
Как правильно поворачивать на автомобиле, техника выполнения поворотов — Autodromo
Больше всего сложностей у водителей-новичков, наряду с обгоном и парковкой, вызывает выполнение поворотов, а ведь именно поворот является одним из важных элементов управления автомобилем.
Практически любой, совершаемый маневр автомобилем на дороге, может являться поворотом (с определенной долей натяжки, конечно). Именно поэтому так важно научиться поворачивать на автомобиле во время движения.
Правильный поворот должен быть точным, быстрым, безопасным и выполняться по всем правилам.
Содержание
Техника выполнения поворота
Прежде чем приступить к освоению техники поворота, следует знать о том, что любой поворот выполняется в четыре приема:
- Движение по прямой – приближение к повороту;
- Вхождение в поворот, сопровождается поворачиванием руля;
- Движение в повороте;
- Выход из поворота, сопровождается установкой руля в исходное положение.


Далее любое движение на автомобиле происходит прямолинейно до следующего поворота. Для того чтобы выполнить безопасный поворот, важно учитывать основные факторы, влияющие на данный процесс – рабочий режим двигателя, скорость и траекторию движения в повороте.
Траектория движения в повороте
При проведении любого поворота важно учитывать траекторию движения автомобиля в дуге поворота. Траектория движения выполняется строго по правилам на полосе движения без дополнительных манипуляций рулем.
Таким образом, при вхождении в поворот, выкручиваем руль в сторону поворота, проходим по дуге, возвращаем руль в исходное положение и продолжаем прямолинейное движение.
Скорость движения в повороте
Вхождение в поворот должно происходить на сниженной скорости. Перед любым поворотом (именно перед поворотом, а не во время поворота) следует сбросить скорость, а по дуге продолжать движение уже на постоянной скорости.
Для безопасности водителя снижение скорости должно происходить на прямом участке дороги на приближении к повороту, для того чтобы избежать проскальзывания колес, торможения или заноса всего корпуса автомобиля.
Вкратце мы рассмотрели, что следует учитывать при приближении к повороту – это скорость и траектория движения. А сейчас более детально о действиях водителя при вхождении в поворот, движении в повороте и выходе из поворота.
Вхождение в поворот
Приближение и вхождение в поворот должно происходить на сниженной скорости. Скорость движения рассчитывается с учетом угла и радиуса поворота, а также состояния дороги. При неблагоприятных условиях, скорость движения должна быть гораздо ниже, чем в обычных условиях.
При вхождении в поворот следует учитывать еще два момента – точку фиксации внимания и положение рук на руле.
При выполнении поворота вы должны фиксировать свое внимание на том участке дороги, куда направляетесь. В перспективе, это должна быть точка выхода из поворота (если поворот не слишком крутой).
Таким образом, поворачивая руль при вхождении в поворот, взгляд должен быть устремлен на тот участок, где вы вернете руль в исходное положение. В идеале взгляд должен плавно скользить по всему участку движения вашего автомобиля, для того чтобы рассчитывать не только скорость движения, но и расстояние.
Если же точка выхода из поворота не просматривается, в таком случае преодоление дуги поворота должно проходить только на сниженной скорости.
Что касается положения рук на руле, здесь все просто. Перед вхождением в поворот необходимо переместить руки на участок руля, который находится в противоположной стороне от направления поворота. Наиболее оптимальным положением рук при левостороннем повороте является схема – 4/12, при правостороннем – 8/12.
Для пояснения схемы расположения рук представим, что руль разбит на отдельные участки и представляет собой циферблат. Первое значение – это участок, на котором располагается правая рука, второе значение – расположение левой руки. Таким образом, на цифре 4 находится правая рука, на цифре 12 – левая рука.
Важно помнить, что ладони необходимо всегда держать на руле, для изменения положения руки (или хвата) применяется тактика скольжения по рулю.
Движение в повороте
Двигаясь в дуге поворота, категорически запрещается резкое изменение скорости движения. Поэтому движение в повороте должно происходить исключительно на постоянной скорости.
