
Способ передачи крутящего момента ведущему колесу шасси
Авторы патента:
Дядченко Николай Петрович (RU)
F16h23 — Фрикционные передачи вращения с постоянной скоростью (специально предназначенные для сообщения вращательного движения с переменной скоростью или с реверсированием F16H 15/00)
B62M13/04 — с устройствами для перемещения ролика при введении его в зацепление с ведущим колесом
B60K17/36 — для привода колес, расположенных одно за другим
Владельцы патента RU 2469901:Дядченко Николай Петрович (RU)
Изобретение относится к трансмиссиям с фрикционным роликом, перемещаемым при введении его в зацепление с периферией ведущего колеса. Колеса (1, 2) каждого борта шасси подвешены на продольных рычагах-балансирах (3). Поворачивающийся ролик-маятник (4) смонтирован эксцентрично по отношению к оси подвески рычагов-балансиров (3). Ролик (4) передает крутящий момент на одно из двух бортовых колес (1, 2), которое в данный момент является ведущим колесом.
Изобретение относится к транспортному машиностроению, а именно к транспортным средствам с балансирной схемой шасси.
Известен способ передачи крутящего момента колесам с балансирной схемой шасси /см., например, Авторевю, 2006, №2, стр.56-58/, колеса каждого борта которого подвешены попарно на продольных рычагах-балансирах, а передача момента колесам производится объединяющим пару колес фрикционным роликом, смонтированным на оси подвески рычагов-балансиров.
Передача крутящего момента на периферийную часть одновременно двум пневмоколесам посредством фрикционного ролика с зубчатой накаткой практически исключает возможность самоочищения роликов при езде по глине, липкому чернозему, травяному покрытию и т.п., что существенно ограничивает область использования известного способа в транспортных средствах с балансирной схемой шасси.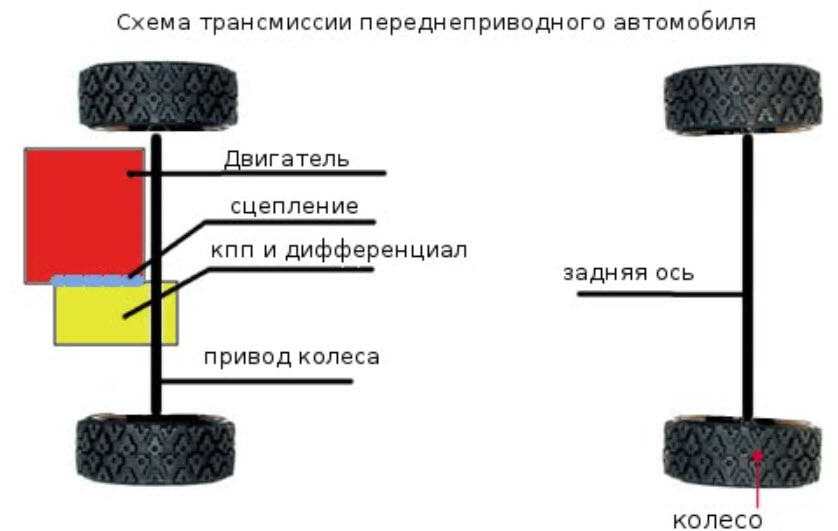
Для устранения, в частности, отмеченного недостатка в способе передачи крутящего момента ведущему колесу шасси, колеса каждого борта которого подвешены на продольных рычагах-балансирах, а передача момента колесам производится роликом, поворачивающийся ролик-маятник смонтирован эксцентрично по отношению к оси подвески рычагов-балансиров, а передача крутящего момента производится роликом на одно из двух бортовых колес, являющееся в данный момент ведущим.
На фиг. изображено схематически двухколесное средство передвижения с балансирной схемой шасси, реализующее заявленный способ передачи крутящего момента ведущему колесу, вид сбоку.
Устройство, реализующее заявленный способ передачи крутящего момента ведущему колесу шасси, содержит колесо 1 с осью вращения А и колесо 2 с осью вращения В (на фиг.- ведущее), смонтированные на концах продольных рычагов-балансиров 3 с осью подвески С, и поворачивающийся по отношению к оси подвеске С ролик-маятник 4 с осью вращения Д.
Заявленный способ реализуется при передаче крутящего момента посредством ролика: 1) на колеса транспортного средства, как в прототипе; 2) на реборды колес транспортного средства, имеющего не только колесное, но и гусеничное шасси с балансирной схемой подвески.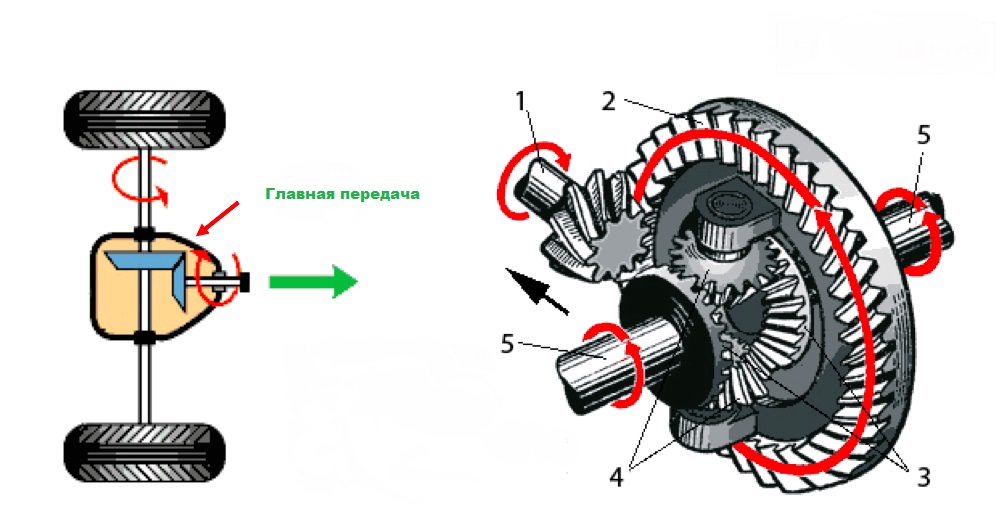
При движении вправо (см. фиг.) транспортного средства с балансирной схемой двухколесного шасси, когда ведущим колесом выбрано колесо 2, к нему подводится ролик-маятник 4 посредством углового смещения оси вращения Д последнего на угол α по отношению к оси подвески С рычагов-балансиров 3. Включается привод (на фиг. не показан), вращающий ролик 4 в нужном направлении вокруг оси Д и передающий крутящий момент от привода к ведущему (в данный момент) колесу 2.
Подъем и спуск транспортным средством с заявленным способом передачи крутящего момента проводится аналогично описанному.
Аналогично выполняется заявленным способом поворот и разворот транспортного средства с балансирной схемой шасси.
Таким образом, по мнению заявителя, предлагаемый способ является новым, имеет изобретательный уровень и промышленно применим, позволяя расширить область использования способа.
