
Рулевое управление — презентация онлайн
Похожие презентации:
Грузоподъемные машины. (Лекция 4.1.2)
Зубчатые передачи
Гидравлический домкрат в быту
Детали машин и основы конструирования
Газораспределительный механизм
Свайные фундаменты. Классификация. (Лекция 6)
Ременные передачи
Редукторы
Техническая механика. Червячные передачи
Фрезерные станки. (Тема 6)
1. Рулевое управление
РУЛЕВОЕ УПРАВЛЕНИЕ2. Рулевое управление
РУЛЕВОЕ УПРАВЛЕНИЕ• Рулевое
управление
(далее
—
РУ)
—
Предназначается для обеспечения поворота
автомобиля
и
поддержания
заданного
направления движения.
Компоненты РУ
рулевой механизм,
рулевой привод
усилитель
Способы поворота
поворотом колес
поворотом осей
3. Классификация РУ
КЛАССИФИКАЦИЯ РУ4. Требования к РУ
ТРЕБОВАНИЯ К РУ• Основные требования к рулевым управлениям
связаны с обеспечением безопасности
дорожного движения.

• правильность кинематики поворота,
• легкость управления,
• силовое и кинематическое следящее действие,
• согласованность элементов рулевого
управления с подвеской для исключения
самопроизвольного поворота управляемых
колес,
• повышенная надежность, так как выход из строя
рулевого управления приводит к авариям с
тяжелыми последствиями.
5. Схема рулевого механизма (без усилителя)
СХЕМА РУЛЕВОГО МЕХАНИЗМА(БЕЗ УСИЛИТЕЛЯ)
1- рулевое колесо
2- рулевой вал
3- рулевая колонка
4-рулевой механизм
5- сошка рулевого механизма
6- продольная тяга
7- рычаг поворотной цапфы
8- поворотная цапфа
9- неподвижный шкворень
10- передняя ось
6. Поворот с помощью поворота управляемой оси
ПОВОРОТ С ПОМОЩЬЮ ПОВОРОТАУПРАВЛЯЕМОЙ ОСИ
• В качестве первого звена используется одноосная тележка, на
которой установлен двигатель и кабина водителя.
• Вторым звеном является полуприцеп.
• Между звеньями располагают гидравлические силовые цилиндры в
качестве управляющего механизма.

• Управление цилиндрами производят рулевым управляющим
органом машины.
• При повороте руля поршни и тяги перемещаются во взаимнопротивоположных направлениях.
• Звенья складываются относительно друг друга, и машина
поворачивается.
7. Радиусы поворота колесных машин
РАДИУСЫ ПОВОРОТА КОЛЕСНЫХМАШИН
8. Минимальный радиус поворота по оси следа управляемого внешнего колеса – это расстояние от центра поворота до оси следа
МИНИМАЛЬНЫЙ РАДИУС ПОВОРОТАПО ОСИ СЛЕДА УПРАВЛЯЕМОГО ВНЕШНЕГО КОЛЕСА – ЭТО РАССТОЯНИЕ ОТ ЦЕНТРА
ПОВОРОТА ДО ОСИ СЛЕДА УПРАВЛЯЕМОГО ВНЕШНЕГО КОЛЕСА ПРИ
МАКСИМАЛЬНЫХ УГЛАХ ПОВОРОТА УПРАВЛЯЕМЫХ КОЛЕС
• Rmin минимальный
радиус поворота по
оси следа
управляемого внешнего
колеса;
• Rг внешний габаритный
радиус;
• Rг внутренний
габаритный радиус;
• Bг габаритная полоса
движения.
• L – база автомобиля
• a максимальный угол
поворота управляемого
внешнего колеса
• В- максимальный угол
поворота
управляемого
внутреннего колеса
• b– расстояние от оси
шкворня до
вертикальной оси
колеса ( плечо обкатки
9.
 Минимальный радиус поворотаМИНИМАЛЬНЫЙ РАДИУС ПОВОРОТА
Минимальный радиус поворотаМИНИМАЛЬНЫЙ РАДИУС ПОВОРОТАL
R min
B
sin
• Габаритная полоса движения (Вг) – это
ширина участка дороги (местности), которую занимает
автомобиль в процессе поворота с минимальным
радиусом и ограниченная дугами, описываемыми
наиболее и наименее удаленными от центра поворота
точками.
BГ R R
II
Г
I
Г
10. Схемы ру
СХЕМЫ РУ17. Привод управляемых колес
ПРИВОД УПРАВЛЯЕМЫХ КОЛЕС18. Момент Сопротивления повороту колеса
МОМЕНТ СОПРОТИВЛЕНИЯПОВОРОТУ КОЛЕСА
19. Расчет момента сопротивления повороту колеса
РАСЧЕТ МОМЕНТА СОПРОТИВЛЕНИЯПОВОРОТУ КОЛЕСА
20. Расчет момента сопротивления повороту колеса
РАСЧЕТ МОМЕНТА СОПРОТИВЛЕНИЯПОВОРОТУ КОЛЕСА
21. КПД рулевого привода
КПД РУЛЕВОГО ПРИВОДА22. Жесткость рулевого привода
ЖЕСТКОСТЬ РУЛЕВОГО ПРИВОДА23. Жесткость рулевого привода
ЖЕСТКОСТЬ РУЛЕВОГО ПРИВОДА24.
 Типовые схемы рулевого приводаТИПОВЫЕ СХЕМЫ РУЛЕВОГО
Типовые схемы рулевого приводаТИПОВЫЕ СХЕМЫ РУЛЕВОГОПРИВОДА
26. Кинематический расчет рулевого привода
КИНЕМАТИЧЕСКИЙ РАСЧЕТРУЛЕВОГО ПРИВОДА
27. Кинематический расчет рулевого привода
КИНЕМАТИЧЕСКИЙ РАСЧЕТРУЛЕВОГО ПРИВОДА
28. Кинематический расчет рулевого привода
КИНЕМАТИЧЕСКИЙ РАСЧЕТРУЛЕВОГО ПРИВОДА
29. Кинематический расчет рулевого привода
КИНЕМАТИЧЕСКИЙ РАСЧЕТРУЛЕВОГО ПРИВОДА
30. Рулевой Привод многоосного автомобиля
РУЛЕВОЙ ПРИВОД МНОГООСНОГОАВТОМОБИЛЯ
• Рулевой привод многоосных
автомобилей требует более
сложных расчетов. При этом
используются
уравнения
котангенсов
• а также уравнения связи
31. Схема рулевого управления с усилителем
СХЕМА РУЛЕВОГО УПРАВЛЕНИЯ СУСИЛИТЕЛЕМ
/ — рулевое колесо;
2 — рулевая колонка;
3 — рулевой механизм;
4 — радиатор;
5 — насос
гидроусилителя руля;
6 — поворотный кулак;
7, 9 — поворотные рычаги;
8 — поперечная тяга;
10 — продольная тяга;
11 — сошка
32.
 Схемы рулевого управления с усилителемСХЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ С
Схемы рулевого управления с усилителемСХЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ СУСИЛИТЕЛЕМ
• Рулевой усилитель
предназначен для
облегчения
поворота и для
обеспечения
безопасности
движения
автомобиля.
34. Характеристики усилителей
ХАРАКТЕРИСТИКИ УСИЛИТЕЛЕЙ35. Схема рулевого управления с «ломающейся» рамой
СХЕМА РУЛЕВОГО УПРАВЛЕНИЯ С«ЛОМАЮЩЕЙСЯ» РАМОЙ
36. Шарниры рулевого привода
ШАРНИРЫ РУЛЕВОГО ПРИВОДАРазрез шарового шарнира тяги:
1 — шаровой палец;
2-грязезащитный колпачок;
3- корпус шарнира;
4 — вкладыш;
5 — пружина;
6 — заглушка.
English Русский Правила
Рулевое управление легкового автомобиля
Белорусский национальный технический университет
Автотракторный факультет
Кафедра: “Большегрузные автомобили”
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по дисциплине “Автомобили”
Тема
«Рулевое управление легкового автомобиля»
Выполнил: 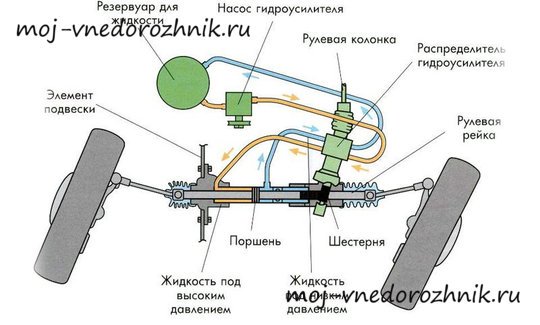 А.
