
Как правильно ездить на роботизированной коробке передач: особенности работы робота
, Статьи
Рассказываем о специфике использования робота в машине.
Роботизированная коробка передач — в простонародье просто робот — для большинства водителей мало чем отличается от традиционного автомата, рычаг которого для начала движения переводится в положения D (Drive) или R (Reverse). Но в то же время эти коробки устроены иначе. Поэтому владельцам машин с такой популярной в наши дни трансмиссией следует знать, как правильно ездить на роботе.
Как работает роботизированная коробка передач
По конструкции робот напоминает механику. Разница между ними в том, что у роботизированной коробки за управление переключением ступеней и смыкание/размыкание сцепления отвечает автоматика. То есть водителю не нужно выбирать рычагом нужную ступень и при этом каждый раз выжимать левую педаль. У машин с роботом, как и с автоматом, ее нет. То есть педалей на автомобиле с роботизированной коробкой всего две, а не три.
То есть педалей на автомобиле с роботизированной коробкой всего две, а не три.
Роботы бывают двух видов: с одним сцеплением (автоматизированные) и с двумя (преселективные). Первые проще, дешевле и конструктивно больше походят на механику, поскольку сделаны на ее основе и дополнены сервоприводами и управляющей электроникой. Они задумчивее и грубее в переключении ступеней, с ними машина дольше трогается с места, а смена передач в движении может происходить с «кивками» автомобиля. Однодисковые роботы, как правило, встречаются на недорогих моделях автомобилей из недалекого прошлого.
Преселективная коробка сложнее по конструкции. Она — как две механики в одном корпусе: одна с четными передачами, а другая с нечетными. Переключения в таком роботе происходят быстрее и без разрыва мощности, как в однодисковом, поскольку следующая передача в нужный момент уже готова включиться. Такой тип коробок передач распространен на машинах концерна Volkswagen, где он носит название DSG. Преселектив можно встретить на Porsche, «Шкодах» и Audi. А еще такие коробки используют фирмы BMW, Mercedes-Benz, Ford, Renault, Volvo, Kia, Hyundai и другие.
А еще такие коробки используют фирмы BMW, Mercedes-Benz, Ford, Renault, Volvo, Kia, Hyundai и другие.
Как переключать передачи на роботе
К роботизированным коробкам передач применимы все основные правила пользования автоматом:
-
Для начала движения при нажатом тормозе нужно включить режим D или R, а после остановки — выключить.
-
Не рекомендуется нажимать одновременно на газ и тормоз при выбранном режиме движения, чтобы избежать перегрузки трансмиссии и снижения ее ресурса.
-
Переключения между режимами D, R и P следует производить после полной остановки машины при нажатом тормозе, то есть когда сцепления полностью разомкнуты.
-
Избегайте резких стартов в режиме «газ в пол» и прочих «светофорных гонок», а также дрифта и езды с заносами, чтобы раньше времени не убить коробку.
-
Не стоит покорять бездорожье на машине без понижающей передачи.
 От пробуксовок на оффроуде у робота сильно изнашивается сцепление, а сам он перегревается.
От пробуксовок на оффроуде у робота сильно изнашивается сцепление, а сам он перегревается. -
Не переключайте робот в N для движения накатом, чтобы не подвергать сцепление ударным нагрузкам при последующем включении режима D.
-
По возможности избегайте буксировки прицепов или других автомобилей, чтобы не подвергать элементы робота повышенному износу. А если это все же необходимо, то двигайтесь плавно, без резких разгонов и торможений.
Как управлять роботизированной коробкой передач
Поскольку роботы конструктивно отличаются не только от привычного классического автомата, но и друг от друга, в их эксплуатации есть разного рода нюансы, о которых следует знать владельцам машин с такими коробками. Например, чтобы в автоматическом режиме однодисковый робот успевал переключать ступени и не пинался, а преселективный не путался в передачах, лучше ездить спокойно, плавно и не торопясь. Для агрессивной езды по этой же причине предпочтительнее ручной режим коробки, в котором можно щелкать ступени самостоятельно.
У машин с однодисковым сцеплением, как правило, не предусмотрен режим автоматического включения стояночного тормоза при остановке либо он действует всего несколько секунд, чтобы водитель успел потянуть за рычаг между передними сиденьями. Поэтому стоять на светофоре и трогаться с места в горку с такой коробкой нужно как на механике — предварительно нажав тормоз или удерживая автомобиль на месте с помощью «ручника». Роботы изначально настроены на экономичный стиль езды, поэтому после первой они спешат скорее подоткнуть вторую передачу.
При толкании в заторах на небольшой скорости роботизированные трансмиссии то и дело переключаются между первой и второй ступенью, тем самым увеличивая нагрузку на свои элементы и больше нагреваясь. Да и сцеплению при этом приходится работать с пробуксовками. Чтобы наносить меньше вреда роботу и минимизировать дискомфорт для водителя и пассажиров от пинков коробки, в пробках лучше ездить в ручном режиме, выбрав и зафиксировав оптимальную для дорожной ситуации первую или вторую передачу.
Иван Титов
Читайте также
- Автомобили с пробегом продолжают дорожать, но рост цен замедлился
- Какими смартфонами пользуются автомобилисты в России
- Полный список автомобильных новинок месяца: их уже можно купить
- Топ товаров с «АлиЭкспресс» к предстоящему отпуску
- ГИБДД рассказала о новом дорожном знаке
Продолжение темы
Все новости29 июня 2022Как бороться с запахами в салоне машины: лайфхак от таксистов
6 июня 2022Как распознать, что на машине ездил лихач?
17 мая 2022Как увеличить клиренс автомобиля: 5 простых способов
2 мая 2022Что делать, если машина сломалась в дороге?
30 апреля 2022Куда поехать на шашлыки, чтобы не нарваться на штраф
Как ездить на роботизированной коробке передач
В прогрессивных моделях транспортных средств устанавливаются различные формы коробок передач. Наибольшее распространение получили следующие варианты: механический, автоматический, вариаторный.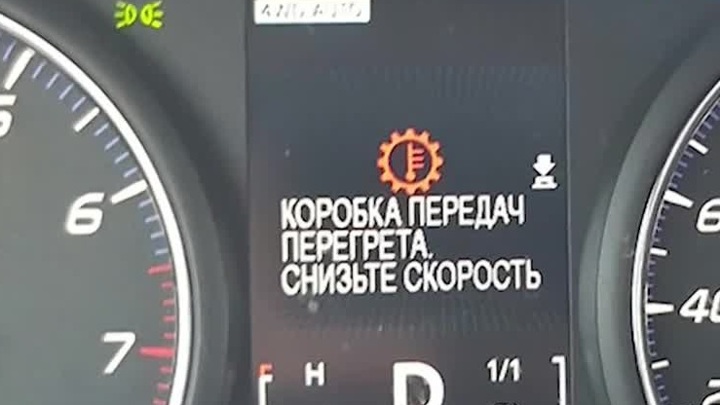 МКПП характеризуется высокой степенью надежности, с другой стороны, он требует от человека хороших навыков управления машиной. Второй вариант существенно проще в эксплуатации, но немного «капризен» в техническом плане. Как можно увидеть, характеристика обоих видов включает уникальные особенности: плюсы и минусы. Именно по этой причине конструкторы создали еще одну коробку передач, имеющую существенные отличия от других разновидностей. Коробка робот все чаще используется при оснащении автомобилей.
МКПП характеризуется высокой степенью надежности, с другой стороны, он требует от человека хороших навыков управления машиной. Второй вариант существенно проще в эксплуатации, но немного «капризен» в техническом плане. Как можно увидеть, характеристика обоих видов включает уникальные особенности: плюсы и минусы. Именно по этой причине конструкторы создали еще одну коробку передач, имеющую существенные отличия от других разновидностей. Коробка робот все чаще используется при оснащении автомобилей.
Роботизированная коробка передач: особенности и преимущества езды
Внешний вид РКПП
Данная разновидность не так уж сложна, если говорить об ее устройстве. В состав входит механическая коробка и электронный блок, предназначенный для управления. У готового изделия имеются в наличии полный спектр функций, раньше исполнявшихся автомобилистом с механикой. Сюда относятся, в частности: переведение рычага в определенное положение, выжимание сцепления и так далее. Отчасти расширенная функциональность объясняется наличием актуаторов, то есть, сервоприводов, которые находятся внутри блока.
Строение роботизированной коробки
К основным преимуществам новой разработки можно отнести надежность и удобство эксплуатации. Человеку, управляющему автомобилем с роботом, достаточно переводить селектор в то положение, которое нужно, и получать удовольствие от вождения. Электронный блок берет на себя заботы насчет того, чтобы переключение передач осуществлялось верно. Хотелось бы отметить, что большая часть роботизированных коробок оборудуются в качестве дополнения ручным управлением, что дает водителю возможность ездить на коробке, и управлять машиной самостоятельно. Есть лишь одно отличие, которое заключается в отсутствии выжимать сцепление.
Схема работы РКПП
Как ездить на роботизированной коробке передач?
Часть форматов функционирования робота имеют отличия, если проводить сравнение с автоматической моделью. В список уникальных режимов работы относятся:
- «N» — нейтральный вариант, во время которого мотор продолжает функционировать, на оборудование передается вращение, однако на колеса оно не поступает, что объясняется расположением шестерен.
 Режим актуальнее использовать при продолжительной стоянки, а также перед стартом и после того, как авто остановилось.
Режим актуальнее использовать при продолжительной стоянки, а также перед стартом и после того, как авто остановилось. - «R» — перемещение назад. Для того, чтобы войти в данный режим автолюбитель должен переместить селектор в заданное положение, за счет чего машина начинает перемещаться назад.
- «А/М» (иногда называется «Е/М») — перемещение вперед. Данный режим – это то же самое, что и режим «D», который есть во всех коробках автоматического типа. При его использовании машина перемещается вперед, а коробка передач сама выполняет переключение. При активизации режима «М» управление осуществляется вручную. За счет перевода селектора в определенное положение пользователь выбирает тот режим, что ему нужен в данный момент времени.
- «+», «-» — предназначен для переключения передач. Непродолжительные переводы селектора сторону плюса или минуса способно обеспечить переключение передачи при выборе режима управления вручную.
- Потребность в подогреве
С первых же дней использования транспортного средства с РКПП можно понять, что в водительской работе нет ничего сложного.
Вы поймете, как пользоваться новинкой, ведь для грамотного управления нужно всего лишь переводить селектор в выбранное положение и перемещаться по трассе. Но для того, чтобы устройство функционировало без каких-либо проблем и сбоев, нужно знать, как его эксплуатировать.
Нужно ли прогревать машину зимой?
Как управлять роботизированной коробкой передач? Для начала нужно определиться с тем, есть ли необходимость в прогревании коробки перед началом использования в зимнее время. Если вы используете автоматическое приспособление, то знаете о том, что в холода нельзя обойтись без предварительного прогрева, который выполняется путем непродолжительного перевода селектора во все существующие положения.
Езда на автомобиле с роботизированной коробкой передач не требует проведения дополнительных манипуляций, даже если за окном минусовая температура. Однако, зимой коробку передач все же следует подготовить к предстоящей эксплуатации. Дело в том, что в то время, когда машина стоит, масло, находящееся внутри устройства, стекает вниз и из-за пониженных температур, его консистенция изменяется: вещество становится намного гуще.
Однако, зимой коробку передач все же следует подготовить к предстоящей эксплуатации. Дело в том, что в то время, когда машина стоит, масло, находящееся внутри устройства, стекает вниз и из-за пониженных температур, его консистенция изменяется: вещество становится намного гуще.
По этой причине в холодное время года рекомендуется запустить мотор и выждать некоторое время для того, чтобы масло разогрелось и распределилось по всем элементам, входящим в состав коробки. Это позволит сократить трение и уменьшить износ деталей, соприкасающихся между собой. Чтобы процесс прошел успешно, требуется выстоять две минуты, заведя двигатель.
Затем можно плавно, стараясь не делать резких рывков, переместиться на километр, что поспособствует оптимальному прогреву масляной жидкости.
При этом совершенно не обязательно переводить селектор в различные положения, достаточно оставить его в нейтральном режиме.
Особенности вождения с роботизированной коробкой
Большая часть машин, оборудованных самыми прогрессивными моделями коробок передач, не оснащены системой помощи старта для подъема, а потому эксперты рекомендуют начинать движение самостоятельно. В подобной ситуации действовать нужно, как и в случае в механизированной коробкой, то есть, селектор следует перевести в режим «А», а после нажать на акселератор, параллельно сняв машину с ручника. Это исключит вероятность того, что транспортное средство начнет откатываться назад. Стоит заблаговременно потренироваться в выполнении указанных действий, чтобы научиться управлению, почувствовать двигатель и без промедления распознавать момент, когда сцепление уже включилось и нужно снять машину с ручника.
В подобной ситуации действовать нужно, как и в случае в механизированной коробкой, то есть, селектор следует перевести в режим «А», а после нажать на акселератор, параллельно сняв машину с ручника. Это исключит вероятность того, что транспортное средство начнет откатываться назад. Стоит заблаговременно потренироваться в выполнении указанных действий, чтобы научиться управлению, почувствовать двигатель и без промедления распознавать момент, когда сцепление уже включилось и нужно снять машину с ручника.
Вы пользовались авто в зимнее время? В таком случае вы знаете о том, что для того, чтобы воспользоваться ручным режимом, установив первую передачу, не рекомендуется усиленно газовать, в противном случае есть некоторый риск того, что колеса начнут буксовать.
Во время движения на подъем при определенном режиме, выбранном автоматически, устройство без помощи человека переходит в более низкие передачи, что объясняется с логической точки зрения: при слишком высоких оборотах намного проще преодолеть подъем. РКПП оборудована гироскопом, определяющим расположение машины в пространстве. Если индикатор показывает подъем, устройство начинает работать адекватно ситуации. Допускается выполнять перемещение в ручном режиме, для этого нужно зафиксировать выбранную передачу. Нельзя забывать о том, что коробка передач не позволяет перемещаться в натяг, а потому при подъеме оборачиваемость двигателя изменяется и составляет не менее 2500 оборотов за минуту.
Во время спуска от человека, управляющего машиной, не требуется ничего. Ему нужно всего лишь перевести селекторный рычаг в положение «А», убрать стоячий тормоз. В такой ситуации машина будет тормозить за счет мотора.
Как выполнить остановку?
Для водителей также важен вопрос, который касается остановки и парковки. Очень важно знать, как правильно ездить, чтобы автомобиль исправно служил на протяжении долгого времени.
Какие режимы еще существуют?
Выше перечислены основные правила, которые следует соблюдать, управляя машиной с роботизированной коробкой. Однако, есть и иные особенности, о которых следует знать. Например, некоторые изделия предполагают вспомогательные режимы, а не только те, что были перечислены выше. Это такие виды передач как: спортивный и зимний (его еще называют «снежинкой»).
Правильная эксплуатация роботизированной АКПП | сервис DRIVE-SERVICE
Многие рядовые автолюбители считают, что роботизированная АКПП не слишком отличается от обычной гидромеханической коробки передач, однако это не совсем так.
Помимо традиционной гидромеханической коробки автомат сегодня широко применяются и устройства другого типа. Одна из разновидностей – роботизированная коробка автомат (или просто «робот»), которая существенно дешевле в производстве по сравнению с другими типами АКПП. К тому же, современные устройства такого типа обеспечивают высокую степень экономии топлива, что немаловажно при нынешних расценках на энергоносители.
Многие рядовые автолюбители считают, что роботизированная АКПП не слишком отличается от обычной гидромеханической коробки передач, однако это не совсем так. Данный тип устройств имеет существенные отличия в конструкции, которые во многом обуславливают специфику их использования.
Ниже мы рассмотрим основные правила, следование которым поможет вам сделать езду на автомобиле более комфортной, а коробке-роботу обеспечит продолжительный срок исправной службы.
Специфика пользования роботизированной коробкой передач
Если упрощённо рассматривать устройство коробки автомат такого типа, можно сказать, что она имеет много общего с механической коробкой передач, за исключением того, что скорости тут могут переключаться без участия водителя. Помимо полностью автоматического режима работы такое устройство предусматривает и полуавтоматический режим, при использовании которого водитель может самостоятельно повышать или понижать передачу.
Многие производители стремятся облегчить жизнь автолюбителям, пересевшим на авто, оснащённое такой системой сцепления, с транспортного средства с традиционной гидравликой. Для этого во многих моделях роботов предусмотрены похожие режимы работы:
- Нейтральный или N – при котором отсутствует передача крутящего момента.

- Режим реверса или R – для движения задним ходом.
- Режим движения вперёд или D (драйв) – такой режим предусмотрен для устройств с двойным сцеплением. У роботов с одиночным сцеплением его аналогом является режим А/М или Е/М.
- Специальный режим M – при котором коробка автомат управляется вручную.
Советы по вождению автомобиля с роботизированной АКПП
Данный вид коробки автомат обладает определёнными особенностями, которые особенно заметны людям, ранее управлявшим автомобилем с обычной АКПП.
Прежде всего такие автолюбители отмечают то, что устройство может немного задерживать повышение или понижение передачи. Автоматический режим его работы более подходит для спокойной размеренной езды. Поэтому если вам нужно резко разогнаться, лучше будет переключиться в ручной режим. И даже в этом режиме следует плавно нажимать на газ, в противном случае возможны провалы мощности или рывки.
Кроме того, многие владельцы таких авто отмечают, что при переключении передачи могут возникать лёгкие толчки – это происходит в момент, когда сцепление «смыкается». Ничего страшного в таких толчках нет, но если вы захотите их избежать, можно немного сбрасывать газ перед таким переключением.
Также отметим, что наличие ручного режима вовсе не означает, что на авто с такой АКПП можно активно буксовать или дрифтовать. Электроника устройства не рассчитана на такие режимы работы и не сможет обеспечить правильное функционирование коробки автомат. В результате велик риск повреждения частей АКПП или их ускоренный износ. Также, окончательно «запутавшись», электроника может просто перевести коробку передач на работу в аварийном режиме.
Следование этим простым рекомендациям поможет владельцу избежать преждевременных неполадок в работе системы сцепления или предотвратить ранний выход роботизированной коробки автомат из строя. Также, разумеется, не стоит забывать о своевременном техобслуживании и грамотном устранении сбоев в работе устройства.
- Советы
- Правильная эксплуатация роботизированной АКПП
Помимо традиционной гидромеханической коробки автомат сегодня широко применяются и устройства другого типа. Одна из разновидностей – роботизированная коробка автомат (или просто «робот»), которая существенно дешевле в производстве по сравнению с другими типами АКПП. К тому же, современные устройства такого типа обеспечивают высокую степень экономии топлива, что немаловажно при нынешних расценках на энергоносители.
Многие рядовые автолюбители считают, что роботизированная АКПП не слишком отличается от обычной гидромеханической коробки передач, однако это не совсем так. Данный тип устройств имеет существенные отличия в конструкции, которые во многом обуславливают специфику их использования.
Ниже мы рассмотрим основные правила, следование которым поможет вам сделать езду на автомобиле более комфортной, а коробке-роботу обеспечит продолжительный срок исправной службы.
Специфика пользования роботизированной коробкой передач
Если упрощённо рассматривать устройство коробки автомат такого типа, можно сказать, что она имеет много общего с механической коробкой передач, за исключением того, что скорости тут могут переключаться без участия водителя. Помимо полностью автоматического режима работы такое устройство предусматривает и полуавтоматический режим, при использовании которого водитель может самостоятельно повышать или понижать передачу.
Многие производители стремятся облегчить жизнь автолюбителям, пересевшим на авто, оснащённое такой системой сцепления, с транспортного средства с традиционной гидравликой. Для этого во многих моделях роботов предусмотрены похожие режимы работы:
- Нейтральный или N – при котором отсутствует передача крутящего момента.
- Режим реверса или R – для движения задним ходом.
- Режим движения вперёд или D (драйв) – такой режим предусмотрен для устройств с двойным сцеплением.
 У роботов с одиночным сцеплением его аналогом является режим А/М или Е/М.
У роботов с одиночным сцеплением его аналогом является режим А/М или Е/М. - Специальный режим M – при котором коробка автомат управляется вручную.
Советы по вождению автомобиля с роботизированной АКПП
Данный вид коробки автомат обладает определёнными особенностями, которые особенно заметны людям, ранее управлявшим автомобилем с обычной АКПП.
Прежде всего такие автолюбители отмечают то, что устройство может немного задерживать повышение или понижение передачи. Автоматический режим его работы более подходит для спокойной размеренной езды. Поэтому если вам нужно резко разогнаться, лучше будет переключиться в ручной режим. И даже в этом режиме следует плавно нажимать на газ, в противном случае возможны провалы мощности или рывки.
Кроме того, многие владельцы таких авто отмечают, что при переключении передачи могут возникать лёгкие толчки – это происходит в момент, когда сцепление «смыкается». Ничего страшного в таких толчках нет, но если вы захотите их избежать, можно немного сбрасывать газ перед таким переключением.
Также отметим, что наличие ручного режима вовсе не означает, что на авто с такой АКПП можно активно буксовать или дрифтовать. Электроника устройства не рассчитана на такие режимы работы и не сможет обеспечить правильное функционирование коробки автомат. В результате велик риск повреждения частей АКПП или их ускоренный износ. Также, окончательно «запутавшись», электроника может просто перевести коробку передач на работу в аварийном режиме.
Следование этим простым рекомендациям поможет владельцу избежать преждевременных неполадок в работе системы сцепления или предотвратить ранний выход роботизированной коробки автомат из строя. Также, разумеется, не стоит забывать о своевременном техобслуживании и грамотном устранении сбоев в работе устройства.
Нужна консультация?
Показать все марки
Запишитесь на ремонт прямо сейчас!
Как пользоваться коробкой роботом: правила вождения и эксплуатации
На легковых автомобилях используют несколько видов ступенчатых трансмиссий, предусматривающих переключение передач в ручном или автоматическом режиме. На части автомашин встречается роботизированная коробка, созданная на базе механической, но с автоматическим переключением скоростей и управлением сцеплением. Водителю необходимо знать, как ездить на роботе, поскольку от правильной эксплуатации зависит ресурс сцепления и механической части коробки скоростей.
На части автомашин встречается роботизированная коробка, созданная на базе механической, но с автоматическим переключением скоростей и управлением сцеплением. Водителю необходимо знать, как ездить на роботе, поскольку от правильной эксплуатации зависит ресурс сцепления и механической части коробки скоростей.
Содержание
- Устройство роботизированной КПП
- Как ездить на коробке робот
- Особенности вождения с роботизированной коробкой
- Требуется ли прогрев
- Начало движения на подъем его преодоление спуск
- Остановка и парковка
- Другие режимы
- Эксплуатация роботизированной коробки передач в городских условиях
Устройство роботизированной КПП
Роботизированная коробка представляет собой механическую ступенчатую трансмиссию, дополненную электронным блоком управления. Управление муфтой сцепления и переключение скоростей производится исполнительными сервоприводами (электрическими или гидравлическими). Для начала движения водителю необходимо поставить селектор в положение A (перемещение вперед) или R (движение назад), а затем отпустить педаль тормоза.
Для начала движения водителю необходимо поставить селектор в положение A (перемещение вперед) или R (движение назад), а затем отпустить педаль тормоза.
Блок управления переключает скорости в зависимости от частоты вращения коленчатого вала и сопротивления движению. В конструкции контроллера предусмотрен специальный датчик, фиксирующий угол наклона автомашины. В зависимости от положения автомобиля корректируется работа роботизированной коробки.
В конструкции коробки предусмотрен режим ручного переключения, обозначаемый литерой M. Для выбора скорости необходимо нажимать на селектор вперед или назад, повышая или понижая передачу. Электронный контроллер отслеживает режим работы двигателя и скорость движения, в памяти устройства зашиты допустимые соотношения скоростей и оборотов силового агрегата. Например, блок не допустит попытки тронуться с 3-й передачи или перекрутить коленчатый вал мотора ошибочным включением пониженного передаточного отношения при движении на трассе.
Обслуживание роботизированной коробки заключается в проведении компьютерной диагностики, позволяющей определить остаточную толщину фрикционных накладок сцепления. При неаккуратном обращении с трансмиссией происходит ускоренный износ накладок муфты сцепления. Изменение размерных цепей негативно влияет на работу исполнительных механизмов, проходящих калибровку в заводских условиях.
При проведении ежегодного обслуживания автомашины или через каждые 10-15 тыс. км выполняется адаптация конструкции, позволяющая компенсировать износ накладок. Пренебрежение процедурой адаптации приводит к некорректной работе агрегата и его переходу в аварийный режим. В механической части трансмиссии производится замена масла на жидкость, рекомендованную изготовителем. Периодичность обслуживания агрегата зависит от производителя, рекомендации приведены в сервисной книжке автомобиля.
Роботизированная коробка передач выбирать и включать необходимую передачу без участия водителя.Как ездить на коробке робот
Роботизированная коробка предназначена для спокойного движения, резко нажимать на педаль газа не следует даже при активации спортивного режима.

Для обеспечения динамичного разгона рекомендуют перевести селектор в режим ручного управления и плавно ускоряться на каждой передаче. При замедлении необходимо вернуть рычаг в положение автоматического выбора передачи. Допускается буксировать автомобиль с роботом в случае поломки силовой установки или узлов подачи топлива. При поломке трансмиссии рекомендуют перемещать автомашину на эвакуаторе.
При переключении скоростей на роботе происходит толчок, что не является проблемой или признаком неисправности. Для уменьшения эффекта можно отслеживать моменты переключения и снижать обороты двигателя. Если машина застряла в грязи или снежной каше, допускается раскачивание автомобиля путем переключения коробки из режима А в режим R. Но длительное буксование приводит к нарушению работы исполнительных механизмов. Для восстановления работоспособности требуется выполнить компьютерную калибровку сервоприводов.
Особенности вождения с роботизированной коробкой
Поскольку робот является компромиссным вариантом конструкции, следует учитывать некоторые особенности управления автомобилем. Например, роботизированный агрегат не всегда корректно переключает скорости, что приводит к падению интенсивности разгона. При резком нажатии на педаль газа передачи переключаются вниз с запаздыванием. Эту особенность следует учитывать при совершении обгона на трассе, особенно с выездом на полосу встречного движения.
Например, роботизированный агрегат не всегда корректно переключает скорости, что приводит к падению интенсивности разгона. При резком нажатии на педаль газа передачи переключаются вниз с запаздыванием. Эту особенность следует учитывать при совершении обгона на трассе, особенно с выездом на полосу встречного движения.
Требуется ли прогрев
Роботизированная коробка не требует прогрева масла. После запуска двигателя рекомендуют постоять 20-60 секунд, пока шестерни не разбросают смазывающее вещество по поверхностям трения. Прогревать машину зимой необходимо на протяжении нескольких минут, до момента стабилизации оборотов двигателя. Затем можно пользоваться автомобилем. Селектор переводится в позицию А.
Селектор переводится в позицию А.
При прогреве двигателя не требуется устанавливать селектор коробки в различные положения по аналогии с гидромеханическими агрегатами. После начала движения рекомендуют проехать 1-2 км на пониженной скорости, чтобы снизить нагрузки на трущиеся поверхности. Поскольку картер коробки находится на удалении от силового агрегата, нагрев масла в трансмиссии происходит через 10-15 км пути.
Начало движения на подъем его преодоление спуск
В конструкции роботизированных агрегатов не используется ассистент старта в гору. Исключение составляют некоторые марки автомобилей.
Чтобы начать двигаться в гору на автомашине с коробкой робот, необходимо перевести рычаг в положение A, одновременно удерживая автомобиль стояночной тормозной системой. Затем водитель отпускает рычаг тормоза и увеличивает частоту вращения двигателя.
Для снижения отката автомашины водителю необходимо поймать момент включения сцепления и одновременно отпустить рычаг ручного тормоза.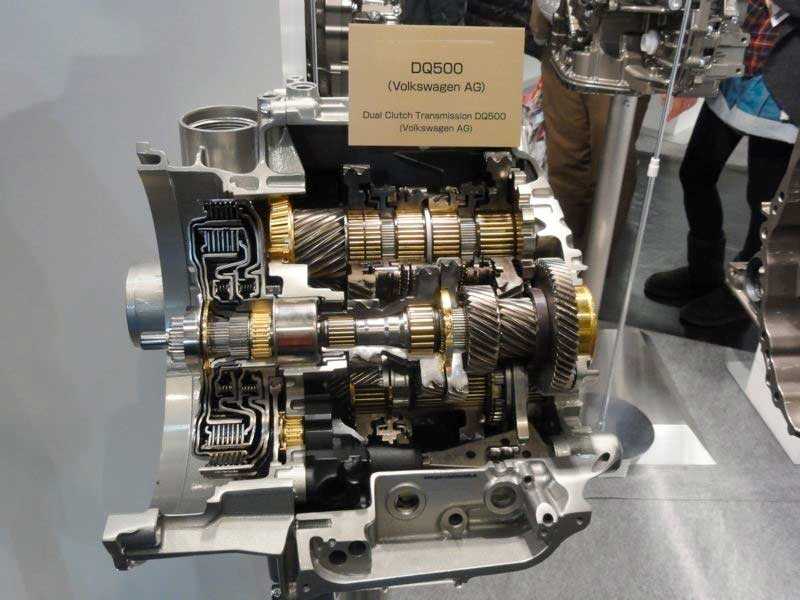 Перед началом эксплуатации автомобиля рекомендуют выполнить несколько пробных попыток старта на горке, чтобы понять момент начала работы сцепления. В зимнее время коробка переключается в режим ручного выбора ступени, что снижает пробуксовку в начале движения. После разгона скорости переключаются принудительно или селектор переводится в положение автоматической работы.
Перед началом эксплуатации автомобиля рекомендуют выполнить несколько пробных попыток старта на горке, чтобы понять момент начала работы сцепления. В зимнее время коробка переключается в режим ручного выбора ступени, что снижает пробуксовку в начале движения. После разгона скорости переключаются принудительно или селектор переводится в положение автоматической работы.
При увеличении скорости коробка будет повышать передачи, но если частота вращения мотора упадет, трансмиссия перейдет на пониженную скорость в автоматическом режиме. При движении на спусках рычаг остается в положении А, педаль газа отпускается для торможения двигателем.
Для дополнительного снижения скорости производится нажатие на педаль тормоза.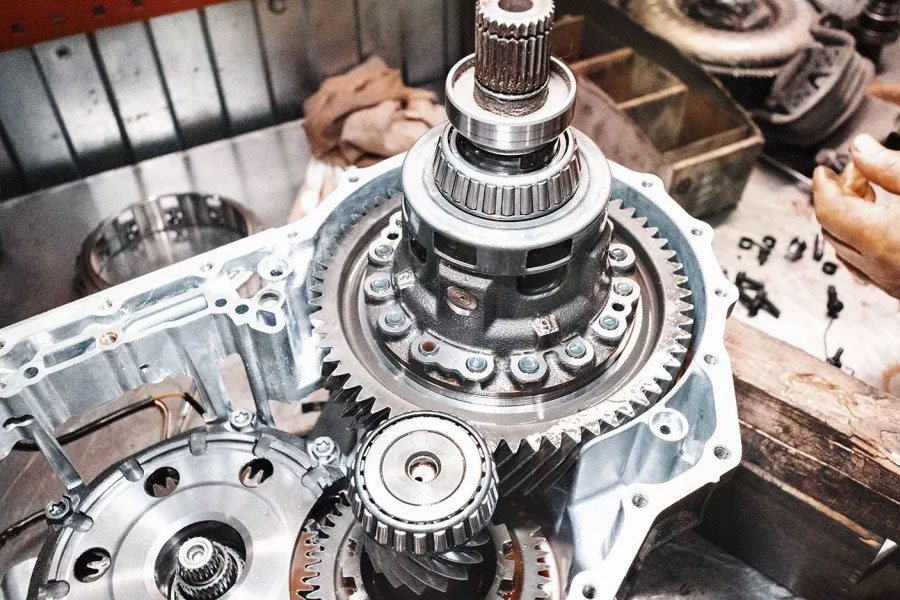 Переключать селектор трансмиссии в нейтральное положение не требуется.
Переключать селектор трансмиссии в нейтральное положение не требуется.
Остановка и парковка
Автомобиль с роботизированным агрегатом останавливается при помощи штатных тормозов. Затем водитель устанавливает рычаг коробки в нейтральное положение и включает стояночный тормоз. Педаль тормоза отпускается, водитель может заглушить двигатель и вынуть ключ из замка. При остановках, например, на светофоре, допускается оставлять селектор в положении движения вперед. При длительной стоянке необходимо перевести рычаг в нейтральную позицию, поскольку в выжатом положении сцепление изнашивается.
Другие режимы
Роботизированные коробки передач поддерживают дополнительные режимы работы:
- Режим, обозначаемый пиктограммой в виде снежинки, предназначен для передвижения в зимнее время. Контроллер коробки обеспечивает старт со второй передачи и меняет алгоритм переключения скоростей, снижая пробуксовку колес на скользком дорожном покрытии.
- Функция «спорт» позволяет переключать передачи при повышенной частоте вращения коленчатого вала, что обеспечивает динамичный разгон.

- Ручной режим, позволяющий принудительно управлять коробкой передач.
Эксплуатация роботизированной коробки передач в городских условиях
Езда на автомобиле с роботизированной коробкой в городе требует переключения в нейтральное положение при остановках дольше 20-30 секунд.
Если удерживать автомашину на тормозе, то сцепление находится в разомкнутом состоянии. Из-за этого изнашиваются детали привода фрикционной муфты, теряется эластичность пружинных элементов. Дополнительных требований к эксплуатации роботизированного узла нет.
Как переключать коробку робот
На современных автомобилях используется несколько видов коробок передач – механическая, автоматическая, вариаторная. Механическая коробка отличается своей надежностью, но требует от водителя навыков управления. Автоматическая же значительно проще в управлении, но более «капризна» в техническом плане. Недавно же конструкторы выпустили еще один тип КПП – роботизированная. В ней они постарались соединить воедино надежность «механики» с удобством «автомата». И это у них получилось – все больше автопроизводителей комплектуют свои авто роботизированной коробкой передач. Немного об устройстве : Суть такой коробки достаточно проста – имеется механическая КПП и электронный блок ее управления. У РКПП все функции, которые должен был выполнять водитель с механической коробкой (выжим сцепления, перевод рычага коробки в нужное положение) выполняется актуаторами – сервоприводами электронного блока.
В ней они постарались соединить воедино надежность «механики» с удобством «автомата». И это у них получилось – все больше автопроизводителей комплектуют свои авто роботизированной коробкой передач. Немного об устройстве : Суть такой коробки достаточно проста – имеется механическая КПП и электронный блок ее управления. У РКПП все функции, которые должен был выполнять водитель с механической коробкой (выжим сцепления, перевод рычага коробки в нужное положение) выполняется актуаторами – сервоприводами электронного блока.
Благодаря этому надежность КПП возросла за счет использования классической «механики» и возросло удобство ее пользования. Водителю всего лишь необходимо переводить селектор в нужное положение (как в автоматической КПП) и наслаждаться ездой, а электронный блок позаботится о том, чтобы выполнялось переключение передач. При всем этом многие роботизированные коробки оснащаются еще и ручным управлением, что позволяет управлять водителю коробкой самостоятельно, с единственным отличием – нет необходимости выжимать сцепление. Особенности управления: Некоторые режимы работы РКПП получила от автоматической коробки, а именно:
Особенности управления: Некоторые режимы работы РКПП получила от автоматической коробки, а именно:
«N» — нейтраль. Режим, при котором крутящий момент на колеса от КПП не передается. То есть двигатель работает, на коробку передается вращение, но из-за положения шестерен на колеса оно не передается. Используется при длительной стоянке авто, перед началом движения, после остановки;
«R» — движение задним ходом. Здесь все просто, водитель переводит селектор в это положение и авто движется назад. Другие же режимы роботизированной коробки имеют свое обозначение:
«А/М» или «Е/М» — движение вперед. Этот режим соответствует режиму «D» автоматической коробки, то есть автомобиль движется вперед, а КПП производит переключение передач. В режиме «М» выполняется ручное управление. Переводом селектора в определенный паз выбирается необходимый режим;
«+», «-» — переключатель передач. Кратковременные переводы селектора в сторону «+» или «-» обеспечивают переключение передачи при ручном режиме управления «М».
Требуется ли прогрев коробки?
Вроде все просто, и ничего сложного в управлении такой коробки нет – достаточно перевести селектор в нужное положение, и начать движение. И все же следует знать, как управлять коробкой робот, чтобы она работала без проблем.
Начнем с интересного вопроса – нужно ли прогревать КПП перед началом движения зимой? Для автоматической коробки в зимний период прогрев обязателен и выполняется он кратковременным переводом селектора во все положения.
Роботизированная коробка, по сути, механическая и не требует прогрева. И все же зимой перед началом движения прогреть РКПП следует, хотя это не совсем прогрев. Во время стоянки масло в коробке стекает вниз и из-за мороза загустевает. Поэтому рекомендуется зимой после запуска мотора дать время, чтобы масло скорее не прогрелось, а просто растеклось по элементам коробки, снижая между ними трение. Достаточно просто постоять пару минут с заведенным мотором, при этом селектор переводить в разные режимы не нужно, достаточно держать его в положении «N». После этого движение нужно начинать плавно, без резких рывков и проехать так хотя бы 1 км, что обеспечит полный прогрев масла. Начало движения на подъем, его преодоление, спуск
После этого движение нужно начинать плавно, без резких рывков и проехать так хотя бы 1 км, что обеспечит полный прогрев масла. Начало движения на подъем, его преодоление, спуск
движение автомобилей на гору
Многие автомобили с РКПП не оборудованы системой помощи старта на подъем, поэтому правильно начинать движение нужно научиться самому водителю. При старте на подъем с роботизированной коробкой необходимо поступать, как и с «механикой». Для начала движения селектор переводится в режим «А», плавно нажимается акселератор и одновременно авто снимается с ручника. Такое действие исключит откат авто назад. Одновременно жать на газ и снимать с ручника следует потренироваться, чтобы водитель чувствовал двигатель и понимал, когда сцепление начало включаться и можно снимать с ручника.
При начале движения на подъем в зимний период лучше использовать ручной режим, при этом устанавливать первую передачу. Сильно газовать не стоит, чтобы не было пробуксовки колес.
При движении на подъем при выбранном автоматическом режиме коробка самостоятельно начнет переходить на пониженные передачи, что является вполне логичным, ведь при повышенных оборотах преодолеть подъем легче. Такая КПП оснащена гироскопом, который определяет положение автомобиля, и если датчик показывает подъем, то коробка буде работать соответственно. Можно совершать движение и в ручном режиме, зафиксировав определенную передачу. Важно понимать, что РКПП не даст двигаться в натяг, поэтому при подъеме обороты двигателя должны быть не меньше 2500 об/мин.
Такая КПП оснащена гироскопом, который определяет положение автомобиля, и если датчик показывает подъем, то коробка буде работать соответственно. Можно совершать движение и в ручном режиме, зафиксировав определенную передачу. Важно понимать, что РКПП не даст двигаться в натяг, поэтому при подъеме обороты двигателя должны быть не меньше 2500 об/мин.
При спуске же никаких действий от водителя не требуется. Достаточно перевести селектор в положение «А», и снять ручник. При этом авто будет производить торможение мотором. Остановка, парковка
И третий немаловажный вопрос – правильность парковки и остановки. После полной остановки авто, селектор необходимо перевести в нейтраль «N», поставить на ручник и после заглушить двигатель. При кратковременных остановках перевод селектора в нейтраль необязателен, вполне можно оставаться и на режиме «А». Но стоит учитывать, что при остановке сцепление остается выжатым. Поэтому в пробке или на светофорах, когда остановка затягивается по времени, все же следует переходить на нейтраль.![]()
Это основные правила, как управлять роботизированной коробкой. Но есть и другие особенности, к примеру, некоторые РКПП имеют дополненные режимы – спорт и зимний, так называемая «снежинка».
«Снежинка» направлена на то, чтобы как можно плавнее и без пробуксовок начать движение на обледенелой дороге. Все что она делает, это обеспечивает начало движения сразу со второй передачи и более плавные переходы на повышенные передачи.
Режим «спорт» производит переход на повышенные передачи при больших оборотах, чем в обычном режиме. Это позволяет быстрее ускоряться. То есть, если при обычном режиме переход на 2 передачу выполнялся, к примеру, при 2500 об/мин, то в режиме «спорт» этот переход будет осуществляться при 3000 об/мин.
Теперь о возможности перехода из автоматического режима в ручной и обратно во время движения. Роботизированная коробка без проблем позволяет это делать. Также позволяется самостоятельно понижать или повышать передачу для изменения скорости движения. Но стоит учитывать, что полностью управление коробкой электронный блок не передаст, он будет постоянно контролировать работу.
Поэтому если водителю вздумается перейти, к примеру, на две передачи вниз, то электронный блок сделать это даст, но при этом проконтролирует обороты двигателя и если они не будут соответствовать выбранной передачи, электроника самостоятельно выполнит переход на допустимую передачу – сработает так называемая «защита от дурака».
Здесь все просто – электронный блок запрограммирован так, что каждой передаче соответствует определенный диапазон оборотов двигателя. И если выбранная вручную передача соответствует своему диапазону, то коробка выполнит переключение, а если нет – включит необходимую скорость.
Напоследок некоторые рекомендации по эксплуатации и обслуживанию роботизированной коробки.
Такая коробка «не терпит» резких нажатий на педаль газа, поэтому лучше осуществлять движение в спокойном режиме. Даже при необходимости ускориться — лучше жать на акселератор плавно, при этом стоит перейти в ручной режим. А при торможении следует наоборот – переходить в автоматический режим.
Особенностью РКПП является наличие небольших толчков при переключении передач. От них можно избавиться достаточно просто – при переключении передач сбрасывать обороты двигателя, то есть действовать по аналогии с обычной механической коробкой.
Наличие ручного режима позволяет даже выполнять выезд «враскачку» в случае, если авто застряло в сугробе. Но при этом на пользу КПП это не пойдет, так как буксовать на РКПП не рекомендуется, это может привести к декалибровке исполнительных механизмов. Поэтому застрявшее авто все же лучше извлекать с привлечением сторонней помощи.
Обязательно при каждом ТО делать инициализацию и проводить диагностику состояния РКПП, что позволит устранить все неисправности коробки еще на раннем этапе.
Есть и другие мелкие особенности таких коробок, которые зависят от изготовителя. Ими лучше сразу поинтересоваться, чтобы в дальнейшем не возникло недоразумений с эксплуатацией роботизированной коробки.
