
Роботизированная коробка передач — что это? Плюсы и минусы. Отличия от автоматической
Введение
Большинство людей, имеющих автомобили, при фразе «Автоматическая коробка передач» представляют себе селектор выбора режима движения вместо рычага «механики» на центральном тоннеле и две педали заместо прежней тройки.
Но есть вторая категория автолюбителей. Они знают о том, что есть разновидности автоматических трансмиссий.
Самой распространенной после классической автоматической гидротрансформаторной коробки передач является коробка-робот.
Результатом прочтения нашей статьи станет точный и максимально подробный ответ на вопрос: «коробка передач робот — что это такое?»
Итак, начнем.
Роботизированная коробка передач – одна из разновидностей автоматических трансмиссий. Но дабы лучше понять, в чем отличия от классической автоматической трансмиссии, необходимо рассмотреть конструкцию типовой роботизированной коробки передач.
Конструкция в подробностях
Важно помнить, что коробка передач от каждого производителя может отличаться своими особенностями, что рождает несколько отличную от типовой конструкцию. Но даже в этом всем разнообразии можно разглядеть 4 элемента, присутствующие в каждом из подобных агрегатов.
Но даже в этом всем разнообразии можно разглядеть 4 элемента, присутствующие в каждом из подобных агрегатов.
Это сцепление, его привод, механическая часть, т.е. сама коробка передач и ее приводы переключения, а также центральный блок управления обоими приводами для координации всей работы.
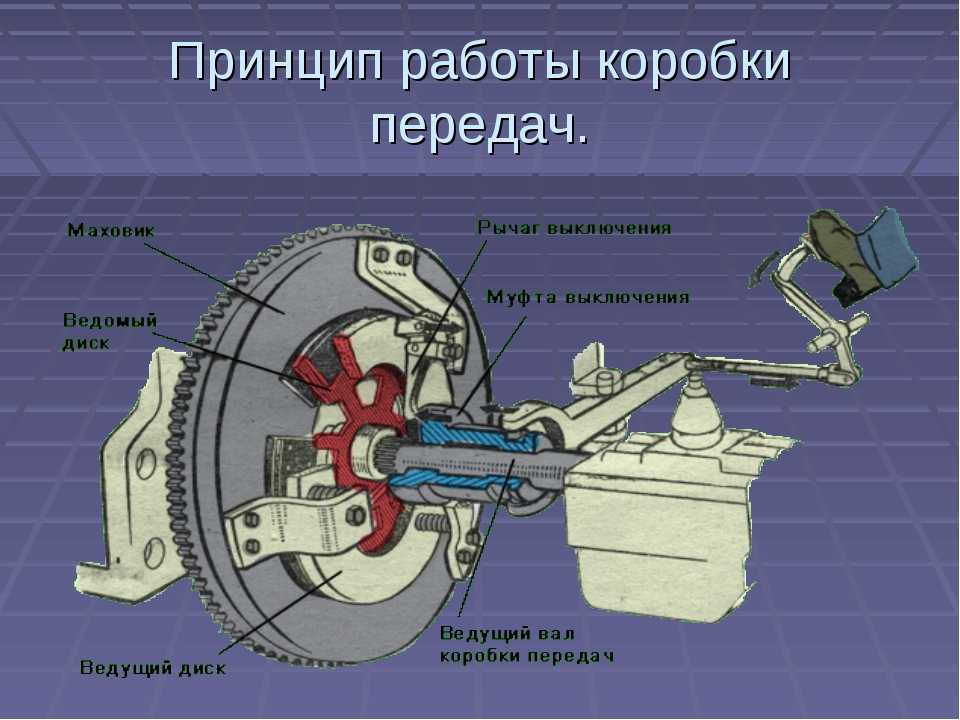
Теперь, когда основные «герои» известны, займемся изучением всей «пьесы». Т.к. в основе имеется стандартная коробка передач, не будем описывать подробно её принцип работы. Лишь упомянем, что внутри ее корпуса находятся 2 вала — первичный (или ведущий) и вторичный (или ведомый). Далее, шестерни, расположенные на них, переводятся в необходимое положение с помощью системы тяг для зацепления и дальнейшей совместной работы по вращению.
Это все о механической части роботизированной коробки. А вот сам механизм управления переключениями – это включение привода сцепления и переключение передач при помощи актуаторов. Важно лишь обозначить, что они могут быть 2-х видов – электрическими, либо гидравлическими. Первые работают максимально плавно, но требуют дополнительных затрат энергии для своей работы. Электрические же менее затратные, но именно они порождают толчки от переключений.
Первые работают максимально плавно, но требуют дополнительных затрат энергии для своей работы. Электрические же менее затратные, но именно они порождают толчки от переключений.
Итак, получаем на выходе автоматическое управление привычной коробкой передач при том, что в салоне расположен селектор заместо рычага и педалей две вместо трех.
Но действий, которые невидны владельцу, при нажатии газа здесь намного больше. Ведь о всех них заботится блок управления, какой, по существу, есть компьютером, посылающим команды подконтрольным приводам включения и переключения.
