
Планетарный редуктор: устройство, принцип работы, виды
Аналоги мировых брендов. Подробнее>>
Из чего состоит планетарная передача
Планетарным редуктором называется один из типов механических редукторов. Этот широко распространённый во многих отраслях тип редукторов основан на планетарной передаче. Планетарная передача представляет собой зубчатый механизм, характерной особенностью которого является то что оси некоторых зубчатых колёс являются подвижными.
Наиболее популярная разновидность планетарной передачи состоит из следующих элементов:
- Солнечная шестерня – малое зубчатое колесо с внешними зубьями, располагающееся в центре механизма
- Коронная шестерня (эпицикл) – большое зубчатое колесо с внутренними зубьями
- Водило – эта деталь планетарной передачи механически соединяет все сателлиты. Именно на водиле установлены оси вращения сателлитов.

- Сателлиты – малые зубчатые колёса с внешними зубьями, располагающиеся между солнечной и коронной шестернёй. Сателлиты находятся в одновременном зацеплении и с солнечной и с коронной шестернёй.

Как работает планетарный редуктор
Работа планетарной передачи простейшей конструкции в случае остановленного эпицикла происходит следующим образом. Во вращение приводится солнечная шестерня. Вместе с ней начинают поворачиваться сцепленные с ней сателлиты. По мере того как сателлиты поворачиваются, они перекатываются по солнечной шестерне и по эпициклу. Тем самым они перемещаются вокруг солнечной шестерни, приводя во вращение водило, на котором закреплены оси сателлитов.
Конструкция планетарного механизма позволяет работать не только с остановленным эпициклом, используя в качестве входа солнечную шестерню, а в качестве выхода – водило. Из трёх перечисленных элементов: солнечная шестерня – водило – эпицикл любые два можно использовать как вход или как выход, а оставшийся третий – затормозить.
Если в планетарном механизме вращаются, и солнечная шестерня и водило и эпицикл, то механизм начинает работать как дифференциал, позволяя производить сложение угловых скоростей на разных входах или их разложение угловой скорости на два различных выхода.
От планетарной передачи к планетарному редуктору
На практике планетарная передача используется как основной элемент для построения планетарных редукторов. В состав редуктора помимо самой передачи входят корпус, опорные подшипники, входной и выходной вал (или иные элементы для подключения вала двигателя и вала нагрузки).
Поскольку передаточное отношение планетарной передачи описанной конструкции чаще всего находится в диапазоне от 3 до 7, то для получения более высоких передаточных отношений применяют последовательное соединение нескольких планетарных механизмов. Получившийся в результате многоступенчатый редуктор может иметь передаточное отношение до нескольких тысяч и даже десятков тысяч.
Получившийся в результате многоступенчатый редуктор может иметь передаточное отношение до нескольких тысяч и даже десятков тысяч.
Варианты планетарного редуктора: отличия друг от друга
Планетарные редукторы имеют большое количество разновидностей, отличающихся друг от друга по самым различным признакам. Отличия могут заключаться в конструктивной схеме – несколько солнечных шестерён, водил или эпициклов, вместо одной солнечной шестерни, одного водила и одного эпицикла в простейшем варианте редуктора. В некоторых вариантах редукторов плоскости вращения различных планетарных колёс могут быть не параллельны друг другу (пространственные планетарные механизмы).
Для построения планетарного редуктора могут быть использованы различные виды зубчатых колёс: прямозубые, косозубые, шевронные, конические. Использование каждого из этих видов зубчатых колёс может придать редуктору особенные свойства. Например, косозубые зубчатые колёса могут быть использованы для построения малошумных редукторов.
Количество сателлитов также может изменяться. Обычно используется от трёх (наиболее распространённый вариант) до шести сателлитов (выходные ступени компактных высоконагруженных редукторов). Форма сателлитов также может быть различной – например двухвенцовые зубчатые колёса в планетарных редукторах, построенных по сложным конструктивным схемам или разрезные подпружиненные зубчатые колёса в редукторах с пониженным люфтом.
Отличие планетарного редуктора от других редукторов
Планетарный редуктор имеет небольшой диаметр если сравнивать редукторы разных типов, рассчитанные на одинаковый номинальный момент. При этом осевая длина планетарных таких редукторов как правило больше чем у других типов редукторов.
