Коробка «робот» и «автомат» в чем разница?
Содержание
Начиная с конца 80-х годов прошлого века, инженеры стремятся максимально нивелировать разницу между автоматическими и механическими трансмиссиями.
Одним из результатов такой работы стало появление роботизированной «механики», которая на сегодняшний день присутствует в модельных линейках почти всех крупных автопроизводителей.
Какими же преимуществами и недостатками обладает такой «робот» в сравнении с классическим «автоматом»?
Начнем с конструктивных особенностей «робота», который по сути является механической коробкой передач, но без третьей педали. За выжим сцепления в такой КП отвечает электропривод (актуатор).
В отличие от автоматической коробки с гидротрансформатором, конструкция роботизированной «механики» значительно проще, поэтому и дешевле в производстве. Последнее преимущество сыграло главную роль в быстром появлении «роботов» на многих недорогих моделях.
Актуальные Автоновости
[su_row][su_column size=»1/3″]
Потерян номер от машины: что делать?[/su_column] [su_column size=»1/3″]
Штраф за нечитаемые номера в 2018[/su_column] [su_column size=»1/3″]
Нанопленка на номера: отзывы, законность и наказание[/su_column] [/su_row]
Но как оказалось, производители немного поспешили с массовым запуском такой трансмиссии на рынок. Все дело в том, что большинство «роботов», особенно при активной езде, не обеспечивали плавного переключения передач, раздражая водителей рывками и задержками при смене ступеней, а также откатом при старте на подъеме. Кроме того, роботизированные КП не могли похвастаться высокой надежностью.
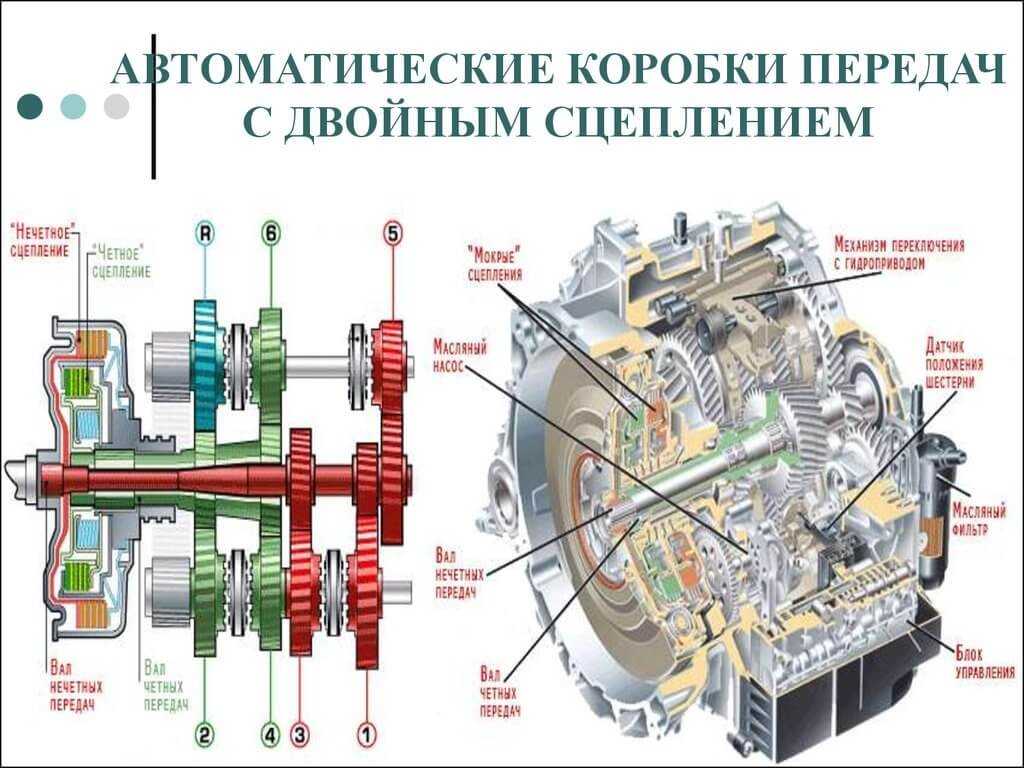
Роботизированная коробка передач с двойным сцеплением
Улучшить плавность «роботов» взялся концерн Volkswagen, внедрив на своих моделях в середине 2000-х годов преселективный «робот» с двумя сцеплениями (DSG). В таких трансмиссиях четные и нечетные передачи, расположены на отдельных валах, оснащенных индивидуальными сцеплениями.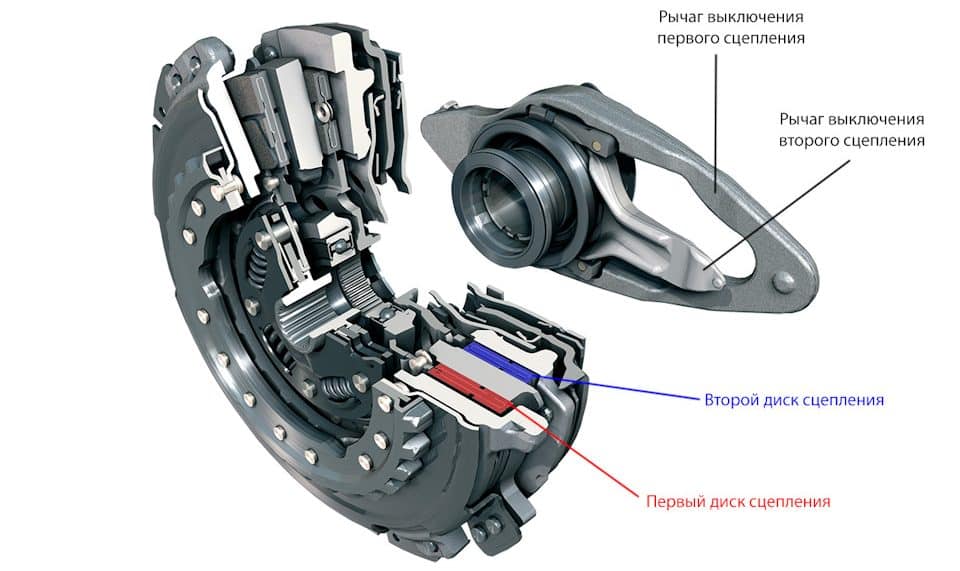
Новый тип КП хоть и стал совсем недешевым в производстве, но избавился от медлительности первых «роботов» и даже смог обеспечить автомобилю динамику разгона лучше, чем у версий с обычной «механикой». В дальнейшем многие ведущие автопроизводители также начали переходить на подобные “автоматы”, заказывая их у ведущих производителей трансмиссий.