Плюс и минус
Как любой механизм, роботизированная коробка передач имеет свои плюсы и минусы.
Автомобильные форумы просто разрывались различными комментариями, в основном отрицательными, владельцев автомобилей с подобной трансмиссией. Сейчас же споры утихли – покупатели стали разборчивее и внимательнее относиться к тем характеристикам, которыми обладает приобретаемый автомобиль.
Первый и самый распространенный отрицательный момент – это рывки в момент переключения передачи. В большинстве случаев исправить этот момент невозможно – конструктивная особенность.
В большинстве случаев исправить этот момент невозможно – конструктивная особенность.
Вторым отрицательным моментом является перегрев сцепления при движении в пробках. Происходит это из-за неисправного или «задумчивого» механизма выключения сцепления. Вдобавок, нагревать диски сцепления может торможение, которое выполняет коробка передач, а именно блок управления.
Также немало впечатлений приносит сам процесс переключения между передачами. В отдельных случаях вам необходимо ускориться. Но для переключения передач скорость не соответствует той, что задана в блоке управления для перехода на высшую ступень. И тут автомобиль вместо ускорения начинает замедляться на какие-то секунды и только потом переходить на ускорение. Единственное, что может спасти в таких ситуациях – это знание особенностей работы коробки передач, а также переход в ручное управление.
Еще одной особенностью является постоянное нахождение автомобиля на скорости. Это приводит к износу деталей сцепления в целом и выжимного подшипника в частности. Но, с другой стороны, работать селектором без нужды нет смысла.
Но, с другой стороны, работать селектором без нужды нет смысла.
Роботизированная трансмиссия во всем пытается соответствовать гидромеханическому «автомату». В последней при переходе в режим «Drive» и отпущенной педали тормоза автомобиль начинает плавно трогаться. Чтобы повторить подобное технологическое решение, инженеры сделали следующее: блок управления искусственно добавляет оборотов двигателя и частично сводит диски сцепления для начала движения. В итоге получается, что водитель на машине с роботизированной коробкой нажимает педаль тормоза в положении Drive, а сцепление продолжает получать износ, будучи частично сведенным.
По причине конструкции здесь нет режима «Parking». Это значит, что ручной тормоз в исправном состоянии обязательно нужно поддерживать, а также при старте под горку им нужно пользоваться и нельзя «зевать» – в любой момент машина с такой коробкой передач норовит скатиться в противоположную сторону.
Вообще, большинство селекторов управления роботизированными коробками имеют несколько иную форму, чем у классических автоматических трансмиссий.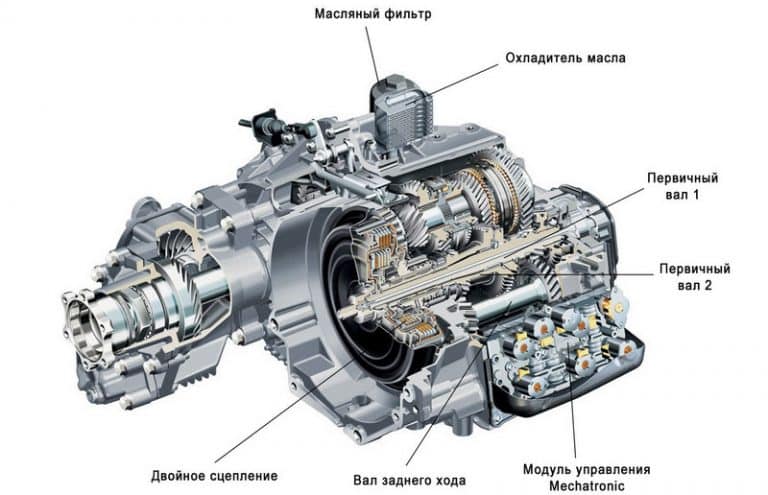 Поэтому визуально определить, какая разновидность коробки передач установлена в данном автомобиле, не составит труда. Во-первых, там отсутствует положение Parking, а во-вторых, присутствуют два уровня управления – ручной и автоматический.
Поэтому визуально определить, какая разновидность коробки передач установлена в данном автомобиле, не составит труда. Во-первых, там отсутствует положение Parking, а во-вторых, присутствуют два уровня управления – ручной и автоматический.
Отсюда можно выделить первую положительную черту роботизированных коробок передач – возможность выбора способа переключения.
Кроме этого, в положительные стороны данной конструкции зачисляют малый вес самой КПП, а также уменьшенный расход топлива, в сравнении с гидромеханикой. Еще важным фактом при выборе подобного агрегата станет цена – она значительно ниже той, что имеет аналогичный автомобиль с классической трансмиссией.
И в заключении нужно отметить, что данную трансмиссию вполне реально обслуживать в гаражных условиях, ведь замена масла аналогична механической коробке передач.