В стандартных конструкциях планетарных редукторов доступен широкий ассортимент передаточных чисел (например, до шести тысяч в случае планетарных редукторов maxon motor) в отличие, например, от волновых редукторов (от 30 до 160 в стандартных моделях).
Среди планетарных редукторов можно найти модели с самым разным люфтом: от нескольких градусов для моделей стандартного исполнения до особо низколюфтовых редукторов специальной конструкции (например, планетарные редукторы Harmonic Drive). С одной стороны, это позволяет им быть более точными чем распространённые модели рядных редукторов, с другой стороны они не достигают точности волновых редукторов.
С одной стороны, это позволяет им быть более точными чем распространённые модели рядных редукторов, с другой стороны они не достигают точности волновых редукторов.
Нельзя добавить товар к сравнению. Вы уже добавили к сравнению товар из категории « XXX». Очистите список сравнения и попробуйте ещё раз.
Товар успено добавлен в корзину
Ваш город
- Москва
- Санкт-Петербург
- Новосибирск
- Екатеринбург
- Казань
- Нижний Новгород
- Челябинск
- Самара
- Омск
- Ростов-на-Дону
- Уфа
- Красноярск
- Воронеж
- Пермь
- Волгоград
- Краснодар
- Саратов
- Тюмень
- Тольятти
- Ижевск
- Барнаул
- Ульяновск
- Иркутск
- Хабаровск
- Ярославль
- Владивосток
- Махачкала
- Томск
- Оренбург
- Кемерово
Извини, ничего не нашлось
Ваш заказВаша корзина пуста
Спасибо, ваше сообщение отправлено.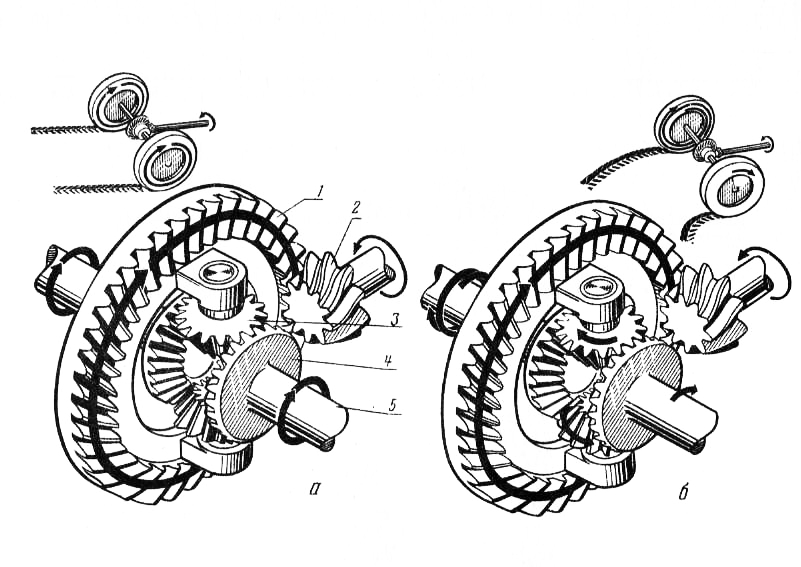
Перезвонить мне
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Напишите нам
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Сайт использует cookies для вашего удобства. Политика конфидинциальности и Правила использования. Принять
Политика конфиденциальности
Самоблокирующийся дифференциал УАЗ Редукторный (военный) мост «AVT»
Отличительные особоенности блокировок AVT:
Коэффициент блокирования — 75% — 80%, (у аналогов обычно — 50% — 70%)
10 сателлитов внутри, пара дополнительных сателлитов дает прирост трения в 20%.
Сателлиты расположены более равномерно
Вместе с блокировкой для УАЗ в комплекте идёт кольцо.
Возможно изготовление блокировки с любым преднатягом по желанию заказчика (от 0 кг. до 10 кг.)
Блокировки AVT теряют преднатяг медленнее, чем известных аналоги
Полностью отсутствуют люфты.
