Датчики углового положения коленчатого и распределительного вала.
Микропроцессорное управление двигателем
Работоспособность любой системы зажигания зависит от информации об угле поворота коленчатого вала двигателя. Датчик углового положения коленчатого вала выдерживает жесткие условия работы в отсеке двигателя, должен обладать высокой надежностью, и при этом работать на любой частоте вращения коленчатого вала.
В настоящее время автомобильные системы зажигания используют ряд бесконтактных датчиков, работа которых основывается на различных физических явлениях. К ним относятся следующие датчики:
- магнитоэлектрические;
- работающие на эффекте Холла;
- высокочастотные;
- оптоэлектронные;
- токовихревые;
- работающие на эффекте Виганда;
- фотоэлектрические.
***
Магнитоэлектрические датчики
Наиболее распространенным типом магнитоэлектрического датчика является генераторный датчик коммутаторного типа с пульсирующим потоком. Его принцип действия заключается в изменении магнитного сопротивления магнитной цепи, содержащей магнитную обмотку, при изменении зазора с помощью распределителя потока (коммутатора).
Его принцип действия заключается в изменении магнитного сопротивления магнитной цепи, содержащей магнитную обмотку, при изменении зазора с помощью распределителя потока (коммутатора).
При вращении зубчатого ротора в обмотке статора в соответствии с законом индукции возникает переменное напряжение. Когда один из зубцов ротора 4 приближается к полюсу статора, в обмотке 3 растет напряжение. При совпадении фронта зубца ротора с полюсом статора (со средней линией обмотки) напряжение на обмотке достигает максимума, затем быстро меняет знак и увеличивается в противоположном направлении до максимума при удалении зубца ротора. Напряжение очень быстро изменяется от положительного до отрицательного максимумов, поэтому нулевой переход (точка 0) между двумя максимумами используется для управления системой зажигания и получения точного момента подачи искры в цилиндр двигателя.
Однако точку перехода сложно уловить с помощью электроники, поскольку схема будет чувствительна к сигналам помех, т. е. не будет удовлетворять требованиям помехозащищенности. Поэтому для получения момента искрообразования используют точки максимума амплитуд (отрицательную или положительную), которые выбираются на допустимо низких уровнях. При этом обеспечивается нечувствительность схемы детектирования к помехам и надежное срабатывание схемы в период пуска двигателя.
Распределитель потока (зубчатый ротор) устанавливается на распределительный валик распределителя зажигания. Число его зубцов зависит от числа цилиндров двигателя. Магнитное поле создается, как правило, постоянным магнитом.
Рассмотренная выше магнитная система генераторного датчика очень чувствительна к влиянию паразитных изменений зазора, имеющих место из-за конструктивных допусков, износов, вибраций, передаваемых двигателем деталям, входящим в состав магнитной цепи. Это приводит к асинхронности момента искрообразования по цилиндрам двигателя.
Принципиальная схема генераторного датчика коммутаторного типа с симметричной магнитной системой для четырехцилиндрового двигателя приведена на рис. 3 .
Создание постоянных магнитов на основе новых магнитных материалов, таких, как магнитопласты, магниторезина, позволило резко снизить стоимость и массу датчиков, увеличить их надежность.
***
Датчики с переменным потоком
Датчик с переменным потоком состоит из неподвижной катушки и постоянного магнита, жестко связанного с валиком распределителя зажигания, причем число пар полюсов в магните равно количеству цилиндров двигателя. Такие магнитные системы называются датчиками с вращающимися магнитами ( рис. 4 ).
Работа датчика определяется знакопеременным магнитным потоком и симметричной формой выходного напряжения. Сигнал датчика с вращающимся магнитом требует более тщательной обработки в цепи детектирования для компенсации электрического смещения момента искрообразования в зоне низких частот вращения валика распределителя зажигания.
Сигнал датчика с вращающимся магнитом требует более тщательной обработки в цепи детектирования для компенсации электрического смещения момента искрообразования в зоне низких частот вращения валика распределителя зажигания.
***
Датчики, работающие на эффекте Холла
Благодаря развитию микроэлектроники широкое распространение получили датчики углового положения, работающие на эффекте Холла. Эффект Холла возникает в пластине из проводника или полупроводника при внесении ее в магнитное поле и пропускании через пластину электрического тока. При определенных условиях между противоположными гранями пластины возникает ЭДС Холла, которая может использоваться в качестве сигнала для определения момента искрообразования.
Датчики на эффекте Холла обладают такими достоинствами, как малая стоимость производства, относительно высокая точность и хорошая стойкость к внешним воздействиям. Поэтому они широко примененяются в автомобилестроении в качестве датчиков углового положения (ДПКВ, ДПРВ и т.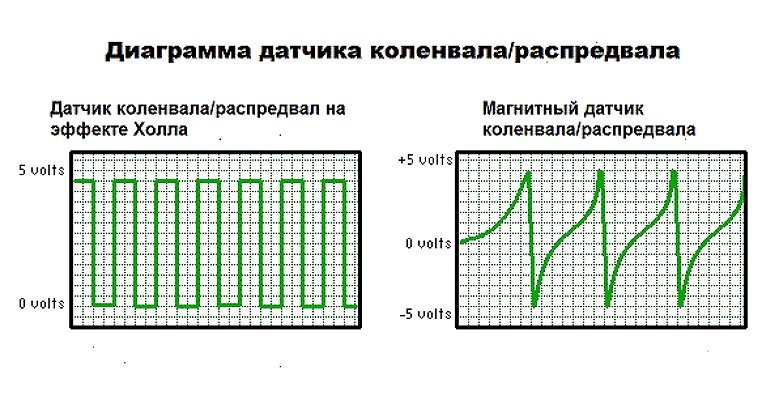 п.).
п.).
Недостатком систем, работающих на эффекте Холла, является высокая чувствительность к внешним магнитным и электрическим помехам. Величина ЭДС Холла очень мала, поэтому должна быть усилена непосредственно вблизи датчика для того, чтобы устранить влияние радио- и электропомех. Поэтому конструктивно датчики Холла часто выполняются в виде интегральной микросхемы, содержащей усилитель сигнала.
При изготовлении полупроводниковых пластин датчиков Холла наиболее часто используются германий ( Ge), кремний (Si), арсенид галлия (GaAs), арсенид индия (InAs), антимонид индия (InSb).
***
Датчики Виганда
Принцип действия таких датчиков основан на эффекте Виганда.
Джон Ричард Виганд (John R. Wiegand) — американский физик и изобретатель. Открыл, описал и исследовал физический феномен, который возникает в специальной «проволоке Виганда» при помещении её в магнитное поле.
Феномен, описанный Д. Вигандом заключается в том, что если ферромагнитную проволоку, имеющую специальный химический состав и физическую структуру, внести в магнитное поле, то произойдет спонтанное изменение ее магнитной поляризации, как только напряженность поля превысит некоторое предельное значение, называемое порогом зажигания. Изменение состояния проволоки Виганда можно регистрировать при помощи электромагнитной обмотки, размещенной рядом с ней. Проволока Виганда представляет собой ферромагнитное тело, состоящее из магнитомягкой сердцевины и магнитотвердой внешней оболочки.