Впрочем, в некоторых случаях остались вопросы к надежности отдельных КП данного типа. Но в сравнении с прежним «роботом» плавность и скорость переключений выросла просто несравнимо.
В подтверждение этого превосходства отметим, что в настоящий момент большинство брендов уже отказались от применения «роботов» на базе классических механических КП и в ближайшем будущем такая трансмиссия может уйти в историю.
Помимо «скорострельности», современные роботизированные КП превосходят классические «автоматы» и по экономичности. «Роботы» вполне способны помогать двигателю расходовать топливо на уровне версий с «механикой».
Актуальные Автоновости
[su_custom_gallery source=»taxonomy: post_tag/1579,1501,1275″ limit=»3″ link=»post» target=»blank» width=»190″ height=»190″ title=»always»]
Классический автомат
Казалось бы, будущее «гидротрансформаторных автоматов» предрешено, тем не менее, «старая гвардия» не спешит сдавать свои позиции.
Во-первых, развитие таких трансмиссий также не стоит на месте. Хотя у многих автолюбителей «классическая» АКП ассоциируется с морально устаревшими четырехступенчатыми «автоматами», которые не спешат переключать скорости и не особо заботятся об экономии топлива.
На самом деле такие коробки передач встречаются сейчас только на бюджетных моделях, да и то довольно редко. Подавляющая часть «автоматов» сегодня имеют минимум шесть скоростей и предлагают функцию ручной смены передач.
Более такого, производители активно увеличивают количество ступеней в таких КП, чтобы добиться лучшей экономичности. На автомобилях стоимостью выше среднего все чаще появляются восьми- и даже девятидиапазонные трансмиссии, а некоторые бренды, например Ford, уже завлекают клиентов «автоматами» на 10 (!) ступеней.
Большинство «роботов» не могут справиться с большим крутящим моментом мощных двигателей. Конечно, можно привести пример нескольких суперкаров с роботизированными КП, включая 1000-сильный Bugatti Veyron, но это скорее исключения, подтверждающие правило, тем более, что владельцы спортивных авто не особо беспокоятся о длительности ресурса таких КП.
Также роботизированными трансмиссиями не оснащаются полноценные внедорожники, потому что на сроке службе «роботов» негативно сказываются продолжительные пробуксовки на бездорожье и рывки из-за изменения сцепных свойств при контакте четырех колес с дорогой. Все это по большому счету не очень полезно и для обычных АКП.