Способ передачи крутящего момента ведущему колесу шасси, колеса каждого борта которого подвешены на продольных рычагах-балансирах, а передача момента колесам производится роликом, отличающийся тем, что поворачивающийся ролик-маятник смонтирован эксцентрично по отношению к оси подвески рычагов-балансиров, а передача крутящего момента производится роликом на одно из двух бортовых колес, являющееся в данный момент ведущим.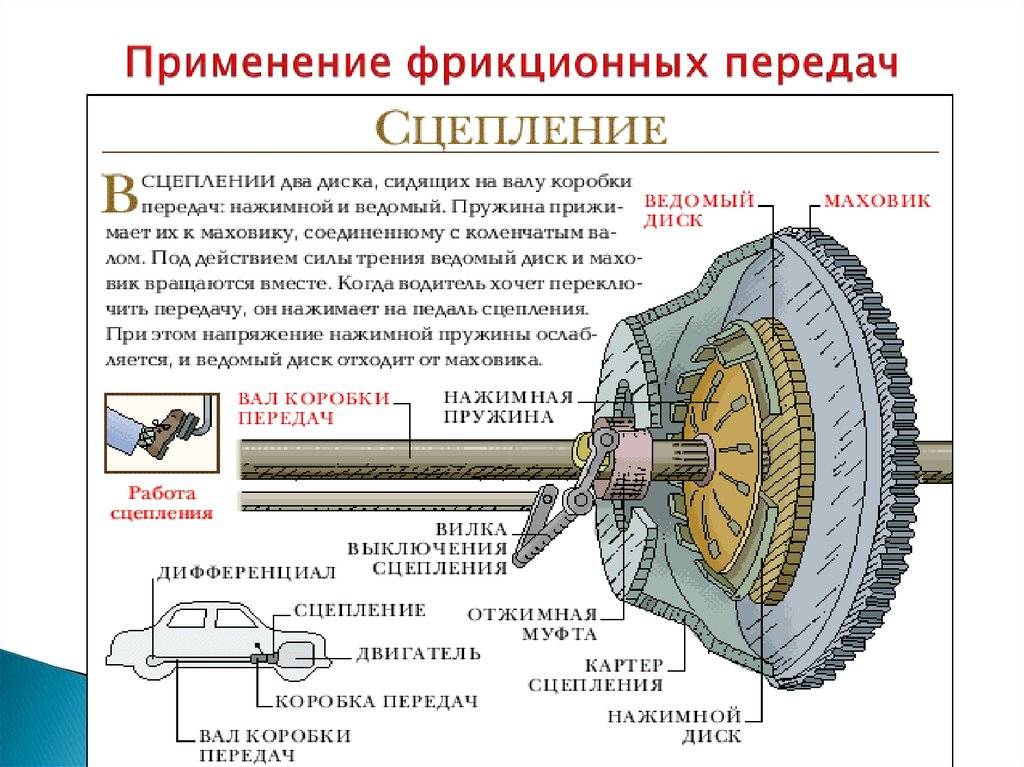
Похожие патенты:
Способ экстренного торможения секционированных транспортных средств и механизмов, оснащенных шаровыми двигателями и шаровыми коробками передач, и устройство для его реализации // 2456182
Изобретение относится к машиностроению и может быть использовано для наземных и рельсовых секционированных транспортных средств и механизмов. .
Велосипед с автоматическим переключением передач // 2424941
Изобретение относится к использованию вязкостной муфты для переключения передач. .
Фрикционная планетарная передача // 2404383
Изобретение относится к машиностроению и может быть использовано в приводных сервисных устройствах мобильной и бытовой техники, станков и технологического оборудования.
Велосипед с автоматическим переключением передач // 2397910
Изобретение относится к средствам управления автоматическим переключением передач велосипеда при изменении вязкого трения, срабатывающим при изменении угловой скорости с последующим подключением вспомогательного усилия от втулки вращающегося колеса для срабатывания заднего переключателя передач.
Многоступенчатая составная автомобильная трансмиссия, имеющая дополнительную секцию с тремя промежуточными валами // 2395409
Изобретение относится к механической трансмиссии транспортного средства. .
Велосипед с автоматическим переключением передач // 2392168
Изобретение относится к средствам управления автоматическим переключением передач велосипеда, срабатывающим при изменении угловой скорости с последующим подключением вспомогательного усилия от втулки вращающегося колеса для срабатывания заднего переключателя передач.
Bелосипед с автоматическим переключением передач // 2392167
Изобретение относится к средствам управления автоматическим переключением передач велосипеда при изменении вязкого трения, срабатывающим при изменении угловой скорости с последующим подключением вспомогательного усилия от втулки вращающегося колеса для срабатывания заднего переключателя передач.
Велосипед с автоматическим переключением передач // 2387568
Изобретение относится к средствам управления автоматическим переключением передач велосипеда при изменении давления текучей среды, срабатывающим при изменении угловой скорости с последующим подключением вспомогательного усилия от втулки вращающегося колеса для срабатывания заднего переключателя передач.
Велосипед с автоматическим переключением передач // 2385816
Изобретение относится к управлению автоматическим переключением передач велосипеда посредством центробежной силы вращающихся грузов с последующим подключением вспомогательного усилия от втулки вращающегося колеса для срабатывания заднего переключателя передач.
Магнитоэлектрическая передача // 2382260
Изобретение относится к области электротехники и может быть использовано в различных механизмах для увеличения крутящего момента. .
Колесное транспортное средство // 2274577
Изобретение относится к коляскам с трансмиссией с фрикционным роликом, сцепленным с периферией ведущего колеса. .
Система привода транспортного средства // 2455175
Изобретение относится к устройствам передачи крутящегося момента от приводного колеса к ведущим колесам транспортного средства. .
Узел механической адаптации // 2360804
Изобретение относится к элементу трансмиссии моторизованного транспортного средства, в частности к узлу механической адаптации. .
.
Проходная гипоидная главная передача // 2353530
Изобретение относится к транспортному машиностроению, в частности к проходным ведущим мостам. .
Универсальное транспортное средство высокой проходимости колобова к.а. // 2144867
Изобретение относится к автомобилям-амфибиям колесного и гусеничного хода. .
Механическая силовая передача многоосного транспортного средства // 2088430
Гусеничный транспортер-тягач // 2081020
Устройство для перераспределения крутящего момента между приводным и неприводным расположенными одно за другим колесами автомобиля // 2042539
Изобретение относится к автомобильному транспорту, а именно к устройствам для перераспределения крутящего момента между приводными и неприводными колесами автомобиля, расположенными одно за другим.
Балансирный редуктор // 2019444
Изобретение относится к машиностроению, в частности к колесным транспортным средствам. .
Устройство трансмиссии транспортного средства // 2013224
Изобретение относится к транспортному машиностроению, а более конкретно к устройствам трансмиссии транспортных средств, преимущественно малолитражных с движителем на пневматических камерных шинах.
Транспортное средство // 2006405
Изобретение относится к транспортному и сельскохозяйственному машиностроению. .