Поэтому движение в повороте должно происходить исключительно на постоянной скорости.
Тормозить на дуге прохождения поворота можно только в экстренных случаях, когда, к примеру, водитель не может справиться с вождением на установленной скорости, что чревато заносом или вылетом автомобиля на обочину. В таких случаях торможение должно быть плавным и медленным.
Выход из поворота
Окончание движения по дуге поворота с выходом на прямой участок дороги сопровождается выравниванием руля и плавным набором скорости. При этом разгон должен происходить плавно для того чтобы избежать потери контроля над управлением транспортным средством и выездом на встречную полосу.
Резюмируя все вышесказанное можно представить полную схему осуществления любого поворота.
- При подъезде к повороту водитель плавно выжимает тормозную педаль, чтобы снизить скорость, при необходимости переключаясь на более низкую передачу.
- На входе в поворот водитель определяет траекторию и полосу движения автомобиля.
 Поворот руля осуществляется двумя руками, которые находятся в положении, согласно схеме захвата. Взгляд фиксируется на точке выхода из поворота. Войдя на дугу, в повороте поддерживается постоянная скорость движения.
Поворот руля осуществляется двумя руками, которые находятся в положении, согласно схеме захвата. Взгляд фиксируется на точке выхода из поворота. Войдя на дугу, в повороте поддерживается постоянная скорость движения. - При выходе из поворота водитель возвращает руль в исходное положение и начинает плавно увеличивать скорость движения. При прямолинейном движении происходит полный разгон скорости с переключением на высокую передачу.
На самом деле, немного потренировавшись, все новички довольно быстро осваивают технику прохождения поворотов и вскоре начинают чувствовать некоторую самоуверенность, переоценивая свое водительское мастерство, позволяя себе определенные вольности.
Как вы понимаете, это чревато неприятными последствиями. Дорога ошибок не прощает, поэтому очень важно, особенно для новичков, держать себя в руках и помнить о правилах прохождения поворотов.
Со временем, набравшись опыта, вы уже не будете задумываться о том, как держать руль, с какой скоростью двигаться, когда жать на педаль и так далее, все это будет происходить автоматически на уровне чувств.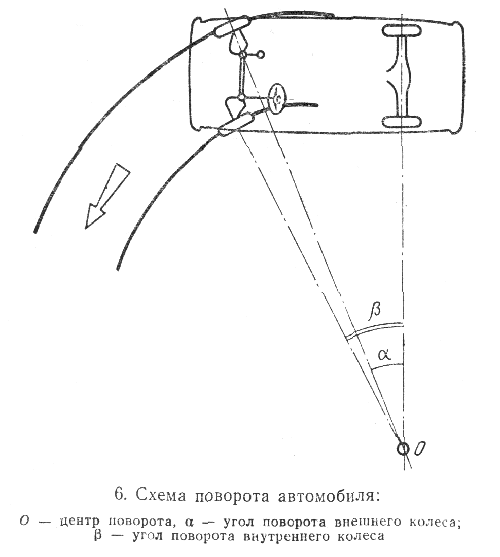 Главное в этом, выработать на стадии обучения правильную технику прохождения поворотов, чтобы в будущем ездить безопасно.
Главное в этом, выработать на стадии обучения правильную технику прохождения поворотов, чтобы в будущем ездить безопасно.
Во второй части видео-ролика идет реклама Мерседеса, но про поворот рассказывается неплохо:
Геометрия поворота / Этюды // Математические этюды
Геометрия поворота / Этюды // Математические этюдыМатематические этюды
К списку
Параллельны ли друг другу передние колёса автомобиля при повороте?
Оказывается, что именно геометрия и механика определяют то, как надо поворачивать колёса автомобиля.
Если продолжение оси колёс направлено в центр поворота, то колесо оставляет чёткий след. Чёткая картинка будет, и если несколько осей направлены в центр поворота.
Однако, если продолжение оси колеса направлено не в центр поворота, то колесо катится с проскальзыванием..jpg) След будет стёртым, а самое главное, управляемость
транспорта с таким колесом будет тем хуже, чем выше скорость. Итак, для хорошей управляемости продолжения осей колес должны быть направлены в центр поворота.
