
Как Сделать Простого Робота Своими Руками (Схемы)
29 марта 2023
Собираем BrushBot — Вибрирующего Робота из Щетки
28 марта 2023
Собираем Art Bot — Рисующего Вибро-Робота (DIY)
24 марта 2023
Bristle Robot — Простой Виброробот из Зубной Щетки и Вертолетика
27 мая 2021
Собираем Силиконовый Мягкотелый Робот Своими Руками (DIY)
26 сентября 2018
Собираем Подводный Дрон с Видеокамерой Своими Руками (DIY)
27 мая 2013
Собираем Простейший Робот Buck Своими Руками (DIY)
27 ноября 2012
Собираем Робота Walker из Трубки Своими Руками (DIY)
1 ноября 2012
Собираем Простой Робот Lobsterbot Своими Руками (DIY)
31 октября 2012
Собираем Боевой Мини-Робот Battlebot Своими Руками (DIY)
18 октября 2012
Собираем Простой Робот Mousebot Своими Руками (DIY)
30 июля 2012
Собираем Простой Светочувствительный Виброробот Bristlebot (DIY)
30 июля 2012
Собираем Робот LightBot для Автоматической Подсветки (DIY)
25 июля 2012
Собираем Легкий Робот из Старого Фотоаппарата (DIY)
25 июля 2012
Собираем Робот из CD-Диска Своими Руками (DIY)
24 июля 2012
Собираем Вибрирующий Робот-Насекомое из Жестяной Банки
3 июля 2012
Собираем Простой Балансирующий Робот WobblyBot (DIY)
13 мая 2012
Собираем Простейший Робот MouseBot Своими Руками (DIY)
Делаем самого простого робота своими руками
Сделать самый простой робот под силу даже тем, кто только взял в руки паяльник.
Преимущественно наш робот (в зависимости от конструкции) будет бегать на свет либо наоборот убегать от него, бежать вперед в поисках луча света или же пятиться как крот назад.
Для нашего будущего «искусственного интеллекта» понадобятся:
- Микросхема L293D
- Маленький электромотор М1 (его можно вытащить из игрушечных автомобилей)
- Фототранзистор и резистор с номиналом 200 Ом.
- Провода, батарейка и, конечно же, сама платформа, где это все будет размещаться.
Если в конструкцию добавить еще парочку ярких светодиодов, то легко можно добиться, того, что робот просто будет бегать за рукой или даже следовать по светлой или темной линии. Наше создание будет типичным представителем роботов класса BEAM. Принцип поведения таких роботов заключается на «фоторецепции», то есть свет, в данном случае, будет выступать в качестве источника информации.
Наш робот будет двигаться вперед, при попадании на него луча света. Такое поведение устройства называется «фотокинезисом» – ненаправленное увеличение или уменьшение подвижности в ответ на изменение уровня освещенности.
В нашем устройстве, как было сказано выше, использовался фототранзистор n-p-n структуры – PTR-1 в качестве фотосенсора. Здесь можно использовать не только фототранзистор, но и фоторезистор или фотодиод, так как принцип работы у всех элементов одинаковый.
На рисунке сразу приведена монтажная схема робота. Если Вы еще не достаточно хорошо знакомы с техническими условными обозначениями, то, здесь исходя из этой схемы, несложно будет понять принципы обозначения и подсоединения элементов друг к другу.
GND. Провода, соединяющие различные элементы схемы с «землей» (отрицательный полюс источника питания), обычно на схемах не отображают полностью. Вместо этого рисуют маленькую черточку, обозначающую соединение с «землей». Иногда, рядом с черточкой пишут «GND» – от анг. слова «ground» – земля.
Vcc. Данное обозначение показывает, что через эту часть схема соединена с источником питания – Положительный полюс! Иногда на схемах вместо этих букв часто пишут номинал тока. В данном случае +5V.
В данном случае +5V.
Принцип действия робота.
При попадании на фототранзистор (на схеме он указан как PRT1) луча света, на выходе микросхемы INPUT1 появляется положительный сигнал, который заставляет мотор М1 – работать. И наоборот, когда луч света перестает освещать фототранзистор – сигнал на выходе микросхемы INPUT1 исчезает, следовательно, и мотор останавливается.
Резистор R1 в данной схеме предназначен компенсации, проходящего тока через фототранзистор. Номинал резистора 200 Ом – конечно можно сюда припаять резисторы и с другими показателями номиналов, но следует помнить, что от номинала будет зависеть чувствительность фототранзистора, а значит и работоспособность самого робота.
Если номинал резистора будет большим, то робот станет реагировать только на очень яркий луч света, а если небольшим – то и чувствительность будет намного выше.
