор дороги впереди, но и предупреждают других водителей о вашем присутствии. Однако есть транспортные средства, движущиеся в обратном направлении. Когда ваши фары расположены под большими углами, их видимость сильно страдает. Переключение на ближний свет обычно является хорошей идеей для борьбы с этим, но иногда даже этого недостаточно, и тогда в игру вступает опция корректора фар.
Назначение корректора фар
Предположим, вы путешествуете с включенными фарами ближнего света и большим грузом в багажнике. Или когда заднее сиденье полностью заполнено. Это увеличит нагрузку на заднюю подвеску и заставит автомобиль наклоняться ниже. Из-за этого фары также будут немного наклонены вверх. Это не только приведет к плохому освещению дороги перед вами, но и приведет к ослеплению приближающихся транспортных средств.
Как использовать корректор фар?
Корректор фар управляется поворотной ручкой с правой стороны рулевой колонки. Цифры от 0 до 5 будут на этой ручке. Убедитесь, что ручка установлена на ноль, когда баланс вашего автомобиля идеален и вы едете один. Однако, когда вам нужно использовать регулятор уровня фар, попробуйте повернуть ручку в разные стороны, чтобы получить идеальный баланс для вас.
Убедитесь, что ручка установлена на ноль, когда баланс вашего автомобиля идеален и вы едете один. Однако, когда вам нужно использовать регулятор уровня фар, попробуйте повернуть ручку в разные стороны, чтобы получить идеальный баланс для вас.
Дальний и ближний свет
Начнем с обзора многих обстоятельств, для которых предназначены фары дальнего и ближнего света. Фары дальнего света, как следует из названия, излучают свет далеко впереди вас на дороге, позволяя вам видеть предметы на расстоянии. Однако это означает, что эти огни уменьшают видимость водителей на встречной полосе. В результате они идеально подходят для вождения в сельской местности или на узких дорогах с плохим освещением или без него. Когда дорога хорошо освещена, водитель всегда должен переключаться на ближний свет, который обеспечивает достаточное освещение, не мешая обзору встречного транспорта.
Автоматические корректоры фар
Некоторые автомобили полностью исключают необходимость регулировки фар.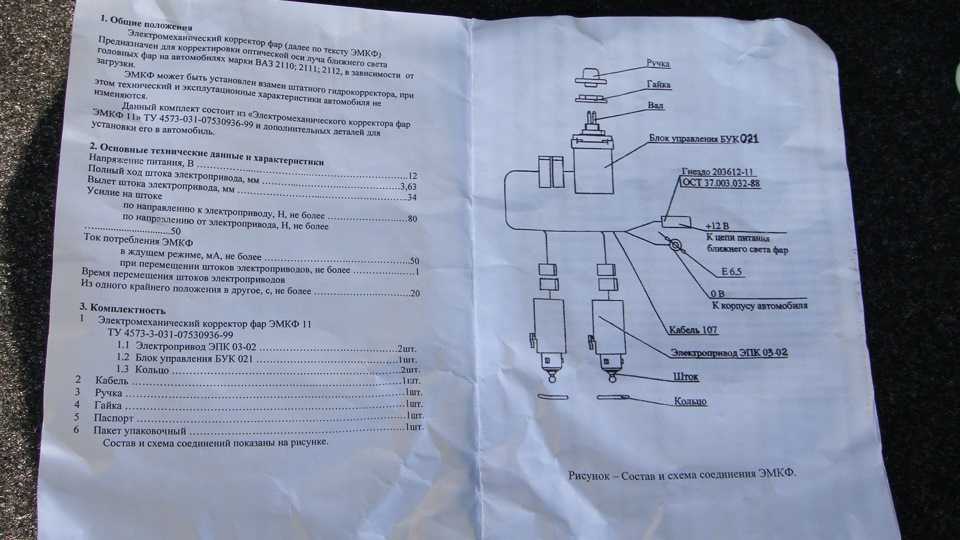 Они могут выполнить эту работу за вас с помощью функции автоматического корректора фар. В этих автомобилях используются датчики для определения влияния веса на заднюю подвеску. Эти автомобили автоматически наклоняют фары до нужного уровня, если удар превышает указанный порог.
Они могут выполнить эту работу за вас с помощью функции автоматического корректора фар. В этих автомобилях используются датчики для определения влияния веса на заднюю подвеску. Эти автомобили автоматически наклоняют фары до нужного уровня, если удар превышает указанный порог.
- Читайте также:
- Hyundai Sports Coupe | Хронология Hyundai Sports Coupe
- Внедорожники с турбонаддувом и безумной мощностью | Топ-5 внедорожников с турбонаддувом
- Редкие автомобили Nissan – 12 автомобилей Nissan, которые редко встречаются
- Dopdge Muscle Car, Топ-5 самых быстрых Dodge Muscle Cars
- Самые редкие автомобили в мире | Топ-5 редких автомобилей
Присоединяйтесь к нам: Facebook | WhatsApp | Instagram
Заявка на патент США для метода определения наклона автомобиля и системы автоматического выравнивания фар с использованием той же заявки на патент (заявка № 20100309674, опубликовано 9 декабря 2010 г.
 ) ОБЛАСТЬ ИЗОБРЕТЕНИЯ
) ОБЛАСТЬ ИЗОБРЕТЕНИЯ Настоящее изобретение относится к способу определения наклона транспортного средства, в частности к способу, использующему технологию обработки изображения для определения наклона транспортного средства и автоматического выравнивания фар. систему с помощью метода.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯФара играет важную роль в обеспечении видимости для водителей в ночное время. См. фиг. 1. В стандарте США FMVSS 108 (Федеральный стандарт безопасности транспортных средств) содержатся правила, касающиеся фар и заднего зеркала. EU ECE R48 (Регламент № 48 Европейской экономической комиссии Европейского союза) также содержит положения, касающиеся параметров фар, таких как высота установки фары h 2 , угол θ, под которым фара проецируется на землю, форма фары, длина R зоны освещения фары.
Однако фара может иметь некоторые проблемы на наклонной дороге.
