
Устройство и принцип работы вариатора
В современном мире ничто не стоит на месте, в том числе и не остается прежней начинка автомобиля. С самого первого дня создания первого автомобиля великие умы бьются над созданием и усовершенствованием каждой детали по отдельности и всего двигателя в целом. Конечно же, каждое усовершенствование идет ради улучшения как технических характеристик авто, так и удобства ради водителя. Сегодня мы рассмотрим относительно новое веяние в автоиндустрии – вариатор.
Вариатор – современная трансмиссия, которую часто называют бесступенчатой. На самом деле является разновидностью автоматической коробки передач, настолько усовершенствованной, что водителю не нужно самостоятельно переключаться.
История возникновения вариатора
Как ни странно, как бы ни казалась идея новаторской и современной, но авторство подобного устройства принадлежит великому изобретателю и гению, Леонардо да Винчи. В современном виде вариатор впервые появился в ХІХ веке. То есть практически наравне с первым автомобилем. Тем не менее, в комплектацию этих самых автомобилей вариатор попал в середине ХХ столетия. Первопроходцем стала компания DAF. Их инженеры ставили вариаторы, как на легковые, так и на грузовые авто. Из этой фирмы идею использования вариатора вместо обычных механических и автоматических коробок передач переняла фирма Audi.
То есть практически наравне с первым автомобилем. Тем не менее, в комплектацию этих самых автомобилей вариатор попал в середине ХХ столетия. Первопроходцем стала компания DAF. Их инженеры ставили вариаторы, как на легковые, так и на грузовые авто. Из этой фирмы идею использования вариатора вместо обычных механических и автоматических коробок передач переняла фирма Audi.
Вариаторы не устанавливаются на грузовые автомобили в связи с сильной нагрузкой на детали. Давление на отдельные детали вариатора при полной мощности работы двигателя легкового автомобиля может достигать 10 тонн.
Конструкция устройства или принцип карандашей
Для того чтобы в полном объеме устроить обзор вариатор, стоит запомнить, что существует три его вида – клиноременной, тороидальный и цепной. Принцип работы каждого одинаков, конструкция разная.
Принцип карандашей или как работает вариатор
Это надо узнать до того, как разбирать конструкцию. Итак, есть два вала – ведущий и ведомый. Первый вал идет от мотора, второй вал идет к колесам. Когда двигатель не работает, передаточный ремень находится в положении, максимально приближенным к ведущему шкиву и максимально отдаленным от ведомого. Шкивы обозначены синими кружочками.
Когда двигатель не работает, передаточный ремень находится в положении, максимально приближенным к ведущему шкиву и максимально отдаленным от ведомого. Шкивы обозначены синими кружочками.
Когда двигатель работает на малых оборотах, картина немного меняется. Ремень отходит от ведущего вала и приближается к ведомому.
Когда двигатель работает на средних оборотах, ремень находится приблизительно на одинаковом расстоянии от валов. Когда двигатель работает на полной мощности, картина полностью противоположна первой. Ремень утоплен в шкив ведомого вала, но полностью вытолкнут от шкива ведущего вала.
Клиноременной вариатор
Особенность, как всегда, заложена в названии. Сверху уже было упоминание о том, что основой вариатора есть валы со шкивами – ведущий и ведомый. А вот соединяет их и передает нужную информацию от одного к другому клиновидный ремень. Так как перед этим ремнем стоят особые задачи и нагрузки на него огромные, состав его особенный. Это смесь резины и ткани, делающая ремень невероятно прочным, намного прочнее того ремня генератора.
Почему ременной, разобрались. Теперь остался вопрос, почему клин. Так вот, форма ремня трапециевидная. Дело в том, что к шкиву он прижимается боками, как бы образуя клин. Несомненно, это место наибольшего трения, ремень изнашивается, истончается и трескается в этих местах. Но это не повод его тут же сменить. Ремень еще больше утопится в шкив и качество сцепки между ним и шкивом не пострадает. Необходимую жесткость обеспечивают стальные пластины, которые покрывают среднюю часть.
Тороидный вариатор
Все то же самое, только без ремня. Его функции выполняют диски. Или ролики, как вариант названия. Есть еще совсем простое название – колеса. Это все сопряжено с внешним видом. Вместо ведущего и ведомого вала в тороидном вариаторе используются диски. У дисков есть две оси вращения – горизонтальная и вертикальная. В зависимости от положения ролика ведущего диска, его отзеркаливает ролик ведомого диска. Примерно этот процесс изображен на картинке ниже.
Недостатки и преимущества вариатора
К вышесказанному о вариаторах стоит прибавить самое главное – в чем их суть и зачем устанавливать их вместо привычных механических коробок передач и автоматических. Весь фокус в приставке «бесступенчатая трансмиссия». Вариатор не требует переключения передач вручную, справляясь с этим самостоятельно, при этом не чувствуется характерных рывков при трогании с места или переключение с первой скорости на вторую. Многим водителям это не нравится, ведь это практически отобранное удовольствие управления. Повинуясь запросам потребителей, современные вариаторы настраиваются таким образом, что двигатель по звуку работает, как и раньше, набирая обороты перед переключением скоростей.
Весь фокус в приставке «бесступенчатая трансмиссия». Вариатор не требует переключения передач вручную, справляясь с этим самостоятельно, при этом не чувствуется характерных рывков при трогании с места или переключение с первой скорости на вторую. Многим водителям это не нравится, ведь это практически отобранное удовольствие управления. Повинуясь запросам потребителей, современные вариаторы настраиваются таким образом, что двигатель по звуку работает, как и раньше, набирая обороты перед переключением скоростей.
Вариатор реагирует на крутящийся момент, поэтому во многих ситуациях спасает автомобиль от лишних перегрузок, особенно если водитель неопытен.
Нужное — Что такое вариатор? Принцип работы вариатора
Вариатор — это бесступенчатая трансмиссия с внешним управлением, которая позволяет автоматически плавно изменять передаточное число, выбирая наиболее оптимальное согласно внешней нагрузке и оборотам двигателя, тем самым давая возможность максимально эффективно использовать его мощность.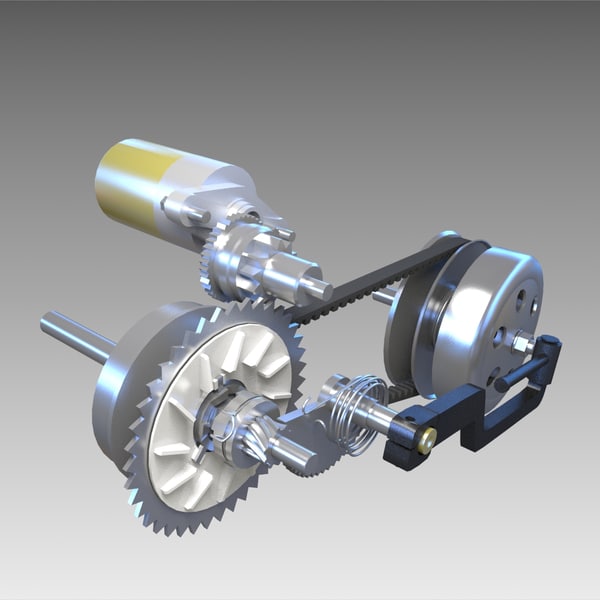 В технике существует множество различных конструкций такого типа, но на автомобиле получили распространение два вида вариаторов: клиноременной и тороидный.