Коротко говоря – не следует использовать в данной схеме резисторы с сопротивлением менее 100 Ом, иначе фототранзистор может просто-напросто перегреться и выйти из строя.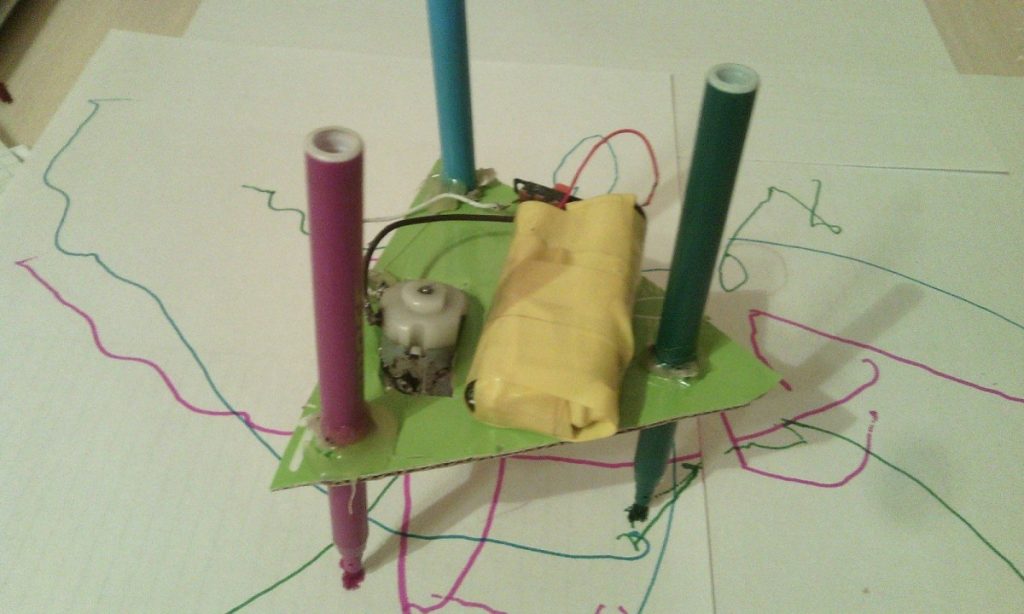
В общем, пища для размышления вам дана. Обратите внимание на схему самой микросхемы. Здесь четко изображены все входы и выходы сигналов. Комбинируя способы подключения моторчика и фоторезистора, вы легко можете изменять поведение этого робота. Более подробно о роботах можно узнать у нашего друга modelist-konstruktor.com
Рука робота «сделай сам» — Музей науки Буффало
Перейти к основному содержаниюЗакрыть поиск
Просмотреть все задания
Рука робота «Сделай сам»
Развлекайтесь наукой всей семьей! Выполняйте задания под присмотром родителей.
Материалы:
- Плотная бумага или тонкий картон (хорошо подойдут коробки из-под хлопьев, крекеров или салфеток)
- Пряжа или толстая нить
- 5 больших бусин (например, пластиковые бусины пони)
- 2 соломинки
- Ножницы
- Лента
- Карандаш
Процедура
1. Обведите руку на картоне и вырежьте ее.
Обведите руку на картоне и вырежьте ее.
2. Нарежьте соломинки на 1-дюймовые кусочки (или 1/2 дюйма, если у вас маленькая рука!).
3. С помощью скотча прикрепите кусочки соломинки к руке (см. верхнее изображение).
4. Сложите картон между соломинками — это будет имитировать ваши суставы (см. красные линии на верхнем изображении).
5. Отрежьте пять отрезков пряжи длиной 12 дюймов и привяжите к концу каждого по бусине.
6. Проденьте каждый кусок пряжи через кусочки соломинки, начиная с кончиков пальцев и заканчивая ладонью. Каждый палец должен управляться одной струной.
7. Используйте струны вместе или по отдельности, чтобы управлять движением каждого из пальцев. Поздравляю с новой рукой-роботом!
8. Обязательно сделайте снимок, чтобы поделиться им в комментариях на Facebook на страницах Музея науки Буффало или заповедника Тиффт!
О чем все это?
Что заставляет нас двигаться? Как мы прыгаем, плывем, пожимаем плечами, мчимся или растягиваемся? Внутри нашего тела постоянно происходит множество различных действий.
Знаете ли вы, что не все эти движения выполняются только мышцами? Наши пальцы необычны тем, что в них нет мышц! Они опираются на ряд тонких, прочных волокон, называемых сухожилиями, которые соединяют кости наших пальцев с мышцами рук.