Изменение состояния проволоки Виганда можно регистрировать при помощи электромагнитной обмотки, размещенной рядом с ней. Проволока Виганда представляет собой ферромагнитное тело, состоящее из магнитомягкой сердцевины и магнитотвердой внешней оболочки.
Проволока изготавливается из специального ферромагнитного сплава типа викаллой (примерный состав — 10% ванадия, 52% кобальта и железа). Точный состав материала проволоки, а также технология ее изготовления, как правило, являются секретом фирм, производящих датчики.
Чувствительные элементы Виганда применяются в датчиках скорости, угла поворота и положения, в расходомерах, для считывания пластиковых идентификационных карт и других технических устройствах.
К достоинствам датчиков Виганда следует отнести независимость от влияния внешних электрических и магнитных полей, широкий температурный диапазон работы, работу без источника питания.
***
Сельсины и дифференциальные трансформаторы
В последние годы в качестве датчиков абсолютного углового положения на автомобилях иногда используются вращающиеся трансформаторы (сельсины), которые характеризуются высокой разрешающей способностью (до 7‘) и работают в тяжелых внешних условиях. Однако широкого распространения такие датчики пока не получили из-за высокой стоимости.
Однако широкого распространения такие датчики пока не получили из-за высокой стоимости.
Обмотки возбуждения сельсинов питаются напряжением с частотой 400…20000 Гц, обычно для автомобилей 2…5 кГц. Угловое положение ротора декодируется по сигналам с синусной и косинусной обмоток специальной микросхемой в цифровой код.
В качестве датчиков абсолютного линейного положения находят применение линейные дифференциальные трансформаторы. Выходной сигнал таких датчиков может быть декодирован специализированной интегральной схемой.
***
Магниторезистивные датчики
В магниторезистивных датчиках используется способность некоторых материалов, например, железо-никелевого сплава FeNi, изменять свое сопротивление под воздействием переменной напряженности магнитного поля. В рабочем диапазоне магниторезистора его сопротивление меняется в пределах 2,5…15%. Магниторезисторы встраивают в интегральную схему, где размещают и цепи обработки сигнала.
***
Автомобильные бензины
Главная страница
- Страничка абитуриента
Дистанционное образование
- Группа ТО-81
- Группа М-81
- Группа ТО-71
Специальности
- Ветеринария
- Механизация сельского хозяйства
- Коммерция
- Техническое обслуживание и ремонт автотранспорта
Учебные дисциплины
- Инженерная графика
- МДК.01.01. «Устройство автомобилей»
- Карта раздела
- Общее устройство автомобиля
- Автомобильный двигатель
- Трансмиссия автомобиля
- Рулевое управление
- Тормозная система
- Подвеска
- Колеса
- Кузов
- Электрооборудование автомобиля
- Основы теории автомобиля
- Основы технической диагностики
- Основы гидравлики и теплотехники
- Метрология и стандартизация
- Сельскохозяйственные машины
- Основы агрономии
- Перевозка опасных грузов
- Материаловедение
- Менеджмент
- Техническая механика
- Советы дипломнику
Олимпиады и тесты
- «Инженерная графика»
- «Техническая механика»
- «Двигатель и его системы»
- «Шасси автомобиля»
- «Электрооборудование автомобиля»
Новости из мира УАЗ — Как узнать о неисправности датчика коленвала
Датчик коленвала предназначен для синхронизации работы системы зажигания и топливных форсунок. В случае выхода устройства из строя, нарушается стабильность работы подачи топлива, либо происходит полное прекращение подачи топлива, что может стать причиной остановки работы мотора и невозможности завести его повторно.
В случае выхода устройства из строя, нарушается стабильность работы подачи топлива, либо происходит полное прекращение подачи топлива, что может стать причиной остановки работы мотора и невозможности завести его повторно.
Работающий датчик позволяет микроконтроллеру определять положение поршней в цилиндрах. На коленвале установлено зубчатое колесо с двумя пропущенными зубчиками. При прохождении рядом с датчиком, зубчики искажают его магнитное поле, в результате чего формируются специальные импульсы в катушке индуктивности. Отсутствующие зубчики – это стартовая точка определения микроконтроллером исходного положения коленчатого вала. Компьютер автоматически считает число импульсов, проходящих от датчика, а также определяет положение коленвала, на основе чего рассчитывается время для срабатывания системы зажигания и топливных форсунок.
Датчик располагается в кронштейне, который установлен в области шкива привода генератора. Он монтируется с небольшим зазором в районе 1-1,2 мм возле зубчатого шкива. Такое местоположение очень неудобно для проникновения, потому к нему присоединен провод длиной 70 см с необходимыми разъемами. Для выставления необходимого положения требуется регулировка шайб между посадочным гнездом данного элемента.
Такое местоположение очень неудобно для проникновения, потому к нему присоединен провод длиной 70 см с необходимыми разъемами. Для выставления необходимого положения требуется регулировка шайб между посадочным гнездом данного элемента.
Существует целый ряд ошибок транспортного средства, которые могут свидетельствовать о выходе датчика из строя, а именно:
- Быстрое снижение мощности машины, которое определяется физически, без применения измерительных и диагностических устройств.
- Произвольное снижение или увеличение оборотов мотора.
- Детонация во время динамической нагрузки в двигателе.
- Двигатель не включается при повороте ключа.
- При движении транспортного средства на холостом ходу происходят неустойчивые обороты мотора.
- Полное отсутствие холостого хода транспортного средства.
При этом не обязательно обращаться к специалистам при необходимости точно убедиться в неисправности датчика коленвала, это можно сделать самостоятельно.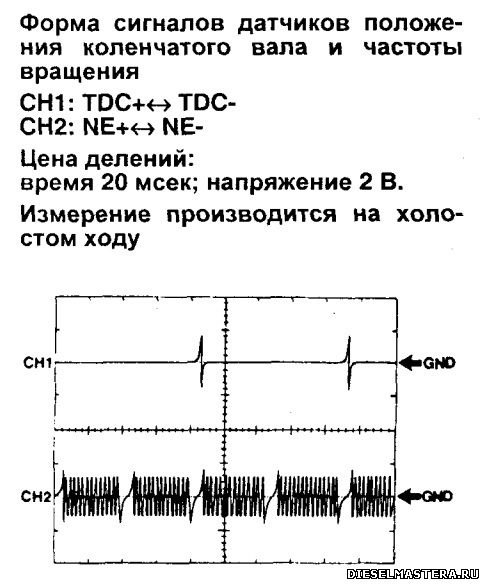 Для этого можно использовать несколько доступных вариантов действий, которые различаются видом применяемых приборов.
Для этого можно использовать несколько доступных вариантов действий, которые различаются видом применяемых приборов.