В технике существует множество различных конструкций такого типа, но на автомобиле получили распространение два вида вариаторов: клиноременной и тороидный.
Клиноременный вариатор как тип трансмиссии известен давно. Его главные детали — два раздвижных шкива и соединяющий их ремень, в сечении имеющий трапецеидальную форму. Если половинки ведущего шкива сдвинуть, они вытолкнут ремень, словно попавший между ними клин (отсюда и название «клиноременный»), наружу — радиус шкива, по которому работает ремень увеличится, следовательно, увеличится и передаточное отношение. А если половинки ведомого шкива, наоборот, раздвинуть, то ремень провалится внутрь и будет работать по меньшему радиусу — передаточное отношение уменьшится. Если оба шкива будут в промежуточном положении, то передача станет прямой.
Устройство и принцип работы вариатора
Клиноременной вариатор состоит из нескольких (как правило, одной- двух) ременных передач, где шкивы образованы коническими дисками, за счет сдвигания и раздвигания которых изменяются диаметр шкивов и, соответственно, передаточное число. Разные фирмы разработали каждая свою конструкцию клиноременного вариатора, так на Audi в трансмиссии Multitronic вместо ремня применяют цепь, а Honda ставит набранный из металлических пластин ремень, но принцип от этого не меняется.
Разные фирмы разработали каждая свою конструкцию клиноременного вариатора, так на Audi в трансмиссии Multitronic вместо ремня применяют цепь, а Honda ставит набранный из металлических пластин ремень, но принцип от этого не меняется.
Для трогания автомобиля с места используются обычное сцепление или небольшой гидротрансформатор, который вскоре после начала движения блокируется. Управление дисками шкивов осуществляет электронная система из сервоприводов, блока управления и датчиков.
Начнем с самого простого. Почему клиновидный ремень? Ремень в разрезе имеет трапециевидную форму и «вклинивается» в шкив только своими боковыми поверхностями. При износе этих поверхностей, благодаря своей форме, он врезается глубже в шкив и все равно остается в хорошей сцепке с ним. Как изменяется передаточное число? Устройство ведущего шкива (ведущий шкив вращается коленвалом) таково, что его щеки при воздействии центробежных сил плавно сжимаются и выталкивают клиновидный ремень все дальше и дальше от центра шкива. Ведомый же шкив при этом наоборот, разжимается, и ремень на нем плавно утопает все ближе и ближе к центру шкива. Чем больше обороты двигателя — тем больше сжимается ведущий шкив и разжимается ведомый, тем самым меняя передаточное число от коленвала к заднему колесу. Этот процесс хорошо виден на рисунках,прикрепленных к посту.
Ведомый же шкив при этом наоборот, разжимается, и ремень на нем плавно утопает все ближе и ближе к центру шкива. Чем больше обороты двигателя — тем больше сжимается ведущий шкив и разжимается ведомый, тем самым меняя передаточное число от коленвала к заднему колесу. Этот процесс хорошо виден на рисунках,прикрепленных к посту.
Иначе устроен тороидный вариатор, который состоит из соосных дисков и роликов, передающих момент от одного диска к другому. Для изменения передаточного числа меняются положение роликов и их радиусы, по которым ролики обкатывают диски. И поскольку все усилие сосредоточено в пятне контакта, то для поворота роликов должны использоваться особые устройства, способные преодолевать силу прижатия ролика к диску. Так в ниссановском вариаторе Extroid применена специальная система, где управляемый электроникой прецизионный гидравлический механизм перемещает обоймы с роликами вверх или вниз на микроскопическую величину, а далее, из-за возникшего сдвига относительно оси дисков, ролик поворачивается сам.
Между прочим, принцип устройства под названием “вариатор” не нов — мысли о бесступенчатой трансмиссии стали посещать конструкторов практически сразу с началом применения поршневых ДВС на транспорте. Современное же развитие электроники и технологии материалов дало возможности усовершенствовать (остающиеся, однако, в принципе своем неизменными) конструкции вариаторов, и сейчас наблюдается, по-видимому, начало самого широкого распространения таких трансмиссий на автотранспорте.
Тем не менее вариаторы пока что не избавились от некоторых своих весьма существенных проблем. Так, очевидно, что самыми конструктивно слабыми местами существующих сегодня автомобильных вариаторов являются: для клиноременного эти самые ремни, а для тороидного — пятно контакта диска и ролика, где сила давления достигает 10 тонн. Поэтому здесь применяются специальные высокотехнологичные материалы, что делает надежность вариаторов достаточно высокой, близкой к надежности гидромеханических “автоматов”, но все же из-за нагрузок на ремень или пятно контакта вариаторы пока не могут “тянуть грузы”, а также работать с двигателями большой мощности.
На сегодняшний день рекордом для клиноременного вариатора оказывается 220 л.с. и 300 Нм, которые развивает V-образный 6-цилиндровый мотор Audi A6, “воспринятый” трансмиссией Multitronic, а для тороидного — “переваренный” Extroid (3-литровый двигатель Nissan Gloria и Cedric), развивающий 240 л.с. и 310 Нм.
Однако если для грузовиков вариаторы до сих пор непригодны, то для легковых автомобилей весьма приемлемы, и здесь у бесступенчатых трансмиссий, очевидно, большое будущее, тем более что и технологии материалов не стоят на месте.
Если сравнить динамические характеристики многих автомобилей, оснащаемых вариатором, может возникнуть недоумение — почему на одной и той же модели автомобиля разгон с вариатором происходит медленнее, чем с механической коробкой, ибо должно быть наоборот, раз вариатор лучше использует мощность двигателя? Все дело в привычке — многие клиенты были очень недовольны, что машина с вариатором “все время ноет на одной ноте”. Большинство же водителей привыкли к знакомому нарастающему шуму мотора, и многие фирмы идут клиентам навстречу, специально настраивая электронный блок управления трансмиссией. На самом же деле при нормальной настройке блока разгон, конечно, происходит быстрее.
На самом же деле при нормальной настройке блока разгон, конечно, происходит быстрее.
В заключение отметим, что вариаторы является куда более совершенным типом трансмиссии по сравнению с традиционными автоматическими коробками передач. Совершенство проявляется в более лучшей динамике разгона, меньшем расходе топлива, более плавной езде у автомобилей оснащённых клиноременными вариаторами. И в тоже время, вариаторы проще по конструкции, чем традиционные «автоматы». Думается, что в недалёком будущем автомобили оснащённые вариаторами полностью вытеснят машины, оснащённые обычными «автоматами» и сильно потеснят машины с «механикой».
