
Как рассчитать крутящий момент электродвигателя
Крутящий момент электродвигателя – это сила вращения его вала. Именно момент вращения определяет мощность Вашего двигателя. Измеряется в ньютонах на метр или в килограмм-силах на метр.
Виды крутящих моментов:
- Номинальный – значение момента при стандартном режиме работы и стандартной номинальной нагрузке на двигатель.
- Пусковой – это табличное значение. Сила вращения, которую в состоянии развивать электродвигатель при пуске. При подборе эл двигателя убедитесь, что данный параметр выше, чем статический момент Вашего оборудования — насоса, либо вентилятора и т.д. В противном случае электродвигатель не сможет запуститься, что чревато перегревом и перегоранием обмотки.
- Максимальный – предельное значение, по достижении которого нагрузка уравновесит двигатель и остановит его.
Таблица крутящих моментов электродвигателей
В данной таблице собраны крутящие моменты наиболее распространенных в Украине электродвигателей АИР, а также требуемый при пуске – пусковой, максимально допустимый для данного типа электродвигателя – максимальный крутящий момент и момент инерции двигателей АИР (усилие важное при подборе электромагнитного тормоза, например)
| Двигатель | кВт/об | Мном, Нм | Мпуск, Нм | Ммакс, Нм | Минн, Нм |
| АИР56А2 | 0,18/2730 | 0,630 | 1,385 | 1,385 | 1,133 |
| АИР56В2 | 0,25/2700 | 0,884 | 1,945 | 1,945 | 1,592 |
| АИР56А4 | 0,12/1350 | 0,849 | 1,868 | 1,868 | 1,528 |
| АИР56В4 | 0,18/1350 | 1,273 | 2,801 | 2,801 | 2,292 |
| АИР63А2 | 0,37/2730 | 1,294 | 2,848 | 2,848 | 2,330 |
| АИР63В2 | 0,55/2730 | 1,924 | 4,233 | 4,233 | 3,463 |
| АИР63А4 | 0,25/1320 | 1,809 | 3,979 | 3,979 | 3,256 |
| АИР63В4 | 0,37/1320 | 2,677 | 5,889 | 5,889 | 4,818 |
| АИР63А6 | 0,18/860 | 1,999 | 4,397 | 4,397 | 3,198 |
| АИР63В6 | 0,25/860 | 2,776 | 6,108 | 6,108 | 4,442 |
| АИР71А2 | 0,75/2820 | 2,540 | 6,604 | 6,858 | 4,064 |
| АИР71В2 | 1,1/2800 | 3,752 | 8,254 | 9,004 | 6,003 |
| АИР71А4 | 0,55/1360 | 3,862 | 8,883 | 9,269 | 6,952 |
| АИР71В4 | 0,75/1350 | 5,306 | 13,264 | 13,794 | 12,733 |
| АИР71А6 | 0,37/900 | 3,926 | 8,245 | 8,637 | 6,282 |
| АИР71В6 | 0,55/920 | 5,709 | 10,848 | 12,560 | 9,135 |
| АИР71В8 | 0,25/680 | 3,511 | 5,618 | 6,671 | 4,915 |
| АИР80А2 | 1,5/2880 | 4,974 | 10,943 | 12,932 | 8,953 |
| АИР80В2 | 2,2/2860 | 7,346 | 15,427 | 19,100 | 13,223 |
| АИР80А4 | 1,1/1420 | 7,398 | 16,275 | 17,755 | 12,576 |
| АИР80В4 | 1,5/1410 | 10,160 | 22,351 | 24,383 | 17,271 |
| АИР80А6 | 0,75/920 | 7,785 | 16,349 | 17,128 | 12,457 |
| АИР80В6 | 1,1/920 | 11,418 | 25,121 | 26,263 | 20,553 |
| АИР80А8 | 0,37/680 | 5,196 | 10,393 | 11,952 | 7,275 |
| АИР80В8 | 0,55/680 | 7,724 | 15,449 | 16,221 | 10,814 |
| АИР90L2 | 3/2860 | 10,017 | 23,040 | 26,045 | 17,030 |
| АИР90L4 | 2,2/1430 | 14,692 | 29,385 | 29,385 | |
| АИР90L6 | 1,5/940 | 15,239 | 30,479 | 35,051 | 28,955 |
| АИР90LА8 | 0,75/700 | 10,232 | 15,348 | 20,464 | 15,348 |
| АИР90LВ8 | 1,1/710 | 14,796 | 22,194 | 32,551 | 22,194 |
| АИР100S2 | 4/2850 | 13,404 | 26,807 | 32,168 | 21,446 |
| АИР100L2 | 5,5/2850 | 18,430 | 38,703 | 44,232 | 29,488 |
| АИР100S4 | 3/1410 | 20,319 | 40,638 | 44,702 | 32,511 |
| АИР100L4 | 4/1410 | 27,092 | 56,894 | 65,021 | 43,348 |
| АИР100L6 | 2,2/940 | 22,351 | 42,467 | 49,172 | 35,762 |
| АИР100L8 | 1,5/710 | 20,176 | 32,282 | 40,352 | 30,264 |
| АИР112М2 | 7,5/2900 | 24,698 | 49,397 | 54,336 | 39,517 |
| АИР112М4 | 5,5/1430 | 36,731 | 73,462 | 91,827 | 58,769 |
| АИР112МА6 | 3/950 | 30,158 | 60,316 | 66,347 | 48,253 |
| АИР112МВ6 | 4/950 | 40,211 | 80,421 | 88,463 | 64,337 |
| АИР112МА8 | 2,2/700 | 30,014 | 54,026 | 66,031 | 42,020 |
| АИР112МВ8 | 3/700 | 40,929 | 73,671 | 90,043 | 57,300 |
| АИР132М2 | 11/2910 | 36,100 | 57,759 | 79,419 | 43,320 |
| АИР132S4 | 7,5/1440 | 49,740 | 99,479 | 124,349 | 79,583 |
| АИР132М4 | 11/1450 | 72,448 | 173,876 | 210,100 | 159,386 |
| АИР132S6 | 5,5/960 | 54,714 | 109,427 | 120,370 | 87,542 |
| АИР132М6 | 7,5/950 | 75,395 | 150,789 | 165,868 | 120,632 |
| АИР132S8 | 4/700 | 54,571 | 98,229 | 120,057 | 76,400 |
| АИР132М8 | 5,5/700 | 75,036 | 135,064 | 165,079 | 105,050 |
| АИР160S2 | 15/2940 | 48,724 | 97,449 | 155,918 | 2,046 |
| АИР160М2 | 18,5/2940 | 60,094 | 120,187 | 192,299 | 2,884 |
| АИР180S2 | 22/2940 | 71,463 | 150,071 | 250,119 | 4,288 |
| АИР180М2 | 30/2940 | 97,449 | 214,388 | 341,071 | 6,821 |
| АИР200М2 | 37/2950 | 119,780 | 275,493 | 383,295 | 16,769 |
| АИР200L2 | 45/2940 | 146,173 | 380,051 | 584,694 | 19,003 |
| АИР225М2 | 55/2955 | 177,750 | 408,824 | 710,998 | 35,550 |
| АИР250S2 | 75/2965 | 241,568 | 628,078 | 966,273 | 84,549 |
| АИР250М2 | 90/2960 | 290,372 | 784,003 | 1161,486 | 116,149 |
| АИР280S2 | 110/2960 | 354,899 | 887,247 | 1171,166 | 212,939 |
| АИР280М2 | 132/2964 | 425,304 | 1233,381 | 1488,563 | 297,713 |
| АИР315S2 | 160/2977 | 513,268 | 1231,844 | 1693,786 | 590,259 |
| АИР315М2 | 200/2978 | 641,370 | 1603,425 | 2116,521 | 962,055 |
| АИР355SMA2 | 250/2980 | 801,174 | 1281,879 | 2403,523 | 2163,171 |
| АИР160S4 | 15/1460 | 98,116 | 186,421 | 284,538 | 7,457 |
| АИР160М4 | 18,5/1460 | 121,010 | 229,920 | 350,930 | 11,375 |
| АИР180S4 | 22/1460 | 143,904 | 302,199 | 402,932 | 15,110 |
| АИР180М2 | 30/1460 | 196,233 | 470,959 | 588,699 | 27,276 |
| АИР200М4 | 37/1460 | 242,021 | 532,445 | 847,072 | 46,952 |
| АИР200L4 | 45/1460 | 294,349 | 647,568 | 941,918 | 66,229 |
| АИР225М4 | 55/1475 | 356,102 | 997,085 | 1317,576 | 145,289 |
| АИР250S4 | 75/1470 | 487,245 | 1218,112 | 1559,184 | 301,605 |
| АИР250М4 | 90/1470 | 584,694 | 1461,735 | 1871,020 | 467,755 |
| АИР280S4 | 110/1470 | 714,626 | 2072,415 | 2429,728 | 578,847 |
| АИР280М4 | 132/1485 | 848,889 | 1697,778 | 2886,222 | 1612,889 |
| АИР315S4 | 160/1487 | 1027,572 | 2568,931 | 3802,017 | 2363,416 |
| АИР315М4 | 200/1484 | 1287,062 | 3217,655 | 4247,305 | 3603,774 |
| АИР355SMA4 | 250/1488 | 1604,503 | 3690,356 | 4492,608 | 8985,215 |
| АИР355SMВ4 | 315/1488 | 2021,673 | 5054,183 | 5862,853 | 12534,375 |
| АИР355SMС4 | 355/1488 | 2278,394 | 5012,466 | 6151,663 | 15493,078 |
| АИР160S6 | 11/970 | 108,299 | 205,768 | 314,067 | 12,021 |
| АИР160М6 | 15/970 | 147,680 | 339,665 | 443,041 | 20,675 |
| АИР180М6 | 18,5/970 | 182,139 | 400,706 | 546,418 | 29,324 |
| АИР200М6 | 22/975 | 215,487 | 517,169 | 711,108 | 50,209 |
| АИР200L6 | 30/975 | 293,846 | 617,077 | 881,538 | 102,846 |
| АИР225М6 | 37/980 | 360,561 | 721,122 | 1081,684 | 186,050 |
| АИР250S6 | 45/986 | 435,852 | 784,533 | 1307,556 | 440,210 |
| АИР250М6 | 55/986 | 532,708 | 1012,145 | 1811,207 | 633,922 |
| АИР280S6 | 75/985 | 727,157 | 1454,315 | 2326,904 | 1090,736 |
| АИР280М6 | 90/985 | 872,589 | 1745,178 | 2792,284 | 1657,919 |
| АИР315S6 | 110/987 | 1064,336 | 1809,372 | 2873,708 | 4044,478 |
| АИР315М6 | 132/989 | 1274,621 | 2166,855 | 3696,400 | 5735,794 |
| АИР355МА6 | 160/993 | 1538,771 | 2923,666 | 3539,174 | 11848,540 |
| АИР355МВ6 | 200/993 | 1923,464 | 3654,582 | 4423,968 | 17118,832 |
| АИР355MLA6 | 250/993 | 2404,330 | 4568,228 | 5529,960 | 25485,901 |
| AИР355MLB6 | 315/992 | 3032,510 | 6065,020 | 7278,024 | 40029,133 |
| АИР160S8 | 7,5/730 | 98,116 | 156,986 | 235,479 | 13,246 |
| АИР160М8 | 11/730 | 1007,329 | 1712,459 | 2417,589 | 181,319 |
| АИР180М8 | 15/730 | 196,233 | 333,596 | 529,829 | 41,994 |
| АИР200М8 | 18,5/728 | 242,685 | 509,639 | 606,714 | 67,952 |
| АИР200L8 | 22/725 | 289,793 | 579,586 | 724,483 | 88,966 |
| АИР225М8 | 30/735 | 389,796 | 701,633 | 1052,449 | 214,388 |
| АИР250S8 | 37/738 | 478,794 | 861,829 | 1196,985 | 481,188 |
| АИР250М8 | 45/735 | 584,694 | 1052,449 | 1520,204 | 695,786 |
| АИР280S8 | 55/735 | 714,626 | 1357,789 | 2143,878 | 1071,939 |
| АИР280М8 | 75/735 | 974,490 | 1754,082 | 2728,571 | 1851,531 |
| АИР315S8 | 90/740 | 1161,486 | 1509,932 | 2671,419 | 4413,649 |
| АИР315М8 | 110/742 | 1415,768 | 2265,229 | 3964,151 | 6370,957 |
| АИР355SMA8 | 132/743 | 1696,635 | 2714,616 | 3902,261 | 12215,774 |
| AИР355SMB8 | 160/743 | 2056,528 | 3496,097 | 4935,666 | 18097,443 |
| AИР355MLA8 | 200/743 | 2570,659 | 4627,187 | 6940,781 | 26991,925 |
| AИР355MLB8 | 250/743 | 4498,654 | 7647,712 | 10796,770 | 58032,638 |
Расчет крутящего момента – формула
Примечание: при расчете стоит учесть коэффициент проскальзывания асинхронного двигателя.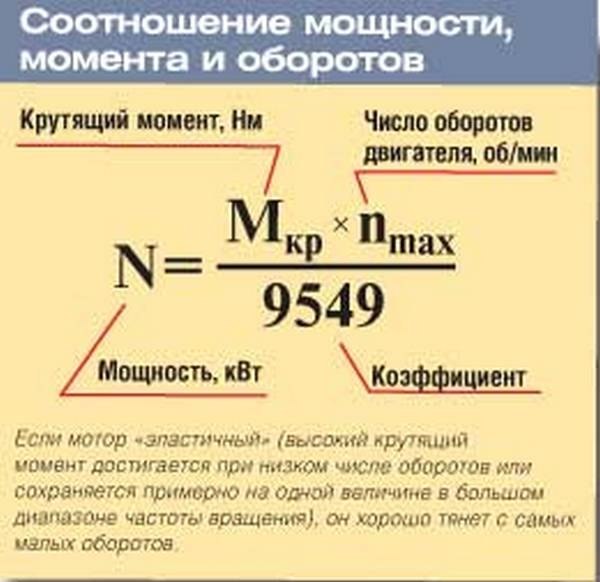 Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше.
Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше.
Расчет онлайн
Для расчета крутящего момента электродвигателя онлайн введите значение мощности ЭД и реальную угловую скорость (количество оборотов в минуту)
тут будет калькулятор
После расчета крутящего момента, посмотрите схемы подключения асинхронных электродвигателей звездой и треугольником на сайте «Слобожанского завода»
Мощность и вращающий момент электродвигателя. Что это такое?
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- СДПМП — синхронный двигатель c поверхностной установкой постоянных магнитов
- СДПМВ — синхронный двигатель со встроенными постоянными магнитами
- СРД-ПМ — синхронный реактивный двигатель с постоянными магнитами (синхронный гибридный двигатель)
- СДОВ — синхронный двигатель с обмоткой возбуждения
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8).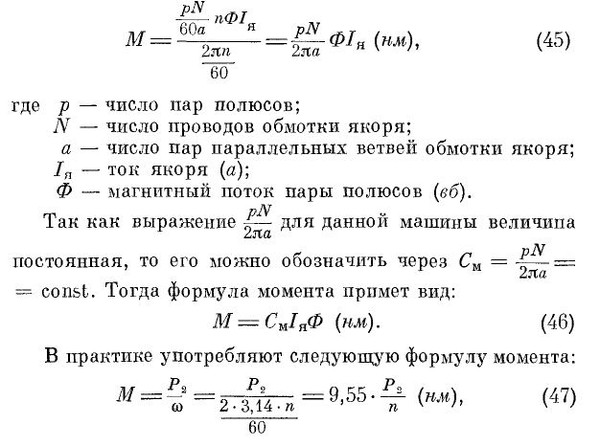 Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7].
Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7].
Области применения электродвигателей
Электродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии [6].
В двигателях постоянного тока вращающий момент определяется выражением М ≡ ФIя, т.е. он пропорционален потоку и току якоря. В асинхронном двигателе момент создается вращающимся потоком Ф и током ротора I2. Он может быть выражен
Следовательно, момент пропорционален потоку и активной слагающей тока ротора I2 cos Ψ2, так как только активная слагающая тока определяет мощность, а значит и момент.
На рис. 10-20 представлена схема включения короткозамкнутого двигателя. Если пустить двигатель, включив рубильник 1, то в первый момент пуска, когда п2= 0, a s = 1, наведенная в роторе 2 э. д. с. Е2 и пусковой ток I2п максимальны. Однако, пусковой момент Мп не будет максимальным, а в 2—2,5 раза меньше максимального. Векторная диаграмма для цепи ротора (рис. 10-21), построенная подобно изображенной на рис. 9-9, показывает причину этого.
д. с. Е2 и пусковой ток I2п максимальны. Однако, пусковой момент Мп не будет максимальным, а в 2—2,5 раза меньше максимального. Векторная диаграмма для цепи ротора (рис. 10-21), построенная подобно изображенной на рис. 9-9, показывает причину этого.
Рис 10-20. Схема включения короткозамкнутого асинхронного двигателя.
Обычно в роторе х2во много раз больше r2 и угол Ψ2, на который ток I2п отстает от э. д. с. Е2 велик. Поэтому активная слагающая тока I2п cos Ψ2, а значит и пусковой момент Мп малы. В современных асинхронных двигателях Мп/Мп = 1 — 1,5, хотя I2п/ Iн≈ 4,5—6,5.
Это же явление по другому объясняется на рис. 10-19 и 10-22.
Рис. 10-21. Векторная диаграмма в цепи ротора.
При описании принципа работы двигателя (рис.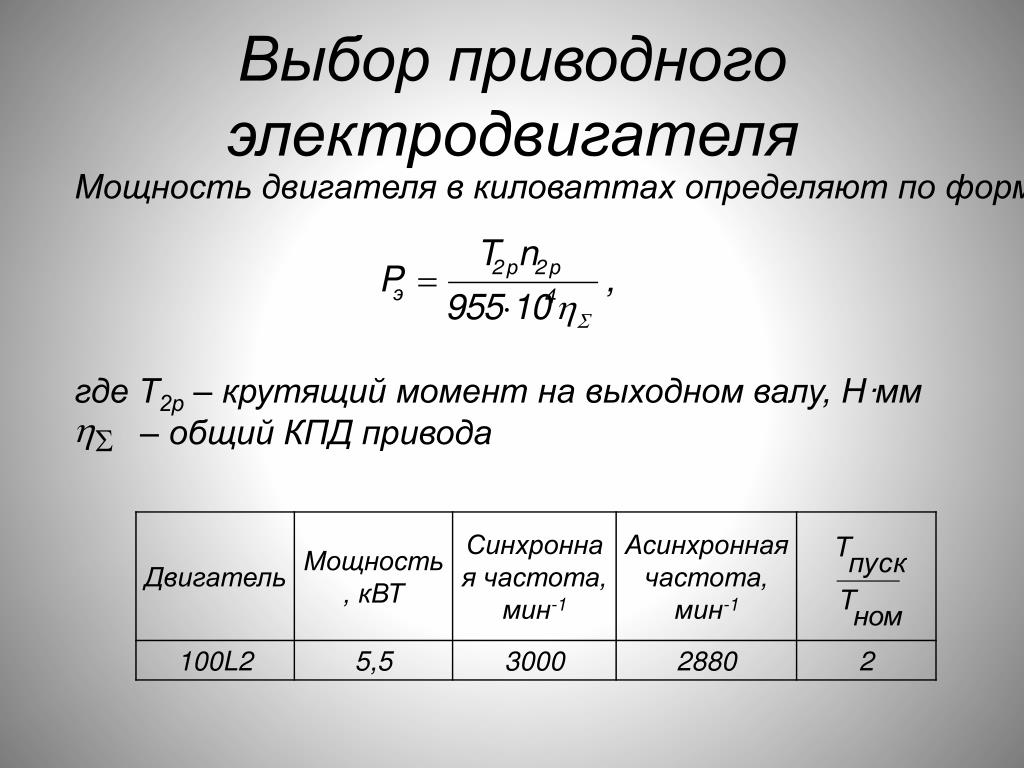 10-19) было предположено, что ток I2 совпадает по фазе с э. д. с. Е2, т. е. что он активный ( Ψ2 = 0). На рис. 10-22 представлен момент пуска, когда направление э. д. с. в проводах ротора соответствует обозначенному на рис. 10-19, а ток показан отстающим от э. д. с. на угол Ψ2. Тогда шесть проводов ротора (три под полюсом N и три под полюсом S) создают усилия, действующие в направлении вращения потока, а два провода вызывают противодействующие усилия. В результате этого вращающий момент будет тем меньше, чем больше сдвиг фаз между током I2 и э. д. с. E2.
10-19) было предположено, что ток I2 совпадает по фазе с э. д. с. Е2, т. е. что он активный ( Ψ2 = 0). На рис. 10-22 представлен момент пуска, когда направление э. д. с. в проводах ротора соответствует обозначенному на рис. 10-19, а ток показан отстающим от э. д. с. на угол Ψ2. Тогда шесть проводов ротора (три под полюсом N и три под полюсом S) создают усилия, действующие в направлении вращения потока, а два провода вызывают противодействующие усилия. В результате этого вращающий момент будет тем меньше, чем больше сдвиг фаз между током I2 и э. д. с. E2.
Рис. 10-22. Ток в роторе двигателя в момент пуска.
По мере увеличения скорости вращения ротора реактивное сопротивление обмотки ротора x2s = x2s уменьшается, а вместе с этим уменьшается угол Ψ2, так как сопротивление r2≈ const. Наступает такое положение (рис 10-21), когда при некотором скольжении sм ≈ 0,1—0,15 реактивное сопротивление x2s становится равным активному r2, угол Ψ — 45° и э. д. с. E2s уравновешивает два равных падения напряжения I 2r2 и I2x2s.В это время активная слагающая тока I2 cos Ψ2 и вращающий момент М м становятся максимальными, несмотря на некоторое уменьшение тока I2.
д. с. E2s уравновешивает два равных падения напряжения I 2r2 и I2x2s.В это время активная слагающая тока I2 cos Ψ2 и вращающий момент М м становятся максимальными, несмотря на некоторое уменьшение тока I2.
Обычно Мм/Мм = 1,8—2,5 и называется способностью к перегрузкe.
При дальнейшем разгоне ротора x2s становится значительно меньшим, чем r2, им можно пренебречь и считать ток ротора активным (I2 ≈ I2 cos Ψ 2). Так как E2s= E2s тоже продолжает уменьшаться, то вместе с током I2 уменьшается и вращающий момент.