Таким образом, были предложены некоторые автоматические устройства регулировки уровня фар в режиме реального времени. Например, датчик наклона использует переменные резисторы, соответственно установленные на передней оси и задней оси, для определения наклона транспортного средства, при этом наклон кузова транспортного средства вызывает изменение сопротивления, а угол наклона определяется по разнице между лобовое сопротивление и заднее сопротивление, за счет чего регулируется угол проекции θ фар. Однако установка вышеупомянутого датчика наклона очень сложна. Кроме того, датчик наклона выступает за пределы шасси и может быть поврежден при столкновении или других внешних факторах.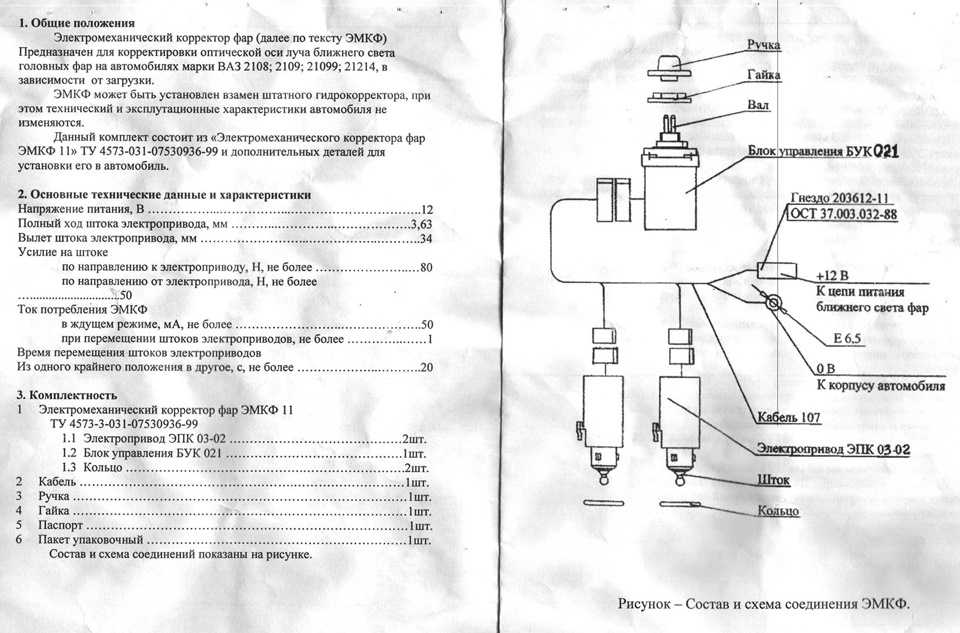
Соответственно, настоящее изобретение предлагает способ определения наклона транспортного средства и автоматическую систему регулировки уровня фар, использующую его для преодоления вышеупомянутых проблем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ Основная цель настоящего изобретения состоит в том, чтобы предложить способ определения наклона транспортного средства и систему автоматического регулирования уровня фар, использующую его, которые могут заранее узнавать состояние дороги перед транспортным средством, определять угол наклона автомобиля в зависимости от состояния дороги и регулировка фар в режиме реального времени, чтобы иметь соответствующий диапазон освещения.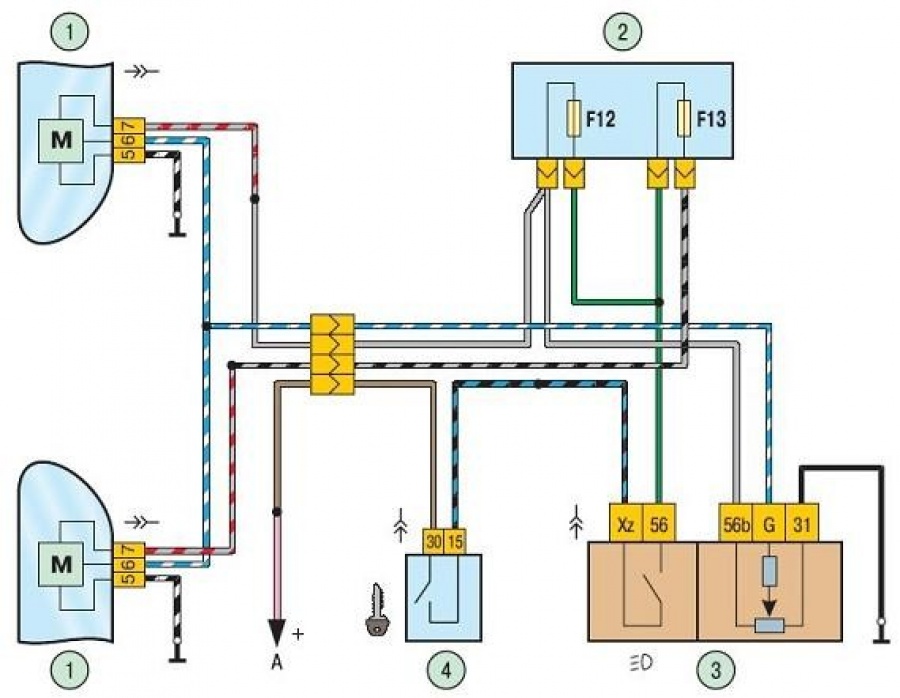
Другая цель настоящего изобретения состоит в том, чтобы предложить способ определения наклона транспортного средства и систему автоматического выравнивания фар, использующую его, которая может поддерживать соответствующий диапазон освещения путем регулировки фар в соответствии с нагрузкой или состоянием дороги для улучшения освещения. эффект и повысить безопасность ночного вождения.
Еще одна цель настоящего изобретения состоит в том, чтобы предложить способ определения наклона транспортного средства и систему автоматического выравнивания фар, использующую его, при этом технология обработки и распознавания изображений используется для создания тонкого и эффективного метода определения наклона для прогнозирования состояние пересеченной дороги перед автомобилем.
Еще одна цель настоящего изобретения состоит в том, чтобы предложить способ определения наклона транспортного средства и систему автоматического выравнивания фар, использующую его, которая обнаруживает линии разметки полосы движения и расширяет линии разметки полосы движения, чтобы получить точку схода перед транспортным средством и оценить угол наклона автомобиля, при этом фары регулируются для поддержания надлежащего эффекта освещения.
Для достижения вышеупомянутых целей в настоящем изобретении предлагается способ определения наклона транспортного средства, который включает этапы: получение изображения дороги перед транспортным средством; обработку изображения дороги для получения по меньшей мере одной мгновенной линии разметки полосы движения; продление мгновенной линии разметки полосы движения для получения мгновенной точки схода; установление мгновенной горизонтальной линии, проходящей через мгновенную точку схода; вычисление из изображений смещения между мгновенной горизонтальной линией и исходной горизонтальной линией, полученной, когда транспортное средство находится в абсолютно горизонтальной плоскости; и вычисляют угол наклона транспортного средства с учетом смещения и фокусного расстояния устройства захвата изображения на транспортном средстве.