Заявка на патент США для бесступенчатой трансмиссии с шариковым вариатором Заявка на патент (заявка № 201
756, выданная 31 января 2019 г.) 31, 2017, который включен в настоящий документ посредством ссылки.
ИСХОДНАЯ ИНФОРМАЦИЯ
Трансмиссия, включающая бесступенчатую трансмиссию, позволяет оператору или системе управления бесступенчато изменять передаточное отношение, позволяя источнику энергии работать с наиболее предпочтительной скоростью вращения.
РЕЗЮМЕ
В данном документе предложен узел вариатора, включающий: первый вращающийся вал, функционально присоединяемый к источнику вращательной мощности; и вариатор, имеющий первый узел тягового кольца и второй узел тягового кольца, контактирующие с множеством шариков, при этом каждый шарик из множества шариков имеет наклоняемую ось вращения, при этом вариатор соосен с первым вращающимся валом, и при этом первый вращающийся вал функционально соединен с солнечным узлом, причем солнечный узел расположен радиально внутри и в контакте с множеством шариков.
ВКЛЮЧЕНИЕ ПУТЕМ ССЫЛКИ
Все публикации, патенты и патентные заявки, упомянутые в этом описании, включены в настоящее описание посредством ссылки в той же степени, как если бы каждая отдельная публикация, патент или патентная заявка были специально и отдельно указаны для включения ссылка.
Новые особенности предпочтительных вариантов осуществления подробно изложены в прилагаемой формуле изобретения. Лучшее понимание особенностей и преимуществ настоящих вариантов осуществления будет получено путем обращения к следующему подробному описанию, в котором представлены иллюстративные варианты осуществления, в которых используются принципы предпочтительных вариантов осуществления, и сопровождающие чертежи которых:
РИС. 1 — вид сбоку в разрезе шарового вариатора.
РИС. 2 представляет собой вид сверху несущего элемента, который используется в вариаторе, показанном на фиг. 1.
РИС. 3 представляет собой иллюстративный вид различных положений наклона шарового вариатора, показанного на фиг. 1.
РИС. 4 представляет собой схематическую иллюстрацию вариатора с разъемным натяжным роликом в сборе.
РИС. 5 представляет собой схематическое изображение вариатора с одним натяжным элементом.
РИС. 6 представляет собой схематическое изображение вариатора с разъемным главным валом.
РИС. 7 представляет собой схематическое изображение другого вариатора с разъемным главным валом.
РИС. 8 представляет собой схематическое изображение еще одного вариатора с разъемным главным валом.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Далее будут описаны предпочтительные воплощения со ссылками на прилагаемые чертежи, на которых одинаковые номера обозначают одинаковые элементы. Терминология, используемая в приведенных ниже описаниях, не должна интерпретироваться каким-либо ограничивающим или ограничительным образом просто потому, что она используется в сочетании с подробными описаниями некоторых конкретных вариантов осуществления. Кроме того, предпочтительные варианты осуществления включают в себя несколько новых признаков, ни один из которых не отвечает исключительно за желаемые свойства или является существенным для применения на практике описанных вариантов осуществления.
В данном документе представлены конфигурации вариаторов на базе шаровых вариаторов, также известных как CVP, для бесступенчатых планетарных передач. Основные принципы бесступенчатой трансмиссии шарового типа описаны в патенте США No. №№ 8,469,856 и 8,870,711, включенные сюда посредством ссылки во всей своей полноте. Такой вариатор, адаптированный в соответствии с описанным в данном описании, включает в себя ряд шариков (планет, сфер) 1 , в зависимости от применения, два кольцевых (дисковых) узла с конической поверхностью, контактирующей с шариками, вход ( первое) тяговое кольцо 2 , выходное (второе) тяговое кольцо 3 и узел холостого хода (солнце) 4 , как показано на ФИГ. 1. Шары установлены на наклоняемых осях 5 , которые сами удерживаются в узле несущего элемента (статора, клетки), имеющего первый элемент несущего элемента 6 , функционально соединенный со вторым элементом несущего элемента 7 .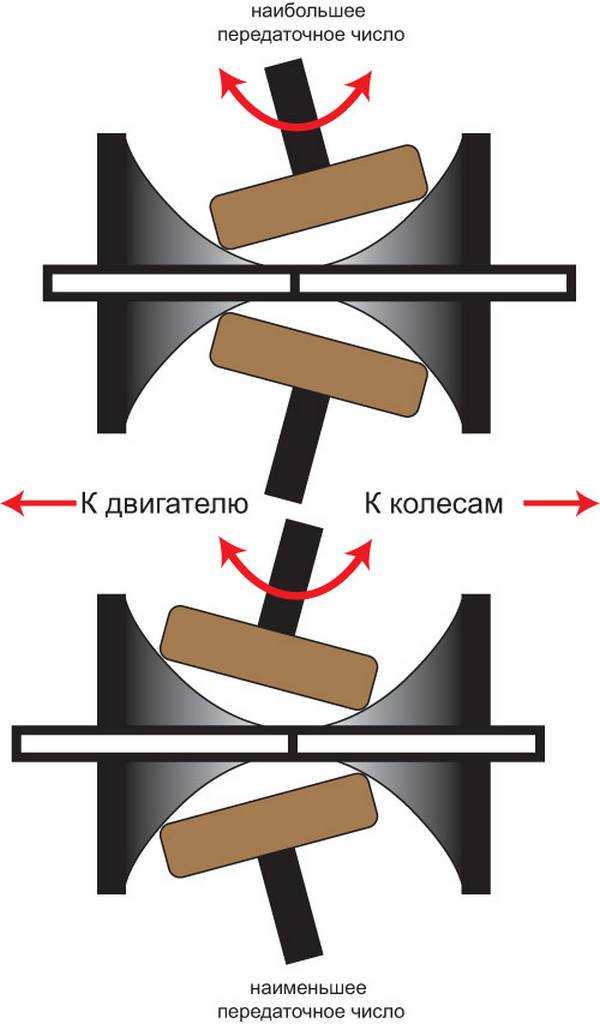 Первый несущий элемент 6 вращается относительно второго несущего элемента 7 и наоборот. В некоторых вариантах осуществления первый несущий элемент 6 фиксируется от вращения, в то время как второй несущий элемент 7 выполнен с возможностью вращения относительно первого несущего элемента, и наоборот. В одном варианте осуществления первый несущий элемент 6 снабжен рядом радиальных направляющих пазов 8 . Второй несущий элемент 7 снабжен рядом смещенных в радиальном направлении направляющих пазов 9 , как показано на фиг. 2. Радиальные направляющие пазы 8 и радиально смещенные направляющие пазы 9 предназначены для направляющих поворотных осей 5 . Оси 5 регулируются для достижения желаемого соотношения входной скорости к выходной скорости при работе вариатора. В некоторых вариантах осуществления регулировка осей 5 включает управление положением первого и второго несущих элементов для обеспечения наклона осей 5 и, таким образом, регулировки передаточного числа вариатора.