Максимальная скоростьn вращения будет при холостом ходе двигателя и тогда n 2 ≈ n 1 , a s ≈ 0. Зависимость вращающего момента от скольжения М = f (s) представлена на рис. 10-23.
Зависимость вращающего момента от скольжения М = f (s) представлена на рис. 10-23.
Рис. 10-23. Зависимость вращающего момента двигателя от скольжения.
Нормальная работа двигателя возможна только на участке кривой при скольжениях s от нуля до sм, так как в этом случае при увеличении тормозного момента и значит s вращающий момент возрастает. На участке от s = sм до s = 1 работа двигателя неустойчива. Номинальный момент Мн соответствует обычно номинальному скольжению sн = 1—6%.
Поток Ф пропорционален напряжению U1, подводимому к трансформатору. Сказанное остается в силе и для асинхронного двигателя. Так как М ≡ ФI2 cos Ψ 2, то можно написать, что
Отсюда можно сделать очень важный для асинхронных двигателей вывод
т. е. вращающий момент пропорционален квадрату подведенного к статору напряжения. Таким образом, падение напряжения в сети, например до 0,9 U1н, вызовет уменьшение момента до 0,9 • 0,9 Мн= 0,81 Мн и нагруженный двига тель может остановиться. Указанным обстоятельством и объясняется, частично, нормирование падения напряжения в распределительных сетях, питающих асинхронные двигатели.
Таким образом, падение напряжения в сети, например до 0,9 U1н, вызовет уменьшение момента до 0,9 • 0,9 Мн= 0,81 Мн и нагруженный двига тель может остановиться. Указанным обстоятельством и объясняется, частично, нормирование падения напряжения в распределительных сетях, питающих асинхронные двигатели.
В практике потребителя часто интересует механическая характеристика двигателя
Рис. 10-24. Механическая характеристика двигателя.
Эта характеристика получается простым перестроением рис, 10-23 и показана на рис. 10-24, где рабочая часть обозначена сплошной линией. Кривая 1 для двига телей нормального исполнения показывает, что асинхронный двигатель обладает жесткой характеристикой скорости, подобно двигателю постоянного тока параллельного возбуждения. Асинхронный двигатель с фазным ротором для регулирования скорости вращения, например для крановых и подъемных устройств, имеет более мягкую характеристику (кривая 2).
РАБОЧИЙ ПРОЦЕСС АСИНХРОННОГО ДВИГАТЕЛЯ
Трехфазный ток I1протекая в трехфазной обмотке статора, создает н. F1, вращающуюся со скоростью п1 = (f1 •60)/p (рис. 10-4, 10-5). Трехфазный ток ротора I2 создает в трехфазной обмотке ротора н. с. F2 вращающуюся вокруг ротора со скоростью п3 = (f1 •60)/p . Сам ротор вращается в сто-
рону н. с. со скоростью n2. Тогда скорость вращения н. с F2 относительно статора равна:
Таким образом, обе н. с. F1 и F2 вращаются с одной скоростью n1, друг относительно друга неподвижны и создают сообща вращающийся магнитный поток Ф. Следовательно, все приведенное на рис. 9-8 и 9-9 справедливо и для асинхронного двигателя.
Следует отметить, что благодаря воздушному зазору между ротором и статором ток холостого хода (рис.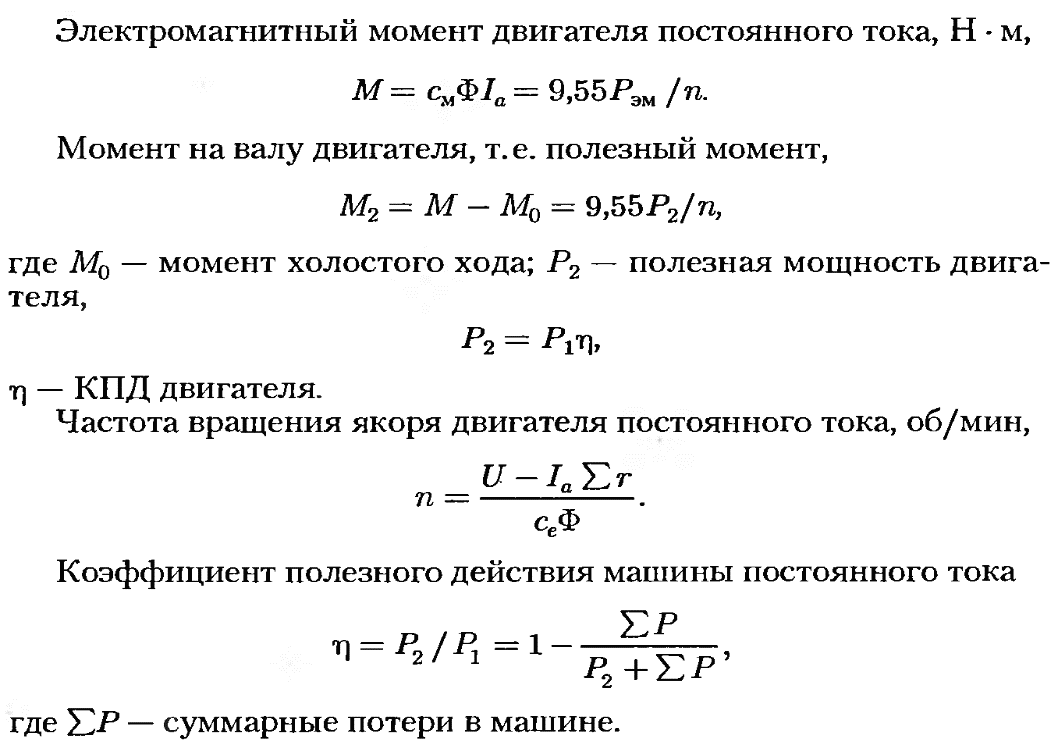 9-7) двигателя очень велик (20—40)% I1Н. Поэтому для улучшения cos φ1 сети двигатель необходимо нагружать полностью.
9-7) двигателя очень велик (20—40)% I1Н. Поэтому для улучшения cos φ1 сети двигатель необходимо нагружать полностью.
Статья на тему Вращающий момент электродвигателя
В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.
Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Конструкция электрического двигателя
Привод включает в себя:
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
Однако для линейных значений напряжения и тока она выглядит как
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент.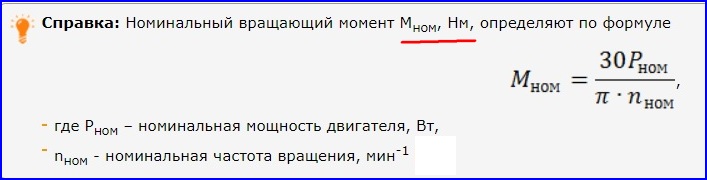 Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M — крутящий момент, Нм;
F — прикладываемая сила, H;
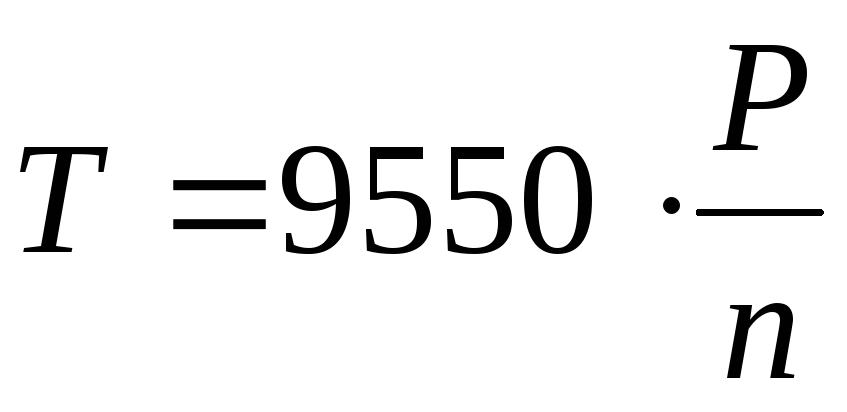
Для расчета номинального вращающего момента привода используют формулу
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин -1 .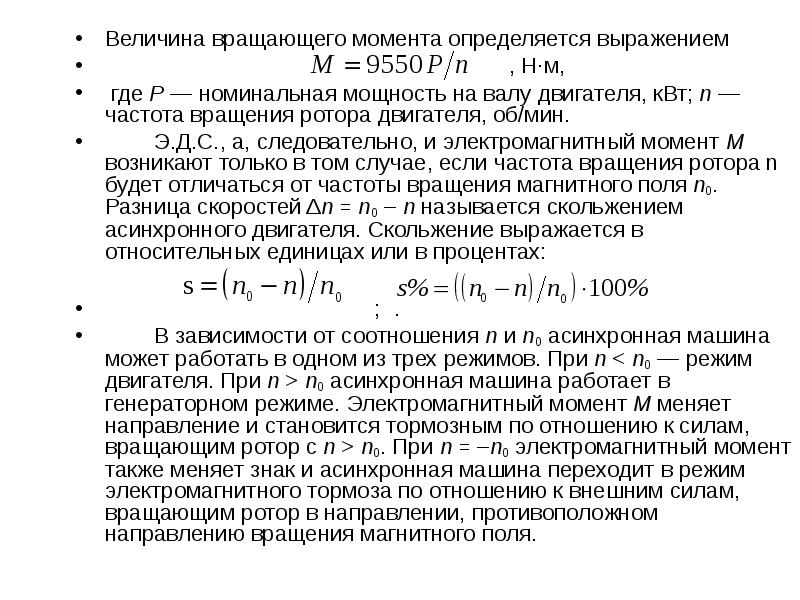
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Мощность двигателя
В общем смысле данный параметр представляет собой скалярную физическую величину, которая выражена в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм выполнит за определенную единицу времени. В электротехнике характеристика отображает полезную механическую мощность на центральном вале. Для обозначения показателя используют литеру P или W. Основной единицей измерения является Ватт. Общая формула расчета мощности электродвигателя может быть представлена как:
A — механическая (полезная) работа (энергия), Дж;
t — затраченное время, сек.
Механическая работа также является скалярной физической величиной, выражаемой действием силы на объект, и зависящей от направления и перемещения этого объекта. Она представляет собой произведение вектора силы на путь:
s — пройденное расстояние, м.
Она выражает дистанцию, которую преодолеет точка приложенной силы. Для вращательных движений она выражается как:
ds = r × d(teta), где:
teta — угол оборота, рад.
Таким образом можно вычислить угловую частоту вращения ротора:
omega = d(teta) ÷ dt.
Из нее следует формула мощности электродвигателя на валу: P = M × omega.
Коэффициент полезного действия электромотора
КПД — это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как «eta» и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
P1 — электрическая (подаваемая) мощность, Вт;
P2 — полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A — полезная работа, Дж;
Q — затраченная энергия, Дж.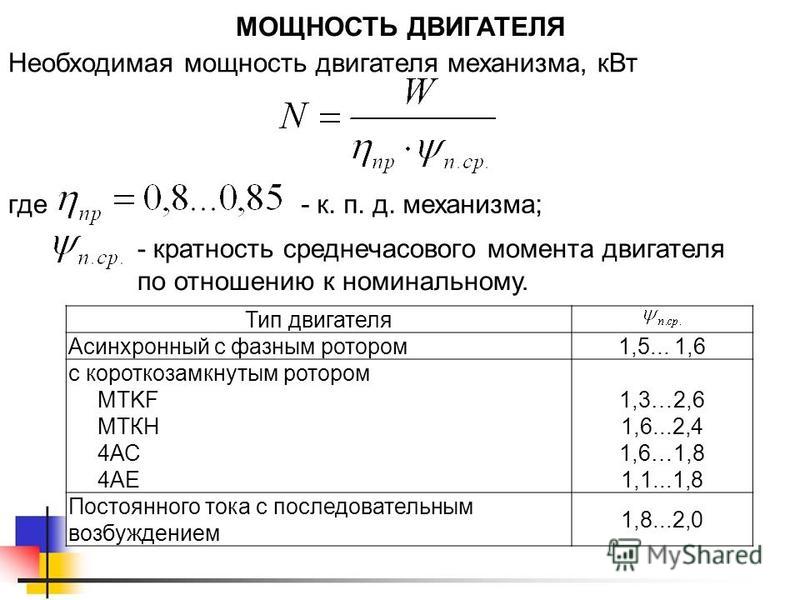
Чаще коэффициент вычисляют по формуле потребляемой мощности электродвигателя, так как эти показатели всегда легче измерить.
Снижение эффективности работы электродвигателя происходит по причине:
- Электрических потерь. Это происходит в результате нагрева проводников от прохождения по ним тока.
- Магнитных потерь. Вследствие излишнего намагничивания сердечника появляется гистерезис и вихревые токи, что важно учитывать в формуле мощности электродвигателя.
- Механических потерь. Они связаны с трением и вентиляцией.
- Дополнительных потерь. Они появляются из-за гармоник магнитного поля, так как статор и ротор имеют зубчатую форму. Также в обмотке присутствуют высшие гармоники магнитодвижущей силы.
Следует отметить, что КПД является одним из самых важных компонентов формулы расчета мощности электродвигателя, так как позволяет получить цифры, наиболее приближенные к действительности. В среднем этот показатель варьирует от 10% до 99%. Она зависит от конструктивного устройства механизма.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n — частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
Момент инерции
Этот показатель представляет собой скалярную физическую величину, которая отражает меру инертности вращательного движения вокруг собственной оси. При этом масса тела является величиной его инертности при поступательном движении. Основная характеристика параметра выражена распределением масс тела, которая равна сумме произведений квадрата расстояния от оси до базовой точки на массы объекта.В Международной системе единиц измерения он обозначается как кг·м 2 и имеет рассчитывается по формуле:
J = ∑ r 2 × dm, где
J — момент инерции, кг·м 2 ;
m — масса объекта, кг.
Моменты инерции и силы связаны между собой соотношением:
M — J × epsilon, где
epsilon — угловое ускорение, с -2 .
Показатель рассчитывается как:
epsilon = d(omega) × dt.
Таким образом, зная массу и радиус ротора, можно рассчитать параметры производительности механизмов. Формула мощности электродвигателя включает в себя все эти характеристики.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = P мех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Заключение
Электродвигатели находят применение практически во всех областях жизни человека: в быту, в производстве. Для правильного использования привода необходимо знать не только его номинальные характеристики, но и реальные. Это позволит повысить его эффективность и снизить затраты.
Крутящий момент электродвигателя
В соответствии с данными паспорта можно определить вращающий момент на валу электродвигателя и максимальное усилие, которое развивается на шкиве. Крутящий момент электродвигателя определяется с помощью нескольких параметров: величины магнитного потока, углового сдвига ЭДС и тока в роторе. Причем каждая величина зависит от момента скольжения и частоты с проводимым напряжением.
Крутящий момент вращения электродвигателя
- Непосредственно крутящий момент вращения электродвигателя можно определить по отношению электромагнитной мощности к угловой скорости ротора. Величина момента вращения прямо пропорциональна квадрату напряжения и при этом обратно пропорциональна квадрату частоты.
- Начальным значением крутящего момента электродвигателя считается тот момент, когда электродвигатель остается неподвижным. Минимальное значение – от развития скорости неподвижного момента до номинальной. При проведении расчетов максимальное значение крутящего момента определяется при самой высокой скорости, развиваемой валом электродвигателя.
- Для конкретных расчетов используются соответствующие формулы. Но при покупке электродвигателя расчеты производить нет необходимости, так как они уже произведены заводом-изготовителем и все параметры указаны в техническом паспорте к электродвигателю.
Определение направления вращения вала электродвигателя
Любой асинхронный электрический двигатель может вращаться по часовой стрелке и против нее. Данные параметры зависят от направления магнитного поля, создаваемого вокруг статора.
Если направление вращения вала электродвигателя не указано и опытное наблюдение невозможно, следует внимательно изучить маркировку на корпусе и схемы соединений, поставляемые производителем.
Следует отметить, монтаж любого электродвигателя должны проводить специалисты с соответствующим опытом и знаниями. Только тогда производитель гарантирует длительную и безопасную работы электромотора.
Направление вращения электродвигателя вы сможете узнать во время проведения монтажа или при периодическом техническом обслуживании, которое рекомендуется проводить систематически.
Покупая электродвигатель, продавец-консультант компании «РДЭ» даст подробную информацию по поводу всех интересующих Вас вопросов и поможет подобрать тот электродвигатель, который будет полностью соответствовать всем заявленным требованиям.
Просмотров: 4331
Дата: Воскресенье, 15 Декабрь 2013
7.2: Классическая механика
Область классической механики включает изучение тел в движении, особенно физические законы, касающиеся тел, находящихся под воздействием сил. Большинство механических аспектов проектирования роботов тесно связано с концепциями из этой области. В данном блоке описываются несколько ключевых применяемых концепций классической механики.
В данном блоке описываются несколько ключевых применяемых концепций классической механики.
СКОРОСТЬ — это мера того, насколько быстро перемещается объект. Обозначает изменение положения во времени (проще говоря, какое расстояние способен преодолеть объект за заданный период времени). Данная мера представлена в единицах расстояния, взятых в единицу времени, например, в количестве миль в час или футов в секунду.
ЧАСТОТА ВРАЩЕНИЯ – Скорость может также выражаться во вращении, то есть насколько быстро объект движется по кругу. Измеряется в единицах углового перемещения во времени (то есть в градусах в секунду), или в циклах вращения в единицу времени (например, в оборотах в минуту). Когда измерения представлены в оборотах в минуту (RPM), речь идет о частоте вращения. Есть речь идет об об/мин автомобильного двигателя, это означает, что измеряется скорость вращения двигателя.
УСКОРЕНИЕ – Изменение скорости во времени представляет собой ускорение. Чем больше ускорение, тем быстрее изменяется скорость. Если автомобиль развивает скорость от 0 до 60 миль в час за две секунды, в этом случае ускорение больше, чем когда он развивает скорость от 0 до 40 миль в час за тот же период времени. Ускорение — это мера изменения скорости. Отсутствие изменения означает отсутствие ускорения. Если объект движется с постоянной скоростью — ускорение отсутствует.
Чем больше ускорение, тем быстрее изменяется скорость. Если автомобиль развивает скорость от 0 до 60 миль в час за две секунды, в этом случае ускорение больше, чем когда он развивает скорость от 0 до 40 миль в час за тот же период времени. Ускорение — это мера изменения скорости. Отсутствие изменения означает отсутствие ускорения. Если объект движется с постоянной скоростью — ускорение отсутствует.
СИЛА — Ускорение является следствием воздействия сил, которые провоцируют изменение в движении, направлении или форме. Если вы нажимаете на объект, это означает, что вы прикладываете к нему силу. Робот ускоряется под воздействием силы, которую его колеса прикладывают к полу. Сила измеряется в фунтах или ньютонах.
Например, масса объекта воздействует на объект как сила вследствие гравитации (ускорение объекта в направлении центра Земли).
КРУТЯЩИЙ МОМЕНТ – Сила, направленная по кругу (вращение объекта), называется крутящим моментом. Крутящий момент — это вращающая сила. Если к объекту приложен крутящий момент, на границе первого возникает линейная сила. В примере с колесом, катящемся по земле, крутящий момент, приложенный к оси колеса, создает линейную силу на границе покрышки в точке ее контакта с поверхностью земли. Так и определяется крутящий момент — как линейная сила на границе круга. Крутящий момент определяется величиной силы, умноженной на расстояние от центра вращения (Сила х Расстояние = Крутящий момент). Крутящий момент измеряется в единицах силы, умноженной на расстояние, например, фунто-дюймах или ньютон-метрах.
Если к объекту приложен крутящий момент, на границе первого возникает линейная сила. В примере с колесом, катящемся по земле, крутящий момент, приложенный к оси колеса, создает линейную силу на границе покрышки в точке ее контакта с поверхностью земли. Так и определяется крутящий момент — как линейная сила на границе круга. Крутящий момент определяется величиной силы, умноженной на расстояние от центра вращения (Сила х Расстояние = Крутящий момент). Крутящий момент измеряется в единицах силы, умноженной на расстояние, например, фунто-дюймах или ньютон-метрах.
В примере с колесом, катящемся по земле, если известен крутящий момент, приложенный к оси с закрепленным на ней колесом, мы можем рассчитать количество силы, прикладываемой колесом к поверхности. В этом случае, радиус колеса является расстоянием силы от центра вращения.
Сила = Крутящий момент/Радиус колеса
В примере с рукой робота, удерживающей объект, мы можем рассчитать крутящий момент, требуемый для поднятия объекта. Если объект обладает массой, равной 1 ньютону, а рука имеет длину 0,25 метра (объект располагается на расстоянии 0,25 метра от центра вращения), тогда
Если объект обладает массой, равной 1 ньютону, а рука имеет длину 0,25 метра (объект располагается на расстоянии 0,25 метра от центра вращения), тогда
Крутящий момент = Сила х Расстояние = 1 ньютон х 0,25 метра = 0,25 ньютон-метров.
Это означает, что для удержания объекта в неподвижном положении, необходимо применить крутящий момент, равный 0,25 ньютон-метров. Чтобы переместить объект вверх, роботу необходимо приложить к нему крутящий момент, значение которого будет превышать 0,25 ньютон-метров, так как необходимо преодолеть силу гравитации. Чем больше крутящий момент робота, тем больше силы он прикладывает к объекту, тем больше ускорение объекта, и тем быстрее рука поднимет объект.
Пример 7.2
Пример 7.3
Для данных примеров, мы можем рассчитать крутящий момент, необходимый для подъем этих объектов.
Пример 7.2 — Крутящий момент = Сила х Расстояние = 1 ньютон х 0,125 метра = 0,125 ньютон-метров.
Для данного примера, длина рука равна половине длины руки из Примера 1, поэтому значение требуемого крутящего момента также в два раза меньше. Значение длины руки пропорционально значению требуемого крутящего момента. При равных исходных характеристиках объекта, чем короче рука, тем меньший крутящий момент необходим для подъема.
Значение длины руки пропорционально значению требуемого крутящего момента. При равных исходных характеристиках объекта, чем короче рука, тем меньший крутящий момент необходим для подъема.
Пример 7.3 — Крутящий момент = Сила * Расстояние = 1 ньютон х 0,5 метра = 0,5 ньютон-метров.
Для данного примера, длина рука равна удвоенной длине руки из Примера 1, поэтому значение требуемого крутящего момента также в два раза больше.