Гарантия: 12 месяцев с момента продажи и 18 месяцев с момента изготовления.
С кольцом — гражданский мост.
Без кольца — мост Спайсер.
Самоблокирующиеся дифференциалы винтового типа
Высокий ресурс и отсутствие проблем при установке делают самоблокирующиеся винтовые дифференциалы наиболее распространенными. Относительно несложная конструкция делает их доступными и практически не требует технического обслуживания.
Для предупреждения повышенного износа трансмиссии винтовая блокировка имеет сглаженный процесс включения и выключения. Также в момент включения блокировки дополнительное толчковое усилие не передается на рулевое колесо. Однако необходимо учесть, что при включении устройства возникают кратковременные пиковые нагрузки.
Установка самоблокирующегося дифференциала увеличивает на скользкой дороге устойчивость автомобиля и повышает его проходимость. Оптимальное перераспределение крутящего момента между ведущими колесами позволяет разгрузить буксующее колесо и дает колесу, имеющему лучшее сцепление дополнительный крутящий момент.
Для чего нужна блокировка дифференциала?
Во время движения автомобиля по неровной дороге или в момент поворота на детали трансмиссии и шины подается дополнительная нагрузка из-за прохождения ведущими колесами различного пути. Это обстоятельство ухудшает управляемость и способствует их существенному износу. В эпоху отсутствия автомобильных дорог и малых скоростей данная проблема не сильно беспокоила водителей, к тому же цельная ведущая ось служила для повышения проходимости автомобиля.
Шло время, пропорционально совершенствованию техники возрастали скорости, поэтому возникла необходимость развязать ведущие колеса. Был придуман дифференциал — планетарный механизм, который распределял поровну крутящий момент между полуосями и позволял колесам вращаться с различной скоростью.
Дифференциал значительно увеличил (улучшил) управляемость и устойчивость автомобиля, но при этом снизил его проходимость. Величину крутящего момента стало задавать колесо, имеющее менее прочное сцепление с дорогой, поэтому одно колесо пробуксовывало, второе в этот момент просто останавливалось.
Ручная блокировка дифференциала не смогла решить проблему улучшения проходимости автомобиля, так как это требовало постоянного внимания водителя и годилось только для преодоления труднопроходимых участков. Поэтому возникла необходимость автоматической блокировки. Всевозможные конструкции самоблокирующихся дифференциалов не требуют дополнительных действий от водителя и помогают компенсировать ошибки в управлении.
Автомобиль, имеющий винтовую блокировку:
- быстро разгоняется по плотному снегу и льду
- легко управляется в поворотах
- при резком старте на асфальте предупреждается срыв ведущих колес
Для выравнивания срабатывания блокировки и уменьшения нагрузки на трансмиссию устанавливают муфту предварительного натяга. Величина преднатяга определяет минимальный крутящий момент, который действует на колесо. Больший преднатяг позволяет повысить проходимость на труднопроходимых участках дороги, меньший — помогает проходить резкие повороты. Установить необходимую величину натяга могут только специалисты, которые учитывают все особенности конструкции автомобиля, манеру вождения и уровень дорожного покрытия.
Предлагаем инновационную продукцию, по своим качествам превосходящую все конкурентные предложения, — блокиратор дифференциала (дифференциал повышенного трения) с десятью сателлитами
Число сателлитов в дифференциале увеличивает срок эксплуатации узла. Десяти сателлитная конструкция создаёт больше точек касания сателлитов — полуосевых шестерен. Это способствует более равномерному распределению и снижению нагрузок на отдельный саттелит и большей площади трения.
Нет характеристик.
Traxxas Планетарная передача дифференциала (в сборе) (2388)
Популярные категорииСуперраспродажиРаспродажа/РаспродажаОтдел запчастейГрузовики на радиоуправленииРадиоуправляемые автомобилиРадиоуправляемые вертолеты/дроныРадиоуправляемые катераСамолет на радиоуправлении
Поиск
(пока отзывов нет)
TRAXXAS
Дифференциал планетарной передачи Traxxas (в сборе), 2388
Рейтинг Обязательно Выберите рейтинг1 звезда (худший)2 звезды3 звезды (средний)4 звезды5 звезд (лучший)
Имя
Электронная почта Обязательно
Тема отзыва Обязательно
комментариев Обязательно
Самые низкие цены на запчасти в Интернете!
