
Обслуживание РКПП
РКПП – роботизированная коробка переключения передач. Роботизированная коробка передач представляет собой обычную механическую трансмиссию, переключением передач в которой управляет робот – набор электронных блоков и датчиков.
Принцип работы РКПП ничем не отличается от принципа работы МКПП. Также она имеет аналогичную конструкцию, за исключением наличия в «роботе» специальных сервоприводов, которые называют актуаторами. Именно они позволяют автоматизировать смыкание сцепления и выбор конкретной передачи.
Электронный блок управления (ЭБУ) обрабатывает сигналы датчиков и других систем автомобиля: блока управления двигателем, тормозной и антизаносной/противопробуксовочной систем и т.д. — и приводит в действие актуаторы включения сцепления и переключения передач.
Плюсы роботизированной коробки передач:
• бюджетный вариант АКПП;
• сохранена надежность и конструктивность МКПП;
• минимизированы трудозатраты водителя для переключения передач;
• высокий процент передачи КПД в крутящем моменте.
Коробка робот изнашивает сцепление быстрее, чем водитель на механике. Примерно через 30 — 50 тыс.км пробега сцепление на автомобилях, оснащенных коробкой роботом, начинает проявлять признаки неисправности: коробка робот «буксует», появляется шум, не включается передача, автомобиль не едет как прежде.
Поэтому, необходимо провести техническое обслуживание при первых проявлениях неисправностей. При проведении технического обслуживания роботизированной коробки с помощью специализированного оборудования после тщательной диагностики производится программная адаптация сцепления и адаптация приводов роботизированной КПП. Иногда для восстановления работоспособности коробки робота достаточно выполнить прокачку сцепления и адаптацию сцепления (обучение момента трогания).
Своевременное обслуживание робота позволяет продлить срок службы комплекта сцепления РКПП, обеспечив пробег 60-70 тыс.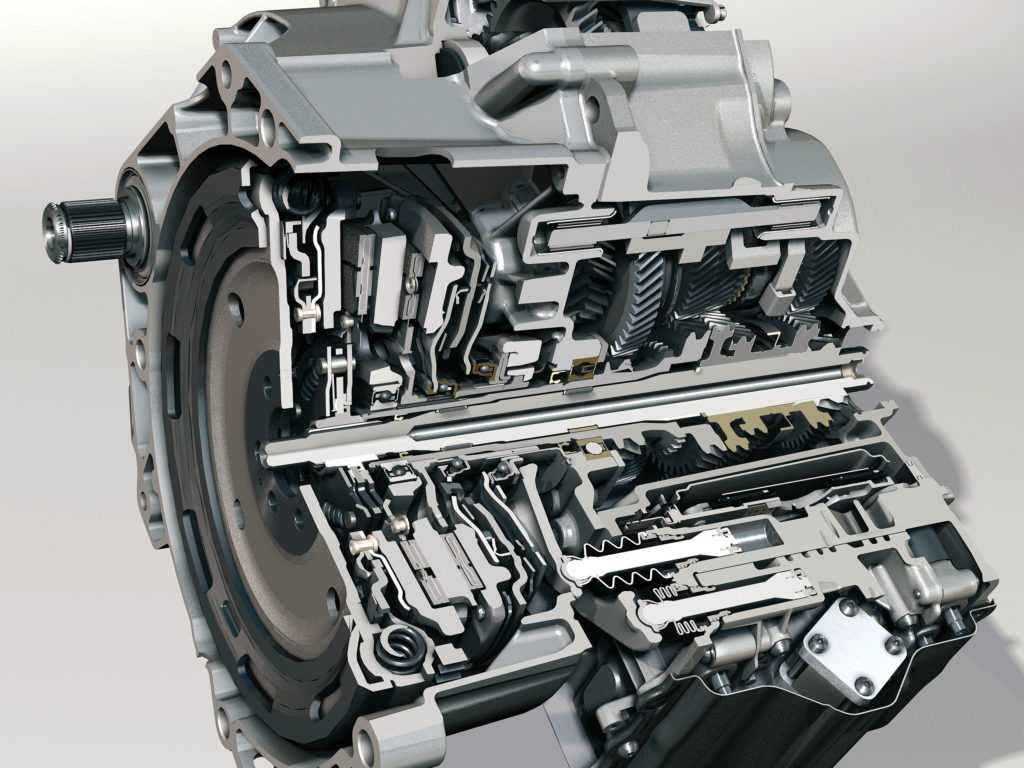 км и более. Чтобы роботизированная КПП служила долго, необходимо при техническом обслуживании через каждые 10-15 тыс.км проводить адаптацию алгоритма работы робота к степени износа диска сцепления.