Угол наклона, полученный с помощью способа по настоящему изобретению, может быть применен к системе регулировки уровня фар или системе управления подвеской автомобиля.
Ниже варианты осуществления подробно описаны вместе с приложенными чертежами, чтобы облегчить понимание целей, технического содержания, характеристик и достижений настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙРИС. 1 представляет собой схему, схематически показывающую параметры, относящиеся к фарам, используемые в US FMVSS 108 и EU ECE R48;
РИС. 2 представляет собой блок-схему, схематически показывающую архитектуру системы автоматического регулирования уровня фар в соответствии с настоящим изобретением;
РИС. 3 представляет собой блок-схему способа определения наклона транспортного средства в соответствии с настоящим изобретением;
РИС.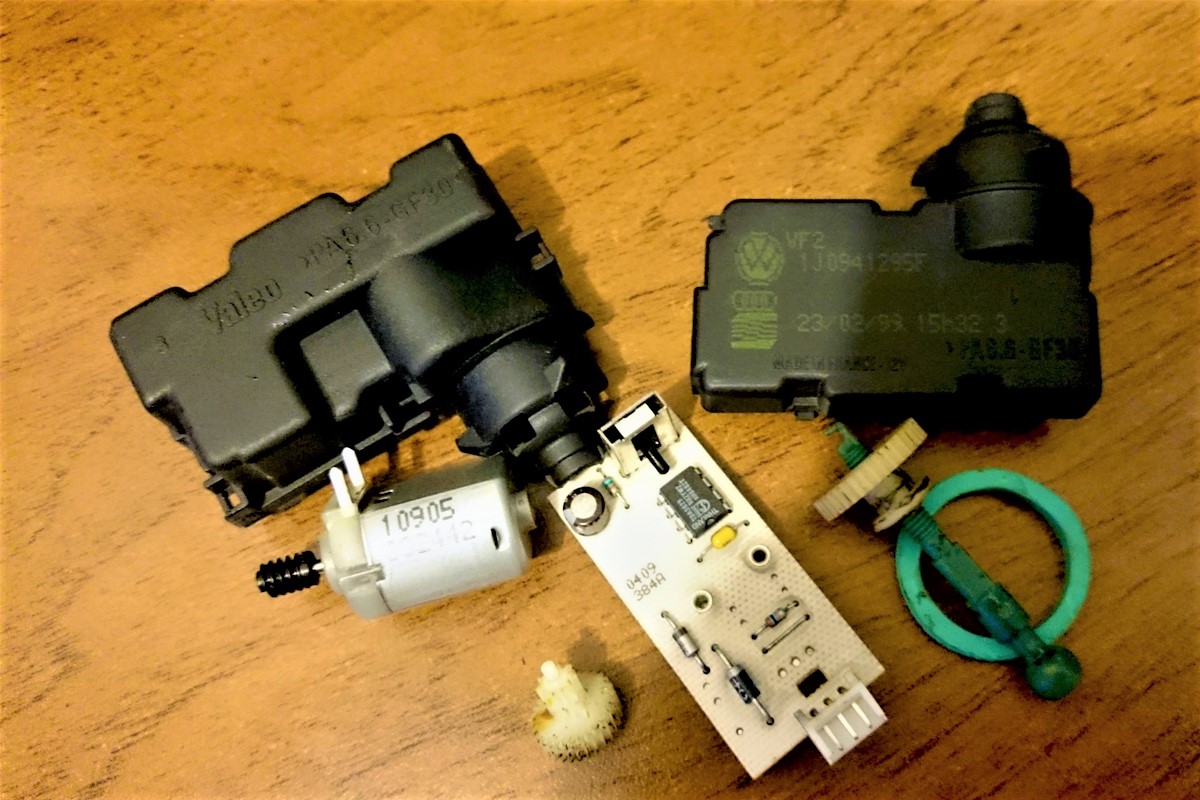 4 представляет собой схему, схематически показывающую взаимосвязь смещения и исходной горизонтальной линии согласно настоящему изобретению;
4 представляет собой схему, схематически показывающую взаимосвязь смещения и исходной горизонтальной линии согласно настоящему изобретению;
РИС. 5 представляет собой схему, схематически показывающую соотношение фокусного расстояния камеры и исходной горизонтальной линии согласно настоящему изобретению;
РИС. 6 представляет собой диаграмму, схематически показывающую этап определения дня или ночи в соответствии с настоящим изобретением;
РИС. 7 представляет собой блок-схему процесса идентификации линий разметки дорожек в соответствии с настоящим изобретением;
РИС. 8 представляет собой блок-схему процесса установки мгновенных линий разметки полосы движения в соответствии с настоящим изобретением;
РИС. 9 представляет собой блок-схему процесса обновления модели линий разметки дорожек в соответствии с настоящим изобретением;
РИС. 10( a )- 10 (c ) схематически показаны применение настоящего изобретения к случаю, когда транспортное средство движется вверх по склону; и
РИС.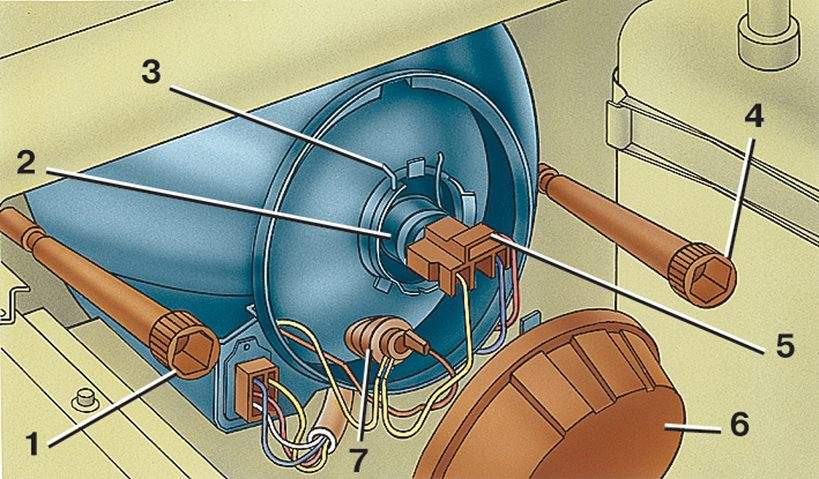 11( a )- 11 ( c ) представляют собой диаграммы, схематически показывающие, что настоящее изобретение применимо к случаю, когда транспортное средство движется вниз по склону.