Еще одна точка зрения относительно ограниченного крутящего момента в соединении руки робота заключается в следующем: более короткая рука сможет поднять объект большей массы, чем более длинная рука; однако, для первой доступная высота подъема объекта будет меньше, чем для второй.
Пример 7.4
Пример 7.5
Эти примеры иллюстрируют руку робота, поднимающую объекты разной массы. Какова взаимосвязь с требуемым количеством крутящего момента?
Пример 4 — Крутящий момент = Сила х Расстояние = ½ ньютона х 0,25 метра = 0,125 ньютон-метров.
Пример 5 — Крутящий момент = Сила х Расстояние = 2 ньютона х 0,25 метра = 0,5 ньютон-метров.
Эти примеры иллюстрируют уменьшение значения требуемого крутящего момента по мере снижения массы объекта. Масса пропорциональна крутящему моменту, необходимому для ее подъема. Чем тяжелее объект, тем больше крутящий момент, требуемый для его подъема.
Проектировщики роботов должны обратить внимание на ключевые взаимосвязи между значениями крутящего момента, длины руки и массы объекта.
РАБОТА – Мера силы, приложенной на расстоянии, называется работой. Например, для удерживания объекта необходимо 10 фунтов силы. Далее, чтобы поднять этот объект на высоту 10 дюймов, требуется определенное количество работы. Количество работы, требуемое для подъема объекта на высоту 20 дюймов, удваивается. Работа также понимается как изменение энергии.
МОЩНОСТЬ — Большинство людей полагает, что мощность является термином из области электрики, но мощность также относится и к механике.
Мощность — это количество работы в единицу времени. Насколько быстро кто-то может выполнить работу?
В робототехнике принято понимать мощность как ограничение, так как соревновательные робототехнические системы имеют ограничения в части выходной мощности. Если роботу требуется поднять массу в 2 ньютона (прилагая 2 ньютона силы), скорость подъема будет ограничиваться количеством выходной мощности робота. Если робот способен произвести достаточное количество мощности, он сможет быстро поднять объект. Если он способен произвести лишь малое количество энергии, подъем объекта будет производиться медленно (либо не будет производиться вообще!).
Мощность определяется как Сила, умноженная на Скорость (насколько быстро выполняется толчок при постоянной скорости), и обычно выражается в Ваттах.
Мощность [Ватты] = Сила [Ньютоны] х Скорость [Метры в секунду]
1 Ватт = 1 (Ньютон х Метр) / Секунда
Как это применяется в соревновательной робототехнике? К проектам роботов применяются определенные ограничения. Проектировщики соревновательных роботов, использующие систему проектирования VEX Robotics Design, также должны учитывать физические ограничения, связанные с применением электромоторов. Электромотор обладает ограниченной мощностью, поэтому он может производить только определенное количество работы с заданной скоростью.
Проектировщики соревновательных роботов, использующие систему проектирования VEX Robotics Design, также должны учитывать физические ограничения, связанные с применением электромоторов. Электромотор обладает ограниченной мощностью, поэтому он может производить только определенное количество работы с заданной скоростью.
Примечание: все перспективные концепции имеют базовое описание. Более глубоко обсуждать эти физические свойства учащиеся будут в процессе обучения в ВУЗах, если выберут область STEM в качестве направления обучения.
Выбор электродвигателя для промышленных применений
При выборе электродвигателя следует учитывать множество факторов, в том числе целевое назначение, требующиеся эксплуатационные и механические характеристики, а также предполагаемые внешние воздействия. Возможные варианты таковы: электродвигатель переменного тока, электродвигатель постоянного тока (рис. 1) или серводвигатель (шаговый электродвигатель). Конечный выбор в основном зависит от того, для какого промышленного изделия подбирается электродвигатель, и от наличия особых потребностей.
Рис. 1. Электродвигатели постоянного тока хорошо подходят для применения в изделиях с невысокой стоимостью, низкой частотой вращения ротора или постоянным крутящим моментом — например, таких, как этот ленточный транспортер
В зависимости от характера нагрузки это может быть электродвигатель с постоянной или переменной частотой вращения и мощностью. Крутящий момент и мощность определяются величиной нагрузки, необходимой частотой вращения, а также разгоном и торможением (особенно если они быстрые и/или частые). Кроме того, следует учитывать требования к регулированию частоты вращения и управлению положением ротора.
Типы нагрузок электродвигателей
Существует четыре типа нагрузок электродвигателей промышленной автоматики:
- переменная мощность и постоянный крутящий момент;
- переменный крутящий момент и постоянная мощность;
- переменные мощность и крутящий момент;
- управление положением ротора или регулирование крутящего момента.

К изделиям с переменной мощностью и постоянным крутящим моментом относятся транспортеры, краны и редукторные насосы. Крутящий момент у них постоянен, так как нагрузка не меняется. Требующаяся мощность может различаться в зависимости от типа изделия, поэтому хорошим выбором в этом случае будут электродвигатели постоянного тока с постоянной частотой вращения ротора.
Пример изделия с переменным крутящим моментом и постоянной мощностью — станок для перемотки бумаги. Скорость подачи материала постоянна, поэтому мощность не меняется. Нагрузка, однако, меняется по мере увеличения диаметра рулона. Для небольших систем такого рода хорошо подойдут электродвигатели постоянного тока или серводвигатели. Другой важный фактор в этом случае — энергия рекуперации, которую следует учитывать при выборе размера электродвигателя или метода регулирования мощности. В более крупных системах, возможно, целесообразнее будет использовать электродвигатели переменного тока с датчиками перемещений, регулирование с обратной связью и приводы, работающие в четырех квадрантах.
Для вентиляторов, центробежных насосов и мешалок требуются переменные мощность и крутящий момент. С увеличением частоты вращения ротора электродвигателя растет и мощность на нагрузке, а с нею требующиеся номинальная мощность и крутящий момент. При нагрузках такого типа начинает играть важную роль КПД двигателя. В подобных изделиях применяются электродвигатели переменного тока с инверторным управлением и частотно-регулируемые приводы.
В линейных приводах, которые должны обеспечивать точное перемещение во множество положений, требуется управление положением или регулирование крутящего момента ротора с малой погрешностью, а зачастую и обратная связь для проверки правильности положения. Для этих целей лучше всего подходят серводвигатели и шаговые двигатели, но наряду с ними часто применяются электродвигатели постоянного тока с обратной связью или электродвигатели переменного тока с инверторным управлением и датчиком перемещения, которые позволяют с малой погрешностью регулировать крутящий момент на металлургических и бумагоделательных линиях, а также в других аналогичных применениях.
Типы электродвигателей
Электродвигатели бывают двух основных разновидностей — переменного и постоянного тока, но они, в свою очередь, разделяются более чем на три десятка типов.
Несмотря на большое разнообразие, промышленные применения электродвигателей имеют между собой много общего, и под влиянием рыночных механизмов практический ассортимент типов электродвигателей в большинстве применений сузился. Шесть наиболее распространенных типов электродвигателей, которые можно использовать в подавляющем большинстве изделий, — это бесколлекторные и коллекторные электродвигатели постоянного тока, электродвигатели переменного тока с короткозамкнутым и фазным ротором, серводвигатели и шаговые электродвигатели. Прочие типы электродвигателей применяются только в изделиях специального назначения.
Три основных типа изделий по режиму работы электродвигателя
Три основных типа изделий по режиму работы электродвигателя — это изделия с постоянной частотой вращения, переменной частотой вращения и управлением положением (или регулированием крутящего момента) ротора. В различных изделиях промышленной автоматики требуются разные режимы, и набор вопросов, на который приходится отвечать при выборе электродвигателя, может также различаться (рис. 2).
В различных изделиях промышленной автоматики требуются разные режимы, и набор вопросов, на который приходится отвечать при выборе электродвигателя, может также различаться (рис. 2).
Рис. 2. Асинхронные электродвигатели переменного тока часто выбирают для промышленных машин с вращательным движением рабочего органа
Например, если требующаяся максимальная частота вращения ротора меньше номинальной, может понадобиться редуктор. Возможно, для этой цели удастся подобрать более компактный электродвигатель, частота вращения ротора которого будет обеспечивать более высокий КПД. В Интернете есть большое количество информации о том, как выбирать электродвигатель по размеру, но пользователям необходимо принимать во внимание и другие факторы. Для расчета момента инерции нагрузки, крутящего момента и частоты вращения ротора требуется знать такие параметры, как полная масса и размер (радиус) нагрузки, а также коэффициент трения, потери на редукторе и цикл работы машины. Кроме того, во избежание перегрева электродвигателя необходимо учитывать изменение нагрузки, темп разгона или торможения и рабочий цикл изделия.
Кроме того, во избежание перегрева электродвигателя необходимо учитывать изменение нагрузки, темп разгона или торможения и рабочий цикл изделия.
Определившись с типом и размером электродвигателя, пользователю нужно также учесть влияние внешних факторов и выбрать исполнение — например, открытое или в кожухе из нержавеющей стали для работы во влажной среде.
Выбор электродвигателя: три вопроса
Даже после того, как все эти решения приняты, пользователю необходимо ответить на следующие три вопроса, прежде чем сделать окончательный выбор.
Требуется ли постоянная частота вращения ротора?
В изделиях с постоянной частотой вращения ротора электродвигатель часто работает на приблизительно установленной частоте, а характеристики разгона и торможения роли практически не играют. В этом случае обычно применяется релейное управление с питанием непосредственно от сети. Цепи управления часто состоят из ответвления с предохранителем и контактором, устройства защиты от перегрузки при пуске и ручного регулятора электродвигателя или устройства плавного пуска.
Для изделий с постоянной частотой вращения ротора подходят электродвигатели переменного и постоянного тока. Электродвигатели постоянного тока обеспечивают номинальный крутящий момент при нулевой частоте вращения; этот тип электродвигателей очень популярен. Электродвигатели переменного тока — тоже хороший выбор, так как они характеризуются высоким коэффициентом мощности и нетребовательны в обслуживании. Серводвигатель или шаговый двигатель с высокими эксплуатационными характеристиками был бы излишним для простого изделия.
Требуется ли переменная частота вращения ротора?
Изделия с переменной частотой вращения ротора обычно требуют изменения линейной скорости и частоты вращения с малой погрешностью, а также четко определенных характеристик разгона и ускорения. Уменьшение частоты вращения ротора в таких изделиях, как вентиляторы и центробежные насосы, часто позволяет повысить КПД за счет согласования мощности с нагрузкой вместо работы на максимальной частоте с пропорциональным регулированием или демпфированием. Это важно для конвейерных систем, например линий бутылочного розлива.
Это важно для конвейерных систем, например линий бутылочного розлива.
Электродвигатели как переменного, так и постоянного тока с приводами соответствующего типа эффективно работают в изделиях с переменной частотой вращения ротора. На протяжении длительного времени привод с электродвигателем постоянного тока был единственным вариантом для изделий с переменной частотой вращения ротора, и компоненты для этой комбинации хорошо отработаны и проверены временем. Даже сейчас электродвигатели постоянного тока широко применяются в маломощных (менее 1 л. с.) изделиях этого типа, а также оказываются полезными в изделиях с низкой частотой вращения ротора, так как обеспечивают номинальный крутящий момент на низкой частоте вращения и постоянный крутящий момент в широком диапазоне частот.
Слабой стороной электродвигателей постоянного тока может быть обслуживание, так как во многих из них для коммутации используются щетки, которые со временем изнашиваются от контакта с подвижными частями. Бесколлекторные электродвигатели постоянного тока свободны от этого недостатка, но дороже в приобретении, а их ассортимент — уже.
Бесколлекторные электродвигатели постоянного тока свободны от этого недостатка, но дороже в приобретении, а их ассортимент — уже.
Избавлены от этой проблемы и асихронные электродвигатели переменного тока, а вкупе с частотно-регулируемым приводом (рис. 3) они позволяют получить более высокий КПД в изделиях мощностью более 1 л. с., таких как вентиляторы и насосы. Некоторые типы приводов предусматривают обратную связь по положению. Если этого требует характер изделия, можно дополнить электродвигатель датчиком перемещений и выбрать привод, использующий сигнал от этого датчика для обратной связи. Такая конфигурация может обеспечить такое же регулирование частоты вращения ротора, как в серводвигателе.
Рис. 3. Сочетание электродвигателя постоянного тока с частотно-регулируемым приводом широко применяется для повышения КПД и эффективно работает в разнообразных изделиях с переменной частой вращения ротора
Требуется ли управление положением ротора?
Управление положением ротора электродвигателя с малой погрешностью обеспечивается путем непрерывной проверки его положения в процессе вращения. В изделиях, где требуется, например, задавать положение линейного привода, можно применять шаговый электродвигатель с обратной связью или без таковой, а также серводвигатель со встроенной обратной связью.
В изделиях, где требуется, например, задавать положение линейного привода, можно применять шаговый электродвигатель с обратной связью или без таковой, а также серводвигатель со встроенной обратной связью.
Шаговый электродвигатель предназначен для перемещения в заданное положение на умеренной скорости с последующим сохранением этого положения. Шаговый электродвигатель без обратной связи по положению обеспечивает весьма точное управление положением ротора, если правильно выбрать его размер, а также перемещение на точно заданное число шагов (если только он не столкнется с изменением нагрузки, превышающим его возможности).
С ростом требуемой частоты вращения и динамических нагрузок шаговый привод без обратной связи может уже не обеспечить нужных характеристик системы, и тогда понадобится шаговый привод с обратной связью или сервопривод.
Система с обратной связью обеспечивает точное высокоскоростное перемещение по заданному профилю и регулирование положения ротора. Серводвигатель обеспечивает больший крутящий момент на высоких частотах вращения в сравнении с шаговым электродвигателем, а также эффективнее работает в изделиях, характеризующихся высокими динамическими нагрузками или сложным характером перемещения.
Для быстрого и/или резкого перемещения с малым перерегулированием по положению момент инерции нагрузки должен быть как можно лучше согласован с моментом инерции серводвигателя. Рассогласование в пропорции до 10:1 приемлемо в некоторых применениях, но оптимальным является согласование 1:1.
Уменьшение частоты вращения посредством редуктора — оптимальный способ решить проблему рассогласования моментов инерции, поскольку момент инерции нагрузки обратно пропорционален квадрату передаточного отношения редуктора. При этом в расчетах необходимо учитывать момент инерции редуктора.
Знание особенностей изделия и электродвигателя
Производители предлагают широкий ассортимент электродвигателей для промышленных применений. Шаговые электродвигатели, серводвигатели, электродвигатели переменного и постоянного тока пригодны для использования в большинстве типов изделий промышленной автоматики, но оптимальный выбор электродвигателя зависит от характера изделия. Пользователям следует выбирать электродвигатель для своего изделия, учитывая, какой требуется режим работы — постоянная частота вращения, переменная частота вращения или управление положением ротора, — и в тесном взаимодействии с поставщиками электродвигателя и привода.
Вконтакте
Google+
Электродвигатель постоянного тока. Теория и практика.
Электродвигатель постоянного тока имеет линейную зависимость скорости вращения от напряжения. Например, если напряжения достаточно для запуска вращения электродвигателя постоянного тока, то выходной вал будет вращаться в соответствии с величиной подаваемого напряжения. Если взять соотношение подаваемого напряжения, номинального напряжения, и умножить это число на скорость без нагрузки, то мы получим рабочую скорость вращения.
Если измерить и изобразить графически электрический ток и крутящий момент, то получится прямая линия, демонстрирующая пропорциональное соотношение. Таким образом, если необходимо увеличить крутящий момент, то нужно увеличить и ток. Для совместного графического изображения крутящего момента и скорости, потребуются всего для параметра в качестве исходных данных: это скорость без нагрузки и начальный пусковой момент.
С первого взгляда может показаться, что подбор электродвигателя постоянного тока – это дело сложное и непонятное, ведь нужно учитывать множество факторов, таких как габариты, нагрузку, режим работы, условия эксплуатации и т.д. В данной статье мы попробуем облегчить процесс подбора, для этого нужно разобраться в работе электродвигателя постоянного тока.
Итак, если Вы стремитесь к надёжному, выдержавшему проверку временем, доступному по цене электродвигателю, тогда электродвигатель постоянного тока PMDC – это то, что Вам нужно. Главным преимуществом данного двигателя является его простота в работе.
Электродвигатель постоянного тока PMDC работает от постоянного напряжения, и его можно подключить даже к бытовой батарее от карманного фонарика.
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Почему? Проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки. При этом, чтобы не произошло торможения после поворота на 90 градусов, нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки. При этом, чтобы не произошло торможения после поворота на 90 градусов, нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Принцип действия электродвигателя постоянного тока основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось с постоянной скоростью. Если изменить направление тока, то, согласно правилу левой руки, изменится направление вращения ротора (выходного вала электродвигателя).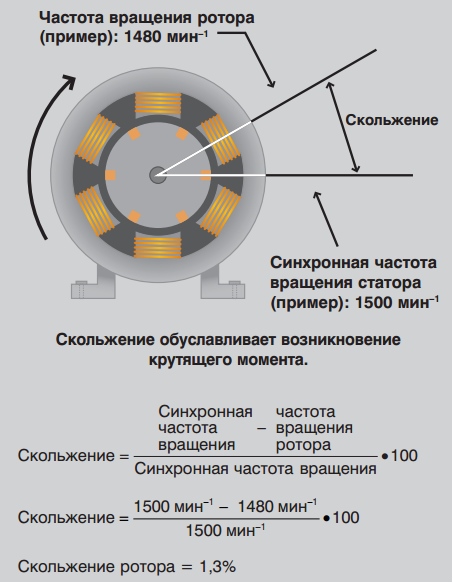
Следствием вращения ротора является механическая энергия, которая измеряется в Ваттах. Механическая энергия – это результат умножения крутящего момента на расстояние вращения на единицу времени/скорости. Крутящий момент – это вектор нагрузки, который вращается вокруг своей оси и обратно пропорционален скорости (см. формулу ниже):
Pмехан. = Мω,
Форм. 1, где P = механическая энергия, М = крутящий момент, ω = скорость вращения.
Величина тока, проходящего через обмотку, напрямую влияет на крутящий момент электродвигателя. Регулируя напряжение источника электропитания, можно пропорционально изменить скорость вращения электродвигателя, но скорость вращения выходного вала будет уменьшена, поскольку крутящий момент будет увеличиваться. Существуют также и другие факторы, которые могут повлиять на уменьшение тех или иных параметров, например, статическое трение рассматривается как момент сил трения, которое электродвигатель должен преодолеть, чтобы вал начал вращаться. Также существуют потери в коллекторном механизме. Помимо этого, существует также потеря в обмотке, которая выражается в нагреве, называемая как I2R. Формула электрической мощности представлена ниже:
Также существуют потери в коллекторном механизме. Помимо этого, существует также потеря в обмотке, которая выражается в нагреве, называемая как I2R. Формула электрической мощности представлена ниже:
Pэлектр = I²R,
Форм. 2, где P = электрическая мощность, I = ток, R = сопротивление.
Следует помнить, что из-за упомянутых потерь зависимость скорости вращения и крутящего момента от величины подаваемого напряжения и силы тока могут быть признана линейной с некоторой погрешностью.
Крутящий момент формула
Крутящий момент электродвигателя – расчет, формула, таблица
Крутящий момент электродвигателя – это сила вращения его вала. Именно момент вращения определяет мощность Вашего двигателя. Измеряется в ньютонах на метр или в килограмм-силах на метр.