км и более. Чтобы роботизированная КПП служила долго, необходимо при техническом обслуживании через каждые 10-15 тыс.км проводить адаптацию алгоритма работы робота к степени износа диска сцепления.
Ремонт и техническое обслуживание роботизированной коробки очень похож на ремонт МКПП. Если вам необходима замена сцепления на роботе — специалисты СТО «Элекар» быстро и качественно проведут ремонт коробки передач вашего автомобиля.
У нас есть весь комплекс инструментов, необходимых для технического обслуживания роботизированной КПП.
Быстро и качественно произвести диагностику и ремонт роботизированной коробки, техническое обслуживание РКПП в Витебске можно в автосервисе «Элекар». На все работы дается гарантия с предоставлением всех необходимых документов.
Статьи — Информация — AUTOSPACE.BY
Название «роботизированная коробка передач» свидетельствует о том, что водитель и условия движения формируют только входную информацию для системы управления, а работой коробки передач руководит электронный блок с определенным алгоритмом управления.
Роботизированная коробка передач сочетает в себе комфорт автоматической коробки передач, надежность и топливную экономичность механической коробки передач. При этом «робот» в большинстве своем значительно дешевле классической АКПП. В настоящее время практически все ведущие автопроизводители оснащают свои автомобили роботизированными коробками передач, устанавливая их на всю линейку моделей от малого до премиум класса.
Устройство роботизированной коробки передач
Роботизированные коробки передач различаются по конструкции, вместе с тем, можно выделить следующее общее устройство роботизированной коробки передач:
- сцепление;
- механическая коробка передач;
- привод сцепления и передач;
- система управления.
В автоматизированных коробках передач используется сцепление фрикционного типа. Это может быть отдельный диск или пакет фрикционных дисков. Прогрессивным в конструкции коробки передач является т. н. двойное сцепление, которое обеспечивает передачу крутящего момента без разрыва потока мощности.
н. двойное сцепление, которое обеспечивает передачу крутящего момента без разрыва потока мощности.
В основу конструкции роботизированной коробки положена механическая коробка передач. При производстве используются, в основном, готовые технические решения. Например, автоматизированная коробка передач Speedshift от Mercedes-Benz построена на базе АКПП 7G-Tronic путем замены гидротрансформатора на фрикционное многодисковое сцепление. В основе коробки SMG от BMW лежит шестиступенчатая «механика», оборудованная электрогидравлическим приводом сцепления.
Коробки-роботы могут иметь электрический или гидравлический привод сцепления и передач. В электрическом приводе исполнительными органами являются сервомеханизмы (электродвигатель и механическая передача). Гидравлический привод осуществляется с помощью гидроцилиндров, которые управляются электромагнитными клапанами. Такой вид привода еще называют электрогидравлическим. В ряде конструкций «роботов» с электрическим приводом (Easytronic от Opel, Durashift EST от Ford) используется гидромеханический блок с электродвигателем для перемещения главного цилиндра привода сцепления.
Электрический привод отличает невысокая скорость работы (время переключения передач 0,3-0,5с) и меньшее энергопотребление. Гидравлический привод предполагает постоянное поддержание давления в системе, а значит большие затраты энергии. Но с другой стороны он более быстрый. Некоторые роботизированные коробки передач с гидравлическим приводом, устанавливаемые на спортивные автомобили, имеют просто впечатляющую скорость переключения передач: Ferrari 599GTO – 0,06c, Lamboghini Aventador – 0,05c.