Розничная цена:
$14.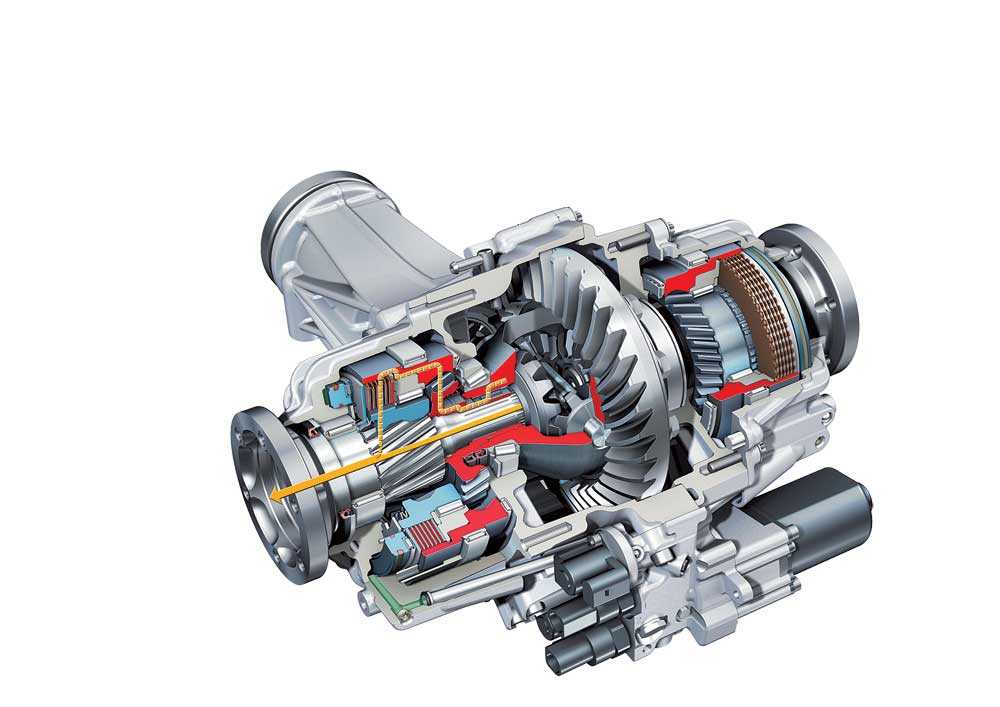 00
00
(Вы экономите $2.00 )
- Код продукта:
- ТРА2388
- СКП:
- 020334238801
- Наличие:
- В НАЛИЧИИ
Этот товар подходит для БЕСПЛАТНАЯ ДОСТАВКА!
Текущий запас:
Количество: 1 2 3 4 5 6 7 8 910 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 2930
- Что тебе нужно знать
Это полный дифференциал планетарной передачи для Traxxas Bandit, Stampede и Rustler.
ПЛАНЕТАРНЫЙ ДИФФЕРЕНЦИАЛ И СЕРВОПРИВОД СКОРОСТИ
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
1. Область техники
Изобретение относится к планетарным дифференциалам и устройствам для управляемого перемещения объекта.
2. Описание известного уровня техники
В типичных планетарных дифференциалах зубчатые колеса используются для обеспечения необходимой дифференциации между входами и выходами. Эти шестерни имеют множество недостатков. Они чувствительны к износу и должны часто проверяться. Они имеют относительно высокие потери на трение и, следовательно, для получения заданной производительности должны быть обеспечены относительно более высокие входы. Что еще более важно, они должны быть изготовлены с жесткими допусками и, следовательно, дороги.
Кроме того, в системах, требующих бесшумной работы, шум планетарного дифференциала, в котором используются обычные солнечные и планетарные шестерни с зубьями, часто недопустим.