11( a )- 11 ( c ) представляют собой диаграммы, схематически показывающие, что настоящее изобретение применимо к случаю, когда транспортное средство движется вниз по склону.
В способе определения наклона транспортного средства по настоящему изобретению сначала захватывается изображение дороги перед транспортным средством. Затем технология обработки/анализа изображения используется для обработки и анализа захваченного изображения, чтобы узнать состояние дороги перед транспортным средством. Ниже транспортное средство, имеющее систему автоматического выравнивания фар, использующую способ определения наклона автомобиля, используется в качестве предпочтительного варианта осуществления для иллюстрации технологии настоящего изобретения. Однако настоящее изобретение не ограничено вариантом осуществления. Любое устройство, использующее способ определения наклона автомобиля, также входит в объем настоящего изобретения.
Обычное транспортное средство должно иметь как минимум две фары. Настоящее изобретение должно быть продемонстрировано с помощью предпочтительного варианта осуществления, в котором автоматическая система регулировки уровня фар реализует способ определения наклона транспортного средства согласно настоящему изобретению. См. фиг. 2 — блок-схема, схематично показывающая архитектуру системы автоматического регулирования уровня фар в соответствии с настоящим изобретением. В этом варианте система автоматического корректора фар содержит устройство захвата изображения 10 , блок 20 обработки изображений, содержащий процессор данных 30 , и два контроллера регулировки уровня 50 . Устройство 10 захвата изображения, блок 20 обработки изображения и процессор данных 30 совместно образуют каркас 40 системы автоматического регулирования уровня фар согласно настоящему изобретению. Устройство захвата изображения 10 может быть реализовано с помощью устройства ПЗС (устройства с зарядовой связью) или устройства КМОП (комплементарного металлооксидного полупроводника). Устройство захвата изображения
Устройство захвата изображения 10 может быть реализовано с помощью устройства ПЗС (устройства с зарядовой связью) или устройства КМОП (комплементарного металлооксидного полупроводника). Устройство захвата изображения 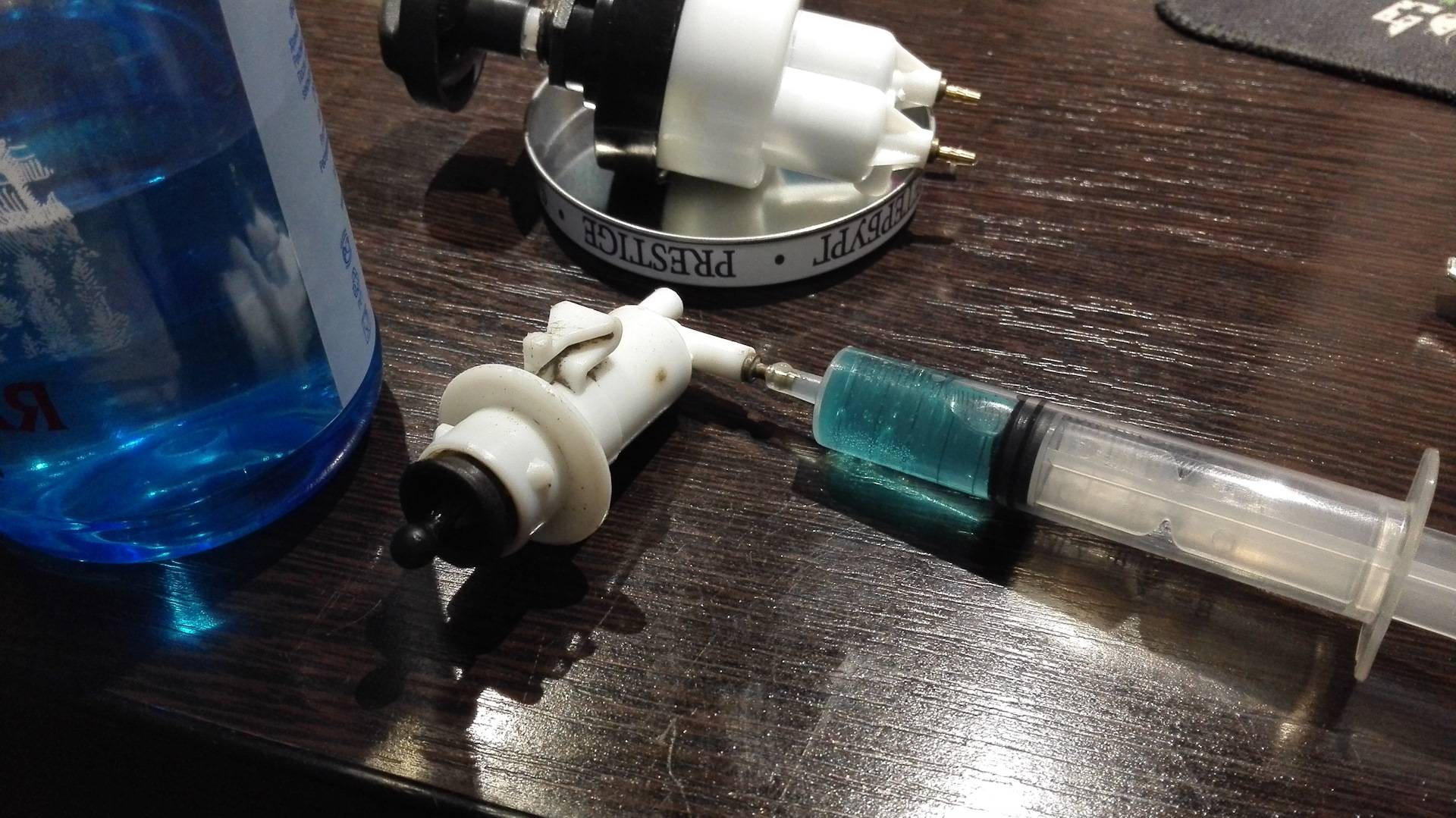 Разумно утверждать, что любая модификация или изменение в соответствии с сущностью настоящего изобретения также является вариантом осуществления настоящего изобретения и входит в объем настоящего изобретения.
Разумно утверждать, что любая модификация или изменение в соответствии с сущностью настоящего изобретения также является вариантом осуществления настоящего изобретения и входит в объем настоящего изобретения.