Автомат или робот
Разница между «классическим автоматом» и «роботизированной» механикой с каждым годом уменьшается. Если «роботы» сохранят темпы “самосовершенствования”, подтянув надежность и выносливость, то «гидротрансформаторам» придется серьезно потесниться.
Как вам статья?
Amazon вступает в эпоху роботов.
 Что это значит для его работников? | Amazon
Что это значит для его работников? | AmazonЗапертый в металлической клетке в углу склада Amazon площадью 350 000 кв. футов недалеко от Бостона на прошлой неделе одинокий желтый робот-манипулятор сортировал посылки, готовя товары к отправке клиентам, которые требуют еще более быстрой доставки. Вскоре к ней присоединятся другие, что может означать конец тысяч рабочих мест и, как утверждает Amazon, создание тысяч других.
Пока робот работал, на экране отображался прогресс. Он тщательно упаковал тюбик с протеиновым порошком, затем пришла коробка с кольцами для салфеток, затем… тюбик с кремом от геморроя. Пока 100 журналистов со всего мира делали снимки, кто-то переключил экран, чтобы скрыть сливки.
В один прекрасный день робот по имени Воробей сможет выполнять работу сотен тысяч людей, которых сейчас нанимает Amazon, чтобы сортировать 13 миллионов посылок, которые она доставляет каждый год. Используя компьютерное зрение и искусственный интеллект, Amazon говорит, что Sparrow уже может идентифицировать около 65% запасов своих продуктов, сообщать, поврежден ли предмет, и выбрасывать его, а также настраивать свою «руку» на присоске для работы с различными объектами — все работы, которые в настоящее время выполняются человеческими руками. . По мере того, как он учится, он становится лучше день ото дня.
. По мере того, как он учится, он становится лучше день ото дня.
Sparrow, выпуск которого, вероятно, начнется в следующем году, был лишь одним из новой армии роботов, впервые представленных на конференции Amazon «Delivering the Future» в прошлый четверг. Среди других нововведений — автономный зеленый робот по имени Proteus — гигантский двойник Roomba, способный перемещать тяжелые грузы по огромным складам. Компания также продемонстрировала свой новейший беспилотник, который, как она надеется, позволит компании доставлять 500-метровые посылки по воздуху к концу десятилетия. Другой угол склада Amazon BOS27 был украшен искусственной травой, искусственными фасадами домов с приветственными ковриками и гигантским фургоном с электроприводом, оснащенным технологией, которая информирует водителей о лучших маршрутах и дает «инструктаж» для лучшего вождения. За белым частоколом на лужайке сидел дрон — изображение того, как, по мнению Amazon, миллионы ее клиентов однажды получат свои заказы.
2020-е годы станут «эпохой прикладной робототехники», сказал Тай Брэди, главный технолог Amazon Robotics. «Роботы будут выполнять значимые задачи и расширять возможности человека. Мне кажется, что для этого понадобилось 50 лет. Это увлекательно!»
В последние годы Amazon стала одним из крупнейших в мире частных работодателей с фондом заработной платы более 1,6 миллиона человек по состоянию на 2021 год. Этот рост не прошел безболезненно. Amazon изо всех сил борется за то, чтобы остановить американских складских рабочих, возмущенных низкой заработной платой и неустанным давлением со стороны профсоюзов, а Уолл-стрит критически относится к предполагаемому чрезмерному найму сотрудников. Роботы-упаковщики, роботы-перевозчики и роботы-доставщики могут стать ответом на эти вопросы.
Брейди не согласен. Люди предсказывали, что роботы разрушат рынок труда на десятилетия. Еще в 1933 году экономист Джон Мейнард Кейнс предсказал грядущую широко распространенную технологическую безработицу «из-за того, что мы открыли средства экономии использования труда, опережающие темпы, с которыми мы можем найти новые применения труда».
Еще в 1933 году экономист Джон Мейнард Кейнс предсказал грядущую широко распространенную технологическую безработицу «из-за того, что мы открыли средства экономии использования труда, опережающие темпы, с которыми мы можем найти новые применения труда».
— Я просто этого не вижу, — сказал Брейди. «Мы сделали наши первые серьезные инвестиции в робототехнику более 10 лет назад, и за эти 10 лет мы создали более миллиона рабочих мест». По его словам, большее количество роботов повысит эффективность складов, а это означает, что они смогут хранить больше товаров, Amazon будет продавать больше товаров, и потребуется больше людей, чтобы обеспечить бесперебойную работу.
«Потребность в том, чтобы люди решали проблемы и руководствовались здравым смыслом, всегда будет», — сказал он. «Мы далеки от этого с робототехникой. Это даже не близко. У нас есть миллионы лет эволюции человеческого мозга, питающегося от 20 ватт и банана, это невероятно».