В прошлом шарикоподшипники использовались в редукторных механизмах для преодоления ограниченного пространства. Такой механизм показан в «Гениальные механизмы для дизайнеров и изобретателей», Vol. IV, гл. 12, стр. 279-81, Джон А. Ньюэлл и Холбрук Л. Хортон (Industrial Press, 1967). Он включает в себя шариковый подшипник, одна дорожка которого приводится в движение, а другая дорожка соединена с рамой двигателя. Выходная мощность берется из шаровой клетки. Двухвходовое дифференциальное действие отсутствует.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является преодоление вышеупомянутых недостатков.
Еще одной задачей является создание улучшенного планетарного дифференциала.
Еще одной задачей является создание системы, включающей планетарный дифференциал для управляемого перемещения объекта.
Еще одной целью является поддержание желаемого движения объекта путем обнаружения чрезмерного и недостаточного движения объекта и обеспечения корректирующих действий посредством планетарного дифференциала.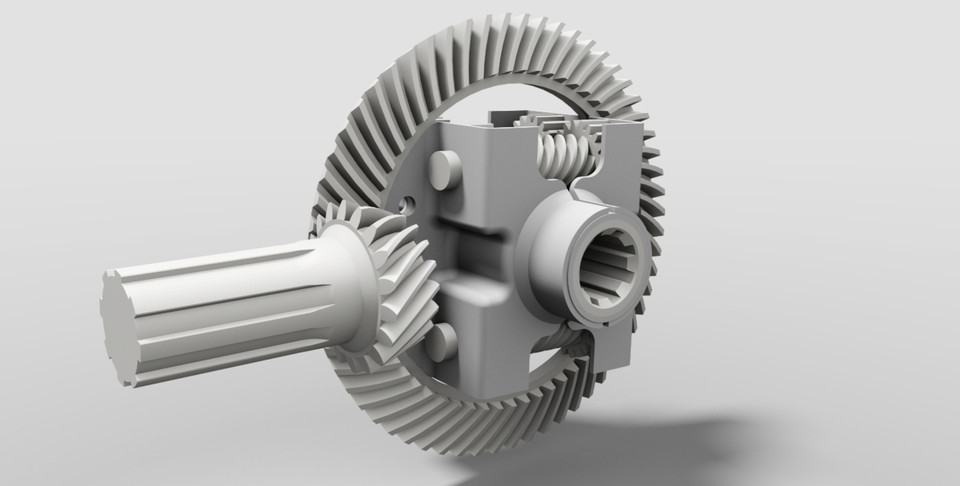
Другие цели настоящего изобретения станут очевидными в дальнейшем ходе этого раскрытия.
С одной стороны, это изобретение относится к планетарному дифференциалу, содержащему в комбинации продольный вал, имеющий суженную часть, по меньшей мере два шарика, непосредственно взаимодействующие с продольным валом указанной суженной части, образуя внутреннюю обойму для шариков, внешнюю обойму для шарики, имеющие конус, зацепляемый указанными шариками, сепаратор для шариков, первое вращающееся средство ввода, соединенное с одним из внутреннего кольца, внешнего кольца и сепаратора, второе вращающееся средство ввода, соединенное с другим из внутреннего кольца, внешнего кольца и сепаратора, вращающееся выходное средство, соединенное с еще одним внутренним кольцом, внешним кольцом и сепаратором, и средство для установки дорожек для вращательного движения.
С другой стороны, предметом изобретения является устройство для управляемого перемещения объекта, содержащее в сочетании продольный вал, имеющий суженную часть, по меньшей мере два шарика, непосредственно взаимодействующие с указанным продольным валом суженной части, образуя внутреннюю обойму для шарики, внешнее кольцо для шариков, имеющее конус, зацепляемый указанными шариками, сепаратор для шариков, средства для установки колец для вращательного движения, первое приводное средство, соединенное с одним из внутреннего кольца, внешнего кольца и сепаратора, второе приводное средство соединенное с другим внутренним кольцом, внешним кольцом и сепаратором, средство для соединения объекта для движения с еще одним внутренним кольцом, внешним кольцом и сепаратором и средство, соединенное с первым средством привода, для выборочной подачи питания на первое средство движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение и его цели станут более очевидными из следующего подробного описания предпочтительных вариантов его осуществления, проиллюстрированных в качестве примера на прилагаемых чертежах, на которых:
РИС. 1 представляет собой вид сбоку с частичным разрезом устройства, которое включает в себя планетарный дифференциал для управляемого перемещения объекта в соответствии с предпочтительным вариантом осуществления изобретения;
РИС. 2 — вид по линии 2-2 на фиг. 1;
РИС. 3 представляет собой вид планетарного дифференциала и сервопривода скорости при предполагаемом использовании в системе кинопроекции.