Трансмиссия
- Подвеска
- Ременный привод
- Тормозные системы
- Системы фильтрации
- Трансмиссия
- Электрическое оборудование
- Системы охлаждения
- Автолампы и щётки стеклоочистителей
- Прочее
Автомобильная трансмиссия
Вся совокупность узлов, чьей основной задачей является передача крутящего момента от двигателя к ведущим колесам, называется трансмиссией автомобиля. Кроме передачи крутящего момента, трансмиссия применяется и для изменения его величины и направления (осуществление заднего хода).
Кроме передачи крутящего момента, трансмиссия применяется и для изменения его величины и направления (осуществление заднего хода).
Трансмиссии делят по типу привода. В качестве ведущих в транспортном средстве могут выступать задние колеса, передние или сразу все колеса (так называемый полный привод). В зависимости от типа привода, конструктивное исполнение трансмиссии автотранспортного средства может в значительной мере различаться.
В общепринятой конструкции трансмиссии современного бензинового или дизельного автомобиля двигатель и коробка переключения передач традиционно разделяются сцеплением, назначение которого состоит в кратковременном их разъединении (например, для смены передачи) и плавном соединении. А вот после КПП трансмиссии классических переднеприводного и заднеприводного автомобилей существенно различаются между собой.
У переднеприводного легкового автомобиля дифференциал и главная передача, как правило, размещены непосредственно в коробке переключения передач, из которой с помощью полуосей и комплекта ШРУСов (шарниров равных угловых скоростей) крутящий момент двигателя и передается на передние ведущие колеса. У типичного заднеприводного автомобиля крутящий момент от двигателя через коробку переключения передач передается на главную передачу и дифференциал (расположенные в заднем мосту) с помощью карданного вала, и далее посредством полуосей – на ведущие задние колеса.
У типичного заднеприводного автомобиля крутящий момент от двигателя через коробку переключения передач передается на главную передачу и дифференциал (расположенные в заднем мосту) с помощью карданного вала, и далее посредством полуосей – на ведущие задние колеса.
В последние годы все большую популярность обретают электромобили. Одним из их плюсов является значительное упрощение трансмиссии. При подсоединении к каждому колесу своего электродвигателя, в качестве трансмиссии выступает только одноступенчатый зубчатый редуктор. А в случае, когда двигатели вмонтированы в колеса, трансмиссия по своей сути становится полностью электронной.
Ступицы колес и подшипники ступиц
Колесные ступицы – это узел, соединяющий подвеску автомобиля с системой подшипников, дающей возможность колесам свободно вращаться. Ступичные узлы оказывают самое прямое влияние на степень управляемости автомобиля. Их выход из строя может привести к непредсказуемому изменению траектории движения транспортного средства и к возникновению ДТП.
Колесные ступицы и подшипники ступиц от TMI TATSUMI изготавливаются из высококачественной стали, их рабочие поверхности подвергаются процедуре закалки для обеспечения высокой твердости и максимально возможной прочности. Дорожки шариковых подшипников тщательно полируются для максимального снижения трения и уменьшения выработки. Кроме того, в наших подшипниках используются шарики, полностью соответствующие стандарту JIS (Japanese Industrial Standards), что также способствует увеличению срока службы подшипников.
В подшипниковых узлах бренда TMI TATSUMI используется специальное сальниковое уплотнение для обеспечения надежной защиты от воздействия негативных факторов окружающей среды, грязи и абразивных частиц. Кроме того, для минимизации внутреннего трения и сопутствующего ему износа, применяется высокоэффективная смазка, рассчитанная на длительный период эксплуатации без замены.
Наружные и внутренние ШРУСы автомобиля
Шарниры равных угловых скоростей (ШРУС) применяются для непосредственной передачи крутящего момента от коробки передач к ведущим колесам. Выход из строя ШРУСов в конечном итоге приводит к невозможности эксплуатации автомобиля, но обычно столь печальные последствия наступают не сразу. Поэтому, в случае выявления шумов при движении (характерного хруста), необходимо незамедлительно оценить состояние этих шарниров и в случае такой нужды, вовремя их заменить новыми.
Выход из строя ШРУСов в конечном итоге приводит к невозможности эксплуатации автомобиля, но обычно столь печальные последствия наступают не сразу. Поэтому, в случае выявления шумов при движении (характерного хруста), необходимо незамедлительно оценить состояние этих шарниров и в случае такой нужды, вовремя их заменить новыми.
Шарниры равных угловых скоростей TMI TATSUMI производятся на специализированных предприятиях из высококачественной стали, их рабочие поверхности закаляются с использованием токов высокой частоты для обеспечения нужной твердости и максимального срока службы. Поставляемая в комплекте со ШРУСами высококачественная смазка снижает внутреннее трение до минимального уровня, что и способствует длительной и эффективной работе этого узла на автомобиле.
Пыльники ШРУСов
ШРУСы работают в тяжелых условиях под днищем движущегося автомобиля. Надежную защиту шарниров равных угловых скоростей от попадания в них грязи, различных абразивных частиц, жидкостей и пр. выполняют специально разработанные для этой цели пыльники. Такой пыльник является очень важной деталью, ведь в случае его повреждения или появления негерметичности ШРУС быстро выйдет из строя (трущиеся поверхности будут изношены) и потребует замены.
выполняют специально разработанные для этой цели пыльники. Такой пыльник является очень важной деталью, ведь в случае его повреждения или появления негерметичности ШРУС быстро выйдет из строя (трущиеся поверхности будут изношены) и потребует замены.
Пыльники для шарниров равных угловых скоростей бренда TMI TATSUMI производятся из качественного синтетического каучука, стабильно сохраняющего свои характеристики при значительных перепадах температур и под воздействием химически активных веществ, различных абразивов и существенных механических нагрузок. Хомуты пыльников изготавливаются из нержавеющей стали, что гарантирует удобство сборки узла и надежную фиксацию пыльников в течение всего периода их эксплуатации.
Приводные валы
Приводные валы переднеприводных легковых автомобилей подвержены значительным скручивающим нагрузкам и работают в очень жестких условиях, так как расположены в непосредственном контакте с дорожной пылью и грязью, частицами битума, воды, бензина, масла при самых разных температурах. Именно поэтому к применяемым материалам, обработке поверхности и общему качеству изготовления приводных валов предъявляются весьма жесткие требования.
Именно поэтому к применяемым материалам, обработке поверхности и общему качеству изготовления приводных валов предъявляются весьма жесткие требования.
В случае выхода хотя бы одного приводного вала из строя, автомобиль попросту не сможет продолжить движение.
Под брендом TMI TATSUMI производятся автомобильные приводные валы для установки на транспортных средствах самых разных марок. В их основе лежит сталь высокого качества с применением термических процессов ее поверхностного упрочнения (закалки) с последующей антикоррозионной обработкой. А применение высококачественной эффективной смазки, надежных пыльников, изготовленных из синтетического каучука и хомутов из нержавеющей стали обеспечивает долгую и надежную работу этих деталей и узла в целом.