Первый несущий элемент 6 вращается относительно второго несущего элемента 7 и наоборот. В некоторых вариантах осуществления первый несущий элемент 6 фиксируется от вращения, в то время как второй несущий элемент 7 выполнен с возможностью вращения относительно первого несущего элемента, и наоборот. В одном варианте осуществления первый несущий элемент 6 снабжен рядом радиальных направляющих пазов 8 . Второй несущий элемент 7 снабжен рядом смещенных в радиальном направлении направляющих пазов 9 , как показано на фиг. 2. Радиальные направляющие пазы 8 и радиально смещенные направляющие пазы 9 предназначены для направляющих поворотных осей 5 . Оси 5 регулируются для достижения желаемого соотношения входной скорости к выходной скорости при работе вариатора. В некоторых вариантах осуществления регулировка осей 5 включает управление положением первого и второго несущих элементов для обеспечения наклона осей 5 и, таким образом, регулировки передаточного числа вариатора. Существуют и другие типы шаровых вариаторов, но они немного отличаются.
Существуют и другие типы шаровых вариаторов, но они немного отличаются.
Принцип работы такого CVP на фиг. 1 показан на фиг. 3. Сам ЦВД работает на тяговой жидкости. Смазка между шариком и коническими кольцами действует как твердое вещество при высоком давлении, передавая мощность от входного кольца через шарики к выходному кольцу. Наклоняя оси шаров, соотношение между входом и выходом изменяется. Когда ось горизонтальна, отношение равно единице, как показано на фиг. 3, когда ось наклонена, расстояние между осью и точкой контакта изменяется, изменяя общее соотношение. Все оси шаров наклоняются одновременно с помощью механизма, входящего в состав водила и/или натяжителя. Раскрытые здесь варианты осуществления относятся к управлению вариатором и/или вариатором с использованием, как правило, сферических сателлитов, каждая из которых имеет наклоняемую ось вращения, которые регулируются для достижения желаемого отношения входной скорости к выходной скорости во время работы. В некоторых вариантах осуществления регулировка упомянутой оси вращения включает угловое смещение оси сателлита в первой плоскости для достижения угловой регулировки оси сателлита во второй плоскости, которая по существу перпендикулярна первой плоскости, тем самым регулируя передаточное число. вариатора. Угловое смещение в первой плоскости упоминается здесь как «перекос», «угол перекоса» и/или «состояние перекоса». В одном варианте осуществления система управления координирует использование угла наклона для создания сил между некоторыми контактирующими компонентами в вариаторе, которые будут наклонять ось вращения планетарной передачи. Наклон оси вращения планеты регулирует передаточное число вариатора.
В некоторых вариантах осуществления регулировка упомянутой оси вращения включает угловое смещение оси сателлита в первой плоскости для достижения угловой регулировки оси сателлита во второй плоскости, которая по существу перпендикулярна первой плоскости, тем самым регулируя передаточное число. вариатора. Угловое смещение в первой плоскости упоминается здесь как «перекос», «угол перекоса» и/или «состояние перекоса». В одном варианте осуществления система управления координирует использование угла наклона для создания сил между некоторыми контактирующими компонентами в вариаторе, которые будут наклонять ось вращения планетарной передачи. Наклон оси вращения планеты регулирует передаточное число вариатора.
В целях описания термин «радиальный» используется здесь для обозначения направления или положения, которое является перпендикулярным относительно продольной оси трансмиссии или вариатора. Используемый здесь термин «аксиальный» относится к направлению или положению вдоль оси, которая параллельна главной или продольной оси трансмиссии или вариатора. Для ясности и краткости, иногда аналогичные компоненты, обозначенные одинаково (например, подшипник 1011 A и подшипник 1011 B), будут обозначаться вместе одной маркировкой (например, подшипник 9).0003 1011 ).
Для ясности и краткости, иногда аналогичные компоненты, обозначенные одинаково (например, подшипник 1011 A и подшипник 1011 B), будут обозначаться вместе одной маркировкой (например, подшипник 9).0003 1011 ).
Используемые здесь термины «функционально соединенный», «функционально соединенный», «функционально связанный», «функционально соединенный», «функционально соединенный», «функционально связанный», «функционально соединяемый» и подобные термины относятся к взаимосвязи (механическое, рычажное, соединение и т. д.) между элементами, при котором действие одного элемента приводит к соответствующему, последующему или одновременному действию или приведению в действие второго элемента. Следует отметить, что при использовании указанных терминов для описания вариантов осуществления изобретения обычно описываются конкретные структуры или механизмы, которые связывают или соединяют элементы. Однако, если специально не указано иное, когда используется один из указанных терминов, этот термин указывает на то, что фактическая связь или соединение принимают различные формы, которые в некоторых случаях будут очевидны для специалиста с обычными навыками в соответствующей технологии.
Следует отметить, что ссылка здесь на «тяговое усилие» не исключает приложений, в которых доминирующим или исключительным способом передачи мощности является «трение». Не пытаясь здесь установить категорическое различие между тяговой и фрикционной передачей, обычно под ними обычно понимают разные режимы передачи мощности. Тяговые приводы обычно связаны с передачей мощности между двумя элементами за счет сил сдвига в тонком слое жидкости, заключенном между элементами. Жидкости, используемые в этих приложениях, обычно имеют более высокие коэффициенты сцепления, чем обычные минеральные масла. Коэффициент тяги (μ) представляет собой максимально доступное тяговое усилие, которое было бы доступно на границах раздела контактирующих компонентов, и представляет собой отношение максимально доступного крутящего момента привода к контактному усилию. Как правило, фрикционные приводы связаны с передачей мощности между двумя элементами за счет сил трения между элементами. Для целей настоящего раскрытия следует понимать, что описанные здесь вариаторы работают как в тяговых, так и в фрикционных приложениях. Например, в варианте осуществления, где вариатор используется для велосипеда, вариатор иногда работает как фрикционный привод, а иногда как тяговый привод, в зависимости от условий крутящего момента и скорости, присутствующих во время работы.
Например, в варианте осуществления, где вариатор используется для велосипеда, вариатор иногда работает как фрикционный привод, а иногда как тяговый привод, в зависимости от условий крутящего момента и скорости, присутствующих во время работы.
Обратимся теперь к фиг. 4, в некоторых вариантах осуществления вариатор 100 подобен вариатору, изображенному на ФИГ. 1-3. В целях описания только различия между вариатором , 100, и вариатором на фиг. 1-3 будут описаны. Вариатор 100 содержит несколько шариков 101 , находящихся в контакте с первым узлом 102 тягового кольца и вторым узлом 104 тягового кольца.
В некоторых вариантах осуществления первый узел тягового кольца 102 соединен с подшипником 103 .