Эти качества определяют область применения «роботов» с электрическим приводом на бюджетных автомобилях, с гидравлическим приводом – на более дорогих автомобилях. Электрический привод имеют следующие конструкции коробок передач:
- Allshift от Mitsubishi;
- Dualogicот Fiat;
- Durashift EST от Ford;
- Easytronicот Opel;
- MultiModeот Toyota;
- SensoDriveот Citroen;
- 2-Tronic от Peugeot.

Достаточно большое количество роботизированных коробок оснащены гидравлическим приводом:
- ISR (Independent Shifting Rods) от Lamborghini;
- Quickshiftот Renault;
- R-Tronic от Audi;
- Selespeedот Alfa Romeo;
- SMG от BMW.
Управление роботизированной коробкой передач осуществляет электронная система, которая включает входные датчики, электронный блок управления и исполнительные механизмы. Входные датчики отслеживают основные параметры коробки передач: частоту вращения на входе и выходе, положение вилок включения передач, положение селектора, а также давление и температуру масла (для гидравлического привода) и передают их в блок управления.
На основании сигналов датчиков электронный блок управления формирует управляющие воздействия на исполнительные механизмы в соответствии с заложенной программой. В своей работе электронный блок взаимодействует с системой управления двигателем, системой ABS (ESP).
Исполнительными механизмами роботизированной коробки передач в зависимости от вида привода являются электродвигатели (электрический привод), электромагнитные клапаны гидроцилиндров (гидравлический привод).
Коробка передач с двойным сцеплением
Основным недостатком роботизированной коробки передач является сравнительно большое время переключения передач, что приводит к рывкам и провалам в динамике автомобиля и, соответственно, снижает комфорт от управления транспортным средством. Решение указанной проблемы было найдено в применении коробки передач с двумя сцеплениями, обеспечившей переключение передач без разрыва потока мощности.
Двойное сцепление позволяет при включенной передаче выбрать следующую передачу и при необходимости включить ее без перерыва в работе коробки. Поэтому другое название роботизированной коробки передач с двумя сцеплениями – преселективная коробка передач (от preselect – предварительно выбрать).
Поэтому другое название роботизированной коробки передач с двумя сцеплениями – преселективная коробка передач (от preselect – предварительно выбрать).
Другим преимуществом коробки передач с двойным сцеплением является высокая скорость переключение передач, зависящая только от скорости переключения муфт (DSG от Volkswagen – 0,2c, DCT M Drivelogic от BMW – 0,1c). «Робот» с двумя сцеплениями отличает еще и компактность, что актуально для малолитражных автомобилей. Наряду с этим, можно отметить повышенное энергопотребление коробки (особенно с «мокрым» сцеплением). Сравнительно высокая скорость переключения передач в совокупности с непрерывной передачей крутящего момента позволяют добиться отменной разгонной динамики автомобиля и экономии топлива.
В настоящее время двойное сцепление применяется во многих роботизированных коробках передач:
- DCT M Drivelogic от BMW;
- DSG от Volkswagen;
- PDK от Porsche;
- Powershift от Ford, Volvo;
- Speedshift DCT от Mercedes-Benz;
- S-Tronic от Audi;
- TCT от Alfa Romeo;
- Twin Clutch SST от Mitsubishi.

Даже великолепная Ferrari 458 Italia оборудована Doppelkupplungsgetriebe (коробка передач с двойным сцеплением). Все перечисленные роботизированные коробки передач используют гидравлический привод сцепления и передач. И лишь одна коробка передач на сегодняшний день имеет электрический привод устройств, это EDC (Efficient Dual Clutch) от Renault (время переключения передач 0,29с).
Пионерами массового применения коробки передач с двумя сцеплениями являются Volkswagen и Audi, которые устанавливают роботизированную коробку передач DSG и S-Tronic на свои автомобили с 2003 года. Коробка S-Tronic является аналогом коробки DSG, но в отличие от нее устанавливается продольно оси на задне- и полноприводные автомобили.
На автоматизированной коробке DCT M Drivelogic в системе управления реализуется функция Drivelogic, которая предполагает одиннадцать программ переключения передач. Шесть программ выполняются в режиме ручного переключения, а пять являются автоматизированными программами переключения передач.