Сцепление автомобиля
Автомобильное сцепление – это ответственный узел, подверженный в ходе своей работы значительным температурным и переменным механическим нагрузкам. Задача сцепления – временно разъединять автомобильный двигатель и коробку перемены передач. Частичный выход сцепления из строя приводит к значительным сложностям в эксплуатации автомобиля (например, пробуксовка сцепления, неполное выключение сцепления), росту расхода топлива, быстрому износу коробки передач, двигателя. Полный отказ сцепления делает эксплуатацию автомобиля по сути невозможной (отказ включения или выключения сцепления).
Частичный выход сцепления из строя приводит к значительным сложностям в эксплуатации автомобиля (например, пробуксовка сцепления, неполное выключение сцепления), росту расхода топлива, быстрому износу коробки передач, двигателя. Полный отказ сцепления делает эксплуатацию автомобиля по сути невозможной (отказ включения или выключения сцепления).
Комплекты сцеплений бренда TMI TATSUMI производятся из сталей высокого качества, а для надежной передачи крутящего момента от двигателя применяется фрикционный материал специального состава. Диафрагменная пружина подвергается дробеструйной обработке лепестков для формирования упрочненного поверхностного слоя, существенно увеличивающего общий срок службы этой детали.
Наши преимущества
- ОЕ качество
- Широкий ассортимент
- Наличие товара
- Гарантия 24 месяца
- Поддержка клиентов 360˚
- Честные цены
Технические статьи
Гарантия 24 месяца
Использование высококачественного исходного сырья и проверка готовой продукции на соответствие всем необходимым требованиям позволяет нам утверждать, что под брендом TMI TATSUMI для вторичного рынка выпускаются премиальные автомобильные запчасти и комплектующие.
Крутящий момент и скорость на колесах автомобилей с электродвигателями в колесах
Первоначально эта статья была опубликована 20 сентября 2017 г.
Автомобили, приводимые в движение электродвигателями в колесах, не имеют дифференциала, но передают крутящий момент на колеса напрямую и независимо.
Большинство дорожных транспортных средств приводятся в движение одним двигателем или двигателем с трансмиссией, передающей эту мощность на колеса, создавая крутящий момент на ступицах колес. Колеса должны свободно двигаться с разной скоростью относительно друг друга, чтобы можно было проходить повороты и менять дорожное покрытие.
Это достигается с помощью дифференциала, механического устройства, которое в своей простейшей форме передает одинаковый крутящий момент на оба колеса на оси, позволяя им вращаться с разной скоростью. Затем колеса могут вращаться со своей естественной скоростью, определяемой кинематикой транспортного средства.
Так называемый «открытый дифференциал» допускает любую разницу скорости вращения колес на оси. Там, где сила трения между шиной и дорогой сильно отличается на одном колесе от другого, колесо с более низким коэффициентом трения может потерять сцепление с дорогой и быстро раскрутиться. Это может произойти при прохождении поворотов, когда вес автомобиля смещается на внешние колеса, так что внутренние колеса имеют мало сцепления с дорожным покрытием, или когда одно колесо находится на поверхности с плохим сцеплением, например, на льду или рыхлых камнях.
Такая ситуация явно нежелательна, поэтому было разработано несколько систем, противодействующих потере сцепления с дорогой, но при этом позволяющих передавать крутящий момент на колесо с хорошим сцеплением с дорогой. Чаще всего используется «дифференциал повышенного трения» или противобуксовочная система (TCS) для предотвращения пробуксовки колес. Первый представляет собой более сложный механический эквивалент открытого дифференциала, который ограничивает дифференциал скорости вращения колес, а второй притормаживает колесо, теряющее сцепление с дорогой, чтобы предотвратить его раскручивание.
Рис. 1: Электродвигатель Protean Electric с электроникой и тормозом.
Более сложные системы «управления вектором крутящего момента» обеспечивают дальнейшее улучшение управляемости транспортного средства, но встречаются редко из-за их сложности и стоимости.
Транспортные средства с двигателями в колесах не имеют дифференциала, поэтому возникает вопрос, как будет вести себя транспортное средство с точки зрения скорости вращения колес и как можно решить проблемы, связанные с отсутствием тяги. Ответы довольно прямолинейны.
Если колеса-моторы управляются одинаковым крутящим моментом каждого из моторов, транспортное средство будет вести себя точно так же, как если бы был открытый дифференциал. Систему контроля тяги можно использовать для контроля потери тяги, как в обычном автомобиле. С другой стороны, улучшенные плавность хода и управляемость автомобиля могут быть достигнуты за счет динамического изменения распределения крутящего момента между колесными двигателями.
Система мотор-колес
Для целей настоящей статьи система мотор-колес считается состоящей из двух блоков, установленных на противоположных сторонах транспортного средства, по одному на каждое переднее колесо или по одному на каждое заднее колесо колесо. Каждый блок состоит из электрической машины, инвертора с микропроцессорным управлением и фрикционного тормоза. В случае продуктов Protean Electric они объединены в единый блок, который полностью размещен внутри обода колеса (см. рис. 1), но инвертор также можно разместить в другом месте автомобиля.
Двигатель может обеспечивать как положительный (ускоряющий), так и отрицательный (тормозной) крутящий момент, но фрикционные тормоза сохраняются, поскольку потребности в торможении обычно превышают возможности двигателя и в случаях, когда электрическая система автомобиля не может принять ток, который восстанавливается при торможении.
Рис. 2: Схема управления внутриколесными электродвигателями.![]()
Мотор-колесо представляет собой устройство, создающее крутящий момент. В примере с двигателем Protean Electric блок управления транспортным средством (VCU) связывается с системой двигателя через шину локальной сети контроллеров (CAN), отправляя запросы крутящего момента каждые несколько миллисекунд (см. рис. 2). В ответ система двигателя развивает требуемый крутящий момент на ступице колеса. По возврату двигатель сообщает о своем состоянии и максимально доступном крутящем моменте. Он также может сообщать о своей скорости, которую VCU может использовать для расширенных функций контроля тяги.
В отличие от двигателей внутреннего сгорания, электродвигатели могут создавать положительный и отрицательный крутящий момент в обоих направлениях. Это называется работой в четырех квадрантах и позволяет трансмиссиям с электродвигателями улучшать функции контроля тяги и устойчивости автомобиля. Кроме того, системы электродвигателей имеют очень быстрое время отклика. Обычно они способны переключаться с максимального положительного крутящего момента на максимальный отрицательный крутящий момент или наоборот менее чем за 10 мс. Возможен высокочастотный контроль, который может повысить безопасность и управляемость автомобиля, особенно с двигателями в колесах с прямым приводом, которые обеспечивают крутящий момент непосредственно на ступицах колес без каких-либо промежуточных валов, осей или шестерен.
Возможен высокочастотный контроль, который может повысить безопасность и управляемость автомобиля, особенно с двигателями в колесах с прямым приводом, которые обеспечивают крутящий момент непосредственно на ступицах колес без каких-либо промежуточных валов, осей или шестерен.
Обратите внимание, что двигатель не является устройством с регулируемой скоростью. VCU не может запрашивать скорость от системы двигателя. Как и в случае с обычными трансмиссиями, скорость вращения колес является следствием крутящего момента, приложенного к ступице колеса, в сочетании с сопротивлением вращению, в котором преобладает инерция транспортного средства.