Любой из автолюбителей, сделавший выбор в пользу авто с роботизированной коробкой переключения передач, почти сразу задается вопросом: как управлять роботизированной коробкой передач?
Следует понимать, что роботизированная КПП – это, по большому счету, классическая механическая коробка, в состав которой включен небольшой электроблок, что осуществляет управление переключением передач и сцеплением.
Такие коробки роботизированного типа обладают рядом примечательных преимуществ: они надежны, комфортны и легки в эксплуатации, а также характеризуются низким расходом топлива.
На сегодняшний день практически каждый из производителей автомобилей имеет в своем модельном ряду виды, укомплектованные роботизированными КП. При этом любым заводом-изготовителем используются своя собственная уникальная технология и особое наименование.
Итак, чтобы разобраться, как правильно ездить на «роботе», и как осуществляется управление роботизированной коробкой, рассмотрим её более детально.
Устройство роботизированной КПП
Следует понимать, что «робот» — это ветвь в истории эволюции механических КП. Специалисты также называют роботизированные коробки передач гибридом механической КП и автоматической. Благодаря тому, что роботизированный механизм, автоматизированный электроблоком, начал управляться актуаторами-сервоприводами, некоторые характеристики таких КПП возросли.
Существуют роботизированные КП с ручными режимами. Некоторые разновидности «роботов» вообще позволяют эксплуатацию в 3-х различных режимах: автоматическом, полумеханическом, ручном. В первом случае вмешательство водителя в процесс переключения передач не требуется. Во втором случае водитель сможет самостоятельно контролировать сцеплением. В третьем же случае все управление ложится на плечи водителя.
Некоторые разновидности «роботов» вообще позволяют эксплуатацию в 3-х различных режимах: автоматическом, полумеханическом, ручном. В первом случае вмешательство водителя в процесс переключения передач не требуется. Во втором случае водитель сможет самостоятельно контролировать сцеплением. В третьем же случае все управление ложится на плечи водителя.
Если вы обожаете быструю езду и ярый поклонник драйва, то идеальным вариантом будет выбор «кулачковой» роботизированной КП, так как она является наиболее быстрой из всех других «роботов». Скорость переключения одной передачи составляет порядка 0,1-0,15 сек. Автомобили с такого вида коробкой снабжаются педалью сцепления, хотя её применение требуется только для того, чтобы тронуться с места. Дальше процесс переключения происходит аналогично процессу переключения в гоночных мото, то есть без использования сцепления.
Роботизированные коробки оснащаются электро- или гидроприводами сцеплений. Для первого в роли составных элементов выступают электродвигатели или сервомеханизмы. Во втором случае элементами выступают гидравлические цилиндры.
Во втором случае элементами выступают гидравлические цилиндры.
Приводами на гидроцилиндрах оснащаются автомобили следующих марок: Peugeot, Fiat, Renault, BMW, Volkswagen, Citroen и многие иные марки. На основе электропривода характерными представителями являются: Nissan, Opel, Mitsubishi и другие.
Для полного понимания вопроса, как ездить на роботизированной коробке передач, потребуется осветить ряд вопросов.
Прогрев роботизированной коробки переключения передач и особенности эксплуатации
Многим из владельцев такого типа коробок переключения передач или тем, кто их совсем недавно открыл для себя впервые, интересен вопрос: необходим ли предварительный прогрев роботизированной коробки в условии низких или экстремально низких температур?
Хотя по уверениям конструкторов и с чисто эксплуатационной точки зрения прогрев такому виду коробки передач не нужен, однако стоит учитывать важный момент – температуру масла и то, как оно ведет себя при низких температурах. Ведь некоторые разновидности масел при небольших температурах начинают густеть и скапливаться в нижней части коробки передач.
Ведь некоторые разновидности масел при небольших температурах начинают густеть и скапливаться в нижней части коробки передач.
Стандартная процедура прогрева заключается в том, чтобы на несколько минут оставить машину в заведенном виде, а во время прогрева селектор оставить в покое. При этом трогаться лучше плавно и спокойно, избегая рывков и толчков. Следите за оборотами: их уровень должен быть на минимуме в районе около одного километра.
В любом случае, подобную процедуру можно и даже рекомендуется проводить и в летнее время, что позволит всем элементам трансмиссии и коробки передач получить достаточно жидкую смазку.
Такие меры перед непосредственным началом движения сыграют очень положительную роль в сроке службы любого авто и предотвратят истирание и износ отдельных элементов.
Для того, чтобы избежать преждевременного выхода из строя как составных частей коробки переключения передач, так и трансмиссии в целом, рекомендуется соблюдать ряд определенных правил:
- Категорически не рекомендуется буксовать при низких температурах.
 В таких условиях букс становится губительным для системы исполнения в целом и может привести к разкалибровке.
В таких условиях букс становится губительным для системы исполнения в целом и может привести к разкалибровке. - Также важно избегать заснеженных участков дороги, так как существует определенная вероятность просто-напросто застрять, что приведет к нежелательным пробуксовкам.
- «Липучки» лучше не покупать, а выбрать сразу же резину с шипами.
- В моменты долгих простоев или когда машина просто «ночует» во дворе вашего дома, её лучше оставить на передаче со значением «Е». Разумеется, при условии выключенного двигателя.
- В случае, когда дорожное покрытие ненадлежащего качества, рекомендуется трогаться, не газуя, со второй передачи.
Стартуем правильно: движемся на возвышенность, преодолеваем её и спускаемся
Всем тем, кто выбрал роботизированную коробку переключения передач, или тем, кто только собирается это сделать, следует учесть одну важную деталь: некоторые из автомобилей, содержащих её в составе своей трансмиссии, часто не оснащаются дополнительной функцией помощи при старте на возвышении. Именно поэтому крайне важно выучиться самостоятельно осуществлять передвижение при условии движения по наклонной дороге.
Именно поэтому крайне важно выучиться самостоятельно осуществлять передвижение при условии движения по наклонной дороге.
Поведение водителя в данной ситуации должно быть аналогично поведению при использовании механической коробки переключения передач, поэтому тем, кто на «роботов» перебрался с «механики», будет проще. Опишем процесс детальнее: селектор переводим в положение «А», затем легонько и равномерно нажимаем на акселератор; в это же время не спеша снимаем машину с ручника.
Если условия, в которых осуществляется подъем на возвышенность, характеризуются низкой температурой и повышенной влажностью, то может потребоваться ручное управление или режим «М1». Важно при этом помнить о том, чтобы давление на газ было допустимо возможным, такая мера предотвратит образование ситуации с пробуксовкой.
При наличии в автомобиле гироскопа, когда выбран авторежим, роботизированная коробка самостоятельно начнет выбирать нужные передачи и, соответственно, переключать их. При условии такого движения переключение будет осуществляться преимущественно на понижение. Опытным водителям в зависимости от ситуации можно выбрать функцию «М» при фиксации текущей скорости. В случае, когда водитель решил выбрать скоростной режим самостоятельно, ему рекомендуется выбрать её и соблюдать обороты в диапазоне 2500-5000, не ниже и не выше. Это табу!
Опытным водителям в зависимости от ситуации можно выбрать функцию «М» при фиксации текущей скорости. В случае, когда водитель решил выбрать скоростной режим самостоятельно, ему рекомендуется выбрать её и соблюдать обороты в диапазоне 2500-5000, не ниже и не выше. Это табу!
Что касается движения по спуску, то делать ничего особенно не потребуется, кроме как перевести селективный рычаг в положение «А» и отключить ручной тормоз.
устройство коробки передач робот
Эксплуатация роботизированной коробки передач в городских условиях
Среди специалистов и заядлых автолюбителей распространено убеждение, что городские условия вкупе с пробками часто пагубно влияют на срок службы роботизированной коробки переключения передач. Чтобы избежать такого пагубного эффекта, при полной остановке автомобиля рекомендуется выставлять селективный рычаг в положение «N», после чего активировать ручной тормоз и заглушить двигатель. В случае же, когда остановки носят кратковременный характер, применение положения «N» не потребуется, можно остаться в положении «А».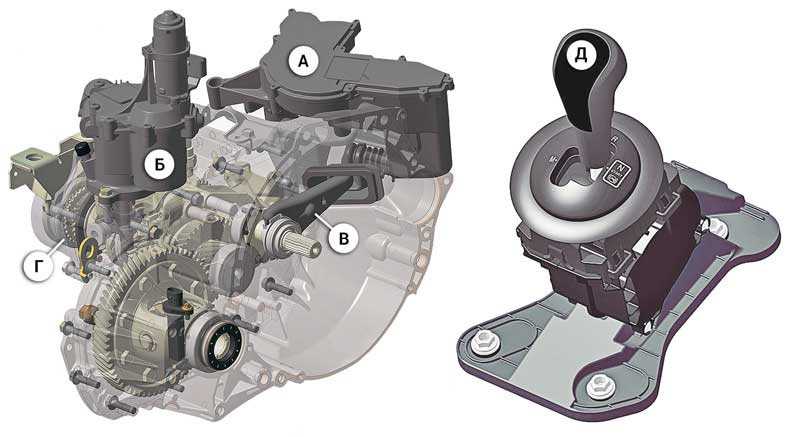
Стоит также учитывать, что в пробках длиною более минуты мотор скорее всего потребуется заглушить.
НЕ ТРАТЬТЕ ДЕНЬГИ НА ПЕРЕКРАСКУ!
Теперь Вы сами сможете всего за 5 секунд убрать любую царапину с кузова вашего автомобиля.
В целом и общем
Итак, тонкости и нюансы езды на роботизированной коробке передач мы рассмотрели, осталось освоить немного полезных правил, которые будут особенно полезны новичкам и неопытным водителям, в частности тем, кто сталкивается с роботизированной коробкой переключения передач впервые:
- При осуществлении старта не стоит нажимать до упора на газ, при желании набрать скорости её следует топить уверенно, но вместе с тем и равномерно, плавно.
- Для того, чтобы избежать характерные для роботизированной коробки переключения передач рывки и подёргивания, специалисты и просто заядлые автовладельцы с «роботами» рекомендуют регулярно осуществлять процесс инициализации в специальных сервисных центрах.
- При наборе скорости и особенно интенсивном ускорении рекомендуется применять навыки работы с механическими коробками (разумеется, при условии, что вы ранее на ней ездили самостоятельно).
Также следует помнить и учитывать тот факт, что существуют некоторые дополнительные положения, кроме рассмотренных нами.
Некоторые из роботизированных коробок имеют режимы вроде «зимний» или «спорт». Первый режим устроен так, что дает плавность и контроль при езде по зимней дороге. Второй же дает возможность перейти на повышение передачи при условии больших оборотов, а это делает возможным быстрое ускорение.
Заключение
Итак, перед тем, как выбрать роботизированную коробку передач как основу трансмиссии вашего будущего автомобиля, внимательно ознакомьтесь с особенностями и тонкостями работы и езды на ней, чтобы избежать большинства ошибок, допускаемых новичками, а также сохранить все её элементы в целости и сохранности на долгие годы. Удачи на дорогах!
Скоро привычную ( — в русской версии) переключения передач заменит селектор с таким вот пазом в виде буквы «зю». И тренировать левую ногу в автомобиле будет уже нечем.
Чтобы ответить на этот вопрос, придётся вспомнить устройство обычной механической коробки передач. Основу классической «механики» составляют два вала — первичный (ведущий) и вторичный (ведомый). На первичный вал через механизм сцепления передаётся крутящий момент от двигателя. Со вторичного вала преобразованный момент идёт на ведущие колёса. И на первичный, и на вторичный валы посажены шестерни, попарно находящиеся в зацеплении. Но на первичном шестерни закреплены жёстко, а на вторичном — свободно вращаются. В положении «нейтраль» все вторичные шестерни прокручиваются на валу свободно, то есть крутящий момент на колёса не поступает.
Перед включением передачи водитель выжимает сцепление, отсоединяя первичный вал от двигателя. Затем рычагом КПП через систему тяг на вторичном валу перемещаются специальные устройства — синхронизаторы. При подведении муфта синхронизатора жёстко блокирует на валу вторичную шестерню нужной передачи. После включения сцепления крутящий момент с заданным коэффициентом начинает передаваться на вторичный вал, а от него — на главную передачу и колёса. Для сокращения общей длины коробки вторичный вал часто делят на два, распределяя ведомые шестерни между ними.
Упрощённая схема работы механической коробки передач.
Принцип действия роботизированных коробок передач абсолютно тот же. Единственное отличие в том, что смыканием/размыканием сцепления и выбором передач в «роботе» занимаются сервоприводы — актуаторы. Чаще всего это шаговый электромотор с редуктором и исполнительным механизмом. Но встречаются и гидравлические актуаторы.
Роботизированная КПП SensoDrive применяется на автомобилях марки Citroen.
Управляет актуаторами электронный блок. По команде на переключение первый сервопривод выжимает сцепление, второй перемещает синхронизаторы, включая нужную передачу. Затем первый плавно отпускает сцепление. Таким образом, педаль сцепления в салоне больше не нужна — при поступлении команды электроника всё сделает сама. В автоматическом режиме команда на смену передачи поступает от компьютера, учитывающего скорость движения, обороты двигателя, данные ESP, ABS и других систем. А в ручном — приказ на переключение отдаёт водитель при помощи селектора КПП или подрулевых лепестков.
Фирма Ricardo на примере «робота» Easytronic от модели Opel Corsa предложила заменить раздельные актуаторы для сцепления и выбора передачи одиночным электромагнитным актуатором. Благодаря этому уменьшились размеры и масса агрегата. И самое главное — механизм выбора передачи стал работать в восемь раз быстрее, а общий период разрыва потока мощности сократился до 0,35 с. Вверху — серийный Easytronic, внизу — рисунок разработки Ricardo.
Проблема «робота» — отсутствие обратной связи по сцеплению. Человек чувствует момент смыкания дисков и может переключить скорость быстро и плавно. А электроника вынуждена перестраховываться: чтобы избежать рывков и сохранить сцепление, «робот» надолго разрывает поток мощности от двигателя к колёсам во время переключения. Получаются дискомфортные провалы на разгоне. Единственный способ достичь комфорта при переключениях — сократить их время. А это, увы, означает рост цены всей конструкции.
Пионером массового использования преселективных коробок стал концерн Volkswagen, использующий DSG ( у Audi) как на переднеприводных, так и на полноприводных моделях с продольно и поперечно установленными двигателями. Аббревиатура DSG (Direct Shift Gearbox — коробка прямого включения) стала нарицательным для коробок с двумя сцеплениями — хотя на самом деле это просто товарный знак.
Революционным решением стала появившаяся в начале трансмиссия с двумя сцеплениями DCT (dual clutch transmission). Рассмотрим её работу на примере коробки DSG концерна Volkswagen. У коробки два вторичных вала с расположенными на них ведомыми шестернями и синхронизаторами — как у шестиступенчатой «механики» Гольфа. Фокус в том, что первичных валов тоже два: они вставлены друг в друга по принципу матрёшки. Каждый из валов соединяется с двигателем через отдельное многодисковое сцепление. На внешнем первичном валу закреплены шестерни второй, четвёртой и шестой передач, на внутреннем — первой, третьей, пятой и заднего хода. Допустим, автомобиль начинает разгон с места. Включается первая передача (муфта блокирует ведомую шестерню первой передачи). Замыкается первое сцепление, и крутящий момент через внутренний первичный вал передаётся на колёса. Поехали! Но одновременно с включением первой передачи умная электроника прогнозирует последующее включение второй — и блокирует её вторичную шестерню. Именно поэтому такие коробки ещё называют преселективными. Таким образом, включены две передачи сразу, но заклинивания не происходит, — ведущая шестерня второй передачи находится на внешнем валу, сцепление которого пока разомкнуто.
Состояние DSG при движении на первой передаче. Муфтами блокированы шестерни и передач.
Когда машина достаточно разгонится и компьютер решит повысить передачу, размыкается первое сцепление и одновременно замыкается второе. Крутящий момент теперь идёт через внешний первичный вал и пару второй передачи. На внутреннем валу уже выбрана третья. При замедлении те же операции происходят в обратном порядке. Переход происходит практически без разрыва потока мощности и с фантастической скоростью. Серийная коробка Гольфа переключается за восемь миллисекунд. Сравните со 150 мс на Ferrari Enzo!
Состояние DSG после переключения на передачу. передача ожидает своей очереди.
Коробки с двойным сцеплением экономичнее и быстрее традиционных механических, а также более комфортны, чем «автоматы». Главный их недостаток — высокая цена. Вторую проблему — неспособность передавать большой крутящий момент — решили с появлением DSG фирмы Ricardo на купе Bugatti Veyron. Но пока удел большинства суперкаров — «роботы». Хотя, например, коробка Ferrari 599 GTB Fiorano — не чета опелевскому Изитронику: время переключения у суперробота исчисляется десятками миллисекунд.
Роботизированная коробка AMG Speedshift, устанавливаемая на новейший SL 63 AMG, представляет собой модифицированный мерседесовский «автомат» . Только крутящий момент вместо тяжёлого и инертного гидротрансформатора передаёт одинарное многодисковое «мокрое» сцепление. Благодаря применению сложных электрогидравлических актуаторов время переключения составляет 0,1 с.
Сегодня коробки DCT есть не только у Фольксвагена, но и у компаний BMW, Ford, Mitsubishi и FIAT. Преселективные коробки признали даже инженеры Porsche, которые используют в своих машинах только проверенные технологии. Аналитики прогнозируют, что в будущем наиболее распространёнными трансмиссиями станут DCT и вариаторы. А дни третьей педали, похоже, сочтены — скоро она исчезнет даже из самых драйверских спорткаров. Человечество выбирает то, что удобнее.
Как правильно ездить на автомобиле с коробкой DSG, чтобы продлить её ресурс – Akpp Wiki
Сегодня автомобили с роботизированной коробкой передач (РКПП, АМТ) составляют серьезную конкуренцию классическому гидромеханическому автомату АКПП и вариатору CVT по целому ряду причин. Прежде всего, коробка робот дешевле в производстве, также РКПП позволяет обеспечить высокую топливную экономичность, что особенно актуально с учетом жестких экологических норм и стандартов.
При этом на первый взгляд может показаться, что роботизированная трансмиссия не отличается от привычной АКПП, однако это не так. С учетом определенных особенностей и конструктивных отличий, необходимо знать, как пользоваться коробкой робот, чтобы добиться максимального комфорта при езде и продлить срок службы агрегата.
Особенности вождения с роботизированной коробкой
Поскольку робот является компромиссным вариантом конструкции, следует учитывать некоторые особенности управления автомобилем. Например, роботизированный агрегат не всегда корректно переключает скорости, что приводит к падению интенсивности разгона. При резком нажатии на педаль газа передачи переключаются вниз с запаздыванием. Эту особенность следует учитывать при совершении обгона на трассе, особенно с выездом на полосу встречного движения.
Требуется ли прогрев
При прогреве двигателя не требуется устанавливать селектор коробки в различные положения по аналогии с гидромеханическими агрегатами. После начала движения рекомендуют проехать 1-2 км на пониженной скорости, чтобы снизить нагрузки на трущиеся поверхности. Поскольку картер коробки находится на удалении от силового агрегата, нагрев масла в трансмиссии происходит через 10-15 км пути.
Начало движения на подъем его преодоление спуск
В конструкции роботизированных агрегатов не используется ассистент старта в гору. Исключение составляют некоторые марки автомобилей.
Чтобы начать двигаться в гору на автомашине с коробкой робот, необходимо перевести рычаг в положение A, одновременно удерживая автомобиль стояночной тормозной системой. Затем водитель отпускает рычаг тормоза и увеличивает частоту вращения двигателя.
Для снижения отката автомашины водителю необходимо поймать момент включения сцепления и одновременно отпустить рычаг ручного тормоза. Перед началом эксплуатации автомобиля рекомендуют выполнить несколько пробных попыток старта на горке, чтобы понять момент начала работы сцепления. В зимнее время коробка переключается в режим ручного выбора ступени, что снижает пробуксовку в начале движения. После разгона скорости переключаются принудительно или селектор переводится в положение автоматической работы.
При увеличении скорости коробка будет повышать передачи, но если частота вращения мотора упадет, трансмиссия перейдет на пониженную скорость в автоматическом режиме. При движении на спусках рычаг остается в положении А, педаль газа отпускается для торможения двигателем.
Остановка и парковка
Автомобиль с роботизированным агрегатом останавливается при помощи штатных тормозов. Затем водитель устанавливает рычаг коробки в нейтральное положение и включает стояночный тормоз. Педаль тормоза отпускается, водитель может заглушить двигатель и вынуть ключ из замка. При остановках, например, на светофоре, допускается оставлять селектор в положении движения вперед. При длительной стоянке необходимо перевести рычаг в нейтральную позицию, поскольку в выжатом положении сцепление изнашивается.
Другие режимы
Роботизированные коробки передач поддерживают дополнительные режимы работы:
- Режим, обозначаемый пиктограммой в виде снежинки, предназначен для передвижения в зимнее время. Контроллер коробки обеспечивает старт со второй передачи и меняет алгоритм переключения скоростей, снижая пробуксовку колес на скользком дорожном покрытии.
- Функция «спорт» позволяет переключать передачи при повышенной частоте вращения коленчатого вала, что обеспечивает динамичный разгон.
- Ручной режим, позволяющий принудительно управлять коробкой передач.
Прогрев роботизированной коробки переключения передач и особенности эксплуатации
Многим из владельцев такого типа коробок переключения передач или тем, кто их совсем недавно открыл для себя впервые, интересен вопрос: необходим ли предварительный прогрев роботизированной коробки в условии низких или экстремально низких температур?
Хотя по уверениям конструкторов и с чисто эксплуатационной точки зрения прогрев такому виду коробки передач не нужен, однако стоит учитывать важный момент – температуру масла и то, как оно ведет себя при низких температурах. Ведь некоторые разновидности масел при небольших температурах начинают густеть и скапливаться в нижней части коробки передач.
Стандартная процедура прогрева заключается в том, чтобы на несколько минут оставить машину в заведенном виде, а во время прогрева селектор оставить в покое. При этом трогаться лучше плавно и спокойно, избегая рывков и толчков. Следите за оборотами: их уровень должен быть на минимуме в районе около одного километра.
В любом случае, подобную процедуру можно и даже рекомендуется проводить и в летнее время, что позволит всем элементам трансмиссии и коробки передач получить достаточно жидкую смазку.
Такие меры перед непосредственным началом движения сыграют очень положительную роль в сроке службы любого авто и предотвратят истирание и износ отдельных элементов.
Для того, чтобы избежать преждевременного выхода из строя как составных частей коробки переключения передач, так и трансмиссии в целом, рекомендуется соблюдать ряд определенных правил:
- Категорически не рекомендуется буксовать при низких температурах. В таких условиях букс становится губительным для системы исполнения в целом и может привести к разкалибровке.
- Также важно избегать заснеженных участков дороги, так как существует определенная вероятность просто-напросто застрять, что приведет к нежелательным пробуксовкам.
- «Липучки» лучше не покупать, а выбрать сразу же резину с шипами.
- В моменты долгих простоев или когда машина просто «ночует» во дворе вашего дома, её лучше оставить на передаче со значением «Е». Разумеется, при условии выключенного двигателя.
- В случае, когда дорожное покрытие ненадлежащего качества, рекомендуется трогаться, не газуя, со второй передачи.
Как правильно двигаться в городских пробках
Движение в плотном городском трафике никак не влияет на срок службы АКПП, но для «робота» может быть губительным, если не соблюдать простые правила. Дело в том, что у роботизированных коробок, в отличие от автомата, есть сцепление. При постоянном движении в пробке по несколько метров оно преждевременно изнашивается. Это объясняется неизбежной его пробуксовкой при начале движения. Каждый раз, отпуская педаль тормоза и подтягиваясь на несколько сантиметров ближе к впереди стоящему автомобилю, владелец DSG приближается к визиту в автосервис.
Вопреки распространенному мнению, при движении в пробке не нужно ставить селектор в положение «N», достаточно поставить ногу на тормоз. В этом случае диск сцепления и маховик размыкаются автоматически. Но для того, чтобы трансмиссия жила долго, нужно каждый раз дожидаться, пока дистанция до переднего автомобиля будет не менее нескольких метров.
Техобслуживание роботизированной трансмиссии
Чтобы роботизированная коробка передач прослужила как можно дольше, ее необходимо с периодичностью примерно один раз в 50 тыс. км пробега обслуживать и диагностировать на станции ТО, где есть специальное оборудование и квалифицированные специалисты.
Если не соблюдать регламент, трансмиссия выйдет из строя раньше времени, и тогда ремонт обойдется дороже.
Самостоятельный ремонт РКПП проводить не рекомендуется – неквалифицированный подход к делу может погубить коробку окончательно, и тогда ее придется полностью менять.
Основные отличия АКПП от РКПП
- Первое отличие в конструкции. В случае с роботом это механика с блоком управления, устройство автоматики совсем другое.
- Плавность и скорость переключений у автоматики лучше.
- Почти все АКПП лишены функции ручного переключения, тогда как у роботизированной трансмиссии данная функция присутствует.
- Еще одно отличие робота от автомата заключается в бюджетном ремонте и обслуживании первого.
- Экономия также выражается в том, что робот потребляет меньше масла и топлива.
Плюсы и минусы РКПП
| Преимущества | Недостатки |
|
|
Быстрый старт: быть или не быть?
Любители динамичного разгона часто стартуют с места, одновременно выжимая газ и тормоз. Это делается для того, чтобы увеличить обороты двигателя, а затем отпустить тормоз и максимально быстро рвануть с вперед. Этот прием не подходит для роботизированных коробок.
Современные «роботы» оснащены защитным механизмом. При нажатии на тормоз электроника препятствует смыканию диска сцепления с маховиком, поэтому обороты двигателя расти не будут. Автомобиль в такой ситуации не пострадает, но и смысла в данной манипуляции нет никакого.
Хуже обстоит дело на машинах, где подобная защита не предусмотрена. При нажатии на газ диски смыкаются, но педаль тормоза не дает автомобилю двинуться с места. В результате происходит пробуксовка дисков, появление на них повреждений и преждевременная выработка ресурса моховика.
Недостатки коробки передач
Даже с таким перечнем преимуществ устройство имеет и свои недостатки, которые, возможно, отпугивают какую-то долю водителей. Рассмотрим их.
- К сожалению, банальные и самые дешевые коробки-роботы не способны подстраиваться под особенное вождение того или иного водителя. В этом его превзошла автоматическая трансмиссия, которая с легкостью адаптируется под стиль езды. Здесь же имеется лишь один вид вождения. Он вшит, как стандартный, в прошивку.
- Если коробка-робот (отзывы в этом нюансе довольно негативны) установлена в комплекте с электрическим сервоприводом, то она показывает небольшую задержку в работе. То есть получаемая пауза между передачей сигнала и самим переключением достигает порой двух секунд. Это не является серьезным недостатком, однако может приносить неудобства при совершении равномерной езды и разгоне.
- Если же используется гидравлический привод вместе с роботизированной коробкой, то нужно заметить, что переключение ускоряется практически до 0. 05 секунд. Это кажется небольшой цифрой, однако при езде ощущается. Но такой привод как дорого покупать, так и недешево устанавливать. Более того, он сильно нагружает мотор в энергетическом плане, поэтому зачастую его используют в спорткарах или других дорогих машинах.
Устройство роботизированной КПП
Роботизированная коробка представляет собой механическую ступенчатую трансмиссию, дополненную электронным блоком управления. Управление муфтой сцепления и переключение скоростей производится исполнительными сервоприводами (электрическими или гидравлическими). Для начала движения водителю необходимо поставить селектор в положение A (перемещение вперед) или R (движение назад), а затем отпустить педаль тормоза.
Блок управления переключает скорости в зависимости от частоты вращения коленчатого вала и сопротивления движению. В конструкции контроллера предусмотрен специальный датчик, фиксирующий угол наклона автомашины. В зависимости от положения автомобиля корректируется работа роботизированной коробки.
В конструкции коробки предусмотрен режим ручного переключения, обозначаемый литерой M. Для выбора скорости необходимо нажимать на селектор вперед или назад, повышая или понижая передачу. Электронный контроллер отслеживает режим работы двигателя и скорость движения, в памяти устройства зашиты допустимые соотношения скоростей и оборотов силового агрегата. Например, блок не допустит попытки тронуться с 3-й передачи или перекрутить коленчатый вал мотора ошибочным включением пониженного передаточного отношения при движении на трассе.
Обслуживание роботизированной коробки заключается в проведении компьютерной диагностики, позволяющей определить остаточную толщину фрикционных накладок сцепления. При неаккуратном обращении с трансмиссией происходит ускоренный износ накладок муфты сцепления. Изменение размерных цепей негативно влияет на работу исполнительных механизмов, проходящих калибровку в заводских условиях.
При проведении ежегодного обслуживания автомашины или через каждые 10-15 тыс. км выполняется адаптация конструкции, позволяющая компенсировать износ накладок. Пренебрежение процедурой адаптации приводит к некорректной работе агрегата и его переходу в аварийный режим. В механической части трансмиссии производится замена масла на жидкость, рекомендованную изготовителем. Периодичность обслуживания агрегата зависит от производителя, рекомендации приведены в сервисной книжке автомобиля.
Устройство и принцип работы роботизированной КПП с одним сцеплением
Робот с гидроприводами переключения передач
Роботизированная КПП может быть с одним и с двумя сцеплениями. С роботом с двумя сцеплениями можно ознакомиться в статье про Powershift. Мы же продолжим разговор о КПП с одним сцеплением.
Устройство робота достаточно простое и включает в себя следующие элементы:
- механическая часть;
- сцепление;
- приводы;
- система управления.
Механическая часть содержит все компоненты обычной механики, а принцип работы роботизированной АКПП схож с принципом работы МКПП.
Приводы, управляющие коробкой, могут быть гидравлическими и электрическими. При этом один из приводов следит за сцеплением, он отвечает за его включение и выключение. Второй – управляет механизмом переключения передач. Практика показала, что КПП с гидроприводом функционирует лучше. Как правило, такая коробка применяется на более дорогих автомобилях.
Роботизированная коробка передач имеет и режим ручного переключения передач. В этом ее уникальность – переключать передачи может как робот, так и человек.
Система управления – электронная и включает в себя следующие детали:
- входные датчики;
- электронный блок управления;
- исполнительные устройства (актуаторы).
Схема работы РКПП
Входные датчики отслеживают основные параметры работы КПП. К ним относятся частота вращения, положение вилок и селектора, уровень давления и температура масла. Все данные передаются в блок управления, который контролирует актуаторы. Исполнительное устройство, в свою очередь, управляет с помощью сервоприводов.
В роботизированной АКПП гидравлического типа система управления дополнительно оснащена гидравлическим блоком управления. Он управляет работой гидроцилиндров.
Принцип работы робота осуществляется двумя способами: автоматическим и полуавтоматическим. В первом случае коробка управляется через определенный алгоритм, который задается блоком управления на основе сигналов датчиков. Во втором – принцип работы идентичен ручному переключению передач. Передачи с помощью рычага селектора последовательно переключаются с высшей на низшую, и наоборот.
Резкое изменение скорости
«Робот» DSG c двойным сцеплением работает следующим образом: одно сцепление отвечает за четные передачи, другое — за нечетные. Электроника подстраивается под манеру вождения водителя, заранее включает нужную скорость, а затем в нужный момент времени просто включает сцепление. Соответственно, если вы нажимаете на газ, трансмиссия готовится включить повышенную передачу, если тормозите — пониженную. При агрессивной езде с резкими торможениями после разгона и наоборот автоматика не успевает выбирать нужную скорость и переключает передачи в экстренном режиме. Это приводит к ударам по диску сцепления, появлению на нем повреждений и сокращению срока службы.
Если вы хотите пощекотать нервы, выбирайте ручной режим переключения передач. Это позволит даже при резких изменениях скорости выбирать корректную скорость и не вводить в заблуждение автоматику, настроенную на комфортный, предсказуемый стиль езды.
Особенности управления
Некоторые режимы работы РКПП получила от автоматической коробки, а именно:
- «N» — нейтраль. Режим, при котором крутящий момент на колеса от КПП не передается. То есть двигатель работает, на коробку передается вращение, но из-за положения шестерен на колеса оно не передается. Используется при длительной стоянке авто, перед началом движения, после остановки;
- «R» — движение задним ходом. Здесь все просто, водитель переводит селектор в это положение и авто движется назад.
Другие же режимы роботизированной коробки имеют свое обозначение:
- «А/М» или «Е/М» — движение вперед. Этот режим соответствует режиму «D» автоматической коробки, то есть автомобиль движется вперед, а КПП производит переключение передач. В режиме «М» выполняется ручное управление. Переводом селектора в определенный паз выбирается необходимый режим;
- «+», «-» — переключатель передач. Кратковременные переводы селектора в сторону «+» или «-» обеспечивают переключение передачи при ручном режиме управления «М».
Буксировка и пробуксовка
Коробки DSG не рассчитаны на большие нагрузки. Обычно они устанавливаются на автомобили, которые вместе с водителем и пассажирами весят не более двух тонн. Если вы хотите буксировать другое транспортное средство или тяжелый прицеп с помощью своего авто, помните, что «робот» может не справиться с такими перегрузками. Если не хотите рисковать трансмиссией, откажитесь от этой затеи.
Владельцы автомобилей с роботизированной трансмиссией должны знать, что этот агрегат боится пробуксовок. Такая ситуация может возникнуть при попытке тронутся с места на скользкой поверхности, а также при резком старте в ручном режиме. К сожалению, в наших реалиях иногда не удается избежать пробуксовки, но все же постарайтесь. Автомобиль с роботизированной КПП — это не внедорожник, поэтому подумайте перед тем, как ехать в грязь или на скользкую колею.
Начало движения на подъем, его преодоление, спуск
Многие автомобили с РКПП не оборудованы системой помощи старта на подъем, поэтому правильно начинать движение нужно научиться самому водителю. При старте на подъем с роботизированной коробкой необходимо поступать, как и с «механикой». Для начала движения селектор переводится в режим «А», плавно нажимается акселератор и одновременно авто снимается с ручника. Такое действие исключит откат авто назад. Одновременно жать на газ и снимать с ручника следует потренироваться, чтобы водитель чувствовал двигатель и понимал, когда сцепление начало включаться и можно снимать с ручника.
При начале движения на подъем в зимний период лучше использовать ручной режим, при этом устанавливать первую передачу. Сильно газовать не стоит, чтобы не было пробуксовки колес.
При движении на подъем при выбранном автоматическом режиме коробка самостоятельно начнет переходить на пониженные передачи, что является вполне логичным, ведь при повышенных оборотах преодолеть подъем легче. Такая КПП оснащена гироскопом, который определяет положение автомобиля, и если датчик показывает подъем, то коробка буде работать соответственно. Можно совершать движение и в ручном режиме, зафиксировав определенную передачу. Важно понимать, что РКПП не даст двигаться в натяг, поэтому при подъеме обороты двигателя должны быть не меньше 2500 об/мин.
При спуске же никаких действий от водителя не требуется. Достаточно перевести селектор в положение «А», и снять ручник. При этом авто будет производить торможение мотором.
Эксплуатация роботизированной коробки передач: нюансы
Итак, если в автомобиле стоит роботизированная коробка автомат (робот), как пользоваться такой КПП, мы рассмотрим ниже. Казалось бы, данная коробка похожа на АКПП по принципу работы и не сильно отличается от аналога. Другими словами, нужно только перевести селектор в то или иное положение, после чего автомобиль начнет движение, причем дальнейшая езда будет похожа на машину с классической АКПП.
Сразу отметим, РКПП сильно отличается от автомата с гидротрансформатором. По этой причине нужно знать, как управлять коробкой робот, а также правильно эксплуатировать такую КПП.
Нужно ли прогревать машину зимой?
Как управлять роботизированной коробкой передач? Для начала нужно определиться с тем, есть ли необходимость в прогревании коробки перед началом использования в зимнее время. Если вы используете автоматическое приспособление, то знаете о том, что в холода нельзя обойтись без предварительного прогрева, который выполняется путем непродолжительного перевода селектора во все существующие положения.
Езда на автомобиле с роботизированной коробкой передач не требует проведения дополнительных манипуляций, даже если за окном минусовая температура. Однако, зимой коробку передач все же следует подготовить к предстоящей эксплуатации. Дело в том, что в то время, когда машина стоит, масло, находящееся внутри устройства, стекает вниз и из-за пониженных температур, его консистенция изменяется: вещество становится намного гуще.
По этой причине в холодное время года рекомендуется запустить мотор и выждать некоторое время для того, чтобы масло разогрелось и распределилось по всем элементам, входящим в состав коробки. Это позволит сократить трение и уменьшить износ деталей, соприкасающихся между собой. Чтобы процесс прошел успешно, требуется выстоять две минуты, заведя двигатель.
Затем можно плавно, стараясь не делать резких рывков, переместиться на километр, что поспособствует оптимальному прогреву масляной жидкости.
Правильное переключение режимов и парковка
DSG не любит резких движений. Именно поэтому переключать режимы нужно плавно. Автоматика быстро перестраивается, но для этого ей нужно некоторое время. Всего секундная задержка при изменении положения селектора значительно продлит срок службы трансмиссии. Не стоит дергать ручку КПП.
При стоянке автомобиль удерживается на месте с помощью блокировочного механизма. Но если вы часто ставите машину под уклон, рекомендуется пользоваться стояночным тормозом. Это снимает нагрузку с ограничителя и продлевает срок его службы. Но помните, что зимой тормозные колодки при использовании ручного тормоза могут примерзнуть.
Коробка-робот на «Опеле-Астра»
Уже выше рассмотрели общую ситуацию по «Опелю», отдельно хотелось бы затронуть автомобиль Astra, в котором использовалась коробка-робот. «Астре», отзывы о которой спорные, но неплохи, досталась конструкция первого поколения, поэтому можно сказать, что рассчитана она на любителя. Причем речь идет о процессе эксплуатации, а не о ремонте. Некоторые водители отмечают, что с такой коробкой лучше, чем с механической. Однако при этом ее работа намного хуже, если сравнивать с обычной и наиболее известной автоматизированной. Многие о коробка-робот не любит пробок и иногда начинает давать сбои в работе. В зависимости от характера поломки, устройство может быть намного дешевле для ремонта, чем автоматизированная трансмиссия. Однако говорить, что это действительно так во всех случаях, нельзя.
Как правильно ездить на коробке робот: что нужно знать
Сегодня автомобили с роботизированной коробкой передач (РКПП, АМТ) составляют серьезную конкуренцию классическому гидромеханическому автомату АКПП и вариатору CVT по целому ряду причин. Прежде всего, коробка робот дешевле в производстве, также РКПП позволяет обеспечить высокую топливную экономичность, что особенно актуально с учетом жестких экологических норм и стандартов.
При этом на первый взгляд может показаться, что роботизированная трансмиссия не отличается от привычной АКПП, однако это не так. С учетом определенных особенностей и конструктивных отличий, необходимо знать, как пользоваться коробкой робот, чтобы добиться максимального комфорта при езде и продлить срок службы агрегата.
Читайте в этой статье
Какие режимы еще существуют?
Выше перечислены основные правила, которые следует соблюдать, управляя машиной с роботизированной коробкой. Однако, есть и иные особенности, о которых следует знать. Например, некоторые изделия предполагают вспомогательные режимы, а не только те, что были перечислены выше. Это такие виды передач как: спортивный и зимний (его еще называют «снежинкой»). Последний из представленных режимов нужен для того, чтобы безопасно перемещаться по трассе, покрытой льдом. Он обеспечивает плавный переход на более высокие скорости.
Обслуживание
Производитель заявляет, что «робот» DSG не нуждается в обслуживании, а залитое на заводе масло рассчитано на весь срок эксплуатации. Но опыт мастеров говорит об обратном. Если вы хотите, чтобы трансмиссия служила максимально долго, каждые 50-60 тысяч пробега необходимо производить замену трансмиссионной жидкости.
Перед тем, как сесть за руль своего новенького авто, обязательно прочитайте рекомендации по использованию роботизированной коробки DSG. Ее эксплуатация схожа с классическим автоматом, но некоторые нюансы все-таки есть. Если их учитывать, трансмиссия будет исправно служить длительное время и радовать плавностью и быстротой переключения передач.
edit this post
Устройство коробки передач
Выясняя особенности такой конструкции, необходимо обратить внимание на соответствующие отзывы. Коробка-робот требует специфического с собой обращения, но для того чтобы понять почему, понадобится разобраться в ее устройстве.
По предварительному описанию можно подумать, что в целом конструкция представляет собой простой автомат с особенным управлением. Однако это не так. Рассмотрим более детально данный вопрос.
Конструкция базируется на механической коробке, которая, по отзывам как профессионалов, так и обычных водителей, считается более надежной, чем автоматическая. Это можно понять, читая в интернете отзывы. Коробка-робот имеет специальные устройства. Они необходимы для того, чтобы при переключении скоростей выжимать сцепление.
Стоит заметить, что, пользуясь обычной механической коробкой передач, водитель самостоятельно выбирает время переключения. Для этого он акцентирует внимание на том, что происходит на дороге и использует педаль сцепления совместно с рычагом самой трансмиссии. При разработке нового устройства, которое получило спорные от водителей отзывы, коробка-робот показала себя с совершенно другой стороны. Было принято решение исключить из вышеописанного процесса непосредственные действия водителя. Все важные переключения осуществляет компьютер. Для удачного функционирования робота были установлены специальные узлы-актуаторы. За счет них и стало возможным переключение передач, которым руководит сам компьютер.
Судя по отзывам, потребители отмечают несколько основных преимуществ. Речь идет об огромной экономии топлива, легкости в ремонте. Также некоторым потребителям нравится отсутствие педали сцепления. Еще одним преимуществом, выделяемым водителями, является то, что имеется возможность ручным способом сменить передачу.
Советы и хитрости езды на АМТ
Чтобы приноровиться к коробке-роботу и увеличить срок её эксплуатации, можно следовать маленьким хитростям, чтобы езда доставляла удовольствие и не вызывала негативных эмоций.
- Один из самых неприятных моментов, который может случиться в дороге с АМТ – перегрев сцепления. Чтобы это не происходило, в пробке при остановке дольше, чем на 10 секунд, можно ставить коробку в положение «нейтраль», а при долгом подъёме принудительно понижать передачу в ручном режиме. Если коробка перегрелась, на панели появится значок. Нужно остановиться, выключить машину и подождать, пока АМТ остудится.
