
Асинхронный и синхронный электродвигатели в автомобиле
Электродвигатели, работающие на том же законе, что и электромеханический преобразователь Якоби, тем не менее существенно от него отличаются. Электродвигатели разных типов обладают отличительными свойствами, которые обуславливают их область применения, в которой они наиболее полезны. Электрические двигатели становятся мощнее и компактнее, к тому же, их КПД значительно вырос. Так коэффициент полезного действия современного тягового электродвигателя может составлять 85-95 % в то время как максимальный КПД двигателя внутреннего сгорания без вспомогательных систем едва дотягивает 45 %. Вот о том, какими бывают асинхронный и синхронный электродвигатели в автомобиле, мы и поговорим в этой статье.
Содержание
- Асинхронный электродвигатель
- Устройство асинхронного электродвигателя
- Рабочие характеристики асинхронного электродвигателя
- Классы эффективности двигателей
- Синхронный электродвигатель
- Рабочие характеристики синхронного электродвигателя
- Электронно-коммутируемые двигатели
- Система трехфазного тока
- Создание вращающегося поля
Асинхронный электродвигатель
Асинхронный электродвигатель — основной привод, используемый в промышленности. К примеру, в автомобилестроении он используется в электроусилителях рулевого управления и в гибридных автомобилях. В следующем разделе представлена концепция работы асинхронного двигателя как индукционной машины. Приведен также энергетический анализ асинхронного двигателя в силу его явного преобладания среди приводов.
К примеру, в автомобилестроении он используется в электроусилителях рулевого управления и в гибридных автомобилях. В следующем разделе представлена концепция работы асинхронного двигателя как индукционной машины. Приведен также энергетический анализ асинхронного двигателя в силу его явного преобладания среди приводов.
Устройство асинхронного электродвигателя
Различают двигатели с внешним ротором и внутренним ротором. У двигателей с внешним ротором статор находится внутри ротора, у двигателей с внутренним ротором наоборот — ротор находится внутри статора. На принципиальной схеме (рис. «Принцип работы асинхронного двигателя» ) показана принципиальная схема асинхронного двигателя с внутренним ротором.
Ротор состоит из короткозамкнутого каркаса с пакетом пластин (рис. «Короткозамкнутая клетка асинхронного электродвигателя» ), в качестве примера с четырьмя короткозамкнутыми стержнями). Пакет пластин полностью заполняет пространство короткозамкнутого каркаса (на рис. не показано). Он состоит из отдельных стальных листов, изолированных друг от друга, чтобы свести к минимуму потери вихревых токов.
Пакет пластин полностью заполняет пространство короткозамкнутого каркаса (на рис. не показано). Он состоит из отдельных стальных листов, изолированных друг от друга, чтобы свести к минимуму потери вихревых токов.
Рабочие характеристики асинхронного электродвигателя
Обмотка статора создает вращающееся поле с трехфазным переменным током. Между скоростью вращающегося поля и скоростью ротора возникает разница, создающая индукцию магнитно-эффективного тока в роторе, которая в свою очередь способствует созданию крутящего момента.
Физический принцип работы основан на законе магнитной индукции. На рис. «Двухполосный короткозамкнутый ротор» изображен ротор в виде упрощенного проводящего контура на вращающихся креплениях. Относительное перемещение между статором и ротором описывает угловая частота (os. Магнитное поле ВЕ с угловой частотой, окружающее контур ротора, наводит напряжение в короткозамкнутом роторе в соответствии со вторым уравнением Максвелла:
ΦEds = -d/dt∫∫BEdA (уравнение 12)
На основании этого уравнения и конструктивных переменных двигателя (см. рис. 13) получаем:
рис. 13) получаем:
2E (l+2r) п = 2lr·ВЕ·ω sin(ωt) (уравнение 13)
где:
Е = I · Аnom/к (к — удельная электропроводность), напряжение создает магнитноэффективную мощность
i = (к·Аnomlr·ωs/(l+r))·sin(ωst) (уравнение 14)
в проводящем контуре, магнитное поле которого
Hind = i·N/lFe
и плотность потока (магнитная индукция)
Bind = μ·Hind
ослабляет исходное вращающееся поле ВЕ (индуктивное сопротивление). Нижеследующее уравнение применимо для получения результирующей магнитной индукции:
BR= BE-Bind
В уравнении Максвелла (уравнение 13) вместо ВЕ остается результирующая магнитная индукция BR. На проводящий контур воздействует тангенциальная сила Ft:
На проводящий контур воздействует тангенциальная сила Ft:
Ft = i l BR sin(ωst) (уравнение 15)
(сила Лоренца). Она используется для вычисления крутящего момента. Для уравнений 14 и 15 справедливо следующее:
M=2 Ft r = (2 k·Anom ωs/(l+r))·(lr·BR sin(ωst))2
На рис. «Распределение крутящего момента асинхронного двигателя» показаны две характеристические кривые. Одна из них отображает крутящий момент под влиянием индуктивного сопротивления. На него может повлиять геометрия вала ротора и выбор материалов. Другая кривая отображает крутящий момент без влияния индуктивного сопротивления. Это ограниченный случай для технической реализации.