В некоторых вариантах осуществления подшипник 103 представляет собой генератор осевой силы, такой как шарико-кулачковая рампа, которая создает осевую силу, зависящую от крутящего момента. Второй узел тягового кольца 104 соединен с подшипником 105 . В некоторых вариантах осуществления подшипник , 105, представляет собой генератор осевой силы. Шарики 101 , первый узел тягового кольца 102 и второй узел тягового кольца 104 соосны с вращающимся главным валом 106 . Главный вал 106 соединен с узлом натяжителя, таким как узел натяжителя 4 , имеющим первый натяжитель 107 и второй натяжитель 108 .
Второй узел тягового кольца 104 соединен с подшипником 105 . В некоторых вариантах осуществления подшипник , 105, представляет собой генератор осевой силы. Шарики 101 , первый узел тягового кольца 102 и второй узел тягового кольца 104 соосны с вращающимся главным валом 106 . Главный вал 106 соединен с узлом натяжителя, таким как узел натяжителя 4 , имеющим первый натяжитель 107 и второй натяжитель 108 .
В некоторых вариантах осуществления первый натяжной ролик 107 содержит подшипник, такой как радиально-упорный подшипник, для облегчения соединения между основным валом 106 и шариками 101 .
В некоторых вариантах основной вал 106 предназначен для приема или передачи мощности вращения. Во время работы CVP 100 мощность вращения дополнительно передается на CVP 100 через главный вал 106 , первый узел тягового кольца 102 или второй узел тягового кольца 104 . Следует понимать, что указанные компоненты необязательно приспособлены для передачи мощности из CVP 100 .
Во время работы CVP 100 мощность вращения дополнительно передается на CVP 100 через главный вал 106 , первый узел тягового кольца 102 или второй узел тягового кольца 104 . Следует понимать, что указанные компоненты необязательно приспособлены для передачи мощности из CVP 100 .
Обратимся теперь к фиг. 5, в некоторых вариантах вариатор 200 подобен вариатору, изображенному на РИС. 1-3. В целях описания только различия между вариатором , 200, и вариатором на фиг. 1-3 будут описаны. Вариатор 200 содержит несколько шариков 201 , находящихся в контакте с первым узлом 202 тягового кольца и вторым узлом 204 тягового кольца.
В некоторых вариантах осуществления первый узел упорного кольца 202 соединен с подшипником 203 .
В некоторых вариантах осуществления подшипник 203 представляет собой генератор осевой силы, такой как шарико-кулачковая рампа, которая создает осевую силу, зависящую от крутящего момента. Второй узел тягового кольца 204 соединен с подшипником 205 .
В некоторых вариантах осуществления подшипник 205 представляет собой генератор осевой силы. Шарики 201 , первый узел тягового кольца 202 и второй узел тягового кольца 204 соосны с вращающимся главным валом 206 . Главный вал 206 соединен с промежуточным узлом 207 .
В некоторых вариантах осуществления главный вал 206 предназначен для приема или передачи мощности вращения. Во время работы CVP 200 мощность вращения передается на CVP 200 через главный вал 206 , первый узел тягового кольца 202 или второй узел 9 тягового кольца. 0003 204 . Следует понимать, что указанные компоненты необязательно приспособлены для передачи мощности из CVP 200 .
0003 204 . Следует понимать, что указанные компоненты необязательно приспособлены для передачи мощности из CVP 200 .
На фиг. 6, в некоторых вариантах осуществления вариатор 300 подобен вариатору, изображенному на ФИГ. 1-3. В целях описания только различия между вариатором , 300, и вариатором на фиг. 1-3 будут описаны. Вариатор 300 содержит несколько шариков 301 , контактирующих с первым узлом тягового кольца 9.0003 302 и второе сцепление в сборе 304 .
В некоторых вариантах осуществления первый узел тягового кольца 302 соединен с подшипником 303 .
В некоторых вариантах осуществления подшипник 303 представляет собой генератор осевой силы, такой как шарико-кулачковая рампа, которая создает осевую силу, зависящую от крутящего момента. Второй узел тягового кольца 304 соединен с подшипником 305 .
В некоторых вариантах подшипник 305 — генератор осевой силы. Шарики 301 , первый узел 302 тягового кольца и второй узел 304 тягового кольца соосны с вращающимся главным валом 306 . Главный вал 306 соединен с промежуточным узлом 307 .
В некоторых вариантах осуществления главный вал 306 предназначен для приема или передачи мощности вращения.
В некоторых вариантах реализации CVP 300 включает выходной вал 309 , расположенный соосно с главным валом 306 и соединенный в осевом направлении с подшипником 308 . При работе CVP 300 мощность вращения передается на CVP 300 через главный вал 306 , выходной вал 308 , первый узел тягового кольца 302 или второй узел тягового кольца. 304 . Следует понимать, что указанные компоненты дополнительно приспособлены для передачи мощности из CVP 9.0003 300 .
304 . Следует понимать, что указанные компоненты дополнительно приспособлены для передачи мощности из CVP 9.0003 300 .
На фиг. 7, в некоторых вариантах осуществления вариатор , 400, подобен вариатору, изображенному на ФИГ. 1-3. В целях описания только различия между вариатором , 400, и вариатором на фиг. 1-3 будут описаны. Вариатор 400 содержит ряд шариков 401 , находящихся в контакте с первым узлом 402 тягового кольца и вторым узлом 404 тягового кольца.
В некоторых вариантах осуществления первый узел тягового кольца 402 соединен с подшипником 403 .
В некоторых вариантах осуществления подшипник 403 представляет собой генератор осевой силы, такой как шарико-кулачковый наклонный механизм, который создает осевую силу, зависящую от крутящего момента. Второй узел тягового кольца 404 соединен с подшипником 405 . В некоторых вариантах осуществления подшипник , 405, представляет собой генератор осевой силы. Шарики 401 , первый узел тягового кольца 402 и второй узел тягового кольца 404 соосны с вращающимся главным валом 406 . Главный вал 406 соединен с первым промежуточным кольцом 407 , находящимся в контакте с шариками 401 .
Второй узел тягового кольца 404 соединен с подшипником 405 . В некоторых вариантах осуществления подшипник , 405, представляет собой генератор осевой силы. Шарики 401 , первый узел тягового кольца 402 и второй узел тягового кольца 404 соосны с вращающимся главным валом 406 . Главный вал 406 соединен с первым промежуточным кольцом 407 , находящимся в контакте с шариками 401 .
В некоторых вариантах осуществления главный вал 406 предназначен для приема или передачи мощности вращения.
В некоторых вариантах реализации CVP 400 включает выходной вал 409 , расположенный соосно с основным валом 406 . Выходной вал 409 функционально соединен со вторым направляющим кольцом 408 , находящимся в контакте с шариками 401 . Во время работы CVP 400 мощность вращения передается на CVP 400 через главный вал 406 , второе направляющее кольцо 408 , первый узел тягового кольца 402 или второе тяговое кольцо. сборка 404 . Следует понимать, что указанные компоненты дополнительно приспособлены для передачи мощности из CVP 9.0003 400 .
Во время работы CVP 400 мощность вращения передается на CVP 400 через главный вал 406 , второе направляющее кольцо 408 , первый узел тягового кольца 402 или второе тяговое кольцо. сборка 404 . Следует понимать, что указанные компоненты дополнительно приспособлены для передачи мощности из CVP 9.0003 400 .