Крутящий момент электродвигателя таблица
В данной таблице собраны крутящие моменты наиболее распространенных в Украине электродвигателей АИР, а также требуемый при пуске – пусковой, максимально допустимый для данного типа электродвигателя – максимальный крутящий момент и момент инерции двигателей АИР (усилие важное при подборе электромагнитного тормоза, например)
Маркировка | кВт/об | Мном, Нм | Мпуск, Нм | Ммакс, Нм |
Минн, Нм |
АИР56А2 | 0,18/2730 | 0,630 | 1,385 | 1,385 | 1,133 |
АИР56В2 | 0,25/2700 | 0,884 | 1,945 | 1,945 | 1,592 |
АИР56А4 | 0,12/1350 | 0,849 | 1,868 | 1,868 | 1,528 |
АИР56В4 | 0,18/1350 | 1,273 | 2,801 | 2,801 | 2,292 |
АИР63А2 | 0,37/2730 | 1,294 | 2,848 | 2,848 | 2,330 |
АИР63В2 | 0,55/2730 | 1,924 | 4,233 | 4,233 | 3,463 |
АИР63А4 | 0,25/1320 | 1,809 | 3,979 | 3,979 | 3,256 |
АИР63В4 | 0,37/1320 | 2,677 | 5,889 | 5,889 | 4,818 |
АИР63А6 | 0,18/860 | 1,999 | 4,397 | 4,397 | 3,198 |
АИР63В6 | 0,25/860 | 2,776 | 6,108 | 6,108 | 4,442 |
АИР71А2 | 0,75/2820 | 2,540 | 6,604 | 6,858 | 4,064 |
АИР71В2 | 1,1/2800 | 3,752 | 8,254 | 9,004 | 6,003 |
АИР71А4 | 0,55/1360 | 3,862 | 8,883 | 9,269 | 6,952 |
АИР71В4 | 0,75/1350 | 5,306 | 13,264 | 13,794 | 12,733 |
АИР71А6 | 0,37/900 | 3,926 | 8,245 | 8,637 | 6,282 |
АИР71В6 | 0,55/920 | 5,709 | 10,848 | 12,560 | 9,135 |
АИР71В8 | 0,25/680 | 3,511 |
5,618 | 6,671 | 4,915 |
АИР80А2 | 1,5/2880 | 4,974 | 10,943 | 12,932 | 8,953 |
АИР80В2 | 2,2/2860 | 7,346 | 15,427 | 19,100 | 13,223 |
АИР80А4 | 1,1/1420 | 7,398 | 16,275 | 17,755 | 12,576 |
АИР80В4 | 1,5/1410 | 10,160 | 22,351 | 24,383 | 17,271 |
АИР80А6 | 0,75/920 | 7,785 | 16,349 | 17,128 | 12,457 |
АИР80В6 | 1,1/920 | 11,418 | 25,121 | 26,263 | 20,553 |
АИР80А8 | 0,37/680 | 5,196 | 10,393 | 11,952 | 7,275 |
АИР80В8 | 0,55/680 | 7,724 | 15,449 | 16,221 | 10,814 |
АИР90L2 | 3/2860 | 10,017 | 23,040 | 26,045 | 17,030 |
АИР90L4 | 2,2/1430 | 14,692 | 29,385 | 35,262 | 29,385 |
АИР90L6 | 1,5/940 | 15,239 | 30,479 | 35,051 | 28,955 |
АИР90LА8 | 0,75/700 | 10,232 | 15,348 | 20,464 | 15,348 |
АИР90LВ8 | 1,1/710 | 14,796 | 22,194 | 32,551 | 22,194 |
АИР100S2 | 4/2850 | 13,404 | 26,807 | 32,168 | 21,446 |
АИР100L2 | 5,5/2850 | 18,430 | 38,703 | 44,232 | 29,488 |
АИР100S4 | 3/1410 | 20,319 | 40,638 | 44,702 | 32,511 |
АИР100L4 | 4/1410 | 27,092 | 56,894 | 65,021 | 43,348 |
АИР100L6 | 2,2/940 | 22,351 | 42,467 | 49,172 | 35,762 |
АИР100L8 | 1,5/710 | 20,176 | 32,282 | 40,352 | 30,264 |
АИР112М2 | 7,5/2900 | 24,698 | 49,397 | 54,336 | 39,517 |
АИР112М4 | 5,5/1430 | 36,731 | 73,462 | 91,827 | 58,769 |
АИР112МА6 | 3/950 | 30,158 | 60,316 | 66,347 | 48,253 |
АИР112МВ6 | 4/950 | 40,211 | 80,421 | 88,463 | 64,337 |
АИР112МА8 | 2,2/700 | 30,014 | 54,026 | 66,031 | 42,020 |
АИР112МВ8 | 3/700 | 40,929 | 73,671 | 90,043 | 57,300 |
АИР132М2 | 11/2910 | 36,100 | 57,759 | 79,419 | 43,320 |
АИР132S4 | 7,5/1440 | 49,740 | 99,479 | 124,349 | 79,583 |
АИР132М4 | 11/1450 | 72,448 | 173,876 | 210,100 | 159,386 |
АИР132S6 | 5,5/960 | 54,714 | 109,427 | 120,370 | 87,542 |
АИР132М6 | 7,5/950 | 75,395 | 150,789 | 165,868 | 120,632 |
АИР132S8 | 4/700 | 54,571 | 98,229 | 120,057 | 76,400 |
АИР132М8 | 5,5/700 | 75,036 | 135,064 | 165,079 | 105,050 |
АИР160S2 | 15/2940 | 48,724 | 97,449 | 155,918 | 2,046 |
АИР160М2 | 18,5/2940 | 60,094 | 120,187 | 192,299 | 2,884 |
АИР180S2 | 22/2940 | 71,463 | 150,071 | 250,119 | 4,288 |
АИР180М2 | 30/2940 | 97,449 | 214,388 | 341,071 | 6,821 |
АИР200М2 | 37/2950 | 119,780 | 275,493 | 383,295 | 16,769 |
АИР200L2 | 45/2940 | 146,173 | 380,051 | 584,694 | 19,003 |
АИР225М2 | 55/2955 | 177,750 | 408,824 | 710,998 | 35,550 |
АИР250S2 | 75/2965 | 241,568 | 628,078 | 966,273 | 84,549 |
АИР250М2 | 90/2960 | 290,372 | 784,003 | 1161,486 | 116,149 |
АИР280S2 | 110/2960 | 354,899 | 887,247 | 1171,166 | 212,939 |
АИР280М2 | 132/2964 | 425,304 | 1233,381 | 1488,563 | 297,713 |
АИР315S2 | 160/2977 | 513,268 | 1231,844 | 1693,786 | 590,259 |
АИР315М2 | 200/2978 | 641,370 | 1603,425 | 2116,521 | 962,055 |
АИР355SMA2 | 250/2980 | 801,174 | 1281,879 | 2403,523 | 2163,171 |
АИР160S4 | 15/1460 | 98,116 | 186,421 | 284,538 | 7,457 |
АИР160М4 | 18,5/1460 | 121,010 | 229,920 | 350,930 | 11,375 |
АИР180S4 | 22/1460 | 143,904 | 302,199 | 402,932 | 15,110 |
АИР180М2 | 30/1460 | 196,233 | 470,959 | 588,699 | 27,276 |
АИР200М4 | 37/1460 | 242,021 | 532,445 | 847,072 | 46,952 |
АИР200L4 | 45/1460 | 294,349 | 647,568 | 941,918 | 66,229 |
АИР225М4 | 55/1475 | 356,102 | 997,085 | 1317,576 | 145,289 |
АИР250S4 | 75/1470 | 487,245 | 1218,112 | 1559,184 | 301,605 |
АИР250М4 | 90/1470 | 584,694 | 1461,735 | 1871,020 | 467,755 |
АИР280S4 | 110/1470 | 714,626 | 2072,415 | 2429,728 | 578,847 |
АИР280М4 | 132/1485 | 848,889 | 1697,778 | 2886,222 | 1612,889 |
АИР315S4 | 160/1487 | 1027,572 | 2568,931 | 3802,017 | 2363,416 |
АИР315М4 | 200/1484 | 1287,062 | 3217,655 | 4247,305 | 3603,774 |
АИР355SMA4 | 250/1488 | 1604,503 | 3690,356 | 4492,608 | 8985,215 |
АИР355SMВ4 | 315/1488 | 2021,673 | 5054,183 | 5862,853 | 12534,375 |
АИР355SMС4 | 355/1488 | 2278,394 | 5012,466 | 6151,663 | 15493,078 |
АИР160S6 | 11/970 | 108,299 | 205,768 | 314,067 | 12,021 |
АИР160М6 | 15/970 | 147,680 | 339,665 | 443,041 | 20,675 |
АИР180М6 | 18,5/970 | 182,139 | 400,706 | 546,418 | 29,324 |
АИР200М6 | 22/975 | 215,487 | 517,169 | 711,108 | 50,209 |
АИР200L6 | 30/975 | 293,846 | 617,077 | 881,538 | 102,846 |
АИР225М6 | 37/980 | 360,561 | 721,122 | 1081,684 | 186,050 |
АИР250S6 | 45/986 | 435,852 | 784,533 | 1307,556 | 440,210 |
АИР250М6 | 55/986 | 532,708 | 1012,145 | 1811,207 | 633,922 |
АИР280S6 | 75/985 | 727,157 | 1454,315 | 2326,904 | 1090,736 |
АИР280М6 | 90/985 | 872,589 | 1745,178 | 2792,284 | 1657,919 |
АИР315S6 | 110/987 | 1064,336 | 1809,372 | 2873,708 | 4044,478 |
АИР315М6 | 132/989 | 1274,621 | 2166,855 | 3696,400 | 5735,794 |
АИР355МА6 | 160/993 | 1538,771 | 2923,666 | 3539,174 | 11848,540 |
АИР355МВ6 | 200/993 | 1923,464 | 3654,582 | 4423,968 | 17118,832 |
АИР355MLA6 | 250/993 | 2404,330 | 4568,228 | 5529,960 | 25485,901 |
AИР355MLB6 | 315/992 | 3032,510 | 6065,020 | 7278,024 | 40029,133 |
АИР160S8 | 7,5/730 | 98,116 | 156,986 | 235,479 | 13,246 |
АИР160М8 | 11/730 | 1007,329 | 1712,459 | 2417,589 | 181,319 |
АИР180М8 | 15/730 | 196,233 | 333,596 | 529,829 | 41,994 |
АИР200М8 | 18,5/728 | 242,685 | 509,639 | 606,714 | 67,952 |
АИР200L8 | 22/725 | 289,793 | 579,586 | 724,483 | 88,966 |
АИР225М8 | 30/735 | 389,796 | 701,633 | 1052,449 | 214,388 |
АИР250S8 | 37/738 | 478,794 | 861,829 | 1196,985 | 481,188 |
АИР250М8 | 45/735 | 584,694 | 1052,449 | 1520,204 | 695,786 |
АИР280S8 | 55/735 | 714,626 | 1357,789 | 2143,878 | 1071,939 |
АИР280М8 | 75/735 | 974,490 | 1754,082 | 2728,571 | 1851,531 |
АИР315S8 | 90/740 | 1161,486 | 1509,932 | 2671,419 | 4413,649 |
АИР315М8 | 110/742 | 1415,768 | 2265,229 | 3964,151 | 6370,957 |
АИР355SMA8 | 132/743 | 1696,635 | 2714,616 | 3902,261 | 12215,774 |
AИР355SMB8 | 160/743 | 2056,528 | 3496,097 | 4935,666 | 18097,443 |
AИР355MLA8 | 200/743 | 2570,659 | 4627,187 | 6940,781 | 26991,925 |
AИР355MLB8 | 250/743 | 4498,654 | 7647,712 | 10796,770 | 58032,638 |
Номинальный
Номинальный — значение момента при стандартном режиме работы и стандартной номинальной нагрузке на двигатель.
Пусковой
Пусковой – это табличное значение. Сила вращения, которую в состоянии развивать электродвигатель при пуске.
При подборе эл двигателя убедитесь, что данный параметр выше, чем статический момент Вашего оборудования — насоса, либо вентилятора и т.д. В противном случае электродвигатель не сможет запуститься, что чревато перегревом и перегоранием обмотки.
Максимальный
Максимальный – предельное значение, по достижении которого нагрузка уравновесит двигатель и остановит его.
Расчет крутящего момента – формула
Примечание: при расчете стоит учесть коэффициент проскальзывания асинхронного двигателя. Номинальное количество оборотов двигателя не совпадает с реальным. Точное количество оборотов вы сможете найти, зная маркировку, в таблице выше.
Расчет онлайн
Для расчета крутящего момента электродвигателя онлайн введите значение мощности ЭД и реальную угловую скорость (количество оборотов в минуту)
тут будет калькулятор
После расчета крутящего момента, посмотрите схемы подключения асинхронных электродвигателей звездой и треугольником на сайте «Слобожанского завода»
Что надо знать про мощность и крутящий момент в автомобиле
Мощность двигателя – это величина, показывающая, какую работу способен совершить мотор в единицу времени. То есть то количество энергии, которую двигатель передает на трансмиссию за определенный временной промежуток. Измеряется в киловаттах (кВт) или лошадиных силах (л. с.).
То есть то количество энергии, которую двигатель передает на трансмиссию за определенный временной промежуток. Измеряется в киловаттах (кВт) или лошадиных силах (л. с.).
Как рассчитывается мощность двигателя?
Расчет мощности мотора проводится несколькими способами. Самый доступный способ – через крутящий момент. Умножаем крутящий момент на угловую скорость – получаем мощность двигателя.
N_дв=M∙ω=2∙π∙M∙n_дв
где:
N_дв – мощность двигателя, кВт;
M – крутящий момент, Нм;
ω – угловая скорость вращения коленчатого вала, рад/сек;
π – математическая постоянная, равная 3,14;
n_дв – частота вращения двигателя, мин-1.
Мощность рассчитывается и через среднее эффективное давление. Камера сгорания имеет определенный объем. Разогретые газы воздействуют на поршень в цилиндре с определенным давлением. Двигатель вращается с некоторой частотой. Произведение объема двигателя, среднего эффективного давления и частоты вращения, поделенное на 120, и даст теоретическую мощность двигателя в кВт.
N_дв=(V_дв∙P_эфф∙n_дв)/120
где:
V_дв – объем двигателя, см3;
P_эфф – эффективное давление в цилиндрах, МПа;
120 – коэффициент, применяемый для расчета мощности четырехтактного двигателя (у двухтактных ДВС этот коэффициент равен 60).
Для расчета лошадиных сил киловатты умножаем на 0,74.
N_(дв л.с.)=N_дв∙0,74
где:
N_дв л.с. – мощность двигателя в лошадиных силах, л. с.
Другие формулы мощности двигателя используются в реальных расчетах реже. Эти формулы включают в себя специфичные переменные. И чтобы измерить мощность двигателя по другим методикам, нужно знать производительность форсунок или массу потребленного двигателем воздуха.
На практике расчет мощности автопроизводители выполняют эмпирическим способом, то есть замеряют на стенде и строят график зависимости по факту, на основании полученных во время испытаний показателей.
Мощность двигателя – величина непостоянная. Для каждого мотора есть кривая, которая отображает на графике зависимость мощности от частоты вращения коленчатого вала.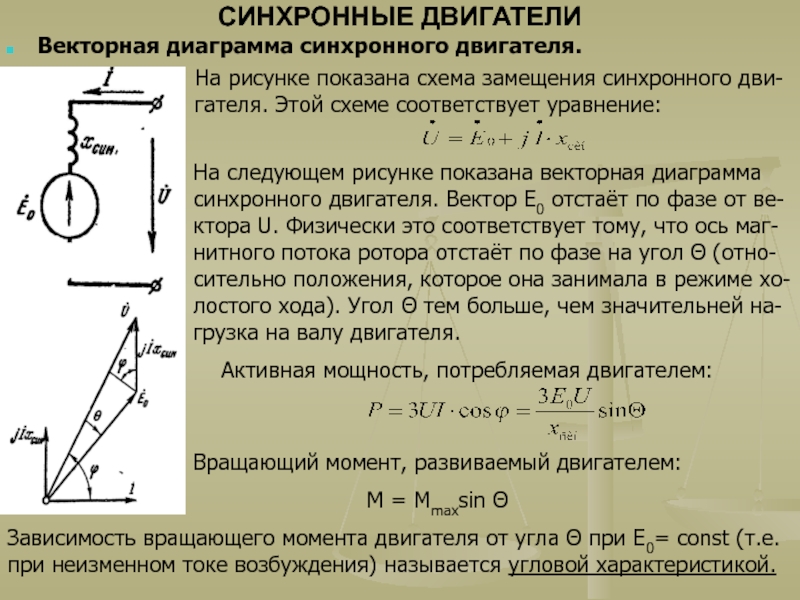 До определенного пика, примерно до 4-5 тысяч оборотов, мощность растет пропорционально оборотам. Далее идет плавное отставание роста мощности, кривая наклоняется. Примерно к 7-8 тысячам оборотов мощность идет на спад. Сказывается перекрытие клапанов на большой частоте вращения коленвала и падение КПД мотора из-за недостаточно интенсивного газообмена.
До определенного пика, примерно до 4-5 тысяч оборотов, мощность растет пропорционально оборотам. Далее идет плавное отставание роста мощности, кривая наклоняется. Примерно к 7-8 тысячам оборотов мощность идет на спад. Сказывается перекрытие клапанов на большой частоте вращения коленвала и падение КПД мотора из-за недостаточно интенсивного газообмена.
Чтобы узнать мощность двигателя, обратитесь к инструкции по эксплуатации авто. В разделе с техническими характеристиками мотора будет указана мощность и обороты, при которых она достигает пикового значения. Если мощность указана киловаттах, чтобы рассчитать лошадиные силы двигателя, воспользуйтесь приведенной выше формулой. В некоторых случаях автопроизводитель предоставляет график, на котором есть зависимость мощности двигателя и крутящего момента от частоты оборотов.
Видео: Простыми словами без сложных формул и расчетов, что такое мощность, крутящий момент и обороты двигателя.
Мощность ДВС определяет, насколько быстро автомобиль способен передвигаться или ускоряться (совершать работу).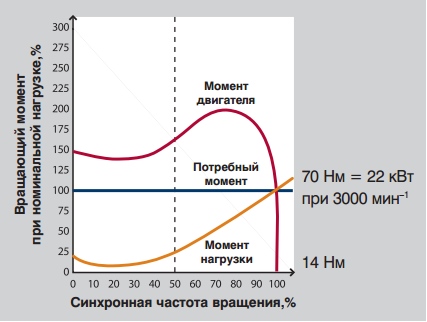 Полезная мощность двигателя рассчитывается с учетом потерь в трансмиссии, то есть указывает, сколько от изначальной мощности мотора по факту доходит до колес авто.
Полезная мощность двигателя рассчитывается с учетом потерь в трансмиссии, то есть указывает, сколько от изначальной мощности мотора по факту доходит до колес авто.
Что такое крутящий момент
Крутящий момент в двигателе автомобиля – это вращающая сила, которая численно равна произведению приложенной силы (давление раскаленных газов на поршень) на плечо (расстояние между осями коренных и шатунных шеек коленчатого вала в проекции, перпендикулярной оси вращения коленвала). Измеряется крутящий момент в ньютонах на метр (Нм).
Крутящий момент ДВС зависит от силы давления на поршень и расстояния между коренными и шатунными шейками. Зависимость здесь прямая. Чем больше плечо и чем больше давление на поршень – тем больше крутящий момент двигателя.
У дизельных двигателей степень сжатия больше. Больше и ход поршня в цилиндре (при равном с бензиновым мотором диаметре цилиндров). А это значит, что и расстояние между коренными и шатунными шейками будет больше. То есть длиннее плечо. За счет большей степени сжатия при рабочем такте у дизелей выше сила, давящая на поршень. Крутящий момент в дизельных моторах при прочих равных больше, чем в бензиновых.
За счет большей степени сжатия при рабочем такте у дизелей выше сила, давящая на поршень. Крутящий момент в дизельных моторах при прочих равных больше, чем в бензиновых.
Крутящий момент влияет на то, сколько энергии отдает мотор в текущий момент времени. Крутящий момент есть та величина, которая определяет фактически передаваемую в данный момент времени энергию на трансмиссию. Чем больше момент, тем сильнее тяга двигателя при текущих оборотах.
Что лучше: мощность или крутящий момент
Мощность и крутящий момент двигателя – величины взаимосвязанные. Это хорошо видно в формуле из первого пункта.
Пик крутящего момента на графике зависимости от частоты вращения мотора появляется раньше, чем пик мощности. Это справедливо как для дизельных, так и для бензиновых моторов. Однако у дизелей крутящий момент достигается раньше, и плато (интервал частоты вращения при пиковом значении) длиннее. У бензиновых ДВС мощность выше, хотя для ее достижения нужно раскрутить мотор почти до максимальных оборотов.
Сказать определенно, что лучше: мощность или крутящий момент, нельзя. Все зависит от случая. Трансмиссия современного авто способна трансформировать эти величины под требуемые условия. Поясним на примерах.
Для тяжелой техники, которой важна тяга в широком диапазоне оборотов, важнее крутящий момент. Мотор должен хорошо тянуть. Раскручивать его до предельных оборотов не нужно. Отчасти поэтому почти вся коммерческая техника оснащается дизельными моторами.
В гоночных автомобилях важнее мощность. Моторы этих авто по оборотам пилоты во время заездов держат в красной зоне. Двигатель отдает максимальную мощность. А трансмиссия преобразовывает мощность в тягу.
Для гражданских авто важен стиль вождения. Для езды на автомате подойдут оба мотора. Автоматическая трансмиссия будет держать мотор в диапазоне оборотов, при которых двигатель отдает максимум своего потенциала.
Для агрессивной езды на механике с раскручиванием двигателя в красную зону тахометра лучше подойдет бензиновый мотор. Но в этом случае нужно понимать, что для получения максимальной производительности от мотора потребуется держать его на пике оборотов и часто переключать передачи. Пик мощности у бензинового ДВС имеет малый диапазон и находится около максимальных оборотов. Для уверенных обгонов и ускорений нужно будет понижать передачу и раскручивать двигатель.
Но в этом случае нужно понимать, что для получения максимальной производительности от мотора потребуется держать его на пике оборотов и часто переключать передачи. Пик мощности у бензинового ДВС имеет малый диапазон и находится около максимальных оборотов. Для уверенных обгонов и ускорений нужно будет понижать передачу и раскручивать двигатель.
Для размеренной езды, особенно в городе, больше подходит дизель. Для обгона на дизельном авто зачастую не потребуется переходить на пониженную передачу, а высокий крутящий момент в широком диапазоне оборотов позволит реже переключаться.
8 Расчет крутящих моментов на валах
8.1 Расчет крутящего момента на валу электродвигателя
Для определения крутящего момента на валу электродвигателя привода главного движения используется номинальная мощность и номинальная частота вращения:
где – мощность электродвигателя, кВт:
–номинальная частота вращения электродвигателя, мин-1:
.
.
8.2 Расчет крутящего момента на валах привода
Крутящий момент на валах привода рассчитывается по формуле:
где – мощность электродвигателя, кВт:
–КПД участка привода от электродвигателя до соответствующего вала;
–расчетная частота вращения соответствующего вала, принимается по графику частот, мин-1.
8.3 Расчет крутящего момента на первом валу привода
Крутящий момент на первом валу привода рассчитывается по формуле:
где – мощность электродвигателя, кВт:
–КПД участка привода от электродвигателя до 1-го вала;
–расчетная частота вращения на 1-ом валу, принимаем по графику частот, мин-1: = 2850 мин-1.
КПД участка привода до первого вала рассчитывается по формуле:
где – КПД зубчатой муфты;
–КПД пары подшипников;
8.4 Расчет крутящего момента на втором валу привода
Крутящий момент на втором валу привода рассчитывается по формуле:
где – мощность электродвигателя, кВт:
–КПД участка привода от электродвигателя до 2-го вала;
–расчетная частота вращения на 1-ом валу, принимаем по графику частот, мин-1: = 630 мин-1.
КПД участка привода до второго вала рассчитывается по формуле:
где – КПД зубчатой муфты;
–КПД пары подшипников;
— КПД зацепления зубчатых колес; .
8.5 Расчет крутящего момента на третьем валу привода
Крутящий момент на третьем валу привода рассчитывается по формуле:
где – мощность электродвигателя, кВт:
–КПД участка привода от электродвигателя до 3-го вала;
–расчетная частота вращения на 1-ом валу, принимаем по графику частот, мин-1: = 160 мин-1.
КПД участка привода до третьего вала рассчитывается по формуле:
где – КПД зубчатой муфты;
–КПД пары подшипников;
— КПД зацепления зубчатых колес; .
8.6 Расчет крутящего момента на четвертом валу привода
Крутящий момент на четвертом валу привода рассчитывается по формуле:
где – мощность электродвигателя, кВт:
–КПД участка привода от электродвигателя до 4-го вала;
–расчетная частота вращения на 4-ом валу, определяется по формуле:
где – минимальная частота вращения четвертого вала, мин-1:
мин-1;
–максимальная частота вращения четвертого вала, мин-1:
мин-1.