При увеличении угловой частоты индуктивное сопротивление сначала приводит к увеличению крутящего момента вплоть до достижения переломного момента. Это максимально возможный крутящий момент двигателя. Впоследствии он падает из-за увеличивающегося влияния индуктивного сопротивления. Рассеяние мощности Рv, возникающее в проводящем контуре, вычисляется на основе сопротивления проводящего контура Rs и тока, наведенного в контуре is:
Впоследствии он падает из-за увеличивающегося влияния индуктивного сопротивления. Рассеяние мощности Рv, возникающее в проводящем контуре, вычисляется на основе сопротивления проводящего контура Rs и тока, наведенного в контуре is:
Pv = Rs— is2
Таким образом, рассеяние мощности растет пропорционально квадрату наведенного тока.
Классы эффективности двигателей
СЕМЕР Европейский Комитет изготовителей электродвигателей и силовой электроники) ввел классификацию эффективности на базе трех классов (EFF1, EFF2 и EFF3). Классы эффективности применяются к трехфазным асинхронным двигателям с двумя и четырьмя полюсами, а также с выходной мощностью от 1,1 до 90 кВт (рис. «Эффективность и выходная мощность» ).
Синхронный электродвигатель
Синхронные электродвигатели используются, в основном, в качестве генераторов переменного тока с клювообразными полюсами. В качестве электродвигателей они используются, например, в электроусилителях руля, в электроприводах гибридных автомобилей и в электроприводах турбонагнетателей.
В качестве электродвигателей они используются, например, в электроусилителях руля, в электроприводах гибридных автомобилей и в электроприводах турбонагнетателей.
Устройство синхронного электродвигателя
В отличие от асинхронного двигателя, в синхронном ротор вращается синхронно с полем возбуждения с угловой скоростью ωΦS. Магнитный поток ФR, создаваемый обмоткой ротора, и магнитный поток статора ФS накладываются друг на друга относительно результирующего магнитного потока ФRS (рис. «Базовая конструкция синхронного двигателя» ):
ФRS = ФR + ФS
Поскольку ротор и статор работают намного ниже уровня магнитного насыщения (μr—> ∞), воздушный зазор δ между ротором и статором, а также угол а определяют сопротивление магнитной цепи Rm.
Rm = 2δ/μ0 Ar = 2d/μ0 Ar cosa (уравнение 16).
Коэффициент 2 используется потому, что между ротором и статором имеются два зазора. Если электродвигатель выдает крутящий момент, то ротор вращается с углом а из положения холостого хода (рис. «Силы на роторе» ).
Результирующий магнитный поток ФRS рассчитывается по формуле:
ФRS = Θer/Rm + ФS
При Rm из уравнения 16 имеем:
Пример HTML-страницыФRS = (Θer μ0 Ar cosa + 2d·ФS) /2d
При Θer = NIer получаем:
ФRS = N Ier μ0 Ar cosa+2d ФS /2d (Уравнение 17).
Θer — это магнитное «захлебывание» ротора, а Iеr— ток возбуждения, подаваемый на ротор через контактные кольца. Влияющая на крутящий момент тангенциальная сила Ft вычисляется по формуле полюсной силы Максвелла:
Ft = (ФRS2/μ0 Ar) sin а (уравнение 18)
Тангенциальная сила используется для вычисления крутящего момента двигателя МM:
MM = 2Ft r (уравнение 19).
Уравнение 17 вставляется в уравнение 18 и результат в уравнении 19 дает следующую зависимость:
Мм=-(r sin а/μ0 Ar d2)·[(N Ier μ0 Ar cosa)2+4 N Ier μ0 Ar d ФS cosa + 4 d2 ФS2]
Первый член зависит только от тока возбуждения Ier и соответствует моменту от зубцовых гармонических помех поля. Второй член создает момент двигателя в решающей степени. Здесь можно увидеть линейную зависимость «захлебывания» ротора Θ = IerN и магнитного потока статора Фs. Третий член также создает крутящий момент и зависит лишь от магнитного потока статора.
Второй член создает момент двигателя в решающей степени. Здесь можно увидеть линейную зависимость «захлебывания» ротора Θ = IerN и магнитного потока статора Фs. Третий член также создает крутящий момент и зависит лишь от магнитного потока статора.
Рост внешнего нагружающего момента приводит к увеличению угла нагрузки а и, стало быть, к изменению момента двигателя Мм (рис. «Кривая момента и угла отклонения» ). Максимальный создаваемый двигателем момент обозначается как Мк в положении ак. При превышении ак электродвигатель «буксует».
Рабочие характеристики синхронного электродвигателя
Схема синхронного двигателя может быть выполнена в виде однофазной эквивалентной электрической схемы, где источником напряжения считается напряжение, индуцируемое ротором в статоре (напряжение на полюсном колесе Up, а остаточные индуктивные сопротивления складываются, образуя синхронное сопротивление ХS (рис. «Однофазная эквивалентная электрическая схема синхронного электродвигателя» ). Напряжение сверх синхронного сопротивления обозначается как Us, а напряжение на клеммах — U0. Направление тока указывается в соответствии с системой стрелок для устройств-потребителей. В то время как при работе двигателя ток течет к потребителям, при работе генератора он течет от генератора. Составив сеточное уравнение, получаем ток I
«Однофазная эквивалентная электрическая схема синхронного электродвигателя» ). Напряжение сверх синхронного сопротивления обозначается как Us, а напряжение на клеммах — U0. Направление тока указывается в соответствии с системой стрелок для устройств-потребителей. В то время как при работе двигателя ток течет к потребителям, при работе генератора он течет от генератора. Составив сеточное уравнение, получаем ток I
I = U0 — Up / ХS (уравнение 20).