На фиг. 8, в некоторых вариантах осуществления вариатор , 500, подобен вариатору, изображенному на ФИГ. 1-3. В целях описания только различия между вариатором , 500, и вариатором на фиг. 1-3 будут описаны. Вариатор 500 содержит несколько шариков 501 , находящихся в контакте с первым узлом 502 тягового кольца и вторым узлом 504 тягового кольца.
В некоторых вариантах осуществления первый узел тягового кольца 502 соединен с подшипником 503 .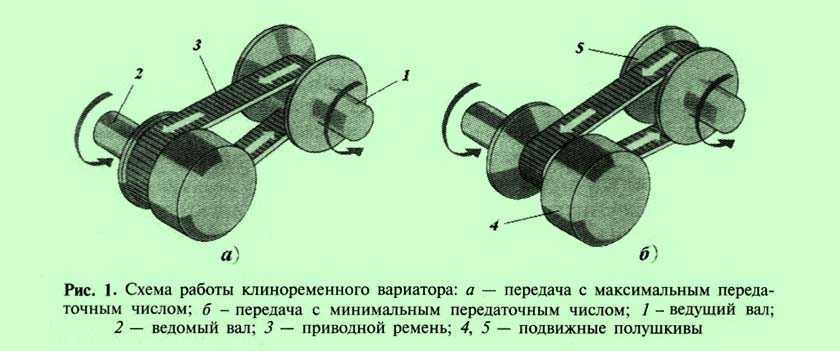
В некоторых вариантах осуществления подшипник 503 представляет собой генератор осевой силы, такой как шарико-кулачковая рампа, которая создает осевую силу, зависящую от крутящего момента. Второй узел тягового кольца 504 соединен с подшипником 505 .
В некоторых вариантах осуществления подшипник 505 представляет собой генератор осевой силы. Шарики 501 , первое упорное кольцо в сборе 502 , а второй узел тягового кольца 504 соосен с вращающимся главным валом 506 . Главный вал 506 соединен с первым промежуточным кольцом 507 , соединенным подшипником, таким как радиально-упорный подшипник, с шариками 501 .
В некоторых вариантах осуществления главный вал 506 предназначен для приема или передачи мощности вращения.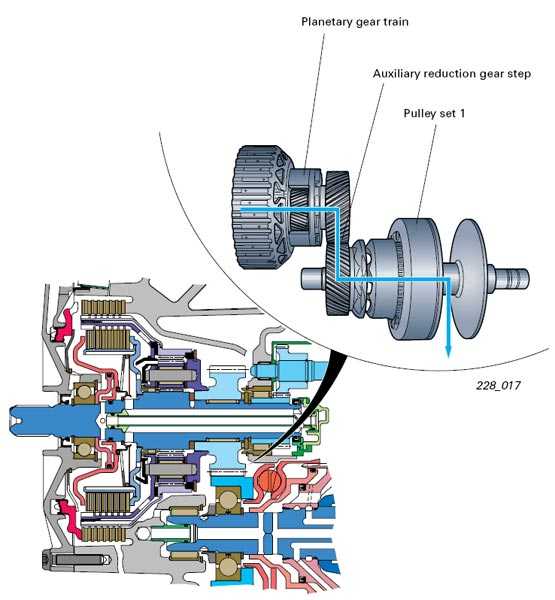
В некоторых вариантах CVP 500 включает выходной вал 509 расположен соосно с главным валом 506 . Выходной вал 509 функционально соединен со вторым промежуточным кольцом 508 , соединенным подшипником, таким как радиально-упорный подшипник, с шариками 501 . При работе ЦВП 500 мощность вращения дополнительно передается на ЦВП 500 через главный вал 506 , второе направляющее кольцо 508 , первое упорное кольцо в сборе 502 или второй узел тягового кольца 504 . Следует понимать, что указанные компоненты необязательно приспособлены для передачи мощности из CVP 500 .
Хотя здесь были показаны и описаны предпочтительные варианты осуществления, специалистам в данной области техники будет очевидно, что такие варианты осуществления приведены только в качестве примера.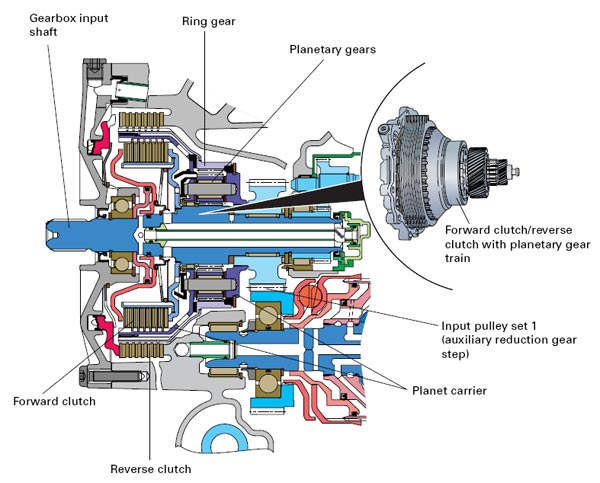 Специалистам в данной области техники будут очевидны многочисленные вариации, изменения и замены, не отступающие от предпочтительных вариантов осуществления. Следует понимать, что на практике могут использоваться различные альтернативы описанным здесь вариантам осуществления. Предполагается, что следующая формула изобретения определяет объем предпочтительных вариантов осуществления и что способы и конструкции в объеме этой формулы изобретения и их эквиваленты охватываются ими.
Специалистам в данной области техники будут очевидны многочисленные вариации, изменения и замены, не отступающие от предпочтительных вариантов осуществления. Следует понимать, что на практике могут использоваться различные альтернативы описанным здесь вариантам осуществления. Предполагается, что следующая формула изобретения определяет объем предпочтительных вариантов осуществления и что способы и конструкции в объеме этой формулы изобретения и их эквиваленты охватываются ими.
