Как сдать экзамен на автодроме без ошибок и с первого раза?
В современном мире человек без автомобиля – будто птица без крыльев. Кто-то может не согласиться, но статистика – наука упрямая, и с фактами не поспоришь. Ведь на тысячу жителей нашей страны приходится в среднем около 260 автомобилей, а это значит, что более четверти населения в основном не передвигаются пешком. К тому же, эта цифра постоянно стремительно вырастает, потому что ежедневно кто-то приобретает себе автомобиль. Да, с автомобилями всё выглядит достаточно просто, главное, чтобы были средства на их покупку, но вот с получением водительских прав ситуация усложняется.
- Факторы, на которые нужно обратить внимание при сдаче упражнений на автодроме
- Документы для сдачи экзамена на автодроме
- Какую одежду выбрать?
- Нужны ли с собой успокоительные, и стоит ли их употреблять
- Техника правильного выполнения упражнений
- Подстройте автомобиль под себя
- Как проходить въезд в гараж
- Как правильно выполнять параллельную парковку
- Сдаем змейку
- Разворачиваемся в ограниченном пространстве правильно
- Заезжаем на эстакаду не допуская ошибок
- Выполняем последовательность действий не спеша
Факторы, на которые нужно обратить внимание при сдаче упражнений на автодроме
Прежде чем предоставить будущему водителю возможность выехать в город, инспектор МРЭО ГАИ должен проверить, насколько хорошо ученик автошколы освоил управление автомобилем. Только после практического экзамена, на котором он покажет своё умение чувствовать габариты автомобиля и способность не только правильно парковать машину, но и заезжать в гараж задним ходом, ученика можно будет допустить к экзаменам в городе.
Только после практического экзамена, на котором он покажет своё умение чувствовать габариты автомобиля и способность не только правильно парковать машину, но и заезжать в гараж задним ходом, ученика можно будет допустить к экзаменам в городе.
Данная практика способствует точному отбору курсантов автошколы ещё в условиях автодрома. Те же, у кого подготовка недостаточно хороша, и кто может создать аварийную ситуацию на дороге, сразу же «отсеиваются», не проходя далее.
Документы для сдачи экзамена на автодроме
Для допуску к экзаменам на автодроме необходим следующий перечень документов:
— два экземпляра цветных фотографий 3,5 х 4,5 см на матовой основе.
— медицинская справка, свидетельствующая о пригодности к управлению теми или иными категориями средств передвижения.
— паспорт либо документ, который может его заменить, и в котором указана регистрация по месту прописки либо пребывания.
— идентификационный код.
— выданная автошколой экзаменационная карточка.
Какую одежду выбрать?
Ответ на этот вопрос предельно прост – ту, в которой вам наиболее комфортно находиться в автомобиле и обучаться вождению. Но мы всё же несколько проинструктируем вас касательно удобной экипировки для автодрома.
• Первое – обувь. Лучше обуваться в кроссовки на тонкой подошве либо кеды. И чем подошва тоньше – тем лучше. В такой обуви можно хорошо контролировать силу нажатия на педали, а это вам пригодится. Кроссовки не должны быть сильно широкими, ведь в противном случае одним «ластом» можно ненароком и две педали зажать одновременно.
В отношении будущих автоводительниц не рекомендуется обувать каблуки. Если на улице неподходящие погодные условия для таковой обуви, тогда возьмите, как в школе, сменку с собой. Она не будет вам мешать, зато, переобувшись в автомобиле, вы будете чувствовать себя комфортнее, а, следовательно, и увереннее. Неудобный вариант по погоде доставит уйму хлопот.
• Второе – одежда. Тут тоже всё просто. Выбирайте её, чтобы вам было максимально комфортно. Тяжёлую и сковывающую движения верхнюю одежду лучше снять и положить на заднее сиденье. Не рекомендуем одевать что-то с широкими рукавами. Мешковатая одежда или разного рода балахоны не подойдут. Лучше экипироваться во то-то лёгкое спортивного плана.
Девушкам и женщинам не стоит красоваться на автодроме в мини-юбках и на шпильках. Все понимают, что вы хотите всегда оставаться красивыми, но это экзамен по вождению, а не отбор фотомоделей. То же касается и парней и мужчин в дорогих деловых костюмах.
Нужны ли с собой успокоительные, и стоит ли их употреблять
Как правило, будущие водители заранее себя настраивают на то, что будут сильно переживать на экзамене. А посему по привычке потребляют все подряд наиболее действенные успокоительные. Но это не панацея от проблемы, а даже, скорее, наоборот – её «эскалатор». Подобные лекарственные средства замедляют реакцию человека, сводя на нет все результаты экзамена. Рекомендуется не принимать данные препараты. Лучше провести небольшой аутотренинг по настройке себя на успешный результат.
Рекомендуется не принимать данные препараты. Лучше провести небольшой аутотренинг по настройке себя на успешный результат.
Техника правильного выполнения упражнений
Как мы говорили в предыдущем разделе, лучше максимально успокоиться и настроиться только на положительный результат. Вы же не проигрываете ничего, садясь за руль учебного автомобиля – квартиру, например. Поэтому приведём вам несколько практических советов, которые помогут вам хорошо сдать экзамен на автодроме.
1. Всё лишнее оставьте дома или где-то за пределами автомобиля, ведь это будет вас отвлекать от единственно главного в данный момент – экзамена. Ваша голова не должна быть забита тем, кто вам написал смс, или «хоть бы не забыть зонтик».
2. Старайтесь одним из первых выполнить все упражнения. Ведь, глядя на чужие ошибки и неудачи, вы станете более подавленным, а это повлияет на ваше эмоциональное состояние и будет стараться выбить из колеи.
3. Не думайте постоянно о том, как же сдать этот экзамен. Если перед вами кто-то уже выполнял упражнения, внимательно проанализируйте все допущенные ими ошибки и постарайтесь их избежать. Это, пожалуй, наиболее ценный опыт для вас в экзаменационный день.
Не думайте постоянно о том, как же сдать этот экзамен. Если перед вами кто-то уже выполнял упражнения, внимательно проанализируйте все допущенные ими ошибки и постарайтесь их избежать. Это, пожалуй, наиболее ценный опыт для вас в экзаменационный день.
4. Отключите все средства связи. Любые звонки, смс, сообщения в социальные сети, сводящиеся к одному – сопереживанию, попросту будут вас отвлекать от выполнения какого-либо упражнения. Обидно ведь допустить ошибку из-за переживающих близких и друзей.
5. Одевайтесь только в удобную и практичную одежду и обувь.
6. Желательно приехать на автодром как можно раньше и поговорить с инструктором относительно прохождения дополнительного круга по автодрому. Таким образом вы закрепите в очередной раз все элементы и со спокойной душой будете ждать своей очереди.
7. Ну и самое главное – не волнуйтесь! Помните, что у вас всё выйдет!
Подстройте автомобиль под себя
Прежде чем приступить к экзамену, необходимо тщательно подготовить ваше место водителя:
1. Отрегулируйте первым делом сиденье. Подвигайтесь вперёд-назад, понажимайте педали. Нужно найти максимально удобное положение. Затем тщательно отрегулируйте спинку водительского кресла.
Отрегулируйте первым делом сиденье. Подвигайтесь вперёд-назад, понажимайте педали. Нужно найти максимально удобное положение. Затем тщательно отрегулируйте спинку водительского кресла.
2. Далее идёт регулировка положения боковых зеркал. От этого зависит правильное выполнение некоторых элементов, например, «заезд в гараж».
3. И третье – снимать автомобиль с ручника следует перед началом движения, в противном случае двигатель может заглохнуть. Также при движении делать этого нельзя, у вас будет ощущение, что кто-то крепко держит ваш автомобиль. По окончании выполнения упражнений не забудьте перевести рычаг коробки в положение нейтраль и поставить машину на ручной тормоз.
Как проходить въезд в гараж
Суть этого упражнения заключается в заезде автомобилем задним ходом в определённое ограниченное пространство. В реальной ситуации им может оказаться гараж, либо место на стоянке.
Для выполнения такого въезда подъедьте к линии «Старт» и полностью остановитесь.
Упражнение выполнено успешно, если автомобиль находится внутри бокса и не выходит за его пределы ни одной из своих частей. Если сбиты какие-либо элементы импровизированной конструкции или пересечена разметка, то сдающий экзамен получает пять баллов штрафа, а это автоматически приводит к невыполнению задания. Ещё три балла могут быть сняты за следующие нарушения: не была выключена передача, забыли поставить на ручник, и ещё один балл за заглохший двигатель.
Как правильно выполнять параллельную парковку
В этом случае необходимо решить задачу, аналогичную предыдущей по заезду задним ходом в импровизированное пространство. Это упражнение является имитацией парковки между двумя стоящими автомобилями.
Как и в первом варианте, нужно подъехать к разметке «Старт». После этого двигаться к ограничительной линии на задней передаче. Вращая рулевое колесо, припарковать машину. Ориентиром будут служить специальные фишки. После завершения парковки не забывайте о переключении рычага КПП в положение нейтрали и включении стояночного тормоза. Только после этого выполненное упражнение можно считать полностью завершённым.