Важно отметить, что автомобильные конструкторы ведущих фирм по-своему добиваются улучшения эксплуатационных характеристик данного вида трансмиссий. К примеру, Volkswagen широко применяет коробки передач DSG со сдвоенным сцеплением. Данная конструкция лишает автомобиль толчков при переключении. Тем же путем пошла компания Ford, представив свою коробку под названием PowerShift.
Данная конструкция лишает автомобиль толчков при переключении. Тем же путем пошла компания Ford, представив свою коробку под названием PowerShift.
Дальше всех в подобных разработках пошла фирма Opel. Она совместно с конструкторским бюро Ricardo изобрела коробки передач под названием Easytronic, главной особенностью который стал единый привод сцепления и выбора скоростей.
Такое конструкторское решение позволило устранить несостыкованность работы двух узлов и снизить вес КПП.
Заключение
Большинство автопроизводителей все чаще смещают внимание к производству автомобилей с автоматическими трансмиссиями.
Но здесь наблюдается уход от классической гидромеханики и поиск аналоговых конструкций. И данная тенденция – не просто погоня за модными тенденциями, а осознанный переход к комфортному управлению автомобилем.
И, самое главное, что роботизированные трансмиссии широко распространены именно в бюджетных автомобилях. Это означает, что производители нашли потребителя для технологичного и одновременно легко обслуживаемого агрегата.
Понравилась статья? Поделиться с друзьями:
Коробка робот — что это такое и чем отличается от коробки автомат
Если рассматривать ключевые отличительные черты автоматической коробки передач от робота, то они следующие: 1) Конструктивные отличие 2) В АКПП присуствует гидространсформатор, а в роботе сервоприводы. Немногие понимают, в чём заключается разница между роботом и автоматом, какие конструктивные различия между ними.Трансмиссии имеют ряд различных технических характеристик, свои положительные и отрицательные моменты.По этой причине однозначно отдать предпочтение какой-либо из них достаточно проблематично.
Содержание
- Роботизированная коробка передач
- Устройство, особенности и принцип работы роботизированной коробки передач
- Как научится ездить на роботизированной коробке передач? Основные особенности управления
Роботизированная коробка передач
Начинающие автовладельцы часто не понимают, что это такое – робот и чем отличается от обычного автомата. Дело в том, что РКПП это по сути механическая КПП, которой управляет электронный блок.
Дело в том, что РКПП это по сути механическая КПП, которой управляет электронный блок.
Роботизированная коробка передач в отличие от автомата делится еще на два подвида:
- Механическая коробка переключения скоростей с электронным блоком или простой робот. Этот тип был разработан первым, поэтому имел множество отрицательных сторон. Доходило в плоть до больших временных промежутках между переключением передач в АКПП автомобиля. Водитель чувствовал эти провалы, как вечные подергивания и толчки во время разгона.
- Та же коробка только с двумя системами сцепления или преселективная. Это более усовершенствованный первый тип РКПП. Устанавливается на гоночные транспортные средства. Два вала сцепления позволяют переключать скорости в момент работы еще предыдущей передачи.
ЧитатьЧем отличаются права на автомат от прав на механику Внимание! В самом начале робот стали производить, как замену автомату, для снижения затрат автовладельцев на ремонт. И бюджетные авто имеют электрические сервоприводы, а дорогие и спортивные машины гидравлические.
И бюджетные авто имеют электрические сервоприводы, а дорогие и спортивные машины гидравлические.
Бюджетные варианты роботов со вторым типом не очень удачны. Например, на Опель или Форд с РКПП, производители заменили гидронасосы на шаговые двигатели. В итоге, водитель постоянно чувствует рывки и задержки в переключении. Хотя, экспертами отмечено, что на той же Тойота Королла установлен аналогичный робот, а эти минусы отсутствуют.
Конструкция РКПП
По конструкции отличие робота от автомата заключается в следующем:
- два механических вала, которые находятся друг в друге. Каждый из них имеет собственное сцепление;
- актуатор или сервопривод: электрический или гидравлический. При использовании первого все исполнительные команды выполняют сервомеханизмы. Если присутствует гидромеханический блок, то он выполняет роль сцепления. В случае если установлен гидравлический привод, то он управляется посредством гидроцилиндров, которыми, в свою очередь, управляют клапаны электромагнита;
- электронный блок.
 Эта система контролирует механизмы исполнения и следит за датчиками КПП робота. Он совмещается с бортовым компьютером.
Эта система контролирует механизмы исполнения и следит за датчиками КПП робота. Он совмещается с бортовым компьютером.
В отличие от автоматической КПП передачи переключаются быстрее на роботе. Например, на DSG от Фольксвагена смена скоростей происходит за одну сотую секунду.
Отличить робот от автомата можно и по преимуществам, которые дает его использование и отрицательным сторонам.
ЧитатьКак управлять автоматической коробкой передач
Преимущества и недостатки
Роботы, установленные в машинах, имеют следующие плюсы:
- простые в обслуживании;
- экономичное потребление смазывающей жидкости из-за отсутствия гидротрансорфматора;
- мгновенное переключение скоростей;
- низкий расход топлива;
- высокая динамика.