Дифференциал и связанные с ним функции
Дифференциал требуется там, где один силовой агрегат, двигатель внутреннего сгорания или электродвигатель используется для привода двух колес на оси. Без него два колеса на оси были бы вынуждены вращаться с одинаковой скоростью, что привело бы к неприемлемой управляемости автомобиля и износу шин. Дифференциал также является конечным передаточным числом, усиливающим крутящий момент от карданного вала к полуосям (см. рис. 3).
Дифференциал также является конечным передаточным числом, усиливающим крутящий момент от карданного вала к полуосям (см. рис. 3).
Рис. 3: Обычный заднеприводный автомобиль с дифференциалом.
Дифференциал для неведущих колес не требуется, поскольку они физически не связаны между собой и поэтому могут вращаться с разной скоростью.
Открытый дифференциал
Открытый дифференциал — это самый простой и наиболее распространенный тип дифференциала на дорожных транспортных средствах. Скорости колес определяются кинематикой автомобиля, слегка измененной динамикой шин. Игнорируя проскальзывание колес, при прохождении поворотов внешнее колесо будет вращаться быстрее, чем внутреннее. В автомобиле с шириной колеи t и радиусом качения r , движущегося со скоростью v в повороте радиусом R , приблизительные угловые скорости внутреннего и внешнего колес определяются уравнением 1
(уравнение 1)
Обратите внимание, что это чисто результат геометрии ситуации и того факта, что колеса могут свободно вращаться независимо; здесь нет зависимости от крутящего момента, подводимого к колесам (см. рис. 4). Учет динамики шин изменяет уравнение. 1 немного. Приложение крутящего момента к колесу приводит к так называемому проскальзыванию колеса [1]. Это не означает потери сцепления между шиной и дорогой; скорее, это особенность динамики шины. В результате соотношение между скоростью вращения колеса и скоростью транспортного средства изменяется в соответствии с:
рис. 4). Учет динамики шин изменяет уравнение. 1 немного. Приложение крутящего момента к колесу приводит к так называемому проскальзыванию колеса [1]. Это не означает потери сцепления между шиной и дорогой; скорее, это особенность динамики шины. В результате соотношение между скоростью вращения колеса и скоростью транспортного средства изменяется в соответствии с:
где s это коэффициент скольжения. Коэффициент скольжения зависит от прилагаемого крутящего момента, а также от свойств шины и поверхности контакта шина-дорога [2]. Коэффициент скольжения может превышать 0,1, в то время как хорошее сцепление сохраняется на хорошем дорожном покрытии и при приложении высокого крутящего момента. С учетом проскальзывания, которое может быть разным для внутренних и внешних колес из-за различий в дорожном покрытии, получаем скорости колес в уравнении 2.
(уравнение 2)
Поскольку скольжение является функцией крутящего момента, теперь существует некоторая зависимость от крутящего момента на каждом из колес. Есть дальнейшие незначительные модификации уравнения. 1, которые являются результатом недостаточной или избыточной поворачиваемости транспортного средства и неровностей дорожного покрытия, но они не относятся к данному обсуждению.
Есть дальнейшие незначительные модификации уравнения. 1, которые являются результатом недостаточной или избыточной поворачиваемости транспортного средства и неровностей дорожного покрытия, но они не относятся к данному обсуждению.
Важные выводы, касающиеся поведения ведущих колес с открытым дифференциалом, следующие:
- Скорости колес полностью определяются после допущения, что на каждое колесо передается одинаковый крутящий момент и что два колеса на оси могут свободно вращаться. вращаться с разной скоростью.
- Колеса обретают свою «естественную» скорость, что обеспечивает хорошую управляемость и поведение шин на поворотах.
Пока эти два предположения верны, не имеет значения, как они достигаются.
Электродвигатели в колесах и открытый дифференциал
Самый простой способ управления парой электродвигателей в колесах на оси — потребовать равный крутящий момент обоих двигателей.
Оба колеса будут приводиться в движение с одинаковым крутящим моментом независимо от разницы скоростей, если VCU требует от обоих двигателей одинаковый крутящий момент.
В автомобиле с мотор-колесами ведущие колеса физически не связаны полуосями, поэтому они не вынуждены вращаться с одинаковой скоростью. Как и в случае с открытым дифференциалом, они могут свободно вращаться с разными скоростями без ограничений.
Таким образом, два допущения верны для транспортного средства, приводимого в движение электродвигателями в колесах, и поэтому также применимо уравнение 1: поведение колес в транспортном средстве, приводимом в движение электродвигателями в колесах, точно такое же, как и в транспортное средство с центральной силовой установкой, приводимой в движение через открытый дифференциал, если VCU требует одинакового крутящего момента от каждого двигателя в колесе.
Рис. 4: Аккермановская геометрия вращающегося транспортного средства.
Хотя физико-механического дифференциала нет, мы будем называть этот режим управления двигателями в колесах «электронным открытым дифференциалом».
Ограничения открытого дифференциала
Открытый дифференциал и электронный открытый дифференциал подвержены тем же ограничениям, которые возникают, когда одно колесо на оси имеет значительно лучшее сцепление с дорогой, чем другое, и в этом случае:
- Максимальный крутящий момент, который может передаваться на любое колесо, ограничивается колесом с более низким пределом сцепления.

- Нет ничего, что предотвратило бы раскручивание колеса с меньшим сцеплением, если крутящий момент больше, чем может выдержать контакт шины с дорогой.
Существует несколько обстоятельств, которые могут привести к асимметричному ограничению тягового усилия по оси:
- Прохождение поворотов, когда вес смещается на внешние колеса, что снижает предел тягового усилия на внутренних колесах.
- «Сплит- μ » дорожное покрытие, у которого одно колесо находится на хорошем дорожном покрытии, а другое — на рыхлых камнях, льду или воде.
- Вождение по бездорожью.
В обычных транспортных средствах используется ряд технологий для предотвращения пробуксовки колес и потери крутящего момента в этих обстоятельствах. Некоторые из них и их аналоги для колесных двигателей обсуждаются в этой статье.
Противобуксовочная система
Противобуксовочная система предназначена для предотвращения пробуксовки колеса из-за отсутствия сцепления с дорожным покрытием.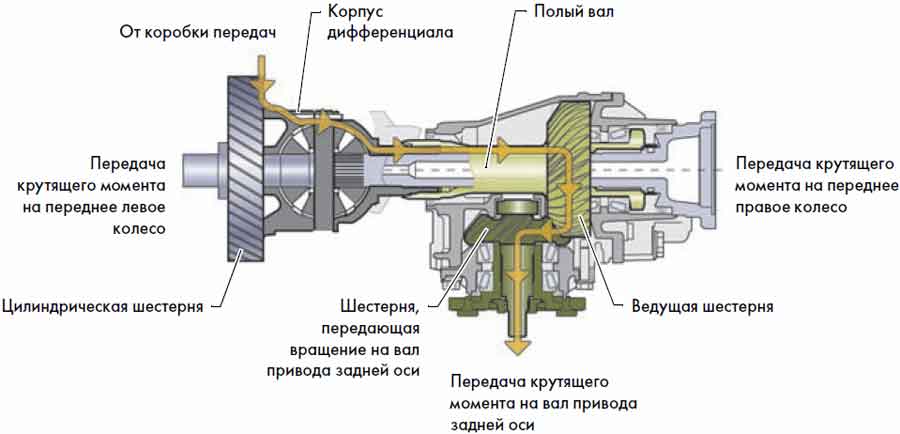 Он реализован как часть системы электронного контроля устойчивости (ESC), которая может задействовать тормоза отдельно для каждого колеса с помощью блока антиблокировочной тормозной системы (ABS). ESC становится все более распространенным явлением и в настоящее время является обязательным в Европе и США для легковых автомобилей.