На напряжение на полюсном колесе влияет ток возбуждения. Формулы выводятся ниже. Имеем:
Up = d ФR / dt
При косинусоидальном магнитном потоке ФR и
ФR = B AS
включая его временное дифференцирование, получаем:
Up =ФR ωФS sin(ωФS t)
=BR AS ωФS sin(ωФS t)
=μ HR AS ωФS sin(ωФS t)
Интенсивность создаваемого в роторе магнитного поля описывается законом Ампера. Напряжение на полюсном колесе:
Напряжение на полюсном колесе:
UP = μ(ΘR/2δ) AS ωФS sin(ωФS t)
=Ier(μ N/2δ)AS ωФS sin(ωФS t)
= up sin(ωФS t)
в этом случае будет линейно зависимым от тока возбуждения Ier . Временно изменяемое напряжение на полюсном колесе преобразуется в эффективное по формуле:
UP = up/√2
На базе сеточного уравнения (уравнение 20) можно вывести три рабочих со ия синхронного двигателя в зависимости от напряжения на полюсном колесе (рис. «Рабочее состояние синхронного двигателя» ):
случай 1: UР< U0, недостаточное возбуждение, индуктивное поведение;
случай 2: Up = U0, работа вхолостую;
случай 3: Up > U0, избыточное возбуждение, как конденсатор.
Первый случай имеет место, пока UP<U0. Если Iеr = 0, то в качестве наведенного напряжения принимается лишь самонаводящееся напряжение. Если на ротор подается ток, то действует вызываемая ротором взаимная индукция. Первый случай называется недостаточным возбуждением. Ток отстает от напряжения на 90° (φ(I,U)< 0). Синхронный двигатель демонстрирует индуктивные характеристики.
Дальнейшее повышение тока возбуждения приводит к Up = U0. В результате получаем второй случай (работа вхолостую). Ток I1 становится равен нулю, если через синхронное сопротивление больше не подается напряжение.
Дальнейшее повышение тока возбуждения при UP> U0 приводит к третьему случаю (избыточное возбуждение).
Все три случая относятся к работе двигателя и генератора. Для однофазной эквивалентной электрической схемы напряжение и ток обозначаются стрелками. Кроме того, определяется нагрузочный угол β между напряжениями U0 и Us. Для работы двигателя нагрузочный угол β < 0 (рис. а, «Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ). Треугольник напряжений замыкается напряжением Us.
Для однофазной эквивалентной электрической схемы напряжение и ток обозначаются стрелками. Кроме того, определяется нагрузочный угол β между напряжениями U0 и Us. Для работы двигателя нагрузочный угол β < 0 (рис. а, «Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ). Треугольник напряжений замыкается напряжением Us.
Синхронное сопротивление означает, что протекает ток I1 (опережающий на 90° напряжение Us. Он разбивается на следующие компоненты: активный ток IW и реактивный ток Iв (рис. а, «Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ).
Если напряжение на полюсном колесе уменьшить так, чтобы стрелка реактивного напряжения Us находилась вертикально на стрелке напряжения на клеммах, то двигатель будет лишь потреблять активный ток (рис. Ь,»Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ).
Ь,»Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ).
Дальнейшее снижение напряжения на полюсном колесе приводит к недостаточному возбуждению. Ток I1 отстает от напряжения Us на 90°, что равноценно индуктивным характеристикам двигателя (рис. с, «Рабочие характеристики синхронного двигателя, работающего в режиме двигателя» ).
При приложении к двигателю крутящего момента, он переходит в режим генератора. Работа в режиме генератора отличается положительным нагрузочным углом β (рис. «Рабочие характеристики синхронного двигателя в режиме генератора» ). Знак тока становится отрицательным. Ток опекает от электродвигателя. В случае перевозбуждения электродвигатель ведет себя как конденсатор. Он выдает реактивную мощность (рис. а,»Рабочие характеристики синхронного двигателя в режиме генератора» ).
Если напряжение на полюсном колесе уменьшить так, чтобы стрелка реактивного напряжения Us находилась вертикально на стрелке напряжения на клеммах, то двигатель будет лишь выдавать активный ток (рис. Ь, «Рабочие характеристики синхронного двигателя в режиме генератора» ).
Ь, «Рабочие характеристики синхронного двигателя в режиме генератора» ).
Дальнейшее снижение напряжения на полюсном колесе приводит к недостаточному возбуждению. Электродвигатель ведет себя индуктивно. Он потребляет реактивную мощность (рис. с, «Рабочие характеристики синхронного двигателя в режиме генератора» ).
Электронно-коммутируемые двигатели
В случае с электронно-коммутируемыми двигателями (электронные двигатели), возбуждающая обмотка ротора, в том числе электрический контакт с токоприемными кольцами, не требуются. Электронно-коммутируемые двигатели представляют собой бесщеточные синхронные двигатели, где роторы снабжаются постоянными магнитами. Постоянные магниты могут располагаться, к примеру, на поверхности ротора или внутри него (рис. «Виды роторов для электронных двигателей» ). Коммутация тока происходит в фиксированной обмотке статора с помощью электронного блока (рис. «Активационная электроника электронно-коммутируемого двигателя» ).
«Активационная электроника электронно-коммутируемого двигателя» ).