Есть и недостатки у роботизированной системы:
- некачественное плавное переключение передач;
- водитель чувствует задержки при смене скоростей;
- непредсказуемость в поведении при тяжелых дорожных условиях;
- переход в нейтральное положение при каждой остановке;
- ресурс робота уменьшается при каждой пробуксовке.

Эксперты отмечают, что постоянное движение с пробуксовкой приводит к износу не только робота, но и двигателя. Поэтому РКПП больше всего предназначены для городского типа движения.
Устройство, особенности и принцип работы роботизированной коробки передач
Как уже было сказано выше, РКПП состоит из механической коробки передач, а также дополнительных устройств для выжима сцепления, выбора и переключения передачи. Данные устройства называются актуаторами (актуатор сцепления, актуатор выбора передачи). Также коробка «робот» имеет собственную систему управления, которая представляет собой ЭБУ коробкой и ряд электронных датчиков, взаимодействующих с блоком.
Получается, данный тип КПП представляет собой механическую коробку с автоматическим управлением и принципиально отличается от классического «автомата», а также бесступенчатого вариатора.
Роботизированная КПП, как и обычная МКПП, имеет сцепление, в ней не используется трансмиссионная жидкость ATF в качестве рабочей для управления и т. д. Добавим, что в современных «роботах» может быть как одно, так и два сцепления. В первом случае следует понимать однодисковый «робот», а во втором преселективную роботизированную коробку передач с двумя сцеплениями.
д. Добавим, что в современных «роботах» может быть как одно, так и два сцепления. В первом случае следует понимать однодисковый «робот», а во втором преселективную роботизированную коробку передач с двумя сцеплениями.
Если говорить об устройстве коробки — робот, можно выделить следующие базовые составные элементы:
- Коробка передач, которая по устройству напоминает «механику;
- Актуаторы (сервоприводы), отвечающие за выжим сцепления и включение передачи;
- Блок управления коробкой (микропроцессорный ЭБУ) и внешние датчики;
Давайте рассмотрим устройство РКПП на примере 6-и ступенчатой роботизированной коробки передач с двумя сцеплениями. Сама коробка похожа на МКПП, однако имеет сразу два ведущих вала. Если просто, эти валы расположены друг в друге (внешний вал имеет внутреннюю полость, куда вставлен еще один внутренний первичный вал).
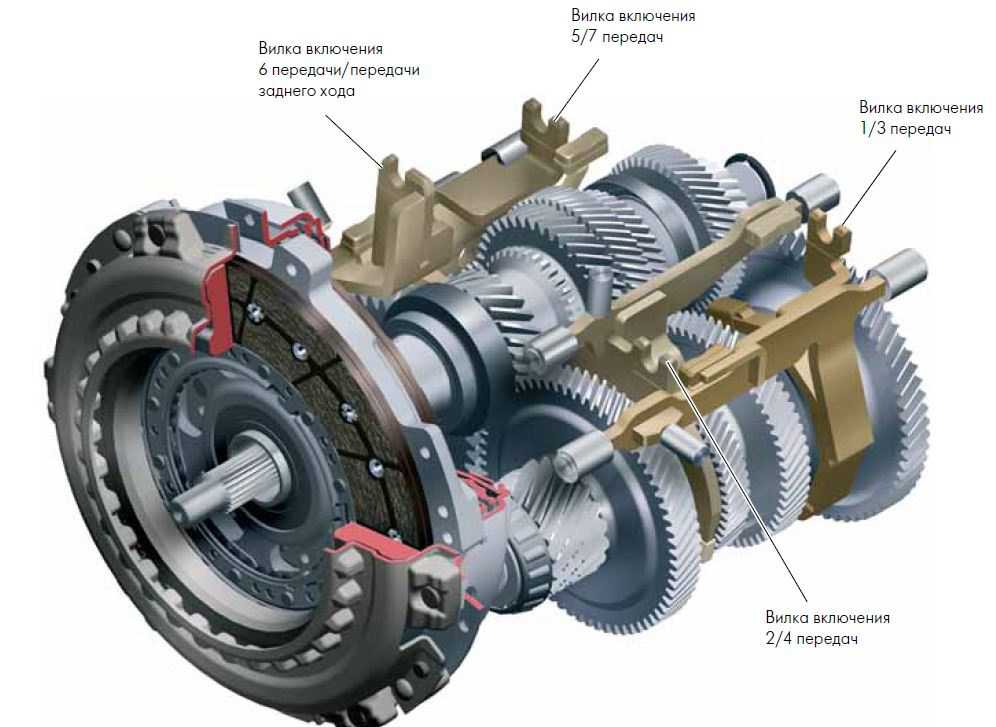
На внешнем валу установлены шестерни привода 2, 4 и 6 передачи. На внутреннем валу ставятся шестерни 1, 3, 5 передачи, а также передачи заднего хода. Для каждого из валов имеется отдельное сцепление.
Для каждого из валов имеется отдельное сцепление.