КПД участка привода до четвертого вала рассчитывается по формуле:
где – КПД зубчатой муфты;
–КПД пары подшипников;
–КПД зацепления зубчатых колес; .
8.7 Расчет крутящего момента на шпинделе
Крутящий момент на шпинделе рассчитывается по формуле:
где – мощность электродвигателя, кВт:
–КПД участка привода от электродвигателя до шпинделя;
–расчетная частота вращения шпинделя, определяется по формуле:
где – минимальная частота вращения четвертого вала, мин-1:
мин-1;
–диапазон регулирования частот вращения шпинделя:
КПД участка привода до шпинделя рассчитывается по формуле:
где – КПД зубчатой муфты;
–КПД пары подшипников;
–КПД зацепления зубчатых колес; .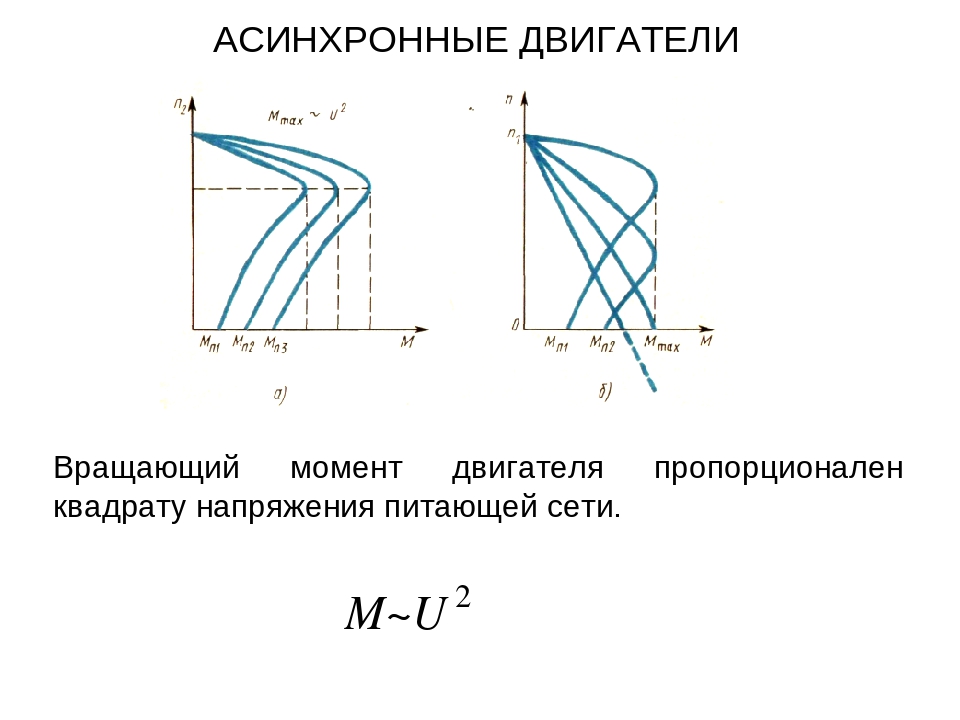
9 Проектный расчет передач
9.1 Расчет цилиндрической прямозубой постоянной передачиz1–z2
9.1.1 Исходные данные
1. Расчетный крутящий момент на первом валу привода, H·м:
Т1 = 13 Н·м;
2. Число зубьев шестерни: z1 = 18;
3. Число зубьев колеса: z2 = 83;
4. Передаточное число передачи: u1 = 4,76.
9.1.2 Выбор материала и термической обработки зубчатых колес
В качестве материала для зубчатых колес передачи выбираем сталь 40Х, которая отвечает необходимым техническим и эксплуатационным требованиям. В качестве термической обработки выбираем объемную закалку, позволяющую получить твердость зубьев 40..50HRCэ.
9.1.3 Проектный расчет постоянной прямозубой зубчатой передачи на контактную выносливость
Диаметр начальной окружности шестерни рассчитывается по формуле:
где вспомогательный коэффициент: для прямозубых передач
— расчётный крутящий момент на первом валу, Н·м: Т1=13 Н·м;
коэффициент нагрузки для шестерни, равный 1,3.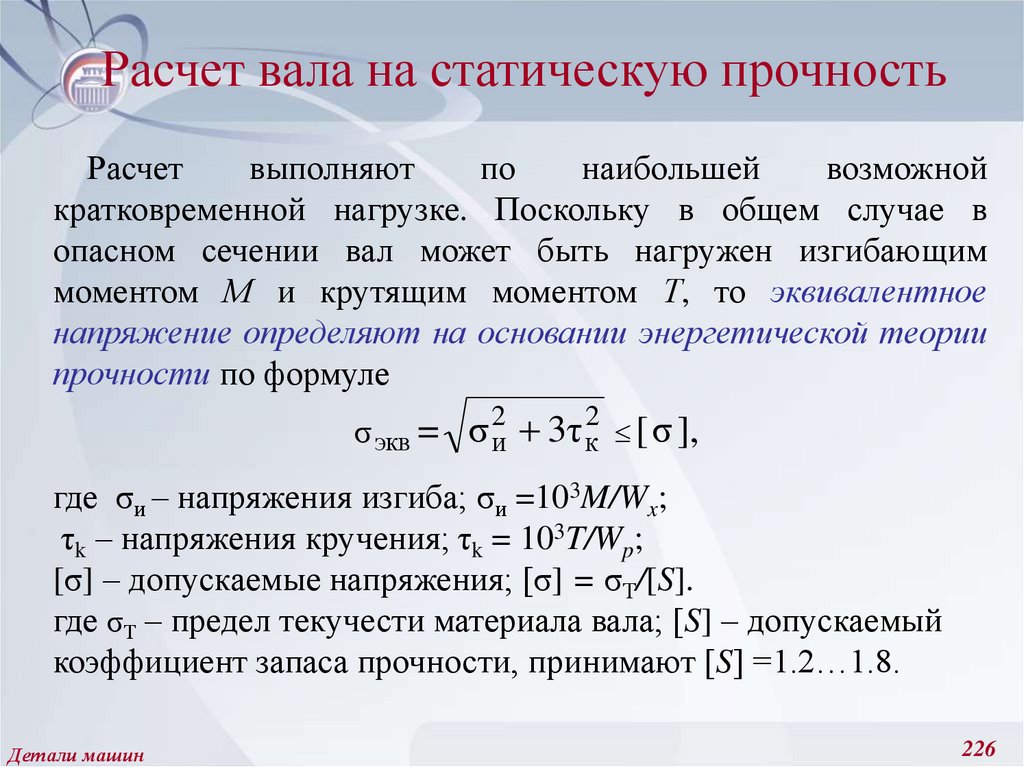 .1,5: принимаем
.1,5: принимаем
— передаточное число:
отношение рабочей ширины венца передачи к начальному диаметру шестерни:
допускаемое контактное напряжение, МПа.
Допускаемое контактное напряжение для прямозубых передач рассчитывается по формуле:
где базовый предел контактной выносливости поверхностей зубьев, соответствующий базовому числу циклов перемены напряжений, МПа;
МПа;
SH – коэффициент безопасности: SH = 1,1.
Коэффициент отношения рабочей ширины венца передачи к начальному диаметру шестерни может приниматься в пределах
или определяется по формуле:
отношение рабочей ширины венца передачи к модулю: принимаем
число зубьев шестерни: z1 = 18.
что находится в допустимых пределах .
Таким образом, диаметр начальной окружности шестерни равен:
Модуль постоянной прямозубой передачи определяется из условия расчета на контактную выносливость зубьев по рассчитанному значению диаметра начальной окружности шестерни по формуле:
где диаметр начальной окружности шестерни, мм:dw1 = 38,75 мм;
число зубьев шестерни: z1 = 18.
Крутящий момент автомобиля: формула расчета, от чего зависит
Парадокс, но лишь немногие автолюбители ясно представляют принципиальную разницу между «лошадиными силами» и «ньютон-метрами», в которых измеряется крутящий момент. В обиходе определение крутящего момента двигателя напрямую связывают с динамикой разгона, а лошадиные силы с максимальной скорость. Если говорить уж совсем грубо, то формулировка вполне удовлетворительна, хоть и не объясняет всей сути физических процессов. Восполнить теоретические пробелы, а также получить наглядное представление о том, что такое крутящий момент двигателя, — вам поможет предоставленный ниже материал.
Момент вращения
Если выражаться языком физики, то понятие о вращающем моменте легко уяснить, зная принцип получения преимущества от использования рычага. Вычисляемые путем сложения приложенных на рычаг усилий (вес груза) к длине плеча (рычага) «ньютон-метры», показывают потенциальное количество выполняемой работы. В случае с ДВС вес груза – это усилие с которым поршень после сгорания топливно-воздушной смеси совершает возвратно-поступательное движение.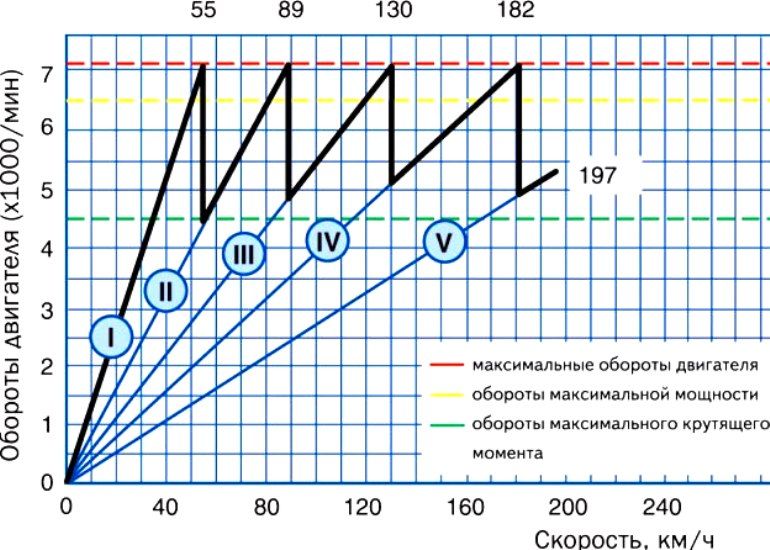 Длина плеча будет не чем иным, как ходом поршня (расстояние от ВМТ до НМТ). Вращающее усилие создается только во время рабочего такта.
Длина плеча будет не чем иным, как ходом поршня (расстояние от ВМТ до НМТ). Вращающее усилие создается только во время рабочего такта.
От чего зависит полка крутящего момента
Согласно расчетной формуле Мкр = F х L, где F – это сила, а L – длина плеча, момент вращения будет зависеть от КПД сгорания топливно-воздушной смеси (F) и величины хода поршней (L).
Поскольку автомобиль – это комплексный механизм, на крутящий момент двигателя влияет ряд характеристик других узлов и агрегатов. Ведущие колеса автомобиля будут получать максимальное тяговое усилие лишь в тот момент, когда взаимодействие механизмов является оптимальным. Пик крутящего момента достигается на таких оборотах двигателя, когда наполнение камеры сгорания рабочей смесью, сжигание продуктов горение и вывод отработавших газов осуществляется с минимальными механическими потерями. Для каждого двигателя этот параметр колеблется в зависимости от конструктивных особенностей и типа используемого топлива.
Мощность
Количество полезной работы, преобразованное возвратно-поступательными движениями КШМ, обозначается ньютон-метрами (крутящий момент). Тогда что такое мощность двигателя? Мощностью именуется количество произведенной работы за единицу времени. Иными словами, количество единиц крутящего момента, которое мотор способен выдать за определенный промежуток времени. Мощность двигателя измеряется в киловаттах (кВт).
Формула для расчета мощности в киловаттах:
P=Mkp*n/9549, где n – количество оборотов коленвала в минуту; Mkp – вращающий момент на коленчатом валу.
Нехитрое логическое умозаключение приводит нас к тому, что мощность мотора зависит от количества оборотов.
Соотношение крутящего момента к мощности
Для получения наглядного представления о взаимодействии двух величин рассмотрим основные характеристики мотора на графике. Он демонстрирует выдаваемую двигателем мощность и крутящий момент двигателя в зависимости от оборотов коленчатого вала.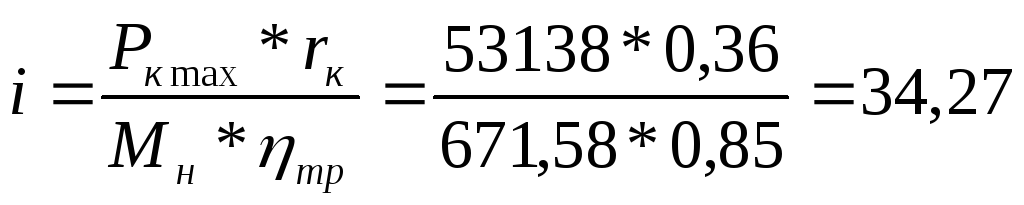
График отчетливо демонстрирует тот факт, что тяговое усилие на колесах не прямо пропорционален количеству оборотов либо мощности. Двигатель достигает пика крутящего момента уже на 3 тыс. об/мин. Максимум мощности доступно на 5500 об/мин. В обоих случаях обороты продолжают расти, но отдача падает. Для обозначенного двигателя обороты от 2500 до 5 тыс. наиболее оптимальные.
В этом режиме работы близкая к максимальному значению «полка» момента позволит полноценно реализовать потенциал мотора на протяжении всего отрезка.
Приведенный график является примером гражданской настройки современных бензиновых моторов. Преимущества очевидны:
- стабильный прирост мощности;
- достаточно широкая «полка» с плавным приростом и затуханием.
Настройка подобного типа позволяет добиться «эластичности» двигателя. Такая работа обеспечивается не только программно (настройка ЭБУ), но и применением различных вспомогательных технологий (изменяемые фазы газораспределения).
Разница мощностных характеристик во многом зависит от конструкции системы впуска и выпуска. К примеру, двигатели оснащенные турбонаддувом в точке выхода на «буст» получают значительную прибавку в динамике. Крутящий момент и количество лошадиных сил таких моделей значительно превышают своих атмосферных собратьев.
Что такое лошадиные силы
Наблюдательный читатель, скорей всего, отметит подозрительным тот факт, что до сих пор не прозвучало, всеми так любимое «лошадиные силы». Суть в том, что «скакуны» — это лишь дань моде тех времен, когда механизмам приходилось доказывать свое преимущество над живой рабочей силой. Поэтому превосходство (способность выполнить определенное количество работы) удобно было выражать в пересчете на потенциал одной лошади. Фактически 1 л.с – это усилие, которого достаточно для поднятия груза массою 75 кг на 1 м за 1 с.
Для того чтобы получить «лошадиные силы» достаточно умножить значение мощности в киловаттах на коэффициент 1,36.
Покупатели не потеряют ровным счетом ничего, если производители откажутся использовать «л. с» в качестве показателя мощностных характеристики автомобилей. Обозначить крутящий момент и мощность в кВт вполне достаточно. Но традиция настолько глубоко запечатлелась в сознании, что тратить усилия на ее разрушения попросту нецелесообразно.
с» в качестве показателя мощностных характеристики автомобилей. Обозначить крутящий момент и мощность в кВт вполне достаточно. Но традиция настолько глубоко запечатлелась в сознании, что тратить усилия на ее разрушения попросту нецелесообразно.
Итоги
- Мощность мотора зависит от крутящего момента;
- «л.с» рассчитаны на достижение максимальной скорости. Автомобиль с большим количеством «скакунов» под капотом сможет развить внушительную скорость, но это займет очень много времени;
- от тягового усилия зависит насколько быстро двигатель сможет развить свою максимальную мощность;
- большое количество «ньютон-метров» позволяет более выгодно использовать потенциал двигателя. Такие моторы легче переносят нагрузки;
- чем шире «полка» момента, тем эластичней двигатель и приятней в управлении автомобиль;
- ввиду особенностей дизельных ДВС (большая степень сжатия, медленное горение смеси), а также применения современных систем дополнительного нагнетания воздуха, дизельные двигатели имеют больший крутящий момент с самих низких оборотов.
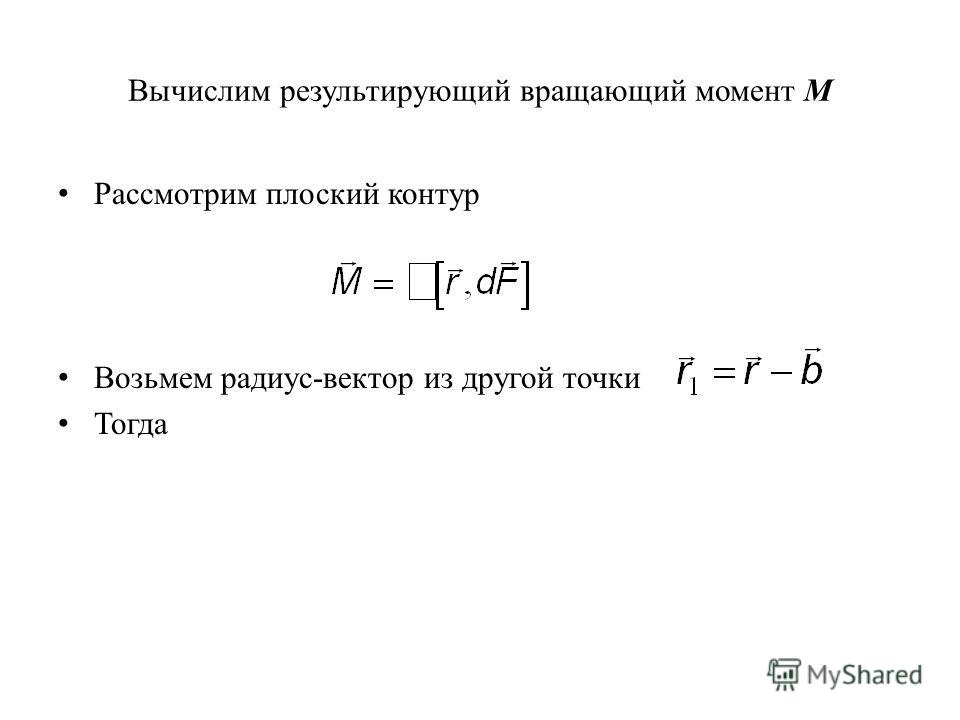
Выражаясь простым языком, «ньютон-метры» – это сила вашего автомобиля, а киловатты – выносливость.
Крутящий момент: что такое, формула и в чем измеряется
Мощность двигателя – важнейший его показатель. Как в плане эксплуатации, так и в плане начисления налогов на авто. Крутящий момент нередко путают с мощностью или упускают его из виду в процессе оценки ходовых качеств авто. Многие упрощают автомобиль, считая, что большое количество лошадиных сил – главное преимущество любого мотора. Однако, вращающий момент – более важный показатель. Особенно, если автомобиль не предполагается использовать в качестве спортивного.
Что такое крутящий момент
Крутящим моментом называют единицу силы, которая необходима для поворота коленчатого вала ДВС. Эта не «лошадиная сила», которой должна обозначаться мощность.
ДВС вырабатывает кинетическую энергию, вращая таким образом коленвал. Показатель мощности двигателя (сила давления) зависит от скорости сгорания топлива. Крутящий момент – результат от действия силы на рычаг. Эта сила в физике считается в ньютонах. Длина плеча коленвала считается в метрах. Поэтому обозначение крутящего момента – ньютон-метр.
Крутящий момент – результат от действия силы на рычаг. Эта сила в физике считается в ньютонах. Длина плеча коленвала считается в метрах. Поэтому обозначение крутящего момента – ньютон-метр.
Технически, крутящий момент – это усилие, которое должно осуществляться двигателем для разгона и движения машины. При этом сила, оказывающая действие на поршень, пропорциональна объему двигателя.
Маховик – одна из важнейших деталей, которая должна через редуктор передавать вращательный момент от мотора к коробке передач, от стартера на коленвал, от коленвала на нажимной диск. Собственно, крутящий момент – итог давления на шатун.
Формула расчета крутящего момента
Показатель КМ рассчитывается так: мощность (в л. с.) равно крутящий момент (в Нм) умножить на обороты в минуту и разделить на 5,252. При меньших чем 5,252 значениях крутящий момент будет выше мощности, при больших – ниже.
В пересчете на принятую в России систему (кгм – килограмм на метр) – 1кг = 10Н, 1 см = 0,01м.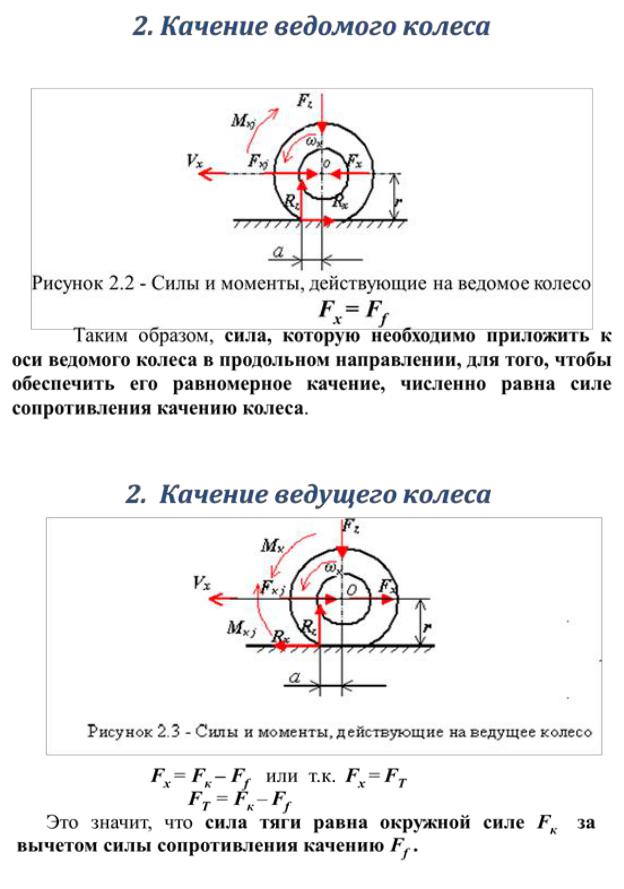 Таким образом 1 кг х см = 0,1 Н х м. Посчитать вращательный момент в разных системах измерений ньютоны/килограммы и т.д. поможет конвертер – в практически неизменном виде он доступен на множестве сайтов, с его помощью можно определять данные по практически любому мотору.