Частота вращения электроннокоммутируемого двигателя задается частотой окружающего поля статора. Для определения положения ротора требуются датчики. Широко распространены датчики Холла, устанавливаемые в рабочем зазоре для обеспечения цикличного переключения между ветвями обмотки с помощью активационной электроники.
Система трехфазного тока
Техническое значение имеет применение системы трехфазного переменного тока в качестве системы трехфазного тока, основной особенностью которой является то, что сумма всех напряжений и токов всегда равна нулю.
Электрические цепи называются фазами т. Совокупность электрических цепей, в которых напряжения одной частоты оказывают воздействие и имеют фазовый, сдвиг называются многофазными системами. Многофазная система состоит из ветвей обмотки. В многофазной системе может быть п = 3 симметричных систем (рис. «Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
«Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
а = 2π n/m
Задача обмоток — создание вращающегося поля. Асинхронные двигатели имеют такую же конструкцию статора. В воздушном зазоре должно создаваться магнитное поле с постоянной амплитудой, вращающееся с постоянной угловой скоростью. Чтобы создать это поле, временные положения фаз токов должны совпадать с пространственными положениями соответствующих ветвей. У простой симметричной системы (п = 1) с т = 3 три ветви (обозначаемые как U, V и W) и, следовательно, обмотки должны быть равномерно распределены по окружности. На рис. «Обмотка двухполюсного двигателя с одной парой полюсов на каждую ветвь» показано расположение обмотки с тремя ветвями, с одной катушкой на каждую пару полюсов и ветвь. Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
Создание вращающегося поля
Чтобы создать вращающееся поле в случае с простой симметричной системой (п = 1) с количеством ветвей т = 3, ветви должны быть геометрически смещены на электрически эффективный угол:
аеI = 360°·1/3 = 120°.
При одной катушке на каждую пару полюсов и ветвь создаваемое магнитное поле вращается против часовой стрелки, при этом «индикаторная полоска», смещающаяся вправо на рисунке а, «Создание вращающегося поля с одной катушкой на ветвь» (при а = 90°), показывает ток фазы в каждой из ветвей на рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь» в направлении магнитного потока. Расположение образует пару полюсов. Соответствующие магнитные потоки проходят вертикально к плоскости ветвей обмотки (рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Поток ФRes (рис. с, «Создание вращающегося поля с одной катушкой на ветвь»), получаемый из трех ветвей, а также его направление достигаются геометрическим сложением трех отдельных потоков ФU, ФV И ФW.
Продвижение индикаторной полоски на угол а = 180° приводит к реверсированию направления тока в ветви W и, следовательно, к дальнейшему повороту созданного поля ФRes вправо (рис. «Создание вращающегося поля с одной катушкой на ветвь 2»).
При использовании двух катушек на одну ветвь расположение проводников «удваивается». Если обмотка должна образовывать две пары полюсов (р = 2), то обмотки необходимо делить на группы (рис. «Обмотка с двумя парами полюсов на каждую ветвь» ). При этом устанавливается механически эффективный угол:
am = 360° · (1/mp) = 60°.
Электрически эффективный угол остается без изменения. В случае как двухполюсного, так и четырехполюсного расположения поле вращается против часовой стрелки (рис. «Создание вращающегося поля с двумя катушками на ветвь» ). Чаcтоту вращения поля:
nd = fn/p
можно вычислить на основании частоты в линии fn и количества пар полюсов р. При р = 1 частота вращения поля равна частоте в линии (табл. «Частота вращающихся полей» ).
Вместе с количеством пар полюсов можно вычислить межполюсное расстояние:
τp = dsi /2π
как долю окружности статора, где dsi — внутренний диаметр статора. Он соответствует длине синусоидальной полуволны, которая соответствует распределению индукции поля ротора. В случае с двухполюсным двигателем (р = 1), межполюсное расстояние всегда равно aei = 180° (электрический угол) и совпадает с механическим углом am.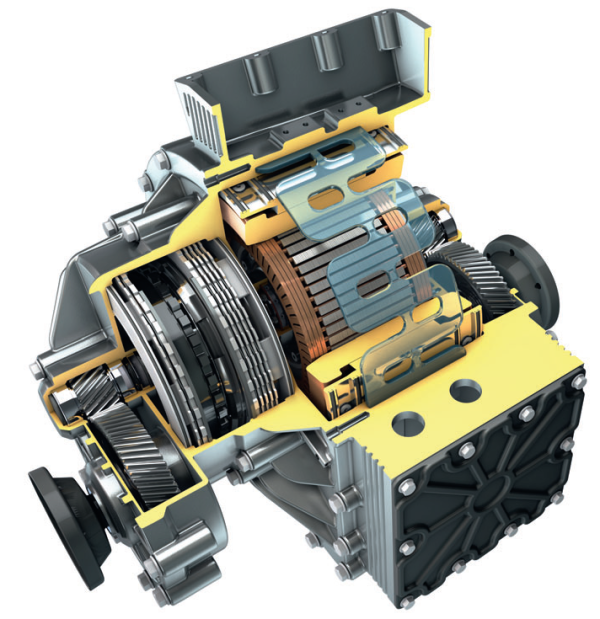 Взаимозависимость этих двух углов показывает угол aei=p—am. Чтобы в обмотках наводилось одинаковое напряжение, ветви обмотки должны быть смещены относительно друг друга на угол aei = 120° или 2τp / 3, а структура и количество катушек должны быть одинаковыми. На каждую ветвь приходится одна треть межполюсного расстояния.