Принцип действия роботизированной коробки передач
Работа роботизированной коробки передач может осуществляться в двух режимах: автоматическом и полуавтоматическом. В автоматическом режиме электронный блок управления на основании сигналов входных датчиков реализует определенный алгоритм управления коробкой с помощью исполнительных механизмов.
На всех роботизированных коробках предусмотрен режим ручного (полуавтоматического) переключения передач, аналогичный функции Tiptronic АКПП. Работа в данном режиме позволяет последовательно переключать передачи с низшей на высшую и наоборот с помощью рычага селектора и (или) подрулевых переключателей. Поэтому в ряде источников информации роботизированная трансмиссия называется секвентальной коробкой передач
(от sequensum – последовательность).
Обзор оптимальной комбинации редуктора и промышленного робота
Вернуться к обзору
Какая коробка передач оптимальна для вашего робота? В этой статье мы перечислим большое количество различных (промышленных) роботов и привяжем их к оптимальной серии редукторов из программы Apex Dynamics. Мы объясняем, почему эта коробка передач хорошо подходит для этого типа робота.
Слово «робот» впервые использовал чешский писатель Карел Чапек в своей пьесе R.U.R., что означает «Универсальные роботы Россума». Это было написано в 1920 и происходит от чешского слова robota, что означает «работа» или «обязательный труд». В этом разделе мы будем иметь дело только с промышленными роботами, которые в основном используются в промышленности. КОБОТ, робот, который работает вместе с людьми, и роботы в хирургии, домашнем хозяйстве, общественном питании и т. д., например, не учитываются.
Для каждого типа робота мы рекомендуем тип редуктора от Apex Dynamics с его наиболее важными характеристиками.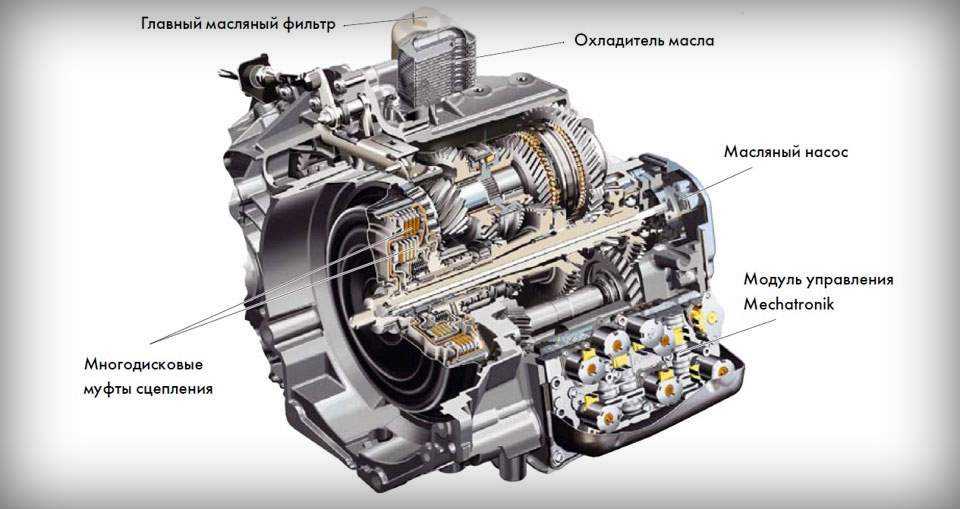 В этой статье мы обсудим следующих промышленных роботов:
В этой статье мы обсудим следующих промышленных роботов:
- Одиночный ремень или Н-образный мост
- Декартовский, декартовый, линейный или XYZ-робот
- Одиночная рука, шарнирная рука или роботизированная рука
- Дельта, параллельный или кинематический робот
- Машина с автоматическим управлением (AGV)
- Автономные мобильные роботы (AMR)
- Робот Скара
Редуктор для одноременного или Н-образного робота
Это 2-осевой портальный робот X/Z, состоящий из двойной направляющей в горизонтальной плоскости X и вертикальной оси Z. Ремень фиксируется и натягивается со стороны нагрузки. Все это приводится в движение вращающимся ремнем, который остается связанным несколькими точками отклонения. Движение осуществляется двумя моторами. Координата лежит по диагонали к точкам перегиба оси X и оси Z. С помощью этой системы вы можете перемещать небольшие массы и, следовательно, можно достичь более высоких ускорений.