Что же это значит для четырёхколёсного автомобиля?
След будет стёртым, а самое главное, управляемость
транспорта с таким колесом будет тем хуже, чем выше скорость. Итак, для хорошей управляемости продолжения осей колес должны быть направлены в центр поворота.
Что же это значит для четырёхколёсного автомобиля?
Научимся для начала проходить простой поворот — дугу окружности.
Так как задние колёса в большинстве машин не поворачиваются, то центр окружности поворота должен лежать на продолжении оси этих колёс. Передние колёса необходимо повернуть так, чтобы продолжение оси каждого колеса смотрело в этот же центр. А значит, для хорошей управляемости передние колёса необходимо поворачивать на разные углы, и они будут непараллельны!
Вы скажете, что повороты не всегда являются дугой какой-либо окружности, и уж тем более машина не останавливается для того, чтобы повернуть колёса.
Это, конечно, правда, но оказывается, что при любом повороте в каждый момент времени можно считать, что машина едет по дуге некоторой окружности
(радиус и центр которой зависят от момента времени).
Рассмотрим произвольную дорогу. Чтобы по ней можно было ездить, у неё не должно быть острых углов, т.е. средняя линия будет, как говорят в математике, гладкой кривой.
Зафиксируем синюю точку на средней линии и подумаем, каким более простым геометрическим объектом можно заменить кривую в небольшой окрестности нашей точки.
Возьмём произвольную красную точку недалеко от синей. Две точки на плоскости определяют единственную прямую, которую и проведём. Будем двигать красную точку по кривой к синей. В момент, когда они совпадут, прямая, ими определяемая, будет касательной прямой. Она даёт линейное приближение кривой дороги в небольшой окрестности зафиксированной точки. Однако при увеличении видно, что дорога и касательная прямая рядом идут на очень маленьком участке.
Справа и слева от синей точки возьмём по красной. Три точки, не лежащие на одной прямой, определяют единственную окружность, которую и проведём.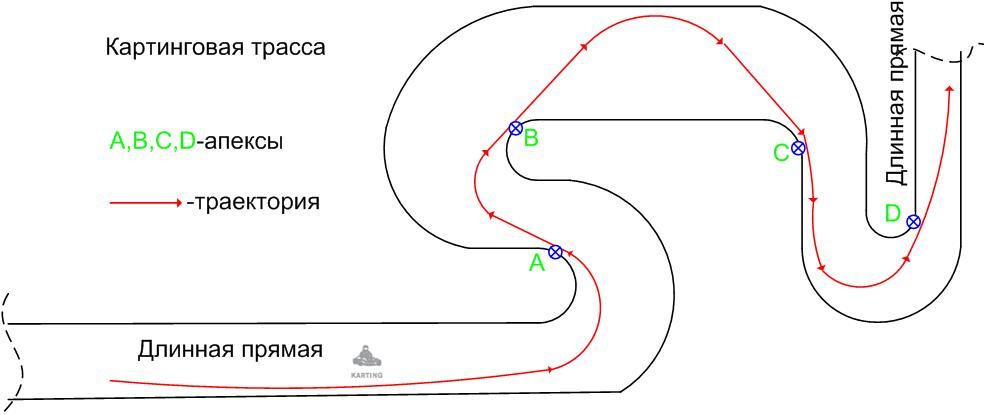
Так как соприкасающаяся окружность для нашей задачи хорошо приближает дорогу и может быть построена в любой её точке, то движение по изгибам дороги можно рассматривать в каждый момент времени как движение по дуге некоторой окружности. Мгновенные радиус и центр этой окружности зависят, конечно, от той точки, в которой находится машина.
Таким образом, при движении в произвольном повороте можно считать, что в каждый момент времени машина движется по небольшой дуге некоторой окружности.
Но как достичь того, чтобы при любом повороте колёс продолжение осей смотрело в мгновенный центр поворота?