Таким образом 1 кг х см = 0,1 Н х м. Посчитать вращательный момент в разных системах измерений ньютоны/килограммы и т.д. поможет конвертер – в практически неизменном виде он доступен на множестве сайтов, с его помощью можно определять данные по практически любому мотору.
График:
На графике изображена зависимость крутящего момента двигателя от его оборотов
От чего зависит крутящий момент
На КМ будут влиять:
- Объем двигателя.
- Давление в цилиндрах.
- Площадь поршней.
- Радиус кривошипа коленвала.
Основная механика образования КМ заключается в том, что чем больше двигатель по объему, тем сильней он будет нагружать поршень. То есть – будет выше значение КМ. Аналогична взаимосвязь с радиусом кривошипа коленвала, но это вторично: в современных двигателях этот радиус сильно изменить нельзя.
Давление в камере сгорания – не менее важный фактор. От него напрямую зависит сила, давящая на поршень.
Для снижения потерь крутящего момента при тряске машины во время резкого газа можно использовать компенсатор.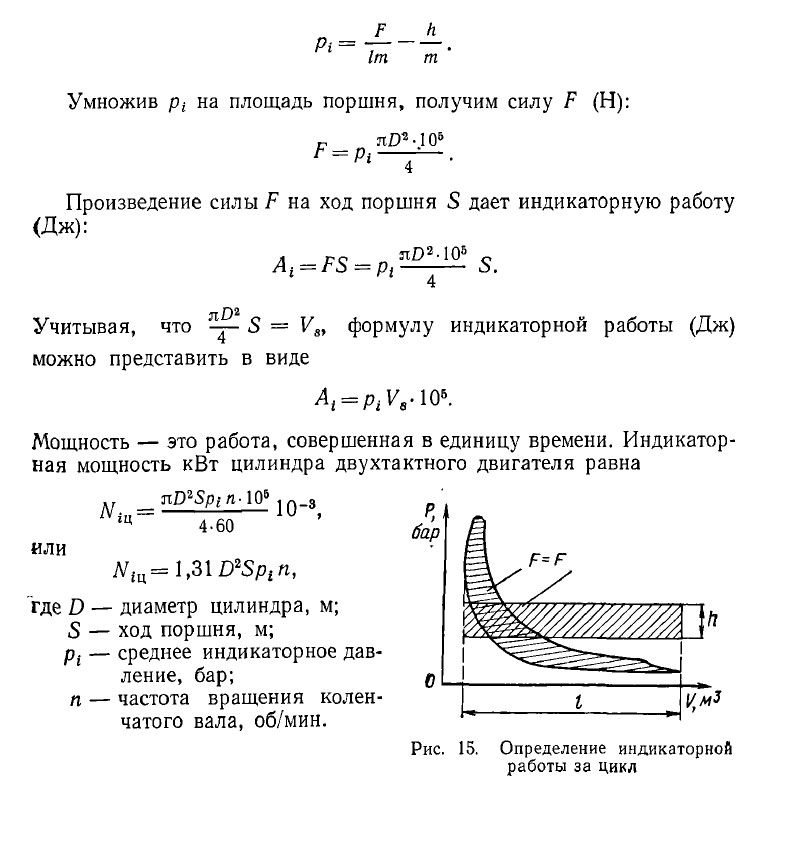 Это специальный (собранный вручную) демпфер, компенсация которого позволит сохранить вращающий момент и повысить срок эксплуатации деталей.
Это специальный (собранный вручную) демпфер, компенсация которого позволит сохранить вращающий момент и повысить срок эксплуатации деталей.
На что влияет крутящий момент
Главная цель КМ – набор мощности. Часто мощные моторы обладают низким показателем КМ, поэтому не способны разогнать машину достаточно быстро. Особенно это касается бензиновых двигателей.
ВАЖНО! При выборе авто стоит рассчитать оптимальное соотношение вращательного момента с количеством оборотов, на которых чаще всего мотор будет работать. Если держать вращательный момент на соответствующем уровне, это позволит оптимально реализовать потенциал двигателя.
Высокий КМ также может влиять на управляемость машины, поэтому при резком увеличении скорости не лишним будет использование системы TSC. Она позволяет точнее направлять авто при резком разгоне.
Широко распространенный 8-клапанный двигатель ВАЗ выдает вращательный момент 120 (при 2500-2700 оборотах). Ручная коробка или АКПП стоит на машине – не принципиально. При использовании КПП немаловажен опыт водителя, на автоматической коробке плавный старт обеспечивает преобразователь.
При использовании КПП немаловажен опыт водителя, на автоматической коробке плавный старт обеспечивает преобразователь.
Как увеличить крутящий момент
Увеличение рабочего объема. Чтобы повышать КМ используются разные методы: замена установленного коленвала на вал с увеличенным эксцентриситетом (редко встречающаяся запчасть, которую трудно находить) или расточка цилиндров под больший диаметр поршней. Оба способа имеют свои плюсы и минусы. Первый требует много времени на подбор деталей и снижает долговечность двигателя. Второй, увеличение диаметра цилиндров с помощью расточки, более популярен. Это может сделать практически любой автосервис. Там же можно настроить карбюратор для повышения КМ.
Изменение величины наддува. Турбированные двигатели позволяют достичь более высокого показателя КМ благодаря особенностям конструкции – возможности отключить ограничения в блоке управления компрессором, который отвечает за наддув. Манипуляции с блоком позволят повысить объем давления выше максимума, указанного производителем при сборке автомобиля.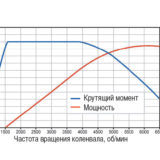 Способ можно назвать опасным, поскольку у каждого двигателя есть лимитированный запас нагрузок. Кроме того, часто требуются дополнительные усовершенствования: увеличение камеры сгорания, приведение охлаждения в соответствие повышенной мощности. Иногда требуется отрегулировать впускной клапан, иногда – сменить распредвал. Может потребоваться замена чугунного коленвала на стальной, замена поршней.
Способ можно назвать опасным, поскольку у каждого двигателя есть лимитированный запас нагрузок. Кроме того, часто требуются дополнительные усовершенствования: увеличение камеры сгорания, приведение охлаждения в соответствие повышенной мощности. Иногда требуется отрегулировать впускной клапан, иногда – сменить распредвал. Может потребоваться замена чугунного коленвала на стальной, замена поршней.
Изменение газодинамики. Редко используемый вариант, поскольку двигатель – сложная конструкция, созданием которого занимаются профессионалы. Теоретически можно придумать, как убрать ограничения, заложенные конструкторами для увеличения срока эксплуатации двигателя и его деталей. Но на практике, если убрать ограничитель, результат не гарантирован, поскольку поменяются все характеристики: например, динамика вырастет, но шина не будет цепляться за дорогу. Чтобы усовершенствовать двигатель такие образом надо быть не просто автомобильным конструктором, но и математиком, физиком и т. д.
д.
ВАЖНО! Простой способ повысить КМ – использовать масляный фильтр. Он снизит засорение двигателя и продлит срок эксплуатации всех деталей.
Определение крутящего момента на валу
Для измерения крутящего момента на валу автомобильного двигателя применяется множество методик. Это может быть показатель подачи топлива, температуры выхлопных газов и т.д. Такие методы не гарантируют высокой точности.
Распространенный метод повышенной точности – применение тензометрического моста. На вал крепятся тензометры, электрически соединенные по мостовой схеме. Сигнал передается на считывающее устройство.
Измеритель крутящего момента
Главная сложность в измерителе крутящего момента, использующего тензометры, является точность передачи данных. Применявшиеся ранее контактные, индукционные и светотехнические устройства не гарантировали необходимой эффективности. Сейчас данные передаются по цифровым радиоканалам. Измеритель представляет собой компактный радиопередатчик, который крепится на вал и передает данные на приемник.
Сейчас такие устройства доступны по стоимости и просты в эксплуатации. Применяются в основном в СТО.
Датчик крутящего момента
Аналогичные устройства, измеряющие КМ, в автомобиле могут быть установлены не только на коленвал, но и на рулевое колесо. Он ставится на модели машин с электроусилителем руля и позволяет отслеживать работу системы управление автомобилей. При выходе датчика из строя, усилитель, как правило, отключается.
Максимальный крутящий момент
Максимальным называется крутящий момент, представляющий пик, после которого момент не растет, несмотря на количество оборотов. На малых оборотах в цилиндре скапливается большой объем остаточных газов, в результате чего показатель КМ значительно ниже пикового. На средних оборотах в цилиндры поступает больше воздуха, процент газов снижается, крутящий момент продолжает расти.
При высоких оборотах растут потери эффективности: от трения поршней, инерционных потерь в ГРМ, разогрева масла и т.д. будет зависеть работа мотора. Поэтому рост качества работы двигателя прекращается или само качество начинает снижаться. Максимальный крутящий момент достигнут и начинает снижаться.
Поэтому рост качества работы двигателя прекращается или само качество начинает снижаться. Максимальный крутящий момент достигнут и начинает снижаться.
В электродвигателях максимальный вращательный момент называется «критический».
Таблица марок автомобилей с указанием крутящего момента:
| Модели автомобиля ВАЗ | Крутящий момент (Нм, разные марки двигателей) | |
| 2107 | 93 – 176 | |
| 2108 | 79-186 | |
| 2109 | 78-118 | |
| 2110 | 104-196 | |
| 2112 | 104-162 | |
| 2114 | 115-145 | |
| 2121 (Нива) | 116-129 | |
| 2115 | 103-132 | |
| 2106 | 92-116 | |
| 2101 | 85-92 | |
| 2105 | 85-186 | |
| Двигатели ЗМЗ | ||
| 406 | 181,5-230 | |
| 409 | 230 | |
| Других популярные в России марки автомобилей | ||
| Ауди А6 | 500-750 | |
| БМВ 5 | 290-760 | |
| Бугатти Вейрон | 1250-1500 | |
| Дэу Нексия | 123-150 | |
| КАМАЗ | ~650-2000+ | |
| Киа Рио | 132-151 | |
| Лада Калина | 127-148 | |
| Мазда 6 | 165-420 | |
| Мицубиси Лансер | 143-343 | |
| УАЗ Патриот | 217-235 | |
| Рено Логан | 112-152 | |
| Рено Дастер | 156-240 | |
| Тойота Королла | 128-173 | |
| Хендай Акцент | 106-235 | |
| Хендай Солярис | 132-151 | |
| Шевроле Каптив | 220-400 | |
| Шевроле Круз | 118-200 |
Какому двигателю отдать предпочтение
Сегодня множество моделей производители оснащают разными типами моторов: бензиновым или дизельным. Эти модели идентичны только по цене и другим характеристикам.
Эти модели идентичны только по цене и другим характеристикам.
Из-за разных типов мотора одна и та же модель может отличаться по показателям мощности мотора и крутящему моменту, при этом разница может быть значительной.
Бензиновый двигатель
Бензиновый двигатель формирует воздушно-топливную смесь, заполняющую цилиндр. Температура внутри него поднимается до примерно 500 градусов. У таких моторов номинальный коэффициент сжатия составляет порядка 9-10, реже 11 единиц. Поэтому, когда происходит впрыск необходимо использование свечей зажигания.
Дизельный двигатель
В цилиндрах работающего на дизеле движка коэффициент сжатия смеси может достигать показателя в 25 единиц, температура – 900 градусов. Поэтому смесь зажигается без использования свечи.
Электродвигатель
Автомобильный трехфазный асинхронный электродвигатель работает по совершенно другим законам, поэтому его мощность и КМ отличаются от традиционных кардинально. Электромотор состоит из ротора и статора, кратность которых позволяет выдавать пиковый КМ (600 Нм) на любой скорости. При этом мощность электродвигателя, например, у Теслы, составляет 416 л. с.
Электромотор состоит из ротора и статора, кратность которых позволяет выдавать пиковый КМ (600 Нм) на любой скорости. При этом мощность электродвигателя, например, у Теслы, составляет 416 л. с.
Чтобы ответить на вопрос – дизельный, бензиновый или электродвигатель лучше, надо сначала исключить третий вариант, поскольку электродвигатели пока не так распространены, как первые два типа.
ВАЖНО! Что касается выбора между бензиновым и дизельным двигателями, они в первую очередь отличаются мощностью и крутящим моментом. На практике это означает, что при одинаковом объеме двигателя дизельный быстрее разгоняется, а бензиновый позволяет давать более высокую скорость.
Кроме того, благодаря большему крутящему момент автомобиль, использующийся как грузовой, обладает большей грузоподъемностью за счет двигателя. Особенно если двигатель дизель-генераторный.
Улучшение разгона авто за счет изменения момента вращения
Чем выше показатель крутящего момента – тем быстрее двигатель набирает мощность. Таким образом, вырастет скорость движения. На практике это означает, что, например, во время разгона крутящий момент позволит быстрее обогнать едущий впереди автомобиль.
Таким образом, вырастет скорость движения. На практике это означает, что, например, во время разгона крутящий момент позволит быстрее обогнать едущий впереди автомобиль.
Чтобы улучшить разгон автомобиля за счет изменения момента вращения, достаточно повысить показатели последнего. Как это сделать – описано выше.
Зависимость мощности от крутящего момента
Крутящий момент, как говорилось выше, это показатель того, с какой скоростью двигатель может набирать обороты. По сути, мощность мотора – прямая производная от КМ на коленвале. Чем больше оборотов – тем выше показатель мощности.
Зависимость мощности от вращательного момента выражается формулой: Р = М*n (Р – мощность, М – крутящий момент, n – количество оборотов коленвала/мин).
Мощность и крутящий момент. — DRIVE2
Что интересует людей, изучающих технические характеристики того или иного автомобиля? В первую очередь мощность, затем расход топлива и максимальная скорость. О крутящем моменте вспоминают редко. А зря.
А зря.
Тяговые возможности моторов еще с момента рождения самоходных колясок принято оценивать по мощности, которая выражается в лошадиных силах. Из-за отсутствия в те далекие времена методики расчета и определения мощности до 1906/1907 годов эта характеристика двигателя имела не вполне четкое обозначение – она показывала приблизительную мощность – «от» и «до», например, от 15 до 20 л.с.
С 1907 года этот неточный показатель мощности разделили на два значения, например, 6/22 л.с. В первую цифру заложили значение налоговой ставки, а во вторую – мощность. Введенная налоговая лошадиная сила соответствовала определенному значению рабочего объема двигателя: 261,8 куб. см для четырехтактных моторов и 174,5 куб. см – для двухтактных. Появление такого способа установления налоговых ставок было обусловлено зависимостью рабочего объема двигателя от количества вырабатываемой им энергии и потребления топлива. Обозначать мощность в киловаттах (кВт), согласно международной системе измерений СИ, начали значительно позже.
На самом деле «мощность» отражает тяговые возможности двигателя лишь косвенно. С этим согласятся те, кто ездил на автомобилях-одноклассниках с двигателями приблизительно равной мощности и объема. Они наверняка заметили, что одни автомобили достаточно резвы начиная с низких оборотов, другие любят только высокие обороты, а на малых ведут себя достаточно вяло.
Много вопросов возникает у тех, кто после легковушки с 110-120-сильным бензиновым мотором пересел за руль такой же машины, но с дизельным двигателем мощностью всего 70-80 л.с. По динамике разгона, не используя спортивный режим (высокие обороты), на первый взгляд маломощный «дизель» с легкостью обойдет своего бензинового брата. В чем же здесь дело?
Вся эта неразбериха вызвана тем, что в каждом случае такая величина как сила тяги (FT, Н), приложенная к ведущим колесам, будет разной. Объяснение этому легко найти из формулы: FT=Мкр•i•h/r, где Мкр-крутящий момент vk.com/autobap двигателя, i-передаточное число трансмиссии, h – КПД трансмиссии (при продольном расположении двигателя h=0,88-0,92, при поперечном – h=0,91-0,95), r – радиус качения колеса. Из формулы видно, что vk.com/autobap чем больше крутящий момент двигателя и передаточное число, и чем меньше потери в трансмиссии (т.е. чем выше ее КПД) и радиус ведущих колес, тем больше сила тяги. Радиус колес, передаточное число и КПД трансмиссии у автомобилей-одноклассников очень схожи, поэтому на силу тяги они влияют не в такой степени как крутящий момент двигателя.
Из формулы видно, что vk.com/autobap чем больше крутящий момент двигателя и передаточное число, и чем меньше потери в трансмиссии (т.е. чем выше ее КПД) и радиус ведущих колес, тем больше сила тяги. Радиус колес, передаточное число и КПД трансмиссии у автомобилей-одноклассников очень схожи, поэтому на силу тяги они влияют не в такой степени как крутящий момент двигателя.
Если в формулу подставить реальные цифры, то сила тяги на каждом ведущем колесе, например, автомобиля Volkswagen Golf IV с 75-сильным мотором, развивающим крутящий момент 128 Н•м, будет равна 441 Н или 45 кГ•с. Правда, эти значения действительны, когда частота вращения коленчатого вала двигателя (3300 об/мин) соответствует максимальному крутящему моменту.
Что такое крутящий момент
Разобраться, что такое крутящий момент, можно на простом примере. Возьмем палку и один ее конец зажмем в тисках. Если надавить на другой конец палки, на нее начнет воздействовать крутящий момент (Мкр). Он равен силе, приложенной к рычагу, умноженной на длину плеча силы. В цифрах это выглядит так: если на рычаг длиной один метр подвесить 10-килограммовый груз, появится крутящий момент величиной 10 кг•м. В общепринятой системе измерения СИ этот показатель (умножается на значение ускорения свободного падения – 9,81 м/с2) будет равен 98,1 Н•м. Из этого следует, что получить больший крутящий момент можно двумя путями – увеличив длину рычага или вес груза.
В цифрах это выглядит так: если на рычаг длиной один метр подвесить 10-килограммовый груз, появится крутящий момент величиной 10 кг•м. В общепринятой системе измерения СИ этот показатель (умножается на значение ускорения свободного падения – 9,81 м/с2) будет равен 98,1 Н•м. Из этого следует, что получить больший крутящий момент можно двумя путями – увеличив длину рычага или вес груза.
В двигателе внутреннего сгорания нет палок и грузов, а вместо них имеется кривошипно-шатунный механизм с поршнями. Крутящий момент здесь получают благодаря сгоранию горючей смеси, которая при этом расширяется и толкает поршень вниз. Поршень в свою очередь через шатун давит на «колено» коленчатого вала. Хотя в описании характеристик двигателей длину плеча не указывают, об этом позволяет судить величина хода поршня (удвоенное значение радиуса кривошипа).
Примерный расчет крутящего момента двигателя выглядит так. Когда поршень толкает шатун с усилием 200 кг на плечо 5 см возникает крутящий момент 10 кГ•с, или 98,1 Н•м. Чтобы этот показатель стал больше, радиус кривошипа следует увеличить или сделать так, чтобы поршень давил на шатунную шейку с большей силой. Увеличивать радиус кривошипа до бесконечности нельзя, так как размер двигателя тоже придется увеличивать в ширину и в высоту. Возрастают и силы инерции, требующие упрочения конструкции или уменьшения максимальных оборотов. vk.com/autobap Появляются при этом и другие негативные факторы.vk.com/autobap В такой ситуации у конструкторов двигателей остался только один выход – увеличить силу, с которой поршень приводит в движение коленчатый вал. Для этого топливно-воздушную смесь в камере сгорания необходимо сжечь более качественно и большее количество. Достигают этого путем увеличения рабочего объема, диаметра цилиндров и их количества, а также улучшения степени наполнения цилиндров топливно-воздушной смесью, оптимизации процесса сгорания, повышения степени сжатия. Подтверждает это и расчетная формула крутящего момента: Мкр=VH •pe / 0,12566 (для четырехтактного двигателя), где VH – рабочий объем двигателя (л), pe – среднее эффективное давление в камере сгорания (бар).
Чтобы этот показатель стал больше, радиус кривошипа следует увеличить или сделать так, чтобы поршень давил на шатунную шейку с большей силой. Увеличивать радиус кривошипа до бесконечности нельзя, так как размер двигателя тоже придется увеличивать в ширину и в высоту. Возрастают и силы инерции, требующие упрочения конструкции или уменьшения максимальных оборотов. vk.com/autobap Появляются при этом и другие негативные факторы.vk.com/autobap В такой ситуации у конструкторов двигателей остался только один выход – увеличить силу, с которой поршень приводит в движение коленчатый вал. Для этого топливно-воздушную смесь в камере сгорания необходимо сжечь более качественно и большее количество. Достигают этого путем увеличения рабочего объема, диаметра цилиндров и их количества, а также улучшения степени наполнения цилиндров топливно-воздушной смесью, оптимизации процесса сгорания, повышения степени сжатия. Подтверждает это и расчетная формула крутящего момента: Мкр=VH •pe / 0,12566 (для четырехтактного двигателя), где VH – рабочий объем двигателя (л), pe – среднее эффективное давление в камере сгорания (бар).
Получить на коленчатом валу двигателя максимальный крутящий момент удается не на всех оборотах. У разных двигателей пик максимального крутящего момента достигается на различных режимах – у одних он больше на малых оборотах (в диапазоне 1800-3000 об/мин), у других – на более высоких (в диапазоне 3000-4500 об/мин). Объясняется это тем, что в зависимости от конструкции впускного тракта и фаз газораспределения эффективное наполнение цилиндров топливно-воздушной смесью происходит только при определенных оборотах.
Кто сильнейший?