Натяжение струн на вашей руке робота действует подобно сухожилиям в нашей руке, которые тянут наши кости в результате сгибания мышц руки. Когда мы отпускаем струну, пальцы снова становятся плоскими, как будто освобождается сухожилие.
Попробуй!
Ты видишь сухожилия в своих руках? Попробуйте сделать свою руку похожей на фото справа. Это кости или сухожилия, которые вы видите? Откуда вы знаете?
Возьмите правое предплечье левой рукой. Сожмите кулак, вытяните ладонь, пошевелите пальцами — что вы чувствуете? Почему?
Где еще могут быть сухожилия? Все ли сухожилия делают одно и то же?
Другие мероприятия на большой виртуальной научной ярмарке
Мини-гольф своими руками
Хотите верьте, хотите нет, но мини-гольф основан на математике и физике.
 Стреляйте в одну дырку в этой виртуальной научной ярмарке! Открыть активность
Стреляйте в одну дырку в этой виртуальной научной ярмарке! Открыть активность
Закрыть меню
Открытие дома — Детский центр открытий Канзаса
Расходные материалы:
- Лента.
- Ножницы.
- Картон или картон.
- Стандартные соломинки для питья.
- Соломинки для напитков Pearl или соломинки большего диаметра.
- Пряжа или шпагат.
Как добраться:
- Шаг 1: Соберите припасы.
- Шаг 2: Создайте свою руку. Обведите свою руку на картоне или картоне. Вырежьте обведенную руку (попробуйте вырезать ее немного больше, чем линия, которую вы нарисовали).
- Шаг 3: Создайте соединения. Отметьте суставы пальцев на вырезе. Нарисуйте суставы прямыми или изогнутыми.
- Шаг 4: Соберите все вместе!
- Сложите суставы пальцев по линиям.

- Обрежьте стандартные соломинки для питья по размеру (оставьте небольшой зазор между линиями, чтобы облегчить продевание нити).
- Прикрепите кусочки соломинки скотчем к руке.
- Проденьте пряжу через кусочки соломинки. Каждый палец будет иметь свою длину пряжи. Проденьте все пять кусочков пряжи через большую соломинку.
- Сложите суставы пальцев по линиям.
- Шаг 5: Играй! Что умеет ваша роботизированная рука?
Способы расширения:
- Ученые, работающие в области робототехники, часто используют человеческое тело как источник вдохновения для движения и работы роботов. Какие еще картонные части вы можете построить, чтобы они работали как ваше тело? Как эти части могут решить проблемы?
- Насколько большим вы могли бы это сделать? Попробуйте сделать большую руку!
- Что произойдет, если потянуть только за одну ниточку, это сработает? Не могли бы вы подобрать что-нибудь?
- Попробуйте взять предмет рукой.
 Он работает так же хорошо, как ваша рука? Почему или почему нет?
Он работает так же хорошо, как ваша рука? Почему или почему нет? - Какие жесты ты можешь делать рукой? Можешь поставить палец вверх?
- Что произойдет, если вы используете резиновую ленту вместо веревки? Как это изменит движение руки?
Что изучают дети:
- Анатомия: струны в вашей роботизированной руке функционируют так же, как сухожилия в вашей собственной руке, которые соединяют мышцы с костями и позволяют сгибать пальцы. Ваши мышцы создают тягу, которая заставляет ваши пальцы сгибаться и позволяет вам брать предметы, как ваша рука робота.
- Базовые инженерные навыки. Инженеры решают задачи с ограничениями, в данном случае ограниченными материалами и давлением воздуха. Они учатся решать проблемы, используя процесс инженерного проектирования: задавая вопросы, находя решения, создавая, тестируя и улучшая.
- Мелкая моторика. Дети тренируются, используя маленькие мышцы рук, которые позже используются для письма.

- Причина и следствие: посмотрите, как рука реагирует, когда вы дергаете за ниточки.
- Материалы. Тело состоит из определенных типов материалов, которые создают необходимые движения.
- Моделирование. Моделирование — важный метод в карьере STEAM. Модели помогают профессионалам изучать и изучать определенный предмет.
- Дополнительная литература: узнайте, как настоящие роботизированные руки помогают людям с ампутированными конечностями восстановить функции
Словарь:
- Сухожилие: полоса соединительной ткани, соединяющая мышцу с костью. Мышцы тянут сухожилия, чтобы создать движение в вашей руке.
- Ткань тела. Группа клеток, которые выглядят одинаково и работают вместе в организме.
- Мышцы. Совокупность тканей, способных сокращаться, что позволяет вам двигать телом или удерживать его в определенном положении.
- Напряжение: Состояние сильного растяжения.
- Тяга: Тяга — это сила, с которой объект приближается.