Оказывается, и здесь на помощь приходит геометрия, а именно известная со школы равнобокая трапеция — четырёхугольник, у которого две стороны, называемые основаниями, параллельны между собой, а боковые стороны равны друг другу. Если правильно подобрать размеры сторон трапеции, то достигается небоходимое для хорошего управления условие — продолжение осей передних колёс пересекается в точке, лежащей на продолжении оси задних колёс. Эта точка и есть мгновенный центр поворота машины.
Придумал такое управление передними колёсами француз, каретных дел мастер Шарль Жанто (Charles Jeantand). Однако для карет, передвигавшихся с малыми скоростями,
это было не так существенно, как для машин, и изобретение Жанто было забыто.
С точки зрения строгой математики, трапеция не позволяет достичь необходимого условия — чтобы продолжение осей передних колес при любом повороте пересекалось
в точке, лежащей на продолжении задней оси. При использовании трапеции эта точка будет всегда лежать чуть-чуть в стороне от линии задней оси. Зачем же мы столько
обсуждали трапецию, скажете вы? Расстраиваться рано — просто не надо бездумно переносить математическую строгость в технические вопросы. Чтобы точка
пересечения линий передних осей всегда лежала на линии задней оси, необходимо, чтобы длина меньшего основания трапеции немного менялась.
При общей длине этого основания более метра необходимые изменения длины составляют всего около одного сантиметра, а это меньше чем люфты в соединениях
и разрешённые допуски при изготовлении.
Зачем же мы столько
обсуждали трапецию, скажете вы? Расстраиваться рано — просто не надо бездумно переносить математическую строгость в технические вопросы. Чтобы точка
пересечения линий передних осей всегда лежала на линии задней оси, необходимо, чтобы длина меньшего основания трапеции немного менялась.
При общей длине этого основания более метра необходимые изменения длины составляют всего около одного сантиметра, а это меньше чем люфты в соединениях
и разрешённые допуски при изготовлении.
Со времён изобретения первых автомобилей скорости передвижения сильно возросли. Увеличились и требования к управлению передними колёсами.
Кроме того, трапеция — это плоская геометрическая фигура. И такой способ управления передними колёсами может использоваться только при зависимой
передней подвеске — когда колёса жёстко связаны друг с другом и прямая, соединяющая их центры, всегда параллельна плоскости трапеции. Сейчас такое можно встретить на грузовых автомобилях. На современных легковых автомобилях подвеска колёс независима, т.е. они могут ходить
по высоте друг относительно друга. Для управления в повороте такими колёсами применяются более сложные, уже неплоские шарнирные механизмы,
чаще всего с центральным звеном в виде рулевой рейки. Но их расчёт — это тоже задача математиков и механиков.
А исторически они так по-прежнему и называются — рулевой трапецией.
Сейчас такое можно встретить на грузовых автомобилях. На современных легковых автомобилях подвеска колёс независима, т.е. они могут ходить
по высоте друг относительно друга. Для управления в повороте такими колёсами применяются более сложные, уже неплоские шарнирные механизмы,
чаще всего с центральным звеном в виде рулевой рейки. Но их расчёт — это тоже задача математиков и механиков.
А исторически они так по-прежнему и называются — рулевой трапецией.
При повороте автомобиля возникает ещё один вопрос, связанный с геометрией. Длина окружности радиуса R равна, как вы помните, 2πR. Соответственно,
длина дуги, опирающейся на угол α окружности радиуса R, равна αR. При повороте автомобиля по дуге окружности внешнее переднее колесо едет по дуге
окружности большего радиуса, чем внутреннее переднее. Точно так же и заднее внешнее колесо описывает дугу большего радиуса, чем внутреннее заднее. А раз радиусы различаются, то, значит, пути, проходимые внутренним и внешним колёсами одной оси, должны быть тоже различны.
В противном случае колесо будет проскальзывать, и управляемость автомобиля снизится.
А раз радиусы различаются, то, значит, пути, проходимые внутренним и внешним колёсами одной оси, должны быть тоже различны.
В противном случае колесо будет проскальзывать, и управляемость автомобиля снизится.