Большим крутящим моментом обладают многоцилиндровые двигатели, моторы с турбо- и механическим наддувом. А чемпионами по величине крутящего момента являются «дизели». Многие из них обеспечивают автомобилю высокую динамику уже при 800-1000 об/мин. Если же стать обладателем «дизеля», нет возможности, то подбирать машину лучше с двигателем, у которого максимальный крутящий момент развивается при более низких оборотах. Такой автомобиль легче разгонять. В противном случае двигатель придется «насиловать» высокими оборотами, при которых и расход топлива выше и детали изнашиваются более интенсивно.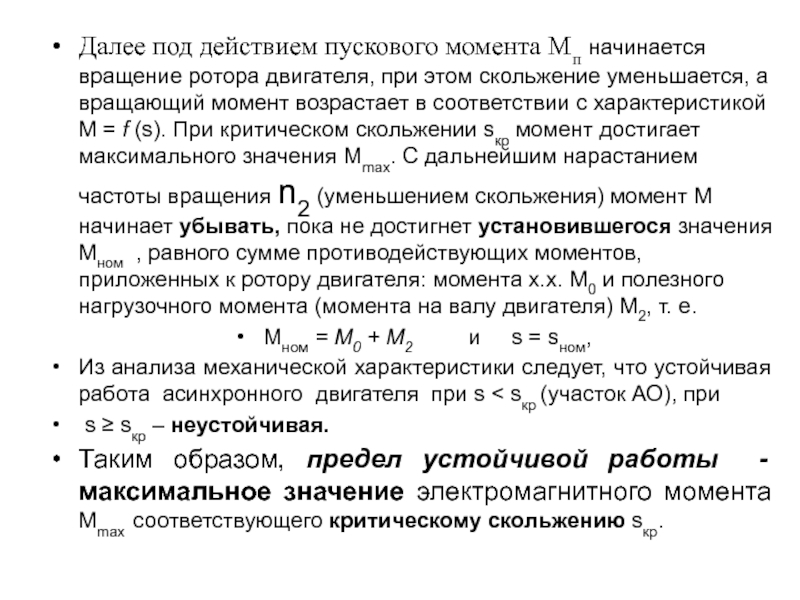
Те, кто следит за тенденциями развития автомобилестроения, могли заметить, что создатели двигателей стремятся «выровнять» кривую крутящего момента, т.е. сделать его практически одинаковым во всем диапазоне оборотов. Делается это для того, чтобы исключить провалы на режимах, когда величина крутящего момента еще или уже не позволяет передать на колеса большую силу тяги.
Один из таких моторов – 2,7-литровый V-образный шестицилиндровый турбированный двигатель Audi. Этот 250-сильный двигатель развивает огромный крутящий момент 350 Н•м в широком диапазоне оборотов – от 1800 до 4500. Другой подобный, хотя и менее мощный двигатель предлагает концерн Volkswagen. Его 1,8-литровый 180-сильный турбированный мотор развивает крутящий момент 228 Н•м в диапазоне оборотов от 2000 до 5000. Ездить на машинах с такими двигателями сплошное удовольствие – независимо от оборотов при нажатии на педаль «газа» автомобиль одинаково динамичен (приемист) и не только позволяет любителям спортивной езды полностью реализовать свои желания, но и при спокойной езде способствует уверенным обгонам, перестроениям и движению при полной загрузке.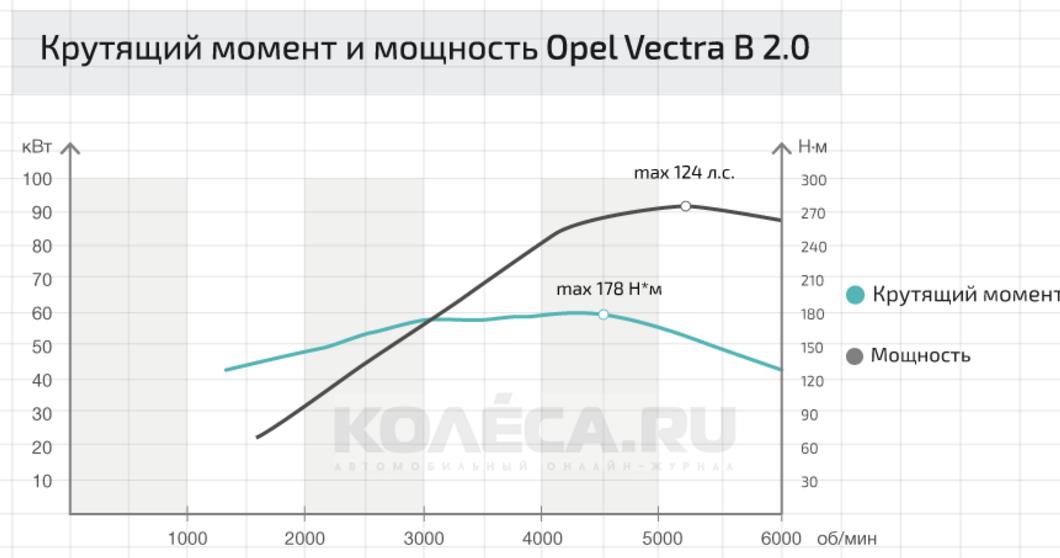
Повышение и «выравнивание» крутящего момента в современных двигателях обеспечивают различными путями: устанавливают по три, четыре и даже пять клапанов на цилиндр, механизмы изменений фаз газораспределения, впускные тракты делают с изменяемой длиной, крыльчатки турбин делают керамическими и регулируемыми с изменяемым углом наклона лопаток и т.д. Вся эта модернизация направлена на совершенствование процессов наполнения цилиндров свежим зарядом. Наибольшего результата в этом деле добились инженеры SAAB. В свой пока еще экспериментальный двигатель SAAB Variable Compression объемом всего 1,6 л они умудрились заложить мощность, равную 225 л.с. и крутящий момент 305 Н•м. Добиться столь высоких показателей шведским моторостроителям удалось благодаря возможности изменения объема камеры сгорания и соответственно степени сжатия (от 14:1 до 8:1) в зависимости от режимов работы двигателя. Получению этих характеристик способствует и система наддува воздуха под высоким давлением – 2,8 атм., четыре клапана на цилиндр и система промежуточного охлаждения воздуха (Intercooler) (см. «Автоцентр» №14 ‘2000).
«Автоцентр» №14 ‘2000).
Мощность
А как же обстоит дело с таким популярным показателем как мощность? Здесь ситуация складывается следующим образом. Наверное, многие замечали, что рядом с указываемой в характеристике мощностью всегда стоит значение оборотов коленчатого вала, при которых двигатель развивает эту мощность. Как правило, эти обороты приближены к максимальным. Во всех других режимах двигатель выдает только некоторую часть указанной мощности.
Почему так происходит, хорошо видно из формулы для вычисления мощности двигателя (кВт) – N=Mкрn/9549, где Mкр – средний крутящий момент двигателя (Н.м), n – обороты коленчатого вала двигателя (об/мин). Из формулы следует, что на значение мощности влияют величины крутящего момента и обороты двигателя. Но так как численные значения оборотов двигателя в десятки раз превышают величину крутящего момента (например, 3000 об/мин и 120 Н.м), то и на изменение мощности они будут влиять в большей степени. Это еще одно доказательство того, что силу мотора мощность отражает косвенно.
Вышесказанное подтверждается следующим примером. Когда мы едем по трассе с постоянной скоростью, приложенная к ведущим колесам автомобиля сила тяги расходуется на преодоление всевозможных сил сопротивления движению (аэродинамическую, качению колес и т.д.) и трение в различных механизмах. Но когда возникает потребность резко ускориться для обгона, сделать это удается не всегда, так как появляется необходимость преодолевать появившиеся силы инерции. В этом случае говорят, что у двигателя не хватает мощности. Но мощность здесь ни при чем, так как со всеми силами сопротивления движению борется сила тяги, зависящая от величины крутящего момента двигателя. Чтобы увеличить силу тяги, необходим запас крутящего момента. Величина этого запаса и влияет на то, как быстро сможет ускориться автомобиль.
Для получения более резкого ускорения можно, конечно, и переключиться на пониженную передачу, когда передаточное число трансмиссии станет большим и сила тяги на колесах увеличится. Однако при этом есть опасность «перекрутить» двигатель, да и дальнейшего ускорения мы можем не получить, так как режим работы двигателя может быть приближен к экстремальному. Аналогичная ситуация складывается и на подъемах, когда запас крутящего момента одних двигателей позволяет продолжить движение, а у других его отсутствие требует перехода на пониженную передачу.
Аналогичная ситуация складывается и на подъемах, когда запас крутящего момента одних двигателей позволяет продолжить движение, а у других его отсутствие требует перехода на пониженную передачу.
Вывод отсюда напрашивается следующий: какой бы мощностью ни обладал двигатель, а способность разгонять автомобиль и «вытаскивать» его на подъем полностью возложена на крутящий момент. Возникает вполне справедливый вопрос: что же означает мощность? Это универсальный показатель, в который заложили целый ряд характеристик автомобильного двигателя – энергоемкость, потребление топлива, тяговая способность
Учебное пособие по электродвигателям постоянного тока— Расчет электродвигателей постоянного тока без сердечника с щетками
Расчет двигателей для двигателей постоянного тока без сердечника с щеткой
При выборе бесщеточного двигателя постоянного тока без сердечника для приложения или при разработке прототипа с приводом необходимо учитывать несколько основных принципов физики двигателя, которые необходимо учитывать для создания надежной, хорошо функционирующей и достаточно мощной прецизионной приводной системы. В этом документе мы предоставили некоторые важные методы, формулы и детали расчетов для определения выходной мощности двигателя без сердечника, кривую скорость-крутящий момент двигателя, графики тока и эффективности, а также теоретические расчеты в холодном состоянии, которые оценивают характеристики двигателя.
В этом документе мы предоставили некоторые важные методы, формулы и детали расчетов для определения выходной мощности двигателя без сердечника, кривую скорость-крутящий момент двигателя, графики тока и эффективности, а также теоретические расчеты в холодном состоянии, которые оценивают характеристики двигателя.
являются преобразователями, потому что они преобразуют электрическую энергию ( P в ) в механическую энергию ( P из ). Частное обоих членов соответствует КПД двигателя. Потери на трение и потери в меди приводят к общей потере мощности ( P потери ) в Джоулях / сек (потери в железе в двигателях постоянного тока без сердечника пренебрежимо малы). Существуют дополнительные потери из-за нагрева, но мы обсудим их ниже:
В физике мощность определяется как скорость выполнения работы.Стандартная метрическая единица измерения мощности — «ватт» Вт.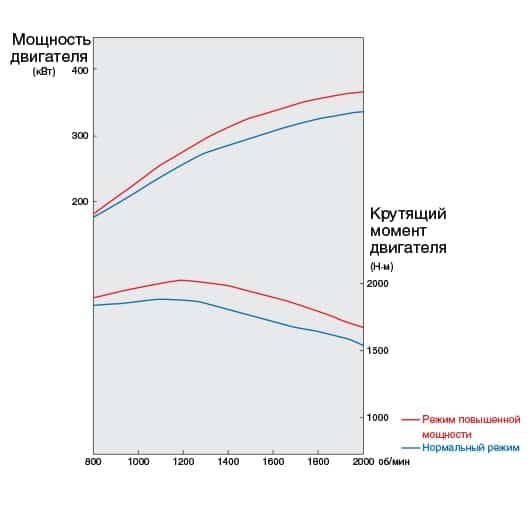 Как рассчитывается мощность? Для линейного движения мощность — это произведение силы и расстояния в единицу времени P = F · (d / t) . Поскольку скорость — это расстояние во времени, уравнение принимает следующий вид: P = F · s . В случае вращательного движения аналогичный расчет мощности представляет собой произведение крутящего момента и углового расстояния в единицу времени или просто произведение крутящего момента и угловой скорости.
Как рассчитывается мощность? Для линейного движения мощность — это произведение силы и расстояния в единицу времени P = F · (d / t) . Поскольку скорость — это расстояние во времени, уравнение принимает следующий вид: P = F · s . В случае вращательного движения аналогичный расчет мощности представляет собой произведение крутящего момента и углового расстояния в единицу времени или просто произведение крутящего момента и угловой скорости.
Где:
P = Мощность, Вт
M = Крутящий момент, Нм
F = Сила, Н
d = Расстояние в м
t = Время в с
ω рад = угловая скорость в рад / с
Символ, используемый для крутящего момента, обычно представляет собой строчную греческую букву «τ» (тау) или иногда просто букву «T» .Однако, когда он называется «Момент силы», его обычно обозначают буквой «М» .
часто используется строчная буква « n » для обозначения скорости вокруг оси. Обычно « n » выражается в единицах оборотов в минуту или об / мин.
При расчете механической мощности важно учитывать единицы измерения. При расчете мощности, если « n » (скорость) находится в мин. -1 , то вы должны преобразовать это значение в угловую скорость в единицах рад / с .Это достигается путем умножения скорости на коэффициент преобразования 2π / 60 . Кроме того, если « M » (крутящий момент) находится в мНм , то мы должны умножить это на 10 -3 (разделить на 1 000), чтобы преобразовать единицы в Нм для целей расчета.
Где:
n = Скорость в мин. -1
M = Крутящий момент в мНм
Предположим, что необходимо определить мощность, которую конкретный двигатель 2668W024CR должен выдавать в холодном режиме с крутящим моментом 68 мНм при скорости 7 370 мин. -1 .Произведение крутящего момента, скорости и соответствующего коэффициента преобразования показано ниже.
-1 .Произведение крутящего момента, скорости и соответствующего коэффициента преобразования показано ниже.
Расчет начальной требуемой мощности часто используется в качестве предварительного шага при выборе двигателя или мотор-редуктора. Если механическая выходная мощность, необходимая для данного приложения, известна, то можно проверить максимальную или продолжительную номинальную мощность для различных двигателей, чтобы определить, какие двигатели являются возможными кандидатами для использования в данном приложении.
Ниже приведен метод определения параметров двигателя на примере двигателя постоянного тока без сердечника 2668W024CR.Сначала мы объясним более эмпирический подход, а затем проведем теоретический расчет.
Одним из широко используемых методов графического построения характеристик двигателя является использование кривых крутящий момент-скорость. Хотя использование кривых крутящий момент-скорость гораздо чаще встречается в технической литературе для более крупных машин постоянного тока, чем для небольших устройств без сердечника, этот метод применим в любом случае.
Обычно кривые крутящий момент-скорость генерируются путем построения графика скорости двигателя, тока двигателя, механической выходной мощности и эффективности в зависимости от крутящего момента двигателя.Следующее обсуждение будет описывать построение набора кривых крутящего момента-скорости для типичного двигателя постоянного тока на основе серии измерений необработанных данных.
2668W024CR имеет номинальное напряжение 24 В. Если у вас есть несколько основных частей лабораторного оборудования, вы можете измерить кривые крутящий момент-скорость для бессердечникового двигателя постоянного тока серии 2668 CR в заданной рабочей точке.
Шаг 1. Измерьте основные параметры
Многие параметры можно получить напрямую с помощью контроллера движения, такого как один из контроллеров движения FAULHABER MC3.Большинство производителей контроллеров предлагают программное обеспечение, такое как FAULHABER Motion Manager, которое включает функцию записи трассировки, которая отображает напряжение, ток, положение, скорость и т. Д. Они также могут предоставить точный снимок работы двигателя с мельчайшими подробностями. Например, семейство контроллеров движения MC3 (MC 5004, MC 5005 и MC 5010) может измерять множество параметров движения. Это, вероятно, самый быстрый метод получения данных для построения кривой крутящего момента — скорости, но это не единственный метод.
Д. Они также могут предоставить точный снимок работы двигателя с мельчайшими подробностями. Например, семейство контроллеров движения MC3 (MC 5004, MC 5005 и MC 5010) может измерять множество параметров движения. Это, вероятно, самый быстрый метод получения данных для построения кривой крутящего момента — скорости, но это не единственный метод.
Если контроллер с функцией записи трассировки недоступен, мы также можем использовать некоторое базовое лабораторное оборудование для определения характеристик двигателя в условиях остановки, номинальной нагрузки и холостого хода. Используя источник питания 24 В, запустите 2668W024CR без нагрузки и измерьте скорость вращения с помощью бесконтактного тахометра (например, стробоскопа). Кроме того, измерьте ток двигателя в этом состоянии без нагрузки. Токовый пробник идеально подходит для этого измерения, поскольку он не добавляет сопротивления последовательно с работающим двигателем.Используя регулируемую крутящую нагрузку, такую как тормоз для мелких частиц или регулируемый гистерезисный динамометр, нагрузка может быть связана с валом двигателя.
Теперь увеличьте крутящий момент на двигателе точно до точки. где происходит срыв. При остановке измерьте крутящий момент от тормоз и ток двигателя. Ради этого обсуждение, предположим, что муфта не добавляет нагрузки к двигатель и что нагрузка от тормоза не включать неизвестные фрикционные компоненты. Это также полезно на этом этапе для измерения оконечного сопротивления мотор.Измерьте сопротивление, соприкоснувшись с двигателем. клеммы с омметром. Затем раскрутите вал двигателя и сделайте еще одно измерение. Измерения должны быть очень близки по стоимости. Продолжайте вращать вал и сделайте не менее трех измерений. Это обеспечит что измерения не проводились в точке минимальный контакт на коммутаторе.
Теперь мы измерили:
n 0 = Скорость холостого хода
I 0 = Ток холостого хода
M H = Момент остановки
R = Терминальное сопротивление
Шаг 2: Постройте график зависимости тока отКрутящий момент и скорость в зависимости от крутящего момента
Вы можете подготовить график с крутящим моментом двигателя по абсциссе (горизонтальная ось), скоростью по левой ординате (вертикальная ось) и током по правой ординате. Масштабируйте оси на основе измерений, которые вы сделали на первом шаге. Проведите прямую линию от левого начала графика (нулевой крутящий момент и нулевой ток) до тока останова на правой ординате (крутящий момент при останове и ток останова). Эта линия представляет собой график зависимости тока двигателя от крутящего момента двигателя.Наклон этой линии представляет собой постоянную тока k I , которая является константой пропорциональности для отношения между током двигателя и крутящим моментом двигателя (в единицах тока на единицу крутящего момента или А / мНм). Обратной величине этого наклона является постоянная крутящего момента k M (в единицах крутящего момента на единицу тока или мНм / А).
Масштабируйте оси на основе измерений, которые вы сделали на первом шаге. Проведите прямую линию от левого начала графика (нулевой крутящий момент и нулевой ток) до тока останова на правой ординате (крутящий момент при останове и ток останова). Эта линия представляет собой график зависимости тока двигателя от крутящего момента двигателя.Наклон этой линии представляет собой постоянную тока k I , которая является константой пропорциональности для отношения между током двигателя и крутящим моментом двигателя (в единицах тока на единицу крутящего момента или А / мНм). Обратной величине этого наклона является постоянная крутящего момента k M (в единицах крутящего момента на единицу тока или мНм / А).
Где:
k I = постоянная тока
k M = постоянная момента
В целях данного обсуждения предполагается, что двигатель не имеет внутреннего трения. На практике момент трения двигателя M R определяется путем умножения постоянной крутящего момента двигателя k M на измеренный ток холостого хода I 0 . Линия зависимости крутящего момента от скорости и линия зависимости крутящего момента от тока затем начинаются не с левой вертикальной оси, а со смещением по горизонтальной оси, равным расчетному моменту трения.
На практике момент трения двигателя M R определяется путем умножения постоянной крутящего момента двигателя k M на измеренный ток холостого хода I 0 . Линия зависимости крутящего момента от скорости и линия зависимости крутящего момента от тока затем начинаются не с левой вертикальной оси, а со смещением по горизонтальной оси, равным расчетному моменту трения.
Где:
M R = момент трения
Шаг 3: Построение графика Power vs.Крутящий момент и эффективность в зависимости от крутящего момента
В большинстве случаев можно добавить две дополнительные вертикальные оси для построения графика зависимости мощности и КПД от крутящего момента. Вторая вертикальная ось обычно используется для оценки эффективности, а третья вертикальная ось может использоваться для мощности. Для упрощения этого обсуждения КПД в зависимости от крутящего момента и мощность в зависимости от крутящего момента будут нанесены на тот же график, что и графики зависимости скорости от крутящего момента и тока от крутящего момента (пример показан ниже).
Составьте таблицу механической мощности двигателя в различных точках от момента холостого хода до момента остановки.Поскольку выходная механическая мощность — это просто произведение крутящего момента и скорости с поправочным коэффициентом для единиц (см. Раздел о вычислении начальной требуемой мощности), мощность может быть рассчитана с использованием ранее построенной линии для зависимости скорости от крутящего момента.
Примерная таблица расчетов для двигателя 2668W024CR приведена в таблице 1. Затем на график наносится каждая расчетная точка мощности. Результирующая функция представляет собой параболическую кривую, показанную ниже на Графике 1. Максимальная механическая мощность достигается примерно при половине крутящего момента сваливания.Скорость в этот момент составляет примерно половину скорости холостого хода.
Создайте таблицу в электронной таблице КПД двигателя в различных точках от скорости холостого хода до крутящего момента при остановке. Приведено напряжение, приложенное к двигателю, и нанесен график силы тока при различных уровнях крутящего момента. Произведение тока двигателя и приложенного напряжения является мощностью, потребляемой двигателем. В каждой точке, выбранной для расчета, КПД двигателя η представляет собой выходную механическую мощность, деленную на потребляемую электрическую мощность.И снова примерная таблица для двигателя 2668W024CR показана в Таблице 1, а примерная кривая — на Графике 1. Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке.
Приведено напряжение, приложенное к двигателю, и нанесен график силы тока при различных уровнях крутящего момента. Произведение тока двигателя и приложенного напряжения является мощностью, потребляемой двигателем. В каждой точке, выбранной для расчета, КПД двигателя η представляет собой выходную механическую мощность, деленную на потребляемую электрическую мощность.И снова примерная таблица для двигателя 2668W024CR показана в Таблице 1, а примерная кривая — на Графике 1. Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке.
Определения сюжета
- Синий = скорость по сравнению с крутящим моментом ( n по сравнению с M )
- Красный = ток по сравнению с крутящим моментом ( I по сравнению с M )
- Зеленый = эффективность по сравнению с крутящим моментом ( η или . M )
- Коричневый = мощность в зависимости от крутящего момента ( P vs.
 М )
М )
Характеристики двигателя
Примечание. Пунктирные линии представляют значения, которые могут быть получены для холодного двигателя (без повышения температуры), однако сплошные линии учитывают влияние магнита и змеевик подогрева на теплом моторе (об этом позже). Обратите внимание, как все четыре сплошных графика изменяются в результате увеличения сопротивления в медных обмотках и ослабления. выходной крутящий момент из-за нагрева. Таким образом, ваши результаты могут немного отличаться в зависимости от того, холодный или теплый ваш двигатель, когда вы строите графики.Теоретический расчет параметров двигателя
Еще одним полезным параметром при выборе двигателя является постоянная двигателя. Правильное использование этой добротности существенно сократит итерационный процесс выбора двигателя постоянного тока. Он просто измеряет внутреннюю способность преобразователя преобразовывать электрическую энергию в механическую.
Максимальный КПД достигается примерно при 10% крутящего момента двигателя. Знаменатель называется потерей резистивной мощности. С помощью некоторых алгебраических манипуляций уравнение можно упростить до:
Имейте в виду, что k m (постоянная двигателя) не следует путать с k M (постоянная момента).Обратите внимание, что индекс константы двигателя — это строчная буква « m », а индекс постоянной крутящего момента — прописная « M ».