После этого двигаться к ограничительной линии на задней передаче. Вращая рулевое колесо, припарковать машину. Ориентиром будут служить специальные фишки. После завершения парковки не забывайте о переключении рычага КПП в положение нейтрали и включении стояночного тормоза. Только после этого выполненное упражнение можно считать полностью завершённым.
Студент получает незачёт за сбитый инвентарь и пересечение специальной прерывистой метки. Три балла снимаются за единоразовое переключение заднего хода, не включение нейтрали или ручного тормоза. И, как и в предыдущем упражнении, один балл снимается за заглохший двигатель.
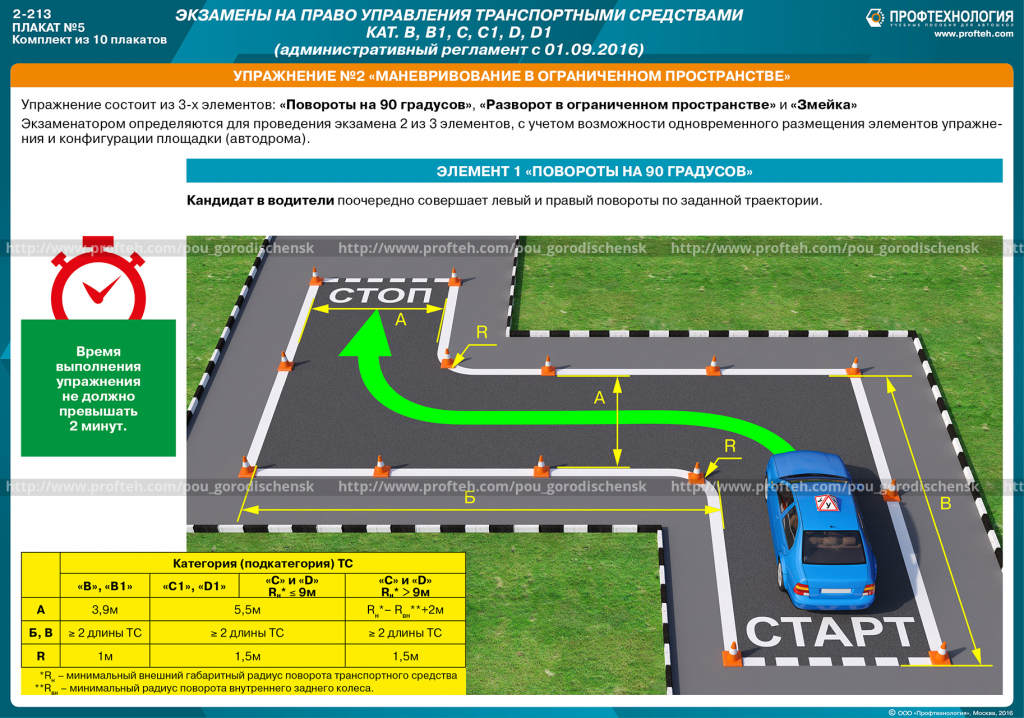
Сдаем змейку
В этой части экзамена нужно объехать все ограничивающие элементы. Их нельзя задевать либо опрокидывать. Залогом успешного выполнения упражнения является быстрое вращение рулевого колеса.
Остановитесь у линии «Старт», выключите передачу и поднимите рычаг стояночного тормоза. Далее проезжайте змейку, не задев ни одного ограничителя и не выехав за боковые сплошные. Упражнение считается завершённым после полной остановки у линии «Стоп».
Упражнение считается завершённым после полной остановки у линии «Стоп».
Упражнение не зачитывается, когда будущий водитель отклоняется от заданной траектории или пересекает стоп-линии. Три балла и один балл даются за то же самое, что и в других упражнениях.
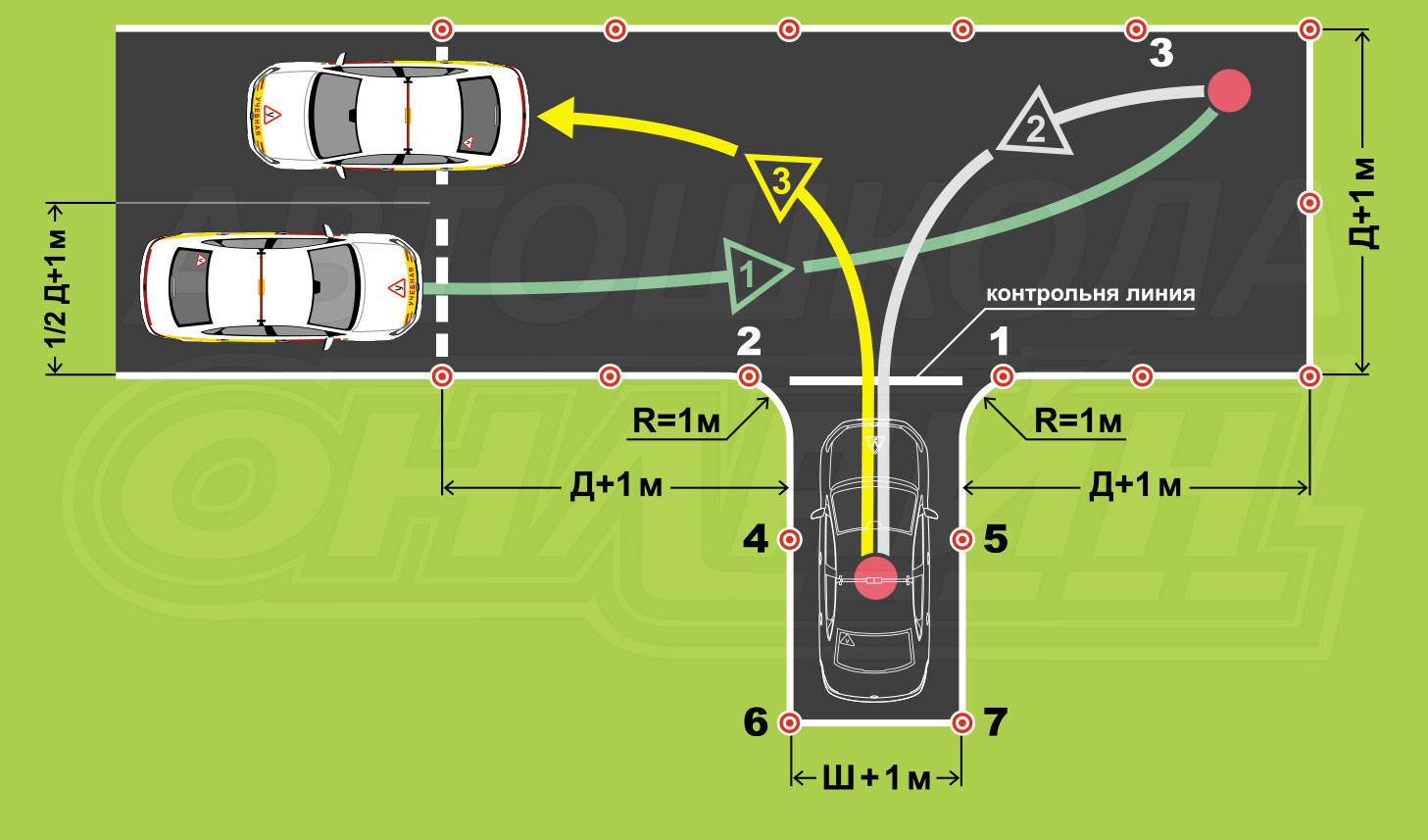
Разворачиваемся в ограниченном пространстве правильно
Это упражнение заключается в выполнении разворота на 180 градусов в узком пространстве. Начало и окончание упражнения аналогично всем вышеперечисленным. Ученик проваливает упражнение, если сбил элементы разметки, пересёк горизонтальную разметку или линию «Стоп».