- Чтобы избежать рывков при переключении передач во время разгона, нужно нажать, а потом приотпустить педаль газа в тот момент, когда вы чувствуете скорое переключение скоростей. После переключения можно дальше плавно набирать скорость.
- При каждом ТО проводите калибровку коробки, это увеличит срок её службы.
Кто-то слышал негативные отзывы от друзей и знакомых и не хочет покупать, кто-то пробовал ездить на старых моделях роботизированной коробки передач.
Но с развитием технологий, когда АМТ постепенно замещает и механику, и автомат, коробка-робот может стать самым лучшим и экономичным вариантом для автомобиля.
Обслуживание трансмиссия 5 АМТ
Согласно данным производителя, трансмиссия 5 АМТ не нуждается в обслуживании, её элементы защищены от воздействия пыли и влаги, что в свою очередь закрепило за коробкойрепутацию простого, надёжного, безотказного механизма.
Тем не менее, рекомендуется придерживаться правил:
- Следить за уровнем масла, в результате механических повреждений коробки возможна его утечка;
- Вовремя проводить адаптацию сцепления роботизированной коробки.
Коробка представляет собой набор шестеренок, управление которыми осуществляет актуатор ZF. Сцепление коробки со временем изнашивается и его необходимо подстраивать под актуатор, этот процесс и называется адаптацией, он предназначен для устранения рывков и толчков при движении.
Адаптация проводится:
- Каждые 15000 км пробега автомобиля;
- В случае замены сцепления;
- При обновлении настроек бортового компьютера.
Процесс прост и занимает несколько минут: через специальный диагностический разъём автомобиль соединяется с компьютером «АвтоВАЗ», электрик включает программу и в прямом режиме связывается с сервером производителя. Данные сбрасываются на сервер, после чего заводится двигатель и в течение нескольких секунд происходит адаптация.
Диагностику коробки желательно проводить у официального представителя, поскольку для выполнения работ потребуется специальное оборудование и обученный персонал.
Напомним, что на сегодняшний день в автомобилях и внедорожных машинах применяются коробки передач (КП) трех основных типов – механические, автоматические и роботизированные. Известны еще бесступенчатые коробки передач (вариаторы), но их применение весьма ограничено, а мы сегодня поговорим о преимуществах и недостатках автоматических и роботизированных КП.
Коробка-робот на автомобиле «Лада»
Рассмотрим легендарный автомобиль отечественного производителя с роботизированной трансмиссией. Попробуем разобраться в преимуществах и недостатках, учитывая отзывы. «Лада-Веста», робот-коробка которой нравится не всем потребителям, получила распространение на рынке. Все пишут, что к ней придется долго привыкать, однако это вовсе не проблема.
Встречаются в Сети в большом количестве хорошие отзывы. Они позволяют понять, что основная проблема такой коробки заключается лишь в слишком маленькой (в сравнении с АКПП) скорости переключения. Довольно часто водители не используют ручной режим, как правило, этого не требует ситуация. Зачастую острая необходимость появляется только при движении в большом потоке автомобилей. А как известно, коробка передач не подстраивается под особый стиль вождения самого водителя, поэтому безопаснее и выгоднее использовать ручной режим.
Некоторым потребителям вообще не нравится перспектива самостоятельного управления, ведь трансмиссия же отдана компьютеру, и он всегда должен ею руководить без вмешательства человека.
Также из преимуществ потребители отмечают то, что коробка-робот не сильно нагружает силовой агрегат, поэтому ездить максимально удобно и комфортно. Процесс переключения передачи после осуществления разгона происходит довольно быстро. Однако все же работа с одним сцеплением – практически прошлый век. Это сильно тормозит развитие таких коробок передач, ведь модели первого поколения получают много негатива в свой адрес, а это снижает популярность самого устройства.
В целом «Лада-Веста» считается нормальным недорогим вариантом. Приобретают его, как правило, те, кто только учится водить, более продвинутые люди на нее внимания не обращают.
Как выполнить остановку?
Для водителей также важен вопрос, который касается остановки и парковки. Очень важно знать, как правильно ездить, чтобы автомобиль исправно служил на протяжении долгого времени. После того, как машина полностью остановится, нужно перевести селекторный рычаг в режим «N», поставить на стоячий тормоз, заглушить двигатель.
Во время непродолжительных остановок перевод рычага в указанный режим не является обязательным. Допускается оставаться на режиме «А», однако при этом нельзя забывать, что во время остановки сцепление остается выжатым. А потому, при стоянии на светофоре или в автомобильном заторе, если выстаивание растягивается на неопределенный срок, нужно переключаться на нейтральный режим.
Коробка-робот на «Тойоте-Королла»
Учитывая, что каждый человек имеет собственные предпочтения в подборе машины и ее трансмиссии, водитель сам решит, подходит ли ему данная «Тойота». Коробка-робот, отзывы о которой хорошие в 80 % случаев, показывает нормальную работу. Однако все же имеет некоторые минусы.
Перед тем как приобрести машину, многие задумываются о том, какая же трансмиссия будет лучше? Для этого рассмотрим преимущества и недостатки. Делать это будем, принимая во внимание отзывы коробке-робот.
«Королле» с таким оснащением посвящены хвалебные оды водителей. В них говорится о том, что при работе тратится небольшое количество топлива. Более того, ее проще обслуживать и намного дешевле. Но имеются еще и недостатки. Какие же? Автомат переключает передачи несколько быстрее, чем «робот». Иногда подводит плавность работы, что влияет на динамичность езды и комфорт в целом. А также перед тем, как куда-либо ехать зимой, всегда придется прогревать автомобиль. Иначе имеется высокая вероятность того, что трансмиссия будет работать со сбоями.
Не все водители восторженно принимают тот факт, что установлена коробка-робот на «Тойота-Королла». Отзывы большинства потребителей дают понять – машиной управлять легко и проблемы возникают редко. Но опять-таки, необходимо понимать специфику работы такой трансмиссии и быть готовым перестраиваться под нее.
Устройство и принцип работы роботизированной коробки передач с одним сцеплением
Содержание
- Что такое роботизированная КПП
- Устройство и принцип работы роботизированной коробки передач с одним сцеплением
- Преимущества и недостатки роботизированной автоматической коробки передач по сравнению с другими типами коробок передач
- Робот и автомат
- Робот и МКПП
- Подводя итог
Роботизированная коробка передач с одним сцеплением представляет собой гибрид автоматической коробки передач и механической коробки передач. То есть в основе робота лежит обычная МКПП, но управляется он автоматически, без участия водителя. Для того, чтобы понять, действительно ли робот сочетает в себе достоинства автомата и механики, давайте познакомимся с его устройством и принципом работы. Выявим преимущества и недостатки коробки, а также ее отличия от других типов коробок передач.
Что такое роботизированная КПП
Так робот это больше автоматическая или механическая коробка передач? Часто его приравнивают к модифицированному пулемету. Фактически в основе робота лежит механическая трансмиссия, завоевавшая это право своей простотой и надежностью. По сути, роботизированная коробка передач — это та же механика с дополнительными устройствами, отвечающими за переключение передач и управление сцеплением. Те. водитель освобождается от этих обязанностей.
Роботизированная коробка встречается как в легковых, так и в грузовых автомобилях, а также автобусах, а в 2007 году робот был даже представлен на спортивном мотоцикле.
Практически у каждого автопроизводителя есть свои разработки в области роботизированных коробок передач. Here is a list of them:
| Manufacturer | Name | Manufacturer | Name |
|---|---|---|---|
| Renault | Quickshift | Toyota | MultiMode |
| Peugeot | 2-Tronic | Honda | i-Shift |
| Mitsubishi | Allshift | Audi | R Tronic |
| Opel | Easytronic | BMW | SMG |
| Ford | Durashift/Powershift | Volkswagen | DSG |
| Fiat | dual logic | Volvo | Powershift |
| Alfa Romeo | Selespeed |
Устройство и принцип работы роботизированной коробки передач с одним сцеплением
Роботизированная коробка передач может быть с одним или двумя сцеплениями. О роботе с двумя сцеплениями см. статью Powershift. Мы продолжим разговор о коробке передач с одним сцеплением.
Устройство робота достаточно простое и включает в себя следующие элементы:
- механическая часть;
- сцепление;
- диски;
- система управления.
Механическая часть содержит все узлы обычной механики, а принцип работы роботизированной АКПП аналогичен принципу работы МКПП.
Приводы, управляющие коробкой, могут быть гидравлическими и электрическими. При этом один из приводов следит за сцеплением, он отвечает за его включение и выключение. Второй управляет механизмом переключения передач. Практика показала, что коробка передач с гидроприводом работает лучше. Как правило, такая коробка используется на более дорогих автомобилях.
Роботизированная коробка передач также имеет режим ручного переключения передач. В этом его уникальность — переключать передачи может как робот, так и человек.
Система управления электронная и включает в себя следующие части:
- входные датчики;
- электронный блок управления;
- исполнительные устройства (исполнительные механизмы).
Входные датчики контролируют основные параметры работы коробки передач. К ним относятся число оборотов в минуту, положение вилки и селектора, уровень давления и температура масла. Все данные передаются в блок управления, который управляет исполнительными механизмами. Исполнительный механизм, в свою очередь, управляет работой сцепления с помощью сервоприводов.
В роботизированной АКПП гидравлического типа система управления дополнительно снабжена гидроблоком управления. Он управляет работой гидроцилиндров.
Принцип работы робота осуществляется двумя способами: автоматическим и полуавтоматическим. В первом случае управление коробкой осуществляется по определенному алгоритму, который задается блоком управления на основе сигналов датчиков. Во втором принцип работы идентичен ручному переключению передач. Передачи с помощью рычага селектора последовательно переключаются с высокой на низкую и наоборот.
Изначально коробка-робот создавалась для того, чтобы совместить все преимущества АКПП и МКПП. В первую очередь это комфорт АКПП и надежность при экономичности механики. Для того, чтобы определить, удалась ли задумка разработчиков, сравним основные параметры робота с автоматической коробкой передач и робота с механической коробкой передач.
Робот и автомат
Приведем сравнительные характеристики двух коробок передач в виде таблицы. Возьмем ряд параметров за основу для сравнения.
| Параметр | Робот | Автоматический |
|---|---|---|
| Дизайн устройства | и ремонт | .0045 Oil and fuel consumption | Less | Больше |
| Vehicle acceleration dynamics | Better | Worse |
| Carton weight | Less | Больше |
| Performance | Above | Below |
| Поведение машины при переключении передач | Рывки, «эффект задумчивости» | Плавное движение без рывков |
| Возможность отката автомобиля на склоне | There is | No |
| Engine and clutch resource | Less | Больше |
| Driving | More difficult | Easier |
| The need to shift the lever to neutral when stopping | Yes | № |
Итак, что мы имеем: роботизированная коробка передач экономичнее по всем параметрам, но по комфорту для водителя автомат все же выигрывает. Таким образом, робот не перенял главное преимущество автоматической коробки передач (комфортность вождения), по крайней мере рассматриваемую нами трансмиссию с одним сцеплением.
Посмотрим, как поживает механика и перенял ли робот все свои преимущества.
Робот и МКПП
Теперь сравним робота с МКПП.
| Parameter | Robot | MKPP |
|---|---|---|
| Box cost and maintenance | Expensive | Cheaper |
| Jerks when shifting gears | Less | Больше |
| Fuel consumption | A little less | A little more |
| Clutch life (depends on the specific model) | Больше | Less |
| Reliability | Less | Больше |
| Comfort | Больше | Меньше |
| Дизайн | Сложнее | Легче |
Какой здесь можно сделать вывод? Робот комфортнее механики, чуть экономичнее, но стоимость самой коробки будет дороже. МКПП по-прежнему остается надежнее робота. Конечно, здесь автомат уступает роботу, но, с другой стороны, пока неизвестно, как поведет себя роботизированная трансмиссия в сложных дорожных условиях — чего нельзя сказать о механике.
Подводя итоги
Роботизированная коробка передач, несомненно, претендует на звание одного из лучших типов трансмиссий. Комфорт, экономичность и надежность – три основных показателя, которыми должна обладать любая коробка передач. Идея объединения всех этих характеристик в одной коробке позволит водителю наслаждаться комфортной ездой и не беспокоиться о том, что автомобиль подведет в непредсказуемых ситуациях. Для этого необходимо работать над совершенствованием роботизированной трансмиссии, так как на данный момент она еще далека от совершенства.
Главная » Трансмиссия автомобиля » Устройство и принцип работы роботизированной коробки передач с одним сцеплением
Роботизированная коробка передач. Как ездить на роботизированной коробке передач
Любой автолюбитель, сделавший выбор в пользу автомобиля с роботизированной коробкой передач, практически сразу задается вопросом: как управлять роботизированной коробкой передач?
Следует понимать, что роботизированная коробка передач — это, по большому счету, классическая механическая коробка передач, в состав которой входит небольшой электрический блок, управляющий переключением передач и сцеплением.
Такие роботизированные коробки имеют ряд замечательных преимуществ: они надежны, удобны и просты в эксплуатации, а также отличаются малым расходом топлива.
Сегодня почти каждый производитель автомобилей имеет в модельном ряду виды, оснащенные роботизированными коробками передач. При этом любой производитель использует свою уникальную технологию и особое имя.
Итак, чтобы разобраться, как правильно управлять «роботом», и как управляется роботизированная коробка, рассмотрим его подробнее.
Следует понимать, что «робот» — это ветвь в истории эволюции механических коробок передач. Специалисты также называют роботизированные коробки передач гибридом механической коробки передач и автоматической. В связи с тем, что роботизированный механизм, автоматизированный электрическим блоком, стал управляться сервоприводами, некоторые характеристики таких редукторов повысились.
Есть роботизированное управление с ручным режимом. Некоторые типы «роботов» вообще допускают работу в 3 разных режимах: автоматическом, полумеханическом, ручном. В первом случае водителю не нужно вмешиваться в процесс переключения передач. Во втором случае водитель сможет самостоятельно управлять сцеплением. В третьем случае все управление ложится на плечи водителя.
Если вы любите быструю езду и являетесь ярым поклонником драйва, то идеальным вариантом станет выбор «кулачковой» роботизированной коробки передач, так как она является самой быстрой из всех остальных «роботов». Скорость переключения одной передачи составляет около 0,1-0,15 сек. Автомобили с этим типом коробки передач оснащены педалью сцепления, хотя ее использование требуется только для того, чтобы тронуться с места. Далее процесс переключения аналогичен процессу переключения в гоночном мото, то есть без использования сцепления.
Роботизированные коробки оснащены электрическими или гидравлическими муфтами. Для первых в качестве составных элементов выступают электродвигатели или сервомеханизмы. Во втором случае элементами являются гидроцилиндры.
Приводами гидроцилиндров оснащены следующие марки автомобилей: Peugeot, Fiat, Renault, BMW, Volkswagen, Citroen и многие другие марки. На базе электропривода типичными представителями являются: Nissan, Opel, Mitsubishi и другие.
Для полного понимания вопроса о том, как ездить на программах роботизированной коробки, вам потребуется осветить ряд вопросов.
Прогрев роботизированной коробки передач и особенности работы
Многих владельцев данного типа коробок передач, или тех, кто недавно впервые с ними столкнулся, интересует вопрос: нужен ли предварительный прогрев роботизированной коробки передач в условиях низких или экстремально низких температур?
Хотя по заверениям конструкторов и с чисто эксплуатационной точки зрения прогрев данного типа коробки передач не нужен, однако стоит учитывать важный момент- температура масла и как оно ведет себя при низкие температуры. Ведь некоторые виды масел при низких температурах начинают густеть и накапливаться в нижней части коробки передач.
Стандартная процедура прогрева заключается в том, чтобы оставить автомобиль включенным на несколько минут и не трогать рычаг селектора на время прогрева. Трогаться при этом лучше плавно и спокойно, избегая рывков и рывков. Следите за оборотами: их уровень должен быть минимум в районе одного километра.
В любом случае подобную процедуру можно и даже рекомендуется проводить в летнее время, что позволит всем элементам трансмиссии и коробки передач получить достаточное количество жидкой смазки.
Такие меры перед непосредственным началом движения сыграют весьма положительную роль в сроке службы любого автомобиля и предотвратят истирание и износ отдельных элементов.
Во избежание преждевременного выхода из строя как составных частей коробок передач, так и трансмиссии в целом, рекомендуется соблюдать ряд особых правил:
- Категорически не рекомендуется скользить при низких температурах. В таких условиях буксы становятся губительными для работоспособности системы в целом и могут привести к раскалибровке.
- Также важно избегать заснеженных участков дороги, так как есть определенная вероятность просто застрять, что приведет к нежелательному проскальзыванию.
- Лучше не покупать «липучку», а сразу выбрать резину с шипами.
- В моменты длительного простоя или когда машина просто «ночует» во дворе вашего дома, лучше оставить ее на передаче со значением «Е». Конечно, при условии, что двигатель выключен.
- В случае, когда дорожное покрытие ненадлежащего качества, рекомендуется трогаться без ускорения со второй передачи.
Начинаем правильно: переезжаем на горку, преодолеваем ее и спускаемся
Всем, кто выбрал роботизированную коробку передач, или тем, кто только собирается это сделать, следует учесть одну важную деталь: часть автомобилей, содержащих он в составе своей трансмиссии часто не оснащен дополнительной функцией помощи при трогании с места на возвышении. Именно поэтому крайне важно научиться самостоятельно передвигаться при движении по наклонной дороге.
Поведение водителя в этой ситуации должно быть похоже на поведение при использовании механической коробки передач, так будет проще тем, кто пересел на «роботов» с «механики». Опишем процесс более подробно: переведите селектор в положение «А», затем плавно и равномерно нажмите на акселератор; при этом медленно снимаем автомобиль с ручника.
Если условия, в которых осуществляется подъем на горку, характеризуются низкими температурами и повышенной влажностью, то вам может понадобиться ручное управление или режим «М1». Важно помнить, чтобы давление на газ было максимально возможным, такая мера предотвратит образование пробуксовочной ситуации.
При наличии в машине гироскопа, при выборе авторежима роботизированная коробка самостоятельно начнет выбирать нужные передачи и, соответственно, переключать их. При условии такого движения переключение будет осуществляться в основном вниз. Опытные водители в зависимости от ситуации могут выбрать функцию «М» при фиксации текущей скорости. В случае, когда водитель решил самостоятельно выбрать скоростной режим, ему рекомендуется выбрать его и соблюдать скорость в диапазоне 2500-5000, не ниже и не выше. Это табу!
Что касается движения под уклон, то тут особо ничего не сделать, кроме как перевести рычаг селектора в положение «А» и выключить ручной тормоз.
Эксплуатация роботизированной коробки передач в городских условиях
Среди специалистов и заядлых автолюбителей распространено мнение, что городские условия вкупе с пробками зачастую негативно сказываются на сроке службы роботизированной коробки передач. Чтобы избежать такого пагубного эффекта, при полной остановке автомобиля рекомендуется установить рычаг селектора в положение «N», затем включить ручной тормоз и заглушить двигатель. В случае, когда стопы носят краткосрочный характер, применение позиции «N» не требуется, можно оставаться в позиции «А».
Также следует учитывать, что в пробках продолжительностью более минуты двигатель, скорее всего, потребуется заглушить.
В общем и целом
Итак, тонкости и нюансы управления роботизированной коробкой передач мы рассмотрели, осталось усвоить несколько полезных правил, которые будут особенно полезны для начинающих и неопытных водителей, в частности для тех, кто сталкивается с роботизированная коробка передач на первое время:
- При трогании не стоит давить на газ до упора, если хотите набрать скорость, то глушить надо уверенно, но в то же время равномерно, плавно.
- Во избежание рывков и рывков, характерных для роботизированной коробки передач, специалисты и просто заядлые автовладельцы с «роботами» рекомендуют регулярно проводить процесс инициализации в специальных сервисных центрах.
- При наборе скорости и особенно интенсивном разгоне рекомендуется применять навыки работы с МКПП (конечно, при условии, что вы ранее ездили на ней самостоятельно).
Также следует помнить и учитывать, что помимо рассмотренных нами есть еще несколько дополнительных положений.
Некоторые роботизированные коробки имеют режимы типа «зима» или «спорт». Первый режим устроен таким образом, что дает плавность и управляемость при движении по зимней дороге. Второй позволяет переключаться на повышенную передачу при условии высоких оборотов, что делает возможным быстрый разгон.
Заключение
Итак, прежде чем выбрать роботизированную коробку передач в качестве основы для трансмиссии своего будущего автомобиля, внимательно ознакомьтесь с особенностями и тонкостями работы и вождения на ней, чтобы избежать большинства ошибок, допускаемых новичками, а также сохранить все его элементы в целости и сохранности на долгие годы. … Удачи на дороге!
Автомобилисты, решившие приобрести автомобиль с роботизированной коробкой передач, часто задаются вопросом, как ездить с такой системой? В этой статье мы рассмотрим, как пользоваться коробкой-роботом. Автоматическая роботизированная коробка передач, общее название коробки робот – это обычная механическая коробка передач, в которой заключен компактный электронный блок, электронное управление сцеплением и автоматизированное переключение передач. Коробка-робот сочетает в себе надежность, комфорт и топливную экономичность. Сегодня почти все автопроизводители оснащают свои автомобили такими коробками, каждая из которых имеет свой уникальный дизайн и запатентованное название. Что самое интересное, «робот» дешевле классической АКПП.
Роботизированная трансмиссия
Одна из ветвей развития механических трансмиссий привела к созданию роботизированной коробки передач, совместившей надежность «механики» с удобством «автомата». За счет того, что всю работу водителя стали выполнять исполнительные механизмы — сервоприводы агрегата, характеристики возросли. Теперь электронный блок сам заботится о переключении передач. Все, что нужно от человека, это установить селектор в нужное положение, как на КПП и наслаждаться ездой.
Имеются роботы с режимом ручного переключения передач. Например, коробка 2-Tronic может работать в трех режимах. Первый – автомат, когда человек вообще не трогает шестерню. Второй – полумеханический, на случай, если водитель захочет самостоятельно управлять сцеплением, например, при обгоне другого автомобиля и при этом находится в автоматическом режиме. Третий режим полностью ручной, где все зависит только от водителя.
Что касается любителей быстрой езды, то им как раз подойдет кулачковая роботизированная коробка передач. Это самая быстрая из всех видов роботизированных коробок, переключать скорости можно за 0,15 секунды. Автомобили с такой коробкой содержат педаль сцепления, но она используется только тогда, когда транспортное средство трогается с места. Далее переключение происходит как в спортбайке — без использования сцепления.
Коробка передач преселективная
РКПП может иметь электрический или гидравлический привод сцепления. В первом варианте «органами» являются сервомеханизмы (электродвигатели). Что касается гидравлики, то здесь все основано на гидроцилиндрах. Такие автопроизводители, как Peugeot, Fiat, Renault, BMW, Volkswagen, Citroen и другие, оснащают свои роботизированные коробки гидравлическим приводом. Что касается электропривода, то с ним работают компании: Ford, Opel, Nissan, Toyota, Mitsubishi. Другие компании корейских производителей пока не решаются внедрять роботов из-за сложности конструкции и обслуживания.
Принцип работы роботизированной коробки передач
РКПП имеет тот же принцип работы, что и механическая трансмиссия. У нее те же три вала: ведомый, промежуточный и ведущий, те же шестерни и передаточные числа. Как было сказано выше , роботы управляются сервоприводами, иначе как исполнительными механизмами. Эти устройства входят и разъединяют шестерни валов, а также соединяют и разъединяют коробку с маховиком двигателя. Управление процессом взял на себя электронный блок, который подает команды на гидропривод или электродвигатель. На основании сигналов от входных датчиков блок формирует алгоритм управления, зависящий от внешних условий, и реализует его через исполнительные устройства. Водителю остается только переключать ее подрулевым селектором передач.
Коробка автомат с гидротрансформатором
Роботизированные коробки передач с двойным сцеплением
Так как в первых коробках роботов время переключения сцепления медленное (до 2 с), что приводит к зависаниям и рывкам в динамике, было решено устранить проблему, создав роботизированную коробку передач с двойным сцеплением, которая переводит скорости, не прерывая поток мощности. Технология зародилась в конце 80-х годов прошлого века. Суть в том, что два сцепления работают попеременно, а не оба сразу. Вместе с двойным сцеплением коробки преселекции содержат еще два первичных вала.
Алгоритм следующий — пока активна первая передача, стартовый сигнал идет на вторую. Таким образом, крутящий момент передается сначала на приводной вал, а следующий ожидает своей очереди, будучи уже включенным через второй входной вал, но еще отсоединенным от приводного вала. Таким образом, время переключения сокращается до минимума, чего нельзя сделать на МКПП с ручным управлением. Благодаря устройству работы двух сцеплений ход автомобиля плавный и мягкий, однако по конструкции такое устройство достаточно сложное и его обслуживание может быть дорогим. Такое техническое решение можно наблюдать на коробках DSG, S-Tronic, SMG и DCT M Drivelogic, которые обычно стоят в спортивных автомобилях BMW.
Вам нужно прогреть бокс?
Перейдем к рассмотрению вопроса, как ездить на роботе с точки зрения эксплуатации. Многих волнует вопрос, требуется ли прогревать МКПП зимой? На самом деле робота не нужно прогревать, но что ж, думаем, лишним не будет. Потому что при застое масло в коробке стекает и под воздействием мороза густеет. Чтобы прогреть его для нормальной работы, нужно просто постоять несколько минут при работающем двигателе, при этом селектор переводить не нужно. Затем нужно тронуться с места плавно, двигаясь ровно без рывков с минимальными оборотами, надо проехать около километра.
Летом достаточно одной минуты, чтобы масло распространилось по системе. Если не прогревать машину, масло может плохо смазывать подшипник, а это вызовет неполное сплющивание диска, корзины и трения с последующим перегревом.
Несколько полезных советов:
Начало движения в гору, его преодоление, спуск
Некоторые автомобили с МКПП не оборудованы функцией помощи при старте на подъёмнике, по этой причине нужно самому научиться правильно двигаться в таких ситуациях. С коробкой роботу нужно вести себя так же, как и с МКПП. Ставим селектор в режим «А» и медленно нажимаем на акселератор, попутно снимая автомобиль со стояночного тормоза. Это поможет предотвратить скатывание автомобиля назад. Перед этим желательно потренироваться, чтобы почувствовать и понять, в какой момент сцепление начало включаться и его можно снимать с ручника.
Если вам нужно подняться в гору зимой, то лучше перейти на ручное управление, установив первую передачу или режим «М1». Помните, что давление газа должно быть максимальным, это не вызовет буксования. При наличии в машине гироскопа автоматический режим берется на подъеме, коробка начнет сама переключаться на нужные передачи. Робот сам определяет положение и начинает переключать скорости — в основном на пониженные. В зависимости от ситуации можно переключить рычаг в режим «М» и зафиксировать текущую скорость. Когда скорость вас не устраивает, вы можете выбрать нужную, при этом не стоит снижать обороты ниже 2500 и превышать 5000. Во время спуска ничего делать не нужно, достаточно будет просто поставить селектор в режим «А» и снимите его с ручного тормоза.
Схема МКПП
Городские условия/остановка, парковка
Есть мнения, что робот-коробка хуже уживается в городе с пробками, и это снижает срок ее службы. Совет: после полной остановки автомобиля селектор необходимо установить в нейтральное положение «N», поставить на ручник и затем заглушить двигатель. Если стопы короткие, то переводить селектор в нейтральный режим не нужно, вы находитесь в положении «А». Так как сцепление остается выжатым при остановке, в пробке или на светофоре с задержкой более минуты лучше заглушить двигатель.
Другие режимы
Имеются дополнительные приложения систем, помимо рассмотренных основных. Так, некоторые роботизированные боксы оснащены позицией — спорт и зима, другое название «снежинка». Режим «Снежинка» нужен для создания плавности хода на скользкой дороге. Он обеспечивает движение, плавно переходя со второй передачи на повышенную скорость.
Положение «спорт» обеспечивает переключение на более высокие передачи при высоких оборотах, что обеспечивает быстрое ускорение.
Машина с коробкой роботом
Как правильно управлять роботизированной коробкой передач мы рассмотрели, теперь дадим несколько практических советов:
- На старте не стоит выжимать газ, когда это необходимо для увеличения скорости педаль нужно нажимать уверенно, но плавно.
- Инициализировать лучше в сервисном центре несколько раз в год — это минимизирует дергания и рывки.
- Во время разгона следовать логике МКПП.
Что такое роботизированный контрольно-пропускной пункт? Роботизированная трансмиссия (другое название — автоматизированная трансмиссия , обиходное название — робот-коробка ) — механическая трансмиссия, в которой автоматизированы функции выключения сцепления и переключения передач. Автоматизация этих функций стала возможной благодаря использованию электронных компонентов в управлении коробкой.
Роботизированная коробка передач сочетает в себе комфорт, надежность и топливную экономичность механической коробки передач. При этом «робот» по большей части намного дешевле классической АКПП.
В настоящее время практически все ведущие производители автомобилей оснащают свои автомобили роботизированными коробками передач. Все коробки имеют собственные фирменные названия и различаются по дизайну.
При этом можно выделить следующие общие. Устройство роботизированной коробки передач :
- сцепление;
- Механическая коробка передач;
- сцепление и шестерня привода; Система управления
- .
Ящики для роботов могут иметь электрическое или гидравлическое сцепление и зубчатую передачу … В исполнительными органами электропривода являются сервомеханизмы (электродвигатели). Гидравлический привод осуществляется с помощью гидроцилиндров. В зависимости от типа привода роботизированные коробки передач имеют устоявшиеся названия:
- собственно роботизированные коробки передач ( электропривод) ;
- секвентальные коробки передач ( гидравлический привод ).
Название «секвентальная» коробка произошло от sevensum — sequence, означающее последовательное переключение передач в ручном режиме.
Во многих источниках информации коробки передач имеют одно общее название — роботизированные.
Муфты и шестерни электропривода имеют следующие конструкции коробок передач:
- Easytronic от Opel;
- Многорежимный от Toyota.
Значительно больше конструкций «роботов» имеют гидравлический привод :
- SMG , DCT M Drivelogic от BMW;
- DSG от Volkswagen;
- S-Tronic от Audi;
- Senso Drive от Citroen;
- 2-Tronic от Peugeot;
- Dualogic от Fiat.
Система управления роботизированной коробкой передач включает в себя следующие конструктивные элементы:
- входные датчики; электронный блок управления
- ; Актуаторы коробки передач
- .
В роботизированных боксах с гидроприводом в систему управления также входят гидравлический блок управления , который обеспечивает прямое управление гидроцилиндрами и давлением в системе.
Принцип работы роботизированной коробки передач заключается в следующем: на основе сигналов входных датчиков электронный блок управления формирует алгоритм управления коробкой в зависимости от внешних условий и реализует его через исполнительные механизмы. По команде электронного блока управления гидроцилиндры (или электродвигатели) в нужный момент размыкают и замыкают сцепление, а также включают подходящую передачу. С помощью селектора водитель лишь устанавливает нужный режим работы робота: например, вперед или назад.
На всех роботизированных коробках предусмотрен режим ручного переключения передач, аналог. Например, коробка 2-Tronic способна работать в трех режимах. Первый полностью автоматический. В этом случае водитель может вообще не думать о переключении передач и ехать как на обычном «автомате». Второй – так называемый полумеханический, который включается, если водитель решает сам переключить передачу с помощью подрулевых лепестков, не выходя из автоматического режима. Такая ситуация возникает, например, при обгоне, когда необходимо срочно переключиться «вниз». Если же резкого разгона не произошло или после возврата в обычный режим движения, через некоторое время коробка вернется в автоматический режим. Третий вариант КПП полностью ручной. Выбор передачи лежит только на водителе, однако и здесь не все в его силах — при достижении максимальной скорости компьютер даст команду на переход на следующую ступень.
Основным недостатком первых роботизированных коробок передач было большое время переключения передач (до 2 с), что приводило к провалам и рывкам в динамике автомобиля и снижало комфорт управления транспортным средством… Решение этой проблемы заключалась в использовании коробки передач с двумя сцеплениями, что обеспечивало переключение передач без прерывания потока мощности.
Весь алгоритм работы коробки с двумя сцеплениями сводится к тому, что пока работает первая передача, вторая уже ждет включения второй передачи, и как только блок управления подает сигнал по команде активируются второе сцепление, внешний входной вал и вторая передача. Дальше по накатанной ждет сигнала третья передача и т.д. Время переключения сведено к минимуму, даже водитель не может так быстро переключать МКПП.
Данное техническое решение реализовано в коробках передач DSG, S-Tronic (время переключения 0,2-0,4 с), а также коробках передач SMG и DCT M Drivelogic (время переключения 0,1 с), устанавливаемых на спортивные автомобили BMW.
В настоящее время наиболее распространенными и технически совершенными являются роботизированные коробки передач DSG и S-Tronic. Коробка S-Tronic аналогична коробкам DSG, но в отличие от нее устанавливается на задне- и полноприводные автомобили… www.systemsauto.ru
На современных автомобилях используется несколько типов коробок передач — механическая, автоматическая, вариаторная. МКПП отличается надежностью, но требует от водителя навыков вождения. Автомат гораздо проще в управлении, но более «капризен» в техническом плане. Недавно конструкторы выпустили еще один тип коробки передач – роботизированный. В ней постарались совместить надежность «механики» с удобством «автомата». И у них это получилось — все больше автопроизводителей оснащают свои автомобили роботизированной коробкой передач.
Немного об устройстве
Суть такой коробки довольно проста — есть механическая коробка передач и ее электронный блок управления. В МКПП все функции, которые водитель должен был выполнять с механической коробкой (выжимание сцепления, перевод рычага КПП в нужное положение) выполняют исполнительные механизмы – сервоприводы электронного блока.
Благодаря этому повысилась надежность коробки передач за счет использования классической «механики» и повысилось удобство ее использования. Водителю достаточно перевести селектор в нужное положение (как в АКПП) и наслаждаться ездой, а за переключение передач позаботится электронный блок.
При всем при этом многие роботизированные коробки оснащены еще и ручным управлением, что позволяет водителю управлять коробкой самостоятельно, с той лишь разницей — нет необходимости выжимать сцепление.
Особенности управления
МКПП получила некоторые режимы работы от, а именно:
- «N» нейтраль. Режим, при котором крутящий момент не передается на колеса от коробки передач. То есть двигатель работает, вращение передается на коробку, но из-за положения шестерен не передается на колеса. Применяется при длительной стоянке автомобиля, перед началом движения, после остановки;
- «R» — движение задним ходом . Здесь все просто, водитель переводит селектор в это положение и машина движется назад.
Другие режимы роботизированной коробки имеют свое обозначение:
- «А/М» или «Е/М» — движение вперед. Этот режим соответствует режиму «D» автоматической коробки, то есть автомобиль движется вперед, а коробка передач переключает передачи. В режиме «М» осуществляется ручное управление. Перемещением селектора в определенный слот выбирается необходимый режим;
- «+», «-» — селектор передач. Кратковременные переводы селектора в сторону «+» или «-» обеспечивают переключение передач в режиме ручного управления «М».
Вам нужно прогреть бокс?
Вроде бы все просто, и в управлении таким ящиком нет ничего сложного — достаточно перевести селектор в нужное положение и начать движение. И еще, вы должны знать, как управлять коробкой-роботом, чтобы она работала без проблем.
Начнем с интересного вопроса — нужно ли зимой прогревать КПП перед поездкой? Для АКПП в зимний период прогрев обязателен и осуществляется кратковременным переводом селектора во все положения.
Роботизированная коробка, по сути, механическая и не требует прогрева. И все же зимой перед началом движения МКПП надо прогревать, хотя это не совсем прогрев. При стоянке масло в коробке стекает и густеет из-за мороза. Поэтому рекомендуется зимой после запуска двигателя давать время, чтобы масло скорее не прогревалось, а просто растекалось по элементам коробки, уменьшая трение между ними. Достаточно просто постоять пару минут с работающим двигателем, при этом селектор не нужно переключать в разные режимы, достаточно держать его в положении «N». После этого необходимо начать движение плавно, без резких рывков и проехать не менее 1 км, чтобы масло полностью прогрелось.
Начало движения в гору, его преодоление, спуск
Многие автомобили с МКПП не оснащены системой помощи при старте в гору, поэтому самому водителю необходимо научиться правильно начинать движение. При начале лазания с роботизированной коробкой необходимо поступить так же, как и с «механикой». Для начала движения селектор переводится в режим «А», плавно нажимается акселератор и одновременно автомобиль снимается со стояночного тормоза. Это действие предотвратит скатывание автомобиля назад. Одновременно давить на газ и снимать с ручника, следует потренироваться, чтобы водитель чувствовал работу двигателя и понимал, когда сцепление начинает включаться и его можно снимать с ручника.
При начале движения в гору зимой лучше использовать ручной режим, выставив первую передачу. Не нужно сильно разгоняться, чтобы не было пробуксовки колес.
При движении в гору с выбранным автоматическим режимом коробка автоматически начнет переключаться на пониженные передачи, что вполне логично, ведь на повышенных оборотах легче преодолевать подъем. Такая коробка передач оснащена гироскопом, определяющим положение автомобиля, и если датчик указывает на подъем, то коробка передач будет работать соответственно. Также можно передвигаться в ручном режиме, зафиксировав определенную передачу. Важно понимать, что МКПП не даст двигаться в тесноте, поэтому при подъеме обороты двигателя должны быть не менее 2500 об/мин.
При спуске от водителя не требуется никаких действий. Достаточно перевести селектор в положение «А» и снять ручник. В этом случае автомобиль будет осуществлять торможение двигателем.
Остановка, парковка
И третий важный вопрос — правильность парковки и остановки. После полной остановки автомобиля селектор необходимо перевести в нейтральное положение «N», поставить на ручник и затем заглушить двигатель. При коротких остановках перевод селектора в нейтраль не нужен, вполне можно оставаться в режиме «А». Но следует учитывать, что при остановке сцепление остается выжатым. Поэтому в пробке или на светофоре, когда остановка задерживается, все равно следует переходить на нейтраль.
Другие режимы
Это основные правила работы с роботизированной коробкой. Но есть и другие особенности, например, некоторые МКПП имеют дополненные режимы — спорт и зима, так называемая «снежинка».
«Снежинка» направлен на то, чтобы начать движение по обледенелой дороге максимально плавно и без пробуксовок. Все, что он делает, это гарантирует, что движение начинается сразу со второй передачи и более плавно переключается на более высокую передачу.
В спортивном режиме происходит переключение на более высокую передачу при более высоких оборотах, чем в обычном режиме. Это позволяет быстрее разгоняться. То есть, если в обычном режиме переход на 2-ю передачу производился, например, при 2500 об/мин, то в режиме «спорт» этот переход будет осуществляться при 3000 об/мин.
Теперь о возможности переключения с автоматического режима на ручной и обратно во время движения. Роботизированная коробка позволяет сделать это без особых проблем. Также допускается самостоятельное понижение или повышение передачи для изменения скорости движения. Но следует учитывать, что электронный блок не передаст полное управление коробкой, он будет постоянно следить за работой.
Поэтому, если водитель решит ехать, например, на две передачи вниз, то это сделает электронный блок, но при этом он будет контролировать обороты двигателя и если они не соответствуют выбранной передаче, электроника самостоятельно выполнит переход на допустимый перевод — сработает так называемая «защита от дурака».
Здесь все просто — электронный блок запрограммирован так, что каждой передаче соответствует определенный диапазон оборотов двигателя. И если выбранная вручную передача соответствует своему диапазону, то коробка переключится, а если нет, то включит нужную скорость.
Такая коробка «не терпит» резких нажатий на педаль газа, поэтому лучше ездить в спокойном режиме. Даже если вам нужно ускориться, лучше нажимать на акселератор плавно, при этом стоит перейти в ручной режим. А при торможении должно быть наоборот — переходить в автоматический режим.
Особенностью МКПП является наличие небольших толчков при переключении передач. Избавиться от них можно достаточно просто – при переключении передач сбавьте обороты двигателя, то есть действуйте по аналогии с обычной механической коробкой передач.
Наличие ручного режима позволяет даже выполнить «раскачивающийся» выход на случай, если машина застрянет в сугробе. Но в то же время на пользу КПП это не пойдет, так как на ручной КПП проскальзывать не рекомендуется, это может привести к раскалибровке исполнительных механизмов. Поэтому вытащить застрявший автомобиль все же лучше с помощью посторонней помощи.
Обязательна инициализация и диагностика состояния МКПП на каждом ТО, что устранит все на ранней стадии.
Есть и другие мелкие особенности этих коробок, которые зависят от производителя. Их лучше сразу задавать, чтобы в дальнейшем не возникало недоразумений с работой роботизированной коробки.
Что такое роботизированная коробка передач и как она работает.
Что такое роботизированная коробка передач и как она работает Прогрев роботизированной коробки передач и особенности работы При ранее ограниченном выборе трансмиссий автолюбители при покупке автомобиля могли отдать предпочтение только механике или автомату. Сейчас активное развитие автомобилестроения привело к появлению новых трансмиссий, и выбор уже не так прост. Интересует коробка-робот и автомат: чем отличаются эти трансмиссии и как между ними выбирать?
В чем разница между роботом и машиной
Чтобы понять, чем АКПП отличается от робота, стоит разобраться в принципе работы каждой из указанных трансмиссий и устройстве системы в целом.
В основе автоматики лежит система управления, гидротрансформатор и сама коробка передач планетарного типа со специфическими шестернями и муфтами. Благодаря схожей конструкции скорости переключаются автономно без участия водителя. Ориентиром в данном случае являются такие параметры, как режим движения, нагрузка и обороты двигателя.
Читайте также очень познавательную статью нашего специалиста о .
Актуальность установки автомата наблюдается на грузовые и легковые автомобили, а также на автобусы. Если автомобиль переднеприводный, конструкция АКПП дополняется дифференциалом и .
Первое, что отличает робота от автомата, это особая конструкция, сочетающая в себе возможности механической и автоматической коробки передач. По сути, механика в данном случае дополняется автоматом с исполнительными механизмами, отвечающими за переключение передач и работу сцепления. Переключение происходит так же, как и в случае с механической трансмиссией, но водитель в этом не участвует.
Первоочередной целью создания роботизированной коробки передач было удешевление трансмиссии и одновременное слияние всех преимуществ механики и автомата. Речь идет о простоте использования и комфорте. В результате существует несколько вариантов конструкции системы.