Робот-манипулятор Sparrow будет выпущен в следующем году.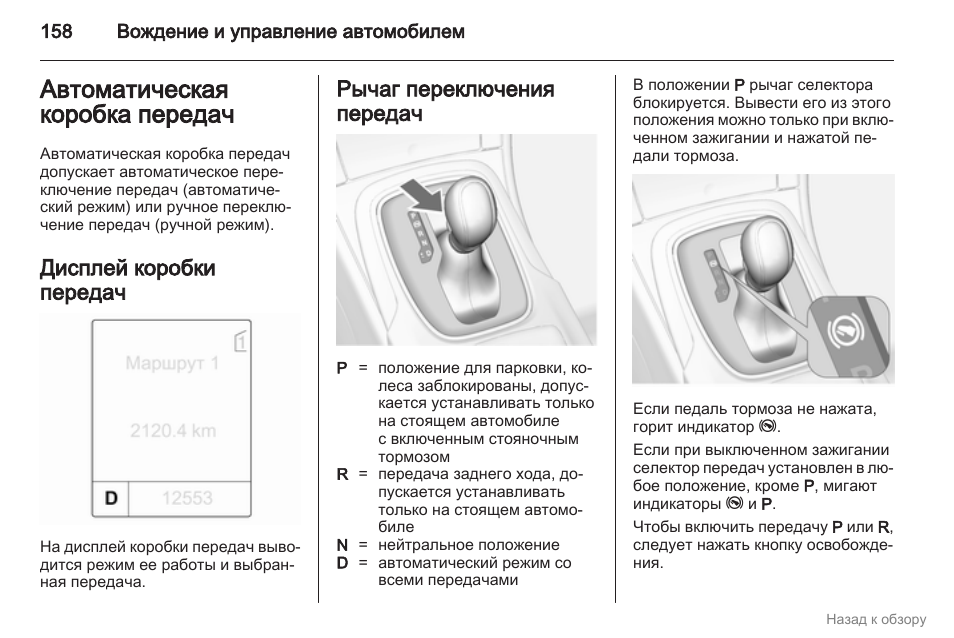 Фотография: Amazon
Фотография: AmazonБрейди может быть прав в отношении рабочих мест. В недавнем отчете Бюро статистики труда правительства США говорится, что идея о том, что новая эра умных машин приведет к сокращению рабочих мест, получила «мало поддержки». У экономистов даже есть термин для этого — заблуждение «компа труда». Инновации могут уничтожить профессию, но не существует фиксированного количества рабочих мест, и их место занимают новые. Например, рабочие места на складах заменили рабочие места в розничной торговле, поскольку онлайн-покупки уничтожили торговые центры.
Но все эти изменения не всегда хороши для рабочих. В статье для Центра труда Университета Беркли Бет Гутелиус и Ник Теодор также пришли к выводу, что технические инновации на складах вряд ли приведут к значительным потерям рабочих мест. Но они утверждали, что работодатели «могут использовать технологии таким образом, чтобы снизить требования к квалификации для рабочих мест, чтобы сократить время обучения и затраты на текучесть кадров. Это может иметь неблагоприятные последствия для работников, такие как стагнация заработной платы и отсутствие гарантий занятости».
Это может иметь неблагоприятные последствия для работников, такие как стагнация заработной платы и отсутствие гарантий занятости».
Такие аргументы вряд ли замедлят революцию роботов Amazon. Компания является крупнейшим производителем промышленных роботов в мире. Его заводы в Бостоне уже производят 330 000 роботов в год. И все это для еще более быстрой доставки зубной пасты или крема от геморроя. И это то, чего хотят люди, сказал Брейди: «Мы будем реагировать и будем зациклены на том, чего хочет клиент, и если они хотят получить зубную пасту быстрее, мы поможем им получить зубную пасту быстрее», — сказал он.
Что такое робот? | Робототехника: очень краткое введение
Фильтр поиска панели навигации Oxford AcademicРобототехника: очень краткое введение Очень краткое введениеИскусственный интеллектИстория науки и техникиРобототехникаКнигиЖурналы Термин поиска мобильного микросайта
Закрыть
Фильтр поиска панели навигации Oxford AcademicРобототехника: очень краткое введение Очень краткое введениеИскусственный интеллектИстория науки и техникиРобототехникаКнигиЖурналы Термин поиска на микросайте
Расширенный поиск
Иконка Цитировать Цитировать
Разрешения
- Делиться
- Твиттер
- Подробнее
Cite
Winfield, Alan,
‘Что такое робот?’