В случае, когда ось неведущая, т.е. её колёса не толкают автомобиль вперёд, всё просто: каждое колесо вертится со своей скоростью, необходимой для прохождения нужного пути без проскальзывания.
А как же сделать так, чтобы колёса ведущей оси, в нашем случае задней, с одной стороны, постоянно толкали автомобиль вперёд, а с другой стороны, могли вращаться с разными скоростями?
Помогает в этом дифференциал — представитель планетарных механизмов. Планетарным называется механизм, у которого есть сателлиты — шестерни, крутящиеся вокруг подвижных осей.
Вал от мотора, пройдя через коробку передач, отдаёт вращение на «бочку». Бочка же через сателлиты передаёт вращение на левую и правую полуоси ведущей оси. Как бы ни вращались колёса, скорость бочки всегда в два раза медленнее вращения вала, а сумма скоростей полуосей равна удвоенной скорости вала.
Как бы ни вращались колёса, скорость бочки всегда в два раза медленнее вращения вала, а сумма скоростей полуосей равна удвоенной скорости вала.
Если машина едет по прямой и под обоими ведущими колёсами одинаковое покрытие — с одинаковым коэффициентом трения, то колёса забирают от бочки одинаковое количество вращения, и полуоси вращаются (колёса и их полуоси) с одинаковой скоростью.
Но если коэффициенты трения различаются, например, одна сторона машины выезжает с асфальта на грунтовую обочину или попадает на лёд, то… Как же будут себя вести колёса при прохождении этого участка? У колёс неведущей оси всё просто: они независимы друг от друга, им не надо толкать машину, и когда одно из них выкатывается на лёд, то перестаёт крутиться, так как трение с дорогой очень маленькое.
Вот и под левое колесо ведущей оси попадает лёд. Справа трение с асфальтом большое, а слева — со льдом — почти отсутствует.
Казалось бы, одни неудобства от этого дифференциала, зачем он тогда нужен? Как раз для решения задачи одновременного толкания ведущей осью машины вперёд и прохождения в поворотах ведущими колесами путей разной длины. Каждое колесо берёт от дифференциала количество движения пропорционально длине его пути, а в сумме всю энергию вала они затрачивают на движение машины вперёд.
Инженеры постоянно пытаются улучшить дифференциал, сохранив его основное свойство, пытаются уменьшить неприятные эффекты — каким-либо способом не давать
крутиться полуосям со слишком большой разницей скоростей. Но по сути, всё и сегодня остаётся таким же, ибо законы геометрии никто не отменял.
Но по сути, всё и сегодня остаётся таким же, ибо законы геометрии никто не отменял.
Смотри также
Поворот передних колёс автомобиля // Математическая составляющая / Ред.-сост. Н. Н. Андреев, С. П. Коновалов, Н. М. Панюнин. — Второе издание, расширенное и дополненное. — М. : Математические этюды, 2019. — С. 54—55, 306.
Млодзеевский Б. К. К теории управления в автомобилях // Вестник инженеров. 1917. 15 января. Т. 3, № 2. С. 37—41.
Другие этюды раздела «Математика и техника»
Колёсная пара Уголковый отражатель Глубина заложенияМатематические этюды
Passenger Tuptempting — размеры 180 ° и чертежи
макеты>
Троки поворота транспортных средств Путь поворота 180 ° для пассажирского транспортного средства измеряет минимальный радиус поворота для использования при разработке пространств для U -разворотов или разворотов на улицах, парковках, остановках или в зонах обслуживания. Для траекторий поворота можно использовать измерения от бордюра до бордюра или от стены до стены в зависимости от того, рассчитываются ли окружности поворота на основе внешней шины или внешнего переднего свеса. По возможности следует предусмотреть дополнительные зазоры для размещения автомобилей разных размеров и способностей водителей.
Для траекторий поворота можно использовать измерения от бордюра до бордюра или от стены до стены в зависимости от того, рассчитываются ли окружности поворота на основе внешней шины или внешнего переднего свеса. По возможности следует предусмотреть дополнительные зазоры для размещения автомобилей разных размеров и способностей водителей.