См. РИС. 3 — блок-схема способа определения наклона транспортного средства, примененного к системе автоматического регулирования уровня фар в соответствии с настоящим изобретением. На этапе S 1 запускается система автоматического регулирования уровня фар. Систему можно запустить одновременно с запуском автомобиля. В качестве альтернативы водитель может запустить систему в соответствующее время. На этапе S 2 система определяет, запускается ли она в первый раз, или водитель определяет, калибровать ли базовую горизонтальную линию H; если ответ «да», процесс переходит к шагу 3 ; если ответ «нет», процесс переходит к этапу 4 . На этапе S3 установление исходной горизонтальной линии H основано на предположении, что транспортное средство загружено равномерно и расположено в абсолютно горизонтальной плоскости. См. фиг. 4. В это время, на этапе S 31 , процессор данных 30 расширяет линии разметки полосы движения L L и L R вдаль, чтобы сформировать визуальную точку схода, которая является начальной точкой схода P, наблюдаемой оператором. устройство захвата изображения 10 . На этапе S 32 горизонтальная линия, проходящая через исходную точку схода P, используется в качестве исходной горизонтальной линии H. После этапа S 3 процесс переходит к этапу S 4 для захвата изображения дороги в перед автомобилем. См. фиг. 5 — диаграмма, демонстрирующая взаимосвязь угла, фокусной точки и исходной горизонтальной линии, наблюдаемой устройством захвата изображения 10 в транспортном средстве, которое движется вверх по склону или в направлении вверх при неравномерной нагрузке. Связь выражается уравнением (1):
См. фиг. 4. В это время, на этапе S 31 , процессор данных 30 расширяет линии разметки полосы движения L L и L R вдаль, чтобы сформировать визуальную точку схода, которая является начальной точкой схода P, наблюдаемой оператором. устройство захвата изображения 10 . На этапе S 32 горизонтальная линия, проходящая через исходную точку схода P, используется в качестве исходной горизонтальной линии H. После этапа S 3 процесс переходит к этапу S 4 для захвата изображения дороги в перед автомобилем. См. фиг. 5 — диаграмма, демонстрирующая взаимосвязь угла, фокусной точки и исходной горизонтальной линии, наблюдаемой устройством захвата изображения 10 в транспортном средстве, которое движется вверх по склону или в направлении вверх при неравномерной нагрузке. Связь выражается уравнением (1):
θ=tan-1a-bf(1)
, где θ — прилежащий угол, создаваемый вращением центральной оси объектива камеры, b начальная точка схода на плоскости изображения, a мгновенная точка схода на плоскости изображения, f расстояние между объективом и плоскостью изображения (т. е. фокусное расстояние).
е. фокусное расстояние).
Если ответ «нет» на этапе S 2 , это означает, что существуют существующая исходная точка схода P и существующая исходная горизонтальная линия H. Таким образом, процесс непосредственно переходит к этапу S9.0022 4 для включения камеры захвата изображения 10 для захвата изображения дороги перед транспортным средством 100 . На этапе S 4 захваченное изображение отправляется в блок 20 обработки изображения, и блок 20 обработки изображения делит изображение на блок A, блок B и блок C, где блок A и блок B являются в верхней половине изображения, а блок C — в нижней половине изображения. Затем процесс переходит к этапу S 5 для обработки изображений блока А и блока В для определения окружающего освещения. См. фиг. 6. Определение внешней освещенности для того, чтобы определить, день сейчас или ночь. Блок А и Блок Б разделены линиями на несколько горизонтальных секций. Уравнения (2) и (3) используются для расчета значений яркости пикселей в Блоке А и Блоке В:
Уравнения (2) и (3) используются для расчета значений яркости пикселей в Блоке А и Блоке В:
∑x∑ygrey , где серый — это уровень серого каждого пикселя, th темный — порог темноты, TH ночь — порог ночи, а TH день — порог дня. Значения яркости Блока А и Блока В сравниваются с пороговыми значениями. Когда значения яркости ниже, чем TH night , это определяется как ночь. Когда значения яркости больше TH день , это день. Когда определено, что это день, процесс переходит к этапу S 14 и на этом заканчивается. Когда определено, что сейчас ночь, процесс переходит к этапу S 6 для идентификации линий разметки полосы движения. Однако определение того, день сейчас или ночь, не ограничивается вышеупомянутой мерой, а может быть реализовано с помощью фотодатчика или путем проверки того, включены ли фары. См. РИС. 7 блок-схема процесса идентификации линий разметки дорожек. На шаге S 6 , нижняя половина изображения — блок C используется для обозначения линий разметки полосы движения. Во-первых, на этапе S61 выполняется идентификация высокого уровня серого. Затем на этапах S62 и S63 соответственно выполняются идентификация границы линии разметки полосы движения и идентификация ширины полосы движения. Изображение анализируется для получения характерных точек линий разметки дорожек (на чертежах не показаны). Нижняя половина изображения сканируется по частям снизу вверх методом ROI для обновления положения характерных точек линий разметки дорожек в режиме реального времени. Если характерные точки найдены только на одной стороне дороги, процесс переходит к этапу S9.0022 64 для установки мгновенной линии разметки полосы движения. Если характерные точки обнаружены на обеих сторонах дороги, процесс переходит к этапу S65, и блок 20 обработки изображения может одновременно установить две мгновенные линии разметки полосы