Для щеточного или бесщеточного двигателя постоянного тока относительно небольшого размера отношения, которые определяют поведение двигателя в различных обстоятельствах, могут быть выведены из законов физики и характеристик самих двигателей. Правило Кирхгофа по напряжению гласит: «Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала.При применении к двигателю постоянного тока, последовательно соединенному с источником питания постоянного тока, правило Кирхгофа может быть выражено следующим образом: «Номинальное напряжение питания от источника питания должно быть равно сумме падений напряжения на сопротивлении обмоток и обратная ЭДС, генерируемая двигателем ».
Где:
U = Электропитание в В
I = Ток в А
R = Терминальное сопротивление в Ом
U E = Противо-ЭДС в В
Обратная ЭДС, создаваемая двигателем, прямо пропорциональна угловой скорости двигателя.Константа пропорциональности — это постоянная обратной ЭДС двигателя.
Где:
ω = Угловая скорость двигателя
k E = Постоянная обратной ЭДС двигателя
Следовательно, путем подстановки:
Постоянная обратной ЭДС двигателя обычно указывается производителем двигателя в В / об / мин или мВ / об / мин. Чтобы получить значимое значение для обратной ЭДС, необходимо указать скорость двигателя в единицах, совместимых с указанной постоянной обратной ЭДС.
«Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала».
(Правило напряжения Кирхгофа)
Постоянная двигателя зависит от конструкции катушки, силы и направления магнитных линий в воздушном зазоре. Хотя можно показать, что три обычно заданные постоянные двигателя (постоянная противо-ЭДС, постоянная крутящего момента и постоянная скорости) равны, если используются надлежащие единицы, расчет облегчается указанием трех констант в общепринятых единицах.
Хотя можно показать, что три обычно заданные постоянные двигателя (постоянная противо-ЭДС, постоянная крутящего момента и постоянная скорости) равны, если используются надлежащие единицы, расчет облегчается указанием трех констант в общепринятых единицах.
Крутящий момент, создаваемый ротором, прямо пропорционален току в обмотках якоря. Константа пропорциональности — это постоянная крутящего момента двигателя.
Где:
M м = крутящий момент, развиваемый на двигателе
k M = постоянная крутящего момента двигателя
Подставляя это соотношение для получения текущего ресурса:
Крутящий момент, развиваемый на роторе, равен моменту трения двигателя плюс момент нагрузки (из-за внешней механической нагрузки):
Где:
M R = Момент трения двигателя
M L = Момент нагрузки
Предполагая, что на клеммы двигателя подается постоянное напряжение, скорость двигателя будет прямо пропорциональна сумме момента трения и момента нагрузки. Константа пропорциональности — это наклон кривой крутящий момент-скорость. Моторные характеристики лучше, когда это значение меньше. Чем круче спад наклона, тем хуже производительность, которую можно ожидать от данного двигателя без сердечника. Это соотношение можно рассчитать по:
Константа пропорциональности — это наклон кривой крутящий момент-скорость. Моторные характеристики лучше, когда это значение меньше. Чем круче спад наклона, тем хуже производительность, которую можно ожидать от данного двигателя без сердечника. Это соотношение можно рассчитать по:
Где:
Δn = Изменение скорости
ΔM = Изменение крутящего момента
M H = Тормозной момент
n 0 = Скорость холостого хода
Альтернативный подход к получению этого значение — найти скорость, n :
Используя исчисление, мы дифференцируем обе стороны относительно M , что дает:
Хотя здесь мы не показываем отрицательный знак,
это подразумевается
что результат приведет к уменьшению (отрицательному)
наклон.
Пример теоретического расчета двигателя
Давайте немного углубимся в теоретические расчеты. Двигатель постоянного тока без сердечника 2668W024CR должен работать при напряжении 24 В на клеммах двигателя и крутящем моменте 68 мНм. Найдите результирующую константу двигателя, скорость двигателя, ток двигателя, КПД двигателя и выходную мощность. Из таблицы данных двигателя видно, что скорость холостого хода двигателя при 24 В составляет 7 800 мин -1 .Если крутящий момент не связан с валом двигателя, двигатель будет работать с этой скоростью.
Во-первых, давайте получим общее представление о характеристиках двигателя, вычислив постоянную двигателя k m . В этом случае мы получаем константу 28,48 мНм / кв.рт. (Вт).
Скорость двигателя под нагрузкой — это просто скорость без нагрузки за вычетом снижения скорости из-за нагрузки. Константа пропорциональности для отношения между скоростью двигателя и крутящим моментом двигателя — это крутизна зависимости крутящего момента отКривая скорости, заданная делением скорости холостого хода двигателя на крутящий момент при останове. В этом примере мы вычислим снижение скорости (без учета температурных эффектов), вызванное нагрузкой крутящего момента 68 мНм, исключив единицы измерения мНм:
В этом примере мы вычислим снижение скорости (без учета температурных эффектов), вызванное нагрузкой крутящего момента 68 мНм, исключив единицы измерения мНм:
Теперь через замену:
Тогда скорость двигателя под нагрузкой должна быть приблизительно:
Ток двигателя под нагрузкой — это сумма тока холостого хода и тока, возникающего в результате нагрузки.
Константа пропорциональности тока и крутящего момента нагрузки — это постоянная крутящего момента ( k M ) . Это значение составляет 28,9 мНм / А. Взяв обратную величину, мы получаем постоянную тока к I , которая может помочь нам рассчитать ток при нагрузке. В этом случае нагрузка составляет 68 мНм, а ток, возникающий в результате этой нагрузки (без учета нагрева), приблизительно равен:
Это значение составляет 28,9 мНм / А. Взяв обратную величину, мы получаем постоянную тока к I , которая может помочь нам рассчитать ток при нагрузке. В этом случае нагрузка составляет 68 мНм, а ток, возникающий в результате этой нагрузки (без учета нагрева), приблизительно равен:
Полный ток двигателя можно приблизительно определить, суммируя это значение с током холостого хода двигателя.В таблице данных указан ток холостого хода двигателя как 78 мА. После округления общий ток примерно:
Выходная механическая мощность двигателя — это просто произведение скорости двигателя и крутящего момента с поправочным коэффициентом для единиц (если требуется). Следовательно, выходная мощность двигателя будет примерно:
.Подводимая к двигателю механическая мощность является произведением приложенного напряжения и общего тока двигателя в амперах. В этом приложении:
Так как КПД η — это просто выходная мощность, деленная на входную мощность, давайте посчитаем ее в нашей рабочей точке:
Оценка температуры обмотки двигателя во время работы:
А ток I , протекающий через сопротивление R , приводит к потере мощности в виде тепла I 2 · R . В случае двигателя постоянного тока произведение квадрата полного тока двигателя и сопротивления якоря является потерей мощности в виде тепла в обмотках якоря. Например, если общий ток двигателя составлял 0,203 А, а сопротивление якоря 14,5 Ом, потери мощности в виде тепла в обмотках составят:
В случае двигателя постоянного тока произведение квадрата полного тока двигателя и сопротивления якоря является потерей мощности в виде тепла в обмотках якоря. Например, если общий ток двигателя составлял 0,203 А, а сопротивление якоря 14,5 Ом, потери мощности в виде тепла в обмотках составят:
Тепло, возникающее в результате потерь в катушке I 2 · R , рассеивается за счет теплопроводности через компоненты двигателя и воздушного потока в воздушном зазоре. Легкость, с которой это тепло может рассеиваться в двигателе (или любой системе), определяется тепловым сопротивлением.
Термическое сопротивление (которое является обратной величиной теплопроводности) показывает, насколько хорошо материал сопротивляется передаче тепла по заданному пути. Производители двигателей обычно указывают способность двигателя рассеивать тепло, предоставляя значения термического сопротивления R th . Например, алюминиевая пластина с большим поперечным сечением будет иметь очень низкое тепловое сопротивление, тогда как значения для воздуха или вакуума будут значительно выше. В случае двигателей постоянного тока существует тепловой путь от обмоток двигателя к корпусу двигателя и второй тепловой канал между корпусом двигателя и окружающей средой двигателя (окружающий воздух и т. Д.)). Некоторые производители двигателей указывают тепловое сопротивление для каждого из двух тепловых путей, в то время как другие указывают только их сумму в качестве общего теплового сопротивления двигателя. Значения термического сопротивления указаны в увеличении температуры на единицу потери мощности. Суммарные потери I 2 · R в катушке (источнике тепла) умножаются на тепловое сопротивление для определения установившейся температуры якоря. Повышение температуры в установившемся режиме двигателя ( T ) определяется по формуле:
В случае двигателей постоянного тока существует тепловой путь от обмоток двигателя к корпусу двигателя и второй тепловой канал между корпусом двигателя и окружающей средой двигателя (окружающий воздух и т. Д.)). Некоторые производители двигателей указывают тепловое сопротивление для каждого из двух тепловых путей, в то время как другие указывают только их сумму в качестве общего теплового сопротивления двигателя. Значения термического сопротивления указаны в увеличении температуры на единицу потери мощности. Суммарные потери I 2 · R в катушке (источнике тепла) умножаются на тепловое сопротивление для определения установившейся температуры якоря. Повышение температуры в установившемся режиме двигателя ( T ) определяется по формуле:
Где:
ΔT = Изменение температуры в К
I = Ток через обмотки двигателя в А
R = Сопротивление обмоток двигателя в Ом
R th2 = Тепловое сопротивление от обмоток к корпусу в к / Вт
R th3 = Тепловое сопротивление корпуса к окружающей среде в к / Вт
Давайте продолжим наш пример, используя двигатель 2668W024CR, работающий с током 2458 А в обмотках двигателя, с сопротивлением якоря 1, 03 Ом, тепловое сопротивление между обмоткой и корпусом составляет 3 к / Вт, а тепловое сопротивление между корпусом и окружающей средой — 8 к / Вт.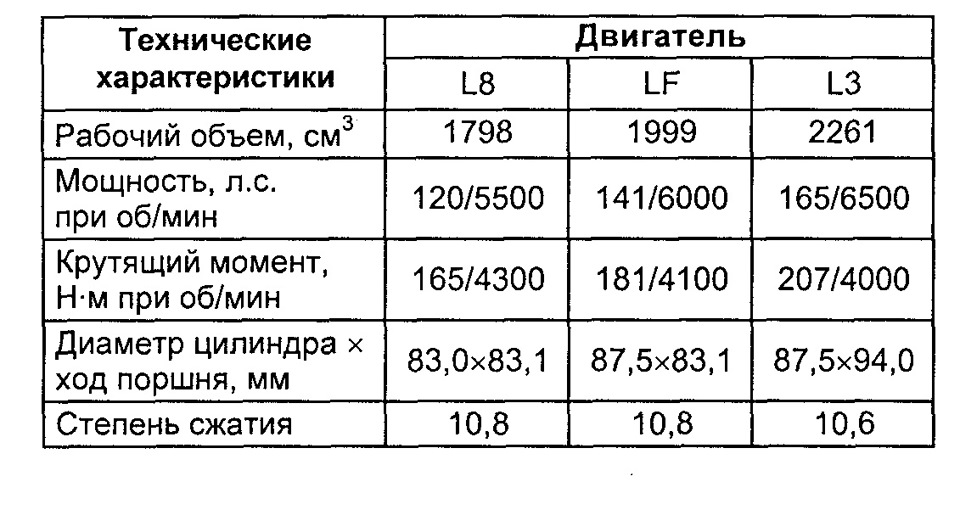 Повышение температуры обмоток рассчитывается по формуле ниже; мы можем заменить Ploss на I 2 · R :
Повышение температуры обмоток рассчитывается по формуле ниже; мы можем заменить Ploss на I 2 · R :
Поскольку шкала Кельвина использует то же приращение единиц, что и шкала Цельсия, мы можем просто подставить значение Кельвина, как если бы оно было значением Цельсия. Если предположить, что температура окружающего воздуха составляет 22 ° C, то конечная температура обмоток двигателя может быть приблизительно равна:
Где:
T теплый = Температура обмотки
Важно убедиться, что конечная температура обмоток не превышает номинальное значение двигателя, указанное в техническом паспорте.В приведенном выше примере максимально допустимая температура обмотки составляет 125 ° C. Поскольку расчетная температура обмотки составляет всего 90,4 ° C, тепловое повреждение обмоток двигателя не должно быть проблемой в этом приложении.
Можно использовать аналогичные вычисления, чтобы ответить на вопросы другого типа. Например, приложение может потребовать, чтобы двигатель работал с максимальным крутящим моментом, в надежде, что он не будет поврежден из-за перегрева. Предположим, желательно запустить двигатель с максимально возможным крутящим моментом при температуре окружающего воздуха 22 ° C.Дизайнер хочет знать, какой крутящий момент двигатель может безопасно обеспечить без перегрева. Опять же, в техническом описании двигателя постоянного тока без сердечника 2668W024CR указана максимальная температура обмотки 125 ° C. Итак, поскольку температура окружающей среды составляет 22 ° C, максимально допустимое повышение температуры ротора составляет: 125 ° C — 22 ° C = 103 ° C
Например, приложение может потребовать, чтобы двигатель работал с максимальным крутящим моментом, в надежде, что он не будет поврежден из-за перегрева. Предположим, желательно запустить двигатель с максимально возможным крутящим моментом при температуре окружающего воздуха 22 ° C.Дизайнер хочет знать, какой крутящий момент двигатель может безопасно обеспечить без перегрева. Опять же, в техническом описании двигателя постоянного тока без сердечника 2668W024CR указана максимальная температура обмотки 125 ° C. Итак, поскольку температура окружающей среды составляет 22 ° C, максимально допустимое повышение температуры ротора составляет: 125 ° C — 22 ° C = 103 ° C
Теперь мы можем рассчитать увеличение сопротивления катушки из-за рассеивания тепловой мощности:
Где:
α Cu = Температурный коэффициент меди в единицах K -1
(Обратный Кельвин)
Таким образом, из-за нагрева катушки и магнита из-за рассеивания мощности от потерь I 2 · R сопротивление катушки увеличилось с 1,03 Ом до 1,44 Ом. Теперь мы можем пересчитать новую постоянную крутящего момента k M , чтобы увидеть влияние повышения температуры на характеристики двигателя:
Теперь мы можем пересчитать новую постоянную крутящего момента k M , чтобы увидеть влияние повышения температуры на характеристики двигателя:
Где:
α M = Температурный коэффициент магнита в единицах K -1
(Обратный Кельвин)
Теперь мы пересчитываем новую константу обратной ЭДС k E и наблюдаем за результатами. Из формулы, полученной нами выше:
Как мы видим, постоянная крутящего момента ослабевает в результате повышения температуры, как и константа обратной ЭДС! Таким образом, сопротивление обмотки двигателя, постоянная крутящего момента и обратная ЭДС — все это отрицательно сказывается по той простой причине, что они зависят от температуры.
Мы могли бы продолжить вычисление дополнительных параметров в результате более горячей катушки и магнита, но лучшие результаты дает выполнение нескольких итераций, что лучше всего выполняется с помощью программного обеспечения для количественного анализа. По мере того, как температура двигателя продолжает расти, каждый из трех параметров будет изменяться таким образом, что ухудшает характеристики двигателя и увеличивает потери мощности. При непрерывной работе двигатель может даже достичь точки «теплового разгона», что потенциально может привести к невозможности ремонта двигателя.Это может произойти, даже если первоначальные расчеты показали приемлемое повышение температуры (с использованием значений R и k M при температуре окружающей среды).
По мере того, как температура двигателя продолжает расти, каждый из трех параметров будет изменяться таким образом, что ухудшает характеристики двигателя и увеличивает потери мощности. При непрерывной работе двигатель может даже достичь точки «теплового разгона», что потенциально может привести к невозможности ремонта двигателя.Это может произойти, даже если первоначальные расчеты показали приемлемое повышение температуры (с использованием значений R и k M при температуре окружающей среды).
Обратите внимание, что максимально допустимый ток через обмотки двигателя может быть увеличен за счет уменьшения теплового сопротивления двигателя. Тепловое сопротивление между ротором и корпусом R th2 в первую очередь определяется конструкцией двигателя. Тепловое сопротивление корпуса R th3 можно значительно уменьшить, добавив радиаторы.Тепловое сопротивление двигателя для небольших двигателей постоянного тока обычно указывается для двигателя, подвешенного на открытом воздухе. Поэтому обычно наблюдается некоторый отвод тепла в результате простой установки двигателя в теплопроводный каркас или шасси. Некоторые производители более крупных двигателей постоянного тока указывают тепловое сопротивление, когда двигатель установлен на металлической пластине известных размеров и из материала.
Поэтому обычно наблюдается некоторый отвод тепла в результате простой установки двигателя в теплопроводный каркас или шасси. Некоторые производители более крупных двигателей постоянного тока указывают тепловое сопротивление, когда двигатель установлен на металлической пластине известных размеров и из материала.
Для получения дополнительных сведений о расчетах электродвигателя постоянного тока без сердечника и о том, как на производительность электродвигателя может повлиять рассеяние тепловой мощности, обратитесь к квалифицированному инженеру FAULHABER.Мы всегда готовы помочь.
Формулы и расчеты, приведенные ниже, должны использоваться только для оценки. Заказчик обязан указать требуемые мощность двигателя, крутящий момент и время разгона для своего приложения. Продавец может пожелать проверить указанные заказчиком значения с помощью формул в этом разделе, однако, если есть серьезные сомнения в отношении приложения заказчика или если заказчик требует гарантированной производительности двигателя / приложения, заказчик должен нанять инженера-электрика для точного определения расчеты. Чтобы получить подробное описание каждой формулы, нажмите на ссылки ниже, чтобы перейти прямо к ней. Практические правила (приближение)Механические формулы
Преобразование температуры градус C = (градус F — 32) x 5/9 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
преобразование температуры Формула
Высокая инерционная нагрузка
Зависимость между мощностью, крутящим моментом и скоростью
Символы
Эквивалентная инерция В механических системах все вращающиеся части обычно не работают с одинаковой скоростью . Общий эквивалент WK 2 для системы представляет собой сумму WK 2 каждой части, относящуюся к скорости первичного двигателя. Уравнение говорит:
Для вентиляторов и нагнетателей:
Для оценки эффективность насоса может быть принята равной 0.70. Ускоряющий моментЭквивалентная инерция привода с регулируемой скоростью указывает энергию, необходимую для поддержания работы системы. Однако запуск или ускорение системы требует дополнительной энергии. Крутящий момент, необходимый для разгона кузова, равен WK 2 кузова, умноженному на изменение числа оборотов в минуту, деленное на 308-кратный интервал (в секундах), в котором происходит это ускорение:
Где:
Или
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 8 K + 0,6
8 K + 0,6  6
6 
 с. =
с. = с.
с. 99
99 Таким образом, нам необходимо определить «эквивалентную инерцию» каждой движущейся части при определенной скорости первичного двигателя.
Таким образом, нам необходимо определить «эквивалентную инерцию» каждой движущейся части при определенной скорости первичного двигателя.
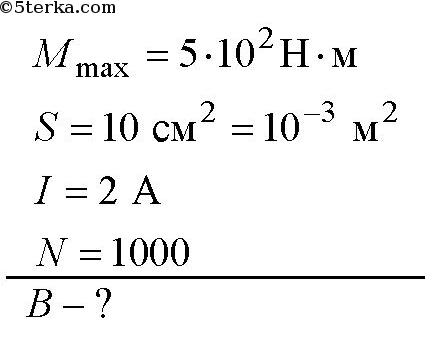 Это равно WK 2 первичного двигателя, плюс WK 2 времени редуктора (1/3) 2 , плюс WK 2 времени нагрузки (1/3) 2 .
Это равно WK 2 первичного двигателя, плюс WK 2 времени редуктора (1/3) 2 , плюс WK 2 времени нагрузки (1/3) 2 .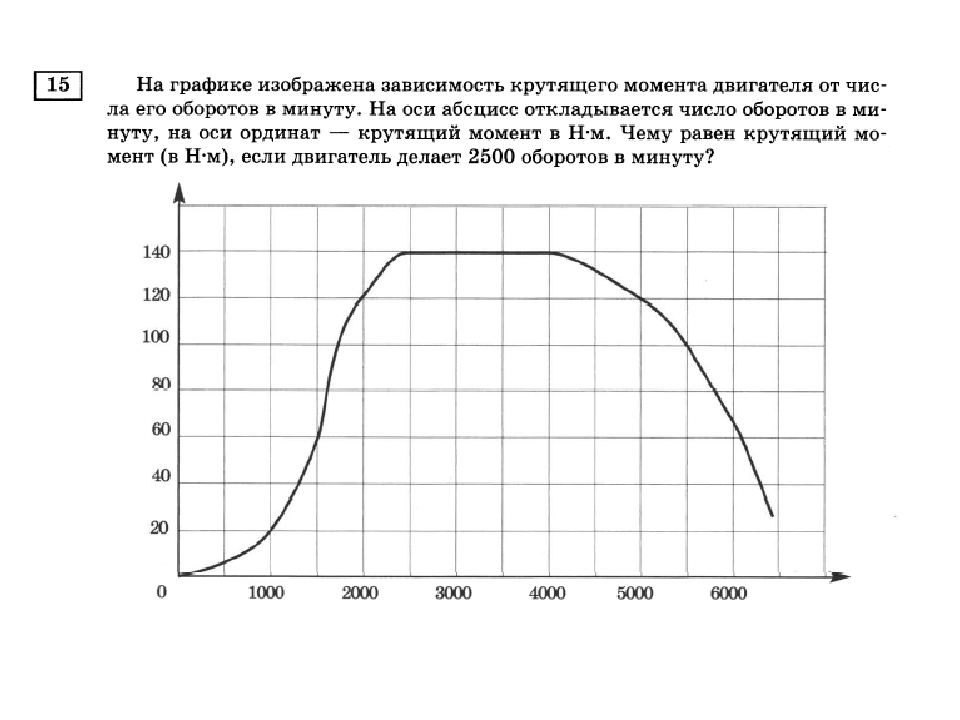 2 pm + 100 фунт-фут. 2 Красный + 3000 фунт-фут 2 Нагрузка
2 pm + 100 фунт-фут. 2 Красный + 3000 фунт-фут 2 Нагрузка