А.
студент гр. 301419
Руководитель:
Минск-2013
Содержание
2.Введение
3. Обзор схем и конструкций рулевых управлений легковых автомобилей
4. Описание
работы, регулировок и технических
характеристик проектируемого
5. Кинематический расчет рулевого управления
6. Силовой расчет рулевого управления
7. Гидравлический расчет рулевого управления
8. Прочностной расчет рулевого управления
Заключения
Список используемой литературы
2.Введение
Рулевое управление
– это совокупность устройств, обеспечивающих
поворот управляемых колес  Для облегчения поворота колес
в рулевой механизм или привод
может встраиваться усилитель. Рулевой
механизм предназначен для передачи
усилия от водителя к рулевому приводу
и для увеличения крутящего момента,
приложенного к рулевому колесу. Рулевым
механизмом называют механизм, который
позволяет осуществить поворот
колес с необходимым
Для облегчения поворота колес
в рулевой механизм или привод
может встраиваться усилитель. Рулевой
механизм предназначен для передачи
усилия от водителя к рулевому приводу
и для увеличения крутящего момента,
приложенного к рулевому колесу. Рулевым
механизмом называют механизм, который
позволяет осуществить поворот
колес с необходимым
В данной курсовой работе содержится обзор современных конструкций систем рулевого управления, а также проведен расчет рулевого управления легкового автомобиля Мазда 6.
Конструкция рулевого управления должна обеспечивать:
- легкость управления, оцениваемую усилием на рулевом колесе.
 Для грузовых автомобилей: 250 Н — для рулевого управления без усилителя, 120 Н — для рулевого управления с усилителем;
Для грузовых автомобилей: 250 Н — для рулевого управления без усилителя, 120 Н — для рулевого управления с усилителем; - качение управляемых колес с минимальным боковым уводом и скольжением при повороте автомобиля;
- стабилизацию повернутых боковых колес, обеспечивающую их возвращение в положение, соответствующее прямолинейному движению, при отпущенном рулевом колесе;
- предотвращение передачи ударов на рулевое колесо при наезде управляемых колес на препятствие;
- минимальные зазоры в соединениях. Оцениваются углом свободного поворота рулевого колеса автомобиля, стоящего на сухой, твердой и ровной поверхности в положении соответствующему прямолинейному движению. По ГОСТ 21398 — 75 этот зазор не должен превышать 15° при наличии усилителя и 5° — без усилителя рулевого управления;
- отсутствие автоколебаний управляемых колес при работе автомобиля в любых условиях и на любых режимах движения.
Рисунок 2.1- Конструктивная схема рулевого управления
3.
 Обзор и анализ конструкций
рулевых управлений легковых
автомобилей
Обзор и анализ конструкций
рулевых управлений легковых
автомобилей
Рулевой механизм может представлять собой червячную (червяк-ролик или червяк-сектор) или винтовую(винт-гайка-рейка или винт-гайка-кривошип) конструкцию.
3.1 Рулевой механизм в виде пары глобоидальный червяк-
Рулевой механизм, расположенный в чугунном картере 16 (рис. 3.1), выполнен в виде пары глобоидальный червяк — двухгребневой ролик. Ролик 11 установлен на оси 12 головки вала рулевой сошки на двухрядном радиально-упорном шарикоподшипнике. Червяк 15, закрепленный на нижнем конце составного рулевого вала, установлен в картере 16 рулевого механизма на двух конических роликоподшипниках. Подшипники регулируют нижней пробкой 17, ввернутой в картер на резьбе. Пробку фиксируют стопорной гайкой. Вал червяка уплотняют в картере сальником 14.
Рисунок 3.1— Рулевой механизм в виде пары глобоидальный червяк — двухгребневой ролик
Вал 28 рулевой
сошки 18 лежит в приливе картера на бронзовых
втулках и уплотнен сальником 29.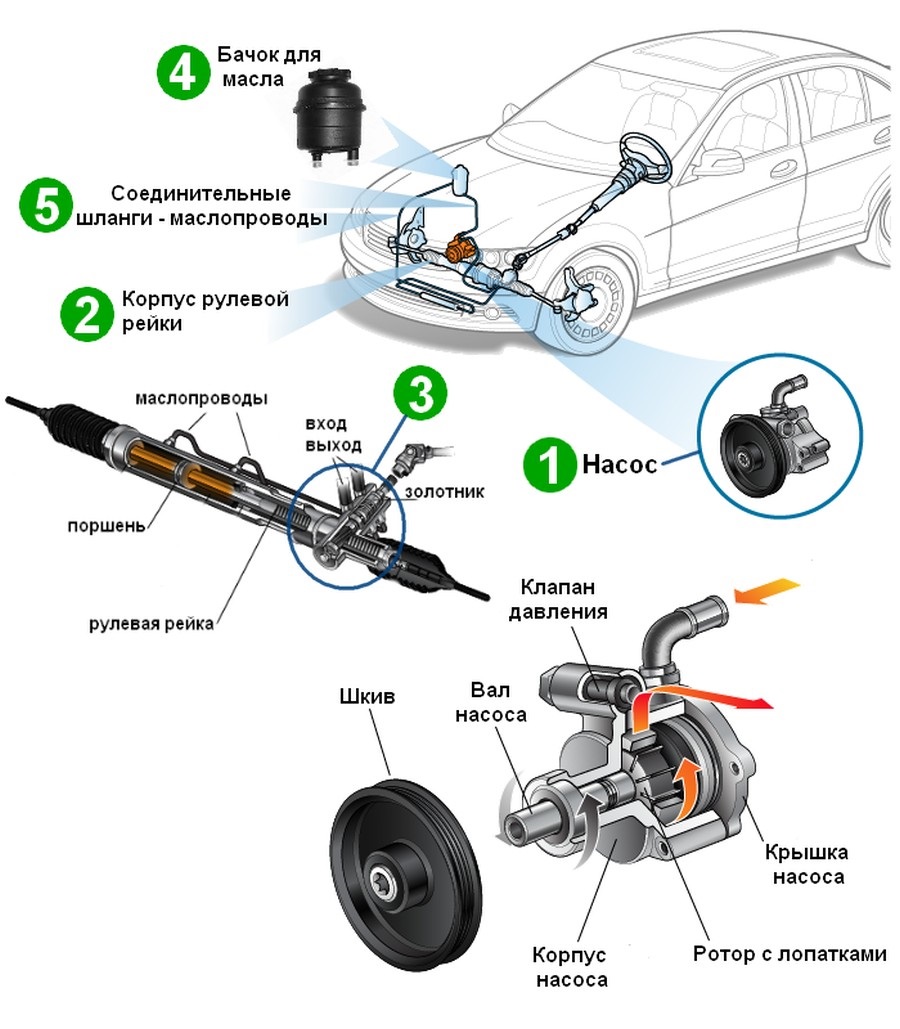 Зацепление
ролика с червяком регулируют винтом 30,
ввернутым в верхнюю крышку 31 картера
и входящим головкой с регулировочной
шайбой в паз вала рулевой сошки. Винт
закреплен контргайкой.
Зацепление
ролика с червяком регулируют винтом 30,
ввернутым в верхнюю крышку 31 картера
и входящим головкой с регулировочной
шайбой в паз вала рулевой сошки. Винт
закреплен контргайкой.
Картер 16 рулевого механизма крепят на кронштейне основания кузова. Между картером и кронштейном на один крепящий болт поставлены регулировочные шайбы 10. Картер в стенке кронштейна уплотнен резиновым уплотнителем 26.
Рулевой вал
3,4 установлен во втулке в резиновой обойме
33, закрепленной в кронштейне 32, который
прикреплен к щитку кузова. На верхнем
конце рулевого вала установлено рулевое
колесо / с двумя спицами. В центре колеса
расположена кнопка 2 включения звукового
сигнала. Нижний конец рулевого вала соединен
с валом 13 червяка на шлицах при помощи
стяжного зажима 27. Такая конструкция
составного рулевого вала с энергопоглощающим
промежуточным зажимом устраняет передачу
удара от картера на рулевой вал в случае
аварии автомобиля. Энергия удара поглощается
вследствие трения при скольжении вала
червяка в зажиме 27, затягиваемом с определенным
усилием при сборке.