При измерении внутреннего и внешнего радиусов поворота на 180° минимальный внутренний радиус 14 футов 5 дюймов (4,39 м) и минимальный внешний радиус 24 фута-25 футов 6 дюймов (7,31-7,77 м) должны быть обеспечены по всему периметру. повернуть.
Траектория поворота пассажирского транспортного средства на 180° измеряет минимально возможный радиус поворота для использования при проектировании мест для разворотов или разворотов на улицах, автостоянках, съездах или в зонах обслуживания. На поворотных дорожках можно использовать либо бордюр-к-бордюру или измерения от стены до стены в зависимости от того, рассчитывается ли радиус поворота на основе внешней шины или внешнего переднего свеса.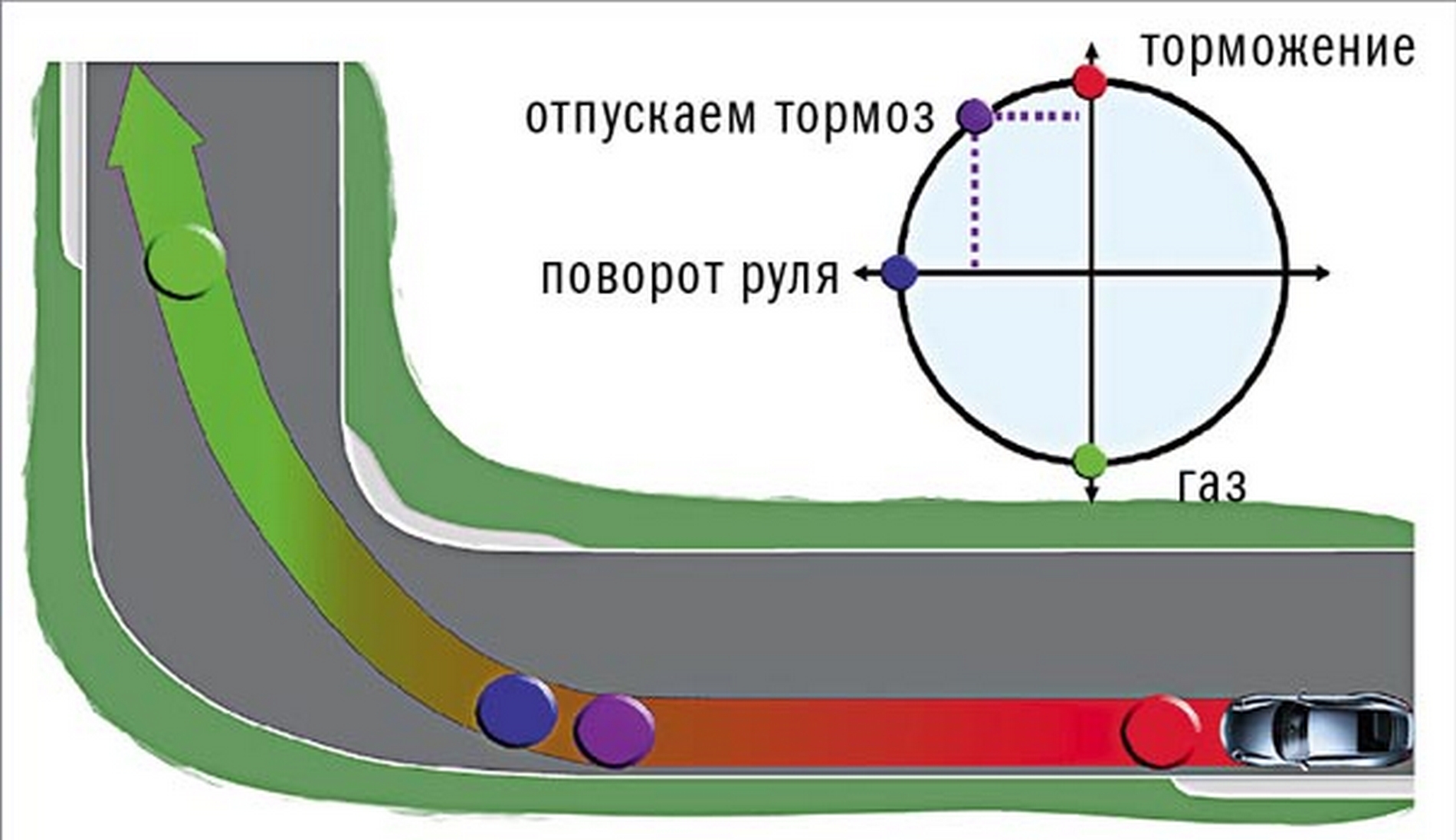 По возможности следует предусмотреть дополнительные зазоры для размещения автомобилей разных размеров и способностей водителей.