Взаимозависимость этих двух углов показывает угол aei=p—am. Чтобы в обмотках наводилось одинаковое напряжение, ветви обмотки должны быть смещены относительно друг друга на угол aei = 120° или 2τp / 3, а структура и количество катушек должны быть одинаковыми. На каждую ветвь приходится одна треть межполюсного расстояния.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Пример HTML-страницы|
На современном автомобиле установлено большое число агрегатов, требующих для приведения в действие затрат механической энергии. Эту энергию они получают в большинстве случаев от электродвигателей. Электродвигатель с механизмом передачи механической энергии и схемой управления электродвигателем образуют систему электропривода автомобиля. Электроприводы автомобиля приводят в действие вентиляторы отопителей и системы охлаждения двигателя, стеклоподъемники, устройства выдвижения антенн, стеклоочистители, насосы омывателей, фароочистители, подогреватели, топливные насосы и т.п. Расмотрим требования предъявляемые к электродвигателям и типы электрических двигателей используемых в системах электропривода агрегатов автомобиля. Требования, предъявляемые к электродвигателям, весьма разнообразны. В приводах агрегатов автомобиля применяют электродвигатели только постоянного тока. Их номинальные мощности должны соответствовать ряду 6, 10, 16, 25, 40, 60, 90, 120, 150, 180, 250, 370 Вт, а номинальные частоты вращения валов ряду 2000, 3000, 4000, 5000, 6000, 8000, 9000 и 10 000 об/мин. Электродвигатели с электромагнитным возбуждением в системе электропривода агрегатов автомобиля имеют последовательное, параллельное или смешанное возбуждение. Реверсивные электродвигатели снабжены двумя обмотками возбуждения. Однако применение электродвигателей с электромагнитным возбуждением в настоящее время сокращается. Более широко распространены электродвигатели с возбуждением от постоянных магнитов. Конструкции электродвигателей чрезвычайно разнообразны.
На рис. 2 показано устройство электродвигателя отопителя. Постоянные магниты 2 закреплены на корпусе 12 электродвигателя пружинами 10. На электродвигателях мощностью до 100 Вт общим является применение подшипников скольжения с металлокерамическими вкладышами, щеткодержателей коробчатого типа и коллекторов, штампованных из медной ленты с опрессовкой пластмассой. Применяют и коллекторы, изготовленные из трубы, имеющей на внутренней поверхности продольные пазы. Крышки и корпус изготовляют цельнотянутыми из листовой стали. В электродвигателях стеклоомывателей крышки и корпус — пластмассовые. Статор электродвигателей электромагнитного возбуждения набирают из пластин; причем оба полюса и ярмо штампуют как одно целое из листовой стали. Постоянные магниты типов 1 и 2 (см. Технические данные основных типов электродвигателей с возбуждением от постоянных магнитовтаблица 1. Основные типы электродвигателей в электроприводах отечественных автомобилей.
Технические данные основных типов электродвигателей с электромагнитным возбуждениемтаблица 2.
Электродвигатели мощностью более 100 Вт близки по конструкции к генераторам постоянного тока. Они имеют корпус, изготовленный из полосовой малоуглеродистой стали или из трубы, на котором винтами закреплены полюса с обмоткой возбуждения. Крышки стянуты между собой болтами. В крышках расположены шариковые подшипники. Реактивные щеткодержатели обеспечивают стабильную работу щеток на коллекторе. Двухскоростные двигатели с электромагнитным возбуждением имеют выводы каждой катушки возбуждения, электродвигатели с постоянными магнитами оборудованы третьей дополнительной щеткой, при подаче питания на которую частота вращения вала увеличивается. Технические данные основных типов электродвигателей с возбуждением от постоянных магнитов представлены в табл. |


 Вал якоря 11 установлен в металлокерамических подшипниках 1 и 5, расположенных в корпусе и в крышке 8. Крышка крепится к корпусу винтами, ввернутыми в пластины 9. Ток к коллектору 6 подводится через щетки 4, помещенные в щеткодержатель 3. Траверса 7 из изоляционного материала, объединяющая все щеткодержатели в общий узел, прикреплена к крышке 8.
Вал якоря 11 установлен в металлокерамических подшипниках 1 и 5, расположенных в корпусе и в крышке 8. Крышка крепится к корпусу винтами, ввернутыми в пластины 9. Ток к коллектору 6 подводится через щетки 4, помещенные в щеткодержатель 3. Траверса 7 из изоляционного материала, объединяющая все щеткодержатели в общий узел, прикреплена к крышке 8. табл. ниже) устанавливают в магнитопровод, залитый в пластмассовый корпус. Магниты типов 3, 4 и 5 прикрепляют к корпусу плоскими стальными пружинами или приклеивают. Магнит типа 6 устанавливают и приклеивают в магнитопровод, который размещается в крышке электродвигателя. Якорь набирают из пластин электротехнической стали толщиной 1-1,5 мм.