На наружном конце вала 28 укреплена на елочных шлицах гайкой с шайбой рулевая сошка 18, соединяемая шарнирно с левым концом поперечной рулевой тяги 19. Правый конец этой тяги соединен с маятниковым рычагом 21, закрепленным на пальце 25, который установлен на двух конусных резиновых втулках 24. Втулки зажаты шплинтуемой гайкой с шайбой в кронштейне, закрепленном с правой стороны на кронштейне трубчатых кожухов передней подвески. Рулевая сошка 18 и маятниковый рычаг 21 боковыми тягами 22 шарнирно соединены с рычагами 23, закрепленными в поворотных кулаках передних колес. Соединения рулевых тяг выполнены на шаровых сочленениях.
В каждом сочленении
хвостовик шарового пальца 9 коническим
концом закреплен шплинтуемой гайкой
в головке рычага. Шаровой палец 9 установлен
в головке 8 тяги на двух пластмассовых
вкладышах 4, поджимаемых подпятником
5 с пружиной 7. Пружина упирается в заглушку
6, укрепленную в головке стопорным кольцом.
Шаровое сочленение закрыто резиновым
чехлом 3 с опорной шайбой.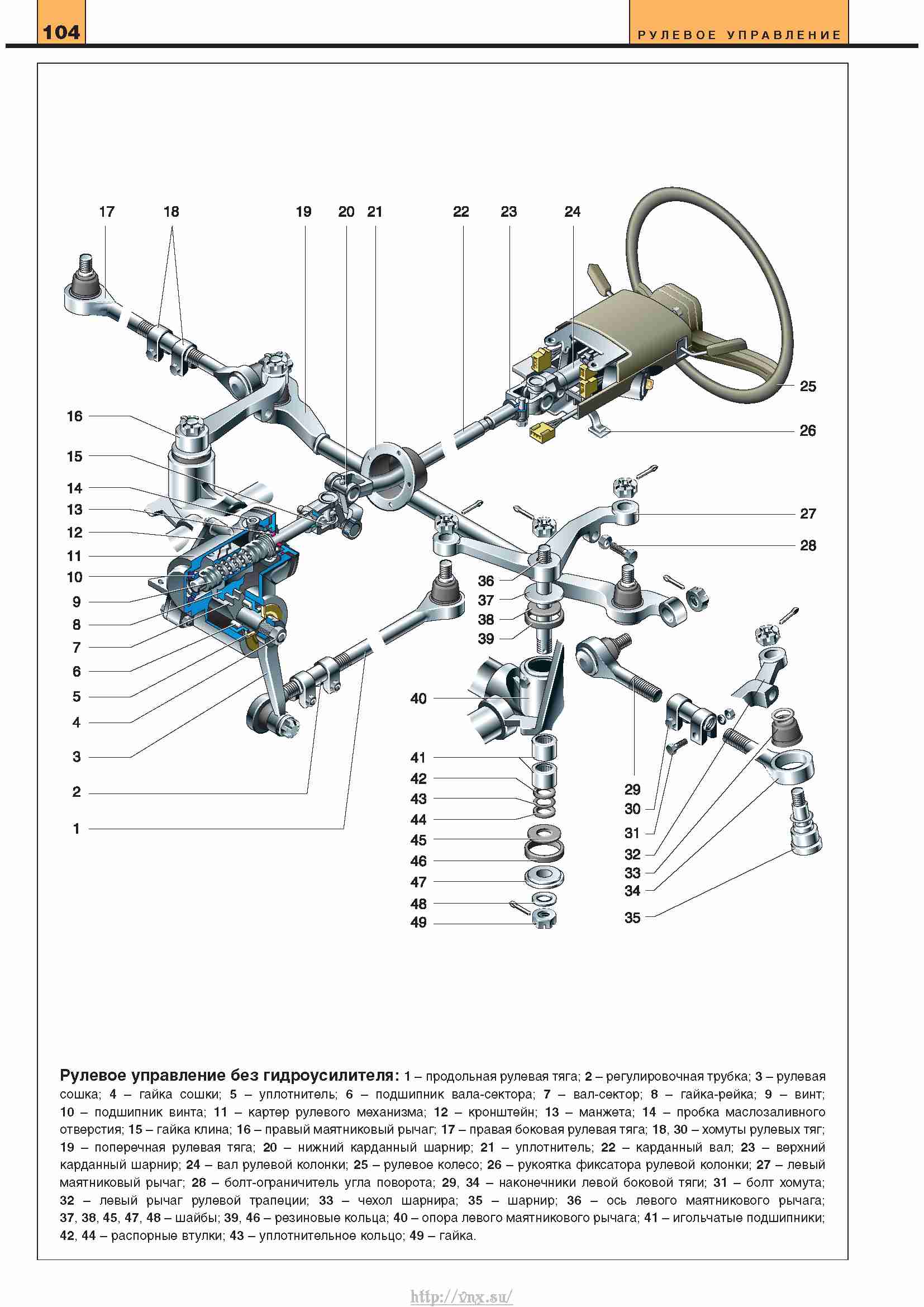
Наконечники шаровых сочленений соединяются с поперечной тягой 19 На резьбе. Это дает возможность изменять длину тяги и регулировать схождение колес. В установленном положении наконечники закрепляют в тяге контргайкой.
Наибольший
поворот управляемых колес
3.2 Рулевой механизм с цилиндрическим червяком и боковым сектором
Рисунок 3.2.1— Рулевой механизм с цилиндрическим червяком и боковым сектором
На конец трубчатого вала 12 напрессован червяк 4. Опорами вала в картере 7 служат конические роликовые подшипники 3 и 8, установленные с предварительным
натягом, который регулируют прокладками 9. Зубья червячного сектора 5 нарезаны
на боковой поверхности, выполненной как
одно целое с валом рулевой сошки. Вал
поворачивается в картере на двух игольчатых подшипниках 13 и 14. На конце вала имеется конусная
поверхность, на которой нарезаны мелкие
шлицы для крепления сошки.
Вал
поворачивается в картере на двух игольчатых подшипниках 13 и 14. На конце вала имеется конусная
поверхность, на которой нарезаны мелкие
шлицы для крепления сошки.
Зацепление червяка с сектором выполнено
так, что зазор в зацеплении увеличивается
при повороте червяка в обе стороны от
среднего положения. Минимальный зазор
в среднем положении определяется толщиной
упорной шайбы 15, которая предохраняет вал от осевого
перемещения.
3.3 Рулевой механизм реечного типа (винт-гайка-рейка)
Но с середины 70-х годов, с распространением на легковых автомобилях переднего привода, стали в основном ставить тип рулевого механизма — «шестерня—рейка» или попросту реечный, будучи легче и технологичнее других механизмов, идеально подходит для переднеприводной компоновки и подвески McPherson, обеспечивая большую легкость и точность рулевого управления.
Рисунок 1.6 Реечный рулевой механизм с тягами
Рассмотрим несколько  Заметим что на сегодня для грузовых автомобилей
актуальна система с «винт- шариковая
гайка- рейка- сектор», и является приоритетной
для грузовых машин, пикапов и больших
внедорожников, однако появляются тенденции
ставить даже на них реечные механизмы,
примером может служить реечный рулевой
механизм Freightliner Cascadia.
Заметим что на сегодня для грузовых автомобилей
актуальна система с «винт- шариковая
гайка- рейка- сектор», и является приоритетной
для грузовых машин, пикапов и больших
внедорожников, однако появляются тенденции
ставить даже на них реечные механизмы,
примером может служить реечный рулевой
механизм Freightliner Cascadia.
Рисунок 1.7 Реечный рулевой механизм Freightliner Cascadia
1 — рулевая рейка; 2 — поршень; 3 — сальники;
4 — шарниры рулевых тяг; 5 — распределитель с золотником;
6 — шестерня; 7 — торсион; 8 — роторный гидронасос
Рисунок 1.8 Реечный рулевой механизм с гидроусилителем.
Если рулевые тяги, как здесь, располагаются по бокам рейки, то поршень размещается посередине корпуса. А если тяги крепятся к центральной части рейки, как это сделано на Самарах и Москвиче-2141, то поршень выносят вбок.