Одинаковые ссылочные позиции на чертежах обозначают одинаковые или функционально эквивалентные детали.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Сервопривод 10 планетарной передачи показан на ФИГ. 1 и 2, используемое в устройстве, которое управляемо перемещает полотно материала 11. Сервопривод 10 включает в себя планетарный дифференциал 12, состоящий из двух шариков 14 и 15, внутреннего кольца 17 для шариков, внешнего кольца 18 для шариков, сепаратора. 20 для шариков и корпус 22 для установки обойм вращательного движения.
20 для шариков и корпус 22 для установки обойм вращательного движения.
Согласно изобретению внутренняя обойма 17 имеет форму вала (далее именуемого валом 17). Вал 17 имеет коническую или суженную часть или канавку 24, нижняя часть 27 которой изогнута по радиусу, немного большему, чем радиус каждого из шариков 14 и 15. Это обеспечивает плавное качение шариков вокруг вала 17. Как видно на фиг. 1, вал имеет свободный конец 117, проходящий в полость 118 во внешнем кольце 18, которое, таким образом, образует подшипник для свободного конца вала. Клетка 20 выполнена за одно целое со шкивом 25 и содержит шарики 14 и 15, удерживая их на расстоянии друг от друга.
Эти компоненты показаны в разрезе на РИС. 2. Шарики 14 и 15 контактируют с конической частью 24 вала 17. Кроме того, шарики контактируют с конической частью 28 внешней обоймы 18.
На фиг. 1, пластинчатая пружина 21 прикреплена к корпусу 22 с помощью винта 23. Пружина 21 воздействует на шарик 26, вызывая осевую нагрузку на вал 17 по направлению к подшипнику, образованному полостью 118 во внешнем кольце 18. Это дает желаемый эффект: нагрузку шариков на коническую часть 28 внешней обоймы 18. Конусность обеспечивает механическое преимущество по отношению к нагрузке, прикладываемой пружиной 21. Таким образом, регулируя степень конусности или силу пружины 21, фрикционный контакт, необходимый для привод наружного кольца 18 получается.
Это дает желаемый эффект: нагрузку шариков на коническую часть 28 внешней обоймы 18. Конусность обеспечивает механическое преимущество по отношению к нагрузке, прикладываемой пружиной 21. Таким образом, регулируя степень конусности или силу пружины 21, фрикционный контакт, необходимый для привод наружного кольца 18 получается.
Первый вращательный вход осуществляется через шкив 25, который составляет одно целое с клеткой 20.
В процессе работы первый вращательный вход обеспечивается ремнем 32 от двигателя 33. Ремень приводит в движение шкив 25, который составляет одно целое с клеткой 20. Сепаратор 20 приводит в движение шарики 14 и 15, которые вращают внешнее кольцо 18 за счет фрикционного контакта. Необходимое приводное трение создается пружиной 21, которая прижимает вал 17 к шарикам 14 и 15.
Второй вращательный вход обеспечивается ремнем 35 от двигателя 36, который приводит в движение шкив 30. Шкив 30 закреплен на валу 17 винтом 34. Вращение вала 17 вызывает вращение наружного кольца 18 за счет фрикционного контакта с шариками 14 и 15.
Таким образом, входные сигналы на шкивах 25 и 30 определяют скорость вращения внешней обоймы 18.
Выходной сигнал поступает от внешней обоймы 18 через вал 31, который соединен с внешней обоймой. Ролик 40, по которому проходит полотно 11 материала, соединен с валом 31. Ролик 41 прижимает полотно 11 к валку 40 с помощью смещающей пружины 43, соединенной с рычагом 44 валика. Таким образом, валик 40 служит для привода перемычка 11.