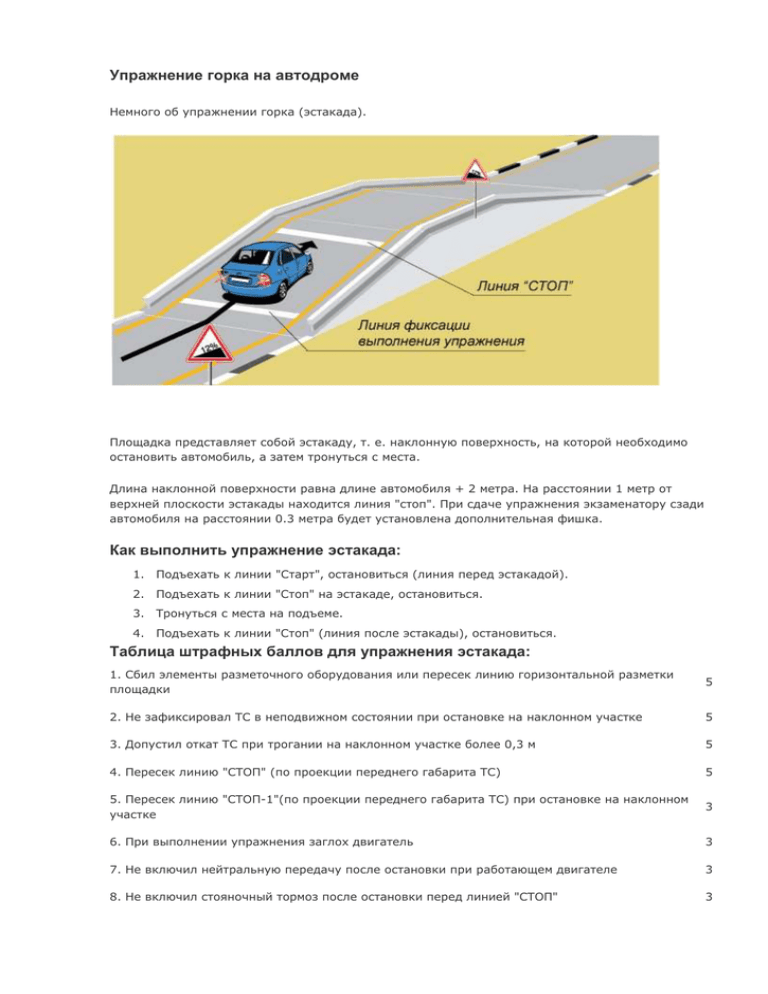
Заезжаем на эстакаду не допуская ошибок
Когда автомобиль стоит у линии «Старт», передачи выключены, а стояночный тормоз поднят, можно приступать к выполнению упражнения «Эстакада». Оно заключается в заезде на эстакаду, остановке машины у ограничительной линии, выключении передачи и поднятии рычага ручника, отпуская при этом педаль тормоза.
Начинается упражнение с самой сложной части – старта с места. Автомобиль не должен откатиться назад более чем на 30 см. По завершении машину нужно остановить у знака «Стоп» и поставить на стояночный тормоз.
Автомобиль не должен откатиться назад более чем на 30 см. По завершении машину нужно остановить у знака «Стоп» и поставить на стояночный тормоз.
Пять штрафных баллов начисляется за сбитые ограничительные элементы, не фиксацию на горке автомобиля, выезд за ограничительные линии, откат более 0,3 метра. Три балла снимают за заглохший двигатель, не выключенную передачу, забытый ручник.
Выполняем последовательность действий не спеша
На автодроме не следует гнать. Нужно двигаться размеренно на первой передаче или на задней. Это зависит от сути выполняемого упражнения. Если лишний раз не дёргать коробку, то можно лучше приспособиться к прохождению упражнений.
Таблица штрафных баллов при сдаче экзамена на права
При сдаче экамена в ГИБДД за каждую ошибку начисляются штрафные баллы. За грубые ошибки начисляется 5 штрафных баллов, за средние — 3 штрафных балла, за мелкие ошибки — 1 штрафной балл. При достижении 5 штрафных баллов экзамен считается не сданным. То есть при совершеннии любой грубой ошибки (5 баллов), либо двух средних (2х3 баллы) экзамен будет считаться не сданным.
То есть при совершеннии любой грубой ошибки (5 баллов), либо двух средних (2х3 баллы) экзамен будет считаться не сданным.
Штрафные баллы в городе и на площадке
Упражнение Разворот в ограниченном пространстве
| № | Допущенная ошибка | Штрафной Балл |
| 1 | Сбил элементы разметочного оборудования или пересек линию горизонтальной разметки площадки | 5 |
| 2 | Пересек линию «Стоп» (по проекции переднего габарита ТС) | 5 |
| 3 | Не смог развернуться при одноразовом включении передачи заднего хода | 3 |
| 4 | Не включил нейтральную передачу после остановки при работающем двигателе | 3 |
| 5 | Не включил стояночный тормоз после остановки в зоне стоянки | 3 |
| 6 | При выполнении упражнения заглох двигатель | 1 |
Упражнение Эстакада
| № | Допущенная ошибка | Штрафной Балл |
| 1 | Сбил элементы разметочного оборудования или пересек линию горизонтальной разметки площадки | 5 |
| 2 | Не зафиксировал ТС в неподвижном состоянии на наклонном участке | 5 |
| 3 | Допустил откат при трогании на наклонном участке более чем на 0,3 метра | 5 |
| 4 | Пересек линию «Стоп» по проекции переднего габарита ТС | 5 |
| 5 | При выполнении упражнения заглох двигатель | 3 |
| 6 | Пересек линию «Стоп-l» при остановке на наклонном участке | 3 |
| 7 | Не включил нейтральную передачу после остановки при работающем двигателе | 3 |
| 8 | Не включил стояночный тормоз после остановки перед линией «Стоп» | 3 |
Упражнение Змейка
| № | Допущенная ошибка | Штрафной Балл |
| 1 | Сбил элементы разметочного оборудования или пересек линию горизонтальной разметки площадки | 5 |
| 2 | Пересек линию «Стоп» (по проекции переднего габарита ТС) | 5 |
| 3 | Не включил нейтральную передачу после остановки при работающем двигателе | 3 |
| 4 | Не включил стояночный тормоз после остановки в зоне стоянки (перед линией «Стоп») | 3 |
| 5 | При выполнении упражнения заглох двигатель | 1 |
Упражнение въезд в гараж задним ходом
| № | Допущенная ошибка | Штрафной Балл |
| 1 | Сбил элементы разметочного оборудования или пересек линию горизонтальной разметки площадки | 5 |
| 2 | Пересек линию «Стоп» (по проекции переднего габарита ТС) | 5 |
| 3 | При выполнении упражнения двигатель заглох двигатель | 3 |
| 4 | Не смог въехать в бокс при одноразовом включении передачи заднего хода | 3 |
| 5 | Не включил нейтральную передачу после остановки при работающем двигателе | 3 |
| 6 | Не включил стояночный тормоз после остановки в зоне стоянки | 3 |
Упражнение Параллельная парковка
| № | Допущенная ошибка | Штрафной Балл |
| 1 | Сбил элементы разметочного оборудования или пересек линию горизонтальной разметки площадки | 5 |
| 2 | Не пересек прерывистую линию (по проекции бокового габарита ТС) | 5 |
| 3 | Не смог въехать в зону стоянки при одноразовом включении передачи заднего хода | 3 |
| 4 | Не включил нейтральную передачу после остановки при работающем двигателе | 3 |
| 5 | Не включил стояночный тормоз после остановки в зоне стоянки | 3 |
| 6 | При выполнении упражнения заглох двигатель | 1 |
Штрафные баллы в городе
| Допущенная ошибка | Пункты ПДД | Штрафной Балл |
А.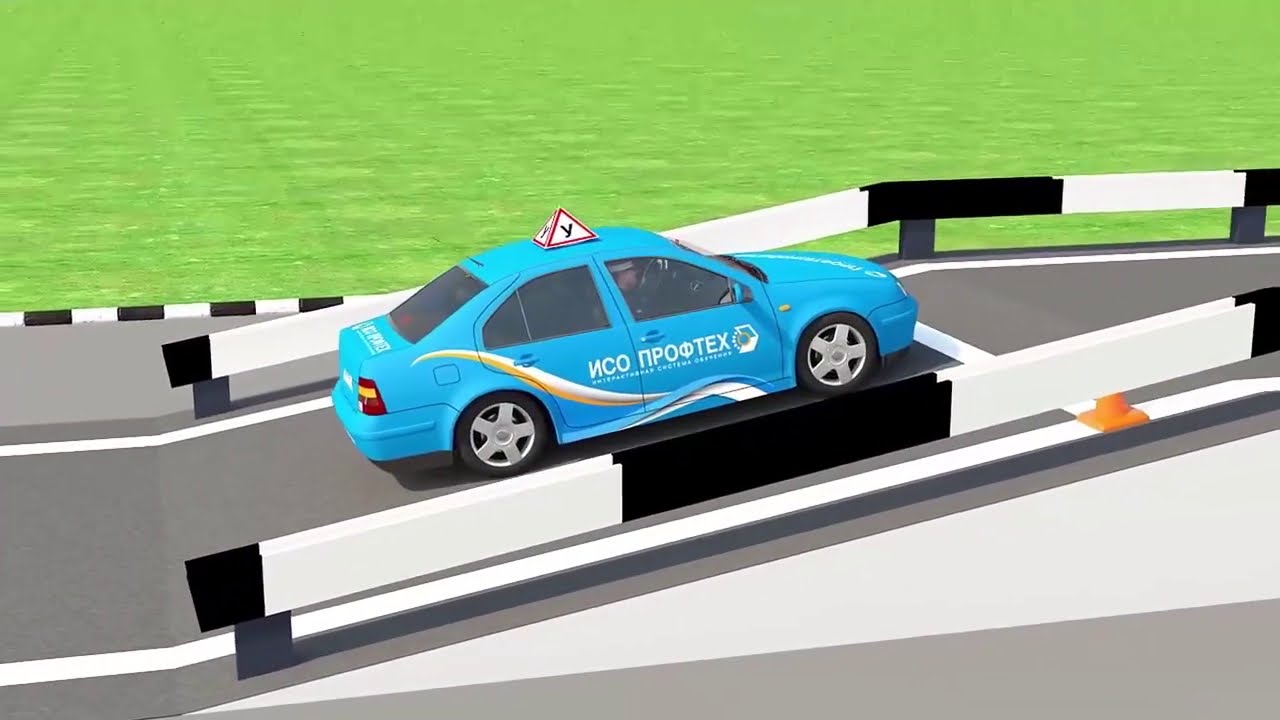 Грубые Грубые | ||
| 1.1. Не предоставил преимущество в движении водителям ТС, имеющим такое право (создал помеху) | 3.2, 8.1, 8.3-8.5, 8.8, 8.9, 11.7, 13.4-13.6, 3.8, 13.9, 13.11, 13.12, 15.1, 18.1, 18.3 | 5 |
| 1.2. Не предоставил преимущество в движении пешеходам и (или) велосипедистам, имеющим такое право | 8.3, 13.1, 14.1-14.3, 14.5, 14.6 | 5 |
| 1.3. Выехал на полосу встречного движения или на трамвайные пути встречного направления | 8.6, 9.2, 9.3, 9.6, 9.8 | 5 |
| 1.4. Проехал на запрещающий сигнал светофора или регулировщика | 6.2-6.5, 6.7, 6.9, 6.10 | 5 |
| 1.5. Не выполнил требования знаков приоритета, запрещающих и предписывающих знаков | Приложение 1 | 5 |
| 1.6. Пересек стоп-линию (разметка 1.12) при наличии знака 2.5 или при запрещающем сигнале светофора (регулировщика) | 6.13, Приложение 2 | 5 |
1. 7. Нарушил правила обгона 7. Нарушил правила обгона | 11.1-11.5 | 5 |
| 1.8. Нарушил правила разворота | 8.8, 8.11 | 5 |
| 1.9. Перед поворотом направо, налево или разворотом не занял соответствующее положение на проезжей части с учетом п.8.7 | 8.5 | 5 |
| 1.10. Нарушил правила движения задним ходом | 8.12 | 5 |
| 1.11 Нарушил правила проезда железнодорожных переездов | 15.1-15.4, 12.4 | 5 |
| 1.12. Не принял возможных мер к снижению скорости, вплоть до полной остановки, при возникновении опасности для движения | 10.1 | 5 |
| 1.13. Действие или бездействие кандидата в водители, вызвавшее необходимость вмешательства в процесс управления экзаменационным ТС с целые предотвращения возникновения ДТП | 5 | |