Актуаторы роботизированной коробки представляют собой электрические или гидросервоприводы. Электрический актуатор -электромотор с редуктором, гидравлический является гидроцилиндром, шток которого связан с синхронизатором. Главной задачей как первого, так и второго типа устройств становится механическое перемещение синхронизаторов КПП, а также включение и выключение сцепления.
Блок управления коробкой передач является микропроцессорным ЭБУ, к которому подключены внешние датчики, которые задействованы в ЭСУД автомобиля. Другими словами, контроллер коробки передач взаимодействует с датчиками от двигателя, а также ряда других систем (например, ABS и т.д.). Часто блок управления коробкой совмещен с ЭБУ двигателем, при этом коробка работает по собственному заданному алгоритму.
Как научится ездить на роботизированной коробке передач? Основные особенности управления
Чтобы не допустить появления неисправностей в работе трансмиссии, надо знать, как пользоваться роботом, а именно:
- как выполнять прогрев агрегата;
- как правильно начинать движения;
- как пользоваться трансмиссией при эксплуатации авто в режиме города.
Прогрев роботизированной коробки переключения передач и особенности эксплуатации
Многие производители авто утверждают, что роботизированные агрегаты не нуждаются в прогреве. Но в этом вопросе надо учитывать температуру рабочей жидкости в смазочной системе, а также как масло ведет себя в условиях мороза. Некоторые типы расходных материалов при низких температурах загустевают и собираются в нижней части агрегата. По стандарту процесс прогрева состоит в запуске двигателя и выжидании 2-3 минут. При прогреве автомобиля не нужно трогать рычаг КПП.
Если автомобиль находится в гараже, то выгонять его нужно спокойно и плавно, чтобы не допустить толчков и рывков. При прогреве надо следить за количеством оборотов, их число в идеале будет минимальным и составит около 1 тысячи в минуту. Выполнять прогрев агрегата следует и летом, благодаря этому все составляющие компоненты робота будут качественно смазаны. Выполнение прогрева позволит не допустить быстрого износа и стирания компонентов агрегата.
Основные особенности эксплуатации, которые позволят увеличить ресурс работы агрегата в целом:
- Нельзя допустить буксования при езде в мороз. Это приведет к быстрому износу исполнительных механизмов и узлов. Регулярное буксование станет причиной разкалибровки агрегата.
- Специалисты не советуют часто ездить по сильно заснеженным поверхностям. Транспортное средство может застрять, что в итоге станет причиной пробуксовок.
- В качестве зимней резины рекомендуется использовать изделия, оснащенные шипами. При установке на колеса обычных шин есть вероятность пробуксови на гололеде.
- При длительных простоях, составляющих несколько дней и более, селектор коробки передач рекомендуется устанавливать в положение Е. Мотор должен быть заглушен.
- Если состояние дороги плаченое, специалисты советуют начинать движение со второй скорости, но при этом сильно не газовать.
Об основных принципах управления роботизированной КПП на примере Лады Гранты рассказал Алексей Рыков.
Правила правильного старта на коробке робот
Владельцам машин, оборудованных роботизированными КПП, надо учитывать, что некоторые транспортные средства не имеют дополнительной опции помощи при старте. В частности, речь идет о начале движения на возвышенности, в гору. Поэтому важно правильно научиться трогаться с места. Процедура троганья выполняется так же, как на машине с механическим агрегатом.
Более подробно о начале езды:
- Рычаг стояночного тормоза должен быть поднят.
- Рычаг коробки передач устанавливается в режим А.
- Водитель легко, без усилий жмет на газ.
- Одновременно с этим отключается рычаг стояночного тормоза.