Методы управления скоростью различных типов двигателей с регулированием скорости
Скачать PDF
Kazuya SHIRAHATA
Компания Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулированием скорости. Наши блоки управления скоростью включают в себя двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
В нашем окружении для общих целей используется большое количество двигателей, от бытовой техники до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Функции и характеристики, необходимые для этих двигателей, очень разнообразны. Если сосредоточить внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели регулируют свою скорость с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и/или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и характеристики следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Двигатель переменного тока с регулятором скорости и мотор-редукторы
- Бесщеточный двигатель постоянного тока и мотор-редукторы
- Блок инвертора
2. Методы управления скоростью различных двигателей с регулированием скорости
Способ управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис. 1 Классификация двигателей с регулируемой скоростью
2.1. Двигатели переменного тока с регулируемой скоростью
2.1.1. Конструкция двигателя
Как показано на рис. 2, конструкция однофазных и трехфазных асинхронных двигателей включает в себя статор, на который намотана первичная обмотка, и литой из цельного алюминия ротор в форме корзины. Ротор недорогой, потому что конструкция проста и не использует магнит.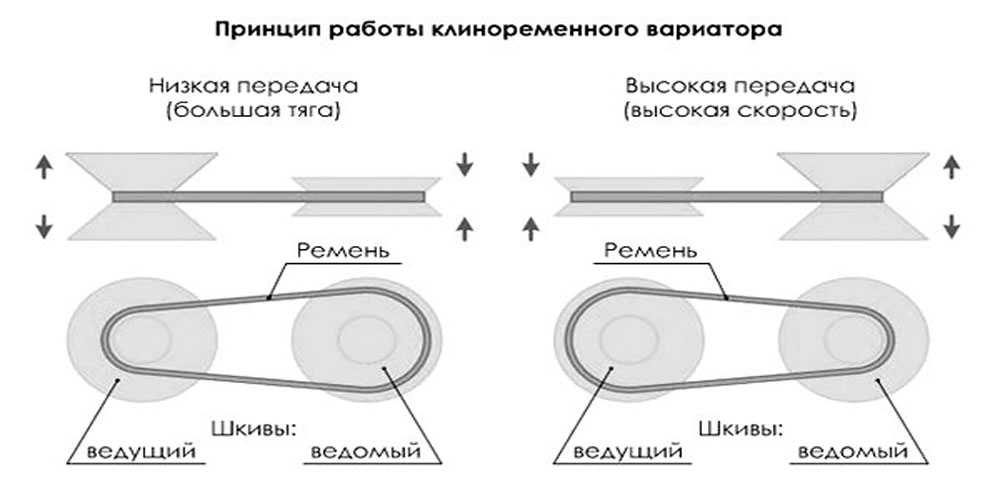
Рис. 2 Конструкция асинхронного двигателя
Когда необходимо контролировать скорость этого двигателя, для определения скорости используется тахогенератор, который крепится к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к вал двигателя и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис. 3 Система управления двигателем переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя можно выразить выражением (1). Когда напряжение, подаваемое на двигатель, увеличивается и уменьшается, скольжение с изменяется, а затем изменяется скорость вращения N.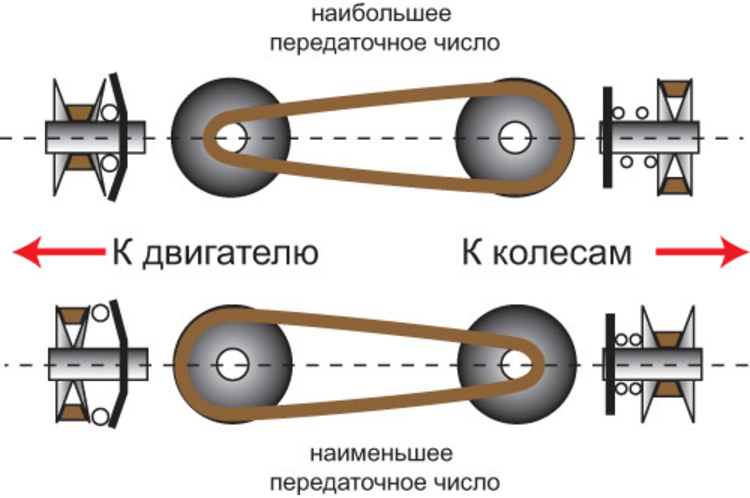
N = 120· f ·(1- s )/ P · · · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P
S : Скольжение
В случае асинхронного двигателя, как показано на рис. 4, существует стабильный и нестабильный диапазоны на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы обеспечить надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Скорость вращения – характеристики крутящего момента асинхронных двигателей
Рис. 5 Простое управление напряжением
5 Простое управление напряжением
Доступные методы управления напряжением включают управление с помощью трансформатора или фазового управления. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения/выключения каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
Рис. 6 Изменение напряжения с помощью трансформатора
Рис. 7 Изменение напряжения с помощью фазового контроля
. управление фазой с обратной связью даже в нестабильном диапазоне.
управление фазой с обратной связью даже в нестабильном диапазоне.
На рис. 9 в виде блок-схемы показана конфигурация системы управления скоростью для двигателя переменного тока с регулированием скорости.
Рис. 9 Блок-схема системы управления двигателем переменного тока
Рис. 10 Форма волны для каждого блока
На рис. 10 показаны формы волны для каждого блока. Заданное значение скорости d и обнаруженное напряжение e скорости, генерируемой тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения a .
Сигнал напряжения a низкий, когда обнаруженное значение скорости достигает заданного значения скорости, и выше, когда заданное значение скорости снижается. Поскольку триггерный сигнал выводится в точке, где треугольная волна b пересекается с сигналом напряжения a , определяется время (фазовый угол) включения симистора с уровнем сигнала напряжения a .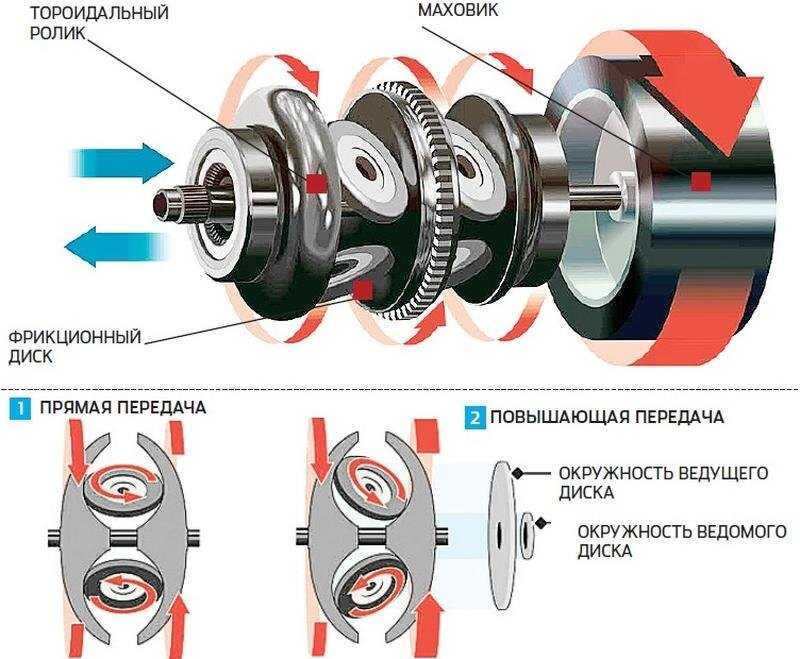 Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид вышеупомянутого регулятора скорости. На рис. 11 рабочая точка двигателя рисует петлю Q-R-S-T-Q с центром в точке O, а скорость вращения поддерживается между N1 и N2. Эта петля максимально уменьшена за счет повышения точности определения скорости.
Рис. 11 Работа регулятора скорости
Электродвигатель регулятора скорости переменного тока имеет следующие особенности при использовании фазового регулирования с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто потому, что сглаживающая схема не нужна, что позволяет получить компактную конструкцию по низкой цене.