| Б. Средние | ||
| 2.1. Нарушил правила остановки | 2.1, 12.2, 12.4, 12. 7, 12.8 7, 12.8 | 3 |
| 2.2. Не подал сигнал световым указателем поворота перед началом движения, перестроением, поворотом (разворотом) | 8.1 | 3 |
| 2.3. Не выполнил требования информационно-указательных знаков, дорожной разметки (кроме разметки 1.3, 1.12 приложения 2 к ПДД) | Приложения 1, 2 | 3 |
| 2.4. Не использовал в установленных случаях аварийную сигнализацию или знак аварийной остановки | 7.1, 7.2 | 3 |
| 2.5. Выехал на перекресток при образовавшемся заторе, создав препятствие для движения ТС в поперечном направлении | 13.2 | 3 |
| В. Мелкие | ||
| 3.1. Не пристегнул ремень безопасности | 2.1.2 | 1 |
| 3.2. Несвоевременно подал и выключил сигнал поворота | 8.2 | 1 |
| 3.3. Нарушил правила расположения ТС на проезжей части | 9.3, 9.4, 9.7-9.10 | 1 |
3. 4. Выбрал скорость движения без учета дорожных и метеорологических условий 4. Выбрал скорость движения без учета дорожных и метеорологических условий | 10.1 | 1 |
| 3.5. Двигался без необходимости со слишком малой скоростью | 10.4 | 1 |
| 3.6. Резко затормозил при отсутствии необходимости предотвращения ДТП | 10.4 | 1 |
| 3.7. Нарушил правила пользования внешними световыми приборами и звуковыми сигналами | 19.1-19.5, 19.8 | 1 |
| 3.8. Невнимателен по отношению к другим ТС | 1 | |
| 3.9. Неуверенно пользуется органами управления ТС, не обеспечивает плавность движения и торможения | 1 | |
| 3.10 Не пользуется зеркалами заднего вида | 1 | |
| 3.11 Допустил блокировку колес транспортного средства при выполнении экстренного торможения | 1 | |
Центральная Автомобильная Школа г. Тула
автошкола в Туле
Контактная информация:
г. Тула, ул. Литейная, д. 12
тел: (4872)47-02-02
Тула, ул. Литейная, д. 12
тел: (4872)47-02-02
e-mail: [email protected]
Линеаризация моста Уитстона | Аналоговые устройства
Скачать PDF
Abstract
В этих рекомендациях по применению обсуждается элемент с переменным сопротивлением в мосте Уитстона — первый выбор для входных датчиков. Мы рассмотрим его поведение и объясним, как линеаризовать мостовую схему для оптимизации производительности. Простота и эффективность мостовой схемы делает ее очень полезной для контроля температуры, массы, давления, влажности, света и других аналоговых свойств в промышленных и медицинских приложениях.
Введение
Мостовые схемы Уитстона измеряют неизвестное электрическое сопротивление путем уравновешивания двух ветвей — одна с неизвестным компонентом — мостовой схемы. Эти давно зарекомендовавшие себя схемы являются одними из первых вариантов для интерфейсных датчиков. Независимо от того, являются ли мосты симметричными или асимметричными, сбалансированными или несимметричными, они позволяют точно измерить неизвестный импеданс. Поскольку мостовая схема настолько проста, но эффективна, она очень полезна для контроля температуры, массы, давления, влажности, света и других аналоговых свойств в промышленных и медицинских приложениях.
Независимо от того, являются ли мосты симметричными или асимметричными, сбалансированными или несимметричными, они позволяют точно измерить неизвестный импеданс. Поскольку мостовая схема настолько проста, но эффективна, она очень полезна для контроля температуры, массы, давления, влажности, света и других аналоговых свойств в промышленных и медицинских приложениях.
Мост Уитстона имеет один элемент с переменным импедансом, который вдали от точки баланса по своей природе нелинейный. Мостовые схемы обычно используются для определения температуры котла, камеры или процесса, расположенного в сотнях футов от фактической схемы. Обычно чувствительный элемент, как правило, резистивный датчик температуры (RTD), термистор или термопара, размещается в горячей/холодной среде для предоставления информации об изменении сопротивления в зависимости от температуры.
В этом примечании по применению мы рассмотрим его поведение и объясним, как можно линеаризовать мостовую схему для повышения производительности. Обратите внимание, что когда мы говорим в целом о «мостах», эта статья посвящена схемотехнике моста Уитстона.
Обратите внимание, что когда мы говорим в целом о «мостах», эта статья посвящена схемотехнике моста Уитстона.
Мост Уитстона с одним переменным сопротивлением
Используя недорогие, точные дискретные компоненты, мостовые схемы Уитстона с переменным сопротивлением выполняют большую часть предварительных задач в проекте. Благодаря включению элемента RTD (и в зависимости от производителя RTD) собственные колебания сопротивления моста остаются в пределах допустимых пределов линейности и допуска.
Устройства RTD обычно поставляются с очень подробными таблицами данных, характеризующими их поведение со справочными таблицами и даже уравнениями передаточной функции до четырех или более порядков членов, компенсирующих погрешность. Для высокоточной системы разработчикам традиционно приходилось учитывать как нелинейность, присущую элементу RTD, так и мосту Уитстона, а затем мучительно калибровать входную часть, линеаризируя входную часть на стороне микроконтроллера. Линейность улучшается за счет увеличения порядка уравнения в микроконтроллере. Типичная мостовая схема (рис. 1) определяет изменения сопротивления (ΔR) в миллиомах.
Типичная мостовая схема (рис. 1) определяет изменения сопротивления (ΔR) в миллиомах.
Рис. 1. Типичный мост с узлами A и B, измеряющими выходное напряжение по изменению сопротивления (ΔR).
Предполагая, что R1 = R2 = R3 = R4 = R на рисунке 1, мост сбалансирован с узлами A и B при постоянном V/2 (вольт) и с дифференциальным напряжением 0 В на V AB . Если произойдет изменение сопротивления (ΔR) по сравнению с R3, то создаваемое выходное дифференциальное напряжение составит:
Когда R1 = R2 = R3 = R4 = R, мост уравновешен.
Для одного элемента переменного сопротивления, для R3 = R + ΔR и R1 = R2 = R4 = R:
Уравнение 2 предполагает, что увеличение постоянного напряжения питания V на мосту приведет к увеличению выходного напряжения, т. е. диапазона качания по мосту. Важно отметить, что это уравнение также предполагает, что наличие двойного источника питания на четырехполюсной схеме сопротивления может быть полезно не только для увеличения диапазона, но и для поддержания синфазного напряжения 0 В на узлах AB.