Если при начале езды на улице минусовая температура и высокая влажность, селектор коробки можно перевести в положение М1. Сила воздействия на педаль газа должна быть допустимой, чтобы не произошла перебуксовка. Если машина оборудована гироскопом, то при выборе автоматического режима микропроцессор агрегата сам выберет необходимую скорость и будет выполнять переключение.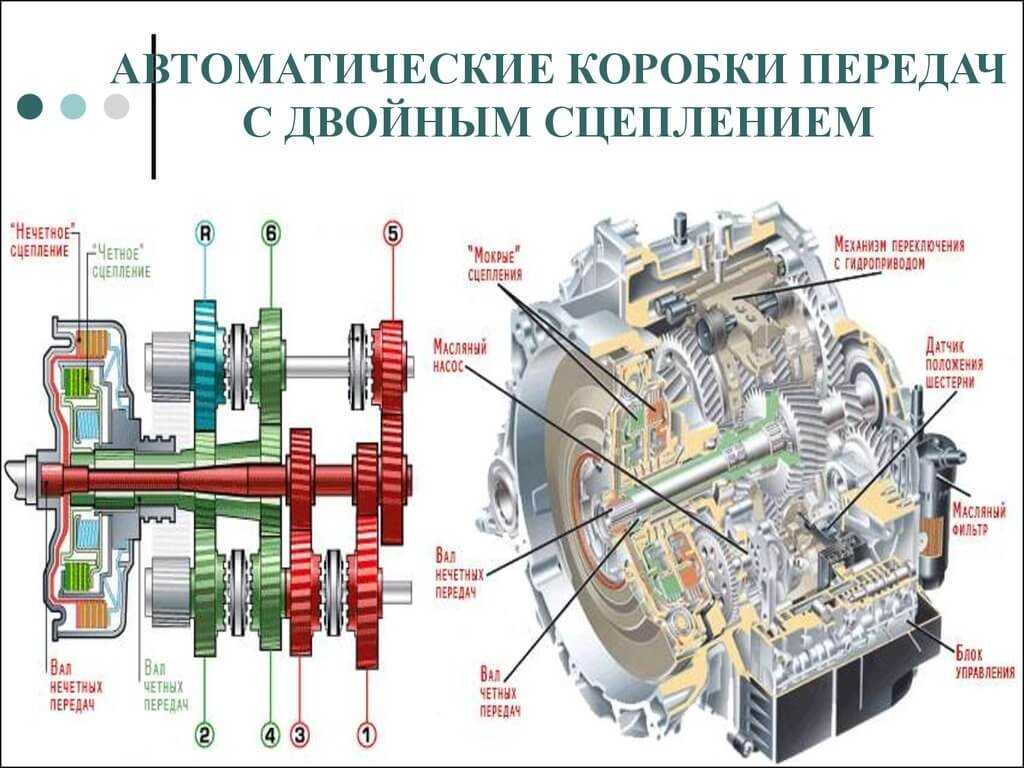 Это позволит переключаться скоростям на понижение. Если водитель опытный, то с учетом ситуации он может установить режим М при фиксации установленной передачи.
Это позволит переключаться скоростям на понижение. Если водитель опытный, то с учетом ситуации он может установить режим М при фиксации установленной передачи.
Если изначально устанавливается скоростной режим, то скорость передвижения не рекомендуется менять. Количество оборотов двигателя должно составить от 2500 до 5000 в минуту, но не за пределами этого диапазона. При начале езды на спуске селектор трансмиссии устанавливается в режим А и отключается рычаг ручного тормоза.
Эксплуатация роботизированной коробки передач в городских условиях
Регулярная эксплуатация автомобиля в режиме города и пробок может привести к быстрому износу компонентов трансмиссии. Для предотвращения этого при остановке машины следует переводить рычаг коробки передач в режим N. Затем производится активация стояночного тормоза и остановка мотора. Если остановки кратковременные, к примеру, в условиях пробок, то режим нейтрали можно не включать, достаточно остановиться, когда рычаг установлен в режим А. Если автомобиль простоит в пробке больше одной минуты, то двигатель надо будет остановить.
Если автомобиль простоит в пробке больше одной минуты, то двигатель надо будет остановить.
О тонкостях использования машин с установленным роботом рассказал Василий Костин.
Источники
Использованные источники информации при написании статьи:
- https://akppoff.ru/korobka-avtomat/korobka-robot-i-avtomat-v-chem-raznitsa
- http://krutimotor.ru/rkpp-robotizirovannaya-korobka-peredach-korobka-robot/
- https://avtozam.com/kpp/korobka-peredach-robot-chto-eto-takoe/
Слово робот происходит от Чешское слово для принудительного труда или крепостного. Он был представлен драматурга Карела Чапека, чей вымышленный робот изобретения были созданы химическими и биологическими, а не механические методы. В основном роботы состоит из:
Конструкция робота состоит в основном из корпус робота, включающий в себя руки и колеса. Некоторая сила например, электричество требуется, чтобы сделать руки и колеса поворот по команде. Один из самых интересных аспектов робота в целом является его поведение, которое требует форма интеллекта.
Двигатели Разнообразие электродвигателей обеспечивает
питание роботов, заставляя их двигаться с различными
запрограммированные движения. КПД двигателя
описывает, сколько электроэнергии потребляется
преобразуется в механическую энергию.
Двигатели постоянного тока. Постоянный магнит постоянного тока двигатели требуют только двух проводов и используют расположение неподвижные и электромагниты (статор и ротор) и переключатели. Они образуют коммутатор для создания движения через вращающееся магнитное поле.
Двигатели переменного тока. Эти двигатели включают мощность на входах, чтобы непрерывно перемещать поле.
Шаговые двигатели. Они как бесщеточный двигатель постоянного или переменного тока. Они двигают ротор на прикладывая мощность к различным магнитам в двигателе в последовательность (ступенчатая). Шаговые двигатели предназначены для точное управление и будет не только вращаться по команде, но и может вращаться с любым числом шагов в секунду (вплоть до их максимальная скорость).