2) Таким же образом возможна конструкция с длительным сроком службы, поскольку не нужен большой алюминиевый электролитический конденсатор.
3) Переключение выполняется только один раз в каждом полупериоде стандартного источника питания переменного тока, что снижает уровень генерируемого шума.
2.1.3. Характеристики
Электродвигатели переменного тока с регулированием скорости вращения обычно имеют характеристики скорости вращения и крутящего момента, показанные на рис. 12.
Рис. 12. «Линия безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, то катушка соединена звездой (звездой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов на каждый оборот ротор.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики скорости вращения бесщеточного двигателя постоянного тока имеют отрицательный наклон, когда его скорость не регулируется, что аналогично характеристике коллекторного двигателя постоянного тока.
Рис. 15 Характеристики вращательного момента бесщеточного двигателя постоянного тока скорость N1. Когда приложен момент нагрузки T1, рабочая точка смещается к Q, а скорость вращения уменьшается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Это управление напряжением реализовано инвертором в выходной части схемы управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как показано на рис. 16 (b), с помощью шести переключающих элементов (FET или IGBT), показанных на рис. 16 (a).
Рис. 16 (a) Выходная часть цепи управления (драйвер)
Рис. 16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис. 16 (а), а состояние ВКЛ/ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
 В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12). На рис. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис. 17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от микросхемы Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от интегральной схемы Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом задания скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения. Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.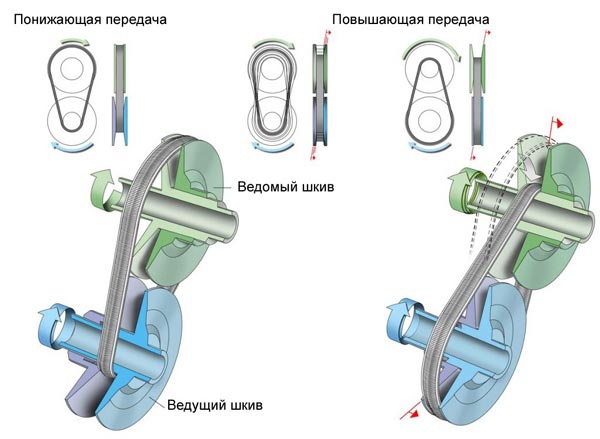
1) Он имеет высокий КПД, так как используется ротор с постоянными магнитами, а вторичные потери малы.
2) Можно уменьшить инерцию ротора и получить высокоскоростную реакцию.
3) Двигатель можно уменьшить, поскольку он очень эффективен.
4) Небольшие колебания скорости при изменении нагрузки.
На рис. 16 показана типичная последовательность переключения (метод подачи питания на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, подаваемых методом синусоидального привода и методом 120-градусного привода
2.2.3. Характеристики
Характеристики скорости вращения бесщеточного двигателя постоянного тока имеют ограниченный рабочий диапазон в дополнение к непрерывному рабочему диапазону.
Зона ограниченного режима работы очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, активируется функция защиты привода от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок регулирует скорость трехфазного асинхронного двигателя путем изменения частоты f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f путем изменения цикла ВКЛ/ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120· f ·(1- s )/ P ·· · · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ/ВЫКЛ, как показано на рис. 21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
Рис. 19 Управление работой ВКЛ/ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление без обратной связи, которое просто изменяет скорость, и управление с обратной связью, которое снижает скорость изменение при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация системы управления в виде блок-схемы.
Рис. 20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частота может быть установлена до 80 Гц) просто тогда, когда регулирование скорости при различных нагрузках не так важно.
Создаваемый крутящий момент T двигателя определяется формулой (2). Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если V/f, отношение напряжения V к частоте f, будет постоянным.
T = K ・ I・V / f ・・・9(920)
t : крутящий момент [n · m] Однако, чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f. Следовательно, чтобы получить постоянный крутящий момент от низкой скорости до высокой, необходимо отрегулировать отношение V/f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рис. 23. Рис. 21 Управление V/f 2) Управление с обратной связью Рис. 22 Блок-схема управления с обратной связью Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя данные характеристик. таблице (рис. 25), подготовленной заранее, и регулирует частоту преобразователя без необходимости использования датчика скорости на двигателе. Рис. 23 Таблица данных характеристик С помощью этой таблицы характеристик и обнаруженного времени разности фаз t инвертор рассчитывает выходную частоту инвертора, которая соответствует команде скорости вращения Nset, установленной потенциометром скорости, и выводит ее. как выходная частота инвертора. После получения выходной частоты блок управления V/f вычисляет напряжение, подаваемое на двигатель, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. 2.3.2. Характеристика s Характеристики скорости вращения и крутящего момента инверторного блока показаны на Рис. 26 и Рис. 27. Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы. Рис. 24. Характеристики скорости вращения для управления без обратной связи ) для использования в широком диапазоне приложений управления скоростью. Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.
v : напряжение источника питания [V]
i : Моторный ток [A]
f : Частота [HZ]
: :
40475 : : hairtence [a]
f .
На рис.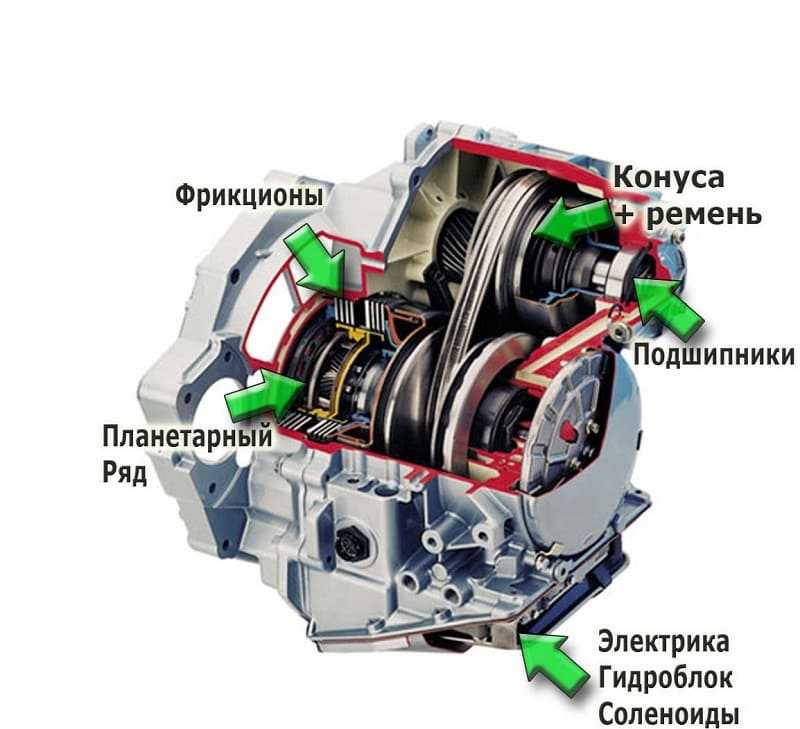 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF. В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)