Пожалуй, один из самых простых способов диагностики предполагает предварительный демонтаж проверяемого устройства. Для этого необходимо сделать сначала отметки об изначальном положении датчика. Рекомендуется также осуществить контроль зазора между диском синхронизации и сердечником. Величина этого зазора должна составлять в диапазоне от 0,6 до 1,5 мм.
После демонтажа необходимо проверить датчик на наличие видимых повреждений. Чтобы лучше рассмотреть устройство, измеритель вместе с его контактами рекомендуется
тщательно протереть тряпкой, обильно смоченной в спирте. Если визуальный осмотр не позволил выявить никаких повреждений и неисправностей, то необходимо переходить к проверке электрической схемы.
Для диагностики требуется проверка сопротивления обмотки на катушке с использованием омметра. Если на табло устройства отображается цифра в диапазоне 550-700 Ом, то это свидетельствует об исправности датчика. Если же прибор показывает другие цифры, либо устройство вообще не реагирует на измерения, то измеритель положения коленчатого вала неисправен.
Если же прибор показывает другие цифры, либо устройство вообще не реагирует на измерения, то измеритель положения коленчатого вала неисправен.
Существует также методика более тщательной проверки, при которой изучается:
- сопротивление обмотки;
- сопротивление изоляции;
- намагниченность измерителя.
Чтобы выполнить такую диагностику необходимо использовать специальное оборудование, включая: мегомметр, сетевой трансформатор, цифровой вольтметр, а также устройство для измерения индуктивности.
При этом важно знать, что изменения будут более точными и актуальными, если они будут проведены при температуре окружающей среды не выше 20 градусов Цельсия.
Если проверка не позволила выявить никаких проблем с датчиком, то необходимо перейти к исследованию шкива. В некоторых случаях проблема заключается в том, что шкив не плотно установлен на вале. Это может привести к неправильной подаче измерителем импульсов. Еще одна распространенная причина проблемы – колесо с зубьями, в некоторых случаях один или несколько зубьев могут отломиться.
Однако на практике до глубокой проверки датчика дело доходит крайне редко. В большинстве случаев для выявления неисправности достаточно проведения ранее описанной простой диагностики с визуальным осмотром и использованием омметра.
Схема датчика положения коленчатого вала для обеспечения стабильных циклических выходных сигналов без учета пиковых колебаний сигналов датчиков
2. Описание предшествующего уровня техники
За последние несколько лет в автомобилестроении наметилась тенденция к отказу от традиционных систем механических прерывателей, которые передавали синхронизирующие импульсы в системы зажигания, которые, в свою очередь, подавали правильно синхронизированную энергию искры на отдельные свечи зажигания двигателя. Одной из наиболее популярных замен стандартной системы механического прерывателя является датчик Холла в сочетании с вращающимся ферромагнитным шунтирующим элементом, прикрепленным к распределительному валу или коленчатому валу двигателя. Датчик Холла электрически соединен с полупроводниковым усилителем для создания сигнала пульсирующего напряжения на первичной обмотке катушки зажигания.
Датчик Холла электрически соединен с полупроводниковым усилителем для создания сигнала пульсирующего напряжения на первичной обмотке катушки зажигания.
Типичный датчик и схема показаны в патенте США No. № 3875920, в котором многолопастное шунтирующее колесо установлено в распределителе с возможностью вращения вместе с валом распределителя. Когда шунтирующее колесо вращается, отдельные маневровые лопатки из черных металлов вращаются в непосредственной близости от датчика Холла и постоянного магнита, расположенного рядом с датчиком Холла. Непосредственная близость любой лопасти приводит к уменьшению магнитного поля на датчике и тем самым влияет на его электрический выходной сигнал. По мере того как лопасть вращается вокруг датчика Холла, магнитное поле на датчике увеличивается, что приводит к увеличению выходного электрического сигнала датчика. Таким образом, датчик Холла генерирует циклический сигнал, который показывает скорость вращения шунтирующего колеса и синхронизируется с положением. Усилительная схема, как описано в этом патенте, используется для управления триггерной схемой Шмитта, когда выходной уровень датчика Холла превышает определенный заданный уровень. Точно так же, когда сигнал от датчика Холла опускается ниже другого заданного уровня, выходной сигнал триггера Шмитта возвращается к низкому уровню.
Усилительная схема, как описано в этом патенте, используется для управления триггерной схемой Шмитта, когда выходной уровень датчика Холла превышает определенный заданный уровень. Точно так же, когда сигнал от датчика Холла опускается ниже другого заданного уровня, выходной сигнал триггера Шмитта возвращается к низкому уровню.
Обычно выходной сигнал датчика Холла представляет собой циклический сигнал с высокими и низкими пиковыми значениями, которые нерегулярны и изменяются по отношению друг к другу. Кроме того, дифференциальное напряжение, полученное от датчика Холла, обеспечивает смещение для переменного пикового циклического сигнала, и это также может варьироваться от датчика к датчику в зависимости от силы магнита, коэффициента напряжения Холла и значения напряжения смещения.
Колебания размаха напряжения являются обычным явлением в датчиках на эффекте Холла, поскольку лопастные шунтирующие колеса, такие как показано в патенте США No. № 3875,920 и рассмотренные выше, не являются точно изготовленными элементами и, следовательно, могут быть либо эксцентрично установлены на валу, либо лопасти могут иметь небольшие изгибы, что приводит к изменению расстояния между отдельными лопастями и датчиком на эффекте Холла при вращении шунтирующего колеса вокруг вала.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является преодоление проблем предшествующего уровня техники путем создания усилителя формирования сигнала с самонастраивающимся порогом для использования с датчиком на эффекте Холла или датчиком аналогичного типа, который вырабатывает стабильные циклические выходные сигналы независимо от размаха сигналов датчика, величины стационарного магнитного поля или напряжения смещения.
Еще одной целью настоящего изобретения является создание усилителя формирования сигнала для использования с датчиком на эффекте Холла, в котором выходной сигнал представляет собой копию напряжения профиля вращающегося шунтирующего колеса, имеющего секции, расположенные на разных расстояниях от датчика на эффекте Холла по мере вращения колеса.
Еще одной задачей настоящего изобретения является создание усилителя формирования сигнала с самонастраивающимся пороговым значением, при котором верхние и нижние пиковые значения входного циклического сигнала соответственно дискретизируются и сохраняются для получения порогового уровня, который сравнивается с усиленным циклически изменяющимся входным сигналом.
Еще одной задачей настоящего изобретения является создание усилителя, который автоматически адаптирует заменяемые входные сигнальные устройства для обеспечения предсказуемого напряжения выходного сигнала.