- Примеры автомобилей Bmw серии M вы можете рассмотреть самую качественную и известную механическую коробку передач под названием Sequental M Gearbox (SMG). Коробка передач 6-ступенчатая, механическая, при этом за переключение передач и выключение сцепления отвечает гидравлика с электронным управлением. Передачи переключаются за 0,08 сек.
- Для примера Mercedes-Benz A-класса можно рассмотреть другой принцип, где на базе механики установлен электрогидравлический привод сцепления. Водитель участвует в переключении передач, но педалей всего две. Электропривод самостоятельно следит за положением рычага и педали газа, поэтому сцепление в этом случае отсутствует и выключается автоматически. Цифры на датчиках ABS и двигателя помогают электронике в расчетах, чтобы избежать рывков при переключении передач и резких остановок двигателя.
- Для примера автомобилей Ford и Opel можно рассмотреть третий принцип, где гидронасосы заменены шаговыми двигателями. Несмотря на бюджетность этого варианта, на практике он оказался не очень удачным, что отразилось на задержке в переключение передач и сильные рывки. Однако на Toyota Corolla устанавливается аналогичная трансмиссия, и упомянутые недостатки здесь отсутствуют.
Основные отличия АКПП от МКПП
Итак, коробка робот и автомат: в чем разница между этими двумя трансмиссиями?
- Первое отличие заключается в дизайне. В случае с роботом это механик с блоком управления; устройство автоматики совсем другое.
- Плавность и скорость переключения с автоматики лучше.
- Практически все АКПП лишены функции ручного переключения, в то время как у роботизированной трансмиссии эта функция есть.
- Еще одно отличие робота от автомата — бюджетный ремонт и обслуживание первого.
- Экономия также выражается в том, что робот потребляет меньше масла и топлива.
Достоинства и недостатки трансмиссии
Чтобы окончательно сделать выводы о том, что лучше: робот или автомат, стоит разобрать положительные и отрицательные стороны каждой из трансмиссий.
Сравнительная характеристика преимуществ и недостатков автоматизации представлена ниже.
| Преимущества | недостатки |
|
|
Следующим этапом является анализ преимуществ и недостатков роботизированных трансмиссий.
| Преимущества | недостатки |
|
|
Выбирая, что лучше: робот или автомат, следует ориентироваться на три основных принципа – комфорт, стоимость и надежность.
Современные автомобили оснащаются новыми типами трансмиссий, в том числе роботизированной коробкой передач. Чтобы разобраться в основных моментах, связанных с его работой, нужно понять, что такое робот-редуктор.
[Скрыть]
Что такое роботизированная трансмиссия?
Роботизированная коробка на автомобиле – это нечто среднее между МКПП и АКПП. По сути, роботизированная КПП – это «механика», оснащенная автоматическим сцеплением и возможностью переключения скоростей. Работа данного типа агрегатов зависит не от водителя, а от функционирования управляющего электронного модуля. Во время движения водитель должен только корректно передавать поступающие данные для обеспечения корректной работы КПП.
Устройство роботизированной коробки передач
Схематическое расположение конструктивных элементов МКПП
Чтобы понять, что это такое, нужно разобраться в устройстве агрегата. Дополнительные элементы для выжима сцепления, а также переключения и выбора скоростей называются исполнительными механизмами.
Роботизированная трансмиссия оснащена собственной системой управления, выполненной в виде блока управления, а также нескольких контроллеров. Эти датчики предназначены для взаимодействия с устройством. Роботизированная КПП принципиально отличается от традиционных коробок-автоматов и вариаторов.
Коробки передач роботов, как и механические, оснащены сцеплением. В этих типах агрегатов не используются трансмиссионные масла ATF.
В зависимости от производителя автомобиля роботизированная трансмиссия может комплектоваться одним или двумя сцеплениями:
- если сцепление только одно, то это однодисковый блок;
- если два, то трансмиссия преселективная.
Основные компоненты устройства роботизированного блока:
- Сама КПП.
- Приводы или сервоприводы. Предназначен для выжима сцепления и включения скоростей.
- Модуль управления, представляющий собой микропроцессорный блок. Используется для обработки и передачи команд.
- Внешние контроллеры. Количество датчиков может варьироваться в зависимости от производителя машины.
КПП
Рекомендуем подробнее разобраться с устройством роботизированного блока на примере. шестиступенчатая коробка с двумя сцеплениями. Агрегат выполнен в виде механической коробки передач, но оснащен двумя ведущими шкивами. Один из этих элементов устанавливается внутри другого. Внешний шкив имеет внутреннюю полость, в которую помещается внутренний компонент. На внешнем шкиве расположены шестерни привода второй, четвертой и шестой скоростей, а на внутреннем — шестерни первой, третьей, пятой и заднего хода.
Каждый вал роботизированной коробки передач оснащен отдельной муфтой.
Приводы или сервоприводы
Приводные устройства могут быть электрическими или гидравлическими. Электрический тип элементов выполнен в виде электродвигателя с редукторным устройством, а гидравлический тип считается гидроцилиндром. Шток последнего соединен с синхронизирующим устройством. Основным назначением исполнительных элементов является механическое перемещение синхронизирующих компонентов, а также включение и выключение сцепления.
Модуль управления
Модуль управления представляет собой микропроцессорный блок, на котором установлены внешние контроллеры. Эти датчики участвуют в электронной системе управления двигателем автомобиля. Датчик трансмиссии взаимодействует с контроллерами силового агрегата и других систем, например, АБС. Модуль управления можно совместить с микропроцессорным блоком управления ДВС, но трансмиссия будет работать по собственному алгоритму.
Канал Carvizor подробно рассказал об устройстве и конструктивных особенностях РКПП.
Особенности роботизированной коробки передач
Электропривод муфты приводится в действие электродвигателем, а также механической скоростью… Работа гидропривода основана на специальных цилиндрических устройствах, управление которыми осуществляется посредством электромагнитного клапана… Иногда роботизированная установка может быть дополнена электродвигателем, используемым для перемещения цилиндрических элементов и предназначенным для обеспечения работы гидромеханического модуля. Это моторизованное устройство характеризуется длительными изменениями скорости, которые могут составлять до полсекунды.
По сравнению с гидравлическим устройством, агрегат не требует постоянного поддержания необходимого уровня давления. В некоторых моделях Opel гидроагрегаты отличаются быстрым циклом переключения передач, обеспечивая переключение за 0,06 секунды. Но таких роботов обычно устанавливают на спортивные автомобили.
Коробка передач робота Принцип работы
Схема работы роботизированного блока
Роботизированный блок работает как механик — для начала движения и переключения передач водителю необходимо выжать педаль сцепления. Процедура включения этого механизма осуществляется с помощью исполнительного устройства, получающего импульс от модуля управления. После подачи сигнала узел медленно вращает зубчатую передачу.
Если трансмиссия оснащена двумя сцеплениями, то первоначально включается первое. После этого исполнительное устройство выбора и включения скорости переводит блок синхронизации на передачу первой скорости. Это приводит к его блокировке на валу и началу вращения вторичного шкива. Когда машина трогается с места, водитель нажимает на газ. Если трансмиссия однодисковая, следующая скорость будет активирована через определенный промежуток времени. В результате получается так называемый таймлапс.
Для предотвращения появления временной задержки и сокращения времени переключения передач агрегат оснащен вторым сцеплением и другим валом. Это привело к созданию преселективной коробки. При включении первой скорости вторая готова к включению, так как второе сцепление уже включено. Когда агрегат получает сигнал от блока управления, он быстро переключается с первой скорости на вторую.
Последующее переключение на более высокие и более высокие низкие скорости во время движения. Временной интервал переключения минимальный. Любое зарастание исключено, также нет провала тяги двигателя и прочих нюансов. В результате автомобиль движется динамично, а экономия топлива максимальна. Работа в автоматическом режиме достигается за счет регулярного анализа микропроцессорным модулем импульсов, поступающих от внешних контроллеров.
При приеме сигналов и их отправке микропроцессор учитывает:
- величину нагрузки на блок питания;
- скорость движения;
- положение, в котором находится педаль газа.
Роботизированные коробки имеют возможность ручного переключения скоростей, эту особенность можно назвать имитацией гидромеханического автомата. Некоторые типы агрегатов допускают блокировку при активации превышения скорости.
Блок-схема функционирования роботизированной системы I-Shift на автомобилях Honda
Режимы работы
Микропроцессорный модуль может работать в нескольких режимах:
- Спорт. Обычно активируется при движении по трассе, когда машина устойчиво едет с повышенной скоростью.
- Городской режим. Активируется при движении по городу или стоянии в пробке.
- Экономия Обеспечивает максимальную экономию топлива. Но скорость движения будет минимальной.
Как научиться ездить на роботизированной коробке передач? Основные функции управления
Для предотвращения возникновения неисправностей в работе трансмиссии необходимо знать как пользоваться роботом, а именно:
- как прогревать агрегат;
- как правильно начинать движения;
- как пользоваться коробкой передач при эксплуатации автомобиля в городском режиме.
Прогрев роботизированной коробки передач и особенности работы
Многие автопроизводители утверждают, что роботизированные узлы не нуждаются в прогреве. Но в этом вопросе нужно учитывать температуру рабочей жидкости в системе смазки и то, как ведет себя масло в морозных условиях. Расходные материалы некоторых типов при низких температурах загустевают и собираются на дне устройства. По стандарту процесс прогрева состоит из запуска двигателя и ожидания 2-3 минут. При прогреве автомобиля не нужно трогать рычаг КПП.
Если машина стоит в гараже, то выезжайте на ней спокойно и плавно во избежание толчков и рывков. При прогреве нужно следить за количеством оборотов, их количество в идеале будет минимальным и составит около 1 тысячи в минуту. Агрегат также следует прогревать летом, благодаря чему все узлы робота будут должным образом смазаны. Выполнение прогрева предотвратит быстрый износ и истирание компонентов машины.
Основные особенности эксплуатации, которые увеличат срок службы агрегата в целом:
- Нельзя допускать буксования при движении в мороз. Это приведет к быстрому износу приводов и узлов. Регулярное проскальзывание приведет к калибровке устройства.
- Специалисты не рекомендуют часто ездить по сильно заснеженным дорогам. Автомобиль может застрять и в конечном итоге вызвать пробуксовку.
- В качестве зимней резины рекомендуется использовать изделия с шипами. При установке на колеса со штатной резиной есть вероятность пробуксовки на льду.
- При длительном бездействии в течение нескольких дней и более рекомендуется установить селектор передач в положение E. Двигатель должен быть выключен.
- При плохом состоянии дороги специалисты советуют начать движение на второй скорости, но не сильно газовать.
Алексей Рыков рассказал об основных принципах управления роботизированной КПП на примере Лады Гранты.
Правила правильного запуска на коробке робот
Владельцам автомобилей, оснащенных роботизированными коробками передач, следует учитывать, что у некоторых автомобилей нет дополнительной опции помощь при запуске. В частности, речь идет о начале движения на возвышенности, в гору. Поэтому важно правильно научиться трогаться. Процедура запуска осуществляется так же, как и на машине с механическим узлом.
Подробнее о начале поездки:
- Рычаг стояночного тормоза должен быть поднят.
- Рычаг переключения передач установлен в режим А.
- Водитель легко, без усилий нажимает на газ.
- Одновременно отпускается рычаг стояночного тормоза.
Если при начале езды на улице минусовая температура и повышенная влажность, селектор коробки можно перевести в положение М1. Усилие на педали акселератора должно быть допустимым во избежание проскальзывания. Если машина оснащена гироскопом, то при выборе автоматического режима микропроцессор установки сам подберет нужную скорость и произведет переключение. Это позволит переключаться на пониженную передачу. Если водитель опытный, то с учетом ситуации он может выставить режим М при фиксации выставленной передачи.
Если изначально установлен скоростной режим, то скорость движения изменять не рекомендуется. Частота вращения двигателя должна быть в пределах от 2500 до 5000 об/мин, но не за пределами этого диапазона. При начале движения на спуске селектор трансмиссии устанавливается в режим А, а рычаг стояночного тормоза выключается.
Эксплуатация роботизированной коробки передач в городских условиях
Регулярная эксплуатация автомобиля в городском режиме и в пробках может привести к быстрому износу деталей трансмиссии. Чтобы этого не произошло, при остановке машины переводите рычаг переключения передач в режим N. Затем включается стояночный тормоз и двигатель останавливается. Если остановки кратковременные, например, в пробках, то нейтральный режим можно не включать, достаточно остановиться при установке рычага в положение А. Если автомобиль стоит в пробке более одного минут, то двигатель придется заглушить.
Василий Костин рассказал о тонкостях использования машин с установленным роботом.
Преимущества
Плюсы роботизированных блоков:
- Надежность конструкции блока в целом. В основе устройства лежит механическая составляющая, прошедшая многочисленные испытания и изученная специалистами. Благодаря этому по надежности данный тип коробки передач лучше обычных АКПП и вариаторов.
- Эксплуатация автомобиля с установленным роботизированным блоком позволяет экономить топливо. Если коробка передач и двигатель автомобиля не изношены, то экономия топлива может составить до 30%.
- Для заправки роботизированного блока требуется меньше смазочной жидкости, в среднем она составляет не более трех литров. Для сравнения, в коробки вариатора заливают около семи литров. Это преимущество позволяет сэкономить.
- Количество передач в роботах соответствует количеству скоростей на механике.
- Благодаря тому, что основу КПП составляет механическая часть, это позволяет проводить несложный ремонт. Навыками такого ремонта владеют многие специалисты, чего нельзя сказать о вариаторных агрегатах. Большинство распространенных проблем можно решить самостоятельно при правильном подходе.
- Срок службы системы сцепления больше, чем у МКПП, примерно на 40%. Речь идет не только об экономии денег, но и о безопасности.
- При эксплуатации автомобиля в городских условиях функция переключения скоростей в ручном режиме позволяет начать движение без загрузки агрегата.
недостатки
Роботизированные коробки передач имеют не только достоинства, но и недостатки, они приведены в соответствии с отзывами владельцев автомобилей с МКПП:
- Главный недостаток МКПП — проблемы с программированием трансмиссии. Автовладельцу может быть сложно перепрограммировать программное обеспечение, чтобы увеличить динамику машины и сэкономить ресурсы машины. Поэтому сложно настроить трансмиссию под конкретный стиль вождения. Водителю потребуется время, чтобы привыкнуть к тому, как работает автомобиль для комфортной эксплуатации.
- Низкая скорость включения скоростей и медленная реакция агрегата. Это связано с накладными расходами при программировании устройства. Эта проблема характерна для многих автоматических коробок передач.
- При движении в городских условиях и пробках, а также на неровных дорогах водителю следует перейти на ручной режим управления. В противном случае элементы системы сцепления изнашиваются быстрее. Это отражается на сроке службы агрегата в целом.
- Ощущаются рывки и рывки при переключении передач. Не все подразделения, но многие. Это связано с тем, что дроссельная заслонка не отпускается до переключения передач. Для устранения этой проблемы не нужно полностью выжимать педаль газа.
- Сцепление может размыкаться при движении в гору. Проблема связана с перегревом трансмиссионного агрегата. Если автомобиль движется в гору, рекомендуется перейти на ручное управление.
Решить проблему с перепрограммированием можно заменой прошивки микропроцессора, но это необходимо сделать по истечении гарантийного срока.
Канал HPC представляет реальный негативный отзыв потребителя о работе роботизированной установки на автомобиле.
Отличие роботизированной коробки передач от автоматической
Основные отличия роботизированной коробки передач от автоматических агрегатов:
- Особенности конструкции. Робот представляет собой механическую единицу, оснащенную микропроцессорным устройством управления. Автоматические коробки передач имеют свое устройство. Он также включает в себя электронный модуль, но механической составляющей в машинах нет.
- Автоматические коробки передач превосходят роботизированные агрегаты по скорости переключения передач. Также на автоматах процедура переключения выполняется более плавно.
- Роботизированные устройства имеют опцию ручного переключения. На автоматических агрегатах возможности ручного управления нет.
- Автомобили, оснащенные роботизированным блоком, потребляют меньше топлива. Им требуется меньше смазки для заправки.
- Порядок ремонта и обслуживания коробок передач, робот обойдется потребителю дешевле, чем АКПП.
Актуальность коробочного робота в России
Российские автопроизводители практически не устанавливают роботизированные блоки на свою продукцию. В 2015 году руководство автоконцерна ВАЗ объявило, что модели автомобилей Lada Priora будут оснащаться роботизированными коробками передач. Общий вес устройства составляет примерно 35 кг. Сам агрегат адаптирован для отечественных дорог и погодных условий, характерных для климата России.
Например, машины могут отказаться запускать двигатель автомобиля, если температура опускается ниже -25 градусов. Роботизированные агрегаты смогут эффективно функционировать и запускать ДВС при -40 градусах. Производитель АвтоВАЗ дает трехлетнюю гарантию на КПП, но утверждает, что средний срок службы устройства составит около десяти лет. Этот шаг был предпринят представительством концерна для увеличения продаж автомобилей Lada Priora.
На сегодняшний день из отечественных автомобилей роботизированные коробки передач устанавливаются только на Лады Гранты и Приоры.
Официальный канал Lada представил видеоролик о производстве робототехнических узлов для автомобилей Lada Granta.
Советы по выбору роботизированной коробки передач
Перед покупкой автомобиля с МКПП необходимо собрать как можно больше информации о функционировании того или иного типа трансмиссии. Рекомендуется изучить отзывы потребителей, так как некоторые версии роботов имеют «глюки», характерные для всей линейки. В частности, нужно знать про временной интервал при переключении передач. Лучше отдать предпочтение вариантам, в которых процедура переключения выполняется максимально быстро.
При выборе автомобиля также необходимо учитывать параметр индивидуальности устройства. Одни и те же передачи могут отличаться друг от друга. Проблемы, связанные с работой блока, зачастую можно убрать перепрошивкой микропроцессорного блока.
Основные неисправности роботов
Симптомы, которые могут указывать на проблему с устройством:
- На панели управления появился аварийный индикатор. Это может быть лампочка Check Engine или специальный символ, указывающий на проблемы в работе коробки передач.
- Во время движения водитель слышит посторонние звуки. Ненормальный вой или жужжание могут свидетельствовать о проблемах с трансмиссией.
- Нет реакции при нажатии на газ. Частота вращения двигателя не увеличивается или не увеличивается, а скорость движения не увеличивается.
- Появление масляной лужи под машиной. Это свидетельствует об утечке расходной жидкости из агрегата.
- Система сцепления проскальзывает.
- Когда водитель нажимает на газ и делает это плавно, или при переключении передач возникает рывок или рывок.
- Агрегат трансмиссии сам по себе перестает функционировать, автомобиль останавливается и не едет.
Большинство проблем вызвано некорректной работой микропроцессорного устройства. Если говорить о механических проблемах, то большинство из них связано с износом составных элементов. Такие детали обычно не подлежат ремонту и меняются.
Механические проблемы:
- износ вилки выбора скорости;
- Подшипники качения изнашиваются, слышен гул.
Фотогалерея
В этом разделе представлены фотографии роботов от разных автопроизводителей.
Видео «Как предотвратить быстрый выход из строя роботизированной КПП»
Пользователь JoRick Revazov рассказал о том, чего нельзя делать с роботизированным блоком на автомобиле.
Комплектный электропривод производства корпорации «Триол» предназначен для управления конвейерной линией протяженностью 415 м для системы частотно-регулируемого привода.
Техника производства корпорации «Триол» зарекомендовала себя как принципиально надежная для работы в подземных условиях шахт и рудников.
Акционерное общество «Транснациональная компания «КАЗХРОМ» Актюбинский завод ферросплавов — филиал АО «ТНК «КАЗХРОМ»
Уважаемая Анар Ондасыновна! В ответ на Ваш запрос подтверждаем, что преобразователи частоты, а также устройства плавного пуска производства Триол Корпорация, были поставлены и установлены на филиал АО «ТНК-Казхром» Актюбинского завода ферросплавов в 2006 году и эксплуатируются до сих пор.Устройства плавного пуска Триол АС-11-03 применяются для регулирования скорости вращения вентиляторов градирен, пуск компрессора на отсадочном комплексе КПФШ-50.За время эксплуатации УПП корпорации «Триол» нареканий и замечаний к оборудованию нет.Данное оборудование поступило на объект в полной заводской готовности, что позволило поставить его в эксплуатацию в течение 1 рабочего дня, и зарекомендовал себя как надежный прибор, работающий в тяжелых условиях эксплуатации с повышенной запыленностью и температурой.
Акционерное общество «Салехардэнерго»
Настоящим письмом выражаю благодарность ООО «Триол-Электрик» за поставку преобразователя частоты Триол АТ04-055 на предприятие ГТЭС ОАО «Салехардэнерго». Настоящим подтверждаю, что ООО «Триол-Электрик» поставил и ввел в эксплуатацию преобразователь частоты серии АТ04-055, заводской номер 2440, на предприятии ГТЭС ОАО «Салехардэнерго» в 2004 году. Преобразователь частоты работал на штатную нагрузку. За время эксплуатации отказов оборудования не выявлено. ООО «Триол-Электрик» зарекомендовало себя как надежный производитель и поставщик низковольтных преобразователей частоты. Надеемся на плодотворное и взаимовыгодное сотрудничество!
Башкирская генерирующая компания
На Ново-Стерлитамакской ТЭЦ ООО «БГК» по договору № 112/0879 от 12.04.15. с ООО «Триол-Нефть» внедрена система автоматического поддержания необходимого рабочего давления с использованием частотно-регулируемого привода Триол АТ27, обеспечивающего минимальный перепад давления между коллектором питательной воды и барабаном котла
ПАО «ГМК» Норильский никель
Выполнена в необходимом объеме наладка частотно-регулируемого электропривода нагнетателей №1, №2, №3 сернокислотного цеха Медного завода. Два высоковольтных преобразователя частоты АТ27 -М63-6/6-31С52М-С-44 с комплектными шкафами ввода-вывода и коммутацией в полном объеме выполняют заложенные в проекте функции регулирования частоты вращения и синхронного безударного перехода приводных двигателей 630 кВт, 6кВ для сетевого питания. Вам за помощь в решении возникающих вопросов.Отдельно хотелось бы отметить высокий профессионализм аджастера Нафикова Ришата Маратовича, выражаем ему благодарность.
ОАО «Турбонасос»
Настоящим подтверждаем принадлежность компании «Триол-Ойл» к предприятию ОАО «Турбонасос» (Госкорпорация по космической деятельности «Роскосмос»), г. Воронеж, ул. Острогожская, 107, поставлен и введен в эксплуатацию преобразователь частоты среднего напряжения серии АТ27-2М0-10/6С64М-К12-14, заводской номер 70879. Оборудование, поставленное ООО «Триол-Нефть», введено в эксплуатацию в декабре 2015 года и в настоящее время претензий по работе нет. Выражаем благодарность за проделанную работу.
ООО «Дорогобужская ТЭЦ»
В 2006 году ООО «Триол-Электрик» поставило преобразователь частоты АТ04-45К на ООО «Дорогобужская ТЭЦ». За весь срок службы оборудования отказов не выявлено. Корпорация Триол зарекомендовала себя как надежный производитель и поставщик низковольтного оборудования. ООО «Дорогобужская ТЭЦ» выражает благодарность ООО «Триол-Электрик» за качественную и своевременную поставку преобразователя частоты АТ04
РУП «Минскэнерго» филиал «Минские тепловые сети»
ООО «Триол-Электрик» зарекомендовало себя как надежный производитель и поставщик низковольтных преобразователей частоты. РУП «Минскэнерго» филиал «Минские тепловые сети» выражает благодарность ООО «Триол-Электрик» за изготовление качественного электротехнического оборудования.
ООО «Промрезерв», г. Москва
В 2013 году ООО «Триол-Электрик» поставило нам 3 преобразователя частоты АТ24-75К-380-х20000 и 3 пульта управления П24Э. При эксплуатации этих дисков нареканий нет. Надеемся на дальнейшее взаимовыгодное сотрудничество.
Череповецкая ГРЭС, Вологодская область
Что касается приводов АТ24, поставляемых Вашим предприятием, отметим следующие — преимущества: простое, гибкое меню настройки привода, удобное расположение клеммных зажимов для подключения внешних цепей. В целом по работе дисков АТ24 замечаний нет.
ОАО «Щекиноазот», Тульская область
В 2014 году ООО «Триол-Электрик» поставило нам три преобразователя частоты АТ24-55К-380-С10000 и три приставки П24Е. Компания Триол зарекомендовала себя как надежный производитель и поставщик низковольтных преобразователей частоты АТ24. ОАО «Щекиноазот» выражает благодарность ООО «Триол-Электрик» за качественную и своевременную поставку преобразователей частоты АТ24, за возможность отсрочки платежа, что позволило нам работать бесперебойно.
ООО «Билмарт», Республика Саха
С 2006 года мы используем преобразователи частоты Триол серии АТ24. Хочу отметить функциональность и отличное качество поставляемой продукции. Надеемся на дальнейшее успешное развитие наших деловых отношений.
ООО «ЭнергоКомплектация», Саратовская область
ООО «ЭнергоКомплектация» сотрудничает с ООО «Триол-Электрик» с 2013 года. За достаточно короткий срок ООО «Энергокомплектация» установило около 120 преобразователей частоты серии АТ24. За период сотрудничества ООО «Триол-Электрик» зарекомендовало себя как надежный партнер, выполняющий все взятые на себя обязательства. Имеет квалифицированный, отзывчивый центр технической поддержки
А мы думаем иначе.
Но если бы можно было разделить наше мышление на более человеческое и более машинное, как бы вы описали свой образ мышления?
Пройдите этот тест, и по вашим ответам мы сможем вам сказать, ближе ли вы к человеку или мыслите почти как робот.
Попробуем определить!
10+ человекоподобных роботов, ужасно похожих на людей
Geminoid-F
Модель касается лица человекоподобного робота, который создан в облике самой модели. Некоторые его части работают благодаря давлению воздуха. Мимика может очень точно повторять мимику реального человека.
Android Kodomoroid
This communication android from Japan was unveiled at a press conference during a robot exhibit at the Science Museum in London in February 2017.
Ibn Sina
Студенты университета ОАЭ изучают первого арабоязычного робота, способного общаться с людьми. Такие роботы могут работать секретарями, администраторами, продавцами и консультантами.
Jia jia
Этот робот общается с инженером из Университета науки и технологий Китая. Группе ученых понадобилось 3 года, чтобы создать Цзя Цзя. Свое творение они представили в апреле 2016 года. Робот умеет говорить, демонстрировать даже самую маленькую мимику, шевелить губами и телом.
Асуна
Этот робот был представлен на ежегодной Неделе дизайна в Токио в октябре 2017 года. Робот управляется дистанционно оператором, который наблюдает за посетителями через камеру.
Robot from Toshiba
This humanoid robot was exhibited at the CEATEC Electronics Show in Chiba Prefecture, Tokyo in October 2014.
Chihira Junko
Toshiba has создали робота специально для торговых центров. Этот автомобиль встречает посетителей торгового центра Tokyo. Презентация состоялась в декабре 2015 года. Стоит отметить, что робот может даже помогать иностранным туристам, общаясь с ними на английском и китайском языках.
Минами
Посетитель взаимодействует с роботом-гуманоидом Минами в магазине в Осаке в мае 2013 года. Робот может общаться с посетителями с помощью определенных фраз, таких как «Вы пришли один?» или «Давай сфотографируемся вместе».
Mirai Madoka
Этот робот-гуманоид был выставлен на выставке Robot Development & Application Expo в январе 2017 года. Выставка проходила в Токио.
Андроиды-близнецы
Ученый Йошио Мацумото демонстрирует роботов -близнецов в своей лаборатории в Цукубе, Япония в июле 2014. , стоит между роботом Ханом и роботом Софией во время их демонстрации на технологической конференции RISE в Гонконге в июле 2017 года.
ChihiraAico
Этот робот приветствует покупателей в магазине в Токио. Действие происходит в апреле 2015 года. Стоит отметить, что робот умеет улыбаться, петь и давать полезные советы покупателям.
Otonaroid
Этот человекоподобный робот общается с другими роботами, в частности с CommU и Sota. Действие происходит на пресс-конференции в Токио в январе 2015 года.
Компактные редукторы для современной робототехники: обзор
Введение
Промышленные роботы составляют основу нескольких крупных традиционных производственных отраслей, включая автомобилестроение и электронику. Сегодня многие регионы мира видят реальную возможность возродить обрабатывающую промышленность, внедряющую роботов на малых и средних предприятиях (МСП) и в вспомогательных службах, как правило, в здравоохранении (SPARC, 2015).
Для крупномасштабных, высокоавтоматизированных промышленных сред преимущество роботизированных решений по сравнению с операторами-людьми в основном заключается в (i) большей доступности и (ii) способности перемещать — обычно большие — полезные нагрузки с исключительной точностью позиционирования и на высокой скорости. . Эти аспекты имеют ключевое значение при разработке и выборе подходящих технологий для промышленного робота, особенно для первичных двигателей и трансмиссий, обеспечивающих движение этих устройств.
Применение в производстве малого и среднего бизнеса и персональный помощник бросают вызов этой традиционной парадигме робототехники. Ключ к успеху этих новых приложений заключается в очень высокой степени гибкости, необходимой для обеспечения безопасного и эффективного прямого сотрудничества с людьми для достижения общих целей. Эта цель требует, чтобы роботы сначала развили способность безопасно взаимодействовать с людьми в дисциплине, обычно называемой pHRI — физическое взаимодействие человека и робота.
pHRI оказывает широкое влияние на работу роботов. Опыт, накопленный за последние десятилетия, в основном в медицинской робототехнике, свидетельствует о том, что для безопасного и эффективного взаимодействия с человеком роботы должны в основном двигаться как люди, тем самым жертвуя некоторыми из своих традиционных преимуществ с точки зрения полезной нагрузки, точности и скорости. Эта ситуация привела к обильным исследованиям в последние годы, посвященным оптимальному выбору первичных двигателей и трансмиссий для приведения в действие HRI (Zinn et al., 2004; Ham et al., 2009).; Икбал и др., 2011; Вейл и Се, 2016 г.; Верстратен и др., 2016; Groothuis и др., 2018; Саеренс и др., 2019).
Эти работы относятся к более широкой области исследований, изучающих оптимизацию сцепления между первичным двигателем и коробкой передач для данной задачи в автоматических машинах. Краткий обзор основных достижений в этой области дает полезную информацию для понимания влияния редуктора на общую производительность системы. Паш и Сиринг (1983) определили важность инерции при срабатывании и предложили использовать передаточное отношение, соответствующее инерции двигателя и отраженной нагрузки, как средство минимизации потребления энергии для чисто инерционной нагрузки. Чен и Цай (1993) применил эту идею к области робототехники и определил результирующую способность к ускорению рабочего органа как определяющий параметр. Ван де Стрэте и др. (1998) разделили характеристики двигателя и нагрузки, чтобы распространить этот подход на общую нагрузку, и предложили метод определения подходящих передаточных чисел для дискретного набора двигателей и редукторов. Роос и др. (2006) изучали оптимальный выбор привода для силовых агрегатов электромобилей с учетом эффективности коробки передач. Гиберти и др. (2010) подтверждают инерцию ротора, передаточное отношение, эффективность редуктора и инерцию редуктора как наиболее важные параметры для выбора срабатывания и предлагают графический метод для оптимизации этого выбора для динамической задачи. Петтерссон и Олвандер (2009 г.)) снова сосредоточился на промышленных роботах и представил метод, который моделирует коробку передач с сильным акцентом на массу, инерцию и трение. Резазаде и Херст (2014) используют очень точную модель двигателя и включают фундаментальный критерий выбора полосы пропускания в дополнение к минимизации энергии. Дрессчер и др. (2016) исследуют вклад трения в планетарную коробку передач, в которой кулоновское трение является доминирующим механизмом трения, и демонстрируют, как эффективность коробки передач обычно становится доминирующей над эффективностью двигателя при высоких передаточных числах трансмиссии.
Начиная с первоначальных моделей редукторов, использованных в этих работах, где редукторы моделируются как идеальные передаточные числа, сложность моделей постепенно возрастала. Тем не менее, необходимо сделать важные — и нереалистичные — упрощения, чтобы добиться хорошей практической применимости этих методов. Таким образом, важные эффекты, такие как жесткость при кручении и потери движения, не учитываются, а модели инерции и эффективности редуктора сильно упрощены. Это оправданный подход для многих приложений, где упрощенные методы могут помочь инженерам выбрать подходящие трансмиссии. Однако в HRI эти свойства слишком важны для пригодности коробки передач, и их нельзя так сильно упростить.
Поэтому требуется другой подход, чтобы предоставить полезные рекомендации по выбору редуктора в HRI, избегая чрезмерной сложности задач оптимизации в этой области. Предоставление подробной информации об эксплуатационных свойствах и характеристиках различных технологий редукторов для обоснованного выбора является еще одним вариантом, следуя традициям таких работ, как Schempf and Yoerger (1993) или Rosenbauer (1995). Следуя этому подходу, Siciliano et al. (2010), Ли (2014), Шейнман и др. (2016), а также Фам и Ан (2018) представляют интересные обзоры высокоточных редукторов для современной робототехники. Однако технологии не проанализированы достаточно подробно, чтобы получить хорошее представление о сложных механизмах, в которых они влияют на выполнение роботизированной задачи.
Основная цель этого обзора состоит в том, чтобы последовательно дополнить эти работы подробным анализом основных принципов, сильных сторон и ограничений доступных технологий. Помимо прогнозирования будущего технологий коробок передач в робототехнике, этот подход может помочь неспециалистам по коробкам передач определить подходящие технологии компактных коробок передач для многофакторных требований новых роботизированных приложений (López-García et al., 2018). Специалистам по коробкам передач из других областей этот анализ может помочь получить полезную информацию о конкретных потребностях приложений HRI.
Это исследование начинается с краткого описания основных требований к будущим роботизированным трансмиссиям, чтобы затем представить структуру оценки, предназначенную для оценки пригодности и потенциала конкретной технологии коробки передач для этой области. Эта структура включает в себя сильную перспективу pHRI и включает новый параметр — коэффициент скрытой мощности — для оценки внутренней эффективности определенной топологии редуктора. Эта новая структура используется в первую очередь для обзора традиционных технологий редукторов, используемых в промышленных роботах, и новых технологий трансмиссии, которые в настоящее время находятся в процессе выхода на рынок. Наконец, в конце документа приводится краткое изложение выводов, полученных в результате этого обзора, вместе с нашими выводами и рекомендациями.
Усовершенствованная система оценки роботизированных трансмиссий, дополненная HRI
Управление
Управление роботизированными устройствами — очень широкая и сложная тема, которая является предметом обширной исследовательской литературы. В этом разделе мы ограничимся введением основных принципов линейности и отраженной инерции, которые являются основными для понимания влияния редуктора на управление.
Хотя в целом скорость и точность являются противоречивыми требованиями, обычные роботизированные устройства превосходно достигают высокой точности позиционирования на высокой скорости благодаря использованию жестких приводов с очень линейным поведением (Cetinkunt, 19). 91). Включение роботизированной трансмиссии влияет на сложность управления в основном двумя способами: введение дополнительных нелинейностей и сильное влияние на отраженные инерции.
Нелинейности, возникающие при включении трансмиссии, принимают в основном форму люфта и/или трения и уменьшают полосу пропускания системы, создавая серьезные проблемы управления (Schempf, 1990). Заявление о шестернях приводит к люфту, трению и (нежелательному) податливости, что затрудняет точное управление (Hunter et al., 1991) сегодня так же актуален, как и почти 30 лет назад. Для некоторых технологий большие погрешности кинематической передачи и особенно нелинейные характеристики трения также могут вызывать значительную нелинейность.
Передачи также сильно влияют на отраженную инерцию системы. В роботизированном устройстве инерция первичного двигателя обычно на несколько порядков меньше, чем у полезной нагрузки, что делает систему нестабильной и создает серьезные проблемы с управлением. Добавление трансмиссии сильно снижает инерцию полезной нагрузки, видимой первичным двигателем и отражаемой им, на коэффициент, равный квадрату коэффициента уменьшения трансмиссии. Таким образом, тщательный выбор трансмиссии может привести к более сбалансированной инерции с обеих сторон трансмиссии, способствуя минимизации энергопотребления и созданию более надежной, стабильной и точной системы (Pasch and Seering, 19).83).
Отраженная инерция особенно важна, когда рабочие органы подвергаются быстрым и частым изменениям скорости и/или крутящего момента, что является очень распространенной ситуацией в задачах автоматизации и робототехники. В этих случаях вводится перспектива пропускной способности, чтобы подтвердить способность системы следовать этим изменениям (Sensinger, 2010; Rezazadeh and Hurst, 2014). Это лежит в основе принципа обратной управляемости, способности системы демонстрировать низкий механический импеданс, когда она приводится в действие от ее естественного выхода (обратная управляемость). Это особенно важно при частом двунаправленном обмене энергией между роботом и его пользователем, характерном для реабилитационных устройств или экзоскелетов. Как показывают Ван и Ким (2015), способность редуктора к обратному ходу включает комбинированный эффект отраженной инерции, отраженного демпфирования и кулоновского трения, и поэтому она тесно связана с эффективностью редуктора.
Это подчеркивает важность для оценки управляющего воздействия определенной технологии коробки передач как ее передаточных чисел, так и нелинейностей (люфт, трение), которые она вносит.
Безопасность
Промышленные роботы традиционно размещаются за ограждениями в высоко структурированных средах, где они могут воспользоваться преимуществами своих быстрых и точных роботизированных движений, не ставя под угрозу целостность людей-операторов.
Безопасный pHRI, включающий возможность безопасного перемещения в неструктурированной/неизвестной среде, обязательно тесно связан с управляемостью. Текущая стратегия, используемая робототехниками для достижения этой цели, состоит из , формируя механический импеданс (Calanca et al., 2015), то есть позволяя контроллеру соответствия управлять сложным динамическим соотношением между положением/скоростью робота и внешними силами (Hogan, 1984).
Принцип прост: чтобы обеспечить хорошую адаптацию к неопределенной среде, а также целостность человека-оператора/пользователя во время взаимодействия с роботизированным устройством, последний должен двигаться податливым, человекоподобным образом (Караяннидис и др., 2015). Это подчеркивает важность импеданса и внутренней податливости (De Santis et al., 2008) и объясняет появление нового типа внутренне гибких приводов для pHRI (Ham et al., 2009).), где желательно высокое соблюдение требований (Хаддадин и Крофт, 2016).
С точки зрения управления инерция полезной нагрузки, отражаемая на первичный двигатель, уменьшается на коэффициент, соответствующий квадрату передаточного числа. Таким же образом обычно малая инерция ротора первичного двигателя усиливается этим же коэффициентом при отражении со стороны полезной нагрузки, которая должна быть добавлена к инерции, возникающей в результате движения роботизированного устройства и груза, по соображениям безопасности, далее ограничение рабочих скоростей.
Хотя сегодня в большинстве приводов pHRI используются редукторы с высоким передаточным числом, некоторые известные робототехники Seok et al. (2014), Sensinger et al. (2011) видят большой потенциал для робототехники в использовании двигателей с высоким крутящим моментом (out-runner), требующих очень малых передаточных чисел. Новые производители робототехнических решений, такие как Genesis Robotics из Канады или Halodi Robotics AS из Норвегии, предлагают приводы для робототехники, основанные на этих принципах. По их словам, увеличение инерции двигателя и уменьшение передаточного числа должно привести к снижению инерции двигателя, отражаемой на рабочий орган, что позволит увеличить рабочие скорости и/или полезную нагрузку без ущерба для целостности оператора. Низкие передаточные числа также имеют дополнительное преимущество в пропускной способности: они имеют более низкое трение и люфт, уменьшая вклад коробки передач в нелинейность. С другой стороны, умеренное передаточное число не может компенсировать нелинейные условия сцепления — обычно зубчатый крутящий момент (Siciliano et al., 2010).
При более внимательном рассмотрении спецификаций этих новых двигателей возникают некоторые вопросы с точки зрения достижимой эффективности, веса или компактности, а также последствий для оборудования, возникающих в результате крайней жажды высоких электрических токов (HALODI Robotics, 2018; GENESIS Robotics, 2020) .
Подводя итог, можно сказать, что нет единого мнения о том, как лучше всего подойти к безопасному запуску робототехники. Тем не менее, тесные естественные связи между безопасностью и управляемостью столь же очевидны, как и ключевое значение передаточного числа трансмиссии и ее нелинейности.
Вес и компактность
Легкая конструкция имеет первостепенное значение для обеспечения совместимости безопасности и хороших характеристик в приложениях новой робототехники (Albu-Schäffer et al. , 2008). Новейшие коллаборативные роботы (коботы), такие как легкий робот KUKA, разработанный в сотрудничестве с Институтом робототехники и мехатроники Немецкого аэрокосмического центра (DLR), основаны на этом принципе и, следовательно, сильно отличаются от тяжелых и громоздких традиционных промышленных роботов. Благодаря более низкой инерции легкие коботы обеспечивают более высокую производительность и более высокие скорости без ущерба для безопасности пользователя.
Этот выгодный аспект легкой конструкции имеет дополнительные преимущества. Для мобильных роботизированных систем меньший вес означает большую автономию. В носимых вспомогательных роботизированных устройствах, включая протезы и экзоскелеты, легкая конструкция также является ключевым аспектом повышения комфорта (Toxiri et al., 2019).
Высокая компактность — еще одна характерная черта, присущая этим новым робототехническим устройствам: от коботов до вспомогательных устройств. Компактность дает преимущества в маневренности и комфорте взаимодействия.
В роботизированных приложениях, связанных с тесным взаимодействием с людьми или предоставлением мобильных услуг, позиции по своей природе крайне неопределенны. Легкие и компактные конструкции особенно выгодны (Loughlin et al., 2007) для этих приложений с двумя последствиями: первичные двигатели и трансмиссии — как правило, самые тяжелые элементы в роботизированном устройстве — должны быть легкими и компактными, но легкие конструкции, как правило, требуют более низких крутящих моментов.
В отличие от веса редуктора определение подходящего критерия для оценки вклада редуктора в компактность системы является более сложной задачей. Физический объем определенно играет роль, но наш опыт показывает, что фактическая форма коробки передач имеет большее значение. Еще один аспект, о котором стоит упомянуть, это наличие в некоторых конфигурациях редукторов свободного пространства для размещения материала или движущихся частей, таких как электродвигатели или выходные подшипники, которые также могут представлять особый интерес. Поэтому мы решили включить в нашу систему оценки приблизительную форму (диаметр × длина) выбранного редуктора, в то время как наличие дополнительного пространства можно непосредственно оценить с помощью предоставленных цифр каждой из конфигураций.