Напряжение V AB обычно усиливается с помощью последующего каскада усиления через дифференциальный усилитель. Однако обратите внимание, что изменение синфазного напряжения на V AB увеличивает погрешность и сложность второго каскада усиления, обычно реализуемого как дифференциальный усилитель инструментального качества. По этой причине хорошей и простой в управлении идеей является синфазное напряжение с центром около 0 В.
На рис. 2 можно увидеть естественную тенденцию однопеременного элемента моста в виде присущей ему нелинейности его передаточной функции.
Рис. 2. V(AB) в зависимости от изменения ΔR, влияние нелинейности моста при изменении сопротивления на 800 Ом. Для сравнения здесь приведена линия тренда.
На рисунке 2 внимательно посмотрите на линию тренда. Ошибка линейности, или абсолютное отклонение кривой от идеальной прямой линии, составляет около 0,62%. Этот процент получается путем сравнения изогнутой линии тренда с линией наилучшего соответствия, т. е. прямой линией относительно кривой. Этот подход дает количественную оценку ошибки линейности в наихудшем случае для приведенной выше кривой. В некоторых случаях линейное значение 0,6%, безусловно, неприемлемо. В этом примечании по применению мы рассмотрим метод достижения точности выше 0,1%.
е. прямой линией относительно кривой. Этот подход дает количественную оценку ошибки линейности в наихудшем случае для приведенной выше кривой. В некоторых случаях линейное значение 0,6%, безусловно, неприемлемо. В этом примечании по применению мы рассмотрим метод достижения точности выше 0,1%.
Помимо устранения нелинейности, присущей мосту, вы также должны управлять нелинейностью элемента датчика температуры, RTD или даже термистора, как обсуждалось ранее. Инструментальный усилитель (рис. 3) имеет синфазное напряжение V/2 при измерении дифференциального напряжения в узлах A и B. Усилитель обычно представляет собой либо дифференциальный усилитель с четырьмя резисторами, либо встроенный инструментальный усилитель с тремя операционными усилителями. в одном пакете.
Рисунок 3. Инструментальный усилитель, подключенный к оригинальной мостовой схеме на рисунке 1.
При использовании дифференциального усилителя узлы A и B подключаются к входным резисторам, задающим коэффициент усиления усилителя, как показано на рис. 3. Выбор операционного усилителя и входных резисторов имеет большое значение, поскольку этот путь отводит ток от мост, что влияет на точность.
3. Выбор операционного усилителя и входных резисторов имеет большое значение, поскольку этот путь отводит ток от мост, что влияет на точность.
Кроме того, тип используемых резисторов влияет на характеристики моста. Например, даже резисторы с допуском 0,1%, используемые с усилителем, обеспечивают только 60 дБ подавления синфазного сигнала.
Линеаризация выхода моста без инструментального усилителя
Основываясь на нашем предыдущем обсуждении, двойное питание через резисторный мост для увеличения динамического диапазона кажется логичным подходом. Также имеет смысл расположить узлы датчиков вокруг синфазного сигнала 0 В. В такой конструкции передаточная функция от узла В будет линейной с изменением сопротивления. По сравнению с выходным сигналом схемы на Рисунке 1 диапазон выходного колебания моста будет удвоен.
На рисунке 4 мы видим реализацию схемы с двумя операционными усилителями вместо более сложного инструментального усилителя. При таком конструктивном подходе линеаризованный мостовой выход позволяет избежать ненужных путей тока, создаваемых дифференциальным усилителем. Это представляет собой более простой процесс проектирования по сравнению со схемой на рис. 3. Однако в усилителях есть положительное и отрицательное питание, что обеспечивает вдвое больший диапазон качания. Дополнительным преимуществом является улучшенная характеристика подавления синфазного сигнала, поскольку второй усилитель комфортно работает при напряжении около 0 В.
Это представляет собой более простой процесс проектирования по сравнению со схемой на рис. 3. Однако в усилителях есть положительное и отрицательное питание, что обеспечивает вдвое больший диапазон качания. Дополнительным преимуществом является улучшенная характеристика подавления синфазного сигнала, поскольку второй усилитель комфортно работает при напряжении около 0 В.
Рисунок 4. В этой схеме два операционных усилителя заменяют сложный инструментальный усилитель (рисунок 3)
На рисунке 4 узел A видит GND, так как он является суммирующим узлом усилителя 1. Таким образом, постоянный ток форсируется через ветвь R1|R3, создавая равное и противоположное напряжение на другой стороне моста с -V . Когда одно переменное сопротивление R3 изменяется (от R3 до R ± ΔR), то Ix (изменение тока из-за изменения сопротивления), протекающее через это сопротивление, создает напряжение V ± ΔV. Фактор этого ΔV проявляется через узел B балансировкой моста сопротивления (конечно, для сбалансированного моста), так как ток, нагнетаемый через ветвь резистора R2|R4, равен (V+ — (V- + ΔV)) /(R3 + R4)..jpg) Поскольку узел B находится в центре синфазного сигнала 0 В, напряжение, создаваемое на узле B, будет получено неинвертирующим усилителем. Кроме того, на этом каскаде усиления может выполняться фильтрация для оптимизации полосы пропускания и получения приемлемого уровня шума для приложения.
Поскольку узел B находится в центре синфазного сигнала 0 В, напряжение, создаваемое на узле B, будет получено неинвертирующим усилителем. Кроме того, на этом каскаде усиления может выполняться фильтрация для оптимизации полосы пропускания и получения приемлемого уровня шума для приложения.
При равновесии, когда R1 = R2 = R3 = R4 = R, напряжение в узлах A и B составляет:
При изменении одного элемента переменного сопротивления (R3) на ΔR (R3 + ΔR):
1 × x(R3 + ΔR) = (-V) + (1 × x(-ΔR))
Поскольку узел A находится на земле, напряжение в узле B равно:
Мы знаем, что термин = 0. Следовательно, напряжение в узле B равно
.А в сбалансированном мосту:
То же уравнение можно записать как:
При использовании сбалансированного моста с коэффициентом , и мы знаем, что ΔV = Ix × ΔR и , тогда уравнение принимает вид:
А если упростить R1 = R2 = R3 = R4 = R, то:
На выходе неинвертирующего операционного усилителя уравнение будет таким:
Это говорит о том, что выход второго операционного усилителя имеет инвертирующий характер.
На рис. 5 показана передаточная функция и ее нелинейность из реализации на рис. 4.
Рис. 5. Выходная мощность моста в зависимости от изменения сопротивления. Данные основаны на конструкции на рис. 4.
На рис. 5 ошибка линейности, абсолютное отклонение от идеальной прямой линии, составляет менее 0,02 %. При улучшении абсолютной нелинейности также улучшится полномасштабная ошибка (относительная ошибка).
Поскольку нет взаимодействующих резистивных ветвей, нет необходимости применять прецизионное согласование резисторов. Изменение Rx и Rg приведет только к ошибке усиления, которую можно откалибровать так же, как и устройство RTD.
Основываясь на приведенных выше данных, кажется, что этот подход может быть жизнеспособным для 12-, 14-, 16- и даже 18-битных приложений. Это простая конструкция, требующая минимальной калибровки микроконтроллера. Как отмечалось ранее, эта схема хорошо зарекомендовала себя и уже много лет широко используется в полевых условиях.
Для реализации схемы, показанной на рис. 4, необходимо двойное напряжение питания для входного каскада. Этот отрицательный источник питания также требует дополнительного места на плате и дополнительных компонентов; однако это может быть нежизнеспособным вариантом, если это единственное место во всей системе, где требуется отрицательное питание. Для высокоточного мостового датчика также требуется низкое напряжение смещения, малый дрейф смещения и низкий уровень шума.
Использование двойного операционного усилителя для конструкции моста
Рассмотрим следующий сценарий: один источник питания для усилителя, показанного на рис. 4. В качестве примера рассмотрим MAX44267 от Maxim, который работает от одного источника и может выдавать биполярные напряжения. В отличие от других усилителей с однополярным питанием, требующих запаса по уровню над землей, MAX44267 обеспечивает выходной сигнал с нулевым значением, что делает его идеальным для мостовых датчиков (рис. 6). В MAX44267 встроена схема подкачки заряда, которая вместе с внешними конденсаторами формирует шину отрицательного напряжения.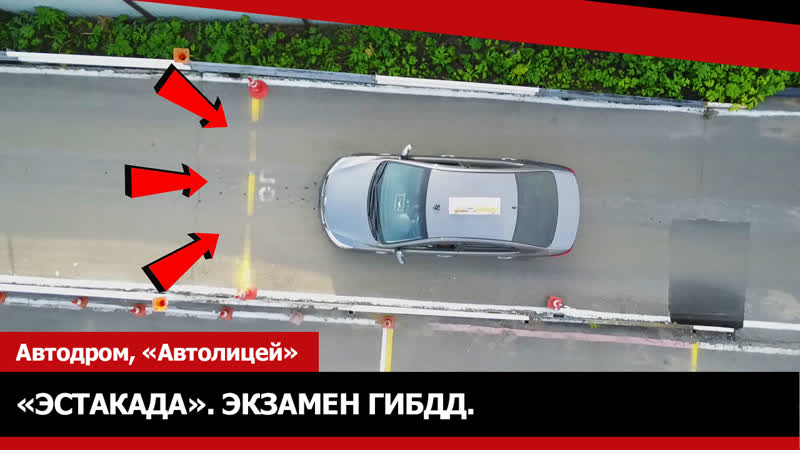 После этого усилитель может работать от одного источника питания от +4,5 В до +15 В, оставаясь таким же эффективным, как обычный двухканальный усилитель от ±4,5 В до ±15 В.