табл. ниже) устанавливают в магнитопровод, залитый в пластмассовый корпус. Магниты типов 3, 4 и 5 прикрепляют к корпусу плоскими стальными пружинами или приклеивают. Магнит типа 6 устанавливают и приклеивают в магнитопровод, который размещается в крышке электродвигателя. Якорь набирают из пластин электротехнической стали толщиной 1-1,5 мм.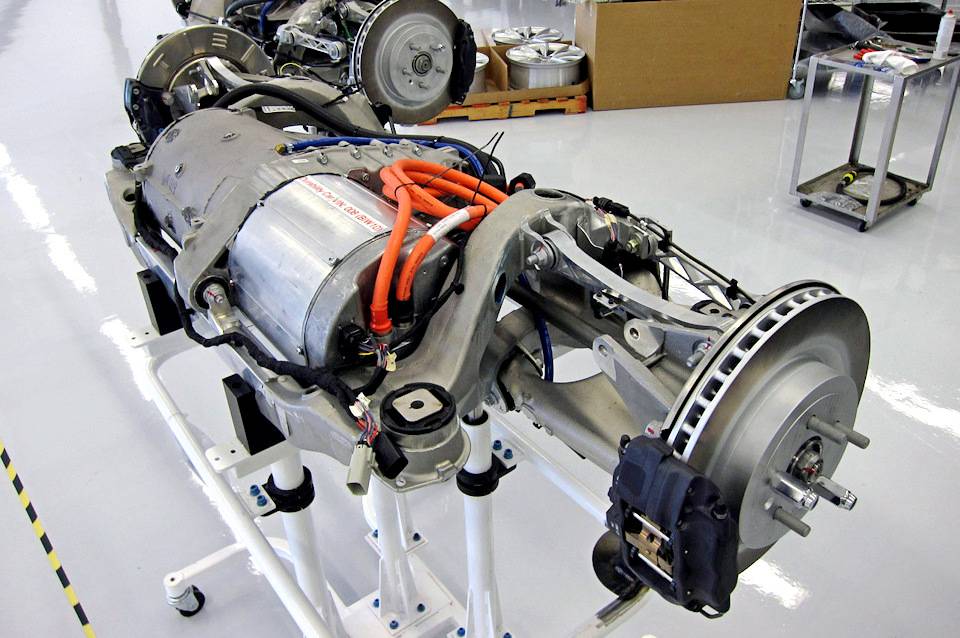 3730
3730 Основные типы электродвигателей в электроприводах отечественных автомобилей.
Основные типы электродвигателей в электроприводах отечественных автомобилей. 3730
3730
Электродвигатели в колесах могут стать будущим электромобилей
Рынки
DOW
S&P 500
NASDAQ
Индекс страха и жадности
—— управляет рынком США
Последние новости рынка
Kit Kat Cereal появится на прилавках магазинов США
FDIC призывает к увеличению лимита страхования депозитов после банкротства банков
Боль Первой Республики во многом была связана с ее зависимостью от богатой клиентуры
Что-то загружается неправильно. Пожалуйста, зайдите позже.
В Lightyear 0, работающем на солнечной энергии, используются встроенные в колеса моторы, разработанные совместно с Elaphe Propulsion Technologies.
Световой годЛондон Си-Эн-Эн Бизнес —
 cms.cnn.com/_components/paragraph/instances/paragraph_B5FAE6BD-30D7-E687-7B2C-E5FFD532A197@published» data-editable=»text» data-component-name=»paragraph»>
В 1900 году Фердинанд Порше и Людвиг Лонер представили электромобиль с моторами на батарейках, прикрепленными к передним колесам. Это было воспринято как сенсация, но технология так и не стала популярной, поскольку бензиновые автомобили достигли мирового господства.
cms.cnn.com/_components/paragraph/instances/paragraph_B5FAE6BD-30D7-E687-7B2C-E5FFD532A197@published» data-editable=»text» data-component-name=»paragraph»>
В 1900 году Фердинанд Порше и Людвиг Лонер представили электромобиль с моторами на батарейках, прикрепленными к передним колесам. Это было воспринято как сенсация, но технология так и не стала популярной, поскольку бензиновые автомобили достигли мирового господства.
Более века спустя моторы в колесах возвращаются. Установленные на ободе колеса электромобиля двигатели повышают эффективность, передавая мощность непосредственно туда, где она больше всего нужна.
«Двигатели в колесах меняют правила игры», — говорит Лука Амброзич, коммерческий директор словенской компании Elaphe Propulsion Technologies, одного из ведущих разработчиков этой технологии. По его словам, они предлагают «полную свободу дизайна», давая производителям автомобилей возможность «создавать более совершенные и умные автомобили».
По его словам, они предлагают «полную свободу дизайна», давая производителям автомобилей возможность «создавать более совершенные и умные автомобили».
Конструкция Elaphe объединяет все части двигателя в стандартной ступице колеса, включая подвеску, тормоза и ротор двигателя.
Элаф Пропульшн ТехнолоджисУпаковав все в колеса, нет необходимости в других компонентах, таких как коробка передач или приводной вал, который обычно передает мощность от бортового двигателя на колеса.
Это делает автомобиль легче, говорит Амброзич CNN Business, и экономит энергию за счет сокращения расстояния, которое должна преодолеть мощность. Это также освобождает место в автомобиле и позволяет производителю сделать автомобиль более аэродинамичным. Он добавляет, что более аэродинамический автомобиль, в свою очередь, требует меньше энергии, что может означать меньшие батареи и более легкие автомобили.
Это также освобождает место в автомобиле и позволяет производителю сделать автомобиль более аэродинамичным. Он добавляет, что более аэродинамический автомобиль, в свою очередь, требует меньше энергии, что может означать меньшие батареи и более легкие автомобили.