Настоящее изобретение решает вышеупомянутые задачи путем предоставления схемы линейного дифференциального усилителя, которая отслеживает дифференциальное напряжение от смещенного датчика Холла. Датчик отслеживает вращение рабочего колеса из черных металлов, имеющего конфигурацию высокого-низкого профиля, что влияет на изменение воздушного зазора между датчиком и колесом при вращении колеса. Цепь отрицательной обратной связи связана с дифференциальным входным усилителем, чтобы предотвратить насыщение усилителя. Цепь отрицательной обратной связи содержит серию транзисторов, соединенных между собой база-коллектор, которые образуют схему делителя напряжения, в которой различные уровни усиленного входного сигнала контролируются в трех отдельных точках. Схема детектора минимального пикового значения отслеживает первую точку в цепи отрицательной обратной связи и сохраняет напряжение, имеющее значение, соответствующее минимальным пиковым значениям циклически изменяющегося входного сигнала. Детектор максимального пикового значения отслеживает вторую точку в цепи отрицательной обратной связи и сохраняет напряжение, имеющее значение, соответствующее максимальным пиковым значениям циклически изменяющегося входного сигнала. Третья точка цепи отрицательной обратной связи подает усиленный входной сигнал на усилитель-компаратор. Схемы детектора минимального пика и детектора максимального пика подключены к напряжению питания через сеть делителя напряжения порогового уровня, которая отводится для обеспечения заданного дробного уровня по отношению к разнице между значением минимального пикового напряжения и максимальным значением пикового напряжения, выдаваемым соответствующими детекторами. Уровень напряжения отвода обеспечивает пороговое опорное напряжение, которое подается на один входной порт усилителя-компаратора и сравнивается с усиленным входным сигналом из третьей точки цепи отрицательной обратной связи. Выходной сигнал компаратора представляет собой сигнал прямоугольной формы, который изменяется от нуля до насыщенного выходного напряжения и обратно для каждого цикла входного сигнала без учета изменений пиковых значений входного сигнала.
Детектор максимального пикового значения отслеживает вторую точку в цепи отрицательной обратной связи и сохраняет напряжение, имеющее значение, соответствующее максимальным пиковым значениям циклически изменяющегося входного сигнала. Третья точка цепи отрицательной обратной связи подает усиленный входной сигнал на усилитель-компаратор. Схемы детектора минимального пика и детектора максимального пика подключены к напряжению питания через сеть делителя напряжения порогового уровня, которая отводится для обеспечения заданного дробного уровня по отношению к разнице между значением минимального пикового напряжения и максимальным значением пикового напряжения, выдаваемым соответствующими детекторами. Уровень напряжения отвода обеспечивает пороговое опорное напряжение, которое подается на один входной порт усилителя-компаратора и сравнивается с усиленным входным сигналом из третьей точки цепи отрицательной обратной связи. Выходной сигнал компаратора представляет собой сигнал прямоугольной формы, который изменяется от нуля до насыщенного выходного напряжения и обратно для каждого цикла входного сигнала без учета изменений пиковых значений входного сигнала.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
РИС. 1 представляет собой схему предпочтительного варианта осуществления изобретения.
РИС. 2 показан типичный выходной сигнал датчика Холла.
РИС. 3 показаны различные формы сигналов, наблюдаемые в обозначенных точках схемы, показанной на фиг. 1.
РИС. 4 иллюстрирует выходной сигнал V схемы, показанной на фиг. 1.
РИС. 5 иллюстрирует выходной сигнал V схемы, показанной на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ВОПЛОЩЕНИЯ
Схема цепи, которая воплощает настоящее изобретение, показана на фиг. 1. Эта цепь получает питание от источника постоянного тока, обозначенного как B, и управляется включением/выключением питания с помощью переключателя 46. Нагрузочный резистор 84 в сочетании со стабилитроном 80 и конденсатором 82 обеспечивает регулируемое напряжение 5 вольт с высокочастотной фильтрацией для схемы.
Обычная сенсорная ячейка 16 с эффектом Холла подключается обычным образом, так что между проводниками 15 и 19 прикладывается постоянное напряжение смещения. ячейки 16 на эффекте Холла. Постоянный магнит 20 обеспечивает необходимое поле магнитного потока для ячейки датчика Холла 16, и любое возмущение этого поля магнитного потока, например, из-за увеличения или уменьшения плотности потока в ячейке 16, влияет на выходное напряжение ячейки 16 на эффекте Холла на выходных проводах 17 и 18. со скоростью, пропорциональной частоте вращения двигателя транспортного средства. Колесо 10 может быть установлено на распределительном валу или на коленчатом валу для контроля частоты вращения двигателя транспортного средства и положения вала. Он вращается вокруг оси «А» и сделан из черного металла. Профиль приводного колеса 10 определяет множество секций 12 магнитной связи, равномерно расположенных вокруг центра колеса 10 и проходящих по заданной дуге. Поэтому по мере приближения удлиненных секций 12 к ячейке 16 на эффекте Холла магнитный поток концентрируется от магнита через сужающиеся воздушные зазоры. Между каждой из проходящих в радиальном направлении секций 12 находится сегмент с более длинным воздушным зазором 14.
ячейки 16 на эффекте Холла. Постоянный магнит 20 обеспечивает необходимое поле магнитного потока для ячейки датчика Холла 16, и любое возмущение этого поля магнитного потока, например, из-за увеличения или уменьшения плотности потока в ячейке 16, влияет на выходное напряжение ячейки 16 на эффекте Холла на выходных проводах 17 и 18. со скоростью, пропорциональной частоте вращения двигателя транспортного средства. Колесо 10 может быть установлено на распределительном валу или на коленчатом валу для контроля частоты вращения двигателя транспортного средства и положения вала. Он вращается вокруг оси «А» и сделан из черного металла. Профиль приводного колеса 10 определяет множество секций 12 магнитной связи, равномерно расположенных вокруг центра колеса 10 и проходящих по заданной дуге. Поэтому по мере приближения удлиненных секций 12 к ячейке 16 на эффекте Холла магнитный поток концентрируется от магнита через сужающиеся воздушные зазоры. Между каждой из проходящих в радиальном направлении секций 12 находится сегмент с более длинным воздушным зазором 14. Обычно, когда ячейка на эффекте Холла этого типа используется в качестве устройства позиционирования коленчатого вала в двигателе внутреннего сгорания, количество проходящих в радиальном направлении секций 12 соответствует половине числа цилиндров в двигателе. В этом случае, когда на приводном колесе 10 обозначены четыре проходящих в радиальном направлении участка 12, можно предположить, что восьмицилиндровый двигатель управляется системой зажигания.
Обычно, когда ячейка на эффекте Холла этого типа используется в качестве устройства позиционирования коленчатого вала в двигателе внутреннего сгорания, количество проходящих в радиальном направлении секций 12 соответствует половине числа цилиндров в двигателе. В этом случае, когда на приводном колесе 10 обозначены четыре проходящих в радиальном направлении участка 12, можно предположить, что восьмицилиндровый двигатель управляется системой зажигания.
Хорошо известно, что в датчике на эффекте Холла при изменении воздушного зазора между сенсорной частью 16 и исполнительным колесом 10, например, при вращении, выходное напряжение на линиях 17 и 18 будет соответственно изменяться. В этом случае приводное колесо содержит 4 радиально проходящих секции 12, разделенных четырьмя более длинными воздушными зазорами 14, и очевидно, что выходной сигнал ячейки 16 на эффекте Холла имеет форму прямоугольной волны, имеющей высокие и низкие пиковые значения, соответствующие сегментам, создающим высокое и низкое уплотнение потока в ячейке Холла.