После этого усилитель может работать от одного источника питания от +4,5 В до +15 В, оставаясь таким же эффективным, как обычный двухканальный усилитель от ±4,5 В до ±15 В.
Рис. 6. Прецизионный, малошумящий сдвоенный операционный усилитель MAX44267 с низким уровнем шума и дрейфа обеспечивает нулевой выходной сигнал от одного источника питания.
В схеме, показанной на рис. 6, вы можете реализовать MAX44267 с одним напряжением питания (положительное питание, V CC ). Встроенный отрицательный генератор V SS или подкачивающий насос создает отрицательное напряжение питания. Одно из преимуществ этой архитектуры заключается в том, что она устраняет необходимость в стабилизаторах отрицательного напряжения, а также уменьшает пространство и стоимость компоновки платы.
Рисунок 7 включает опорное напряжение MAX6070_A25 для генерации опорного напряжения 2,5 В OUT . Сдвоенный операционный усилитель (опять же, MAX44267) используется с мостом сопротивлений, где R1 = R3 = 1 кОм и R2 = R4 = 10 кОм. . Чтобы уменьшить величину тока, протекающего через мост, вместе с рассеиваемой мощностью, последовательно используются дополнительные 1,8 кОм. В сбалансированном состоянии узел V(+) становится на одну треть выходным сигналом источника опорного напряжения. Затем следует усиление второй ступени с коэффициентом усиления 11 в узле OUTA.
. Чтобы уменьшить величину тока, протекающего через мост, вместе с рассеиваемой мощностью, последовательно используются дополнительные 1,8 кОм. В сбалансированном состоянии узел V(+) становится на одну треть выходным сигналом источника опорного напряжения. Затем следует усиление второй ступени с коэффициентом усиления 11 в узле OUTA.
Рис. 7. Операционный усилитель MAX44267 работает от одного источника питания.
В нашем исследовании R3 был заменен калибратором термометров сопротивления Fluke ® , который служил в качестве элемента сопротивления, зависящего от температуры (как PT1000), для оценки температурно-зависимого изменения от -50°C до +155°C. Для заданного изменения температуры с использованием PT1000 изменение сопротивления (±R) составляет около 800 Ом, а эквивалентный диапазон составляет 325 мВ (см. уравнение 4). Усилитель 2, поскольку он имеет внутренний отрицательный источник питания, может компенсировать этот размах (от -242 мВ до -83 мВ) на своем входе под землей, обеспечивая при этом выходное усиление 11,9. 0004
0004
F На втором этапе рисунка 7 фильтр Саллена-Ки фильтрует входной сигнал до требуемой полосы пропускания (в данном случае 50 Гц). Без калибровки или подстройки мы можем достичь полномасштабной точности погрешности в пределах ±0,05% от выходного сигнала моста в узле B. Такой подход делает передаточную функцию мостовой схемы линейной. Использование MAX44267 приводит к улучшению характеристик входной схемы.
Тестовые измерения
- На рис. 8 показана абсолютная зависимость выходного напряжения моста от изменения сопротивления (выходная кривая линейности) менее 0,02 %.
- На рис. 9 показан график ошибки усиления в процентах по сравнению с полной шкалой. Кривая ошибок показывает небольшие колебания порядка 0,002 %, которые являются комбинацией ручного построения графика и шума установки измерения.

- На рис. 10 показана плотность шума по напряжению моста с усилителем: 115 нВ/√ Гц на частоте 1 кГц и 500 нВ/√ Гц на частоте ниже 50 Гц. Фильтр 50 Гц, реализованный на втором этапе, устраняет чувствительность к линейному шуму.
- На рис. 11 показан шум напряжения (В PP ) моста с усилителем, от 0,1 Гц до 10 Гц, 6 мкВ PP .
Рисунок 8. Передаточная кривая показывает зависимость абсолютного выходного напряжения от температуры для схемы, показанной на рисунке 7.
Рисунок 9. % ошибки по сравнению с полной шкалой для схемы на рисунке 7.
Рисунок 10. Плотность выходного шума в зависимости от частоты для схемы на рисунке 7.
Рисунок 11. Размах шума напряжения от 0,1 Гц до 10 Гц для схемы на рисунке 7.
Рекомендации
- Справочные данные для радиоинженеров, Howard W. Sams & Co.inc (ITT).
- Практические методы проектирования для преобразования сигналов датчиков, Раздел 2: Мостовые схемы Уолтера Кестера.

- Нелинейность моста Уитстона, Техническая заметка группы измерений TN-507, 18 декабря 2000 г., http://www.thermofisher.com.au/Uploads/file/Environmental-Industrial/Process-Monitoring-Industrial-Instruments/Sound-Vibration -Стресс-Мониторинг/Стресс-Анализ/VishayMM/технология/технотес/TN-507-Wheatstone-Bridge-Nonlinearity.pdf.
Аналогичная версия этой заметки по применению появилась в Электроника 360 от 23.06.2015.
Найдите неисправности в сети CAN с помощью этих советов и методов
Обмен информацией и данными был ключевым с самого начала человечества. Чтобы принимать правильные решения, нужна хорошая информация. Обмен информацией необходим для осуществления процесса принятия решений.
Недостаток информации ограничивает принятие правильных решений. Точно так же, как вам и мне нужна информация для уверенного принятия решений, так и современному транспортному средству. Чтобы современное транспортное средство работало и двигалось правильно, информация должна передаваться быстро и точно.
Для обмена информацией у вас должны быть передатчик, носитель и приемник. Когда мы общаемся друг с другом, мы используем звук. Когда вы говорите, вы становитесь передатчиком, воздух становится посредником; и человек, с которым вы говорите, становится получателем. Поскольку вы можете и говорить, и слушать, вы трансивер.
В современном транспортном средстве обмен информацией будет происходить с помощью электричества. Когда модуль говорит (передает), он становится передатчиком, проводка становится средой; и модуль, которому отправляется сообщение, становится слушателем (получателем).
Следовательно, если модуль может передавать и принимать данные, он является приемопередатчиком, поэтому использование электрических сигналов включения-выключения позволяет передавать информацию по проводке между различными модулями автомобиля.
Эта цифровая информация о включении и выключении передается с разной скоростью по разным шинным сетям внутри автомобиля. Поскольку для каждой скорости связи в разных сетях будут использоваться разные правила, потребуются средства, обеспечивающие связь между различными сетями транспортных средств. Это будет достигнуто за счет наличия общего модуля, который соединяет каждую из этих сетей вместе.
Это будет достигнуто за счет наличия общего модуля, который соединяет каждую из этих сетей вместе.
Этот общий модуль называется шлюзом или мостом и показан на рис. 1 . Внутри шлюза находятся все приемопередатчики сетевой связи. Таким образом, шлюз будет изолировать разные сети друг от друга, одновременно обеспечивая связь между различными модулями. Для сбора данных с автомобиля используется интерфейс. Этот интерфейс или сканирующий инструмент позволит подключиться к автомобильным сетям.
После установления соединения с автомобилем данные могут передаваться и приниматься сканирующим прибором. Если есть проблемы со связью или связь отсутствует, вам необходимо подключиться к коммуникационной проводке с помощью осциллографа, чтобы проверить цепи.
Важно проверить электрическую схему, чтобы понять, как сканирующий прибор будет взаимодействовать с тестируемым автомобилем. На рисунке 2 показана блок-схема одного метода, используемого для взаимодействия с транспортным средством. В этом примере сканирующий прибор подключен к модулю шлюза (CEM).
В этом примере сканирующий прибор подключен к модулю шлюза (CEM).
Важно понимать, что в этой конфигурации сканирующий прибор может быть подключен к системе двумя различными способами:
- Интерфейс сканирующего прибора не подключен напрямую к сети автомобиля. Если группа инженеров, разрабатывающая автомобильную сеть, сочтет необходимым защитить сеть от помех, создаваемых сканирующим прибором, шлюз изолирует интерфейс сканирующего прибора от сети. Шлюз при использовании в этом методе соединяет связь сканирующего прибора с сетями автомобиля. Это означает, что данные, которые передаются от разъема диагностического канала (DLC) к сканирующему прибору, не находятся в сети автомобиля, поэтому, если вы должны были проверить эти сигналы с помощью осциллографа, эти сигналы не являются сетевыми данными автомобиля, а являются сигналами сканирования. инструментальные коммуникации. В этом случае вам потребуется подключить осциллограф непосредственно к проверяемой проводке сети автомобиля.