Серводвигатели. Подробнее о двигателях
Механизмы Шестерни и цепи . Шестерни и цепи представляют собой механические детали, обеспечивающие механизм для передачи вращательного движения из одного места в другое с возможно менять по ходу. Изменение скорости между двумя шестернями зависит от количества зубьев на каждая передача. Шкивы и ремни. Шкивы и ремни, две другие простые машины используемые в роботах, работают так же, как шестерни и цепи. Шкивы представляют собой колеса с канавкой по краю, а ремни — это резиновые петли, которые входят в эту канавку. Коробки передач . Датчики Роботы работают по принципу измерения, требующие различных видов датчиков. А чувство времени обычно встроено через перцептивные аппаратное и программное обеспечение, которое быстро обновляется. Датчики взаимодействуют с внешней средой и преобразует энергию, связанную с происходящим измеряемые (звук, свет, давление, температура и т. в другую форму энергии. Обычные датчики, используемые в робототехника включает датчики света, сенсорные датчики, звуковые датчики и датчик ускорения. А
датчик звука устанавливается на уровне уха
робот для обнаружения голоса субъекта. Ан
датчик ускорения установлен в кузове
обнаруживать тряску.
Источник питания Как правило, питание обеспечивается два типа источников: батареи, которые используются только один раз а затем выбрасывается; и аккумуляторные батареи, которые работают в результате обратимой химической реакции и могут быть перезаряжался тысячу раз. Первое использование аккумуляторная батарея обеспечивает до 4 часов непрерывной работы работа в приложении. Система управления Существуют две основные системы управления роботы: логическая схема и микроконтроллер. Логическая схема Цифровая логическая схема управляет
механическая система. Цепь обычно связана с
механическая структура через мостовое реле . Микроконтроллер Микроконтроллеры умны электронные устройства, используемые внутри роботов. Они выполнять функции, аналогичные тем, которые выполняет микропроцессор (ЦП) внутри персонального компьютера. Микроконтроллеры медленнее и имеют меньше памяти, чем ЦП, но предназначены для решения реальных задач управления. Одно из основных различий между ЦП и микроконтроллеры — количество внешних компонентов необходимо для их эксплуатации. Микроконтроллеры могут работать без внешние детали, и обычно требуется только внешний кристалл или осциллятор. Существуют три основные характеристики
микроконтроллер для рассмотрения: скорость, размер и
Память. Скорость обозначается в тактах, а
обычно измеряется в миллионах циклов в секунду
(Мегагерц, МГц). Подключение к математике Конфигурация робота
|

 Сервоприводы простые постоянного тока
двигатели с редуктором и системой управления с обратной связью. Они
настроить себя, пока они не совпадают с сигналом. Сервоприводы
используются в радиоуправляемых самолетах и автомобилях.
Сервоприводы простые постоянного тока
двигатели с редуктором и системой управления с обратной связью. Они
настроить себя, пока они не совпадают с сигналом. Сервоприводы
используются в радиоуправляемых самолетах и автомобилях. Коробка передач работает по тому же принципу, что и коробка передач.
шестерня и цепь, без цепи. Примеры
коробки передач находятся на трансмиссии в автомобиле и
подача бумаги в принтер.
Коробка передач работает по тому же принципу, что и коробка передач.
шестерня и цепь, без цепи. Примеры
коробки передач находятся на трансмиссии в автомобиле и
подача бумаги в принтер.Как создаются промышленные роботы? Руководство по компонентам и движению манипуляторов роботов| XYZ
Одинаковы ли строения роботов и людей?
Роботы и люди имеют общие черты. Люди и механические роботы — какими бы противоположными они ни казались, на самом деле они имеют одну и ту же базовую структуру звеньев (костей) и суставов. Основной скелет промышленных роботов, состоящий в основном из манипуляторов, представляет собой комбинацию звеньев и соединений. По отношению к человеческому телу части, которые могут свободно сгибаться и двигаться, такие как локоть и плечо, являются суставами, а кости, соединяющие эти суставы, эквивалентны звеньям робота. Принцип движения суставов и передачи энергии через звенья является общим как для людей, так и для роботов.
Локоть и плечо человека — это суставы, а соединяющие их кости — звенья.
Роботы можно условно разделить на два типа в зависимости от организации их соединений: 1) последовательное соединение и 2) параллельное соединение. Человеческая рука классифицируется как последовательное звено, поскольку ее суставы — плечо, рука и запястье — расположены последовательно.
Промышленные роботы подразделяются на несколько категорий, таких как вертикальный шарнирный тип и горизонтальный шарнирный тип (манипулятор робота с селективной податливостью SCARA), в зависимости от движений суставов и конструкции. Дополнительную информацию см. в статье ниже.
Какие виды промышленных роботов существуют? Руководство по характеристикам основных 6 типов
В этой статье будет объяснено движение и внутреннее устройство промышленных роботов.
Сравнение движений робота и человека
Теперь давайте в качестве примера рассмотрим движение вертикального сочлененного типа, имеющего ту же механическую структуру, что и человеческая рука.
Робот с вертикальным шарниром представляет собой промышленный робот со структурой последовательной связи. Обычно он состоит из шести суставов (6 осей).
На следующем рисунке показано сравнение движения робота и человека.
Оси с 1-й по 3-ю — это талия и рука, а оси с 4-й по 6-ю — от запястья до кончиков пальцев. Первые три оси переносят запястье в определенное положение, а следующие три оси свободно перемещают запястье. Эта 6-осевая конструкция позволяет роботам свободно двигаться, как и людям.