РИС. 2 показана форма волны, которая обычно может быть получена из выходного сигнала датчика Холла, полученного за конкретный период времени. Дифференциальное напряжение, представляющее собой напряжение на линии 17, вычитаемое из напряжения на линии 18, приводит к прямоугольному сигналу, который приблизительно соответствует двоичному профилю приводного колеса 10. Однако можно также видеть, что имеется смещение напряжения, благодаря которому результирующий прямоугольный выходной сигнал ячейки 16 на эффекте Холла смещен от нуля вольт примерно на 25 милливольт. Напряжение смещения может различаться между заменяемыми датчиками, поскольку оно зависит от тока смещения, протекающего между линиями 15 и 19., плотность потока и расстояние между постоянным магнитом 20 и ячейкой Холла 16.
РИС. 2 также показано, что выходной сигнал ячейки 16 на эффекте Холла на линиях 17 и 18, хотя и имеет форму прямоугольной волны, меняет свои пиковые значения по всему профилю исполнительного колеса 10. Такое изменение пиковых значений является обычным явлением в датчиках на эффекте Холла, поскольку исполнительные колеса, такие как 10, не являются высокоточными элементами и, следовательно, могут иметь некоторые изменения в длине радиально проходящих секций 12. Кроме того, хотя колесо установлено с возможностью вращения вокруг оси А, оно может быть установлен так, чтобы иметь небольшой эксцентриситет из-за неточной установки. Любая из вышеупомянутых проблем может привести к различным воздушным зазорам и шунтированию поля, которые вызывают соответствующие изменения в выходном сигнале, как показано на фиг. 2.
Такое изменение пиковых значений является обычным явлением в датчиках на эффекте Холла, поскольку исполнительные колеса, такие как 10, не являются высокоточными элементами и, следовательно, могут иметь некоторые изменения в длине радиально проходящих секций 12. Кроме того, хотя колесо установлено с возможностью вращения вокруг оси А, оно может быть установлен так, чтобы иметь небольшой эксцентриситет из-за неточной установки. Любая из вышеупомянутых проблем может привести к различным воздушным зазорам и шунтированию поля, которые вызывают соответствующие изменения в выходном сигнале, как показано на фиг. 2.
Снова обратимся к фиг. 1, циклический сигнал, выходящий из ячейки 16 на эффекте Холла по линиям 17 и 18, вводится в линейный дифференциальный усилитель 28 через соответствующие отрицательный и положительный входные порты. Схема температурной компенсации содержит резистор 22, включенный последовательно с термистором 24, и эта последовательная комбинация подключена параллельно резистору 26. Цепь температурной компенсации находится между линией 17 от ячейки 16 на эффекте Холла и отрицательным входным портом линейного дифференциального усилителя 28. Схема температурной компенсации образует резистивную цепь с регулируемой температурой, которая эффективно управляет коэффициентом усиления дифференциального усилителя 28 вместе с резистором 32 обратной связи для компенсации изменений входного сигнала, генерируемого ячейкой на эффекте Холла 16 из-за изменений температуры. Сигналы были измерены при соотношении 2:1 между 125°C и -20°C. Таким образом, регулируя коэффициент усиления дифференциального усилителя 28 в зависимости от температуры, можно компенсировать известные систематические изменения входного напряжения, вызванные температурой, и предотвратить переход усилителя в состояние насыщения.
Цепь температурной компенсации находится между линией 17 от ячейки 16 на эффекте Холла и отрицательным входным портом линейного дифференциального усилителя 28. Схема температурной компенсации образует резистивную цепь с регулируемой температурой, которая эффективно управляет коэффициентом усиления дифференциального усилителя 28 вместе с резистором 32 обратной связи для компенсации изменений входного сигнала, генерируемого ячейкой на эффекте Холла 16 из-за изменений температуры. Сигналы были измерены при соотношении 2:1 между 125°C и -20°C. Таким образом, регулируя коэффициент усиления дифференциального усилителя 28 в зависимости от температуры, можно компенсировать известные систематические изменения входного напряжения, вызванные температурой, и предотвратить переход усилителя в состояние насыщения.
Выход линейного дифференциального усилителя 28 подключен к схеме детектора минимальных пиков, состоящей из транзистора 42 и конденсатора 54. Выходной сигнал линейного дифференциального усилителя 28 показан на фиг. 3, как нижний сигнал, имеющий напряжение смещения приблизительно 1,2 вольта. При подаче сигнала выходного напряжения линейного усилителя 28 на базу PNP-транзистора 42 зарядка конденсатора 54 управляется током, протекающим через транзистор 42 и последовательный токоограничивающий резистор 56. В течение первой четверти оборота приводного колеса 10 конденсатор 54 быстро заряжается до значения, которое представляет минимальные пиковые значения циклического входного сигнала от ячейки 16 на эффекте Холла. Всякий раз, когда входной сигнал превышает это минимальное значение, заряд конденсатора 5 4 поддерживается на этом, по существу, постоянном уровне, при этом единственным путем разряда является очень высокий импеданс, обеспечиваемый обратносмещенным переходом база-эмиттер транзистора 42, включенным последовательно с резистором 56, и малой нагрузкой базы транзистора 70.
3, как нижний сигнал, имеющий напряжение смещения приблизительно 1,2 вольта. При подаче сигнала выходного напряжения линейного усилителя 28 на базу PNP-транзистора 42 зарядка конденсатора 54 управляется током, протекающим через транзистор 42 и последовательный токоограничивающий резистор 56. В течение первой четверти оборота приводного колеса 10 конденсатор 54 быстро заряжается до значения, которое представляет минимальные пиковые значения циклического входного сигнала от ячейки 16 на эффекте Холла. Всякий раз, когда входной сигнал превышает это минимальное значение, заряд конденсатора 5 4 поддерживается на этом, по существу, постоянном уровне, при этом единственным путем разряда является очень высокий импеданс, обеспечиваемый обратносмещенным переходом база-эмиттер транзистора 42, включенным последовательно с резистором 56, и малой нагрузкой базы транзистора 70.
Выход линейного дифференциального усилителя 28 также соединен с базой PNP-транзистора 40, коллектор которого соединен с землей, а эмиттер соединен последовательно с множеством транзисторов 38, 36 и 34, соединенных диодами, в цепи отрицательной обратной связи с резистором обратной связи 32. База и коллектор PNP-транзистора 38 обычно подключены к эмиттеру транзистора 40. Эмиттер NPN-транзистора 36 подключен к эмиттер транзистора 38 в точке, обозначенной буквой «Y», а эмиттер NPN-транзистора 34 соединен с общим соединением база-коллектор транзистора 36. Соединение база-коллектор транзистора 34 соединено с переходом между резистором 30 и резистором обратной связи 32 в точке, обозначенной буквой «W». Другая сторона резистора 30 подключена к регулируемому источнику питания 5 вольт. Резистор 32 обратной связи работает в сочетании с описанной выше схемой температурной компенсации для установки коэффициента усиления линейного дифференциального усилителя 28 и предотвращения перехода усилителя в состояние насыщения либо на верхнем, либо на нижнем конце его рабочей кривой.