- Шлюз подключит интерфейс сканирующего прибора к сети автомобиля. Это позволит интерфейсу сканирующего прибора получить прямой доступ к коммуникационной сети автомобиля. Если осциллограф подключен к DLC, данные, отображаемые на осциллографе, представляют собой данные, которыми обмениваются в реальной сети автомобиля.
При диагностике сети автомобиля важно понимать, что эти два метода отличаются. Если кто-то этого не понял, вы можете подключиться к шлюзу с помощью сканирующего устройства и увидеть обмен данными на осциллографе и подумать, что система работает, тогда как на самом деле все, что отображается, — это сообщения сканирующего устройства со шлюзом. Чтобы узнать, с какой системой вы работаете, подключите осциллограф к DLC и проводке на одном из модулей.
Если на дисплее осциллографа отображаются две разные формы волны, значит, шлюз изолирует сканирующий прибор от сети. Если осциллограф отображает формы сигналов, и они накладываются друг на друга, то сканер напрямую подключен к сети. Если проводка DLC не подключена к шлюзу, а подключена непосредственно к сетевой проводке, то сканирующий прибор будет подключен непосредственно к сети.
Если проводка DLC не подключена к шлюзу, а подключена непосредственно к сетевой проводке, то сканирующий прибор будет подключен непосредственно к сети.
Если между автомобилем и диагностическим прибором есть связь и установлены коды связи, получите все коды со всех модулей. Сюда будут входить коды из высокоскоростной сети, среднескоростной сети и низкоскоростной сети. Теперь, когда у вас есть коды, просмотрите коды, чтобы увидеть, есть ли сходство между модулями одной и той же сети, и есть ли сходство между кодами из разных сетей.
Теперь вам нужно будет стать детективом и проанализировать имеющиеся данные. Например, если в высокоскоростной сети (двигатель и трансмиссия) установлены коды модуля антиблокировочной тормозной системы (ABS), в среднескоростной сети (информационный модуль водителя) установлены коды ABS, а в низкоскоростной сети (система стеклоочистителя) установлены коды ABS, то наиболее вероятным виновником является система ABS.
В этом примере для работы всех этих систем требуется скорость автомобиля. Во многих проблемах со связью в автомобиле будет установлено много разных кодов. Будет важно связать каждый полученный код и попытаться найти между ними некоторую общность.
Во многих проблемах со связью в автомобиле будет установлено много разных кодов. Будет важно связать каждый полученный код и попытаться найти между ними некоторую общность.
Низкоскоростная сеть, скорее всего, будет использовать локальную сеть межсоединений (LIN). Эта сеть является схемой master-slave. Это означает, что основной модуль управления (например, CEM), к которому подключаются другие модули, является ведущим, а все остальные модули — ведомыми.
Протокол связи LIN основан на формате данных SCI (UART), в котором используется концепция «один главный/несколько подчиненных» на однопроводной (плюс заземление) шине 12 В. Синхронизация часов для узлов не имеет точной временной базы (например, без кристалла или резонатора), но использует емкостную резистивную схему синхронизации, которая снижает стоимость каждого модуля. Поэтому коды будут храниться в мастер-модуле. Пример сигнала LIN показан на 9.0230 Рисунок 3 .
При подозрении на неисправность модуля необходимо проверить электрическую цепь. Это нужно будет сделать с помощью осциллографа. Для того, чтобы модуль мог обмениваться данными, ему потребуются только питание, заземление и провода связи. Проверка должна проводиться на предполагаемом разъеме модуля и проверять источник питания на модуле, источник заземления на модуле и коммуникационную проводку на модуле.
Это нужно будет сделать с помощью осциллографа. Для того, чтобы модуль мог обмениваться данными, ему потребуются только питание, заземление и провода связи. Проверка должна проводиться на предполагаемом разъеме модуля и проверять источник питания на модуле, источник заземления на модуле и коммуникационную проводку на модуле.
Важно знать, как должен выглядеть сигнал сети связи, над которым вы работаете. Когда вы исследуете высокоскоростную систему локальной сети контроллеров (CAN), форма волны является рецессивной (холостой) при 2,5 В и доминирующей (активной) при 3,4 В CAN-H и 2,4 В CAN-L. На рис. 4 показана форма сигнала высокоскоростной шины CAN.
CAN High Speed — это сетевая система множественного доступа с контролем несущей и разрешением конфликтов (CSMA/CR), в которой используются два противоположных напряжения для снижения уровня шума. Эти напряжения передаются по двухпроводной среде, называемой симметричной схемой передачи сигналов. Каждый провод несет сигнал напряжения, который возникает одновременно при двух разных уровнях напряжения.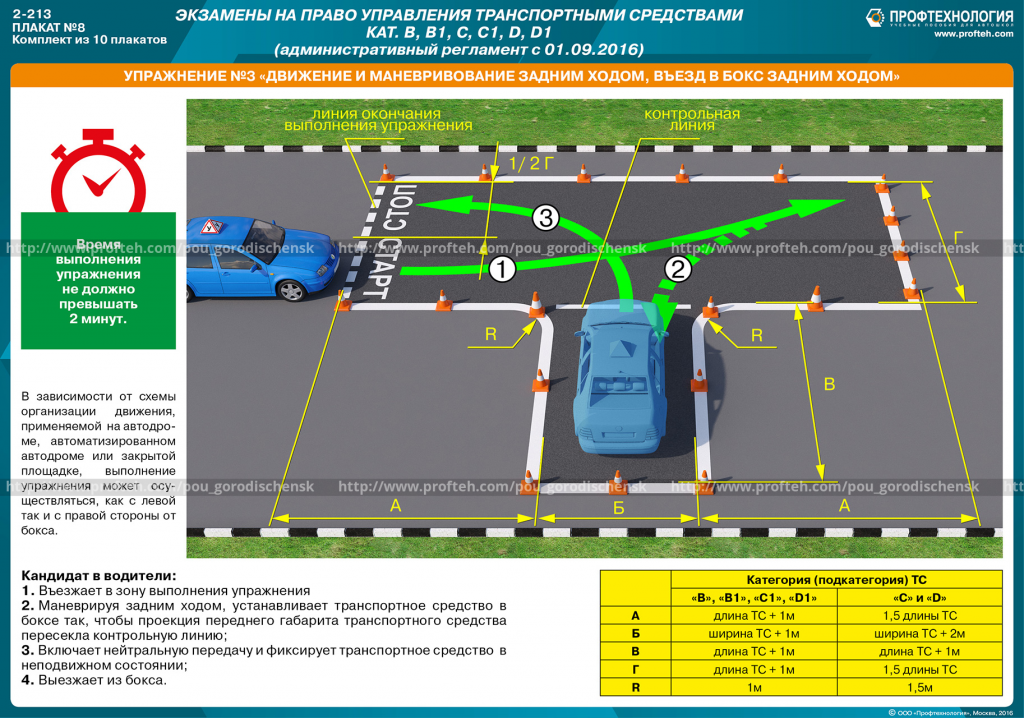
Если уровень одного напряжения повышается, а уровень другого падает, они компенсируют шумовое излучение друг друга. CAN High Speed использует витую пару проводов: линия высокого уровня CAN (CAN-H) и линия низкого уровня CAN (CAN-L). По этим проводам передаются дифференциальные сигналы.
Скрученные провода снижают радиочастоту (РЧ) как принимаемую, так и передаваемую. РЧ – это любая из частот электромагнитных волн , лежащих в диапазоне примерно от 20 кГц до 300 ГГц, что примерно соответствует частотам, используемым в радиосвязи.
Другой распространенной системой CAN, используемой в автомобилях, является CAN средней скорости с одним проводом. CAN Medium Speed использует напряжение, которое передается по однопроводной среде. Напряжение является рецессивным (холостым) при низком напряжении и доминирующим (активным) при высоком напряжении, как показано на рис. 9.0230 Рисунок 5 . Среднескоростная однопроводная система CAN представляет собой коммуникационную сеть множественного доступа с контролем несущей и разрешением коллизий (CSMA/CR).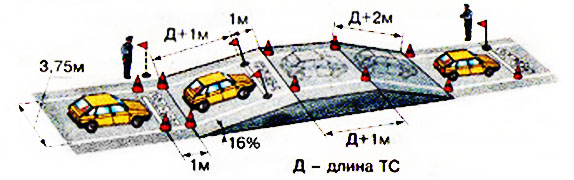
Наиболее распространенными сетевыми системами связи, используемыми в современных автомобилях, являются:
- CAN High Speed,
- CAN средней скорости
- Низкая скорость LIN
Все эти сетевые системы используют изменения напряжения с течением времени для передачи своих сообщений. Поскольку сообщения основаны на изменениях напряжения, важно использовать осциллограф для проверки выдаваемых основных характеристик напряжения. При использовании осциллографа не нужно будет проверять пакеты сообщений на побитовый формат. Побитовый формат — это продолжительность времени, в течение которого каждый бит является рецессивным или доминантным.