Работу
рулевого управления также характеризует
общее передаточное отношение системы,
а также интенсивность усиления
воздействия водителя на рулевое
колесо и здесь вариантов много.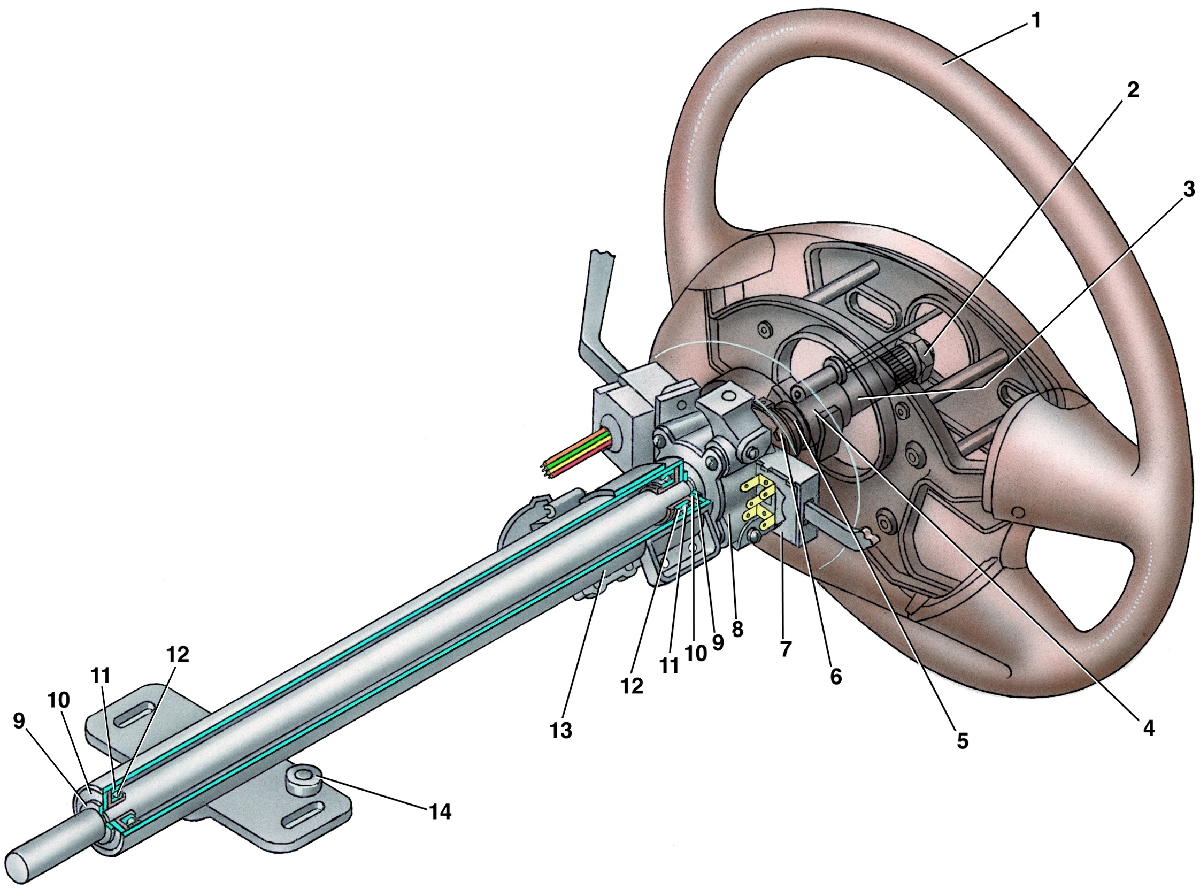
Основным критерием системы является ее информативность или обратная связь, т.е усиление должно быть не малым но и не сильно большим для того чтобы не лишать водителя «чувства дороги». На необходимое и достаточное усиление влияет ряд факторов: производительность насоса, параметры золотника и жесткость торсиона, геометрия передней подвески и углы установки колес (от этого в первую очередь зависит величина возвращающего усилия), параметры задней подвески, уводные характеристики шин и даже жесткость кузова на скручивание. Еще одна задача, которая стоит перед конструкторами, — сделать так, чтобы на маленькой скорости руль был легким, а на большом ходу становился более упругим и информативным.
Несколько лет назад, появились
серийные гидроусилители с электронной
регулировкой работы распределителя в
зависимости от скорости.
В американской системе Magnasteer производства
фирмы Delphi Saginaw, которой снабжены некоторые
автомобили концерна General Motors (Chevrolet Corvette,
многие модели Cadillac), с помощью электромагнитного
устройства изменяется жесткость торсиона
следящего устройства.
Рисунок 1.9 Разъем соединяет блок управления с электромагнитным устройством изменения жесткости торсиона
| 1 — гидронасос с бачком; 4 — реечный рулевой
механизм с гидроусилителем; |
Рисунок 1.10 Система Magnasteer | |
А в немецких гидроусилителях ZF Servotronic, которые стоят на машинах Audi A6 и A8, BMW 5-й и 7-й серий и всех моделях Jaguar, на помощь золотнику приходит электрогидравлический модулятор давления — с ростом скорости по сигналу от управляющего блока он ограничивает давление в рабочем контуре, и помощь гидроусилителя сходит на нет.
| 1 —
электронный спидометр; 5 -гидронасос; 7 — карданный шарнир |
Рисунок 1. | |
 10 Гидроусилители
ZF Servotroniс
10 Гидроусилители
ZF Servotroniс
Реечный рулевой механизм с гидроусилителем и переменным усилием на руле ZF Servotronic. С ростом скорости электрогидравлический модулятор снижает помощь усилителя до нуля.
Существует еще один вариант
решения — приводить насос
гидроусилителя не от коленчатого вала
двигателя, а от электромотора. Тогда,
с помощью электроники изменяя частоту
вращения электропривода, можно варьировать
производительность насоса как угодно.
Такая схема применяется в гидроусилителях
автомобилей Mercedes-Benz А-класса. Однако на
прямой вообще отключать насос, чтобы
экономить топливо (на привод гидронасоса
уходит несколько лошадиных сил), неосуществимо
— при резком отклонении баранки давление
не успеет возрасти так быстро, и руль
может «закусить».
Впрочем, выход уже найден. Это электроусилители,
в которых не осталось никакой гидравлики!
На торсионе следящего устройства стоит
датчик, и в зависимости от его сигнала
электроника подает ток нужной полярности
и силы на обмотки электромотора, связанного
с рулевым механизмом через червячную
передачу. А по сигналам от датчика скорости
можно изменять характеристику усилителя
в соответствии с любой заложенной в память
блока зависимостью.
А по сигналам от датчика скорости
можно изменять характеристику усилителя
в соответствии с любой заложенной в память
блока зависимостью.