Специалисты в данной области техники легко поймут, что настоящее изобретение не ограничено ни одним из следующих аспектов: Входы или выходы могут подаваться или отводиться либо от внутренней обоймы, внешней обоймы, либо от сепаратора. Кроме того, количество используемых шариков ограничено только физическими размерами внутренней обоймы. И внутренняя обойма не обязательно должна иметь форму вала.
РИС. 3 показана типичная проекционная система, в которой могут использоваться планетарный дифференциал и сервопривод скорости. Ремень 32 (см. рис. 1) приводит в движение шкив 25, который составляет единое целое с клеткой 20. Клетка 20 приводит в движение шарики 14 и 15, которые вращают внешнее кольцо 18, встроенный вал 31 и ролик 40.
рис. 1) приводит в движение шкив 25, который составляет единое целое с клеткой 20. Клетка 20 приводит в движение шарики 14 и 15, которые вращают внешнее кольцо 18, встроенный вал 31 и ролик 40.
Пленка 51 из подающая катушка 52 зажимается между подпружиненным роликом 41 и приводным роликом 40. Затем пленка наматывается на ролик 61 и в проектор 54. Соотношения рассчитаны таким образом, чтобы номинальная скорость пленки была равна скорости проецирования (кулачка или звездочки). .
Петля 55 в пленке 51 должна быть сохранена, чтобы обеспечить свободное движение когтя или звездочки, тем самым изолируя сам проектор от нагрузок на катушке. Это достигается с помощью датчика 60 натяжения пленки, который состоит из ролика 61, вокруг которого сформирована петля 55, рычага 62, пружины 63 и переключателя 64 типа реверсирования полярности.
Если скорость подачи пленки слишком мала, петля 55 уменьшится в размерах, а рычаг 62 подтянется к пружине 63, замыкая верхний набор контактов переключателя 64.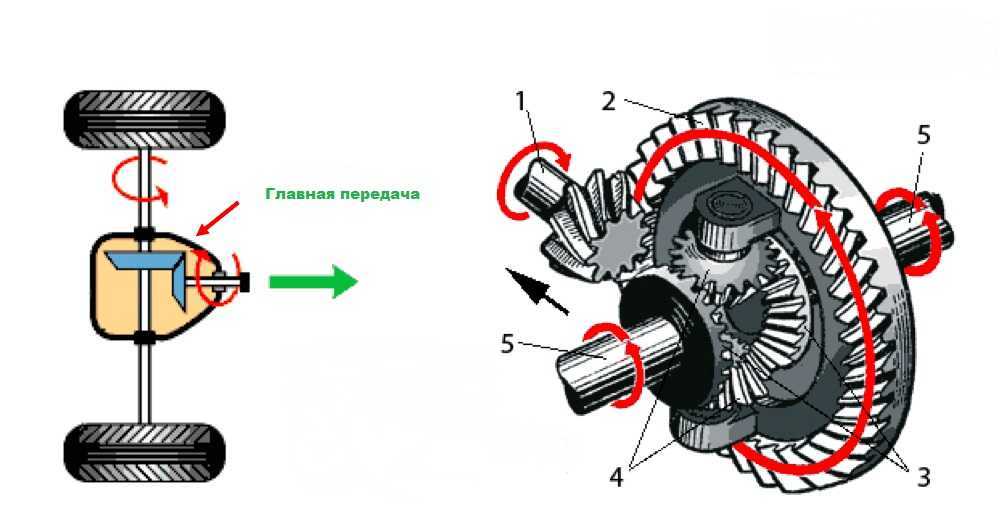 Это приводит к тому, что магнитный двигатель 36 получает питание от источника электроэнергии 66 в направлении вращения, необходимом для корректировки скорости пленки и восстановления петли 55. Серводвигатель 36 приводит в движение ремень 35, который вращает шкив 30. Шкив 30 закреплен на валу 17, контактирующем с шариками 14 и 15. шарики 14 и 15 приводят в движение внешнюю обойму 18, встроенный вал 31 и ролик 40. Таким образом, при подаче питания на двигатель 36 корректирующий вращательный вход добавляется через планетарный дифференциал к вращательному входному сигналу, подаваемому двигателем 33 проектора. Таким образом, внешний беговая дорожка 18 и, следовательно, приводной ролик 40 пленки ускоряются, позволяя датчику 60 натяжения пленки вернуться в его номинальное положение. В этом положении переключатель 64 разомкнут, а двигатель 36 обесточен.