Эти изменения с течением времени указывают на сообщение другим модулям в сети. Эти временные интервалы для каждого бита могут быть разными для каждой системы. Кроме того, они могут меняться от производителя к производителю из-за того, что приемопередатчик CAN программируется на разное время передачи битов, поэтому каждый временной интервал, указывающий бит, может быть изменен от системы к системе, поэтому эти пакеты сообщений являются собственностью производителя и не используются совместно. рынок легковых автомобилей.
рынок легковых автомобилей.
Проследить биты внутри фрейма данных и понять, что передают пакеты сообщений, было бы невозможно, если бы у вас не было используемого кода. Одним из таких примеров может быть тестирование телеграфной системы с помощью осциллографа. Вы сможете увидеть изменения напряжения с течением времени, но не имея кода (например, Морзе), который передается, вы не поймете созданное сообщение, поэтому нет необходимости читать сообщение с побитовым разрешением. , но для проверки основных моделей напряжения производится. Модули в сети запрограммированы на понимание побитового разрешения каждого кадра данных, поэтому используйте другие модули для диагностики тестируемой сети.
Теперь, когда мы знаем, чего ожидать при анализе этих сетевых сигналов, давайте проанализируем несколько других сигналов, с которыми вы столкнетесь при работе в высокоскоростных сетях CAN. Вот основные сигналы, которые вам необходимо знать:
- Первый сигнал высокоскоростной сети Can, показанный на рис.
 системы) или когда система не полностью проснулась. Это также может быть вызвано проблемами с питанием или заземлением. В этом примере сигнал не движется в противоположном направлении от 2,5 В, как показано на рисунке 4, а вместо этого движется от 1,8 В до 3,6 В.
системы) или когда система не полностью проснулась. Это также может быть вызвано проблемами с питанием или заземлением. В этом примере сигнал не движется в противоположном направлении от 2,5 В, как показано на рисунке 4, а вместо этого движется от 1,8 В до 3,6 В. - Форма сигнала второй высокоскоростной сети CAN показана на рис. 4 и создается, когда зажигание включено или находится в «Активном режиме». Это нормальная форма сигнала высокоскоростной сети CAN. Третий сигнал высокоскоростной сети CAN показан на рисунке 9.0230 Рисунок 7 и возникает, когда зажигание выключено в положение «Спящий режим». В этом примере сигнал не движется в противоположном направлении от 2,5 В, как показано на рисунке 4, а вместо этого движется от 1,4 В до 3,6 В с минимальной передачей данных.
- Третий сигнал высокоскоростной сети CAN показан на рис. 8 и создается при отсутствии согласующих резисторов. Высокоскоростная шина CAN должна иметь оконечное сопротивление для правильной работы. Без надлежащего согласующего сопротивления биты не будут сформированы правильно, что создаст проблему с синхронизацией битов сообщения. При отсутствии или низком сопротивлении шина будет иметь отражения. Отражение или звон могут создать плохие или отсутствующие проблемы со связью. Это может быть вызвано отсутствием резисторов, обрывом проводки или отсоединением разъема модуля и разрывом линий связи с сетью.
- Четвертый сигнал высокоскоростной сети CAN показан на рис. 9 и создается, когда отсутствует внутрикадровый ответ (IFR) или подтверждение (ACK). ACK — это сообщение, встроенное в фрейм данных модулем, отличным от исходного передатчика. Это делается для того, чтобы передатчик знал, что какой-то другой модуль в сети получил сообщение. Если ACK не получен, устанавливается ошибка формы во фрейме данных.
 Это означает, что сообщение отправляется снова и снова, пока передающий модуль не прочитает ACK.
Это означает, что сообщение отправляется снова и снова, пока передающий модуль не прочитает ACK. - Форма сигнала пятой высокоскоростной сети CAN показана на рис. 10 . Это вызвано распространенной проблемой, когда выходит из строя приемопередатчик CAN. Это происходит, когда напряжение в сети становится высоким, как показано на рис. 10, или когда напряжение в сети становится низким (не показано). Это может быть периодическая проблема, когда приемопередатчик CAN впервые начинает выходить из строя, или серьезный сбой, когда каждый раз, когда модуль берет на себя управление сетью, напряжение сигнала пропадает. Неисправный модуль находится путем отключения модулей от сети при одновременном наблюдении за дисплеем осциллографа. При настройке параметров осциллографа всегда используйте режим прокрутки ленточной диаграммы со скоростью, при которой вы можете наблюдать поток сообщений шины на дисплее осциллографа.

Этот сигнал вспомогательного режима может быть одним из тех, где вы не сможете связаться с высокоскоростной шиной с помощью сканирующего прибора. В этом режиме передача данных по-прежнему содержится в каждом кадре. В некоторых случаях вы можете поддерживать связь только с одним модулем на шине, например с блоком управления коробкой передач.
Если вы отсоединяете модули во время наблюдения за дисплеем осциллографа, чтобы определить проблему связи, и линии связи входят в модуль и выходят из него, то вы должны соединить проводку CAN-H с CAN-H и CAN-L с CAN-L. у разъема. Это сохранит проводку связи с другими модулями в системе нетронутой. В линиях шины есть два согласующих резистора по 120 Ом. Они размещаются между линиями шин CAN-H и CAN-L. Резисторы могут находиться в модулях, панелях предохранителей или в проводке, поэтому проверьте их расположение на электрической схеме.
Резисторы могут находиться в модулях, панелях предохранителей или в проводке, поэтому проверьте их расположение на электрической схеме.
Для проверки сопротивления оконечных резисторов CAN в сети должно быть обесточено (спящий режим). Омируйте DLC от контакта 6 до контакта 14, и сопротивление должно быть примерно 62 Ом. Если линии связи подключаются к шлюзу (например, CEM), а шлюз изолирует DLC от высокоскоростной шины CAN, то при измерении сопротивления шины на DLC вы не измеряете реальную высокоскоростную шину CAN. линии связи. В этом случае проверьте линии связи на модуле в высокоскоростной сети.
Вот почему сообщение CAN на дисплее осциллографа повторяется снова и снова и обычно вызвано обрывом коммуникационного кабеля. В этом состоянии модуль не находится в сети, но изолирован от сети.
Если вы используете триггерный режим, он может полностью скрыть проблему. Когда правильный модуль отключен, сбой напряжения исчезнет. При повторном подключении модуля сбой напряжения вернется. Будьте осторожны, потому что, если модуль периодически выходит из строя, он может перезагрузиться после отключения питания и заземления и может начать работать правильно. Всегда сначала убедитесь, что вы видите проблему, а затем отключите модуль от сети.
Если проблема исчезла, это проблемный модуль. Всегда проверяйте все источники питания и заземления, прежде чем заменять какое-либо электронное устройство. При отсоединении электрического разъема модуля проверьте наличие загрязнений, например масла, в разъеме. Проверьте все соединительные штифты на наличие повреждений. Если вы сомневаетесь в соединении соединительных контактов, используйте Stabilant 22, жидкость, которая помогает при плохом электрическом соединении.
В высокоскоростных системах CAN модуль может быть изолирован от сети из-за ошибок, превышающих 256 ошибок. Каждый узел поддерживает два счетчика ошибок:
Каждый узел поддерживает два счетчика ошибок:
- Счетчик ошибок передачи
- Счетчик ошибок приема
Передатчик, обнаруживший ошибку, увеличивает свой счетчик ошибок передачи быстрее, чем прослушивающие узлы увеличивают свой счетчик ошибок приема. Это связано с тем, что предполагается, что вероятность того, что передатчик неисправен, выше. От нуля до 126 ошибок модуль устанавливает активные ошибки, когда он может уничтожать сообщения на шине. Это достигается с помощью шести доминирующих битов в конце кадра, что нарушает правило 5-битного заполнения и уничтожает другой трафик шины.
Когда значение счетчика ошибок передачи превышает 127 (например, после 16 попыток), модуль А переходит в состояние пассивной ошибки. Разница в том, что теперь он будет передавать пассивные флаги ошибок по шине. Пассивный флаг ошибки состоит из шести рецессивных битов (нарушает правило 5-битного заполнения) и не уничтожает другой трафик шины, поэтому другие модули не будут затронуты ошибками шины модуля А.
Однако модуль A продолжает увеличивать значение счетчика ошибок передачи. Когда количество ошибок превысит 255, модуль A отключится от шины «Bus Off State». Состояние отключения шины потребует длительного периода простоя шины (маловероятно) или сброса батареи, чтобы вернуть модуль на шину, поэтому перед заменой любого модуля сначала перезагрузите сеть и проверьте, можете ли вы связаться с этим модулем.
Если вы теперь можете общаться с этим модулем, поймите, что этот модуль может быть неисправен или может находиться в «состоянии отключения шины» не потому, что он неисправен, а из-за того, что часы другого модуля неисправны. Если у одного из модулей в сети есть ошибка синхронизации, он может не устанавливать никаких кодов для себя, но уничтожает трафик шины, тем самым устанавливая коды для других модулей. Если этот модуль с плохими часами уничтожит сообщения другого модуля, а другой модуль подсчитает достаточное количество ошибок, этот исправный модуль отключится от сети, но модуль с плохими часами (плохой модуль) останется активным на шине.