Он реализован как часть системы электронного контроля устойчивости (ESC), которая может задействовать тормоза отдельно для каждого колеса с помощью блока антиблокировочной тормозной системы (ABS). ESC становится все более распространенным явлением и в настоящее время является обязательным в Европе и США для легковых автомобилей.
Система контроля тяги обнаруживает, что колесо пробуксовывает, и притормаживает это колесо. Помимо контроля потери тяги, это позволяет передавать крутящий момент на противоположное колесо даже при открытом дифференциале или электронном открытом дифференциале, поскольку тормоз противодействует крутящему моменту, прикладываемому трансмиссией к пробуксовывающему колесу.
TCS можно использовать с мотор-колесами точно так же, как и в обычных автомобилях, с теми же результатами. VCU не требует специальных действий.
Ручная тяга, с другой стороны, может контролироваться без использования тормозной системы ESC в автомобиле с приводом от мотора-колеса. VCU использует информацию о скорости вращения колес, передаваемую двигателями в колесах, чтобы определить, когда теряется сцепление с дорогой, и снижает требуемый крутящий момент на этом колесе. Это может быть сделано без уменьшения потребности в крутящем моменте на другом колесе. Результат может быть лучше, чем у обычной TCS, из-за быстрого времени отклика системы двигателя в колесе и способности двигателей создавать как положительный, так и отрицательный крутящий момент. Мы можем назвать это электронной системой контроля тяги (eTCS).
VCU использует информацию о скорости вращения колес, передаваемую двигателями в колесах, чтобы определить, когда теряется сцепление с дорогой, и снижает требуемый крутящий момент на этом колесе. Это может быть сделано без уменьшения потребности в крутящем моменте на другом колесе. Результат может быть лучше, чем у обычной TCS, из-за быстрого времени отклика системы двигателя в колесе и способности двигателей создавать как положительный, так и отрицательный крутящий момент. Мы можем назвать это электронной системой контроля тяги (eTCS).
eTCS чем-то похожа на системы Antriebsshlupfregelung (ASR), которые являются частью системы контроля тяги в некоторых обычных автомобилях и включают модуляцию крутящего момента двигателя.
Дифференциал повышенного трения
Дифференциал повышенного трения представляет собой более сложную форму механического дифференциала. В производстве находится ряд различных реализаций, в том числе с элементом электронного управления. Здесь они обсуждаются отдельно как «активные дифференциалы».
Здесь они обсуждаются отдельно как «активные дифференциалы».
В отличие от открытого дифференциала, который всегда равномерно распределяет крутящий момент на два колеса на оси, дифференциал повышенного трения распределяет крутящий момент в соответствии с относительными скоростями двух колес, что достигается добавлением механизма, который сопротивляется относительной скорости различия между двумя выходными валами. Крутящий момент уменьшается на более быстром колесе и увеличивается на более медленном колесе, что предотвращает раскручивание колеса, но не снижает общий крутящий момент. Хотя это преодолевает основные ограничения открытого дифференциала, это также приводит к большему крутящему моменту, передаваемому на внутренние колеса во время прохождения поворотов, что вызывает недостаточную поворачиваемость.
В транспортных средствах, приводимых в движение двигателями в колесах, VCU может требовать неодинакового крутящего момента от двух двигателей в ответ на скорости, сообщаемые двигателями, точно так же, как дифференциал повышенного трения. Однако на практике это не обеспечивает оптимального распределения крутящего момента при отсутствии потери тяги. Система eTCS с векторизацией крутящего момента обеспечит превосходную управляемость и контроль тяги.
Однако на практике это не обеспечивает оптимального распределения крутящего момента при отсутствии потери тяги. Система eTCS с векторизацией крутящего момента обеспечит превосходную управляемость и контроль тяги.
В обычном автомобиле с дифференциалом повышенного трения можно обеспечить асимметричный крутящий момент на оси без существенного снижения максимального общего крутящего момента на оси. С другой стороны, в мотор-колесах уменьшение крутящего момента на одном колесе не позволяет увеличить крутящий момент на противоположном колесе сверх его максимального крутящего момента. Это неизбежно означает, что общий крутящий момент на оси, создаваемый двумя мотор-колесами, уменьшается из-за асимметрии крутящего момента.
Заблокированный дифференциал
Заблокированный дифференциал может быть эффективен для внедорожников, у которых тяговое усилие на колесах плохое и очень непостоянное. Заблокированный дифференциал заставляет два колеса на оси вращаться с одинаковой скоростью. Затем крутящий момент естественным образом перемещается туда, где есть тяга.
Затем крутящий момент естественным образом перемещается туда, где есть тяга.
С моторами в колесах VCU может реализовывать контуры управления скоростью на каждом из ведущих колес для достижения того же эффекта. Как описано здесь, сами двигатели не включают управление скоростью, но связь между двигателями и VCU имеет достаточную пропускную способность, чтобы позволить блоку управления транспортным средством (VCU) запускать контуры управления для регулирования скорости вращения колес.
Активный дифференциал
Активный дифференциал — это современная система, применяемая на некоторых спортивных автомобилях, которая улучшает управляемость и управляемость за счет активного управления распределением крутящего момента. Система реагирует на различные датчики вокруг автомобиля, которые отслеживают намерения водителя и реакцию автомобиля, которые интерпретируются электронным блоком управления (ЭБУ). Затем ECU дает команду дифференциалу с электронным управлением, который может распределять крутящий момент в соответствии с требованиями. Помимо контроля тяги, такая система может улучшить управляемость и устойчивость. Механически активный дифференциал реализован как самоблокирующийся дифференциал с электронным управлением. Двумя пакетами сцепления обычно можно управлять с помощью электроники для передачи крутящего момента с одной полуоси на другую, тем самым изменяя поведение основного открытого дифференциала под управлением систем управления динамикой автомобиля в автомобиле. Примером такой системы является электронный модуль векторизации крутящего момента GKN, реализованный в BMW X63.
Помимо контроля тяги, такая система может улучшить управляемость и устойчивость. Механически активный дифференциал реализован как самоблокирующийся дифференциал с электронным управлением. Двумя пакетами сцепления обычно можно управлять с помощью электроники для передачи крутящего момента с одной полуоси на другую, тем самым изменяя поведение основного открытого дифференциала под управлением систем управления динамикой автомобиля в автомобиле. Примером такой системы является электронный модуль векторизации крутящего момента GKN, реализованный в BMW X63.