Давайте проверим реальные движения на видео.
Все оси, от первой до шестой, двигаются как человек.
Что нужно для движения суставов?
Далее давайте подробно рассмотрим внутреннюю структуру промышленных роботов.
На приведенном ниже рисунке показана конструкция универсального робота малой и средней полезной нагрузки серии R от Kawasaki Heavy Industries или Kawasaki. Эта серия R используется в широком диапазоне областей, таких как сборка электронных устройств и дуговая сварка. Поскольку кабели и жгуты могут быть встроены внутрь манипулятора, можно избежать помех периферийному оборудованию, и робот может работать в небольшом пространстве. Его отличительной чертой является быстрая работа, которая может соответствовать проворным движениям.
На этом рисунке видно, что робот состоит из множества разных частей. Среди этих частей четыре особенно важные: привод, редуктор, энкодер и трансмиссия, каждая из которых будет объяснена отдельно.
Привод
Привод — это компонент, выполняющий функции шарнира робота, который позволяет роботу перемещать руку вверх и вниз или вращаться, а также преобразовывать энергию в механические движения. Может быть трудно понять эту концепцию, но подумайте о двигателях в качестве примера. Точки, отмеченные красными кружками на рисунке ниже, являются положением двигателей серии R.
Однако, если это простой двигатель, такой как те, которые используются в комплектах пластиковых моделей, невозможно выполнить точную операцию, которая требует точных движений и точности, например, 0,01 мм. Поэтому для промышленных роботов используется высокофункциональный двигатель, называемый серводвигателем, который может управлять положением и скоростью.
Наиболее распространенным источником энергии для приводов является электричество, но также может использоваться гидравлическая и пневматическая энергия. Некоторые приводы с гидравлическим приводом уникальны тем, что они могут генерировать большую мощность и устойчивы к ударам.
Редуктор
Редуктор — это устройство для увеличения мощности двигателя. Один только двигатель ограничен по мощности, которую он может выдавать. Для получения большой мощности двигатели в основном используются в сочетании с этим редуктором. Области, обведенные синим цветом на следующем рисунке, представляют собой редукторы.
Если объединить зубчатые колеса с разным количеством передач и уменьшить скорость вращения двигателя в 10 раз, мощность двигателя увеличится в 10 раз. Это тот же принцип, что и в велосипедной трансмиссии. Велосипеды имеют разные по размеру шестерни на переднем и заднем колесе. Как правило, трансмиссия используется для переключения передач заднего колеса. Когда выбрана большая передача и количество оборотов колеса сведено к минимуму, крутить педали становится легче за счет скорости, но даже ехать вверх по крутым склонам становится намного легче. Другими словами, выходная мощность может быть увеличена.
Энкодер
Энкодер — это устройство, которое указывает положение (угол) вращающегося вала двигателя. Имея энкодер, он может предоставить осязаемые данные о том, в каком направлении и сколько движется робот. У обычных оптических энкодеров диск прикреплен к вращающемуся валу двигателя. Диск имеет прорези через равные промежутки времени для пропускания света, а по обеим сторонам диска расположены светоизлучающие диоды (СИД) и светоприемные элементы (фотодиоды) для различения интенсивности света (светлый и темный).
Когда двигатель вращается, свет либо проходит через щели, либо блокируется, поэтому угол поворота и скорость можно определить, считывая сигналы. Это позволяет серводвигателям точно контролировать позиционирование и скорость.
Трансмиссия
Трансмиссия — это компонент, передающий мощность, генерируемую исполнительными механизмами и редукторами. Трансмиссия также способна изменять направление и величину мощности. Как и прежде, рассматривая велосипед в качестве примера, цепь, соединяющая кривошип с задним колесом, является трансмиссией. Велосипеды приводятся в движение, принимая вращательное движение от педалей и передавая его на заднее колесо с помощью трансмиссии.
Эта идея также применима к конструкции робота. Двигатель, используемый в роботах, обычно размещается рядом с суставами, но его также можно разместить вдали от суставов с помощью передаточных механизмов, таких как ремни и шестерни. Например, в запястье роботов серии R, поскольку двигатель может быть установлен на локтевой части руки с помощью проводящего механизма, возможно компактное запястье.
Добавление функций с помощью сменного концевого зажима
Люди могут выполнять различные задачи с помощью инструментов. В случае с промышленными роботами замена устройства, прикрепленного к их запястью, делает роботов очень универсальными и позволяет им выполнять различные работы. Это устройство называется «концевой эффектор», и существует множество готовых к использованию устройств, включая руки для подъема предметов, вакуумные (всасывающие) типы, а также инструменты для сварки и покраски. Робот может выполнять очень широкий спектр работ, сочетая гибкое движение, реализуемое валами роботов, и специальные концевые эффекторы.
В этой статье подробно описана базовая структура промышленных роботов, и из нее мы узнали о компонентах, из которых построена конструкция, — где они расположены и какую роль играют.