| | |
1 рулевая колонка; 2 электроусилитель с червячной передачей и электронным блоком управления;3 промежуточный вал; 4 реечный рулевой механизм; 5 следящее устройство с торсионом; 6 блок управления; 7 электропривод с механизмом винт—шариковая гайка—рейка
4.Описание работы, регулировок и технических характеристик проектируемого узла
4.1 Особенности конструкции
Рисунок 5.1.1-Реечный рулевой механизм
В рулевом
механизме показанном на рисунке 2.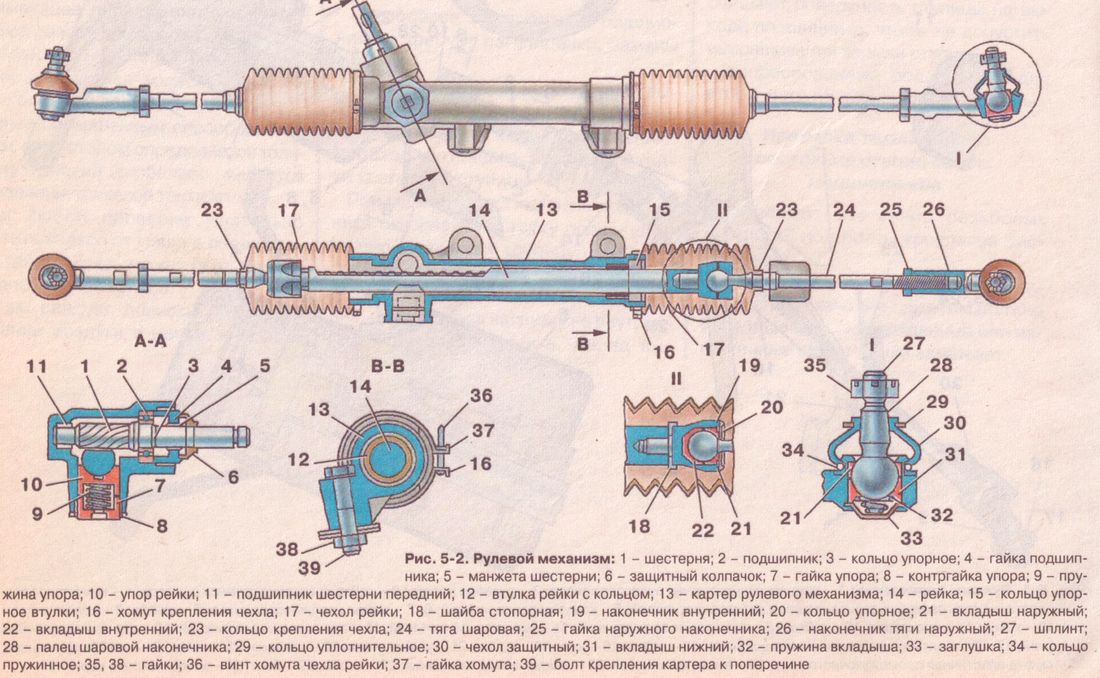 1 , вал-шестерня
1 и рейка 6 размешены в картере 7 открытые
торцы которого защищены чехлам 5. Пружина
плунжера 9 и регулировочная пробка 8 обеспечивает
беззазорное зацепление рейки и шестерни
и гашение колебаний при ударах со стороны
дороги. К концам рейки с помощью шаровых
шарниров 4 присоединены боковые тяги
3 регулируемой длинны. Шарниры 2 соединяют
тяги 3 с поворотными рычагами колес. Обычно
вал-шестерню устанавливают в паре радиально
упорных подшипников 10 (рисунок 2.1 а), или
в радиальном подшипнике 12 с увеличенной
глубиной канавок для повышения несущей
способности в осевом направлении и игольчатом
подшипнике 11(рисунок 2.1б). Прямой и обратный
КПД соответственно 0.65 и 0.59.
1 , вал-шестерня
1 и рейка 6 размешены в картере 7 открытые
торцы которого защищены чехлам 5. Пружина
плунжера 9 и регулировочная пробка 8 обеспечивает
беззазорное зацепление рейки и шестерни
и гашение колебаний при ударах со стороны
дороги. К концам рейки с помощью шаровых
шарниров 4 присоединены боковые тяги
3 регулируемой длинны. Шарниры 2 соединяют
тяги 3 с поворотными рычагами колес. Обычно
вал-шестерню устанавливают в паре радиально
упорных подшипников 10 (рисунок 2.1 а), или
в радиальном подшипнике 12 с увеличенной
глубиной канавок для повышения несущей
способности в осевом направлении и игольчатом
подшипнике 11(рисунок 2.1б). Прямой и обратный
КПД соответственно 0.65 и 0.59.
Автомобиль ADAMS — Оптимизация геометрии рулевого управления
Автомобиль ADAMS — Оптимизация геометрии рулевого управленияВыполнить оптимизацию геометрии рулевого управления для достижения следующих целей Внешний диаметр окружности поворота — менее 12,0 м по Аккерману при внутреннем угле поворота 20 градусов — ~60% ограничения Максимальный угол поворота внутренней шины – 40 градусов (из соображений габарита/упаковки шины) Максимально допустимая стойка…
Детали проекта
Загрузка. ..
..
Оставить комментарий
Спасибо, что решили оставить комментарий. Пожалуйста, имейте в виду, что все комментарии модерируются в соответствии с нашей политикой комментариев, и ваш адрес электронной почты не будет опубликован по соображениям конфиденциальности. Пожалуйста, оставьте личный и содержательный разговор.
Пожалуйста, войдите, чтобы добавить комментарий
Другие комментарии…
Комментариев пока нет!
Оставьте первый комментарий
Подробнее Проекты Hashwanth R (19)
Логика управления переключением передач и стиральной машиной с использованием Stateflow
Задача: 1. Реализовать логику управления «стиральной машиной» с использованием Stateflow в соответствии с заданной последовательностью: Если питание доступно, система активируется Если подача воды недоступна, остановите процесс и индицируйте с помощью светодиода Время замачивания должно составлять 200 секунд, за которым следует время стирки 100 секунд. Затем…
Затем…
28 нояб. 2022 17:41 IST
ПодробнееМоделирование HEV Задания — Моделирование состояния полностью открытой дроссельной заслонки
Задача:1. В чем разница между картографической и динамической моделью двигателя, мотора и генератора? Как изменить тип модели? В моделях Mapped используются справочные таблицы установившегося состояния, чтобы охарактеризовать производительность двигателя, мотора и генератора. Например, сопоставленный двигатель представляет поведение двигателя в виде набора…
28 ноября 2022 г. 17:38 IST
- HEV
- MATLAB
Введение в HEV с использованием MATLAB и Simulink — Расчет торможения Энергия, рекуперация Стратегии торможения и построение контурной карты E-Motor Efficiency 92)` Где, `B_(энергия)` – энергия торможения в джоулях (Дж), `m` – масса в кг, `v_i` – начальная скорость транспортного средства в м/с, а `v_f` – …
28 ноября 2022 17:36 IST
- MATLAB
Автомобиль ADAMS — Оптимизация геометрии шкворня — Конструкция подвески
Цель: 900 04Оптимизация геометрии шкворня для достижения следующих целей oУгол поворота: ~ 4,00° o Рычаг кастера: ~21,00 мм Угол oKPI: ~13,00° oСмещение оси рулевого управления (результирующее): ~85,00 мм oПродольное смещение оси рулевого управления: ~0,00 мм oРадиус зачистки: ~20,00 мм Сравните эти цифры с полученными ранее…
16 сент. 2022 г. 07:58 IST
2022 г. 07:58 IST
Моделирование и сравнение управления двигателем постоянного тока с использованием H-моста BJT, четырехквадрантного прерывателя постоянного тока и двухквадрантного прерывателя.
Цель:1. A. Объясните демонстрационную модель MATLAB под названием «Управление скоростью двигателя постоянного тока с использованием H-моста BJT». Модель демонстрирует, как H-мост используется для генерации прерываемого напряжения, а также для управления скоростью двигателя постоянного тока. Биполярный соединительный транзистор (BJT) — это тип транзистора, который в данном случае действует как переключатель.