Эффективность и виртуальная мощность
Эффективность
В таких областях, как автомобилестроение или ветряные турбины, эффективность редукторов уже давно находится в центре внимания. С другой стороны, в робототехнике эффективность до недавнего времени не становилась ключевым параметром при выборе подходящей коробки передач (Arigoni et al., 2010; Dresscher et al., 2016).
Более высокая эффективность — более низкие потери — позволяют снизить потребление энергии и вносят непосредственный положительный вклад как в эксплуатационные расходы, так и в воздействие машины или устройства на окружающую среду. Для мобильных и носимых роботизированных устройств более высокая эффективность помогает также снизить вес системы — требуются батареи меньшего размера — и в конечном итоге приводит к большей автономности и удобству использования (Kashiri et al. , 2018).
В редукторах есть еще одно преимущество в снижении потерь: большинство механических трансмиссий, используемых в робототехнике, являются замкнутыми и используют контакт зубьев для передачи крутящего момента и движения между первичным двигателем и рабочим органом. Благодаря этому кинематическое соотношение между входной ω In и выходной скоростью ω Out фиксируется числом зубьев и определяет его передаточное число i K . В редукторе без потерь отношение крутящего момента i τ между выходным и входным крутящими моментами τ точно соответствует обратному кинематическому передаточному числу с противоположным знаком. Но в реальной коробке передач наличие потерь меняет это равенство, а так как кинематическое передаточное число запирается числом зубьев, то абсолютная величина передаточного числа должна уменьшаться пропорционально потерям:
ωInωOut= iK=- η iτ=-ητOutτIn;где η представляет эффективность системы.
Следовательно, высокие потери в редукторе означают, что меньший крутящий момент доступен для рабочего органа, и для достижения того же усиления крутящего момента требуются более высокие передаточные отношения.
Коробки передач подвержены нескольким типам потерь. Для их классификации мы принимаем критерии, предложенные Talbot и Kahraman (2014), и разделяем их на зависящие от нагрузки (механические) потери мощности, возникающие в результате скольжения и качения контактных поверхностей как в контактах шестерен, так и в подшипниках, и — независимые (спиновые) потери мощности — возникающие при взаимодействии вращающихся компонентов с воздухом, маслом или их смесью.
Виртуальная мощность
Термин «Виртуальная мощность» был, насколько известно авторам, первоначально придуман Ченом и Анхелесом (2006), но это явление, объясняющее аномально высокие потери, присутствующие в некоторых планетарных топологиях, было известно в течение длительного времени при разные имена в том числе Blindleistung (Wolf, 1958; Mueller, 1998) и латентная или бесполезная сила (Macmillan and Davies, 1965; Yu and Beachley, 1985; Pennestri and Freudenstein, 1993; Del Castillo, 2002).
Коробка передач по своему принципу действия всегда включает в себя высокоскоростную сторону с низким крутящим моментом и сторону с высоким крутящим моментом и низкой скоростью. Таким образом, его внутренние зубчатые зацепления обычно работают в условиях высокого крутящего момента и низкой скорости или в условиях высокой скорости и низкого крутящего момента. Однако в некоторых коробках передач из-за их специфической топологии некоторые зубчатые зацепления могут одновременно сталкиваться с высокой скоростью и большим крутящим моментом. Зубчатые зацепления могут легко достигать эффективности выше 98%, но поскольку генерируемые потери приблизительно пропорциональны произведению относительной скорости двух зубчатых элементов и крутящего момента, передаваемого через зацепление (Niemann et al., 1975), в этих высоконагруженных зацеплениях возникают неожиданно большие потери. . Виртуальная мощность обеспечивает основу для оценки вклада этого явления, которое в дальнейшем мы будем называть топологической эффективностью редуктора.
Некоторые из вышеупомянутых авторов предлагают методы оценки топологической эффективности данной конфигурации и определения ее влияния на общую эффективность системы. В рамках Чена и Анхелеса (2006), виртуальная мощность определяется как мощность, измеренная в движущейся неинерциальной системе отсчета. Скрытая мощность , введенная Ю и Бичли (1985), соответствует виртуальной мощности, когда система отсчета является несущим элементом коробки передач, а коэффициент виртуальной мощности представляет собой отношение между виртуальной мощностью и мощностью, генерируемой внешним крутящим моментом. применяется по ссылке. Используя эти элементы, мы определяем коэффициент скрытой мощности топологии редуктора как отношение суммы скрытых мощностей во всех зацеплениях к мощности, подводимой к редуктору. Таким образом, большой коэффициент скрытой мощности соответствует низкой топологической эффективности и указывает на сильную тенденцию генерировать большие потери при зацеплении.
Чтобы облегчить понимание практического влияния на общую эффективность топологического КПД, характеризуемого коэффициентом скрытой мощности, данной конфигурации редуктора, мы используем на этом этапе уравнения, предложенные Макмилланом и Дэвисом (1965) для расчета упрощенный пример.
Полный редуктор робототехники обычно включает в себя несколько зацепляющих контактов, каждый из которых имеет разные рабочие условия и параметры, что приводит к различной эффективности зацепления. Эти КПД очень высоки в оптимизированных зубчатых зацеплениях — часто выше 99% — и позволяет нам упростить наши расчеты, учитывая общий, уникальный КПД зацепления η м = 99% во всех контактах зацепления в нашей коробке передач.
Во-первых, эталонный редуктор, идеальный с точки зрения топологической эффективности, будет иметь только одно зацепление и коэффициент скрытой мощности L = 1. Таким образом, потери мощности внутри этого эталонного редуктора можно легко рассчитать как функцию входного мощность как:
Ploss= PIN * (1-ηm)
Таким образом, общая эффективность зацепления всего редуктора соответствует эффективности одиночного зацепляющего контакта:
ηsys,ideal= PIN-PLossPIN=ηm=99%;
Неидеальный редуктор с одним и тем же общим η m во всех его зацеплениях и с коэффициентом скрытой мощности L, характеризующим его топологическую эффективность, показывает, что полные потери в редукторе могут быть аппроксимированы в первую очередь как:
Ploss, L≈ PIN* L *(1-ηm)
И общая эффективность зацепления всего редуктора становится теперь:
ηsys,L= PIN-PLoss,LPIN≈L * ηm+(1-L)
Что для η m = 99% и для значения L = 50 дает:
6 ηs,
L≈ 50% Этот результат должен быть частично относительным, потому что накопленные потери в первых зацеплениях, задействованных в различных потоках внутренней мощности в редукторе, приводят к тому, что меньшая виртуальная мощность, как предсказывается этими уравнениями, будет проходить через последующие зацепления. Результатом этого является то, что эффективность обычно падает немного медленнее при использовании коэффициента скрытой мощности, и более реалистичное значение для предыдущего расчета обычно составляет от 55 до 60%.
Чтобы частично компенсировать это большое влияние топологической эффективности на общую эффективность, конфигурации с большим коэффициентом скрытой мощности требуют чрезвычайно высокой эффективности сетки: для достижения эффективности системы >70% система с L = 100 нуждается в средней эффективности сетки КПД выше 99,5%.
Поэтому в нашем дальнейшем анализе мы сосредоточимся только на оценке вклада топологической эффективности в эффективность редуктора. Это позволяет нам использовать упрощенный метод для расчета коэффициента скрытой мощности, который в первую очередь не учитывает влияние потерь, вызванных снижением крутящего момента. Соответствующие расчеты, использованные для определения коэффициента скрытой мощности различных конфигураций коробки передач, проанализированных в этой работе, включены в Приложение I.
Подводя итог, чтобы охарактеризовать важное влияние КПД редуктора, мы оценим порядок величины трех параметров: (i) потери, зависящие от нагрузки, (ii) пусковой момент без нагрузки и (iii) коэффициент скрытой мощности. Хотя на него дополнительно влияет статическое трение, а не только кулоновское и вязкое трение, мы выбрали пусковой крутящий момент без нагрузки (относительно номинального крутящего момента) в качестве практического способа характеристики потерь, не зависящих от нагрузки. Наш обмен мнениями с производителями редукторов показывает, что это обычная практика, она не зависит от входной мощности и легко доступна в паспорте производителя.
Производительность
По сравнению со специальными и автоматическими сборочными машинами промышленные роботы не могут достичь таких же стандартов точности и скорости. Оба аспекта должны были быть скомпрометированы, чтобы обеспечить большую степень гибкости и мобильности, а также рабочего пространства (Rosenbauer, 1995). С этой точки зрения, HRI — это еще один шаг в том же направлении: чтобы удовлетворить дальнейшие потребности в гибкости и мобильности в неструктурированной среде, необходимы дополнительные компромиссы с точки зрения точности и скорости. Этот переход отражен на рис. 1.9.0003
Рисунок 1 . Графическое описание перехода основных целей задачи от машин через промышленных роботов и коботов к людям-операторам.
Точность и воспроизводимость
Несколько аспектов редуктора влияют на итоговую общую точность всего роботизированного устройства. Эти аспекты долгое время находились в центре внимания традиционной робототехники и сегодня хорошо изучены благодаря работам Майра (1989), Шемпфа и Йоргера (1993) или Розенбауэра (19).95), предоставляя очень хорошие ссылки для понимания этих сложных влияний. Эти исследования определяют особенно важную роль потери движения и жесткости при кручении.
Lost Motion — это дальнейшее развитие принципа люфта, который описывает полное вращательное смещение, создаваемое приложением ±3% от номинального входного крутящего момента.
Жесткость при кручении характеризует податливость к кручению всех элементов коробки передач, участвующих в полном потоке сил, под действием внешнего крутящего момента. Он устанавливается путем блокировки входа редуктора и постепенного увеличения крутящего момента на выходе, при этом регистрируются изменения жесткости на кручение, приводящие к отклонениям от идеально линейного поведения.
Точность по своей природе — малые потери движения и линейность, высокая жесткость на кручение — редукторы упрощают задачу управления и обеспечивают высокую точность, идеально подходящие для управления положением, в то время как менее точные редукторы усложняют управление положением и могут использоваться для более податливых срабатывание. В технологиях редукторов, где скорость оказывает сильное влияние на потери или особенно нелинейные характеристики трения, необходимо также учитывать вклад этих элементов в точность.
Чтобы охарактеризовать возможности точности, наша структура включает потери движения и жесткость на кручение вместе с субъективной оценкой изменения эффективности, вызванного изменениями скорости/крутящего момента.
Скорость и полезная нагрузка
Промышленные роботы могут обрабатывать большие полезные нагрузки за счет большой инерции. С другой стороны, для коботов соображения безопасности подразумевают, что они не должны справляться с такой большой полезной нагрузкой, но благодаря более легкой конструкции они могут фактически достичь большего соотношения полезной нагрузки к весу.
Соображения безопасности также ограничивают возможности использования этого снижения массы для увеличения рабочих скоростей (Haddadin et al., 2009). Тем не менее, более низкие крутящие моменты способствуют использованию более легких и быстрых электродвигателей, что в принципе требует более высоких передаточных чисел для этих применений.
Критерий для характеристики вклада редуктора в характеристики скорости и полезной нагрузки должен отражать эти аспекты и побуждать нас использовать в нашей структуре (i) максимальную входную скорость, (ii) максимальный повторяемый выходной крутящий момент — называемый ускоряющим крутящим моментом — и номинальный крутящий момент, ( iii) передаточное отношение и (iv) отношение крутящего момента к весу как для номинального, так и для ускоряющего крутящего момента.
Резюме
Характеристика роботизированных коробок передач является сложной задачей: высокая универсальность этих устройств и их сложное взаимодействие с первичными двигателями и системами управления делают прямое сравнение их характеристик особенно сложным.
Передаточное отношение оказывает сильное влияние на производительность роботизированной системы. Это объясняет его предпочтительную роль в литературе, посвященной оптимизации срабатывания роботов, и растущий интерес робототехников к возможностям использования регулируемых трансмиссий (Kim et al., 2002; Carbone et al., 2004; Stramigioli et al., 2008; Girard). и Асада, 2017). Хотя мы убеждены, что переменные трансмиссии очень перспективны и, безусловно, будут способствовать формированию будущего ландшафта робототехники, мы ограничили наш анализ здесь компактными коробками передач с постоянным передаточным числом. На данный момент мы считаем, что нам лучше всего подходит этот ограниченный объем, который на самом деле может также способствовать выявлению потенциальных областей применения и подходящих технологий для трансмиссий с переменным передаточным числом.
На основе этого анализа мы предлагаем систему оценки будущих роботизированных коробок передач на основе следующих параметров:
• Передаточное число
• Ускорение и номинальный выходной крутящий момент
• Вес
• Форма: диаметр × длина
• Отношение ускорения и номинального крутящего момента к весу
• Эффективность: пиковое значение и субъективная зависимость от условий скорости и крутящего момента
• Топологическая эффективность: отношение скрытой мощности
• Начальный крутящий момент без нагрузки в прямом и обратном направлении в % от номинального входного крутящего момента
• Независимые от нагрузки потери
• Потеря движения
• Максимальная входная скорость
• Жесткость при кручении
Наша структура также включает эталонный вариант использования , репрезентативный для нескольких задач pHRI согласно нашему собственному опыту: крутящий момент ускорения более 100 Нм и передаточное число более 1:100, для которых должны быть оптимизированы вес, компактность и эффективность.
Обзор технологий передачи, используемых в настоящее время в промышленных роботах
Электрические двигатели, оснащенные механическими трансмиссиями, обычно выбираются в качестве приводов в робототехнике (Rosenbauer, 1995; Scheinman et al., 2016), а также в промышленных роботах. Эти механические трансмиссии почти неизбежно основаны на какой-либо зубчатой технологии (Sensinger, 2013).
Благодаря их большей способности снижать общий вес, а также тому, что электродвигатели, как правило, имеют более высокий КПД при высоких рабочих скоростях, еще одной характеристикой промышленных роботизированных трансмиссий является использование относительно больших коэффициентов передачи (передаточных чисел), обычно превышающих 1: 40 (Розенбауэр, 1995).
Планетарные редукторы: чрезвычайно универсальная платформа
Планетарные зубчатые передачи (PGT) — это компактные, очень универсальные устройства, широко используемые в силовых передачах. Благодаря своей характерной коаксиальной конфигурации и хорошей удельной мощности они особенно подходят для вращательных первичных двигателей, таких как электрические двигатели.
PGT могут использовать две дифференцированные стратегии для достижения высокого коэффициента усиления: (i) добавление нескольких ступеней обычных, высокоэффективных PGT (здесь они называются редукторами и представлены на рис. 2) или (ii) использование особенно компактных конфигураций PGT с возможностью производить высокие передаточные числа.
Рисунок 2 . Внутреннее устройство редуктора Neugart с указанием его основных элементов, адаптировано из Neugart (2020) с разрешения © Neugart GmbH. Он включает также схему лежащей в его основе топологии.
Несмотря на то, что использование нескольких ступеней редуктора обеспечивает наилучшее использование высокой эффективности зацепления шестерен и приводит к созданию высокоэффективных редукторов, это обычно приводит к тяжелым и громоздким решениям. С другой стороны, компактные конфигурации PGT могут достигать высоких передаточных чисел в очень компактных формах, но они страдают от неожиданно высоких потерь, связанных с высокой виртуальной мощностью (Crispel et al. , 2018).
Особо компактная конфигурация PGT для высоких передаточных чисел была впервые изобретена Вольфромом (1912 г.) и использовалась в редукторах серии RE компании ZF Friedrichshafen AG (ZF), предназначенных для применения в промышленных роботах (Looman, 1996 г.). На эту конфигурацию, показанную на рис. 3, сильно влияет Virtual Power, и ZF представляет собой единственное известное коммерческое применение конфигураций PGT, отличных от обычных редукторов. Хотя производство серии RE было прекращено в 90, Wolfrom PGT в последнее время вызывают растущий интерес сообщества исследователей робототехники, как мы резюмировали в предыдущей статье авторов (López-García et al., 2019a).
Рисунок 3 . Внутреннее устройство ZF серии RG Wolfrom PGT для применения в робототехнике адаптировано из Looman (1996) с разрешения © 1998 Springer-Verlag Berlin Heidelberg. Он включает также схему лежащей в его основе топологии.
В таблице 1 представлена оценка PGT. Несмотря на то, что размеры PGT RG350 Wolfrom компании ZF завышены для нашего эталона, мы использовали PGT ZF, чтобы попытаться оценить потенциал конфигураций PGT с высоким передаточным отношением, основываясь на существующих доказательствах его пригодности для достижения высоких передаточных чисел (Арнаудов и Караиванов, 2005; Мульцер, 2010). ; Капелевич и AKGears LLC, 2013). Для редукторов мы выбрали — при поддержке производителей — подходящие решения из портфолио Wittenstein и Neugart. Стоит отметить важную роль, которую играет максимальное передаточное отношение на ступень в редукторе: в то время как Wittenstein ближе к максимально возможному, учитывая предотвращение контакта между соседними планетами, Neugart выбирает в своей серии PLE (серия PLFE может достигать 1:100). соотношения только в двух каскадах) более строгий подход и, следовательно, требует трех каскадов вместо двух для Виттенштейна, чтобы достичь общего усиления 1:100. Это приводит к менее компактным решениям и более низкой эффективности для приложения 1:100, но позволяет компании Neugart достигать более высоких коэффициентов усиления — до 1:512 — без фундаментальных изменений в весе, размере или эффективности.
Таблица 1 . Система оценки решений для планетарных зубчатых передач.
Редукторы весят около 4 кг, что нельзя напрямую сравнивать с увеличенным RG350. RG350 имеет форму большего диаметра и меньшей длины, чем редукторы. С точки зрения отношения крутящего момента к весу значения обоих решений кажутся относительно близкими.
Редукторы имеют большое преимущество в их хорошем КПД (более 90%), которые также менее чувствительны к изменениям условий эксплуатации, а пусковые моменты на холостом ходу очень низкие. Конфигурации с высоким коэффициентом показывают, как сильное ограничение топологической эффективности приводит к снижению эффективности. Это, вероятно, объясняет, почему зубчатые передачи сегодня являются доминирующей технологией PGT в робототехнике.
PGT показывают самые высокие входные скорости (до 8500 об/мин), но их потери движения также самые большие (4–6 угловых минут) в обычных коробках передач. В робототехнике PGT широко использовались в первых промышленных роботах, в то время как в последние десятилетия их использование сильно сократилось, в основном из-за их ограничений по уменьшению люфта. Хотя существуют механизмы, ограничивающие изначально больший люфт PGT, они практически основаны на введении определенной предварительной нагрузки, что отрицательно сказывается на их эффективности (Schempf, 19). 90).
Harmonic Drives: легкий волновой редуктор с нулевым люфтом
Волновой редуктор был изобретен Musser (1955) и нашел широкое применение в 70-х годах, первоначально в аэрокосмической отрасли. Его основное космическое применение было в качестве механического элемента трансмиссии в луноходе Аполлона-15 в 1971 году (Schafer et al., 2005).
Его название связано с характерной деформацией его Flexspline , нежесткой тонкой цилиндрической чашки с зубьями, которая служит выходом. Flexspline входит в зацепление с фиксированным сплошным круглым кольцом с внутренними зубьями шестерни, Круговой шлиец , в то время как он деформируется вращающейся эллиптической пробкой — Генератор волн , как видно на рисунке 4. Этот тип редуктора чаще всего называют Harmonic Drive© (HD) из-за очень эффективная стратегия защиты интеллектуальной собственности.
Рисунок 4 . Внутренняя конфигурация коробки передач Harmonic Drive CSG (слева), адаптированная из Harmonic Drive (2014) с разрешения © Harmonic Drive SE, 2019, и коробка передач E-Cyclo (справа), адаптированная из SUMITOMO (2020) с разрешения © 2020 Sumitomo Drive Германия ГмбХ. Также включена схема лежащей в их основе топологии KHV, которая использовалась для расчета коэффициента скрытой мощности в Приложении I.
Для сравнительного анализа мы выбрали два подходящих редуктора Harmonic Drive: CSD-25-2A, предназначенный для интеграции в роботизированный шарнир для обеспечения адекватных структурных граничных условий, и сверхлегкий редуктор CSG-25-LW, представляющий собой конструктивно достаточное решение. , что можно более непосредственно сравнить с другими технологиями. Совсем недавно SUMITOMO представила новый редуктор E-CYCLO, также основанный на волновом принципе действия. SUMITOMO предоставила нам доступ к своему последнему каталогу (SUMITOMO, 2020), что позволило нам включить его в наш тест (таблица 2). Еще одна интересная волна напряжения, очень похожая на Harmonic Drive, недавно была представлена компанией GAM в серии роботизированных коробок передач, которая также включает в себя планетарные зубчатые передачи и циклоидные приводы (GAM, 2020).
Таблица 2 . Структура оценки решений для волн деформации.
Выбранная модель CSG имеет значительно больший крутящий момент, чем указано в нашем эталонном тесте. Форма характеризуется большими диаметрами, чем длинами, а вес значительно ниже, чем у других технологий, и приводит к лучшим отношениям крутящего момента к весу среди анализируемых технологий. Действительно, характерное зацепление с несколькими зубьями обеспечивает большее сопротивление крутящему моменту, чем в PGT, что делает эту технологию очень подходящей для соединений ближе к рабочему столу, где они часто встречаются в современных промышленных роботах.
Пиковый КПД ниже, чем у редукторов, и ближе к RG350, а КПД особенно чувствителен к условиям эксплуатации. Поезда Strain Wave демонстрируют большие независимые от нагрузки потери и пусковые моменты без нагрузки, особенно в условиях обратного движения, которые становятся особенно важными для высоких скоростей и/или низких крутящих моментов (Harmonic Drive, 2014). Для роботизированных устройств HRI, подверженных частым изменениям скорости и полезной нагрузки в сочетании с обменом энергией между роботизированным устройством и пользователем, это означает, что средняя эффективность быстро падает ниже 40–50% (López-García et al. , 2019).б). Заслуживает внимания также их большой коэффициент скрытой мощности, указывающий на одновременное наличие высоких крутящих моментов и скоростей в зацеплениях зубьев, что также помогает объяснить относительно низкий КПД.
Еще раз благодаря зацеплению с несколькими зубьями можно достичь потерь движения менее 1 угловой минуты, что дает этому редуктору сильное преимущество, помогающее Harmonic Drives найти широкое применение в промышленных роботах. Они смогли вытеснить PGT из многих приложений, особенно после значительного улучшения производительности в результате новой геометрии зубьев, представленной этой компанией в 90, что также улучшило линейность жесткости (Slatter, 2000).
В прошлом максимальная входная скорость была серьезным ограничением для использования редукторов HD (Schempf, 1990), но новые усовершенствования и усовершенствования конструкции теперь позволяют им достигать скорости до 7500 об/мин.
Циклоидные приводы: для высокой прочности и жесткости при кручении
С момента изобретения Лоренцем Брареном в 1927 г. (Li, 2014) циклоидные приводы нашли применение в основном в лодках, кранах и некотором крупном оборудовании, таком как поезда для прокатки стальных полос или станки с ЧПУ. . В циклоидных приводах эксцентричное входное движение создает колебательное циклоидальное движение одного большого планетарного колеса, которое затем преобразуется обратно во вращение выходного вала и приводит к высокой редукционной способности (Gorla et al., 2008), см. Рисунок 5.
Рисунок 5 . Внутренняя конфигурация циклоидных приводов SUMITOMO Fine Cyclo F2C-A15 и Fine Cyclo F2C-T155 с указанием основных элементов адаптирована из SUMITOMO (2017) с разрешения © 2017 Sumitomo Cyclo Drive Germany GmbH. Он включает также схему лежащих в его основе топологий.
Таблица 3 включает лидера рынка (NABTESCO RV) в этом сегменте и основных претендентов (SPINEA и SUMITOMO). RV от NABTESCO и серия Fine-Cyclo T от SUMITOMO включают обычную ступень PGT с предварительной передачей. Полезная нагрузка этих устройств больше, чем требуется для нашего теста, и приводит к большому весу. Это уже дает ценную информацию: более компактные решения недоступны на рынке и, согласно информации, предоставленной некоторыми производителями, менее интересны, поскольку требуют предельной точности изготовления и в конечном итоге приводят к высоким затратам.
Таблица 3 . Структура оценки решений циклоидного привода.
Формы аналогичны формам волновых редукторов, а вес больше и ближе к весу PGT по вышеупомянутым причинам. Отношение крутящего момента к весу больше, чем у PGT, но немного ниже, чем у волновых редукторов. Основное преимущество циклоидных приводов заключается именно в их способности выдерживать большие нагрузки, особенно ударные, и в малом объеме технического обслуживания.
Пиковый КПД выше, чем у волновых редукторов, и ближе к КПД PGT, но КПД сильно зависит от условий эксплуатации (Mihailidis et al., 2014), а пусковой момент без нагрузки и коэффициент скрытой мощности высоки, оба похожи на редукторы деформации.
Хотя они, как правило, вызывают некоторый люфт, такой, если его часто компенсируют в их конструкции, чтобы достичь уровней, сравнимых с редукторами с волновой деформацией, вероятно, за счет немного более высокого трения. Их жесткость на кручение является самой большой из проанализированных технологий коробок передач.
Циклоидные приводы имеют врожденное ограничение, связанное с высокими входными скоростями, вызванное наличием большого и относительно тяжелого планетарного (кулачкового) колеса, что приводит к большой инерции и дисбалансу. Это мотивирует использование обычно двух планетарных колес, расположенных последовательно и смещенных на 180 градусов друг к другу, чтобы устранить дисбаланс, уменьшить вибрации и обеспечить более высокие входные скорости. Это объясняет, как благодаря комбинированию циклоидных приводов со ступенями предварительной передачи, состоящими из обычных ступеней PGT, циклоидные приводы получили широкое распространение в робототехнике. Такое расположение повышает эффективность, снижает чувствительность к высоким входным скоростям и обеспечивает легкую адаптацию их передаточных чисел. В 90’s Harmonic Drives доминировали на рынке роботизированных коробок передач, но усовершенствования в циклоидной технологии позволили циклоидным приводам начать завоевывать территорию сначала в Японии, а затем и в других странах (Rosenbauer, 1995). В настоящее время такие производители, как NABTESCO, SUMITOMO или NIDEC, предлагают циклоидные гибриды с предварительной передачей PGT, охватывающие более 60% рынка роботизированных коробок передач, и поэтому они стали новой доминирующей технологией, особенно для проксимальных суставов, подверженных более высоким нагрузкам и меньшим ограничениям по весу (WinterGreen). исследования, 2018).
Наконец, стоит упомянуть наличие относительно большой пульсации крутящего момента, которая вносит нелинейности и усложняет их контроль. Эта пульсация крутящего момента связана с необходимостью использования циклоидных профилей зубьев, чтобы избежать взаимодействия зубьев между большими планетарными колесами и зубчатым венцом, что делает эти устройства чрезвычайно чувствительными к изменениям межосевого расстояния, вызванным даже небольшими производственными ошибками. Существует несколько попыток улучшить эту ситуацию с использованием эвольвентных зубьев — менее чувствительных к изменениям межцентрового расстояния — с уменьшенными углами давления и/или коэффициентами контакта для минимизации радиальных сил и повышения эффективности (Морозуми, 19). 70), а также с использованием других форм неэвольвентных зубов (Коряков-Савойский и др., 1996; Хлебаня, Куловец, 2015).
Обзор новых технологий трансмиссии для робототехники
Усилитель крутящего момента REFLEX
Компания Genesis Robotics привлекла большое внимание в сообществе робототехники выпуском двигателя с прямым приводом LiveDrive © . Согласно Genesis, LiveDrive в двух доступных топологиях — с радиальным и осевым потоками — обеспечивает эталонную производительность по соотношению крутящего момента к весу. Двигатель с осевым потоком может достигать 15 Нм/кг, в то время как радиальный поток ограничен максимум 10 Нм/кг.
Чтобы расширить спектр своего применения, компания Genesis Robotics представила совместимый редуктор под названием Reflex , показанный на рис. 6. Этот изготовленный литьем под давлением сверхлегкий пластиковый редуктор предназначен для легких LiveDrive и, следовательно, ориентирован на передаточные числа ниже 1:30, он также способен обеспечивать более высокие передаточные числа до 1:400 (GENESIS, 2018).
Рисунок 6 . Внутренняя конфигурация и основные элементы редуктора Reflex адаптированы из GENESIS Robotics (2020) с разрешения © 2019Генезис Роботикс. Он включает также схему лежащей в его основе топологии.
В основе лежит топология Wolfrom PGT с несколькими меньшими планетами (Klassen, 2019), в которой реактивное (неподвижное) кольцевое зубчатое колесо разделено на две части для целей балансировки в соответствии с конструкцией, первоначально предложенной Россманом (1934) и использованной а также в Hi-Red Gear Tomcyk (2000).
В редукторе Reflex выходное кольцо также разъемное для облегчения сборки со спиральными зубьями. Еще одним интересным аспектом этой конструкции является лентовидная форма сателлитов, которая, по мнению авторов, связана с возможностью предварительного нагружения системы для достижения нулевого люфта, который, как утверждает Genesis, возможен с этой коробкой передач. По словам компании, гибкость пластиковых планетарных колес также способствует уменьшению люфта.
К сожалению, пока недоступны независимые тесты, подтверждающие данные характеристики, и на данный момент нет официальных данных, в частности, об эффективности от Genesis, поэтому в Таблицу 4 включено только значение коэффициента скрытой мощности, полученное из его топологии.
Таблица 4 . Структура оценки новых технологий коробок передач.
Таким образом, несмотря на то, что лежащая в основе топология Wolfrom указывает на то, что эффективность, безусловно, будет сложной задачей, эта инновационная коробка передач иллюстрирует большой потенциал, доступный для переосмысления существующих технологий и их адаптации к будущим потребностям робототехники. Genesis Robotics недавно вступила в интересное партнерство с известными промышленными компаниями, такими как Koch Industries Inc. и Demaurex AG.
Привод Архимеда
Компания IMSystems из Нидерландов является дочерней компанией Делфтского технологического университета, созданной в 2016 году для использования изобретения Привода Архимеда (Schorsch, 2014).
Привод Archimedes снова повторяет топологию редуктора Wolfrom (также с разрезным зубчатым венцом в некоторых конструкциях), но включает революционную инновацию в использовании роликов вместо зубчатых колес, чтобы заменить контакты зубьев контактами качения, см. Рис. 7. Контролируемая деформация сателлитов-катков позволяет передавать крутящий момент между сателлитами аналогично колесам автомобиля.
Рисунок 7 . Внутренняя конфигурация Archimedes Drive с подробным изображением его планет Flexroller, адаптированным из IMSystems (2019) с разрешения © 2019 Innovative Mechatronic Systems B.V., со схемой его базовой топологии.
Производительность, показанная в таблице 4, взятой из брошюры компании (IMSystems, 2019) и доступной по запросу, показывает, что использование топологии Wolfrom дает этому устройству возможность достигать очень высоких передаточных чисел в компактной форме, но это также приводит к низкой топологической эффективности. По данным IMSystems, замена контакта зубьев шестерни на контакт качения способствует минимизации контактных потерь, что, в частности, при передаче крутящего момента между планетарной передачей и кольцевыми роликами должно компенсировать высокий коэффициент скрытой мощности и привести к максимальной эффективности. около 80% (IMSystems, 2019 г.)). Данные по пусковым моментам или независимым от нагрузки потерям не предоставляются.
Для обеспечения передачи высокого крутящего момента без проскальзывания необходимо строго контролировать деформацию планетарных роликов, а также производственные допуски редуктора. Это представляет собой одну из основных технологических проблем и является основой инноваций, представленных этой технологией (Schorsch, 2014).
NuGear
STAM s.r.l. — частная инжиниринговая компания из Генуи, которая помогла разработать роботизированное соединение для робота-гуманоида I-Cub. Их NuGear представляет собой нутирующий редуктор, который изначально был задуман (Barbagelata and Corsini, 2000) для космических приложений, но может развить свой потенциал и для робототехники за счет исследования альтернативных производственных средств.
В открытом доступе нет информации о рабочих характеристиках этого редуктора, что означает, что мы можем предоставить здесь только предварительный анализ его топологии и итоговых характеристик, которые можно ожидать на основе ограниченной информации, доступной в основном из проекта Caxman EU. (CAxMan, 2020), для которых NuGear был вариантом использования, и из доступных патентов (Barbagelata et al., 2016).
На Рисунке 8 внутренняя структура NuGear представлена с использованием эквивалентной конфигурации PGT — без аспекта нутации для облегчения понимания. При этом становится ясно, что NuGear напоминает два PGT Wolfrom, для которых несущая используется в качестве входа, соединенных последовательно, и где каждый из них соответствует одному из двух этапов, определенных в Barbagelata et al. (2016). Это еще раз указывает на то, что в этой коробке передач будут присутствовать относительно высокие коэффициенты скрытой мощности. Для передаточного числа 1:100 и при условии сбалансированного усиления 1:10 на каждой из двух ступеней, как это предложено в Barbagelata et al. (2016), мы получаем, используя уравнения, полученные в Приложении I, коэффициент скрытой мощности 32, что указывает на аналогичную топологическую эффективность эффективности Wolfrom PGT.
Рисунок 8 . Внутренняя конфигурация двухступенчатого редуктора NuGear для версии с оппозитными планетарными контактами адаптирована из CAxMan (2020) с разрешения © Stam S.r.l. Он включает также схему лежащей в его основе топологии.
Остается подтвердить, в какой степени использование методов аддитивного производства может помочь STAM s.r.l. уменьшить большие производственные затраты на конические зубчатые колеса, а также может ли операция нутации обеспечить достаточную надежность и более компактную форму, что может открыть двери для ее использования в области робототехники (CAxMan, 2020).
Двусторонний привод
Компания FUJILAB в Иокогаме предложила в Fujimoto (2015) коробку передач с высоким обратным ходом для робототехники, которая особенно подходит для работы без датчика крутящего момента (Kanai and Fujimoto, 2018).
Как видно на рис. 9, конфигурация этого устройства опять же соответствует конфигурации Wolfrom PGT. Используя эту топологию, Fujimoto et al. смогли достичь при передаточном числе 1:102 КПД прямого хода 89,9% и КПД заднего хода 89. .2%. Пусковой момент без нагрузки в направлении обратного хода составил 0,016 Нм в редукторе с внешним диаметром ~ Φ50 мм (Kanai and Fujimoto, 2018). Стратегия, используемая для достижения такой высокой эффективности с топологией Wolfrom, заключается в оптимизации коэффициентов сдвига профиля (Fujimoto and Kobuse, 2017).
Рисунок 9 . Внутренняя конфигурация двустороннего привода, высокоэффективного редуктора, способного достигать передаточного числа 1:102 с использованием топологии Wolfrom, любезно предоставлена © Yasutaka Fujimoto.
Эти многообещающие результаты — см. Таблицу 4 — показывают, что выравнивание отношений подхода и углубления посредством оптимизации коэффициентов сдвига профиля может привести к чрезвычайно высокой эффективности построения сетки. Насколько известно авторам, эта стратегия была первоначально предложена Hori and Hayashi (1994) и особенно интересна для топологии Wolfrom, где она может в конечном итоге обеспечить эффективность выше 90% в сочетании с высокими передаточными числами и компактными топологиями.
Подшипник шестерни привода
После новаторской работы в этой области Джона М. Враниша из НАСА, результатом которой стало изобретение планетарной передачи без водила Вранишем (1995 г.) и подшипников с неполным зубчатым зацеплением (Враниш, 2006 г.), Центр космических полетов представил свою концепцию нового зубчато-подшипникового привода в Weinberg et al. (2008).
Северо-восточный университет в Бостоне продолжил разработку этого нового привода для применения в роботизированных соединениях. Как видно на рис. 10, он включает в себя редуктор Wolfrom, приспособленный для включения безводиловой конструкции Vranish и зубчатых подшипников. Зубчатые подшипники представляют собой контакты качения, которые предусмотрены для каждой пары зацеплений шестерен в соответствии с их делительным диаметром и снижают нагрузку на подшипники редуктора (Brassitos et al., 2013). Эта топология обеспечивает удобную интеграцию электродвигателя, который, таким образом, встроен в полую область внутри большого солнечного зубчатого колеса в конфигурации, специально предназначенной для космических приложений (Brassitos and Jalili, 2017).
Рисунок 10 . Внутренняя конфигурация зубчато-подшипникового привода, включая встроенный бесщеточный двигатель, адаптированная из Brassitos and Jalili (2017) с разрешения © 2017 Американского общества инженеров-механиков ASME. Справа также показана базовая топология Вольфрома с расщепленным реакционным кольцом.
В Brassitos and Jalili (2018) металлический прототип зубчато-подшипникового привода с передаточным числом 1:40 характеризуется жесткостью, трением и кинематической ошибкой. Измерения полностью соответствуют измерениям FUJILAB и подтверждают низкий пусковой крутящий момент без нагрузки в этой конфигурации (0,0165 Нм для внешнего диаметра редуктора ~Φ100 мм). После экспериментального измерения жесткости, трения и кинематической погрешности их привода (Brassitos and Jalili, 2018) они интегрировали эти значения в динамическую модель, которая затем была смоделирована и сравнена с реакцией скорости разомкнутого контура системы при свободном синусоидальном движении, показав хорошие результаты. корреляции и предполагает очень удобную высокую линейность передачи.
Предварительные измерения показали хороший комбинированный КПД двигателя и редуктора Wolfrom с передаточным числом 1:264 (Brassitos et al., 2013), что не очень хорошо коррелирует с расчетным коэффициентом скрытой мощности, равным 196. Эффективность не снова были в центре внимания недавних статей авторов, и мы, к сожалению, не смогли на данный момент подтвердить окончательные уровни эффективности, которых могут достичь более новые прототипы.
В любом случае привод Gear Bearing предлагает очень интересные возможности для использования потенциала топологии Wolfrom в робототехнике. Возможность отказаться от держателя и встроить электродвигатель внутрь редуктора в общем корпусе позволяет создавать впечатляюще компактные конструкции. Возможность использования роликов с зубчатыми подшипниками для снижения радиальной нагрузки на подшипники также является многообещающим вариантом для повышения компактности и повышения эффективности (Brassitos et al. , 2019).).
The Galaxie Drive
Schreiber and Schmidt (2015) защищает основные инновации, включенные в Galaxie Drive, редуктор, который WITTENSTEIN в настоящее время выводит на рынок прецизионных редукторов через свой стартап Wittenstein Galaxie GmbH, созданный в апреле 2020 года.
Хотя техническое описание и подробная информация еще не доступны, принцип работы и ожидаемые выгоды также были раскрыты. В Galaxie Drive используется новый кинематический подход, основанный на линейном ведении единственного зуба в Держатель зубьев , но, по мнению этих авторов, его топология напоминает топологию зубчатого колеса, см. рис. 11. Гибкий шлицевой элемент заменен держателем зубьев, включающим два ряда отдельных зубьев, расположенных для радиального перемещения и зацепления с круговым шлицем, как показано на рисунке 11. вращающийся вал Poligon Shaft выполняет роль генератора волн с многоугольным периметром (Schreiber and Röthlingshöfer, 2017). Таким образом, несколько отдельных зубьев входят в зацепление с круговым шлицем одновременно, как и в Harmonic Drive. Это, вместе с высокоустойчивым к крутящему моменту двухточечным контактом между каждым отдельным зубом и держателем зубов, обеспечивает этому устройству характерный нулевой люфт, высокую жесткость на кручение и эталонную способность отношения крутящего момента к весу, по словам производителя.
Рисунок 11 . Деталь зацепления зубьев коробки передач Galaxy (R) DF адаптирована из Schreiber (2015) с разрешения © 2020 Wittenstein Galaxie GmbH. Он включает схему базовой топологии KHV.
В прямом обмене представители Wittenstein подтвердили, что очевидная проблема трения между отдельными зубьями и их направляющим круглым кольцом решена, и Galaxie может достигать пиковой эффективности более 90%. Из-за лежащей в его основе конфигурации KHV ожидаются большие коэффициенты скрытой мощности, но пока невозможно получить более глубокое представление об эффективности зацепления, которое будет результатом радиального перемещения зубьев, которое включает в себя новую логарифмическую спиральную боковую поверхность зуба (Michel, 2015).
Первоначально Galaxie Drive предназначался для точного машиностроения, где высокая жесткость и сопротивление крутящему моменту могут помочь увеличить скорость и повысить производительность. В будущем мы, безусловно, сможем оценить потенциал этой инновационной технологии и для роботизированных приложений.
Обсуждение
Новое поколение робототехнических устройств меняет приоритеты в выборе адекватных коробок передач. Вместо предельной точности на высоких скоростях к этим устройствам предъявляются более строгие требования с точки зрения легкости и очень эффективных механических устройств усиления.
Сверхлегкие тензоволновые приводы (HD, E-cyclo), безусловно, в очень хорошем состоянии для удовлетворения этих потребностей, что подтверждается их нынешним доминированием в области коботов. При рассмотрении волнового привода для роботизированной задачи pHRI работа при низких крутящих моментах и скоростях должна быть сведена к минимуму, если требуется максимизировать эффективность. Хотя их оптимизированная геометрия зубьев способствует более линейной жесткости на кручение, трение остается сильно нелинейным и зависит от направления, что также накладывает определенные ограничения на использование. Храповой механизм вследствие ударной нагрузки является еще одним ограничением, которое следует учитывать для коробки передач этого типа, чего не должно быть у E-Cyclo (SUMITOMO, 2020).
Циклоидные приводы прошли долгий путь, прежде чем в конечном итоге стали доминирующей технологией в промышленных роботах. Благодаря технологическим достижениям, направленным на улучшение ограничений по люфту и входной скорости, теперь они могут обеспечивать хорошую точность с приемлемой эффективностью, несмотря на высокие коэффициенты скрытой мощности, возникающие в результате базовой топологии KHV, эквивалентной топологии волновых приводов. Использование ступени предварительного зубчатого зацепления также вносит важный вклад в достижение этой цели за счет повышения базовой топологической эффективности. Сверхлегкие конструкции, такие как у SPINEA, демонстрируют интересный потенциал, но в конечном итоге потребуются более революционные подходы, такие как пластиковые материалы, чтобы удовлетворить потребности в более легких коробках передач и больших передаточных числах, необходимых для HRI. Пока это не станет возможным, циклоидные приводы можно рассматривать только для больших полезных нагрузок, когда их больший вес и результирующая инерция не являются критическими для работы. Когда предельная точность не требуется, мер по компенсации люфта можно избежать в пользу повышения эффективности и снижения пусковых моментов. В любом случае следует позаботиться о том, чтобы адекватно справляться с пульсациями крутящего момента, и, возможно, потребуется оставить предварительную ступень редуктора, чтобы обеспечить высокие входные скорости двигателя.