Оптимальная коробка передач для робота с одним ремнем или Н-моста относится к серии PAII.
Благодаря малой инерции редуктора достигается высокая динамика, при этом люфт оказывает незначительное влияние на точность. Это довольно простое решение, и именно здесь на помощь приходит экономичная серия.
Редуктор для декартового, линейного или XYZ-робота
Декартовый робот — это промышленный робот, три основные оси управления которого являются линейными (т. е. они движутся в прямая линия, а не вращающаяся) и перпендикулярны друг другу. Три оси соответствуют движениям вверх-вниз, вперед-назад и влево-вправо. Помимо других преимуществ, это механическое устройство упрощает решение для рычага управления роботом. Обладает высокой надежностью и точностью при работе в трехмерном пространстве. Как роботизированная система координат, она также эффективна для горизонтальных перемещений и штабелирования контейнеров.
Стандартный декартовый робот имеет 3 оси.
Какой редуктор?
Оптимальный редуктор для декартового, линейного или XYZ-робота относится к серии AF.
Низкий люфт и высокая жесткость, чтобы справиться с более высокой инерцией массы, а также прочный подшипник для восприятия высокой возникающей радиальной нагрузки.
Редуктор для одной руки, шарнирной руки или руки робота
Рука робота представляет собой механический манипулятор с функциональностью, аналогичной руке человека. Манипулятор робота состоит из ряда сегментов, соединенных друг с другом шарнирами, между которыми возможны перемещения и/или вращения. Эти части вместе образуют кинематическую цепь. То, как части соединяются друг с другом и как они могут перемещаться между собой, определяет количество степеней свободы манипулятора робота.
На конце манипулятора находится инструмент, который позволяет роботу выполнять задачу, например захватывать или поворачивать что-либо. Отдельно стоящий робот с шарнирно-сочлененной рукой часто имеет 6 свободных осей, если его поместить на гусеницу, у него будет 7 осей.
Оптимальный редуктор для робота с одной рукой, шарнирной рукой или роботом-манипулятором относится к серии AH.
Высокая точность для точности и высоких крутящих моментов. Редуктор имеет выходной фланец для дополнительной жесткости.
Редуктор для треугольного, параллельного или кинематического робота
Дельта-робот — это 3-осевой робот, подходящий для небольших рабочих зон и быстрых операций. Валы соединены общим шарниром выше и ниже рычагов для поддержания мощности и скорости. Первый дельта-робот был изобретен в начале 1980-х профессором Раймоном Клавелем и его командой в Федеральной политехнической школе Лозанны (Швейцария). Стандартный робот Delta имеет 3 оси, при центральном вращении он становится 4-осевым.
T Оптимальный редуктор для треугольного, параллельного или кинематического робота относится к серии AP.
Чрезвычайно низкий люфт для предотвращения ошибок отслеживания, а также высокий крутящий момент и низкая инерция для высокодинамичных приводов.
Коробка передач для автоматически управляемого транспортного средства (AGV)
Автоматически управляемое транспортное средство — это мобильный робот, который использует маркеры, провода, магниты, лазер или другие инструменты для навигации. AGV часто используются в промышленности для перевозки материалов на заводе или складе. С конца 20 века AGV приобретают все большее значение в логистической отрасли.
Оптимальная коробка передач для автоматических транспортных средств (AGV) относится к серии PD/PL.
Поскольку это приложение не является сверхточным и имеет низкую динамику, достаточно средней точности. (Регулировка осуществляется с помощью маркеров) Большие подшипники могут воспринимать высокие радиальные нагрузки.