По возможности следует предусмотреть дополнительные зазоры для размещения автомобилей разных размеров и способностей водителей.
При измерении внутреннего и внешнего радиусов поворота на 180° минимальный внутренний радиус 14 футов 5 дюймов (4,39 м) и минимальный внешний радиус 24 фута — 25 футов 6 дюймов (7,31 — 7,77 м) должны быть обеспечены на всем протяжении поворота. повернуть.
Какой минимальный внутренний радиус поворота требуется для пассажирского транспортного средства, совершающего поворот на 180°?
Минимальный внутренний радиус поворота 14 футов 5 дюймов | Для пассажирского транспортного средства, совершающего разворот на 180°, должно быть предусмотрено 4,39 м.
Какой минимальный внешний радиус поворота требуется для пассажирского транспортного средства, совершающего поворот на 180°?
Внешний радиус поворота, необходимый для пассажирского транспортного средства, совершающего поворот на 180°, должен составлять не менее 24’-25’6” | 7,31-7,77 м с учетом круговой траектории, проделанной передним свесом автомобиля. По возможности следует предусмотреть дополнительное пространство.
По возможности следует предусмотреть дополнительное пространство.
Насколько велик типичный пассажирский автомобиль?
Средний легковой автомобиль среднего размера, обычно седан, имеет общую длину 15 футов 10 дюймов | 4,83 м и шириной 6 футов | 1,83 м.
Обновление до ProRenew Pro*В разработке*
Высота:
Ширина:
Глубина:
Длина:
Вес:
Внешний радиус: 24’-25’6” | 7,31–7,77 м
Внутренний радиус: 14 футов 5 дюймов | 4,39 м
Колесная база автомобиля: 11’ | 3,35 м
Длина автомобиля: 19’ | 5,79 м
Ширина автомобиля: 7’ | 2,13 м
Свойства
Чертежи включают:
Траектория поворота легкового автомобиля 180° в плане
Похожие коллекции
Похожие теги
Поделиться
Text by
БрайанОбновлено
8 апреля 2020 г.
2D Загрузки
Для загрузки этого элемента в формате 2D перейдите на членство в Dimensions Pro. Доступно в форматах DWG (CAD, Imperial и Metric), SVG, JPG
Доступно в форматах DWG (CAD, Imperial и Metric), SVG, JPG
Для загрузки этого элемента в 2D продлите членство в Dimensions Pro. Доступно в форматах DWG (CAD, Imperial и Metric), SVG, JPG. Доступно в форматах 3DM (Rhino), OBJ (NURB), SKP (Sketchup)
Для загрузки этого элемента в формате 3D продлите членство в Dimensions Pro. Доступно в форматах 3DM (Rhino), OBJ (NURB), SKP (Sketchup)
Блокировщик рекламы
Наслаждаетесь бесплатными рисунками? Мы тоже!
Реклама помогает финансировать нашу работу.
Поддержите проект, отключив
или добавив блокировщик рекламы в белый список при просмотре Dimensions.Guide. Спасибо!