Невозможность планетарных редукторов уменьшить люфт при сохранении хорошей производительности и ограниченная жесткость на кручение ограничивают их использование в промышленной робототехнике. Тем не менее, PGT чрезвычайно универсальны, о чем свидетельствует их широкое использование во многих современных промышленных устройствах. И они по своей природе эффективны, надежны и относительно просты — дешевы — в производстве. Это может объяснить недавний интерес робототехников к PGT, а также то, почему пять из шести изученных здесь инновационных редукторов основаны на конфигурации PGT с высоким передаточным числом: топологии Wolfrom. Многообещающими характеристиками являются лучшая топологическая эффективность в сочетании с улучшением эффективности зацепления за счет модификации профиля или еще один шаг вперед, заключающийся в замене зубьев роликовыми контактами. В сочетании с возможностями, открываемыми их полой топологией, эти элементы потенциально могут привести к возвращению PGT в робототехнику.
Наше исследование показывает, что большая универсальность технологий редукторов, используемых в робототехнике, представляет собой серьезную проблему для прямого сравнения их характеристик. Как показывают примеры люфта и максимальной входной скорости, адекватные модификации конструкции могут соответствующим образом компенсировать большинство первоначальных слабых мест определенной технологии за счет компромиссов в других аспектах, обычно включая эффективность, размер, вес и стоимость. Точно так же большие коэффициенты скрытой мощности указывают на значительный топологический недостаток с точки зрения эффективности, но его также можно — по крайней мере частично — компенсировать соответствующими модификациями. Таким образом, эффект обучения заключается в том, что выбор подходящей технологии редуктора для определенного применения pHRI является чрезвычайно сложным процессом, требующим глубокого понимания основных недостатков, возможностей улучшения и производных компромиссов каждой технологии. Следовательно, наша первоначальная цель исследования, заключающаяся в том, чтобы внести вклад в простую таблицу выбора, способную помочь неопытным инженерам-робототехникам в выборе подходящих технологий редукторов для их роботизированных устройств, не может быть достигнута. Вместо этого в этом документе собраны и объяснены основные параметры выбора и связанные с ними проблемы в каждой из доступных технологий, чтобы помочь инженерам-робототехникам pHRI развить необходимые навыки, необходимые для осознанного выбора подходящей, индивидуально оптимизированной коробки передач.
Два важных аспекта роботизированных редукторов для pHRI, к сожалению, не могут быть адекватно оценены в нашем исследовании на данном этапе: шум и стоимость. По мере того, как роботизированные устройства приближаются к человеку, шум привлекает все больше внимания робототехников. Редукторы, безусловно, представляют собой важный источник шума (воздушного и структурного), но, к сожалению, два основных ограничения рекомендуют исключить шум из нашего анализа на данном этапе. Во-первых, большинство производителей коробок передач еще не предоставляют количественные оценки шумовых характеристик, а когда они это делают, они склонны следовать другим методам испытаний, которые также не особенно подходят для условий эксплуатации в pHRI. Во-вторых, современные технологии коробок передач все еще должны пройти процесс оптимизации шума.
Стоимость также является важным параметром, позволяющим сделать технологии pHRI более доступными, и поэтому она становится важной для выбора подходящих редукторов для будущих робототехнических технологий. К сожалению, и здесь научному сообществу недоступна недостаточная справочная информация, чтобы можно было систематически и справедливо оценивать крупномасштабный стоимостной потенциал определенной технологии редукторов. Прежде чем можно будет определить подходящую основу для оценки этого потенциала, требуется большой объем исследовательской работы, которая явно выходит за рамки нашего исследования.
Эти два ограничения определяют основные рекомендации авторов для интересных будущих направлений исследований. Определение стандартных условий испытаний на воздушный и структурный шум в коробках передач, особенно адаптированных к типичным условиям эксплуатации и потребности в pHRI, могло бы позволить провести прямое сравнение различных технологий и способствовать их оптимизации шума. Кроме того, компиляция доступных моделей затрат для производственных процессов, связанных с производством редукторов, и их адаптация к особенностям конкретных технологий, используемых в робототехнике, позволили бы составить основу для оценки крупномасштабного стоимостного потенциала (и барьеров) различные технологии.
Вклад авторов
Все авторы участвовали в предварительной работе, связанной с этой темой исследования, и внесли свой вклад в концептуализацию структуры, представленной в рукописи. PG работал над созданием подходящей системы оценки для проведения анализа редуктора и взял на себя инициативу в написании рукописи и придании ей текущей формы. PG и ES в равной степени способствовали выявлению потенциально подходящих технологий и их анализу с помощью фреймворка. Все авторы прочитали корректуру и внесли свой вклад в окончательную версию статьи.
Финансирование
SC, ES (докторская степень SB) и TV (постдокторская степень SB) являются научными сотрудниками Исследовательского фонда Фландрии — Fonds voor Wetenschappelijk Onderzoek (FWO). Эта работа частично финансировалась исследовательской и инновационной программой Horizon 2020 Европейского Союза в рамках соглашения о гранте № 687662 — проект SPEXOR.
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Авторы благодарят профессора Ясутаку Фудзимото из Йокогамского национального университета, а также компании Neugart GmbH, Harmonic Drive SE, Sumitomo Drive Germany GmbH, Genesis Robotics, Innovative Mechatronic Systems B.V., Stam s.r.l. и Wittenstein Galaxy GmbH за любезную поддержку и разъяснения, а также за предоставление нам разрешения на использование прилагаемых изображений их устройств.
Дополнительный материал
Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/frobt.2020.00103/full#supplementary-material
Ссылки
Albu-Schäffer, A. , Eiberger, O., Grebenstein, M., Haddadin, S., Ott, C., Wimbock, T., et al. (2008). Мягкая робототехника. Робот IEEE. автомат. Маг. 15, 20–30. doi: 10.1109/MRA.2008.9
Полный текст CrossRef | Google Scholar
Arigoni, R., Cognigni, E., Musolesi, M., Gorla, C., and Concli, F. (2010). «Планетарные редукторы: эффективность, люфт, жесткость» в VDI International Conference on Gears (Мюнхен).
Google Scholar
Арнаудов К. и Караиванов Д. (2005). «Высшие составные планетарные зубчатые передачи» в Международная конференция VDI по зубчатым передачам , Vol. 1904 г. (Мюнхен: VDI-Bericht), 327–344.
Барбагелата, А., и Корсини, Р. (2000). Riduttore Ingranaggi Conici Basculanti . Патент Италии № IT SV20000049A1. Рим: Ufficio Italiano Brevetti e Marchi.
Барбагелата, А., Эллеро, С., и Ландо, Р. (2016). Планетарный редуктор . Европейский патент № EP2975296A2. Мюнхен: Европейское патентное ведомство.
Брасситос, Э. , и Джалили, Н. (2017). Проектирование и разработка малогабаритного высокомоментного роботизированного привода для космических механизмов. Дж. Мех. Робот. 9, 061002-1–061002-11. doi: 10.1115/1.4037567
Полный текст CrossRef | Google Scholar
Брасситос, Э., и Джалили, Н. (2018). «Определение характеристик жесткости, трения и кинематических ошибок в трансмиссиях с зубчатыми подшипниками», в ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference 9.0549 (Квебек: цифровая коллекция Американского общества инженеров-механиков). doi: 10.1115/DETC2018-85647
Полный текст CrossRef | Google Scholar
Brassitos, E., Mavroidis, C., and Weinberg, B. (2013). «Привод с зубчатым подшипником: новый компактный привод для роботизированных соединений», в ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Портленд, Орегон: цифровая коллекция Американского общества инженеров-механиков). doi: 10.1115/DETC2013-13461
Полнотекстовая перекрестная ссылка | Google Scholar
Брасситос Э., Вайнберг Б., Цинчао К. и Мавроидис К. (2019). Контактная система изогнутых подшипников . Патент США № US10174810B2. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Каланка А., Мурадоре Р. и Фиорини П. (2015). Обзор алгоритмов податливого управления роботами с жесткой и фиксированной податливостью. IEEE/ASME Trans. мех. 21, 613–624. doi: 10.1109/ТМЕЧ.2015.2465849
Полнотекстовая перекрестная ссылка | Google Scholar
Карбоун Г., Мангиаларди Л. и Мантриота Г. (2004). Сравнение характеристик полных и полутороидальных тяговых приводов. Мех. Мах. Теория 39, 921–942. doi: 10.1016/j.mechmachtheory.2004.04.003
CrossRef Полный текст | Академия Google
CAxMan (2020). х3020 проекта 680448 Евросоюза. Презентация варианта использования 1: NuGear . Доступно в Интернете по адресу: https://www. caxman.eu/en/use-cases/nugear/ (по состоянию на 30 апреля 2020 г.).
Сетинкунт, С. (1991). Вопросы оптимального проектирования в высокоскоростных высокоточных сервосистемах движения. Мехатроника 1, 187–201. doi: 10.1016/0957-4158(91)
-ACrossRef Полный текст | Google Scholar
Чен К. и Анхелес Дж. (2006). Поток виртуальной мощности и механические потери мощности в планетарных зубчатых передачах. ASME J. Мех. Дес. 129, 107–113. doi: 10.1115/1.2359473
Полный текст CrossRef | Google Scholar
Чен Д. З. и Цай Л. В. (1993). Кинематический и динамический синтез зубчатых робототехнических механизмов. Дж. Мех. Дес. 115, 241–246. doi: 10.1115/1.2
3
Полный текст CrossRef | Google Scholar
Криспель С., Лопес-Гарсия П., Верстратен Т., Конвенс Б., Саренс Э., Вандерборхт Б. и Лефебер Д. (2018). «Представляем составные планетарные шестерни (C-PGT): компактный способ достижения высоких передаточных чисел для носимых роботов», в International Symposium on Wearable Robotics (Пиза), 485–489. дои: 10.1007/978-3-030-01887-0_94
CrossRef Полный текст | Google Scholar
Де Сантис, А., Сицилиано, Б., Де Лука, А., и Бикки, А. (2008). Атлас физического взаимодействия человека и робота. Мех. Мах. Теория 43, 253–270. doi: 10.1016/j.mechmachtheory.2007.03.003
CrossRef Полный текст | Google Scholar
Дель Кастильо, Дж. М. (2002). Аналитическое выражение КПД планетарных зубчатых передач. Мех. Мах. Теория 37, 197–214. дои: 10.1016/S0094-114X(01)00077-5
Полнотекстовая перекрестная ссылка | Google Scholar
Дрессчер Д., де Врис Т. Дж. и Страмиджиоли С. (2016). «Выбор мотор-редуктора для повышения энергоэффективности», в Международная конференция IEEE по усовершенствованной интеллектуальной мехатронике (AIM) 2016 г. (Банф, AB: IEEE), 669–675. doi: 10.1109/AIM.2016.7576845
Полный текст CrossRef | Google Scholar
Фудзимото, Ю. (2015). Планетарная передача и метод ее проектирования . Патент Японии № JP2015164100. Токио: Патентное ведомство Японии.
Фудзимото Ю. и Кобусе Д. (2017). «Роботизированные приводы с высоким обратным ходом», на Международном семинаре IEEJ по обнаружению, срабатыванию, управлению движением и оптимизации (SAMCON) (Нагаока), IS2–1.
ГАМ (2020). Волновой редуктор GSL . Каталог.
ГЕНЕЗИС (2018). Усилитель крутящего момента Reflex — залог будущего движения . Техническое обновление Общение.
GENESIS Robotics (2020). Радиальный ДВИГАТЕЛЬ LiveDrive® [брошюра] . Доступно в Интернете по адресу: https://genesisrobotics.com/products/livedrive-radial-motor/ (по состоянию на 30 апреля 2020 г.).
Гиберти, Х., Чинквемани, С., и Леньяни, Г. (2010). Влияние механических характеристик трансмиссии на выбор мотор-редуктора. Мехатроника 20, 604–610. doi: 10.1016/j.mechatronics.2010.06.006
CrossRef Полный текст | Google Scholar
Жирар, А., и Асада, Х. Х. (2017). Использование динамики естественной нагрузки с приводами с переменным передаточным числом. Робот IEEE. автомат. лат. 2, 741–748. doi: 10.1109/LRA.2017.2651946
Полный текст CrossRef | Академия Google
Горла, К., Даволи, П., Роза, Ф., Лонгони, К., Киоцци, Ф., и Самарани, А. (2008). Теоретический и экспериментальный анализ циклоидного редуктора. Дж. Мех. Дес. 130:112604. doi: 10.1115/1.2978342
Полный текст CrossRef | Google Scholar
Groothuis, S.S., Folkertsma, G.A., and Stramigioli, S. (2018). Общий подход к достижению стабильности и безопасного поведения в распределенных роботизированных архитектурах. Фронт. Робот. АИ 5:108. дои: 10.3389/frobt.2018.00108
CrossRef Полный текст | Google Scholar
Хаддадин С., Альбу-Шеффер А. и Хирцингер Г. (2009). Требования к безопасным роботам: измерения, анализ и новые идеи. Междунар. Дж. Робот. Рез , 28, 1507–1527. doi: 10.1177/0278364
3970
CrossRef Full Text | Google Scholar
Хаддадин С. и Крофт Э. (2016). «Физическое взаимодействие человека и робота», в Springer Handbook of Robotics (Cham: Springer), 1835–1874. дои: 10.1007/978-3-319-32552-1_69
Полный текст CrossRef | Google Scholar
HALODI Robotics (2018). МОТОР ПРЯМОГО ПРИВОДА Revo1™ [брошюра], Moss. Доступно в Интернете по адресу: https://www.halodi.com/revo1 (по состоянию на 30 апреля 2020 г.).
Хэм, Р. В., Шугар, Т. Г., Вандерборхт, Б., Холландер, К. В., и Лефебер, Д. (2009). Совместимые конструкции приводов. Робот IEEE. автомат. Маг. 16, 81–94. doi: 10.1109/MRA.2009.9
Полный текст CrossRef | Академия Google
Harmonic Drive A.G. (2014) Технические данные Наборы компонентов CSD-2A . Каталог.
Хлебаня Г. и Куловец С. (2015). «Разработка плоскоцентрической коробки передач на основе S-образной геометрии», в 11. Kolloquium Getriebetechnik (Мюнхен), 205–216.
Google Scholar
Хоган, Н. (1984). «Контроль импеданса: подход к манипулированию», , 1984 г., Американская конференция по управлению, (Сан-Диего, Калифорния: IEEE), 304–313. doi: 10.23919/ACC.1984.4788393
Полнотекстовая перекрестная ссылка | Google Scholar
Хори К. и Хаяши И. (1994). Максимальная эффективность традиционных механических парадоксальных планетарных передач для редуктора. Пер. Япония. соц. мех. англ. 60, 3940–3947. doi: 10.1299/kikaic.60.3940
CrossRef Full Text
Hunter, I.W., Hollerbach, J.M., and Ballantyne, J. (1991). Сравнительный анализ приводных технологий для робототехники. Робот. Ред. 2, 299–342.
Google Scholar
IMSystems (2019). Архимед Драйв. IMSystems—Drive Innovation [брошюра], Делфт.
Икбал, Дж., Цагаракис, Н.Г., и Колдуэлл, Д.Г. (2011). «Проектирование носимого оптимизированного ручного экзоскелета с прямым приводом», в Международной конференции по достижениям в области компьютерно-человеческих взаимодействий (ACHI) (Gosier).
Реферат PubMed | Google Scholar
Канаи Ю. и Фудзимото Ю. (2018). «Управление без датчика крутящего момента для экзоскелета с электроприводом с использованием приводов с сильным обратным ходом», в IECON 2018–44 Ежегодная конференция Общества промышленной электроники IEEE (Вашингтон, округ Колумбия: IEEE), 5116–5121. doi: 10.1109/IECON.2018.85
CrossRef Полный текст | Google Scholar
Капелевич А. и AKGears LLC (2013). Анализ планетарных приводов с высоким передаточным числом. Ratio 3, 10.
Google Scholar
Караяннидис Ю., Друкас Л., Папагеоргиу Д. и Доулгери З. (2015). Управление роботом для выполнения задач и повышения безопасности при ударе. Фронт. Робот. АИ 2:34. doi: 10.3389/frobt.2015.00034
Полный текст CrossRef | Google Scholar
Кашири Н., Абате А., Абрам С. Дж., Альбу-Шаффер А., Клэри П. Дж., Дейли М. и др. (2018). Обзор принципов энергоэффективного движения роботов. Фронт. Робот. АИ 5:129. doi: 10.3389/frobt.2018.00129
Полный текст CrossRef | Google Scholar
Kim, J., Park, F.C., Park, Y., and Shizuo, M. (2002). Проектирование и расчет сферической бесступенчатой трансмиссии. Дж. Мех. Дез . 124, 21–29. doi: 10.1115/1.1436487
Полный текст CrossRef | Google Scholar
Классен, Дж. Б. (2019). Дифференциальный планетарный редуктор . Международный патент № WO2019/051614A1. Женева: Всемирная организация интеллектуальной собственности, Международное бюро.
Google Scholar
Коряков-Савойский Б., Алексахин И., Власов И. П. (1996). Система передач . Патент США № US5505668A. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Ли, С. (2014). «Новейшие технологии проектирования зубчатых передач с большими передаточными числами», в Proceedings of International Gear Conference (Lyon), 427–436. doi: 10.1533/9781782421955.427
Полный текст CrossRef | Google Scholar
Луман, Дж. (1996). Zahnradgetriebe (редукторные механизмы) . Берлин: Springer-Verlag. doi: 10.1007/978-3-540-89460-5
CrossRef Полный текст
Лопес-Гарсия П., Криспел С., Верстратен Т., Саеренс Э., Конвенс Б., Вандерборхт Б. ., и Лефебер, Д. (2018). «Проектирование планетарного редуктора для активной носимой робототехники на основе анализа видов и последствий отказов (FMEA)», в Международный симпозиум по носимой робототехнике (Пиза), 460–464. doi: 10.1007/978-3-030-01887-0_89
Полный текст CrossRef | Google Scholar
Лопес-Гарсия П., Криспель С., Верстратен Т., Саренс Э., Вандерборхт Б. и Лефебер Д. (2019a). «Коробки передач Wolfrom для легкой робототехники, ориентированной на человека», в материалах Proceedings of the International Conference on Gears 2019 (Мюнхен: VDI), 753–764.
Лопес-Гарсия П., Криспель С., Верстратен Т., Саренс Э., Вандерборхт Б. и Лефебер Д. (2019 г.б). «Настройка планетарных зубчатых передач для помощи и воспроизведения человеческих конечностей», в MATEC Web of Conferences (Варна: EDP Sciences), 01014. doi: 10.1051/matecconf/201
CrossRef Полный текст | Google Scholar
Лафлин К., Альбу-Шеффер А., Хаддадин С., Отт К., Стеммер А., Вимбок Т. и Хирцингер Г. (2007). Легкий робот DLR: концепции проектирования и управления роботами в среде человека. Индивидуальный робот. Междунар. Дж . 34, 376–385. дои: 10.1108/014390774386
Полнотекстовая перекрестная ссылка | Google Scholar
Макмиллан Р. Х. и Дэвис П. Б. (1965). Аналитическое исследование систем разветвленной передачи мощности. Дж. Мех. англ. Наука . 7, 40–47. doi: 10.1243/JMES_JOUR_1965_007_009_02
Полный текст CrossRef | Google Scholar
Майр, К. (1989). Präzisions-Getriebe für die Automation: Grundlagen und Anwendungsbeispiele . Ландсберг: Verlag Moderne Industrie.
Мишель, С. (2015). Эволюция логарифмической спирали. Машиненмаркт № . 18, 40–42.
Михайлидис, А., Атанасопулос, Э., и Оккас, Э. (2014). «Эффективность циклоидного редуктора», International Gear Conference (Lyon Villeurbanne), 794–803. doi: 10.1533/9781782421955.794
Полный текст CrossRef | Google Scholar
Морозуми, М. (1970). Эвольвентное внутреннее зацепление со смещенным профилем . Патент США № US3546972A. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Mueller, HW (1998). Die Umlaufgetriebe: Auslegung und vielseitige Anwendungen . Берлин; Гейдельберг: Springer-Verlag. doi: 10.1007/978-3-642-58725-2
Полный текст CrossRef | Google Scholar
Мульцер, Ф. (2010). Systematik hoch übersetzender koaxialer getriebe (Докторская диссертация). Технический университет Мюнхена, Мюнхен, Германия.
Google Scholar
Musser, CW (1955). Волновая передача . Патент США № US23А. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
НАБТЕСКО (2018). Прецизионный редуктор RV — серия N . Кат.180410. Каталог.
Нойгарт, А. Г. (2020). PLE Economy Line . Каталог.
Ниманн, Г., Винтер, Х., и Хён, Б. Р. (1975). Maschinenelemente, Vol. 1 . Берлин; Гейдельберг; Нью-Йорк, штат Нью-Йорк: Спрингер.
Google Scholar
Паш, К. А., и Сиринг, В. П. (1983). «О приводных системах высокопроизводительных машин», в Машиностроение (Нью-Йорк, штат Нью-Йорк: Общество машиностроения ASME-AMER), 107–107.
Пеннестри, Э., и Фройденштейн, Ф. (1993). Механический КПД планетарных зубчатых передач. ASME J. Мех. Дез . 115, 645–651. doi: 10.1115/1.2
9Полный текст CrossRef | Google Scholar
Петтерссон, М., и Олвандер, Дж. (2009). Оптимизация трансмиссии промышленных роботов. IEEE Trans. Робот. 25, 1419–1424. дои: 10.1109/TRO.2009.2028764
Полнотекстовая перекрестная ссылка | Google Scholar
Фам, А. Д., и Ан, Х. Дж. (2018). Высокоточные редукторы для промышленных роботов, ведущие к четвертой промышленной революции: современное состояние, анализ, проектирование, оценка производительности и перспективы. Междунар. Дж. Точность. англ. Произв. Зеленая технология. 5, 519–533. doi: 10.1007/s40684-018-0058-x
CrossRef Full Text | Google Scholar
Резазаде С. и Херст Дж. В. (2014). «Об оптимальном выборе двигателей и трансмиссий для электромеханических и робототехнических систем», в Международная конференция IEEE/RSJ по интеллектуальным роботам и системам, 2014 г. (Чикаго, Иллинойс: IEEE), 4605–4611. doi: 10.1109/IROS.2014.6
5
Полный текст CrossRef | Google Scholar
Роос Ф., Йоханссон Х. и Викандер Дж. (2006). Оптимальный выбор двигателя и редуктора в мехатронных приложениях. Мехатроника 16, 63–72. doi: 10.1016/j.mechatronics.2005.08.001
CrossRef Полный текст | Google Scholar
Розенбауэр, Т. (1995). Getriebe für Industrieroboter: Beurteilungskriterien . Kenndaten, Einsatzhinweise: Shaker.
Россман, А. М. (1934). Механический механизм . Патент США № US1970251. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Саренс Э., Криспель С., Гарсия П. Л., Верстратен Т., Дукастель В., Вандерборхт Б. и Лефебер Д. (2019). Законы масштабирования для роботизированных трансмиссий. Мех. Мах. Теория 140, 601–621. doi: 10.1016/j.mechmachtheory.2019.06.027
CrossRef Полный текст | Академия Google
Шафер И., Бурлье П. , Ханчак Ф., Робертс Э. У., Льюис С. Д., Форстер Д. Дж. и Джон К. (2005). «Космическая смазка и характеристики гармонических приводных механизмов», 11-й Европейский симпозиум по космическим механизмам и трибологии, ESMATS 2005 (Люцерн), 65–72.
Google Scholar
Шейнман В., Маккарти Дж. М. и Сонг Дж. Б. (2016). «Механизм и приведение в действие», в Springer Handbook of Robotics (Cham: Springer), 67–90. дои: 10.1007/978-3-319-32552-1_4
CrossRef Полный текст | Google Scholar
Шемпф, Х. (1990). Сравнительный анализ проектирования, моделирования и управления трансмиссиями роботов (кандидатская диссертация). № ВОЗИ-90-43. Департамент машиностроения и Океанографический институт Вудс-Хоул, Массачусетский технологический институт, Кембридж, Массачусетс, США. doi: 10.1575/1912/5431
Полный текст CrossRef | Google Scholar
Шемпф, Х., и Йоргер, Д. Р. (1993). Исследование доминирующих рабочих характеристик трансмиссий роботов. ASME J. Мех. Дес. 115, 472–482. doi: 10.1115/1.24
Полный текст CrossRef | Google Scholar
Шорш, Дж. Ф. (2014). Составной планетарный фрикционный привод . Патент Нидерландов № 2013496. Де Хааг: Octrooicentrum Nederland.
Google Scholar
Шрайбер, Х. (2015). «Revolutionäres getriebeprinzip durch neuinterpretation von maschinenelementen — Die WITTENSTEIN Galaxie®-Kinematik», in Dresdner Maschinenelemente Kolloquium, DMK (Дрезден), 2015.С.
Шрайбер, Х., и Рётлингсхёфер, Т. (2017). «Кинематическая классификация редуктора с отдельными упорными зубьями и ее преимущества по сравнению с существующими подходами», Международная конференция по зубчатым колесам , ICG (Мюнхен).
Шрайбер, Х., и Шмидт, М. (2015). Гетрибе. Патент Германии № DE 10 2015 105 525 A1. Мюнхен: Deutsches Patent- und Markenamt.
Google Scholar
Sensinger, JW (2010). «Выбор двигателей для роботов с использованием биомиметических траекторий: оптимальные ориентиры, обмотки и другие соображения», в Международная конференция IEEE по робототехнике и автоматизации 2010 г. (Анкоридж, AK: IEEE), 4175–4181. doi: 10.1109/ROBOT.2010.5509620
CrossRef Full Text | Google Scholar
Sensinger, JW (2013). КПД высокочувствительных зубчатых передач, таких как циклоидные приводы. ASME J. Мех. Дес. 135, 071006-1–071006-9. doi: 10.1115/1.4024370
Полный текст CrossRef | Google Scholar
Сенсингер Дж. В., Кларк С. Д. и Шорш Дж. Ф. (2011). «Внешние и внутренние роторы в бесщеточных двигателях роботов», в Международная конференция IEEE по робототехнике и автоматизации 2011 г. (Монреаль, КК: IEEE), 2764–2770. doi: 10.1109/ICRA.2011.5979940
Полный текст CrossRef | Google Scholar
Сок С., Ван А., Чуах М.Ю.М., Хюн Д.Дж., Ли Дж., Оттен Д.М. и др. (2014). Принципы проектирования энергоэффективного передвижения на ногах и их реализация на роботе-гепарде Массачусетского технологического института. IEEE/ASME Trans. мех. 20, 1117–1129. doi: 10.1109/TMECH.2014.2339013
CrossRef Full Text | Академия Google
Сицилиано Б. , Шавикко Л., Виллани Л. и Ориоло Г. (2010). Робототехника: моделирование, планирование и управление . Лондон: Springer Science and Business Media. doi: 10.1007/978-1-84628-642-1
Полный текст CrossRef | Google Scholar
Слэттер, Р. (2000). Weiterentwicklung eines Präzisionsgetriebes für die Robotik . Сент-Леонард: Antriebstechnik.
Google Scholar
SPARC (2015). Многолетняя дорожная карта Robotics 2020 для робототехники в Европе Horizon 2020 Call ICT-2017 . Доступно в Интернете по адресу: https://www.eu-robotics.net/sparc/about/roadmap/index.html (по состоянию на 30 апреля 2020 г.).
СПИНЕА (2017). TwinSpin — Высокоточные редукторы — Präzisionsgetriebe . Каталог.
Страмиджиоли, С., ван Оорт, Г., и Дертьен, Э. (2008). «Концепция нового энергоэффективного привода», в Международная конференция IEEE/ASME по усовершенствованной интеллектуальной мехатронике, 2008 г., (Сиань: IEEE), 671–675. doi: 10.1109/AIM. 2008.4601740
Полный текст CrossRef | Академия Google
СУМИТОМО (2017). Fine Cyclo® Spielfreie Prezisionsgetriebe . Каталог 9
DE 02/2017.СУМИТОМО (2020). Приводы управления движением E-Cyclo®. Каталог F10001E-1.
Талбот, Д., и Кахраман, А. (2014). «Методология прогнозирования потерь мощности в планетарных передачах», в International Gear Conference (Lyon-Villeurbanne), 26–28. doi: 10.1533/9781782421955.625
CrossRef Full Text
Tomcyk, H. (2000). Регулировочное устройство с планетарными передачами . Европейский патент № EP1244880B1. Мюнхен: Европейское патентное ведомство.
Google Scholar
Toxiri, S., Näf, M.B., Lazzaroni, M., Fernández, J., Sposito, M., Poliero, T., et al. (2019). «Экзоскелеты для поддержки спины для профессионального использования: обзор технологических достижений и тенденций», в IISE Trans. Занять. Эргон. Гум. Факторы 7, 3–4, 237–249. doi: 10.1080/24725838.2019.1626303
CrossRef Полный текст | Google Scholar
Van de Straete, H. J., Degezelle, P., De Schutter, J. и Belmans, R.J. (1998). Критерий выбора серводвигателя для мехатронных приложений. IEEE/ASME Trans. мех. 3, 43–50. doi: 10.1109/3516.662867
CrossRef Полный текст | Google Scholar
Veale, AJ, and Xie, SQ (2016). На пути к совместимым и носимым роботизированным ортезам: обзор текущих и новых технологий приводов. Мед. англ. физ. 38, 317–325. doi: 10.1016/j.medengphy.2016.01.010
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Верстратен Т., Фурнемон Р., Матийссен Г., Вандерборхт Б. и Лефебер Д. (2016). «Потребление энергии редукторными двигателями постоянного тока в динамических приложениях: сравнение подходов к моделированию», в Робот IEEE. автомат. лат. 1, 524–530. doi: 10.1109/LRA.2016.2517820
Полный текст CrossRef | Google Scholar
Враниш, Дж. М. (1995). Бескаркасный планетарный привод с защитой от люфта . Патент США № US5409431. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Враниш, Дж. М. (2006). Подшипники с частичным зубчатым зацеплением . Патент США № US2006/0219039A1. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Ван А. и Ким С. (2015). «Эффективность направления в зубчатых трансмиссиях: характеристика обратного движения для улучшения проприоцептивного контроля», в Международная конференция IEEE по робототехнике и автоматизации (ICRA) , 2015 г. (Сиэтл, Вашингтон: IEEE), 1055–1062. doi: 10.1109/ICRA.2015.7139307
Полный текст CrossRef | Google Scholar
Вайнберг Б., Мавроидис К. и Враниш Дж. М. (2008). Подшипник шестерни привода . Патент США № US2008/0045374A1. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Исследование WinterGreen (2018). Прецизионные редукторы с волновым редуктором и редукторы RV и RD: доля рынка, стратегия и прогнозы в мире, 2018–2024 гг. WIN0418002.
WITTENSTEIN AG (2020). Технические брошюры SP+ и TP+ Getrieben. Каталог.
Вольф, А. (1958). Die Grundgesetze der Umlaufgetriebe . Брауншвейг: Фридр. Видег и Зон.
Вольфром, У. (1912). Der Wirkungsgrad von Planetenrädergetrieben. Werkstattstechnik 6, 615–617.
Ю Д. и Бичли Н. (1985). О механическом КПД дифференциальной передачи. ASME J. Мех. Транс. автомат. 107, 61–67. doi: 10.1115/1.3258696
Полный текст CrossRef | Google Scholar
Зинн М., Рот Б., Хатиб О. и Солсбери Дж. К. (2004). Новый подход к управлению роботом, удобным для человека. Междунар. Дж. Робот. Рез. 23, 379–398. doi: 10.1177/0278364
2193
Полный текст CrossRef | Академия Google
Компактные редукторы для современной робототехники: обзор
- Список журналов
- Передний робот ИИ
- т. 7; 2020
- PMC7806062
Передний робот ИИ. 2020; 7: 103.
Published online 2020 Aug 14. doi: 10.3389/frobt.2020.00103
, 1, 2, * , 1, 2 , 1, 2 , 1, 2 и 1, 2
Информация об авторе Примечания к статье Информация об авторских правах и лицензии Отказ от ответственности
- Дополнительные материалы
роботизированных устройств HRI остается сильно обусловленным их коробками передач. В большинстве промышленных роботов обычно встречаются две относительно нетрадиционные технологии передачи — Harmonic Drives© и Cycloid Drives, которые не так широко используются в других отраслях. Понимание происхождения этой сингулярности дает ценную информацию для поиска подходящих будущих технологий роботизированной трансмиссии. В этой статье мы предлагаем структуру оценки, строго обусловленную приложениями HRI, и используем ее для обзора производительности традиционных и новых технологий роботизированных коробок передач, для которых критерий проектирования сильно смещен в сторону таких аспектов, как вес и эффективность. Структура предлагает использовать виртуальную мощность в качестве подходящего способа оценки внутренних ограничений технологий редукторов для достижения высокой эффективности. Эта статья дополняет существующие исследования, посвященные сложному взаимодействию между технологиями редукторов и приводов, новой перспективой, ориентированной на редукторы, в частности, на приложения HRI.
Ключевые слова: трансмиссии, редукторы, HRI, эффективность, виртуальная мощность, гармонический привод, циклоидные приводы
Промышленные роботы составляют основу нескольких крупных традиционных производственных отраслей, включая автомобилестроение и электронику. Сегодня многие регионы мира видят реальную возможность возродить обрабатывающую промышленность, внедряющую роботов на малых и средних предприятиях (МСП) и в вспомогательных службах, как правило, в здравоохранении (SPARC, 2015).
Для крупномасштабных, высокоавтоматизированных промышленных сред преимущество роботизированных решений по сравнению с операторами-людьми в основном заключается в (i) большей доступности и (ii) способности перемещать — обычно большие — полезные нагрузки с исключительной точностью позиционирования и на высокой скорости. . Эти аспекты имеют ключевое значение при разработке и выборе подходящих технологий для промышленного робота, особенно для первичных двигателей и трансмиссий, обеспечивающих движение этих устройств.
Применение в производстве малого и среднего бизнеса и персональный помощник бросают вызов этой традиционной парадигме робототехники. Ключ к успеху этих новых приложений заключается в очень высокой степени гибкости, необходимой для обеспечения безопасного и эффективного прямого сотрудничества с людьми для достижения общих целей. Эта цель требует, чтобы роботы сначала развили способность безопасно взаимодействовать с людьми в дисциплине, обычно называемой pHRI — физическое взаимодействие человека и робота.
pHRI оказывает широкое влияние на работу роботов. Опыт, накопленный за последние десятилетия, в основном в медицинской робототехнике, свидетельствует о том, что для безопасного и эффективного взаимодействия с человеком роботы должны в основном двигаться как люди, тем самым жертвуя некоторыми из своих традиционных преимуществ с точки зрения полезной нагрузки, точности и скорости. Эта ситуация привела к обильным исследованиям в последние годы, посвященным оптимальному выбору первичных двигателей и трансмиссий для приведения в действие HRI (Zinn et al., 2004; Ham et al., 2009).; Икбал и др., 2011; Вейл и Се, 2016 г.; Верстратен и др., 2016; Groothuis и др., 2018; Саеренс и др., 2019).
Эти работы относятся к более широкой области исследований, изучающих оптимизацию сцепления между первичным двигателем и коробкой передач для данной задачи в автоматических машинах. Краткий обзор основных достижений в этой области дает полезную информацию для понимания влияния редуктора на общую производительность системы. Паш и Сиринг (1983) определили важность инерции при срабатывании и предложили использовать передаточное отношение, соответствующее инерции двигателя и отраженной нагрузки, как средство минимизации потребления энергии для чисто инерционной нагрузки. Чен и Цай (1993) применил эту идею к области робототехники и определил результирующую способность к ускорению рабочего органа как определяющий параметр. Ван де Стрэте и др. (1998) разделили характеристики двигателя и нагрузки, чтобы распространить этот подход на общую нагрузку, и предложили метод определения подходящих передаточных чисел для дискретного набора двигателей и редукторов. Роос и др. (2006) изучали оптимальный выбор привода для силовых агрегатов электромобилей с учетом эффективности коробки передач. Гиберти и др. (2010) подтверждают инерцию ротора, передаточное отношение, эффективность редуктора и инерцию редуктора как наиболее важные параметры для выбора срабатывания и предлагают графический метод для оптимизации этого выбора для динамической задачи. Петтерссон и Олвандер (2009 г.)) снова сосредоточился на промышленных роботах и представил метод, который моделирует коробку передач с сильным акцентом на массу, инерцию и трение. Резазаде и Херст (2014) используют очень точную модель двигателя и включают фундаментальный критерий выбора полосы пропускания в дополнение к минимизации энергии. Дрессчер и др. (2016) исследуют вклад трения в планетарную коробку передач, в которой кулоновское трение является доминирующим механизмом трения, и демонстрируют, как эффективность коробки передач обычно становится доминирующей над эффективностью двигателя при высоких передаточных числах трансмиссии.
Начиная с первоначальных моделей редукторов, использованных в этих работах, где редукторы моделируются как идеальные передаточные числа, сложность моделей постепенно возрастала. Тем не менее, необходимо сделать важные — и нереалистичные — упрощения, чтобы добиться хорошей практической применимости этих методов. Таким образом, важные эффекты, такие как жесткость при кручении и потери движения, не учитываются, а модели инерции и эффективности редуктора сильно упрощены. Это оправданный подход для многих приложений, где упрощенные методы могут помочь инженерам выбрать подходящие трансмиссии. Однако в HRI эти свойства слишком важны для пригодности коробки передач, и их нельзя так сильно упростить.
Поэтому требуется другой подход, чтобы предоставить полезные рекомендации по выбору редуктора в HRI, избегая чрезмерной сложности задач оптимизации в этой области. Предоставление подробной информации об эксплуатационных свойствах и характеристиках различных технологий редукторов для обоснованного выбора является еще одним вариантом, следуя традициям таких работ, как Schempf and Yoerger (1993) или Rosenbauer (1995). Следуя этому подходу, Siciliano et al. (2010), Ли (2014), Шейнман и др. (2016), а также Фам и Ан (2018) представляют интересные обзоры высокоточных редукторов для современной робототехники. Однако технологии не проанализированы достаточно подробно, чтобы получить хорошее представление о сложных механизмах, в которых они влияют на выполнение роботизированной задачи.
Основная цель этого обзора состоит в том, чтобы последовательно дополнить эти работы подробным анализом основных принципов, сильных сторон и ограничений доступных технологий. Помимо прогнозирования будущего технологий коробок передач в робототехнике, этот подход может помочь неспециалистам по коробкам передач определить подходящие технологии компактных коробок передач для многофакторных требований новых роботизированных приложений (López-García et al., 2018). Специалистам по коробкам передач из других областей этот анализ может помочь получить полезную информацию о конкретных потребностях приложений HRI.
Это исследование начинается с краткого описания основных требований к будущим роботизированным трансмиссиям, чтобы затем представить структуру оценки, предназначенную для оценки пригодности и потенциала конкретной технологии коробки передач для этой области. Эта структура включает в себя сильную перспективу pHRI и включает новый параметр — коэффициент скрытой мощности — для оценки внутренней эффективности определенной топологии редуктора. Эта новая структура используется в первую очередь для обзора традиционных технологий редукторов, используемых в промышленных роботах, и новых технологий трансмиссии, которые в настоящее время находятся в процессе выхода на рынок. Наконец, в конце документа приводится краткое изложение выводов, полученных в результате этого обзора, вместе с нашими выводами и рекомендациями.
Управление
Управление робототехническими устройствами — очень широкая и сложная тема, предмет обширной исследовательской литературы. В этом разделе мы ограничимся введением основных принципов линейности и отраженной инерции, которые являются основными для понимания влияния редуктора на управление.
Хотя в целом скорость и точность являются противоречивыми требованиями, обычные роботизированные устройства превосходно достигают высокой точности позиционирования на высокой скорости благодаря использованию жестких приводов с очень линейным поведением (Cetinkunt, 19).91). Включение роботизированной трансмиссии влияет на сложность управления в основном двумя способами: введение дополнительных нелинейностей и сильное влияние на отраженные инерции.
Нелинейности, возникающие при включении трансмиссии, принимают в основном форму люфта и/или трения и уменьшают полосу пропускания системы, создавая серьезные проблемы управления (Schempf, 1990). Заявление о шестернях приводит к люфту, трению и (нежелательному) податливости, что затрудняет точное управление (Hunter et al., 1991) сегодня так же актуален, как и почти 30 лет назад. Для некоторых технологий большие погрешности кинематической передачи и особенно нелинейные характеристики трения также могут вызывать значительную нелинейность.
Передачи также сильно влияют на отраженную инерцию системы. В роботизированном устройстве инерция первичного двигателя обычно на несколько порядков меньше, чем у полезной нагрузки, что делает систему нестабильной и создает серьезные проблемы с управлением. Добавление трансмиссии сильно снижает инерцию полезной нагрузки, видимой первичным двигателем и отражаемой им, на коэффициент, равный квадрату коэффициента уменьшения трансмиссии. Таким образом, тщательный выбор трансмиссии может привести к более сбалансированной инерции с обеих сторон трансмиссии, способствуя минимизации энергопотребления и созданию более надежной, стабильной и точной системы (Pasch and Seering, 19).83).
Отраженная инерция особенно важна, когда рабочие органы подвергаются быстрым и частым изменениям скорости и/или крутящего момента, что является очень распространенной ситуацией в задачах автоматизации и робототехники. В этих случаях вводится перспектива пропускной способности, чтобы подтвердить способность системы следовать этим изменениям (Sensinger, 2010; Rezazadeh and Hurst, 2014). Это лежит в основе принципа обратной управляемости, способности системы демонстрировать низкий механический импеданс, когда она приводится в действие от ее естественного выхода (обратная управляемость). Это особенно важно при частом двунаправленном обмене энергией между роботом и его пользователем, характерном для реабилитационных устройств или экзоскелетов. Как показывают Ван и Ким (2015), способность редуктора к обратному ходу включает комбинированный эффект отраженной инерции, отраженного демпфирования и кулоновского трения, и поэтому она тесно связана с эффективностью редуктора.
Это подчеркивает важность для оценки управляющего воздействия определенной технологии коробки передач как ее передаточных чисел, так и нелинейностей (люфт, трение), которые она вносит.