Коробка передач для автономных мобильных роботов (AMR)
Автономный мобильный робот — это тип робота, который способен понимать окружающую среду и перемещаться в ней самостоятельно. AMR отличаются от своих предшественников, автоматизированных управляемых транспортных средств (AGV), которые полагаются на гусеницы или заранее определенные пути и часто требуют наблюдения оператора.
AMR используют сложный набор датчиков, искусственный интеллект, компьютеры машинного обучения и планирования маршрута для интерпретации и навигации в окружающей среде, не полагаясь на проводное питание. Поскольку AMR оснащены камерами и датчиками, если они сталкиваются с неожиданным препятствием во время навигации, например, с упавшим ящиком или толпой людей, они будут использовать метод навигации, такой как предотвращение столкновений, чтобы замедлить, остановить или изменить маршрут вокруг объекта. а затем продолжить выполнение своей задачи.
Оптимальный редуктор для автономных мобильных роботов (AMR) относится к серии GL.
Поскольку точность должна быть выше, чем у AGV, мы выбрали серию GL из-за ее высокой точности, высоких радиальных нагрузок и компенсатора пускового момента. В результате отходящий шкив поворачивается в направлении, противоположном двигателю, и привод становится более управляемым.
Коробка передач для робота Scara
SCARA — это тип промышленного робота. Аббревиатура расшифровывается как Selective Compliance Assembly Robot Arm или Selective Compliance Articulated Robot Arm. Из-за параллельного направления оси SCARA рука слегка гибкая в направлении X-Y, но жесткая в направлении Z, отсюда и термин «селективное соответствие». Это выгодно для многих типов сборочных работ, например, для вставки круглого штифта в круглое отверстие без блокировки. Второй особенностью SCARA является шарнирное, двухшарнирное расположение рук, подобное человеческим рукам, отсюда и часто используемый термин «шарнирный». Это позволяет вытягивать руку в ограниченном пространстве, а затем втягивать или «складывать». Это удобно при перемещении деталей из одной ячейки в другую или при загрузке или разгрузке остановленных технологических станций.
Аббревиатура расшифровывается как Selective Compliance Assembly Robot Arm или Selective Compliance Articulated Robot Arm. Из-за параллельного направления оси SCARA рука слегка гибкая в направлении X-Y, но жесткая в направлении Z, отсюда и термин «селективное соответствие». Это выгодно для многих типов сборочных работ, например, для вставки круглого штифта в круглое отверстие без блокировки. Второй особенностью SCARA является шарнирное, двухшарнирное расположение рук, подобное человеческим рукам, отсюда и часто используемый термин «шарнирный». Это позволяет вытягивать руку в ограниченном пространстве, а затем втягивать или «складывать». Это удобно при перемещении деталей из одной ячейки в другую или при загрузке или разгрузке остановленных технологических станций.
SCARA, как правило, быстрее, чем сопоставимые декартовы роботизированные системы. Их одиночное крепление на пьедестал требует небольшой площади и обеспечивает простую и беспрепятственную форму монтажа. С другой стороны, SCARA могут быть более дорогими, чем сопоставимые декартовы системы, а управляющее программное обеспечение требует обратной кинематики для линейно интерполированных движений. Однако это программное обеспечение обычно входит в комплект поставки SCARA и обычно прозрачно для конечного пользователя.
Однако это программное обеспечение обычно входит в комплект поставки SCARA и обычно прозрачно для конечного пользователя.
Оптимальный редуктор для робота SCARA относится к серии AP.
Чрезвычайно малый люфт для точности, а также малая инерция для динамического контроля.
Этот обзор роботов, несомненно, неполный, а также существует множество подвариантов и экзотики. Однако должно быть ясно, что у Apex Dynamics всегда есть подходящее решение для 69 серий продуктов. Наши специалисты с удовольствием посоветуют вам подходящий редуктор для вашего применения. Не стесняйтесь связаться с нами.
Коробки передач — найти запчасти для роботов
Предложить изменение или новый товар
Коробки передач отлично подходят для снижения скорости и увеличения крутящего момента. Независимо от того, используется ли он для трансмиссии, коллектора или стрелкового робота, вы можете найти для своего робота подходящую коробку передач.