движения L1 и L2. См. РИС. 4 и фиг. 7 снова. Если процесс выполняет этап S 64 , это означает, что блок 20 обработки изображения устанавливает только одностороннюю мгновенную линию разметки полосы после этапа S 63 . Здесь в качестве примера используется правая мгновенная линия разметки полосы движения L 1 . Затем процесс переходит к этапу S 641 для установления виртуальной мгновенной линии разметки полосы движения L 2 путем добавления заданной стандартной ширины полосы движения к полученной мгновенной линии разметки полосы движения L 1 . Следовательно, этап S 641 эквивалентен этапу S 65 : установление двух мгновенных линий разметки полосы движения. Если на дороге не нарисована ни одна из линий разметки левой и правой полосы движения, процесс должен перейти к этапу S 66 , чтобы установить по крайней мере одну виртуальную линию разметки полосы движения с помощью процедур обработки изображения, а затем получить точку схода P x линий разметки полосы движения. См. фиг. 8. Во-первых, на этапе S 662 выполняется обнаружение границ для получения нескольких виртуальных характерных точек, при этом виртуальные характерные точки могут быть получены из линейно расположенных объектов перед испытуемым транспортным средством, таких как здания у дороги или транспортные средства перед тестовый автомобиль. После установки мгновенных линий разметки полосы движения L 1 и L 2 их следует обновить с учетом прошедшего времени. Изобретатели уже много лет являются профессионалами в области автомобильных систем освещения и связанных с ними систем управления. На технологию установления модели линий разметки полосы движения (включая точку схода) можно также сослаться на тайваньский патент № 96145498 «Способ и устройство для обнаружения отклонения транспортного средства», являющийся одним из изобретений Изобретателей. См. РИС. 10( a )- 10 ( c ) схемы, схематически показывающие расчет угла наклона и регулировку фар 110 при движении автомобиля в гору или лобовое с неравномерной нагрузкой. См. фиг. 11( a )- 11 ( c ) диаграммы, схематически показывающие расчет угла наклона и регулировку фар 110 при движении автомобиля под уклон или задним ходом при неравномерной нагрузке. На этапе S 10 , смещение и фокусное расстояние камеры 10 используются для расчета уклона наклонной дороги перед транспортным средством. Наклон также равен углу наклона транспортного средства, когда транспортное средство находится на стыке плоскости и наклона. На этапе S101 каждый угол наклона n записывается, где n является порядковым номером действия записи. На этапе S11 вычисляется регулировка угла Δθ. Регулировка фар должна соответствовать правилам высоты и площади фар, чтобы фары не создавали ослепляющего света и не представляли опасности. Постоянно накапливающиеся углы могут привести к неправильной регулировке фар. Таким образом вычисляется разность двух углов наклона, соответственно полученных в двух соседних моментах времени. Другими словами, разница углов равна текущему углу наклона минус предыдущий угол наклона. Регулировка угла Δθ, используемая на этапе S9. На этапе S 12 регулировка угла Δθ преобразуется в управляющий сигнал. На этапе S 13 контроллеры 50 регулировки уровня принимают управляющий сигнал и регулируют фары в соответствии с управляющим сигналом. После этапа S13 процесс снова возвращается к этапу 4 для захвата изображения дороги перед транспортным средством. Процесс не переходит к этапу S9.0022 14 для завершения до тех пор, пока на этапе S 5 не будет определено, что это день, или пока не будет обнаружено ни одной линии разметки полосы движения в течение периода времени на этапе S 6 , или пока пользователь сам не выключит систему. Тот же принцип применим и к случаю, показанному на фиг. 11( a )- 11 ( c ), где транспортное средство движется вниз по склону, и где мгновенная точка схода P x и мгновенная горизонтальная линия H x соответственно обозначены P 2 и Н 2 . В дополнение к регулировке фар способ определения наклона транспортного средства по настоящему изобретению может также применяться для выравнивания системы подвески транспортного средства, балансировки нагрузки транспортного средства и т. д. Во-первых, базовая точка схода и базовая горизонтальная линия устанавливается, когда транспортное средство находится в абсолютно горизонтальной плоскости и загружено равномерно. При изменении количества пассажиров или неравномерной загрузке вычисляются мгновенная точка схода и мгновенная горизонтальная линия. Кроме того, система определения наклона может применяться и к системе электронного стояночного тормоза (EPB). В обычной системе EPB кнопка запуска соединяется с устройством разрешения парковки и тормозным суппортом. В устройстве разрешения парковки используется двигатель, обратный механизм, редуктор и т. д., чтобы тормозной суппорт мог создавать тормозное усилие. Способ определения наклона транспортного средства по настоящему изобретению может определять угол наклона транспортного средства. В соответствии с углом наклона система EPB может определять движущую силу двигателя и управлять его тормозной силой. В заключение, способ определения наклона автомобиля по настоящему изобретению не только отличается высокой точностью, высокой чувствительностью и мгновенностью, но также может прогнозировать состояние дороги.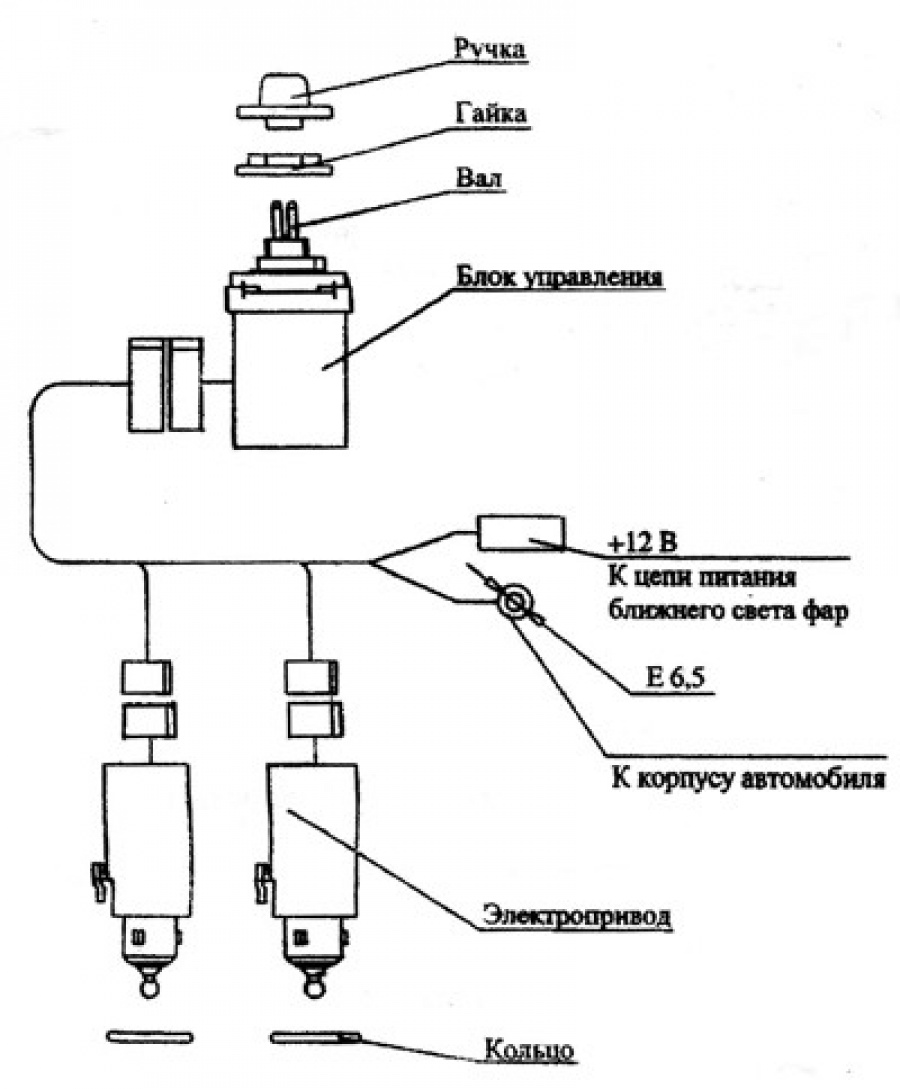
 Однако на многих проселочных дорогах нет разметки полосы движения. В случае, если система не обнаружила характерные точки линии разметки полосы движения, процесс переходит к этапу S9.0022 66 .