Безопасность
Промышленные роботы традиционно размещаются за ограждениями в высоко структурированных средах, где они могут воспользоваться преимуществами своих быстрых и точных роботизированных движений, не ставя под угрозу целостность людей-операторов.
Безопасный pHRI, включающий возможность безопасного перемещения в неструктурированной/неизвестной среде, обязательно тесно связан с управляемостью. Текущая стратегия, используемая робототехниками для достижения этой цели, состоит из , формируя механический импеданс (Calanca et al., 2015), то есть позволяя контроллеру соответствия управлять сложным динамическим соотношением между положением/скоростью робота и внешними силами (Hogan, 1984).
Принцип прост: чтобы обеспечить хорошую адаптацию к неопределенной среде, а также целостность человека-оператора/пользователя во время взаимодействия с роботизированным устройством, последний должен двигаться податливым, человекоподобным образом (Караяннидис и др., 2015). Это подчеркивает важность импеданса и внутренней податливости (De Santis et al., 2008) и объясняет появление нового типа внутренне гибких приводов для pHRI (Ham et al., 2009).), где желательно высокое соблюдение требований (Хаддадин и Крофт, 2016).
С точки зрения управления инерция полезной нагрузки, отражаемая на первичный двигатель, уменьшается на коэффициент, соответствующий квадрату передаточного числа. Таким же образом обычно малая инерция ротора первичного двигателя усиливается этим же коэффициентом при отражении со стороны полезной нагрузки, которая должна быть добавлена к инерции, возникающей в результате движения роботизированного устройства и груза, по соображениям безопасности, далее ограничение рабочих скоростей.
Хотя сегодня в большинстве приводов pHRI используются редукторы с высоким передаточным числом, некоторые известные робототехники Seok et al. (2014), Sensinger et al. (2011) видят большой потенциал для робототехники в использовании двигателей с высоким крутящим моментом (out-runner), требующих очень малых передаточных чисел. Новые производители робототехнических решений, такие как Genesis Robotics из Канады или Halodi Robotics AS из Норвегии, предлагают приводы для робототехники, основанные на этих принципах. По их словам, увеличение инерции двигателя и уменьшение передаточного числа должно привести к снижению инерции двигателя, отражаемой на рабочий орган, что позволит увеличить рабочие скорости и/или полезную нагрузку без ущерба для целостности оператора. Низкие передаточные числа также имеют дополнительное преимущество в пропускной способности: они имеют более низкое трение и люфт, уменьшая вклад коробки передач в нелинейность. С другой стороны, умеренное передаточное число не может компенсировать нелинейные условия сцепления — обычно зубчатый крутящий момент (Siciliano et al. , 2010).
При более внимательном рассмотрении спецификаций этих новых двигателей возникают некоторые вопросы с точки зрения достижимой эффективности, веса или компактности, а также последствий для оборудования, возникающих в результате крайней жажды высоких электрических токов (HALODI Robotics, 2018; GENESIS Robotics, 2020) .
Подводя итог, можно сказать, что нет единого мнения о том, как лучше всего подойти к безопасному запуску робототехники. Тем не менее, тесные естественные связи между безопасностью и управляемостью столь же очевидны, как и ключевое значение передаточного числа трансмиссии и ее нелинейности.
Вес и компактность
Легкая конструкция имеет первостепенное значение для обеспечения совместимости безопасности и хороших характеристик в приложениях новой робототехники (Albu-Schäffer et al., 2008). Новейшие коллаборативные роботы (коботы), такие как легкий робот KUKA, разработанный в сотрудничестве с Институтом робототехники и мехатроники Немецкого аэрокосмического центра (DLR), основаны на этом принципе и, следовательно, сильно отличаются от тяжелых и громоздких традиционных промышленных роботов. Благодаря более низкой инерции легкие коботы обеспечивают более высокую производительность и более высокие скорости без ущерба для безопасности пользователя.
Этот выгодный аспект легкой конструкции имеет дополнительные преимущества. Для мобильных роботизированных систем меньший вес означает большую автономию. В носимых вспомогательных роботизированных устройствах, включая протезы и экзоскелеты, легкая конструкция также является ключевым аспектом повышения комфорта (Toxiri et al., 2019).
Высокая компактность — еще одна характерная черта, присущая этим новым робототехническим устройствам: от коботов до вспомогательных устройств. Компактность дает преимущества в маневренности и комфорте взаимодействия.
В роботизированных приложениях, связанных с тесным взаимодействием с людьми или предоставлением мобильных услуг, позиции по своей природе крайне неопределенны. Легкие и компактные конструкции особенно выгодны (Loughlin et al., 2007) для этих приложений с двумя последствиями: первичные двигатели и трансмиссии — как правило, самые тяжелые элементы в роботизированном устройстве — должны быть легкими и компактными, но легкие конструкции, как правило, требуют более низких крутящих моментов.
В отличие от веса редуктора определение подходящего критерия для оценки вклада редуктора в компактность системы является более сложной задачей. Физический объем определенно играет роль, но наш опыт показывает, что фактическая форма коробки передач имеет большее значение. Еще один аспект, о котором стоит упомянуть, это наличие в некоторых конфигурациях редукторов свободного пространства для размещения материала или движущихся частей, таких как электродвигатели или выходные подшипники, которые также могут представлять особый интерес. Поэтому мы решили включить в нашу систему оценки приблизительную форму (диаметр × длина) выбранного редуктора, в то время как наличие дополнительного пространства можно непосредственно оценить с помощью предоставленных цифр каждой из конфигураций.
Эффективность и виртуальная мощность
Эффективность
В таких областях, как автомобилестроение или ветряные турбины, эффективность редукторов уже давно находится в центре внимания. С другой стороны, в робототехнике эффективность до недавнего времени не становилась ключевым параметром при выборе подходящей коробки передач (Arigoni et al., 2010; Dresscher et al., 2016).
Более высокая эффективность — более низкие потери — позволяют снизить потребление энергии и вносят непосредственный положительный вклад как в эксплуатационные расходы, так и в воздействие машины или устройства на окружающую среду. Для мобильных и носимых роботизированных устройств более высокая эффективность помогает также снизить вес системы — требуются батареи меньшего размера — и в конечном итоге приводит к большей автономности и удобству использования (Kashiri et al., 2018).
В редукторах есть еще одно преимущество в снижении потерь: большинство механических трансмиссий, используемых в робототехнике, являются замкнутыми и используют контакт зубьев для передачи крутящего момента и движения между первичным двигателем и рабочим органом. Благодаря этому кинематическое соотношение между входной ω In и выходной скоростью ω Out фиксируется числом зубьев и определяет его передаточное отношение i K . В редукторе без потерь отношение крутящего момента i τ между выходным и входным крутящими моментами τ точно соответствует обратному кинематическому передаточному числу с противоположным знаком. Но в реальной коробке передач наличие потерь изменяет это равенство, а так как кинематическое передаточное число запирается числом зубьев, то абсолютная величина передаточного числа должна уменьшаться пропорционально потерям:
ωInωOut= iK=- η iτ=-ητOutτIn;где η представляет эффективность системы.
Следовательно, высокие потери в редукторе означают, что меньший крутящий момент доступен для рабочего органа, и для достижения того же усиления крутящего момента требуются более высокие передаточные отношения.
Коробки передач подвержены нескольким типам потерь. Для их классификации мы принимаем критерии, предложенные Talbot и Kahraman (2014), и разделяем их на зависящие от нагрузки (механические) потери мощности, возникающие в результате скольжения и качения контактных поверхностей как в контактах шестерен, так и в подшипниках, и — независимые (спиновые) потери мощности — возникающие при взаимодействии вращающихся компонентов с воздухом, маслом или их смесью.
Виртуальная мощность
Термин «Виртуальная мощность» был, насколько известно авторам, первоначально придуман Ченом и Анхелесом (2006), но это явление, объясняющее аномально высокие потери, присутствующие в некоторых планетарных топологиях, было известно в течение длительного времени при разные имена в том числе Blindleistung (Wolf, 1958; Mueller, 1998) и латентная или бесполезная сила (Macmillan and Davies, 1965; Yu and Beachley, 1985; Pennestri and Freudenstein, 1993; Del Castillo, 2002).
Коробка передач по своему принципу действия всегда включает в себя высокоскоростную сторону с низким крутящим моментом и сторону с высоким крутящим моментом и низкой скоростью. Таким образом, его внутренние зубчатые зацепления обычно работают в условиях высокого крутящего момента и низкой скорости или в условиях высокой скорости и низкого крутящего момента. Однако в некоторых коробках передач из-за их специфической топологии некоторые зубчатые зацепления могут одновременно сталкиваться с высокой скоростью и большим крутящим моментом. Зубчатые зацепления могут легко достигать эффективности выше 98%, но поскольку генерируемые потери приблизительно пропорциональны произведению относительной скорости двух зубчатых элементов и крутящего момента, передаваемого через зацепление (Niemann et al., 1975), в этих высоконагруженных зацеплениях возникают неожиданно большие потери. . Виртуальная мощность обеспечивает основу для оценки вклада этого явления, которое мы далее будем называть топологической эффективностью коробки передач.
Некоторые из вышеупомянутых авторов предлагают методы оценки топологической эффективности данной конфигурации и определения ее влияния на общую эффективность системы. В рамках Чена и Анхелеса (2006), виртуальная мощность определяется как мощность, измеренная в движущейся — неинерциальной — системе отсчета. Скрытая мощность , введенная Ю и Бичли (1985), соответственно соответствует виртуальной мощности, когда система отсчета является несущим элементом коробки передач, а коэффициент виртуальной мощности представляет собой отношение между виртуальной мощностью и мощностью, генерируемой внешним крутящим моментом. применяется по ссылке. Используя эти элементы, мы определяем коэффициент скрытой мощности топологии редуктора как отношение суммы скрытых мощностей во всех зацеплениях к мощности, подводимой к редуктору. Таким образом, большой коэффициент скрытой мощности соответствует низкой топологической эффективности и указывает на сильную тенденцию генерировать большие потери при зацеплении.
Чтобы облегчить понимание практического влияния на общую эффективность топологического КПД, характеризуемого коэффициентом скрытой мощности, данной конфигурации редуктора, мы используем на этом этапе уравнения, предложенные Макмилланом и Дэвисом (1965) для расчета упрощенный пример.
Полный редуктор робототехники обычно включает в себя несколько зацепляющих контактов, каждый из которых имеет разные рабочие условия и параметры, что приводит к различной эффективности зацепления. Эти КПД очень высоки в оптимизированных зубчатых зацеплениях — часто выше 99 % — и позволяет нам упростить наши расчеты, учитывая общую уникальную эффективность зацепления η 91 441 92 487 м 92 488 91 442 = 99 % во всех контактах зацепления в нашей коробке передач.
Во-первых, эталонный редуктор, идеальный с точки зрения топологической эффективности, должен иметь только одно зацепление и коэффициент скрытой мощности L = 1. Таким образом, потери мощности внутри этого эталонного редуктора можно легко рассчитать как функцию входного мощность как:
Ploss= PIN * (1-ηm)
Таким образом, общая эффективность зацепления всего редуктора соответствует эффективности одиночного зацепляющего контакта:
ηsys,ideal= PIN-PLossPIN=ηm=99%;
Неидеальный редуктор с одним и тем же общим η m во всех его зацеплениях и с коэффициентом скрытой мощности L, характеризующим его топологический КПД, показывает, что полные потери в редукторе могут быть аппроксимированы в первую очередь как:
Ploss, L≈ PIN* L *(1-ηm)
И общая эффективность зацепления всего редуктора становится теперь:
ηsys,L= PIN-PLoss,LPIN≈L * ηm+(1-L)
Что для η m = 99% и для значения L = 50 дает:
3
3
3
3
L≈ 50%
Этот результат должен быть частично относительным, потому что накопленные потери в первых зацеплениях, задействованных в различных потоках внутренней мощности в редукторе, приводят к тому, что меньшая виртуальная мощность, как предсказывается этими уравнениями, будет проходить через последующие зацепления. Результатом этого является то, что эффективность обычно падает немного медленнее при использовании коэффициента скрытой мощности, и более реалистичное значение для предыдущего расчета обычно составляет от 55 до 60%.
Чтобы частично компенсировать это большое влияние топологической эффективности на общую эффективность, конфигурации с большим коэффициентом скрытой мощности требуют чрезвычайно высокой эффективности сетки: для достижения эффективности системы >70% система с L = 100 нуждается в средней эффективности сетки КПД выше 99,5%.
Поэтому в нашем дальнейшем анализе мы сосредоточимся только на оценке вклада топологической эффективности в эффективность редуктора. Это позволяет нам использовать упрощенный метод для расчета коэффициента скрытой мощности, который в первую очередь не учитывает влияние потерь, вызванных снижением крутящего момента. Соответствующие расчеты, использованные для определения коэффициента скрытой мощности различных конфигураций коробки передач, проанализированных в этой работе, включены в Приложение I.
Подводя итог, чтобы охарактеризовать важное влияние КПД редуктора, мы оценим порядок величины трех параметров: (i) потери, зависящие от нагрузки, (ii) пусковой момент без нагрузки и (iii) коэффициент скрытой мощности. Хотя на него дополнительно влияет статическое трение, а не только кулоновское и вязкое трение, мы выбрали пусковой крутящий момент без нагрузки (относительно номинального крутящего момента) в качестве практического способа характеристики потерь, не зависящих от нагрузки. Наш обмен мнениями с производителями редукторов показывает, что это обычная практика, она не зависит от входной мощности и легко доступна в паспорте производителя.
Производительность
По сравнению со специальными и автоматическими сборочными машинами промышленные роботы не могут достичь таких же стандартов точности и скорости. Оба аспекта должны были быть скомпрометированы, чтобы обеспечить большую степень гибкости и мобильности, а также рабочего пространства (Rosenbauer, 1995). С этой точки зрения, HRI — это еще один шаг в том же направлении: чтобы удовлетворить дальнейшие потребности в гибкости и мобильности в неструктурированной среде, необходимы дополнительные компромиссы с точки зрения точности и скорости. Этот переход отражен в .
Открыть в отдельном окне
Графическое описание перехода основных задач от машин через промышленных роботов и коботов к людям-операторам.
Точность и воспроизводимость
Несколько аспектов редуктора влияют на итоговую общую точность всего роботизированного устройства. Эти аспекты долгое время находились в центре внимания традиционной робототехники и сегодня хорошо изучены благодаря работам Майра (1989), Шемпфа и Йоргера (19).93) или Rosenbauer (1995), предоставляя очень хорошие ссылки для понимания этих сложных влияний. Эти исследования определяют особенно важную роль потери движения и жесткости при кручении.
Lost Motion — это дальнейшее развитие принципа люфта, который описывает полное вращательное смещение, создаваемое приложением ±3% от номинального входного крутящего момента.
Жесткость при кручении характеризует податливость к кручению всех элементов коробки передач, участвующих в полном потоке сил, под действием внешнего крутящего момента. Он устанавливается путем блокировки входа редуктора и постепенного увеличения крутящего момента на выходе, при этом регистрируются изменения жесткости на кручение, приводящие к отклонениям от идеально линейного поведения.
Точность по своей природе — малые потери движения и линейность, высокая жесткость на кручение — редукторы упрощают задачу управления и обеспечивают высокую точность, идеально подходящие для управления положением, в то время как менее точные редукторы усложняют управление положением и могут использоваться для более податливых срабатывание. В технологиях редукторов, где скорость оказывает сильное влияние на потери или особенно нелинейные характеристики трения, необходимо также учитывать вклад этих элементов в точность.
Чтобы охарактеризовать возможности точности, наша структура включает потери движения и жесткость на кручение вместе с субъективной оценкой изменения эффективности, вызванного изменениями скорости/крутящего момента.
Скорость и полезная нагрузка
Промышленные роботы могут обрабатывать большие полезные нагрузки за счет большой инерции. С другой стороны, для коботов соображения безопасности подразумевают, что они не должны справляться с такой большой полезной нагрузкой, но благодаря более легкой конструкции они могут фактически достичь большего соотношения полезной нагрузки к весу.
Соображения безопасности также ограничивают возможности использования этого снижения массы для увеличения рабочих скоростей (Haddadin et al., 2009). Тем не менее, более низкие крутящие моменты способствуют использованию более легких и быстрых электродвигателей, что в принципе требует более высоких передаточных чисел для этих применений.
Критерий для характеристики вклада редуктора в характеристики скорости и полезной нагрузки должен отражать эти аспекты и побуждать нас использовать в нашей структуре (i) максимальную входную скорость, (ii) максимальный повторяемый выходной крутящий момент — называемый ускоряющим крутящим моментом — и номинальный крутящий момент, ( iii) передаточное отношение и (iv) отношение крутящего момента к весу как для номинального, так и для ускоряющего крутящего момента.
Резюме
Характеристика роботизированных коробок передач является сложной задачей: высокая универсальность этих устройств и их сложное взаимодействие с первичными двигателями и системами управления делают прямое сравнение их характеристик особенно сложным.
Передаточное отношение оказывает сильное влияние на производительность роботизированной системы. Это объясняет его предпочтительную роль в литературе, посвященной оптимизации срабатывания роботов, и растущий интерес робототехников к возможностям использования регулируемых трансмиссий (Kim et al., 2002; Carbone et al., 2004; Stramigioli et al., 2008; Girard). и Асада, 2017). Хотя мы убеждены, что переменные трансмиссии очень перспективны и, безусловно, будут способствовать формированию будущего ландшафта робототехники, мы ограничили наш анализ здесь компактными коробками передач с постоянным передаточным числом. На данный момент мы считаем, что нам лучше всего подходит этот ограниченный объем, который на самом деле может также способствовать выявлению потенциальных областей применения и подходящих технологий для трансмиссий с переменным передаточным числом.
На основе этого анализа мы предлагаем систему оценки будущих роботизированных коробок передач на основе следующих параметров:
Передаточное отношение
Ускорение и номинальный выходной крутящий момент
2 Вес
3 9 × Длина
Ускорение и номинальный крутящий момент к массе
Эффективность: пиковое значение и субъективная зависимость от условий скорости и крутящего момента
Топологическая эффективность: коэффициент латентной мощности
Без нагрузки и запускные крутящие крутящие трубы в % от номинального входного крутящего момента
Нагрузки.
Жесткость при кручении
Наша структура также включает эталонный вариант использования, репрезентативный для нескольких задач pHRI согласно нашему собственному опыту: крутящий момент ускорения более 100 Нм и передаточное число более 1:100, для которых вес, компактность и эффективность должна быть оптимизирована.
Электрические двигатели, оснащенные механическими трансмиссиями, обычно выбираются в качестве приводов в робототехнике (Rosenbauer, 1995; Scheinman et al., 2016), а также в промышленных роботах. Эти механические трансмиссии почти неизбежно основаны на какой-либо зубчатой технологии (Sensinger, 2013).
Благодаря их большей способности снижать общий вес, а также тому, что электродвигатели, как правило, имеют более высокий КПД при высоких рабочих скоростях, еще одной характеристикой промышленных роботизированных трансмиссий является использование относительно больших коэффициентов передачи (передаточных чисел), обычно превышающих 1: 40 (Розенбауэр, 1995).
Планетарные редукторы: чрезвычайно универсальная платформа
Планетарные зубчатые передачи (PGT) — это компактные, очень универсальные устройства, широко используемые в силовых передачах. Благодаря своей характерной коаксиальной конфигурации и хорошей удельной мощности они особенно подходят для вращательных первичных двигателей, таких как электрические двигатели.
PGT могут использовать две дифференцированные стратегии для достижения высокого коэффициента усиления: (i) добавление нескольких ступеней обычных, высокоэффективных PGT — здесь называемых редукторами и представленных в — или (ii) использование особенно компактных конфигураций PGT с возможностью создания высокой передачи отношения.
Открыть в отдельном окне
Внутреннее устройство редуктора Neugart с указанием его основных элементов, адаптировано из Neugart (2020) с разрешения © Neugart GmbH. Он включает также схему лежащей в его основе топологии.
Несмотря на то, что использование нескольких ступеней редуктора обеспечивает наилучшее использование высокой эффективности зацепления шестерен и приводит к созданию высокоэффективных редукторов, это обычно приводит к тяжелым и громоздким решениям. С другой стороны, компактные конфигурации PGT могут достигать высоких передаточных чисел в очень компактных формах, но они страдают от неожиданно высоких потерь, связанных с высокой виртуальной мощностью (Crispel et al. , 2018).
Особо компактная конфигурация PGT для высоких передаточных чисел была впервые изобретена Вольфромом (1912 г.) и использовалась в редукторах серии RE компании ZF Friedrichshafen AG (ZF), предназначенных для применения в промышленных роботах (Looman, 1996 г.). На эту конфигурацию, показанную далее, сильно влияет Virtual Power, и ZF представляет собой единственное известное коммерческое применение конфигураций PGT, отличных от обычных редукторов. Хотя производство серии RE было прекращено в 90-х годах, PGT Wolfrom в последнее время вызывают растущий интерес сообщества исследователей робототехники, как мы резюмировали в предыдущей статье авторов (López-García et al., 2019).а).
Открыть в отдельном окне
Внутреннее устройство ZF серии RG Wolfrom PGT для применения в робототехнике адаптировано из Looman (1996) с разрешения © 1998 Springer-Verlag Berlin Heidelberg. Он включает также схему лежащей в его основе топологии.
представляет оценку PGT. Несмотря на то, что размеры PGT RG350 Wolfrom компании ZF завышены для нашего эталона, мы использовали PGT ZF, чтобы попытаться оценить потенциал конфигураций PGT с высоким передаточным отношением, основываясь на существующих доказательствах его пригодности для достижения высоких передаточных чисел (Арнаудов и Караиванов, 2005; Мульцер, 2010). ; Капелевич и AKGears LLC, 2013). Для редукторов мы выбрали — при поддержке производителей — подходящие решения из портфолио Wittenstein и Neugart. Стоит отметить важную роль, которую играет максимальное передаточное отношение на ступень в редукторе: в то время как Wittenstein ближе к максимально возможному, учитывая предотвращение контакта между соседними планетами, Neugart выбирает в своей серии PLE (серия PLFE может достигать 1:100). соотношения только в двух каскадах) более строгий подход и, следовательно, требует трех каскадов вместо двух для Виттенштейна, чтобы достичь общего усиления 1:100. Это приводит к менее компактным решениям и более низкой эффективности для приложения 1:100, но позволяет компании Neugart достигать более высоких коэффициентов усиления — до 1:512 — без фундаментальных изменений в весе, размере или эффективности.
Таблица 1
Схема оценки решений планетарной передачи.
| PGTs | WITTENSTEIN (2020)—Alpha SP+075MF | Neugart (2020)—PLE 080 | Looman (1996) ZF—RG350 |
|---|---|---|---|
| Передаточное число | 1:100 (2 ступени) | 1:100 (3 ступени) | 1:−76 (2 ступени) |
| Ускорение/номинальные моменты | 105/84 Nm | 192/120 Nm | 500 * /350 Nm |
| Weight | 3 kg | 3. 1 kg | 6.4 kg |
| Shape | Φ95 × L120 mm | φ80 × L168 мм | φ160 × L90 мм |
| Отношения TOUPT-WEEL-WEEL и субъективная зависимость от условий эксплуатации | 94 % — низкая (скорость и крутящий момент) | 92 %, низкая (скорость и крутящий момент) | 84 %, низкая (скорость и крутящий момент) |
| Коэффициент скрытой мощности (раздел/-ы Приложения I, включая Расчеты) | 3,6 (GH, SGH) | 4,7 (GH, SGH) | 36,8 (WG) |
| NO-DOAD TROUTE | 0,5% * | ||
| Потери, не зависящие от нагрузки | 5.5% | 7.5% | 14.5% |
| Lost motion | 4–6 Arcmin | <11 Arcmin | () |
| Maximum input speed | 8,500 rpm | 7,000 rpm | 5,000 Организации |
| Торсионная жесткость | 10 нм/аркмин | 8 нм/аркмин | () |
Открыть в отдельном окне
0
. в Приложении I .
Редукторы весят около 4 кг, что нельзя напрямую сравнивать с увеличенным RG350. RG350 имеет форму большего диаметра и меньшей длины, чем редукторы. С точки зрения отношения крутящего момента к весу значения обоих решений кажутся относительно близкими.
Редукторы имеют большое преимущество в их хорошем КПД (более 90%), которые также менее чувствительны к изменениям условий эксплуатации, а пусковые моменты на холостом ходу очень низкие. Конфигурации с высоким коэффициентом показывают, как сильное ограничение топологической эффективности приводит к снижению эффективности. Это, вероятно, объясняет, почему зубчатые передачи сегодня являются доминирующей технологией PGT в робототехнике.
PGT показывают самые высокие входные скорости (до 8500 об/мин), но их потери движения также самые большие (4–6 угловых минут) в обычных коробках передач. В робототехнике PGT широко использовались в первых промышленных роботах, в то время как в последние десятилетия их использование сильно сократилось, в основном из-за их ограничений по уменьшению люфта. Хотя существуют механизмы, ограничивающие изначально больший люфт PGT, они практически основаны на введении определенной предварительной нагрузки, что отрицательно сказывается на их эффективности (Schempf, 19).90).
Harmonic Drives: легкий волновой редуктор с нулевым люфтом
Волновой редуктор был изобретен Musser (1955) и нашел широкое применение в 70-х годах, первоначально в аэрокосмической отрасли. Его основное космическое применение было в качестве механического элемента трансмиссии в луноходе Аполлона-15 в 1971 году (Schafer et al., 2005).
Его название связано с характерной деформацией его Flexspline , нежесткой тонкой цилиндрической чашки с зубьями, которая служит выходом. Flexspline входит в зацепление с фиксированным сплошным круглым кольцом с внутренними зубьями шестерни, Круговой сплайн , в то время как он деформируется вращающейся эллиптической пробкой — Генератор волн , как это видно на . Этот тип редуктора чаще всего называют Harmonic Drive© (HD) из-за очень эффективной стратегии защиты IP.
Открыть в отдельном окне
Внутренняя конфигурация коробки передач Harmonic Drive CSG (слева), адаптированная из Harmonic Drive (2014) с разрешения © 2019 Harmonic Drive SE, и коробка передач E-Cyclo (справа), адаптированная из SUMITOMO ( 2020) с разрешения © 2020 Sumitomo Drive Germany GmbH. Также включена схема лежащей в их основе топологии KHV, которая использовалась для расчета коэффициента скрытой мощности в Приложении I.
Для сравнительного анализа мы выбрали два подходящих редуктора Harmonic Drive: CSD-25-2A, предназначенный для интеграции в роботизированный шарнир для обеспечения адекватных структурных граничных условий, и сверхлегкий редуктор CSG-25-LW, представляющий собой конструктивно достаточное решение. , что можно более непосредственно сравнить с другими технологиями. Совсем недавно SUMITOMO представила новый редуктор E-CYCLO, также основанный на волновом принципе действия. SUMITOMO предоставила нам доступ к своему последнему каталогу (SUMITOMO, 2020), что позволило нам включить его в наш тест (). Еще одна интересная волна напряжения, очень похожая на Harmonic Drive, недавно была представлена компанией GAM в серии роботизированных коробок передач, которая также включает в себя планетарные зубчатые передачи и циклоидные приводы (GAM, 2020).
Таблица 2
Схема оценки решений для волн деформации.
| Джамб. (2020) E—CYCLO | ||||||
|---|---|---|---|---|---|---|
| Передаточное отношение | 1:100 | 1:100 | 1:100 | 9768 Мин.0046123/47 Nm | 204/87 Nm | 157/67 Nm |
| Weight | (0. 24 kg) a | 1.1 kg | 1.6 kg | |||
| Shape | (Φ85 × L20 mm) a | Φ107 × L52 mm | Φ95 × L58 mm | |||
| Torque-to-weight ratios | (500/195 Nm/kg) a | 208/79 Nm/kg | 98/42 Нм/кг | |||
| Эффективность и субъективная зависимость от условий эксплуатации | 75 %, высокая (скорость и крутящий момент) | 84 %, высокая (скорость и крутящий момент) | 70 %, высокая (скорость и крутящий момент) | |||
| Коэффициент скрытой мощности | 101 (ПО) | 017 (6 1017 (6 927) SW)101 (PC) | ||||
| Пусковой момент без нагрузки (прямое и обратное направление) | 17/20% | 10/13% | 45%/() | |||
| 22 % при 500 об/мин, ном. крутящий момент | 18 % при 500 об/мин, ном. крутящий момент | 30 % при 500 об/мин, ном. torque | ||||
| Lost motion | <1 Arcmin | <1 Arcmin | <1 Arcmin | |||
| Maximum input speed | 7,500 rpm | 7,500 rpm | 6,500 rpm | |||
| Torsional rigidity | 9 –17 Нм/угл.мин | 9–17 Нм/угл. мин | 11–16 Нм/угл.мин |
Открыть в отдельном окне
* 9248 я .
a – эти значения относятся к устройству, не подходящему в качестве отдельной коробки передач, для которого требуется дополнительная конструктивная поддержка, непосредственно влияющая на идентифицированные характеристики, обеспечиваемая роботизированным устройством, в которое оно встроено .
Выбранная модель CSG имеет значительно больший крутящий момент, чем указано в нашем эталонном тесте. Форма характеризуется большими диаметрами, чем длинами, а вес значительно ниже, чем у других технологий, и приводит к лучшим отношениям крутящего момента к весу среди анализируемых технологий. Действительно, характерное зацепление с несколькими зубьями обеспечивает большее сопротивление крутящему моменту, чем в PGT, что делает эту технологию очень подходящей для соединений ближе к рабочему столу, где они часто встречаются в современных промышленных роботах.
Пиковый КПД ниже, чем у редукторов, и ближе к RG350, а КПД особенно чувствителен к условиям эксплуатации. Поезда Strain Wave демонстрируют большие независимые от нагрузки потери и пусковые моменты без нагрузки, особенно в условиях обратного движения, которые становятся особенно важными для высоких скоростей и/или низких крутящих моментов (Harmonic Drive, 2014). Для роботизированных устройств HRI, подверженных частым изменениям скорости и полезной нагрузки в сочетании с обменом энергией между роботизированным устройством и пользователем, это означает, что средняя эффективность быстро падает ниже 40–50% (López-García et al., 2019).б). Заслуживает внимания также их большой коэффициент скрытой мощности, указывающий на одновременное наличие высоких крутящих моментов и скоростей в зацеплениях зубьев, что также помогает объяснить относительно низкий КПД.
Еще раз благодаря зацеплению с несколькими зубьями можно достичь потерь движения менее 1 угловой минуты, что дает этому редуктору сильное преимущество, помогающее Harmonic Drives найти широкое применение в промышленных роботах. Они смогли вытеснить PGT из многих приложений, особенно после значительного улучшения производительности в результате новой геометрии зубьев, представленной этой компанией в 90, что также улучшило линейность жесткости (Slatter, 2000).
В прошлом максимальная входная скорость была серьезным ограничением для использования редукторов HD (Schempf, 1990), но новые усовершенствования и усовершенствования конструкции теперь позволяют им достигать скорости до 7500 об/мин.
Циклоидные приводы: для высокой прочности и жесткости при кручении
С момента изобретения Лоренцем Брареном в 1927 г. (Li, 2014) циклоидные приводы нашли применение в основном в лодках, кранах и некотором крупном оборудовании, таком как поезда для прокатки стальных полос или станки с ЧПУ. . В циклоидных приводах эксцентричное входное движение создает колебательное циклоидальное движение одного большого планетарного колеса, которое затем преобразуется обратно во вращение выходного вала и приводит к высокой редукционной способности (Gorla et al. , 2008), см. .
Открыть в отдельном окне
Внутренняя конфигурация циклоидных приводов SUMITOMO Fine Cyclo F2C-A15 и Fine Cyclo F2C-T155 с указанием основных элементов, адаптировано из SUMITOMO (2017) с разрешения © 2017 Sumitomo Cyclo Drive Germany GmbH. Он включает также схему лежащих в его основе топологий.
включает лидера рынка (NABTESCO RV) в этом сегменте и основных претендентов (SPINEA и SUMITOMO). RV от NABTESCO и серия Fine-Cyclo T от SUMITOMO включают обычную ступень PGT с предварительной передачей. Полезная нагрузка этих устройств больше, чем требуется для нашего теста, и приводит к большому весу. Это уже дает ценную информацию: более компактные решения недоступны на рынке и, согласно информации, предоставленной некоторыми производителями, менее интересны, поскольку требуют предельной точности изготовления и в конечном итоге приводят к высоким затратам.
Таблица 3
Система оценки решений для циклоидального привода.
| CYCLOID drives | NABTESCO (2018)—RV-25N | SPINEA (2017)—TwinSpin TS110 | SUMITOMO (2017)—Fine CYCLO F2C-T155 | SUMITOMO (2017) Fine CYCLO F2C-A15 | |||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Передаточное отношение | 1:108 | 1:119 | 1:118 | 1:89 | |||||||||||||||||||||||||
| Acceleration/nominal torques | 612/245 Nm | 244/122 Nm | 417/167 Nm | 335/111 Nm | |||||||||||||||||||||||||
| Weight | 3. 8 kg | 3.8 kg | 4.8 kg | 2.7 kg | |||||||||||||||||||||||||
| Shape | Φ133 × L62 mm | Φ110 × L62 mm | Φ126 × L68 mm | Φ126 × L60 mm | |||||||||||||||||||||||||
| Torque-to-weight ratios | 161 /64 Нм/кг | 64/32 Нм/кг | 87/29 Нм/кг | 124/41 Нм/кг | |||||||||||||||||||||||||
| КПД и субъективная зависимость от условий эксплуатации | 67 8 904 904 9046 , высокая (скорость и крутящий момент) | 87 %, высокая (скорость), средняя (крутящий момент) | 87 %, высокая (скорость и крутящий момент) | ||||||||||||||||||||||||||
| Коэффициент скрытой мощности | 33,8 *4 (CG)| 29,2 * (КГ) | 90 (ПГ) | NO-загрузка стартового крутящего момента | 16% (@ 500 об/мин) | 19/27% | 23% (@ 500 об/мин) | 64/67% | 68 64/67% | 6868 64/67% | 686868. | % 25% | 13% | 13% | Lost motion | 1 Arcmin | <1 Arcmin | <0.75 Arcmin | <1 Arcmin | Maximum input speed | () | 4500 об/мин | 8,500 rpm | 5,600 rpm | Torsional rigidity | 61 Nm/arcmin | >22 Nm/arcmin | 25–41 Nm/arcmin | 15–28 Nm/arcmin | |
Open in отдельное окно
* Экстраполированные и/или приблизительные значения, см. дополнительную информацию в Приложении I .
Формы аналогичны формам волновых редукторов, а вес больше и ближе к весу PGT по вышеупомянутым причинам. Отношение крутящего момента к весу больше, чем у PGT, но немного ниже, чем у волновых редукторов. Основное преимущество циклоидных приводов заключается именно в их способности выдерживать большие нагрузки, особенно ударные, и в малом объеме технического обслуживания.
Пиковый КПД выше, чем у волновых редукторов, и ближе к КПД PGT, но КПД сильно зависит от условий эксплуатации (Mihailidis et al., 2014), а пусковой момент без нагрузки и коэффициент скрытой мощности высоки, оба похожи на редукторы деформации.
Хотя они, как правило, вызывают некоторый люфт, такой, если его часто компенсируют в их конструкции, чтобы достичь уровней, сравнимых с редукторами с волновой деформацией, вероятно, за счет немного более высокого трения. Их жесткость на кручение является самой большой из проанализированных технологий коробок передач.
Циклоидные приводы имеют врожденное ограничение, связанное с высокими входными скоростями, вызванное наличием большого и относительно тяжелого планетарного (кулачкового) колеса, что приводит к большой инерции и дисбалансу. Это мотивирует использование обычно двух планетарных колес, расположенных последовательно и смещенных на 180 градусов друг к другу, чтобы устранить дисбаланс, уменьшить вибрации и обеспечить более высокие входные скорости. Это объясняет, как благодаря комбинированию циклоидных приводов со ступенями предварительной передачи, состоящими из обычных ступеней PGT, циклоидные приводы получили широкое распространение в робототехнике. Такое расположение повышает эффективность, снижает чувствительность к высоким входным скоростям и обеспечивает легкую адаптацию их передаточных чисел. В 90’s Harmonic Drives доминировали на рынке роботизированных коробок передач, но усовершенствования в циклоидной технологии позволили циклоидным приводам начать завоевывать территорию сначала в Японии, а затем и в других странах (Rosenbauer, 1995). В настоящее время такие производители, как NABTESCO, SUMITOMO или NIDEC, предлагают циклоидные гибриды с предварительной передачей PGT, охватывающие более 60% рынка роботизированных коробок передач, и поэтому они стали новой доминирующей технологией, особенно для проксимальных суставов, подверженных более высоким нагрузкам и меньшим ограничениям по весу (WinterGreen). исследования, 2018).
Наконец, стоит упомянуть наличие относительно большой пульсации крутящего момента, которая вносит нелинейности и усложняет их контроль. Эта пульсация крутящего момента связана с необходимостью использования циклоидных профилей зубьев, чтобы избежать взаимодействия зубьев между большими планетарными колесами и зубчатым венцом, что делает эти устройства чрезвычайно чувствительными к изменениям межосевого расстояния, вызванным даже небольшими производственными ошибками. Существует несколько попыток улучшить эту ситуацию с использованием эвольвентных зубьев — менее чувствительных к изменениям межцентрового расстояния — с уменьшенными углами давления и/или коэффициентами контакта для минимизации радиальных сил и повышения эффективности (Морозуми, 19). 70), а также с использованием других форм неэвольвентных зубов (Коряков-Савойский и др., 1996; Хлебаня, Куловец, 2015).
Усилитель крутящего момента REFLEX
Компания Genesis Robotics привлекла большое внимание робототехнического сообщества выпуском двигателя с прямым приводом LiveDrive © . Согласно Genesis, LiveDrive в двух доступных топологиях — с радиальным и осевым потоками — обеспечивает эталонную производительность по соотношению крутящего момента к весу. Двигатель с осевым потоком может достигать 15 Нм/кг, в то время как радиальный поток ограничен максимум 10 Нм/кг.
Чтобы расширить спектр своего применения, Genesis Robotics представила совместимый редуктор под названием Reflex , который показан на . Этот отлитый под давлением сверхлегкий пластиковый редуктор предназначен для легких роботов, и, хотя он изначально был разработан для работы вместе с LiveDrive и, следовательно, предназначен для передаточных чисел ниже 1:30, он также способен обеспечивать более высокие передаточные числа до 1: 400 (ГЕНЕЗИС, 2018).
Открыть в отдельном окне
Внутренняя конфигурация и основные элементы редуктора Reflex адаптированы из GENESIS Robotics (2020) с разрешения © 2019Генезис Роботикс. Он включает также схему лежащей в его основе топологии.
В основе лежит топология Wolfrom PGT с несколькими меньшими планетами (Klassen, 2019), в которой реактивное (неподвижное) кольцевое зубчатое колесо разделено на две части для целей балансировки в соответствии с конструкцией, первоначально предложенной Россманом (1934) и использованной а также в Hi-Red Gear Tomcyk (2000).
В редукторе Reflex выходное кольцо также разъемное для облегчения сборки со спиральными зубьями. Еще одним интересным аспектом этой конструкции является лентовидная форма сателлитов, которая, по мнению авторов, связана с возможностью предварительного нагружения системы для достижения нулевого люфта, который, как утверждает Genesis, возможен с этой коробкой передач. По словам компании, гибкость пластиковых планетарных колес также способствует уменьшению люфта.
К сожалению, пока недоступны независимые тесты, подтверждающие данные характеристики, и на данный момент нет официальных данных, особенно по эффективности, от Genesis, поэтому включает только значение коэффициента скрытой мощности, полученное из его топологии.
Таблица 4
Схема оценки новых технологий редукторов.
| Новые технологии | GENESIS — усилитель крутящего момента Reflex | IMSystems—archimedes drive | FUJILAB—bilateral drive |
|---|---|---|---|
| Achievable transmission ratios | 1:30 (up to 1:400) | 1:100 (up to 1:500) | 1:96 () |
| Ускорение/номинальное момент | 87/44 нм | 125/100 нм | 120/() NM |
| веса | |||
| 670.7. | 1,3 кг | ||
| Форма | φ160 × L54 мм | φ1500 × L80 мм | φ94 × L62 MM |
| TORRE-WO-WELE | |||
| ROOR-WELE | |||
| . 92/() Нм/кг | |||
| Эффективность и субъективная зависимость от условий эксплуатации | () | () | 90%, низкая (крутящий момент и скорость) |
| 1:100) (РГ) | 80 (РГ) | 21 (WG) | |
| NO-загрузка стартового крутящего момента (прямое и обратное направление) | () | () | <0,1% |
| . | 1% * |
Открыть в отдельном окне
* Экстраполированные и/или приблизительные значения, см. дополнительную информацию в Приложении I .
Таким образом, несмотря на то, что лежащая в основе топология Wolfrom указывает на то, что эффективность, безусловно, будет сложной задачей, эта инновационная коробка передач иллюстрирует большой потенциал, доступный для переосмысления существующих технологий и их адаптации к будущим потребностям робототехники. Genesis Robotics недавно вступила в интересное партнерство с известными промышленными компаниями, такими как Koch Industries Inc. и Demaurex AG.
Привод Архимеда
Компания IMSystems из Нидерландов является дочерней компанией Делфтского технологического университета, созданной в 2016 году для использования изобретения Привода Архимеда (Schorsch, 2014).
Привод Archimedes снова повторяет топологию редуктора Wolfrom (также с разрезным зубчатым венцом в некоторых конструкциях), но включает революционную инновацию в использовании роликов вместо зубчатых колес, чтобы заменить контакты зубьев контактами качения, см. . Контролируемая деформация роликовых сателлитов позволяет передавать крутящий момент между сателлитами аналогично колесам автомобиля.
Открыть в отдельном окне
Внутренняя конфигурация привода Archimedes с детальным изображением планет Flexroller, адаптированных из IMSystems (2019) с разрешения © 2019 Innovative Mechatronic Systems B.V., со схемой его базовой топологии.
Показатели производительности, взятые из брошюры компании (IMSystems, 2019) и доступные по запросу, показывают, что использование топологии Wolfrom дает этому устройству возможность достигать очень высоких передаточных чисел в компактной форме, но также приводит к низкой топологической эффективности. По данным IMSystems, замена контакта зубьев шестерни на контакт качения способствует минимизации контактных потерь, что, в частности, при передаче крутящего момента между планетарной передачей и кольцевыми роликами должно компенсировать высокий коэффициент скрытой мощности и привести к максимальной эффективности. около 80% (IMSystems, 2019 г.)). Данные по пусковым моментам или независимым от нагрузки потерям не предоставляются.