Дифференциал с электронным управлением — сложный и дорогой компонент. Подобная функциональность может быть достигнута без добавления механических компонентов в транспортном средстве с приводом от электродвигателя. В этом случае VCU выполняет расчеты, аналогичные тем, которые ECU выполнял бы для активного дифференциала, и соответственно предъявляет асимметричные требования к крутящему моменту для двух колесных двигателей. Это иногда называют векторизацией крутящего момента, и его можно использовать для:
- Улучшения устойчивости автомобиля на высоких скоростях.

- Повышение устойчивости автомобиля при наличии таких помех, как боковой ветер или колеи на дороге.
- Улучшение маневренности автомобиля на низких скоростях.
- Улучшите чувствительность и управляемость на поворотах.
Управление вектором крутящего момента с помощью двигателей в колесах имеет преимущество перед активным дифференциалом в обычном автомобиле не только с точки зрения стоимости компонентов и массы, но и потому, что система более чувствительна и может лучше реагировать на переходные ситуации. Он также может плавно вводить тормозной момент, не используя тормозную систему, что расширяет возможности системы по поддержанию контроля над автомобилем.
Эквивалентность обычного транспортного средства и полноприводного транспортного средства
В таблице 1 приведены различные дифференциальные и связанные с ними системы, используемые в обычных транспортных средствах с двигателем центрального сгорания или электродвигателем, а также описана реализация на полноприводном транспортном средстве, которое приводит к такому же поведению.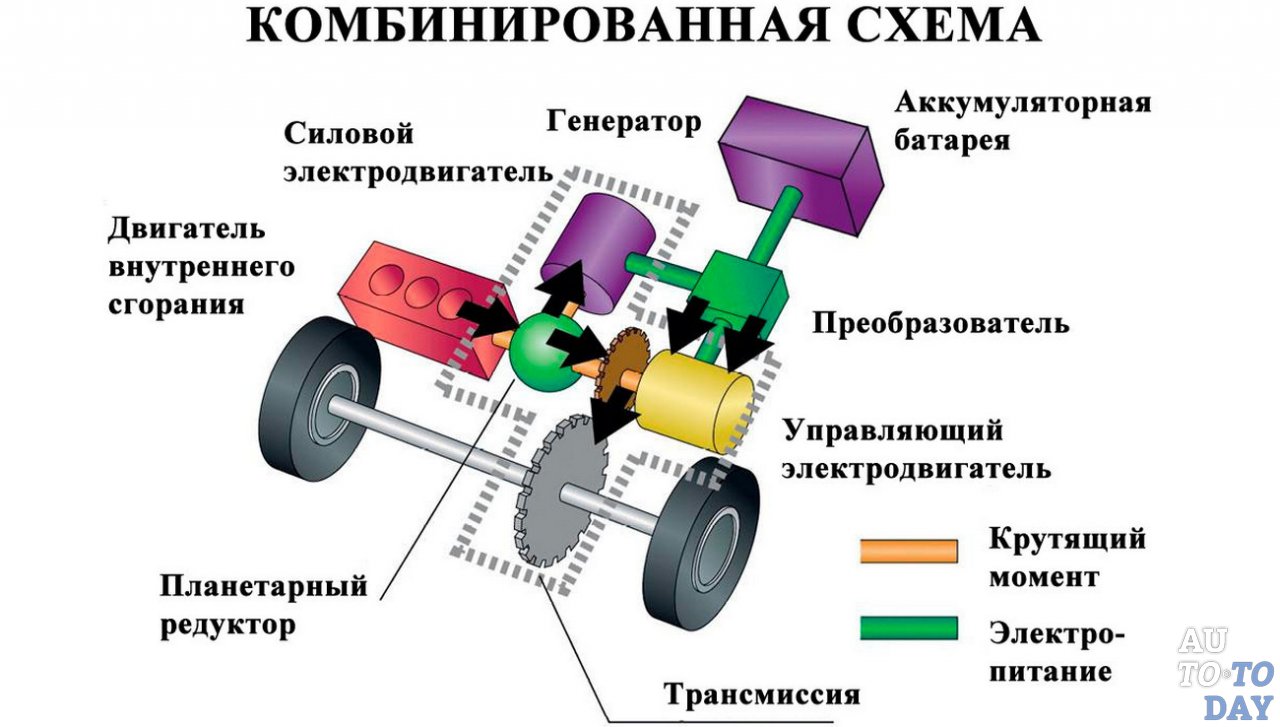
В целом, управление скоростью вращения колес и, следовательно, управление транспортным средством в колесном автомобиле может быть лучше, чем в обычном транспортном средстве, и реализовано с меньшими затратами и сложностью.
Полный привод
В данном обсуждении рассматривается пара ведущих передних колес или пара ведущих задних колес транспортного средства. Все выводы в равной степени относятся к транспортному средству с двигателями на всех четырех колесах.
Например, отправка одинакового крутящего момента на все четыре двигателя в колесах дает точно такое же поведение, как у обычного полноприводного автомобиля с открытыми передним и задним дифференциалами и открытым межосевым дифференциалом. Все четыре колеса могут свободно вращаться независимо друг от друга, и на каждую ступицу колеса действует одинаковый крутящий момент.
Заключение
Колёсные электродвигатели позволяют улучшить управление динамикой автомобиля при меньших затратах и сложности по сравнению с обычными автомобилями, передающими мощность на колёса через дифференциал.
| Обычная автомобильная система | Эквивалент для полноприводных транспортных средств |
| Открытый дифференциал | Одинаковая потребность в крутящем моменте для обоих двигателей |
| Система контроля тяги на базе ESC | Контроль тяги на основе ESC, как в обычном автомобиле, или снижение потребности в крутящем моменте при проскальзывании колеса |
| Дифференциал повышенного трения | Уменьшить долю крутящего момента для более быстрого колеса в соответствии с дифференциальной скоростью |
| Заблокированный дифференциал | Реализовать контуры управления скоростью для каждого двигателя в VCU |
| Активный дифференциал | Функция векторизации крутящего момента в VCU |
Простейшая реализация управления двигателем в колесах, всегда требующая одинакового крутящего момента от всех двигателей, приведет к поведению точно так же, как в автомобиле с открытым дифференциалом, но без необходимости в механическом дифференциале. или полуоси. На это поведение можно наложить те же тормозные системы контроля тяги и/или устойчивости, которые используются в обычных транспортных средствах, чтобы предотвратить пробуксовку колес во время прохождения поворотов или на поверхностях с низким сцеплением. С другой стороны, улучшенные функции контроля тяги и управления вектором крутящего момента могут быть достигнуты без добавления дополнительных материалов за счет модуляции крутящего момента, требуемого от электродвигателей, в отличие от обычных транспортных средств, которые требуют сложных, тяжелых и дорогих механических систем, таких как активный дифференциал для достижения аналогичного результата.