Однако на многих проселочных дорогах нет разметки полосы движения. В случае, если система не обнаружила характерные точки линии разметки полосы движения, процесс переходит к этапу S9.0022 66 . Затем процесс переходит к этапу S 7 , чтобы продлить линию L 1 мгновенной разметки полосы движения и виртуальную линию L 2 мгновенной разметки полосы движения для установления мгновенной точки P x исчезновения. Альтернативно, произвольный сегмент линии, параллельный мгновенной линии разметки полосы движения, может быть назначен в качестве виртуальной мгновенной линии разметки полосы движения для получения мгновенной точки P х .
Затем процесс переходит к этапу S 7 , чтобы продлить линию L 1 мгновенной разметки полосы движения и виртуальную линию L 2 мгновенной разметки полосы движения для установления мгновенной точки P x исчезновения. Альтернативно, произвольный сегмент линии, параллельный мгновенной линии разметки полосы движения, может быть назначен в качестве виртуальной мгновенной линии разметки полосы движения для получения мгновенной точки P х . Затем преобразование Хафа используется для анализа характерных точек полосы движения и преобразования характерных точек на этапе S9.0022 663 . Затем на этапе S 664 выполняется обнаружение линии для последовательного соединения соответствующих виртуальных характерных точек для установления по меньшей мере одной виртуальной мгновенной линии разметки полосы движения. Затем мгновенные линии разметки полосы движения могут быть продлены далеко, чтобы сформировать мгновенную точку схода P × на этапе S 7 . В целях безопасности вождения, когда ни одна мгновенная линия разметки полосы движения не устанавливается в течение заданного интервала времени на этапе S 66 , процесс может быть спроектирован таким образом, чтобы непосредственно переходить на этап S9.0022 14 (окончание процесса) с шага S 66 , и фары возвращаются в предустановленные положения.
Затем преобразование Хафа используется для анализа характерных точек полосы движения и преобразования характерных точек на этапе S9.0022 663 . Затем на этапе S 664 выполняется обнаружение линии для последовательного соединения соответствующих виртуальных характерных точек для установления по меньшей мере одной виртуальной мгновенной линии разметки полосы движения. Затем мгновенные линии разметки полосы движения могут быть продлены далеко, чтобы сформировать мгновенную точку схода P × на этапе S 7 . В целях безопасности вождения, когда ни одна мгновенная линия разметки полосы движения не устанавливается в течение заданного интервала времени на этапе S 66 , процесс может быть спроектирован таким образом, чтобы непосредственно переходить на этап S9.0022 14 (окончание процесса) с шага S 66 , и фары возвращаются в предустановленные положения.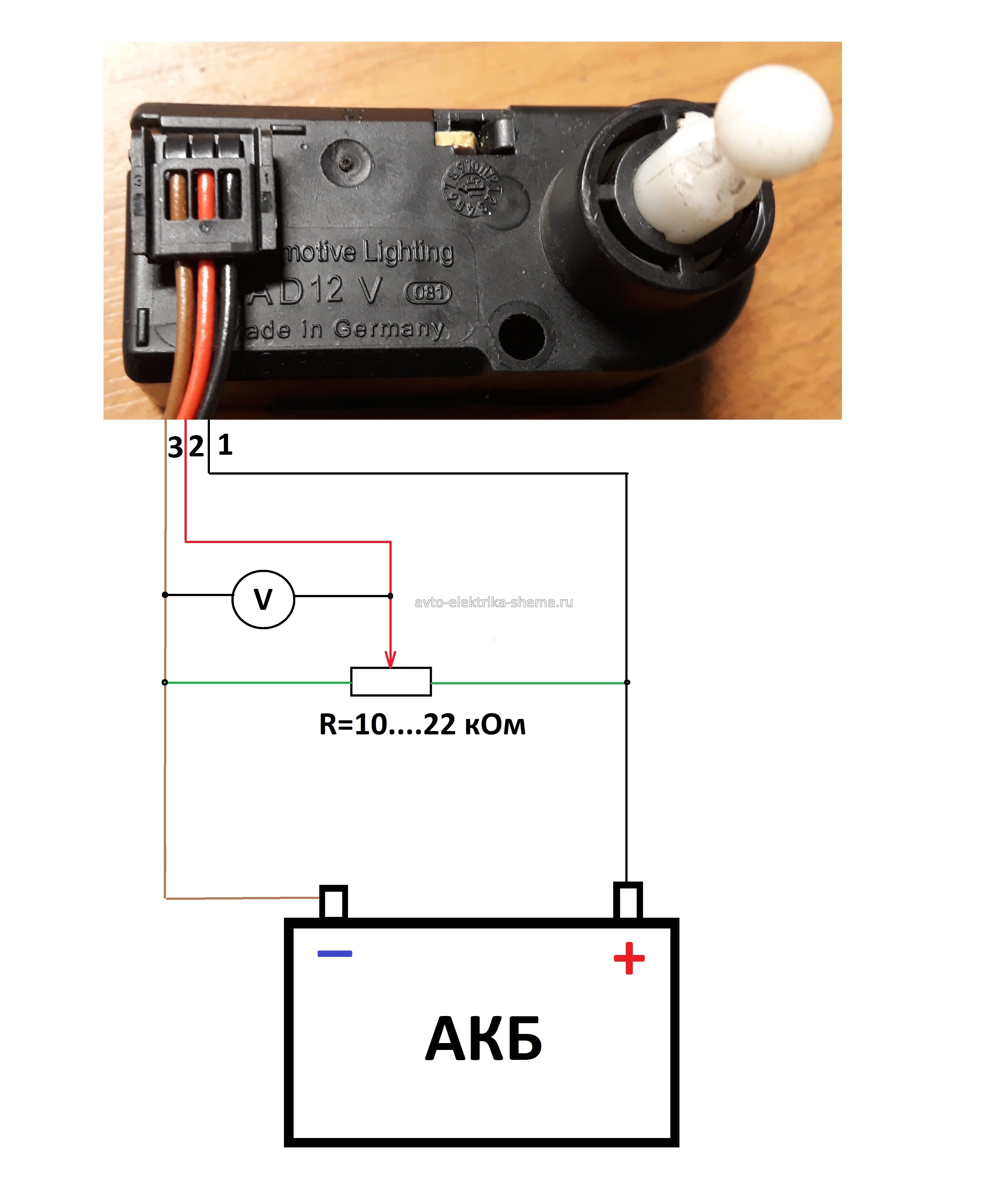 См. фиг. 9 для блок-схемы создания модели предсказания линий разметки полосы движения с постоянно обновляемыми мгновенными линиями разметки полосы движения. Во-первых, на шаге S9 устанавливается модель для прогнозирования линий разметки полосы движения.0022 71 . Затем выполняется поиск начальной точки на этапе S72. Затем модель для прогнозирования линий разметки полосы неоднократно обновляется на этапе S73. Затем мгновенная точка схода P × получается для каждого единичного интервала времени на этапе S 74 . Затем процесс переходит к этапу S8 для установления мгновенной горизонтальной линии H×, проходящей через мгновенную точку схода P×.