Компания Elaphe, основанная в 2006 году Гораздом Лампичем и квантовым физиком Андреем Детелой, разработала двигатели для электромобилей. Lightyear 0, отличающийся изогнутыми солнечными панелями, встроенными в его крышу, оснащен двигателями, разработанными совместно с Elaphe, на каждом колесе. Lightyear говорит, что автомобиль будет запущен в производство в этом году и будет иметь самую эффективную серийную трансмиссию в мире.
Автомобиль Lightyear 0, показанный здесь в рендеринге, начнет производство этой осенью. Помимо зарядки в розетках, он будет получать заряд от солнечных батарей на крыше, капоте и багажнике.
Голландская компания Lightyear сообщает, что автомобиль, показанный на рендере, первоначально будет стоить 250 000 евро (262 000 долларов США).
Bart Geers/LightyearВизуализация салона автомобиля, который сможет проехать около 388 миль без остановки для подзарядки и будет иметь дополнительный запас хода до 44 миль в день от солнечных батарей.
LightyearЕсли производство пойдет по плану, Lightyear 0 станет первым автомобилем на солнечной энергии на рынке, но другие модели находятся в разработке. Sono Sion, производство которого запланировано на 2023 год, будет иметь диапазон 190 миль и обещает обеспечить в среднем 10 миль солнечного диапазона в день, в дополнение к зарядке от розетки.
sono motorsAptera разрабатывает трехколесный автомобиль на солнечных батареях, производство которого планируется начать в 2023 году.
Aptera Солнечными панелями оснащаются не только автомобили. В течение сентября и октября 2021 года автофургон, полностью работающий от солнца, проехал почти 2000 километров (1242 мили) по Европе, не останавливаясь для заправки и не подключаясь к зарядке.
Названный «Stella Vita», он был создан компанией Solar Team Eindhoven 2021, группой из 22 студентов Технологического университета Эйндховена в Нидерландах. В последние годы университет разработал ряд транспортных средств на солнечной энергии, и Lightyear был основан его выпускниками.
STE / Bart van OverbeekeКаждые два года автомобили на солнечных батареях участвуют в гонках World Solar Challenge, и это соревнование вдохновило на создание некоторых инновационных разработок. В прошлом году команда Vattenfall Solar Team, состоящая из студентов Делфтского университета в Нидерландах, заняла третье место в Solar Challenge Марокко с автомобилем на солнечных батареях под названием Nuna 11. У необычного автомобиля три колеса — два справа и одно. слева.
KOEN VAN WEEL/AFP/ANP/AFP via Getty Images World Solar Challenge 2019, изображенный на фото, выиграла группа студентов-инженеров из Бельгии Agoria Solar Team. В июне 2022 года команда заявила, что установила новый мировой рекорд, проехав 1051 километр (653 мили) за 12 часов на автомобиле, полностью работающем от солнца.
Lightyear 0 — первый в мире серийный автомобиль на солнечных батареях
Aptera Motors, еще одна компания, разрабатывающая электромобили на солнечных батареях, привлекла Elaphe к поставке колесных двигателей для своего легкого трехколесного автомобиля, хотя производство еще не началось. А Lordstown Motors использует мотор-колеса Elaphe для своей новой линейки электрических пикапов Endurance, которые, по ее словам, обеспечивают грузовику настоящий полный привод. Коммерческое производство пикапа началось в сентябре.
Эти примеры показывают, что моторы в колесах можно использовать как для легких, так и для тяжелых условий эксплуатации, говорит Амброзик, хотя конструкции должны быть изменены для каждой цели. «Речь идет не о том, чтобы иметь универсальный двигатель, — говорит он.
«Речь идет не о том, чтобы иметь универсальный двигатель, — говорит он.
Но некоторые отраслевые эксперты считают, что моторы в колесах могут иметь ограниченное распространение на основных рынках. Джеймс Эдмондсон, старший технологический аналитик, специализирующийся на электромобилях исследовательской фирмы IDTechEx, отмечает, что большинство крупных производителей автомобилей основывают свои платформы электромобилей на бортовых двигателях. Внедрение технологии в колесах потребует полной переделки системы. «Если вам нужно начинать с нуля и строить свой автомобиль с нуля, это огромные инвестиции», — говорит он.
Все четыре колеса пикапа Lordstown Endurance оснащены технологией Elaphe.
Лордстаун Моторс По словам Эдмондсона, производители также обеспокоены долговечностью и подвеской. Мотор-колеса гораздо больше подвержены непогоде, а также ударам и вибрациям от дороги. Двигатели также утяжеляют колеса, что может снизить комфорт при езде, хотя Эдмондсон отмечает, что это можно компенсировать за счет уменьшения веса в других частях автомобиля.
Мотор-колеса гораздо больше подвержены непогоде, а также ударам и вибрациям от дороги. Двигатели также утяжеляют колеса, что может снизить комфорт при езде, хотя Эдмондсон отмечает, что это можно компенсировать за счет уменьшения веса в других частях автомобиля.
Согласно отчету исследовательской компании Markets and Markets за 2021 год, ожидается, что спрос на колесные двигатели будет расти вместе с ростом продаж электромобилей и к 2026 году достигнет более 4 миллиардов долларов по сравнению с 800 миллионами долларов в 2021 году. .
В отчете отмечается, что по мере того, как электромобили становятся все более популярными, автопроизводители обращают внимание на двигатели в колесах из-за их возможностей экономии места и повышения энергоэффективности.