База и коллектор PNP-транзистора 38 обычно подключены к эмиттеру транзистора 40. Эмиттер NPN-транзистора 36 подключен к эмиттер транзистора 38 в точке, обозначенной буквой «Y», а эмиттер NPN-транзистора 34 соединен с общим соединением база-коллектор транзистора 36. Соединение база-коллектор транзистора 34 соединено с переходом между резистором 30 и резистором обратной связи 32 в точке, обозначенной буквой «W». Другая сторона резистора 30 подключена к регулируемому источнику питания 5 вольт. Резистор 32 обратной связи работает в сочетании с описанной выше схемой температурной компенсации для установки коэффициента усиления линейного дифференциального усилителя 28 и предотвращения перехода усилителя в состояние насыщения либо на верхнем, либо на нижнем конце его рабочей кривой.
Влияние подключенных диодом транзисторов 38, 36 и 34 в обратной связи линейного дифференциального усилителя 28 заключается в обеспечении множества добавочных (база-эмиттер) падений напряжения примерно по 0,7 вольта каждое в сигнал обратной связи. Это происходит из-за тока смещения через резистор 30, подключенный диодом транзисторы 34, 36, 38 и транзистор 40 к земле. Когда линейный усилитель 28 заставляет транзистор 40 потреблять ток базы, этот ток базы усиливается. Напряжение база-эмиттер на транзисторе 40 составляет приблизительно 0,7 вольта. Следовательно, для входного сигнала, такого как показанный на фиг. 2, соотношение сигналов в обозначенных точках сети обратной связи показано на фиг. 3, разделенных инкрементными 0,7 вольт.
Это происходит из-за тока смещения через резистор 30, подключенный диодом транзисторы 34, 36, 38 и транзистор 40 к земле. Когда линейный усилитель 28 заставляет транзистор 40 потреблять ток базы, этот ток базы усиливается. Напряжение база-эмиттер на транзисторе 40 составляет приблизительно 0,7 вольта. Следовательно, для входного сигнала, такого как показанный на фиг. 2, соотношение сигналов в обозначенных точках сети обратной связи показано на фиг. 3, разделенных инкрементными 0,7 вольт.
В точке, обозначенной буквой «W», база NPN-транзистора 44 подключена для приема сигнала обратной связи этой точки. Коллектор транзистора 44 подключен к напряжению питания, а его эмиттер подключен к зарядному конденсатору 50 через токоограничивающий резистор 48. Функция транзистора 40 в сочетании с конденсатором 50 заключается в обнаружении максимальных пиковых значений усиленного циклического входного сигнала от ячейки 16 на эффекте Холла. максимального пикового значения сигнала в точке «X». Транзистор 44 включается всякий раз, когда уровень напряжения на «W» превышает напряжение эмиттера в достаточной степени, чтобы вызвать крутизну и зарядить конденсатор 50. Однако из-за падения напряжения база-эмиттер (примерно 0,7 вольта) на транзисторе 44 пиковое значение напряжения, хранящееся в конденсаторе 50, совпадает с показанным на осциллограмме «X». Таким образом, 0,7-кратное падение напряжения на транзисторе 34, соединенном с диодом, в цепи обратной связи компенсирует 0,7-кратное падение напряжения база-эмиттер на транзисторе 44. Заряд напряжения на конденсаторе 50 поддерживается на практически постоянном максимальном уровне, когда входной сигнал меньше максимального пика, поскольку пути разряда обратно через резистор 48 и эмиттер транзистора 44 и вперед в базу транзистора 58 имеют очень высокое сопротивление и большую постоянную времени разряда.
Однако из-за падения напряжения база-эмиттер (примерно 0,7 вольта) на транзисторе 44 пиковое значение напряжения, хранящееся в конденсаторе 50, совпадает с показанным на осциллограмме «X». Таким образом, 0,7-кратное падение напряжения на транзисторе 34, соединенном с диодом, в цепи обратной связи компенсирует 0,7-кратное падение напряжения база-эмиттер на транзисторе 44. Заряд напряжения на конденсаторе 50 поддерживается на практически постоянном максимальном уровне, когда входной сигнал меньше максимального пика, поскольку пути разряда обратно через резистор 48 и эмиттер транзистора 44 и вперед в базу транзистора 58 имеют очень высокое сопротивление и большую постоянную времени разряда.
Аналогично, описанная выше схема обнаружения минимального пика, содержащая транзистор 42 и конденсатор 54, приводит к тому, что конденсатор 54 сохраняет значение напряжения, соответствующее минимальным пиковым значениям, как показано на форме сигнала, обозначенной буквой «Z». В этом случае падение напряжения база-эмиттер на транзисторе 40, равное 0,7, компенсирует падение напряжения база-эмиттер на транзисторе 42.
Эмиттер транзистора 70 соединен с эмиттером транзистора 58 через цепь резистивного делителя напряжения, состоящую из резисторов 66 и 62. Значения резисторов 66 и 62 выбираются таким образом, чтобы определить относительный пороговый уровень между максимальным уровнем пикового напряжения, определяемым датчиком. схема обнаружения максимального пика и минимальное пиковое значение, определяемое схемой обнаружения минимального пика. В настоящем варианте осуществления резисторы 66 и 62 выбраны равными по значению, чтобы выбрать среднюю точку между максимальным и минимальным пиковыми значениями, и обозначены как линия среднего уровня на форме сигнала «Y», показанной на фиг. 3.
Напряжение на эмиттере передатчика 58 равно значению, хранящемуся в конденсаторе 50, за вычетом падения напряжения база-эмиттер примерно на 0,7 вольта. В этом случае возрастающее падение напряжения на транзисторе 36, подключенном к диоду, используется для компенсации возрастающего падения напряжения база-эмиттер на NPN-транзисторе 58, и, следовательно, напряжение на эмиттере транзистора 58 равно максимальному пику, присутствующему в форме сигнала «Y», показанной на фиг. 3.
3.
Аналогичным образом, напряжение на эмиттере транзистора 70 представляет собой значение, хранящееся в конденсаторе 54, за вычетом примерно 0,7 В приращенного падения напряжения база-эмиттер на транзисторе 70. Транзистор 38, подключенный к диоду, используется для постепенной компенсации падения напряжения эмиттер-база на PNP-транзисторе 70, а напряжение эмиттера на транзисторе 70 представляет собой минимальное пиковое обнаруженное напряжение, компенсированное до значения, равного наименьшему существующему пиковому значению. в форме волны «Y».