,
Робототехника: очень короткое представление
, очень короткие представления
(
Оксфорд,
2012;
онлайн Edn,
Oxford Academic
, 24 сентября 2013
), HTTPS: HTTPS: HTTPS: HTTPS: HTTPS: HTTPS: HTTPS: HTTPS: HTTPS: HTTPS: HTTPS: HTTPS: HTTPS: //doi. org/10.1093/actrade/9780199695980.003.0001,
org/10.1093/actrade/9780199695980.003.0001,
, по состоянию на 27 декабря 2022 г.
Выберите формат Выберите format.ris (Mendeley, Papers, Zotero).enw (EndNote).bibtex (BibTex).txt (Medlars, RefWorks)
ЗакрытьФильтр поиска панели навигации Oxford AcademicРобототехника: очень краткое введение Очень краткое введениеИскусственный интеллектИстория науки и техникиРобототехникаКнигиЖурналы Термин поиска мобильного микросайта
Закрыть
Фильтр поиска панели навигации Oxford AcademicРобототехника: очень краткое введение Очень краткое введениеИскусственный интеллектИстория науки и техникиРобототехникаКнигиЖурналы Термин поиска на микросайте
Advanced Search
Abstract
В разделе «Что такое робот?» рассматриваются три определения «робота»: искусственное устройство, которое может ощущать свое окружение и целенаправленно действовать в нем или в нем; воплощенный искусственный интеллект; или машина, которая может автономно выполнять полезную работу.
Ключевые слова: искусственный интеллект, кибернетика, жизнь, магия, природа, естественная история, симуляция, Алан Тьюринг, вакуум
Субъект
Искусственный интеллектИстория науки и техникиРобототехника
Серия
Очень краткое знакомство
В настоящее время у вас нет доступа к этой главе.
Войти
Получить помощь с доступомПолучить помощь с доступом
Доступ для учреждений
Доступ к контенту в Oxford Academic часто предоставляется посредством институциональных подписок и покупок. Если вы являетесь членом учреждения с активной учетной записью, вы можете получить доступ к контенту одним из следующих способов:
Если вы являетесь членом учреждения с активной учетной записью, вы можете получить доступ к контенту одним из следующих способов:
Доступ на основе IP
Как правило, доступ предоставляется через институциональную сеть к диапазону IP-адресов. Эта аутентификация происходит автоматически, и невозможно выйти из учетной записи с IP-аутентификацией.
Войдите через свое учреждение
Выберите этот вариант, чтобы получить удаленный доступ за пределами вашего учреждения. Технология Shibboleth/Open Athens используется для обеспечения единого входа между веб-сайтом вашего учебного заведения и Oxford Academic.
- Щелкните Войти через свое учреждение.
- Выберите свое учреждение из предоставленного списка, после чего вы перейдете на веб-сайт вашего учреждения для входа.
- Находясь на сайте учреждения, используйте учетные данные, предоставленные вашим учреждением.
 Не используйте личную учетную запись Oxford Academic.
Не используйте личную учетную запись Oxford Academic. - После успешного входа вы вернетесь в Oxford Academic.
Если вашего учреждения нет в списке или вы не можете войти на веб-сайт своего учреждения, обратитесь к своему библиотекарю или администратору.
Войти с помощью читательского билета
Введите номер своего читательского билета, чтобы войти в систему. Если вы не можете войти в систему, обратитесь к своему библиотекарю.
Члены общества
Доступ члена общества к журналу достигается одним из следующих способов:
Войти через сайт сообщества
Многие общества предлагают единый вход между веб-сайтом общества и Oxford Academic. Если вы видите «Войти через сайт сообщества» на панели входа в журнале:
- Щелкните Войти через сайт сообщества.
- При посещении сайта общества используйте учетные данные, предоставленные этим обществом.
 Не используйте личную учетную запись Oxford Academic.
Не используйте личную учетную запись Oxford Academic. - После успешного входа вы вернетесь в Oxford Academic.
Если у вас нет учетной записи сообщества или вы забыли свое имя пользователя или пароль, обратитесь в свое общество.
Вход через личный кабинет
Некоторые общества используют личные аккаунты Oxford Academic для предоставления доступа своим членам. Смотри ниже.
Личный кабинет
Личную учетную запись можно использовать для получения оповещений по электронной почте, сохранения результатов поиска, покупки контента и активации подписок.
Некоторые общества используют личные аккаунты Oxford Academic для предоставления доступа своим членам.
Просмотр учетных записей, вошедших в систему
Щелкните значок учетной записи в правом верхнем углу, чтобы:
- Просмотр вашей личной учетной записи и доступ к функциям управления учетной записью.