Еще одним крупным игроком является Protean Electric, которая была приобретена британским производителем электромобилей Bedeo в 2021 году. В этом году компания объявила о новом партнерстве с техническим центром Dongfeng Motor Corporation, китайским государственным производителем автомобилей.
Elaphe также присматривается к Китаю для расширения. К следующему году компания планирует увеличить объем производства до более чем 100 000 колесных двигателей в Словении, а затем запустить производство как в США, так и в Китае.
«Сейчас настало время для коммерческого расширения и расширения производства», — говорит Амброзич. «Мы хотим быть на шаг впереди рынка, чтобы быть готовыми, когда представится возможность».
«Мы хотим быть на шаг впереди рынка, чтобы быть готовыми, когда представится возможность».
Другие материалы CNN Business
Ребекка Новл/AFP/Getty Images
Вскрытие Федеральной резервной системы о недостатках SVB в управлении банком и собственном недосмотре
28 апреля 2023 г.
Джастин Салливан / Getty Images
Первая Республика балансирует на грани — снова
28 апреля 2023 г.
Деловые видео CNN
• Видео
Кори Судзуки/Reuters
Что такое банковское бегство?
28 апреля 2023 г.
• Видео
Верблюжье молоко открывает новые возможности для бизнеса в Кении
28 апреля 2023 г.
• Видео
Состояние техники
28 апреля 2023 г.
• Видео
Генеральный директор Artsy о покупке искусства как актива
28 апреля 2023 г.
Электромобили GEM
Непохожий ни на что другое
Узнайте, что отличает GEM
Уникальный вы
Создайте и оцените свой GEM
Убедитесь сами
Найдите местного дилера
Электромобили GEM
В течение 25 лет электромобили GEM возглавляли революцию низкоскоростных электромобилей. Безопасные, экологичные, стильные и экономичные устройства GEM созданы для того, чтобы соответствовать вашему стилю жизни и продвигать вашу организацию в будущее. Будь то безопасное и стильное вождение ваших детей в школу, предоставление решения для микротранспорта для городских городов, стремящихся сократить расходы и выбросы, или создание бесшумного автопарка для технического обслуживания, чтобы ваша недвижимость выглядела нетронутой, GEM обещает доставить вас туда и предоставить незабываемая поездка по пути.
Наш самый маневренный электромобиль и самая компактная модель.
Места 1-2 | Рекомендуемая производителем розничная цена 13 182 долларов США
Наш самый популярный и универсальный электромобиль.
Места 1-4 | Рекомендуемая производителем розничная цена 15 540 долларов США
Идеальный шаттл для электромобилей — отличная альтернатива внедорожникам или фургонам.
Места 1-6 | Рекомендуемая производителем розничная цена 19 113 долларов США
Соперничайте с любым грузовиком или грузовым фургоном с полезной нагрузкой до 1400 фунтов, тяговым усилием 1250 фунтов и нулевым уровнем выбросов.
Места 1-2 | Рекомендуемая производителем розничная цена 16 731 долл. США
Электромобили, предназначенные для местного транспорта
Что это было!?
Это не гольф-кар. И это не дорожный транспорт. Это электромобиль (EV), разработанный для местных улиц.
И это не дорожный транспорт. Это электромобиль (EV), разработанный для местных улиц.
В отличие от тележек для гольфа, GEM разрешено движение по большинству дорог со скоростью 35 миль/ч (50 км/ч) или меньше, а максимальная скорость составляет 25 миль/ч (40 км/ч). Кроме того, GEM спроектирован так, чтобы превосходить федеральные стандарты безопасности низкоскоростных транспортных средств (LSV).
Воспроизвести видео
0,03 доллара США за милю*
Эксплуатационные расходы
*На основе средней цены на электроэнергию в США
Просто электризуя
Независимо от того, проезжаете ли вы несколько миль или едете целый день, GEM предлагает гибкие варианты аккумулятора и зарядки, чтобы ваш электромобиль был готов к работе, когда вам это нужно. Стандартные зарядные устройства GEM подключаются к стандартным розеткам на 110 В — таким же, как для зарядки смартфона. И, как и в случае со смартфоном, вы можете взять с собой зарядное устройство, чтобы легко заряжать его, находясь вдали от дома. Для тех, у кого мало времени, мы предлагаем два варианта быстрой зарядки.
Для тех, у кого мало времени, мы предлагаем два варианта быстрой зарядки.
Как низкоскоростное транспортное средство (LSV), электромобили GEM соответствуют более высоким стандартам, чем обычные тележки для гольфа. GEM превосходит федеральные стандарты безопасности LSV благодаря нескольким характеристикам, в том числе системе защиты пассажиров (OPS), которая сертифицирована при столкновении с крышей. С максимальной скоростью 25 миль в час GEM способствует созданию более безопасной среды для сосуществования пешеходов и транспортных средств.
Экологичный
GEM — это экологичный электромобиль, который не жертвует качеством, грузоподъемностью или возможностью вместить до шести человек. Без CO 2 выбросов, GEM позволяет городам, сообществам и кампусам достигать своих целей в области устойчивого развития.
Стильный
GEM предлагает отделку премиум-класса, соответствующую вашему стилю, в том числе панорамный люк на крыше, спортивные колеса 16 дюймов, освещение с функцией слабого свечения и сиденья из веган-кожи.