Практически постоянный пороговый уровень на стыке между резисторами 66 и 62 подается на положительный входной порт компаратора 68. Форма сигнала «Y», полученная от соединения эмиттеров транзисторов 38 и 36, подается через резистор 52 на отрицательный входной порт компаратора 68, где он сравнивается с пороговым уровнем. Следовательно, всякий раз, когда усиленный циклический входной сигнал «Y» от линейного усилителя 28 увеличивается до порогового уровня, который находится на среднем значении между максимальным пиковым обнаруженным значением и минимальным пиковым обнаруженным значением, схема 68 компаратора обратно обеспечивает выходной сигнал «V», показанный на фиг. 4, где выходной сигнал изменяется с состояния высокого уровня на состояние низкого уровня. Схема инвертора включает в себя транзистор 74, база которого соединена с соединением между последовательными резисторами 76 и 72, которые подключены между выходом компаратора 68 и землей. Инверторный транзистор 74 обеспечивает выходной сигнал на своем коллекторе, обозначенном буквой «V» и показанном на фиг. 5, поскольку его полярность соответствует полярности усиленного циклического входного сигнала. Однако по сравнению с циклическим входным сигналом можно увидеть, что обе формы сигналов «V» и «V» имеют постоянную амплитуду на всем протяжении, независимо от экстремальных пиковых изменений, которые могут возникать во входном сигнале.
4, где выходной сигнал изменяется с состояния высокого уровня на состояние низкого уровня. Схема инвертора включает в себя транзистор 74, база которого соединена с соединением между последовательными резисторами 76 и 72, которые подключены между выходом компаратора 68 и землей. Инверторный транзистор 74 обеспечивает выходной сигнал на своем коллекторе, обозначенном буквой «V» и показанном на фиг. 5, поскольку его полярность соответствует полярности усиленного циклического входного сигнала. Однако по сравнению с циклическим входным сигналом можно увидеть, что обе формы сигналов «V» и «V» имеют постоянную амплитуду на всем протяжении, независимо от экстремальных пиковых изменений, которые могут возникать во входном сигнале.
Хотя вариант осуществления, описанный выше со ссылкой на фиг. 1, достаточно для обеспечения улучшений, отмеченных по отношению к известному уровню техники, было обнаружено, что в некоторых случаях может быть желательно обеспечить небольшой гистерезис в точках переключения сигнала о пороговом уровне на компараторе 68. Такой гистерезис вводится положительной обратной связью с выхода компаратора 68 на его отрицательный входной порт. Резистор 64 подключен между коллектором транзистора 74 и эмиттером NPN-транзистора 60, соединенного с диодом. Соединение база-коллектор транзистора 50 подключено к отрицательному входному порту компаратора 68. Эффект схемы гистерезиса заключается в понижении сигнала на отрицательном входном порту компаратора 68 примерно на 20 милливольт и требует, чтобы сигнал «Y» поднялся намного выше порогового уровня, прежде чем выходной сигнал компаратора 68 переключится. государства. Поскольку минимальный сигнал, ожидаемый в «Y», составляет не менее 20 милливольт, гистерезис соответствует максимуму только 10% этого сигнала. Было обнаружено, что эффект введения гистерезиса обеспечивает большую стабильность на скоростях останова и замедления вращения коленчатого вала, а также обеспечивает большую устойчивость к шуму.
Такой гистерезис вводится положительной обратной связью с выхода компаратора 68 на его отрицательный входной порт. Резистор 64 подключен между коллектором транзистора 74 и эмиттером NPN-транзистора 60, соединенного с диодом. Соединение база-коллектор транзистора 50 подключено к отрицательному входному порту компаратора 68. Эффект схемы гистерезиса заключается в понижении сигнала на отрицательном входном порту компаратора 68 примерно на 20 милливольт и требует, чтобы сигнал «Y» поднялся намного выше порогового уровня, прежде чем выходной сигнал компаратора 68 переключится. государства. Поскольку минимальный сигнал, ожидаемый в «Y», составляет не менее 20 милливольт, гистерезис соответствует максимуму только 10% этого сигнала. Было обнаружено, что эффект введения гистерезиса обеспечивает большую стабильность на скоростях останова и замедления вращения коленчатого вала, а также обеспечивает большую устойчивость к шуму.
Очевидно, что многие модификации и вариации могут быть осуществлены без выхода за пределы объема новой концепции настоящего изобретения. Следовательно, прилагаемая формула изобретения предназначена для охвата всех таких модификаций и вариаций, которые попадают в истинную сущность и объем изобретения.
Следовательно, прилагаемая формула изобретения предназначена для охвата всех таких модификаций и вариаций, которые попадают в истинную сущность и объем изобретения.
Сигналы коленчатого и распределительного валов
Ключом к диагностике многих проблем с запуском, отсутствием запуска и остановкой двигателя, обнаруженных на импортных моделях последних моделей, является понимание того, как работают датчики положения коленчатого и распределительного валов и какова их механическая связь друг с другом. За последние 30 лет системы управления зажиганием эволюционировали от распределителя к безраспределителю и к системам зажигания с катушкой на свече. Точно так же системы впрыска топлива эволюционировали от карбюраторных до дроссельных, от многоточечных «наклонных» до последовательных многоточечных систем. Совершенно очевидно, что как никогда важно понимать, как работают датчики коленвала и распредвала в каждой из этих систем.
Возвращаясь к основам, двигателю с циклом Отто требуется два оборота для завершения одного цикла сгорания. Первый оборот цикла сгорания состоит из тактов впуска и сжатия. Второй оборот состоит из рабочего и выпускного тактов. Назначение датчиков коленчатого вала (CKP) и положения распределительного вала (CMP) состоит в том, чтобы определить, находится ли коленчатый вал на первом или втором обороте цикла сгорания, а также определить, какой ход происходит в каждом цилиндре.
Первый оборот цикла сгорания состоит из тактов впуска и сжатия. Второй оборот состоит из рабочего и выпускного тактов. Назначение датчиков коленчатого вала (CKP) и положения распределительного вала (CMP) состоит в том, чтобы определить, находится ли коленчатый вал на первом или втором обороте цикла сгорания, а также определить, какой ход происходит в каждом цилиндре.
СОВРЕМЕННЫЕ СИСТЕМЫ ВПРЫСКА ТОПЛИВА
Функция распределителя на двигателях с инжекторным впрыском топлива заключается в определении момента достижения каждым цилиндром верхней мертвой точки (ВМТ) на такте сжатия. Когда цилиндр достигает ВМТ, распределитель запускает катушку зажигания, чтобы обеспечить искру смеси сжатого воздуха и топлива.
Проблема определения ВМТ такта сжатия усложняется при многоточечном электронном впрыске топлива. В ранних многоточечных системах использовалась система впрыска топлива с «наклоном», в которой половина топливных форсунок активировалась при каждом обороте двигателя. Очевидно, что системы распределенного впрыска были относительно неэффективны и от них отказались, когда компьютеры двигателей стали достаточно сложными, чтобы последовательно синхронизировать цикл впрыска топлива в соответствии с порядком работы цилиндров.
Очевидно, что системы распределенного впрыска были относительно неэффективны и от них отказались, когда компьютеры двигателей стали достаточно сложными, чтобы последовательно синхронизировать цикл впрыска топлива в соответствии с порядком работы цилиндров.