Траектория поворота пассажира — 90° Размеры и чертежи
Компоновки>
Траектории поворота транспортных средств Траектория поворота пассажирского транспортного средства на 90° измеряет минимально возможный радиус поворота, необходимый при проектировании парковки, погрузки и высадки.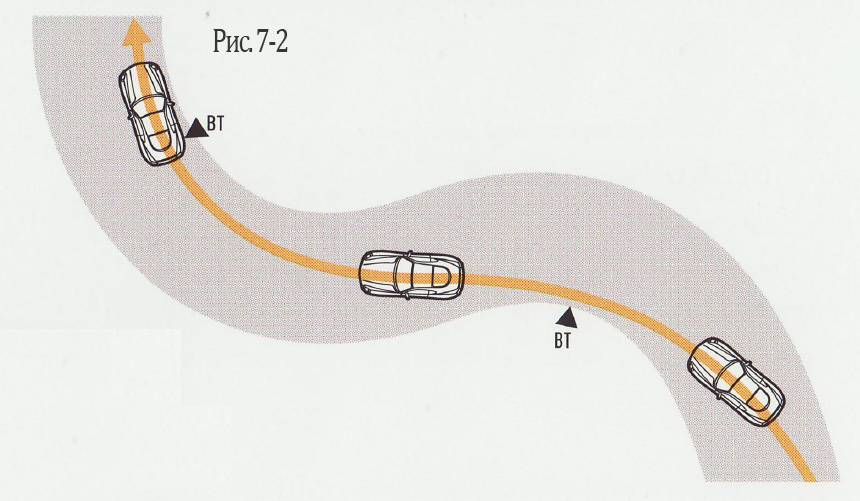 от пространств.
от пространств.
При измерении внутреннего и внешнего радиусов поворота на 90° необходимо обеспечить минимальный внутренний радиус 11 футов 6 дюймов (3,5 м) и минимальный внешний радиус 19 футов 2 дюйма (5,85 м). Несмотря на то, что для поворота требуется ширина всего 7 футов 6 дюймов (2,3 м), по возможности необходимо предусмотреть дополнительные зазоры, чтобы вместить большее разнообразие размеров автомобилей и способностей водителей.
Траектория поворота пассажирского транспортного средства на 90° измеряет минимально возможный радиус поворота, необходимый при проектировании парковочных, погрузочных и высадочных мест.
При измерении внутреннего и внешнего радиусов поворота на 90° необходимо обеспечить минимальный внутренний радиус 11 футов 6 дюймов (3,5 м) и минимальный внешний радиус 19 футов 2 дюйма (5,85 м). Несмотря на то, что для поворота требуется ширина всего 7 футов 6 дюймов (2,3 м), по возможности необходимо предусмотреть дополнительные зазоры, чтобы вместить большее разнообразие размеров автомобилей и способностей водителей.
Каков минимальный внутренний радиус поворота, необходимый для поворота на 90°?
Минимальный внутренний радиус поворота 11 футов 6 дюймов | 3,5 м должно быть предусмотрено для пассажирского транспортного средства, делающего 90° поворот.
Какова минимальная ширина пути для пассажирского транспортного средства, совершающего поворот на 90°?
Минимальная ширина пути поворота на 90° для легкового автомобиля составляет 7 футов 6 дюймов | 2,3 м исходя из переднего и заднего свесов типичного автомобиля.
Каков размер компактного автомобиля?
Под компактными автомобилями обычно понимаются автомобили с колесной базой менее 9 футов 2 дюймов (110 дюймов) | 2,8 м. Вместо измерения колесной базы сегодня термин компактный автомобиль относится к автомобилям с индексом внутреннего объема от 100 до 109.фут3 | 2,8-3,1 м3.
Обновление до ProRenew Pro*В разработке*
Высота:
Ширина:
Глубина:
Длина:
Вес:
Внешний радиус: 19’2” | 5,85 м
Внутренний радиус: 11’6” | 3,5 м
Ширина прохода: 7 футов 6 дюймов | не менее 2,3 м
Колесная база автомобиля: 8’10” | 2,7 м
Длина автомобиля: 15 футов 6 дюймов | 4,74 м
Ширина автомобиля: 5 футов 9 дюймов | 1,76 м
Свойства
Чертежи включают:
Пассажирский автомобиль, поворот на 90° План пути
Связанные коллекции
Связанные теги
Поделиться
Текст
Брайан 9000 3Обновлено
8 апреля 2020 г.