или полуоси. На это поведение можно наложить те же тормозные системы контроля тяги и/или устойчивости, которые используются в обычных транспортных средствах, чтобы предотвратить пробуксовку колес во время прохождения поворотов или на поверхностях с низким сцеплением. С другой стороны, улучшенные функции контроля тяги и управления вектором крутящего момента могут быть достигнуты без добавления дополнительных материалов за счет модуляции крутящего момента, требуемого от электродвигателей, в отличие от обычных транспортных средств, которые требуют сложных, тяжелых и дорогих механических систем, таких как активный дифференциал для достижения аналогичного результата.
Ссылки
[1] М. Бланделл и Д. Харти: Подход многотельных систем к динамике транспортных средств, Оксфорд, Великобритания: Butterworth-Heinemann, 2004.
[2] HB Pacejka: Шина и динамика транспортных средств, Оксфорд, Великобритания : Butterworth-Heinemann, 2002.
[3] GKN plc. (2016 г. , 10 марта): «Электронное управление вектором крутящего момента» (онлайн), доступно: www.gkn.com/driveline/our-solutions/trans-axle-solutions/limited-slip-and-locking-diversials/Pages/electronictorque- vectoring.aspx
, 10 марта): «Электронное управление вектором крутящего момента» (онлайн), доступно: www.gkn.com/driveline/our-solutions/trans-axle-solutions/limited-slip-and-locking-diversials/Pages/electronictorque- vectoring.aspx
Свяжитесь с Марком Хавортом, Protean Electric, [email protected]
Что такое управление по крутящему моменту? Все, что тебе нужно знать.
Прежде чем дать определение рулевому управлению по крутящему моменту, давайте сначала быстро поймем, что означает крутящий момент. Крутящий момент — это мера силы, которая может заставить объект вращаться вокруг оси. Сила здесь исходит от двигателя и вращающегося объекта, являющегося колесами. Таким образом, в основном это мощность, передаваемая двигателем на трансмиссию, которая двигает колеса вперед.
Теперь давайте перейдем к проблеме подруливания по крутящему моменту. Подруливание по крутящему моменту — это явление, особенно характерное для переднеприводных автомобилей. Это когда мощность, подаваемая на два колеса, не получает достаточного сцепления из-за сбоев в распределении.
Содержание
Почему возникают проблемы с передним приводом
На индийском автомобильном рынке преобладают переднеприводные автомобили. Некоторые из самых популярных автомобилей в Индии, такие как Maruti Suzuki Alto, Hyundai Verna, Honda City, являются переднеприводными, и поэтому эта проблема, вполне возможно, коснулась всех индийцев в какой-то момент, осознаете вы это или нет.
Поскольку ваша трансмиссия одновременно перемещает и управляет автомобилем, регулировка мощности по-разному на газоне с меньшим сцеплением является нормальным явлением.
Эта проблема в основном затрагивает автомобили с передним приводом, приводя к тому, что рулевое управление дергается в том или ином направлении. В зависимости от выходной мощности транспортного средства это может быть незначительной тягой к поразительному и резкому повороту, для исправления которого требуются согласованные усилия.
Что вызывает рулевое управление по крутящему моменту?
Существует несколько различных причин возникновения подруливания по крутящему моменту.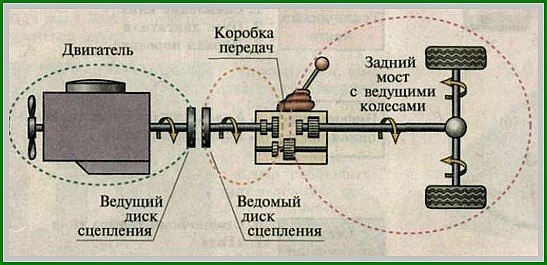 Подруливание по крутящему моменту может быть вызвано целым рядом причин, в том числе плохим сцеплением или потерей сцепления между ведущими колесами, недостаточно накачанными шинами, конусностью шин или даже несоосностью, которые могут повлиять на способность автомобиля двигаться вперед по прямой.
Подруливание по крутящему моменту может быть вызвано целым рядом причин, в том числе плохим сцеплением или потерей сцепления между ведущими колесами, недостаточно накачанными шинами, конусностью шин или даже несоосностью, которые могут повлиять на способность автомобиля двигаться вперед по прямой.
Наиболее частой причиной крутящего момента в переднеприводных автомобилях является поперечное расположение двигателя. В таких автомобилях двигатель, трансмиссия и дифференциал обычно смонтированы в одном месте — в моторном отсеке.
Это происходит, когда дифференциал и трансмиссия нависают с одной стороны двигателя. Это означает, что полуоси находятся в несоответствии, передавая больше мощности на одно колесо, чем на другое.
Проблема может усугубляться при резком ускорении, когда автомобиль качается назад, перенося вес с ведущих колес, уменьшая прижимную силу и вызывая пробуксовку колес.
Любой владелец переднеприводной машины, совершивший дерзкий маневр на Т-образном перекрестке, без сомнения испытал это тошнотворное чувство, когда пытаешься тронуться с места, а колеса начинают бороться за сцепление с дорогой в самый неподходящий момент.
В автомобилях с задним приводом редко используется управление крутящим моментом, поскольку конструкция двигателя, дифференциала и трансмиссии является линейной, что означает, что полуоси имеют одинаковую длину.
Можно ли свести к минимуму рулевое управление по крутящему моменту?
Только благодаря переднему приводу невозможно полностью предотвратить подруливание. Если условия позволяют, вы будете испытывать некоторые вибрации во время вождения.
Однако его можно свести к минимуму, запрограммировав трансмиссию на ограничение передачи мощности на колесо до тех пор, пока автомобиль не наберет достаточное сцепление с дорогой и прижимную силу с помощью различных типов дифференциалов.
Еще один способ минимизировать подруливание по крутящему моменту — запрограммировать колеса на обнаружение подруливания по крутящему моменту и замедление.
Или вы можете попытаться избежать такой ситуации, медленно ускоряясь на шатком газоне.
Так почему же FWD так популярен в Индии?
Хотя в системе переднего привода, безусловно, больше недостатков по сравнению с другими трансмиссиями, ее очень любят в Индии. Вот некоторые из причин, почему они так популярны.
Вот некоторые из причин, почему они так популярны.
ПРОБЕГ
Одной из главных причин популярности fwd является больший пробег. Как правило, FWD обеспечивает большую отдачу за счет того, что он легче. Действительно, вес напрямую влияет на экономию топлива, что ставит еще один плюс в этой конкретной колонке.
Передний привод обычно собирается таким образом, что мосты и трансмиссии соединяются, а не разъединяются, что снижает нагрузку. Это помогает снизить расход топлива на галлон и является одной из основных причин, по которой большинство экономичных автомобилей относятся к этому типу.
КОМФОРТ И ВОЗМОЖНОСТИ
Передний привод также обеспечивает больше места и вместе с тем больший комфорт. Охватывая все основное оборудование впереди, те, кто сзади, получают новое пространство для ног. В кабину также можно упаковать больше груза, что всегда приятно.
А как насчет вождения? Не стоит недооценивать переднее колесо, которое может похвастаться лучшим сцеплением и выдерживает сложные погодные условия.