В некоторых ранних системах для определения ВМТ каждого цилиндра использовался только датчик положения коленчатого вала. По сути, модуль управления двигателем (ECM) на четырехцилиндровом двигателе может, например, измерять частоту вращения коленчатого вала, переключая момент впрыска топлива на 180 градусов вращения коленчатого вала, пока не «найдет» такт сжатия ВМТ. Напротив, системы последовательного впрыска должны включать датчик положения распределительного вала для определения ВМТ такта сжатия каждого цилиндра во время первых двух оборотов коленчатого вала.
СОВРЕМЕННЫЕ СИСТЕМЫ ЗАЖИГАНИЯ
Точно так же современные системы зажигания эволюционировали от распределителя к бесраспределителю, к системам с катушкой на свече. Ранние электронные импортные системы впрыска топлива включали датчики CMP и CKP в распределитель, что позволяло распределителю синхронизировать события зажигания и впрыска топлива. С появлением зажигания без распределителя, при котором искра подавалась к парам цилиндров, вращающихся в такте выпуска и сжатия, функция CKP превратилась в синхронизацию события зажигания, а CMP превратилась в синхронизацию события впрыска топлива. Эта основная функция сохранилась и в более поздних системах зажигания с катушкой на свече.
Ранние электронные импортные системы впрыска топлива включали датчики CMP и CKP в распределитель, что позволяло распределителю синхронизировать события зажигания и впрыска топлива. С появлением зажигания без распределителя, при котором искра подавалась к парам цилиндров, вращающихся в такте выпуска и сжатия, функция CKP превратилась в синхронизацию события зажигания, а CMP превратилась в синхронизацию события впрыска топлива. Эта основная функция сохранилась и в более поздних системах зажигания с катушкой на свече.
Как в системе зажигания без распределителя, так и в системе зажигания COP, CKP установлен на коленчатом валу, а CMP — на распределительном валу. Эта конфигурация позволяет CMP контролировать положение распределительного вала, а CKP контролировать частоту вращения коленчатого вала, положение поршня и величину отклонения коленчатого вала или изменения скорости, возникающие во время пропуска зажигания в цилиндре.
Фото 1 ДАТЧИКИ CMP И CKP РЕЛЮКТОРНОГО ТИПА
В самом общем смысле двухпроводной релюкторный датчик или датчик «переменного тока» состоит из медного провода, намотанного на магнит. Магнит помещается рядом с вращающимся рефлектором, имеющим выступы или «зубья», которые генерируют напряжение в обмотках датчика, когда релюктор вращается вокруг датчика.
Магнит помещается рядом с вращающимся рефлектором, имеющим выступы или «зубья», которые генерируют напряжение в обмотках датчика, когда релюктор вращается вокруг датчика.
Показано на фото 1 . представляет собой типичную форму сигнала переменного сопротивления, генерируемого распределителем. По мере того, как рефлектор ускоряется, напряжение увеличивается примерно с четырех вольт до примерно шести вольт. Обратите внимание, что датчик выдает положительное и отрицательное напряжение, которое пересекает «нулевую» линию под углом.
Фото 2 ДАТЧИКИ CMP И CKP НА ЭФФЕКТЕ ХОЛЛА
Как показано на Фото 2 , датчик Холла формирует сигнал прямоугольной формы. Прямоугольная форма сигнала более точно умножает искру, потому что нарастание и падение напряжения происходит перпендикулярно, а не под углом.
В отличие от двухпроводного датчика с переменным магнитным сопротивлением, который генерирует собственное напряжение, трехпроводному датчику на эффекте Холла для генерации сигнала требуется внешний источник напряжения. По сути, датчик Холла представляет собой электрический переключатель, который использует колесо затвора, вращающееся через воздушный зазор, для включения и выключения тока, протекающего через датчик. Поскольку выходное напряжение либо положительное, либо нулевое, датчик на эффекте Холла является более точным датчиком, чем переменный рефлекторный тип, который выдает переменное значение напряжения.
По сути, датчик Холла представляет собой электрический переключатель, который использует колесо затвора, вращающееся через воздушный зазор, для включения и выключения тока, протекающего через датчик. Поскольку выходное напряжение либо положительное, либо нулевое, датчик на эффекте Холла является более точным датчиком, чем переменный рефлекторный тип, который выдает переменное значение напряжения.
При использовании в приложениях положения коленчатого вала оба датчика указывают такт сжатия в цилиндре номер один с помощью «сигнатурной» или «синхронной» формы волны, которая создается путем изменения размера или формы зуба заслонки или редуктора. В приложениях, которые включают внешний модуль зажигания, сигнал CKP указывает положение коленчатого вала для PCM.
При обслуживании датчиков распредвала важно различать датчик положения распредвала и датчик синхронизации распредвала. Имейте в виду, что более поздние импортные модели, такие как Nissan, могут также включать датчик синхронизации распределительного вала для отслеживания изменений в синхронизации распределительного вала. Важно не перепутать расположение и функцию этих двух датчиков во время замены датчика.
Важно не перепутать расположение и функцию этих двух датчиков во время замены датчика.
ДИАГНОСТИКА ПЕРЕМЕННОГО РЕЛЮКТОРА
При рассмотрении Фото 1 становится ясно, что положительное и отрицательное распределение напряжения и продолжительность не равны. Датчики рефлекторного типа очень чувствительны к силе их магнитов, воздушному зазору между датчиком и релюктором, а также к скорости вращения самого релюктора. Из-за этих факторов цифровой запоминающий осциллограф (DSO) обеспечит наиболее точное измерение выходного напряжения с переменным сопротивлением.
ДИАГНОСТИКА НА ЭФФЕКТЕ ХОЛЛА
Поскольку датчик на эффекте Холла должен выдавать четкий прямоугольный сигнал правильной амплитуды, а форма сигнала отключается или снижается до нулевого напряжения, необходимо использовать лабораторный эндоскоп для диагностики датчиков на эффекте Холла. Если форма сигнала не снижается до почти нулевого напряжения, PCM может быть не в состоянии «прочитать» сигнал от датчика Холла.
Что касается «уникальных» форм сигналов, таких как те, которые встречаются в некоторых системах зажигания Ford, имейте в виду, что отклонения от идеальной прямоугольной формы сигнала могут быть уникальными для конкретного производителя, а не неисправностью самого датчика.
Нижняя кривая представляет собой сигнал на эффекте Холла, генерируемый зажиганием распределителя, а верхняя кривая представляет собой обратный сигнал от PCM.
Фото 3В Фото 3 верхняя кривая представляет собой синхронизирующий сигнал, генерируемый PCM. «Синхронизирующий» сигнал представляет собой узкий импульс в крайнем правом углу сигнала срабатывания распределителя. Обратите также внимание на то, что сигнал от распределителя не понижается до нулевого напряжения. В крайнем правом углу обратного сигнала вы увидите, что PCM больше не подает действительный сигнал эффекта Холла на модуль зажигания.
Фото 4 Как видно из Фото 4 , обратный сигнал от блока управления двигателем не может снизить напряжение до нуля, что приводит к запуску двигателя без искры.