16 сент. 2022 г. 07:10 IST
- MATLAB
Моделирование трансмиссии электромобиля и двигателя постоянного тока с использованием Simulink
Цель: 90 003 1. Какие типы схем силовых преобразователей применяются в электрических и гибридный электромобиль? Существуют различные типы преобразователей мощности, используемые как в электрических, так и в гибридных электромобилях.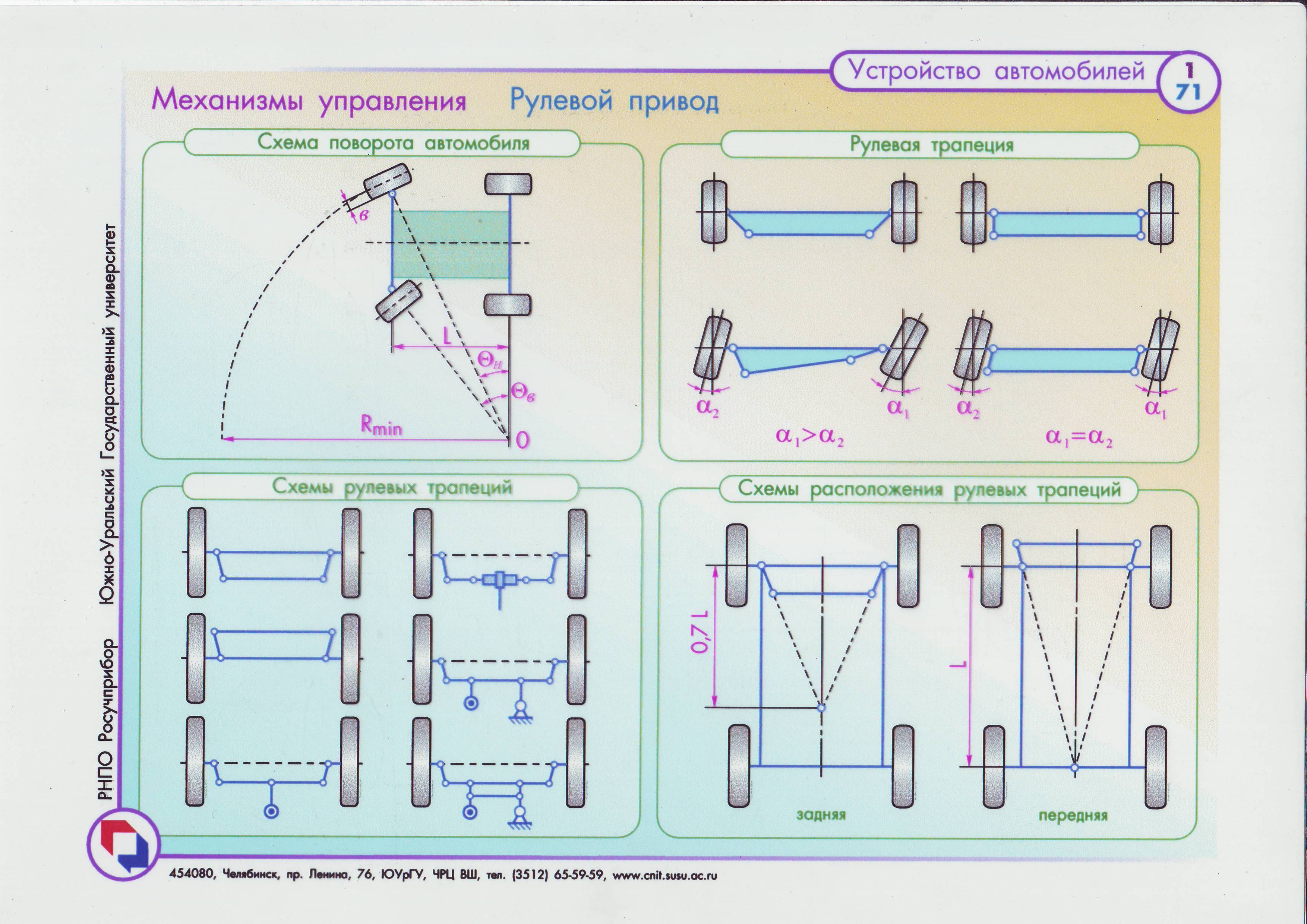 На следующей диаграмме показаны различные типы используемых преобразователей мощности. Различные…
На следующей диаграмме показаны различные типы используемых преобразователей мощности. Различные…16 сент. 2022 г. 07:07 IST
ПодробнееМоделирование EV с помощью инструмента ADVISOR
Цель:Используйте инструмент ADVISOR и смоделируйте следующее 1. Для файла EV_defaults_in: при массе груза 500 кг со всеми остальными условия по умолчанию, может ли автомобиль проехать 45 км с ездовым циклом FTP? Завершите свои наблюдения. Транспортное средство EV_defaults_in моделируется с помощью инструмента ADVISOR для грузового…
16 сент. 2022 07:02 IST
ПодробнееМоделирование вездехода (ATV) с бесступенчатой трансмиссией — финальный проект
Цель: Модель квадроцикла BAJA: Разработана модель вездехода (ATV) с бесступенчатой трансмиссией (CVT). , и наблюдается влияние различных дроссельных и тормозных усилий на характеристики автомобиля и скорость шкивов вариатора. Основная цель состоит в том, чтобы сравнить два набора моделей — модель с открытым контуром, в которой…
Основная цель состоит в том, чтобы сравнить два набора моделей — модель с открытым контуром, в которой…
16 сентября 2022 г. 07:01 IST
- MATLAB
Simulink модель дверного звонка с использованием соленоидного блока.
Цель:1. Создайте модель дверного звонка в Simulink, используя соленоидный блок со следующими деталями: звук. Создайте ситуацию, когда переключатель замкнут на…
16 сент. 2022 06:58 IST
ПодробнееМоделирование одномерного течения в сверхзвуковом сопле с использованием метода Макормака в MATLAB
Цель: Моделирование изоэнтропического течения через квазиодномерное дозвуковое-сверхзвуковое сопло с использованием форм сохранения и несохранения управляющие уравнения. Описание проблемы: Рассматриваемая геометрия представляет собой стационарное изоэнтропическое течение в сужающемся-расширяющемся сопле.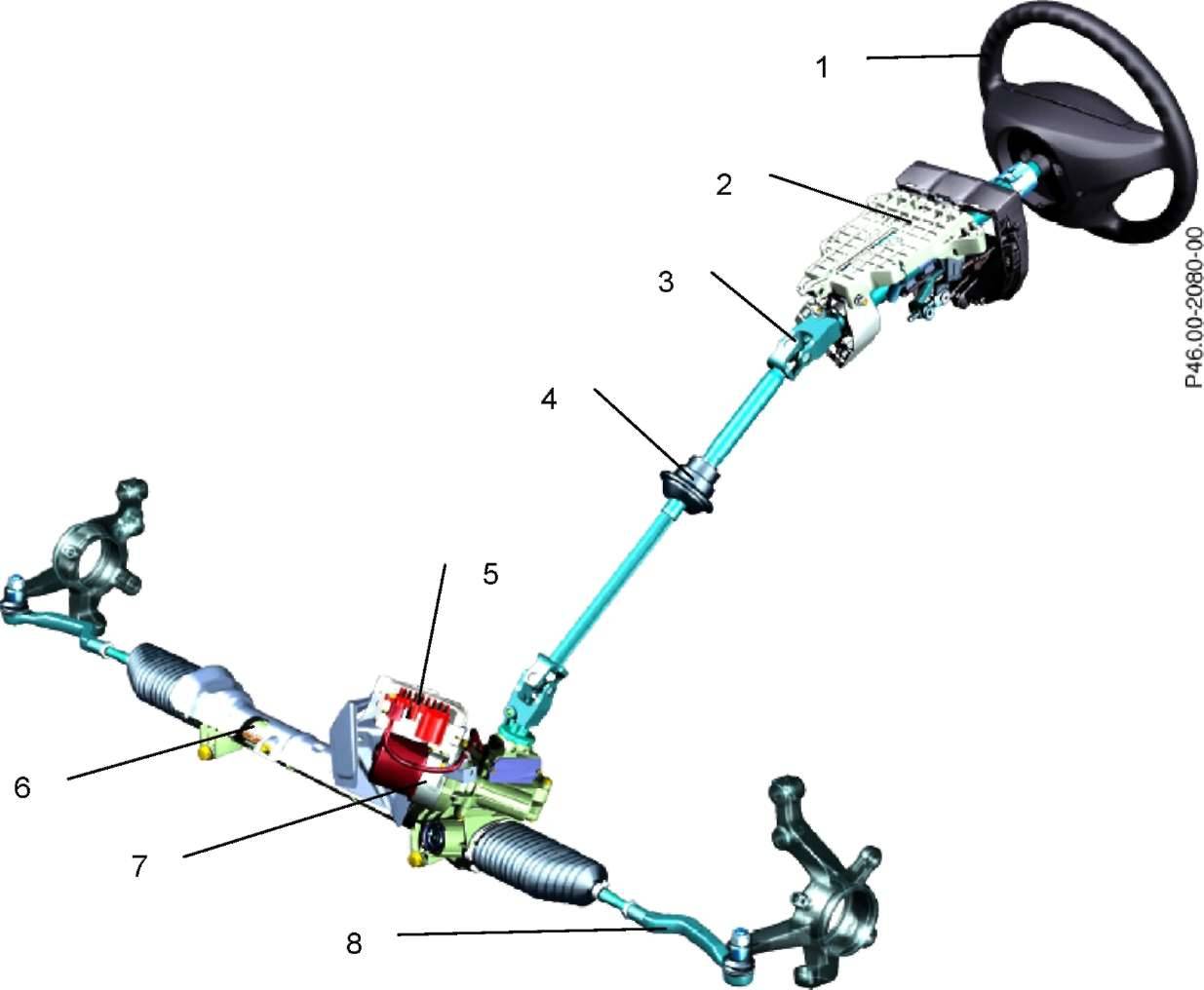 Поток на входе поступает от…
Поток на входе поступает от…
16 сент. 2022 06:57 IST 92` с приближением четвертого порядка можно использовать таблицу Тейлора. Центральная разность…
16 сент. 2022 06:55 IST
- MATLAB
ADAMS Car — Оптимизация геометрии рулевого управления
Цель:Выполнить оптимизацию геометрии рулевого управления для достижения следующих целей Внешний диаметр окружности поворота – менее 12,0 м по Аккерманну при внутреннем угле поворота 20° – ~60% На них распространяются следующие ограничения Максимальный угол поворота внутренней шины – 40° (по причинам, связанным с оболочкой/упаковкой шины) Максимально допустимая стойка…
16 сент. 2022 06:40 IST
Подробнее Автомобиль ADAMS. Оптимизация колес и скорости движения. Конструкция подвески используя формулы, обсуждавшиеся на уроке. Почему число, полученное в симуляции, отличается? Целевая скорость вращения колеса составляет 20 Н/мм. Достичь этого можно двумя способами: Модифицировать пружину Модифицировать точки подвески (заменить пружину…
Почему число, полученное в симуляции, отличается? Целевая скорость вращения колеса составляет 20 Н/мм. Достичь этого можно двумя способами: Модифицировать пружину Модифицировать точки подвески (заменить пружину…
16 сент. 2022 06:25 IST
ПодробнееДинамика автомобиля — окончательный проект — проектирование ARB для соответствия целевому градиенту крена и выбор параметра K&C для соответствия целевому бюджету недостаточной поворачиваемости