Это приводит к тому, что магнитный двигатель 36 получает питание от источника электроэнергии 66 в направлении вращения, необходимом для корректировки скорости пленки и восстановления петли 55. Серводвигатель 36 приводит в движение ремень 35, который вращает шкив 30. Шкив 30 закреплен на валу 17, контактирующем с шариками 14 и 15. шарики 14 и 15 приводят в движение внешнюю обойму 18, встроенный вал 31 и ролик 40. Таким образом, при подаче питания на двигатель 36 корректирующий вращательный вход добавляется через планетарный дифференциал к вращательному входному сигналу, подаваемому двигателем 33 проектора. Таким образом, внешний беговая дорожка 18 и, следовательно, приводной ролик 40 пленки ускоряются, позволяя датчику 60 натяжения пленки вернуться в его номинальное положение. В этом положении переключатель 64 разомкнут, а двигатель 36 обесточен.
И наоборот, если скорость подачи пленки слишком велика, датчик натяжения пленки 60 действует в противоположном направлении и обратная полярность подается на двигатель 36 через нижние контакты переключателя 64. В этом случае обратный вход двигателя 36 через планетарный дифференциал 12 будет вычитаться из входного сигнала двигателя 33 привода проектора. Следовательно, результатом будет замедление скорости приводного ролика 40 пленки до тех пор, пока датчик натяжения пленки снова не вернется в свое номинальное положение.
В этом случае обратный вход двигателя 36 через планетарный дифференциал 12 будет вычитаться из входного сигнала двигателя 33 привода проектора. Следовательно, результатом будет замедление скорости приводного ролика 40 пленки до тех пор, пока датчик натяжения пленки снова не вернется в свое номинальное положение.
Следует признать, что хотя переключатель 64 показан как электромеханический переключатель, этот переключатель может быть одним из бесконтактных типов (фотоэлектрический или магнитный), который не требует передачи механической силы для приведения в действие.
Следует также отметить, что двигатель 36 имеет небольшие размеры, поскольку он обеспечивает мощность только для устранения ошибки скорости в системе. Например, можно использовать магнитный двигатель, в котором изменение полярности приводит к изменению направления вращения. Без ограничений по магнитному или постоянному току. двигателей, так как вместо них могут использоваться другие реверсивные приводы.
Кроме того, видно, что система обратима. Реверсивный приводной двигатель 33 проектора, который меняет направление ремня 32 и пленки 51, заставляет систему работать в обратном направлении. Если скорость перемотки слишком мала, петля 55 будет увеличиваться в размерах, вызывая замыкание нижнего набора контактов переключателя 64. Теперь это возбуждает двигатель 36 таким образом, что его вращательный вход через планетарный дифференциал 12 будет добавляться к входному сигналу приводного двигателя 33 проектора. Следовательно, приводной ролик 40 пленки будет увеличивать скорость, вызывая провисание в петле 55. пока датчик 60 натяжения пленки не вернется в исходное положение.
Реверсивный приводной двигатель 33 проектора, который меняет направление ремня 32 и пленки 51, заставляет систему работать в обратном направлении. Если скорость перемотки слишком мала, петля 55 будет увеличиваться в размерах, вызывая замыкание нижнего набора контактов переключателя 64. Теперь это возбуждает двигатель 36 таким образом, что его вращательный вход через планетарный дифференциал 12 будет добавляться к входному сигналу приводного двигателя 33 проектора. Следовательно, приводной ролик 40 пленки будет увеличивать скорость, вызывая провисание в петле 55. пока датчик 60 натяжения пленки не вернется в исходное положение.
Если скорость перемотки пленки слишком высока, петля 55 уменьшится в размерах, верхние контакты переключателя 64 замкнутся, и к двигателю 36 будет применена обратная полярность. Это приводит к уменьшению скорости пленки из-за вычитания ввод двигателя 36 через планетарный дифференциал до тех пор, пока датчик натяжения пленки снова не вернется в номинальное положение.