Для обеспечения передачи высокого крутящего момента без проскальзывания необходимо строго контролировать деформацию планетарных роликов, а также производственные допуски редуктора. Это представляет собой одну из основных технологических проблем и является основой инноваций, представленных этой технологией (Schorsch, 2014).
NuGear
STAM s.r.l. — частная инжиниринговая компания из Генуи, которая помогла разработать роботизированное соединение для робота-гуманоида I-Cub. Их NuGear представляет собой нутирующий редуктор, который изначально был задуман (Barbagelata and Corsini, 2000) для космических приложений, но может развить свой потенциал и для робототехники за счет исследования альтернативных производственных средств.
В открытом доступе нет информации о рабочих характеристиках этого редуктора, что означает, что мы можем предоставить здесь только предварительный анализ его топологии и итоговых характеристик, которые можно ожидать на основе ограниченной информации, доступной в основном из проекта Caxman EU. (CAxMan, 2020), для которых NuGear был вариантом использования, и из доступных патентов (Barbagelata et al., 2016).
Внутренняя структура NuGear представлена с использованием эквивалентной конфигурации PGT — абстрагирование аспекта нутации для облегчения понимания. При этом становится ясно, что NuGear напоминает два PGT Wolfrom, для которых несущая используется в качестве входа, соединенных последовательно, и где каждый из них соответствует одному из двух этапов, определенных в Barbagelata et al. (2016). Это еще раз указывает на то, что в этой коробке передач будут присутствовать относительно высокие коэффициенты скрытой мощности. Для передаточного числа 1:100 и при условии сбалансированного усиления 1:10 на каждой из двух ступеней, как это предложено в Barbagelata et al. (2016), мы получаем, используя уравнения, полученные в Приложении I, коэффициент скрытой мощности 32, что указывает на аналогичную топологическую эффективность эффективности Wolfrom PGT.
Открыть в отдельном окне
Внутренняя конфигурация двухступенчатого редуктора NuGear для версии с оппозитными планетарными контактами адаптирована из CAxMan (2020) с разрешения © Stam S. r.l. Он включает также схему лежащей в его основе топологии.
Остается подтвердить, в какой степени использование методов аддитивного производства может помочь STAM s.r.l. уменьшить большие производственные затраты на конические зубчатые колеса, а также может ли операция нутации обеспечить достаточную надежность и более компактную форму, что может открыть двери для ее использования в области робототехники (CAxMan, 2020).
Двусторонний привод
Компания FUJILAB в Иокогаме предложила в Fujimoto (2015) коробку передач с высоким обратным ходом для робототехники, которая особенно подходит для работы без датчика крутящего момента (Kanai and Fujimoto, 2018).
Как видно из , конфигурация этого устройства снова аналогична Wolfrom PGT. Используя эту топологию, Fujimoto et al. смогли достичь при передаточном числе 1:102 КПД прямого хода 89,9% и КПД заднего хода 89,2%. Пусковой момент без нагрузки в направлении обратного хода составил 0,016 Нм в редукторе с внешним диаметром ~ Φ50 мм (Kanai and Fujimoto, 2018). Стратегия, используемая для достижения такой высокой эффективности с топологией Wolfrom, заключается в оптимизации коэффициентов сдвига профиля (Fujimoto and Kobuse, 2017).
Открыть в отдельном окне
Внутренняя конфигурация двустороннего привода, высокоэффективного редуктора, способного достигать передаточного числа 1:102 с использованием топологии Wolfrom, любезно предоставлено © Yasutaka Fujimoto.
Эти многообещающие результаты — см. — показывают, что выравнивание отношений подхода и углубления за счет оптимизации коэффициентов сдвига профиля может привести к чрезвычайно высокой эффективности построения сетки. Насколько известно авторам, эта стратегия была первоначально предложена Хори и Хаяси (19).94) и особенно интересен в топологии Wolfrom, где он может в конечном итоге обеспечить КПД выше 90% в сочетании с высокими передаточными числами и компактными топологиями.
Привод с подшипником зубчатого колеса
После новаторской работы в этой области Джона М. Враниша из НАСА, которая привела к изобретению планетарной передачи без водила Вранишем (1995) и подшипников с частичным зубчатым зацеплением (Враниш, 2006), Центр космических полетов имени Годдарда НАСА представил свою концепцию нового зубчато-подшипникового привода в Weinberg et al. (2008).
Северо-восточный университет в Бостоне продолжил разработку этого нового привода для применения в роботизированных соединениях. Как видно на рисунке , он включает в себя коробку передач Wolfrom, приспособленную для использования конструкции Vranish без водила и зубчатых подшипников. Зубчатые подшипники представляют собой контакты качения, которые предусмотрены для каждой пары зацеплений шестерен в соответствии с их делительным диаметром и снижают нагрузку на подшипники редуктора (Brassitos et al., 2013). Эта топология обеспечивает удобную интеграцию электродвигателя, который, таким образом, встроен в полую область внутри большого солнечного зубчатого колеса в конфигурации, специально предназначенной для космических приложений (Brassitos and Jalili, 2017).
Открыть в отдельном окне
Внутренняя конфигурация зубчато-подшипникового привода, включая встроенный бесщеточный двигатель, адаптированный из Brassitos and Jalili (2017) с разрешения © 2017 Американского общества инженеров-механиков ASME. Справа также показана базовая топология Вольфрома с расщепленным реакционным кольцом.
В Brassitos and Jalili (2018) металлический прототип зубчато-подшипникового привода с передаточным числом 1:40 характеризуется жесткостью, трением и кинематической ошибкой. Измерения полностью соответствуют измерениям FUJILAB и подтверждают низкий пусковой крутящий момент без нагрузки в этой конфигурации (0,0165 Нм для внешнего диаметра редуктора ~Φ100 мм). После экспериментального измерения жесткости, трения и кинематической погрешности их привода (Brassitos and Jalili, 2018) они интегрировали эти значения в динамическую модель, которая затем была смоделирована и сравнена с реакцией скорости разомкнутого контура системы при свободном синусоидальном движении, показав хорошие результаты. корреляции и предполагает очень удобную высокую линейность передачи.
Предварительные измерения показали хороший комбинированный КПД двигателя и редуктора Wolfrom с передаточным числом 1:264 (Brassitos et al., 2013), что не очень хорошо коррелирует с расчетным коэффициентом скрытой мощности, равным 196. Эффективность не снова были в центре внимания недавних статей авторов, и мы, к сожалению, не смогли на данный момент подтвердить окончательные уровни эффективности, которых могут достичь более новые прототипы.
В любом случае привод Gear Bearing предлагает очень интересные возможности для использования потенциала топологии Wolfrom в робототехнике. Возможность отказаться от держателя и встроить электродвигатель внутрь редуктора в общем корпусе позволяет создавать впечатляюще компактные конструкции. Возможность использования роликов с зубчатыми подшипниками для снижения радиальной нагрузки на подшипники также является многообещающим вариантом для повышения компактности и повышения эффективности (Brassitos et al. , 2019).).
The Galaxie Drive
Schreiber and Schmidt (2015) защищает основные инновации, включенные в Galaxie Drive, редуктор, который WITTENSTEIN в настоящее время выводит на рынок прецизионных редукторов через свой стартап Wittenstein Galaxie GmbH, созданный в апреле 2020 года.
Хотя техническое описание и подробная информация еще не доступны, принцип работы и ожидаемые выгоды также были раскрыты. В Galaxie Drive используется новый кинематический подход, основанный на линейном ведении единственного зуба в Teeth Carrier , но, по мнению этих авторов, его топология напоминает топологию Strain Wave Gear, см. Гибкий шлицевой элемент заменяется держателем зубьев, включающим два ряда отдельных зубьев, предназначенных для радиального перемещения и зацепления с круговым шлицем, поскольку вращающийся многогранный вал выполняет роль генератора волн с многоугольным периметром (Schreiber and Röthlingshöfer, 2017). Таким образом, несколько отдельных зубьев входят в зацепление с круговым шлицем одновременно, как и в Harmonic Drive. Это, вместе с высокоустойчивым к крутящему моменту двухточечным контактом между каждым отдельным зубом и держателем зубов, обеспечивает этому устройству характерный нулевой люфт, высокую жесткость на кручение и эталонную способность отношения крутящего момента к весу, по словам производителя.
Открыть в отдельном окне
Фрагмент зацепления зубьев коробки передач Galaxy (R) DF, адаптированный из Schreiber (2015) с разрешения © 2020 Wittenstein Galaxie GmbH. Он включает схему базовой топологии KHV.
В прямом обмене представители Wittenstein подтвердили, что очевидная проблема трения между отдельными зубьями и их направляющим круглым кольцом решена, и Galaxie может достигать пиковой эффективности более 90%. Из-за лежащей в его основе конфигурации KHV ожидаются большие коэффициенты скрытой мощности, но пока невозможно получить более глубокое представление об эффективности зацепления, которое будет результатом радиального перемещения зубьев, которое включает в себя новую логарифмическую спиральную боковую поверхность зуба (Michel, 2015).
Первоначально Galaxie Drive предназначался для точного машиностроения, где высокая жесткость и сопротивление крутящему моменту могут помочь увеличить скорость и повысить производительность. В будущем мы, безусловно, сможем оценить потенциал этой инновационной технологии и для роботизированных приложений.
Новое поколение робототехнических устройств меняет приоритеты в выборе адекватных редукторов. Вместо предельной точности на высоких скоростях к этим устройствам предъявляются более строгие требования с точки зрения легкости и очень эффективных механических устройств усиления.
Сверхлегкие тензоволновые приводы (HD, E-cyclo), безусловно, в очень хорошем состоянии для удовлетворения этих потребностей, что подтверждается их нынешним доминированием в области коботов. При рассмотрении волнового привода для роботизированной задачи pHRI работа при низких крутящих моментах и скоростях должна быть сведена к минимуму, если требуется максимизировать эффективность. Хотя их оптимизированная геометрия зубьев способствует более линейной жесткости на кручение, трение остается сильно нелинейным и зависит от направления, что также накладывает определенные ограничения на использование. Храповой механизм вследствие ударной нагрузки является еще одним ограничением, которое следует учитывать для коробки передач этого типа, чего не должно быть у E-Cyclo (SUMITOMO, 2020).
Циклоидные приводы прошли долгий путь, прежде чем в конечном итоге стали доминирующей технологией в промышленных роботах. Благодаря технологическим достижениям, направленным на улучшение ограничений по люфту и входной скорости, теперь они могут обеспечивать хорошую точность с приемлемой эффективностью, несмотря на высокие коэффициенты скрытой мощности, возникающие в результате базовой топологии KHV, эквивалентной топологии волновых приводов. Использование ступени предварительного зубчатого зацепления также вносит важный вклад в достижение этой цели за счет повышения базовой топологической эффективности. Сверхлегкие конструкции, такие как у SPINEA, демонстрируют интересный потенциал, но в конечном итоге потребуются более революционные подходы, такие как пластиковые материалы, чтобы удовлетворить потребности в более легких коробках передач и больших передаточных числах, необходимых для HRI. Пока это не станет возможным, циклоидные приводы можно рассматривать только для больших полезных нагрузок, когда их больший вес и результирующая инерция не являются критическими для работы. Когда предельная точность не требуется, мер по компенсации люфта можно избежать в пользу повышения эффективности и снижения пусковых моментов. В любом случае следует позаботиться о том, чтобы адекватно справляться с пульсациями крутящего момента, и, возможно, потребуется оставить предварительную ступень редуктора, чтобы обеспечить высокие входные скорости двигателя.
Невозможность планетарных редукторов уменьшить люфт при сохранении хорошей производительности и ограниченная жесткость на кручение ограничивают их использование в промышленной робототехнике. Тем не менее, PGT чрезвычайно универсальны, о чем свидетельствует их широкое использование во многих современных промышленных устройствах. И они по своей природе эффективны, надежны и относительно просты — дешевы — в производстве. Это может объяснить недавний интерес робототехников к PGT, а также то, почему пять из шести изученных здесь инновационных редукторов основаны на конфигурации PGT с высоким передаточным числом: топологии Wolfrom. Многообещающими характеристиками являются лучшая топологическая эффективность в сочетании с улучшением эффективности зацепления за счет модификации профиля или еще один шаг вперед, заключающийся в замене зубьев роликовыми контактами. В сочетании с возможностями, открываемыми их полой топологией, эти элементы потенциально могут привести к возвращению PGT в робототехнику.
Наше исследование показывает, что большая универсальность технологий редукторов, используемых в робототехнике, представляет собой серьезную проблему для прямого сравнения их характеристик. Как показывают примеры люфта и максимальной входной скорости, адекватные модификации конструкции могут соответствующим образом компенсировать большинство первоначальных слабых мест определенной технологии за счет компромиссов в других аспектах, обычно включая эффективность, размер, вес и стоимость. Точно так же большие коэффициенты скрытой мощности указывают на значительный топологический недостаток с точки зрения эффективности, но его также можно — по крайней мере частично — компенсировать соответствующими модификациями. Таким образом, эффект обучения заключается в том, что выбор подходящей технологии редуктора для определенного применения pHRI является чрезвычайно сложным процессом, требующим глубокого понимания основных недостатков, возможностей улучшения и производных компромиссов каждой технологии. Следовательно, наша первоначальная цель исследования, заключающаяся в том, чтобы внести вклад в простую таблицу выбора, способную помочь неопытным инженерам-робототехникам в выборе подходящих технологий редукторов для их роботизированных устройств, не может быть достигнута. Вместо этого в этом документе собраны и объяснены основные параметры выбора и связанные с ними проблемы в каждой из доступных технологий, чтобы помочь инженерам-робототехникам pHRI развить необходимые навыки, необходимые для осознанного выбора подходящей, индивидуально оптимизированной коробки передач.
Два важных аспекта роботизированных редукторов для pHRI, к сожалению, не могут быть адекватно оценены в нашем исследовании на данном этапе: шум и стоимость. По мере того, как роботизированные устройства приближаются к человеку, шум привлекает все больше внимания робототехников. Редукторы, безусловно, представляют собой важный источник шума (воздушного и структурного), но, к сожалению, два основных ограничения рекомендуют исключить шум из нашего анализа на данном этапе. Во-первых, большинство производителей коробок передач еще не предоставляют количественные оценки шумовых характеристик, а когда они это делают, они склонны следовать другим методам испытаний, которые также не особенно подходят для условий эксплуатации в pHRI. Во-вторых, современные технологии коробок передач все еще должны пройти процесс оптимизации шума.
Стоимость также является важным параметром, позволяющим сделать технологии pHRI более доступными, и поэтому она становится важной для выбора подходящих редукторов для будущих робототехнических технологий. К сожалению, и здесь научному сообществу недоступна недостаточная справочная информация, чтобы можно было систематически и справедливо оценивать крупномасштабный стоимостной потенциал определенной технологии редукторов. Прежде чем можно будет определить подходящую основу для оценки этого потенциала, требуется большой объем исследовательской работы, которая явно выходит за рамки нашего исследования.
Эти два ограничения определяют основные рекомендации авторов для интересных будущих направлений исследований. Определение стандартных условий испытаний на воздушный и структурный шум в коробках передач, особенно адаптированных к типичным условиям эксплуатации и потребности в pHRI, могло бы позволить провести прямое сравнение различных технологий и способствовать их оптимизации шума. Кроме того, компиляция доступных моделей затрат для производственных процессов, связанных с производством редукторов, и их адаптация к особенностям конкретных технологий, используемых в робототехнике, позволили бы составить основу для оценки крупномасштабного стоимостного потенциала (и барьеров) различные технологии.
Все авторы принимали участие в предварительной работе, связанной с этой темой исследования, и внесли свой вклад в концептуализацию структуры, представленной в рукописи. PG работал над созданием подходящей системы оценки для проведения анализа редуктора и взял на себя инициативу в написании рукописи и придании ей текущей формы. PG и ES в равной степени способствовали выявлению потенциально подходящих технологий и их анализу с помощью фреймворка. Все авторы прочитали корректуру и внесли свой вклад в окончательную версию статьи.
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Авторы благодарят профессора Ясутаку Фудзимото из Йокогамского национального университета, а также компании Neugart GmbH, Harmonic Drive SE, Sumitomo Drive Germany GmbH, Genesis Robotics, Innovative Mechatronic Systems B.V., Stam s.r.l. и Wittenstein Galaxy GmbH за любезную поддержку и разъяснения, а также за предоставление нам разрешения на использование прилагаемых изображений их устройств.
Финансирование. SC, ES (SB Ph. D.) и TV (SB Postdoctoral) являются научными сотрудниками Исследовательского фонда Фландрии — Fonds voor Wetenschappelijk Onderzoek (FWO). Эта работа частично финансировалась исследовательской и инновационной программой Horizon 2020 Европейского Союза в рамках соглашения о гранте № 687662 — проект SPEXOR.
Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/frobt.2020.00103/full#supplementary-material
Щелкните здесь, чтобы открыть дополнительный файл данных. (792K, DOCX)
- Albu-Schäffer A., Eiberger O., Grebenstein M., Haddadin S., Ott C., Wimbock T., et al. (2008). Мягкая робототехника. IEEE-робот. автомат. Маг. 15, 20–30. 10.1109/MRA.2008.
, Караиванов Д. (2005). Планетарные передачи с более высоким составом на Международной конференции по зубчатым колесам VDI, Vol. 1904 (Мюнхен: VDI-Bericht;), 327–344. [Google Scholar] 10.1115/DETC2018-85647 [CrossRef] [Google Scholar] мех. Мах. Теория
39, 921–942. 10.1016/j.mechmachmachtheory.2004.04.003 [CrossRef] [Google Scholar]3 [CrossRef] [Google Scholar]
, Лефебер Д. (2018). Представляем составные планетарные передачи (C-PGT): компактный способ достижения высоких передаточных чисел для носимых роботов, на Международном симпозиуме по носимой робототехнике (Пиза:), 485–489.. 10.1007/978-3-030-01887-0_94 [CrossRef] [Google Scholar] Патент Японии № JP2015164100. Токио: Патентное ведомство Японии. [Google Scholar] IEEE-робот. автомат. лат.
2, 741–748. 10.1109/LRA.2017.2651946 [CrossRef] [Google Scholar]3970 [CrossRef] [Google Scholar]
ДВИГАТЕЛЬ с прямым приводом Revo1™ [Брошюра; ], Moss: доступно в Интернете по адресу: https://www.halodi.com/revo1 (по состоянию на 30 апреля 2020 г.). [Академия Google] Транс. Япония. соц. мех. англ.
60, 3940–3947. 10.1299/kikaic.60.3940 [CrossRef] [Google Scholar] , ООО «АКГирс» (2013). Анализ планетарных приводов с высоким передаточным числом. Соотношение
3, 10. [Google Scholar] , Алексахин И., Власов И. П. (1996). Система передач. Патент США № US5505668A. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам. [Google Scholar] (2019a). Редукторы Wolfrom для легкой робототехники, ориентированной на человека, в Proceedings of the International Conference on Gears 2019 (Мюнхен: VDI; ), 753–764. [Google Scholar] (1989). Präzisions-Getriebe für die Automation: Grundlagen und Anwendungsbeispiele. Ландсберг: Verlag Moderne Industrie. [Google Scholar] [Академия Google] 25, 1419–1424. 10.1109/TRO.2009.2028764 [CrossRef] [Google Scholar]5 [CrossRef] [Google Scholar]
Kenndaten, Einsatzhinweise: Shaker. [Google Scholar] (1990). Сравнительный анализ проектирования, моделирования и управления роботизированными трансмиссиями (кандидатская диссертация). № ВОЗИ-90-43. Департамент машиностроения и Океанографический институт Вудс-Хоул, Массачусетский технологический институт, Кембридж, Массачусетс, США:
10.1575/1912/5431 [CrossRef] [Google Scholar] [Google Scholar] , Хён Д.Дж., Ли Дж., Оттен Д.М. и др. (2014). Принципы проектирования энергоэффективного передвижения на ногах и их реализация на роботе-гепарде Массачусетского технологического института. IEEE/ASME Trans. мех.
20, 1117–1129. 10.1109/TMECH.2014.2339013 [CrossRef] [Google Scholar] , ван Оорт Г., Дертьен Э. (2008). Концепция нового энергоэффективного привода, Международная конференция IEEE / ASME по передовой интеллектуальной мехатронике, 2008 г. (Сиань: IEEE; ), 671–675. 10.1109/AIM.2008.4601740 [CrossRef] [Google Scholar] Занять. Эргон. Гум. Факторы
7, 3–4, 237–249. 10.1080/24725838.2019.1626303 [CrossRef] [Google Scholar] [Google Scholar] Каталог. [Академия Google]2193 [CrossRef] [Google Scholar]
Статьи из Frontiers in Robotics and AI предоставлены здесь с разрешения Frontiers Media SA
принципы работы, основные неисправности Этапы адаптации робота
В статье представлен обзор устройства, основных принципов работы роботизированной коробки (дурашифт-ЕСМ), устанавливаемой на Ford Fiesta и Fusion с 2002 по 2011 год, и также анализируются основные неисправности, возникающие при эксплуатации данной МКПП.
Впервые роботизированная коробка такого типа была представлена компанией Ford не на Fiesta и Fusion, а на Ford Transit начиная с 2000 модельного года. Fusion, так как это автомобили на одной базе. Преимущества этой системы очевидны: она значительно дешевле полноценной автоматической коробки передач, так как в центре этой системы находится несколько модифицированная, хорошо зарекомендовавшая себя механическая коробка передач B5/IB5, которая была объединена с системой автоматической коробки передач. И к тому же он более ремонтопригоден, так как зачастую ремонту подлежат отдельные звенья системы, а не вся АКПП. Также добавим, что коробка-робот устанавливалась только на модели, оснащенные двигателем 1.4, причем как бензиновым, так и дизельным. На версиях с бензиновым двигателем 1.6 уже стояла полноценная четырехступенчатая автоматическая коробка передач, которая обозначалась как AW80.
Рассмотрим теперь структуру системы более подробно. На рисунке ниже показаны его основные компоненты:
1. Модуль управления гидравлической трансмиссией (TCM)
2. Диагностический разъем (DLC)
3. Блок управления двигателем (PCM)
4. Модуль ABS
5. Панель приборов
6. Блок комфорта (GEM)
7. Электронный переключатель передач
8. Датчик люфта сцепления
9. Датчик люфта в приводе селектора
10. Датчик люфта в приводе переключения передач
11. Переключатель Stoplight
12. Дверь водителя водителя ограниченного переключателя
13. Реле питания
. серводвигатель
19. Серводвигатель переключения передач.
Теперь кратко проанализируем функции основных элементов системы.
1. TCM является основным элементом управления роботизированной коробкой. Он объединяет в одном блоке как сам цифровой модуль управления, так и гидропривод, управляющий переключением передач, выключением и включением сцепления в зависимости от текущей стратегии управления. Этот модуль, часто называемый исполнительным механизмом сцепления (его технический номер 2S6R 7M168-SC является одним из вариантов), расположен на левом переднем лонжероне и интегрирован в систему как гидравлически, так и электрически. В процессе работы TCM получает сигналы от различных датчиков и устройств управления о режиме работы двигателя, нагрузке на двигатель, скорости движения, включенной передаче и т. д. и преобразует их в сигналы управления исполнительными механизмами. Внутри модуля управления гидрокоробкой установлен электродвигатель постоянного тока, который вращает червячную передачу. Эта шестерня имеет функцию самоблокировки, так что поршень главного цилиндра сцепления может естественным образом оставаться в любом положении без приложения силы для блокировки его в этом положении. Червячная передача соединена со штоком поршня с помощью специального болта.
Можно выделить следующие функции управления TCM:
a. Снижение крутящего момента двигателя;
б. выключение сцепления;
в. Выбор необходимой передачи;
д. Синхронизация;
эл. Включение выбранной передачи;
ф. зацепление сцепления;
г. Увеличьте крутящий момент двигателя.
Этот модуль должен управлять переключением передач таким образом, чтобы в конечном итоге это помогло увеличить срок службы трансмиссии.
2. Блок управления двигателем является важным элементом системы управления роботизированной коробкой. Он получает сигналы от датчиков и исполнительных механизмов о нагрузке, частоте вращения двигателя, моменте зажигания, скорости автомобиля и т. д. и передает эти данные в TCM для отработки той или иной стратегии управления передачами.
3. Модуль АБС также участвует в разработке стратегий управления. Модуль ABS отправляет в TCM данные о скорости каждого колеса, которые он получает от датчиков ABS, на основании которых делается вывод о режиме движения автомобиля.
4. Электронный селектор передач не имеет прямой механической связи с коробкой передач, он управляет переключением передач через модуль TCM, с которым он связан по шине CAN. Изменение положения селектора отслеживается датчиками Холла, преобразуется в цифровой сигнал и передается в TCM. Эти датчики и микросхемы расположены на печатной плате под крышкой ручки селектора.
5. Датчик зазора сцепления установлен в TCM и представляет собой плунжерный датчик с соленоидом. Вращение червячной передачи преобразуется вращением болта в линейное движение ферритового сердечника, что в свою очередь изменяет поле в катушке и далее передается в виде изменения сигнала на блок управления TCM. Используя этот управляющий сигнал, TCM определяет точное положение сцепления и, таким образом, осуществляет включение или выключение сцепления, изменение крутящего момента или функцию плавного хода.
6. Датчики зазора в приводе селектора и в приводе переключения передач интегрированы в исполнительные серводвигатели, которые расположены непосредственно на коробке робота. Каждый из этих двигателей оснащен 10 парами магнитов, над каждым из которых расположены два датчика Холла с интегрированными в них элементами схемы, по сигналам датчиков Холла определяющие скорость вращения, угол поворота и направление вращения каждого серводвигателя. . Эта информация используется TCM для точного управления выбором и переключением передач.
7. Концевой выключатель стоп-сигнала передает информацию на клапан управления трансмиссией при нажатии водителем на педаль тормоза и используется им для следующих целей:
а. разблокировка стартера при запуске двигателя
б. переключение на пониженную передачу при движении под уклон
c. включение передней или задней передачи при трогании с места
d. отключение функции частичного включения сцепления (creep-функция)
e. при адаптации определить положение точки включения сцепления.
8. Сервоприводы выбора и переключения передач приводятся в действие корпусом клапана TCM. Для этого они механически соединяются со штоком выбора передач в коробке передач с помощью штоков и рычагов. В обоих двигателях используется червячная передача для увеличения усилия управления, необходимого для воздействия на шток переключателя передач. Сервомеханизм переключения передач разработан со специальным демпфирующим устройством для сглаживания и смягчения толчков и толчков, возникающих при переключении передач, а также для сокращения времени переключения передач.
Стратегии управления переключением передач
1. Парковка — при выключенном двигателе сцепление включено. Если при этом селектор не находится в нейтральном положении (N), включается передача, предотвращающая скатывание автомобиля.
2. Блокировка запуска двигателя. Двигатель запустится только после того, как PCM получит разрешение на запуск от модуля управления коробкой передач.
3. Адаптация точки сцепления (адаптация трансмиссии) — При установке нового или другого ТСМ, а также после ремонта последнего точка сцепления должна быть переопределена. Точка контакта или точка сцепления – это взаимное положение диска и корзины сцепления, при котором от двигателя к трансмиссии передается крутящий момент, равный примерно 4 Нм. Данная процедура выполняется только с помощью специализированного оборудования Форд и также может быть выполнена специалистами Очаково-Форд. Информация о точке контакта требуется TCM для максимально плавного включения и выключения сцепления.
4. Частичное включение сцепления (creep-функция) — эта функция используется и на полноценных АКПП и заключается в том, что при включенных передачах «D» или «R» и педали газа или тормоза отпускаются, машина «ползет» на малой скорости, на полувыжатом сцеплении.
5. Защита от перегрева сцепления — для этого TCM способен определять температуру сцепления, выдавать сообщение об ошибке и изменять стратегию управления, если температура сцепления превышает допустимый порог.
6. Трогание с места — обычно водитель трогается с места нажатием на педаль газа. В принципе трогаться можно как на 1-й, так и на 2-й и 3-й передачах. В автоматическом режиме коробка движется только с первой передачи. Чтобы трогаться с места на других передачах, водитель должен включить их принудительно.
7. Движение вниз по крутому склону — TCM определяет, что автомобиль катится вниз по крутому склону, сравнивая информацию об ускорении автомобиля с информацией о нагрузке на двигатель. Если TCM определяет, что автомобиль движется вниз по крутому склону, он предотвращает переключение на более высокую передачу ниже определенного числа оборотов двигателя, чтобы воспользоваться эффектом торможения двигателем. Кроме того, TCM будет переключаться на более низкую передачу при нажатии педали тормоза. при условии, что это позволяет обороты двигателя.
8. Определение сопротивления движению — гидромодуль, как и в предыдущем случае, видит сопротивление путем сравнения информации об ускорении автомобиля с информацией о нагрузке на двигатель. TCM выбирает время переключения в зависимости от величины сопротивления движению.
Существуют и другие стратегии управления передачей, но мы перечислили основные из них выше.
Теперь перейдем к основным неисправностям, возникающим при эксплуатации роботизированной коробки durashift-ESM.
Пожалуй, основная проблема заключается в неисправности, возникающей в самом блоке управления трансмиссией — TCM. Со временем изнашиваются коллектор и щетки вала в гидромодуле и он начинает выходить из строя — контроллер не может точно определить точку контакта муфты. При этом адаптировать коробку становится невозможно, так как модуль не понимает, где находится точка сцепления. Лечится это либо заменой гидроблока на исправный, либо ремонтом последнего. Такую процедуру могут провести специалисты Очаково-Форд. Процедура включает в себя снятие блока управления трансмиссией, его ремонт, если он ремонтопригоден, установку, а также последующую адаптацию коробки. При этом стоимость ремонта на момент написания от 16 тысяч до 20 тысяч рублей. Этот модуль трансмиссии, пожалуй, один из самых дорогих элементов системы управления трансмиссией. И стоит более 1000 евро новый. Можно, опять же, найти б/у гидроблок на разборке, он стоит 20-25 тысяч рублей, но, конечно, никто не знает, сколько времени и рабочий ли он. Часто бывает так, что люди покупают б/у запчасть, после установки выясняется, что она неисправна, а вернуть уже не могут. Поэтому вариант ремонта ТСМ самый надежный — конечно, если он ремонтопригоден.
Еще одной распространенной неисправностью является выход из строя одного из сервоприводов, которые стоят на коробке. В этом случае их лучше поменять на б/у или новый, так как ремонтировать их намного сложнее, чем гидромодуль. Опять же, после замены мотора придется пройти адаптацию (переобучение) коробки передач. Эта процедура стоит около трех тысяч рублей в Очаково-Форд.
Часто при неисправности коробки робот на Фиестах и Фьюжнах необходимо произвести диагностику системы АБС, ведь возникающие в ней неисправности могут напрямую влиять на работу системы управления трансмиссией. Опять же, перед проведением процедуры адаптации необходимо обеспечить устранение неисправностей, связанных с кодами самодиагностики — иначе диагностический прибор просто не будет допущен к процедуре адаптации.
И, наконец, одна из самых распространенных неисправностей – коррозия электропроводки. Часто, прежде чем сломя голову кидаться в водоворот ремонта или поиска б/у модуля управления трансмиссией, нужно предварительно проверить состояние проводки на предмет целостности и отсутствия коррозии, проверить целостность предохранителей и т. д. А лучше всего доверить эту процедуру опытному очаковско-фордовскому электрику-диагносту.
Вопрос: Робот Ford Fusion, адаптация
Приветствую! Форд фьюжн 1. 4 МКПП. После замены щеток в блоке ТСМ (сцепления) робот стал переключаться с сильными рывками. Понятно, что нужна адаптация сцепления. такую процедуру выполняет либо IDS, либо Scandoc. Я хотел бы знать наверняка. Справится ли Скандок? Может есть еще варианты?
Ответ: Fusion пришел ко мне с роботом.
Вроде претензий нет. Но мне не очень нравится как машина едет, переключается. Хотя может это и норма для них
Есть ли смысл приспосабливаться? И справится ли Ланч с этой задачей?
Точнее спрошу, не сделаю ли я хуже в результате каких-то неправильных действий?
Вопрос: Ford Fusion 1.4 дизель 2002
Ford Fusion 1.4 дизель 2002 не заводится ошибка P0606 U2510
Ответ:
|
При проектировании роботизированной трансмиссии инженеры американской компании Ford решили полностью избавиться от сложных гидравлических механизмов. Первый Durashift был построен на базе обычной механики iB5 от Focus в 2000 году. Его дополнили электронным блоком с электрогидравлическим сцеплением, исполнительными механизмами. Такая конструкция благотворно сказывается на скорости переключения. На это уходит не 600 миллисекунд, как у механики, и не 800 миллисекунд, как у АКПП, а всего 200 миллисекунд.
Вес Durashift EST такой же, как у классической машины. Но типичных потерь в гидротрансформаторе нет, поэтому расход автомобилей с роботизированной трансмиссией существенно меньше, чем в случае с АКПП. Но конструкторам не удалось избежать типичного недостатка «робота» — разрыва мощности. Это негативно сказывается на плавности переключения.
В качестве приводов используются два электродвигателя, размещенные на одной плите. Для обеспечения правильного переключения положение двигателей контролируется датчиками Холла. Сам рычаг переключения передач механически не связан с коробкой. Его движение считывается датчиками, данные с которых снимаются, а затем передаются в блок управления электроникой. Информационная шина CAN встроена в конструкцию. Вместо традиционной механики сцепления использовалось оригинальное соединение диска и выжимного подшипника.
Сцепление Durashift саморегулирующееся. Это дает два неоспоримых преимущества:
- Не требует большого усилия для выключения, что делает эксплуатацию автомобиля более комфортной.
- Увеличен ресурс за счет автоматической регулировки.
Примечание: Durashift EST устанавливается на модели Fiesta, Fusion, Mazda 2 с двигателем 1,4 л. «Робот» защищен от аварийных ситуаций. Например, запустить двигатель можно только в режиме N, педаль тормоза должна быть нажата. ЭБУ предотвращает ручное переключение, когда частота вращения двигателя и скорость движения не соответствуют включенной передаче.
Адаптация роботизированных коробок Durashift
При сбоях в электронике, после ТО, замены узла сцепления, робота приходится переобучать — адаптировать трансмиссию. Для этого необходим правильный подбор крутящего момента, правильное переключение и выключение сцепления, плавный старт движения. Для проведения адаптации используются дилерские сканеры. Процедура состоит из трех этапов:
- Прокачка гидравлической системы с настройкой TCM. Старую тормозную жидкость меняют или просто доливают.
- Настройка серводвигателей для настройки переключения.
- Организация связи между сцеплением, серводвигателями и модулем TCM.
Обратите внимание, что при эксплуатации в российских условиях МКПП используется полусинтетическое масло 75W-90. Но никакое обслуживание не защитит от поломок при нарушении нормального режима работы. В случае поломки автомобиля с Durashift EST лучше не буксировать его в сервис, а воспользоваться услугами эвакуатора. При размещении эвакуатора на эстакаде включите нейтральную передачу.
Распространенные проблемы Durashift EST
1) Передачи не переключаются из-за повреждения проводки
- Жгут проводов не защищен от негативного воздействия окружающей среды. Коммутация страдает от влаги и грязи, особенно область между электродвигателями и контроллером распределительной коробки, максимально приближенная к земле.
2) Выход из строя сцепления
- Ресурс сцепления составляет 120–180 тыс. км. Его развитие связано не только с качеством обслуживания, но и со стилем вождения. Если при длительных остановках ручку КПП переводить в нейтральное положение, это способствует меньшему перегреву, долгому сроку службы исполнителя и самого сцепления.
3) Ошибки датчиков
- Большинство ошибок связано с неправильным положением сцепления или механизма переключения.
4) Двигатели в сервоприводах работают неправильно
- Сервоприводы используют сложные импульсы для управления двигателями. Сами двигатели оснащены щеточными узлами с датчиками Холла. При их загрязнении работа механизма нарушается.
РВС-Мастер для безразборного ремонта Durashift EST
Пуск при минусовых температурах неизбежно приводит к ускоренному износу. То же самое происходит и в момент перегрева, когда машина простаивает в пробке. Большинство автомобилей с Durashift EST: Fiesta, Fusion, Mazda 2 эксплуатируются в мегаполисах. Поэтому коробка испытывает повышенную нагрузку. Их используют для защиты, которая также восстанавливает шестерни, валы, подшипники в трансмиссии.
После обработки образуется прочный слой металлокерамики. Изменяются физические характеристики рабочих поверхностей, снижается трение. Поэтому со временем гул, посторонние шумы и вибрация исчезают. Новообразованный слой устойчив к коррозии, восстанавливает номинальные размеры деталей, по своей структуре не чужд ферросплавам. В отличие от классических присадок, кондиционеров, промывок РВС-Мастер не влияет на свойства масла. Полусинтетика в МКПП сохраняет базовую текучесть и эффективность отвода тепла, не образует пены, осадка.
Нормализация работы МКПП способствует падению расхода топлива. Своевременное техническое обслуживание и профилактическая обработка геомодификатором трения позволяют пользоваться всеми преимуществами Durashift EST на Fiesta, Fusion, Mazda 2. К преимуществам такой МКПП можно отнести:
- Возможность полного контроля над ездой за счет торможения двигателем и активное ручное переключение.
- «Короткая» первая передача, которая подходит для быстрого старта со светофора.
- Автоматическая адаптация к текущим дорожным условиям — холмы, извилистые дороги. Это реализовано благодаря режиму распознавания подъема и спуска, который гарантирует переключение передач в оптимальной последовательности.
- Пригодность для динамичного вождения.
Для оптимальной работы коробки Ford Robot необходимо каждые 30-40 тыс. км заменять в ней тормозную жидкость и внимательно следить за ее состоянием. Одна из проблем в работе робота может быть связана с завоздушиванием гидросистемы. Выходом в такой ситуации станет адаптация коробки передач, которую выполняют в специализированных техцентрах.
Проводить данную процедуру также будет уместно при появлении типичных ошибок неисправности коробки робота Ford: ошибки p0919, ошибки P0810 (ошибка датчика положения сцепления) и ошибки p0949 (предыдущая попытка не доведена до конца).
Что такое адаптация коробки робота?
Адаптация робота Ford , которую часто называют «обучением момента вождения», представляет собой сложный многоэтапный процесс. Суть его заключается в том, что сбрасываются настройки электроники автомобиля, отвечающие за работу системы переключения передач. Так, она по-новому узнаёт крутящий момент двигателя, учится переключать передачи, трогаться без рывков и выжимать сцепление.
Этапы адаптации робота
В нашем техцентре процедура адаптации коробки робота проводится в три этапа, в качестве оборудования используется специальный сканер:
- На первом этапе производится настройка модуля ТСМ , тормозная жидкость заменяется, а сцепление гидравлически прокачивается при удалении воздуха из системы.
- На втором этапе с помощью сканера робот-перевертыш заново учится переключаться с первой передачи на вторую, со второй на третью и так далее.
- Заключительный этап, который проводится на работающем автомобиле, включает в себя налаживание (опять же с помощью сканера) совместной работы сцепления (модуль ТСМ) и исполнительных двигателей (узлов, отвечающих за прямое переключение передач).
Если все работы по адаптации робота были проведены правильно, то автомобиль будет плавно трогаться с места, также будет плавно выжиматься сцепление и включаться передачи.
Сотрудники нашего техцентра адаптируют робота Ford, а также отремонтируют роботизированные коробки передач, по всем правилам, используя для этого новейшее специализированное оборудование. Мы гарантируем, что вы останетесь довольны результатом!
Стоимость адаптации роботизированных коробок передач — от 2000 рублей
Обращайтесь в наш сервисный центр по адресу: г. Москва, Остаповский проезд, д. 3, стр. 2 (м. Волгорадский проспект) или по телефону +7 495 724 94 92 ,+7 916 944 57 62 .
Общая диагностика автомобилей Ford (Форд).
Роботизированная коробка передач Начало 2000 г. Корпорация Ford разработала роботизированную коробку передач (Ford Durashift EST), на базе обычной механической коробки передач iB5 от focus1,2,
В начале 2000 года корпорация Ford разработала роботизированную коробку передач (Ford Durashift EST), на базе обычной механической коробки передач iB5 от focus1,2, добавив к ней электронный блок — ЭБУ «мозги» с электрогидравлической сцепление и привод выбора и переключения передач (два электродвигателя).
Роботизированная коробка передач Durashift iB5 устанавливается на Fusion, Fiesta, Mazda 2.
Привод сцепления состоит из: электродвигателя постоянного тока, исполнительного механизма встроенного главного цилиндра сцепления и встроенного датчика перемещения, измеряющего перемещение привод.
Привод сцепления берет на себя функции, которые водитель должен был выполнять с помощью педали сцепления на автомобилях с обычным сцеплением:
Проблемы механической коробки передач Ford Fusion (Durashift)
Ford Fusion «адаптация» робот после замены щеток ВМС на свои. Без специального оборудования.
Неисправность
робот фордНашел старые видео снятые на гопро. я показал какие они неисправности роботизированная коробка передач на…
Дозированное включение сцепления для трогания с места
Выключение и включение сцепления для трогания с места Переключение передач во время движения
Выключение сцепления до упора на передаче стоит с выключенным двигателем
1 — Электродвигатель переключения передач
2 — Электродвигатель выбора передач
Электродвигатель выбора передач используется для выбора соответствующей передачи в коробке передач.
Электродвигатель переключения передач используется для выбора соответствующей передачи.
Электроника контролирует положение двигателей с помощью двух датчиков Холла, что предотвращает неправильное переключение передач.
Электронный рычаг переключения передач не имеет механической связи с коробкой передач.
Сцепление представляет собой механизм для передачи вращения, который можно плавно включать и выключать (выжимать), обеспечивающий безрывковый трогание автомобиля с места и бесшумное переключение передач.
Саморегулирующееся сцепление имеет следующие преимущества перед обычными сцеплениями:
В автоматизированных механических коробках передач используется саморегулирующееся сцепление. неисправности Усилие, необходимое для выключения такого сцепления, относительно невелико и остается практически неизменным в течение всего срока службы сцепления.
Читать
От того, насколько правильно подобран аккумулятор, зависит электроснабжение автомобиля и, соответственно, надежность работы двигателя.