Цель:Файл Excel ссылка выглядит следующим образом: https://drive.google.com/file/d/1hOziM_YhsHSHBXvX2V9lySka3kb6s30R/view?usp=sharing Цель проекта: Целью проекта является выбор диаметров стабилизатора поперечной устойчивости для соответствия целевому градиенту крена. а также подбору соответствующих кинематических и податливых параметров…
16 сент.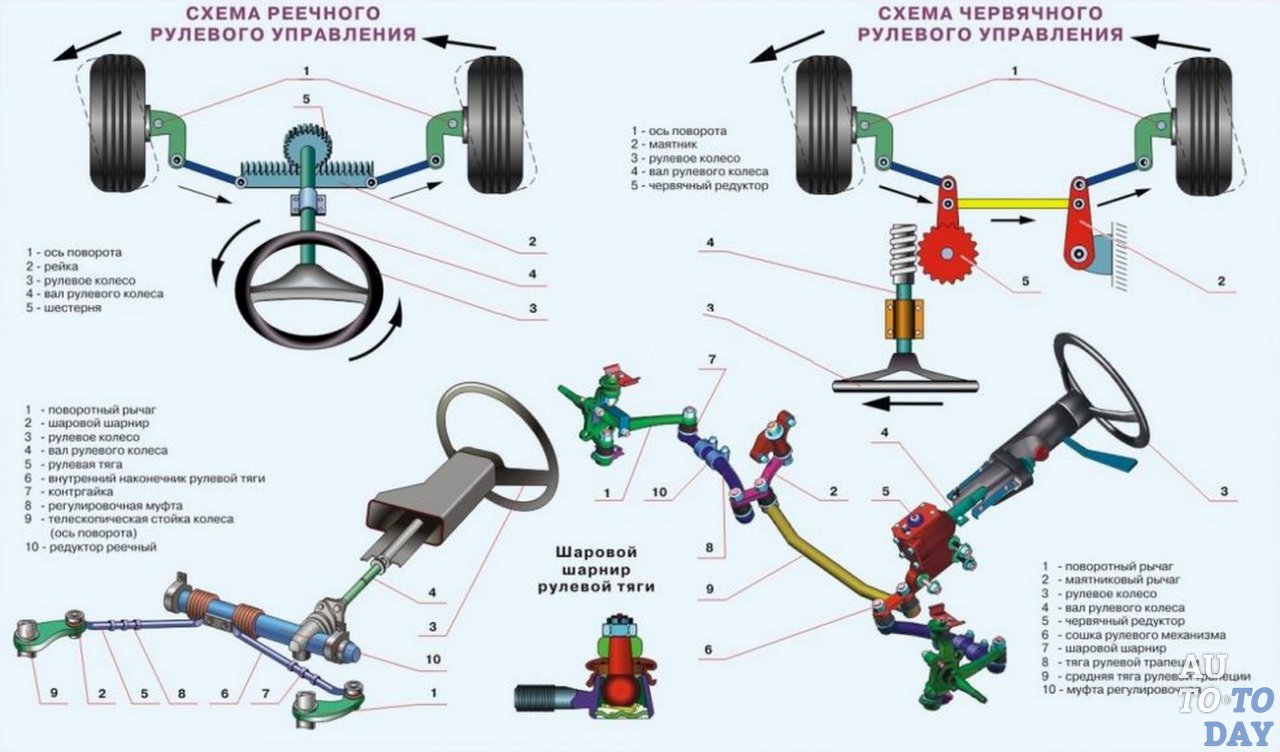 2022 06:03 IST
2022 06:03 IST
Моделирование шин — Pacjecka Magic Tire Formula и комбинированная модель шины Slip brush
Цель:Набор задач 2a Написать октавный скрипт, чтобы показать влияние углов скольжения ( от 2 до 10 градусов с шагом 2) в зависимости Fx от Fy. Используйте диапазон коэффициента скольжения от 0 до 1 (или от 0 до 100%). Используйте комбинированную модель шины с щеткой скольжения, которую мы разработали в классе. Разработайте свой сценарий на основе алгоритма. Вот ваши результаты: 1.…
16 сент. 2022 01:57 IST
ПодробнееОптимизация демпфера.
Задача: 1. Рассчитайте следующие параметры передней и задней подвески (по 2 балла за каждый – всего 16 баллов) 2. Используя информацию, полученную выше, составьте кривую зависимости силы от скорости удара для передней и задней подвески. подвески (диапазон скоростей = от 0 до 500 мм/сек) (по 7 баллов за передний и задний участки, всего…
подвески (диапазон скоростей = от 0 до 500 мм/сек) (по 7 баллов за передний и задний участки, всего…
16 сент. 2022 01:38 IST
ПодробнееПодбор пружин и стабилизатора поперечной устойчивости для соответствия требованиям уровня автомобиля.
Цель:Ссылка на файл Excel: https://drive.google.com/file/d/1gApZI-DvcbSHQZIA6vMBqv5uCvO4d9Pr/view?usp=sharing Цель проекта: Выбрать пружины и стабилизаторы поперечной устойчивости и настроить качание геометрия стрелы соответствует целевым показателям частоты движения, градиента крена и градиента тангажа, оставаясь при этом в определенных пределах…
16 сентября 2022 г. 01:31 IST
ПодробнееОценка качества дороги с использованием данных спектральной плотности мощности (PSD)
Цель: Шероховатость дорожного покрытия : Профиль шероховатости дорожного покрытия также называется профилем высот. Поскольку данные профиля дороги являются случайными, мы не можем использовать стандартные математические уравнения для представления профиля. Одним из полезных методов представления профиля дороги является спектральная плотность мощности (PSD)…
Поскольку данные профиля дороги являются случайными, мы не можем использовать стандартные математические уравнения для представления профиля. Одним из полезных методов представления профиля дороги является спектральная плотность мощности (PSD)…
16 сент. 2022 01:30 IST
ПодробнееПоказано 1 из 19 проектов
Попробуйте наши лучшие инженерные курсы, проекты и семинары уже сегодня!Забронируйте живую демонстрацию
Техническое объяснение: геометрия рулевого управления Ackermann
Геометрия рулевого управления — это один из многих инструментов, находящихся в распоряжении конструктора гоночных автомобилей, который позволяет добиться максимальной производительности автомобиля от всех четырех шин. В этой статье с техническими пояснениями мы расскажем о происхождении и назначении того, что известно как геометрия рулевого управления Аккермана, и о том, как ее вариации могут повлиять на характеристики шин во всем диапазоне эксплуатации автомобиля.
Определение Ackermann Steering
Рассмотрим маневр на повороте на низкой скорости, когда все шины находятся в чистом состоянии качения, а транспортное средство не скользит. Когда автомобиль движется по криволинейной траектории, все четыре шины следуют уникальным траекториям вокруг общего центра поворота, обозначенного синими дугами на рис. 1.