См. фиг. 9 для блок-схемы создания модели предсказания линий разметки полосы движения с постоянно обновляемыми мгновенными линиями разметки полосы движения. Во-первых, на шаге S9 устанавливается модель для прогнозирования линий разметки полосы движения.0022 71 . Затем выполняется поиск начальной точки на этапе S72. Затем модель для прогнозирования линий разметки полосы неоднократно обновляется на этапе S73. Затем мгновенная точка схода P × получается для каждого единичного интервала времени на этапе S 74 . Затем процесс переходит к этапу S8 для установления мгновенной горизонтальной линии H×, проходящей через мгновенную точку схода P×. Установление мгновенной точки схода посредством пересечения двух или более линий мгновенной разметки полосы движения является лишь одним из предпочтительных вариантов осуществления настоящего изобретения, и настоящее изобретение не ограничивается этим вариантом осуществления. Единственная мгновенная линия разметки полосы движения и виртуальная мгновенная линия разметки полосы движения, которая представляет собой сегмент линии, параллельный мгновенной линии разметки полосы движения, также могут быть продлены вдаль, образуя точку схода. Точка схода, полученная в любом из двух вариантов осуществления, может быть использована для рисования мгновенной горизонтальной линии.
Установление мгновенной точки схода посредством пересечения двух или более линий мгновенной разметки полосы движения является лишь одним из предпочтительных вариантов осуществления настоящего изобретения, и настоящее изобретение не ограничивается этим вариантом осуществления. Единственная мгновенная линия разметки полосы движения и виртуальная мгновенная линия разметки полосы движения, которая представляет собой сегмент линии, параллельный мгновенной линии разметки полосы движения, также могут быть продлены вдаль, образуя точку схода. Точка схода, полученная в любом из двух вариантов осуществления, может быть использована для рисования мгновенной горизонтальной линии. См. фиг. 10( и ) и ФИГ. 3. Когда перед транспортным средством находится дорога в гору, камера 10 фиксирует изображение дороги на этапе S 4 . Переходом от этапа S 4 к этапу S 8 устанавливаются мгновенная точка схода P x и мгновенная горизонтальная линия H X , которые соответственно обозначены как P 1 и H 1 . на фиг. . 10 ( и ). Затем процесс переходит к этапу S 9 для вычисления смещения между исходной горизонтальной линией H и мгновенной горизонтальной линией H 1 . Базовой горизонтальной линии Н присваивается значение 0; горизонтальная линия над ним имеет положительное значение, а горизонтальная линия под ним имеет отрицательное значение. Смещение определяется как значение базовой горизонтальной линии H минус значение мгновенной горизонтальной линии H 1 (H−H 1 ). Следовательно, смещение отрицательно на фиг.
См. фиг. 10( и ) и ФИГ. 3. Когда перед транспортным средством находится дорога в гору, камера 10 фиксирует изображение дороги на этапе S 4 . Переходом от этапа S 4 к этапу S 8 устанавливаются мгновенная точка схода P x и мгновенная горизонтальная линия H X , которые соответственно обозначены как P 1 и H 1 . на фиг. . 10 ( и ). Затем процесс переходит к этапу S 9 для вычисления смещения между исходной горизонтальной линией H и мгновенной горизонтальной линией H 1 . Базовой горизонтальной линии Н присваивается значение 0; горизонтальная линия над ним имеет положительное значение, а горизонтальная линия под ним имеет отрицательное значение. Смещение определяется как значение базовой горизонтальной линии H минус значение мгновенной горизонтальной линии H 1 (H−H 1 ). Следовательно, смещение отрицательно на фиг. 10 ( a ), что означает, что дорога идет в гору.
10 ( a ), что означает, что дорога идет в гору. 0022 11 вычисляется по уравнению (4):
0022 11 вычисляется по уравнению (4):
Δθ=θ n −θ n-1 (4) В случае спуска мгновенная точка схода P 2 и мгновенная горизонтальная линия H 2 находятся ниже базовой точки схода P и базовой горизонтальной линии H. Следовательно, смещение — значение базовой горизонтальной линии минус значение мгновенной горизонтальной линии – положительное. Когда тот же принцип применяется к случаю, когда транспортное средство задирает хвост из-за неравномерной нагрузки, техническое содержание аналогично и здесь не повторяется.
В случае спуска мгновенная точка схода P 2 и мгновенная горизонтальная линия H 2 находятся ниже базовой точки схода P и базовой горизонтальной линии H. Следовательно, смещение — значение базовой горизонтальной линии минус значение мгновенной горизонтальной линии – положительное. Когда тот же принцип применяется к случаю, когда транспортное средство задирает хвост из-за неравномерной нагрузки, техническое содержание аналогично и здесь не повторяется. Затем базовая горизонтальная линия и мгновенная горизонтальная линия используются для расчета смещения. Далее, шаг S 9 и этап S 10 , описанные выше, используются для получения угла наклона. Затем таким образом регулируют подвесную систему или нагрузку.
Затем базовая горизонтальная линия и мгновенная горизонтальная линия используются для расчета смещения. Далее, шаг S 9 и этап S 10 , описанные выше, используются для получения угла наклона. Затем таким образом регулируют подвесную систему или нагрузку.