Когда автомобиль движется по криволинейной траектории, все четыре шины следуют уникальным траекториям вокруг общего центра поворота, обозначенного синими дугами на рис. 1.
Различные радиусы кривизны означают, что во избежание скольжения геометрия рулевого управления должна направлять внутреннее переднее колесо под большим углом, чем внешнее переднее колесо. Ackermann Steering относится к геометрической конфигурации, которая позволяет поворачивать оба передних колеса под соответствующим углом, чтобы избежать скольжения шин.
Для заданного радиуса поворота R, колесной базы L и ширины колеи T инженеры рассчитывают требуемые передние углы поворота (δ_(f,in) и δ_(f,out)) по следующим выражениям:
Разница в угле поворота передних колес как функция входного угла поворота известна как динамическое схождение. Если размеры транспортного средства известны, можно построить кривую желаемого изменения схождения для всего диапазона ожидаемых радиусов поворота, как в примере на рис. 2.
2.
Включая углы увода
Транспортному средству, движущемуся по криволинейному пути на скорости, требуется центростремительная сила, обеспечиваемая боковой силой шин, чтобы сохранить траекторию. Центростремительная сила возникает, когда шина принимает угол увода, о чем вы можете прочитать подробнее в этой предыдущей статье с техническими пояснениями .
Последующая разница между направлением шины и ориентацией пятна контакта смещает центр поворота автомобиля вперед, как показано на рис. 3.
Рисунок 3: Влияние угла скольжения шины на центр поворота автомобиля (источник: www.racing-car-technology.com.au) Если шина имеет угол скольжения, присутствующая составляющая скорости бокового скольжения больше нуля.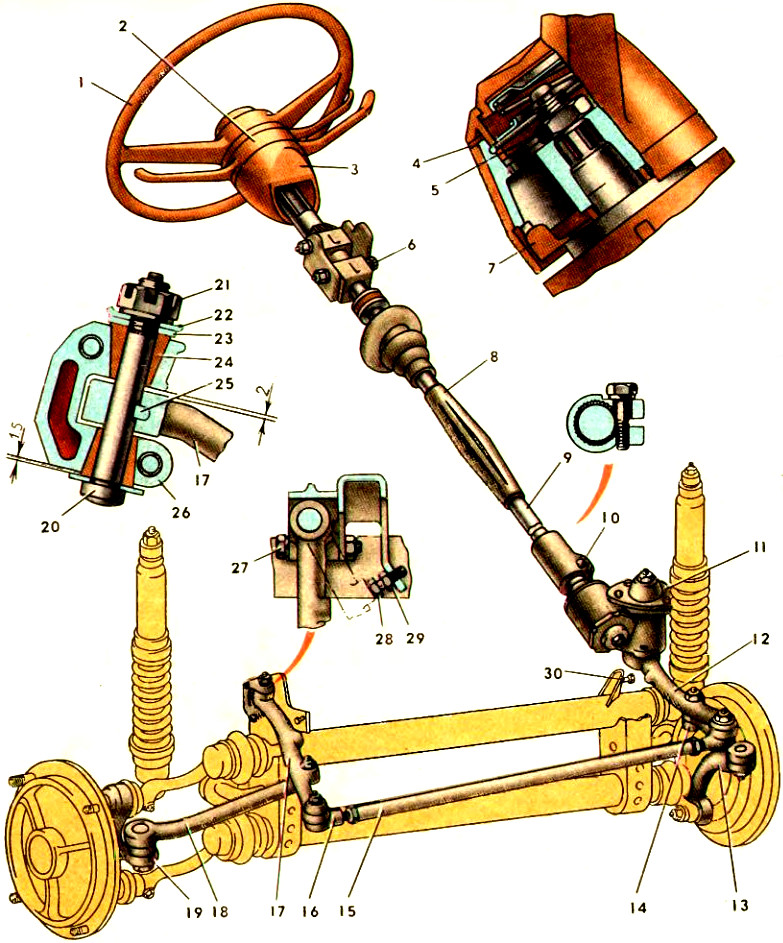
По этой причине цель состоит в том, чтобы точно настроить условия скольжения каждой шины, чтобы оптимизировать общую производительность, а не пытаться полностью избежать проскальзывания шины.
Ключом к раскрытию этих характеристик является понимание взаимосвязи между вертикальной нагрузкой и допустимой поперечной нагрузкой в шинах.
На рис. 4 показано соотношение поперечной силы и угла скольжения для шины Indy Lights в диапазоне вертикальных нагрузок.
Рисунок 4: Кривые поперечной силы в зависимости от угла скольжения для Cooper Tyres Indy Lights 2017 Передняя шинаЧем выше вертикальная нагрузка на шину, тем большую пиковую боковую силу она может создавать. При более высоких вертикальных нагрузках пиковая боковая сила возникает при более высоком угле скольжения. Эта тенденция ожидаема, но не обязательно присутствует во всех шинах и может зависеть от состава или конструкции.
Связь между вертикальной нагрузкой и пиковым углом скольжения известна как линия пиков. Характеристика линии пиков имеет важное значение из-за начала передачи поперечной нагрузки во время маневра на повороте, когда вертикальная нагрузка передается от внутренних шин к внешним шинам.
Характеристика линии пиков имеет важное значение из-за начала передачи поперечной нагрузки во время маневра на повороте, когда вертикальная нагрузка передается от внутренних шин к внешним шинам.
Крайне важно убедиться, что обе шины работают с максимальным углом увода одновременно, чтобы максимизировать производительность. В случае шины Indy Lights это означает, что более нагруженная внешняя шина должна иметь больший угол скольжения, чем внутренняя шина. Этого можно добиться, управляя внешней шиной больше, чем внутренней, при заданном усилии рулевого колеса.
Результат является полной противоположностью Акермановского рулевого управления и известен как обратный Акерману или антиаккермановский. Многие гоночные автомобили, оснащенные системой Anti-Ackermann, используют отдельные шины в пиковых условиях эксплуатации.
Designing for Ackermann
Уровень Аккермана в геометрии рулевого управления автомобиля представлен в процентах, где 100% Аккермана означает, что разница в угле поворота между внутренней и внешней шиной соответствует геометрическому центру поворота на низкой скорости.
Большинство гоночных автомобилей не работают на 100% по Акерману или на 100% по Анти-Акерману. Вместо этого они настраивают свое решение где-то посередине, чтобы соответствовать их конкретным целям проектирования и ожидаемым условиям эксплуатации.
При выборе геометрии рулевого управления для гоночного автомобиля конструктор должен учитывать несколько важных моментов. Дизайнеры должны понимать профиль скорости и характеристики трассы, на которой будет участвовать автомобиль.
Чем медленнее и теснее трасса, тем важнее становится нанять Аккерманна для помощи в прохождении шпилек и других крутых поворотов, где геометрия доминирует над всем остальным. В то время как автомобиль Формулы-1, проходящий поворот радиусом 200 м, может значительно выиграть от Anti-Ackermann, аналогичная установка серьезно помешает автомобилю Formula Student пройти поворот радиусом 5 м. шпилька.
Пример использования Anti-Ackermann на автомобиле Red Bull F1 показан на рисунке 5.
Рисунок 5: Пример использования Anti-Ackermann на автомобиле Red Bull F1 (источник: apexspeed. com)
com)Дизайнеры должны использовать автомобиль и характеристики гусеницы для прогнозирования вертикальных нагрузок на все четыре шины на протяжении круга. Фундаментальные факторы могут включать вес, высоту дорожного просвета, распределение поперечной нагрузки и уровни прижимной силы, а сложность анализа может зависеть от доступной информации.
Точная аппроксимация вертикальных нагрузок на всех поворотах может быть объединена с информацией о линии пиков, извлеченной из анализа данных шин, чтобы понять пиковые углы скольжения для обеих передних шин на каждом повороте. Разработчики могут использовать эту информацию для построения целевой кривой динамического схождения, как показано на рис. 2.
Во многих случаях компоновочные и кинематические ограничения могут сделать невозможным создание геометрии рулевого управления, которая может соответствовать этой целевой кривой для всех углов гусеницы. Разработчику придется решить, где они готовы пойти на компромисс в производительности.