
особенности, преимущества и недостатки моторов
Идея роторного двигателя слишком заманчива: когда и конкурент весьма далек от идеала, кажется, что вот-вот преодолеем недостатки и получим не мотор, а само совершенство… Mazda находилась в плену этих иллюзий аж до 2012 года, когда была снята с производства последняя модель с роторным двигателем — RX-8.
История создания роторного двигателя
Второе имя роторного двигателя (РПД) — ванкель (этакий аналог дизеля). Именно Феликсу Ванкелю сегодня приписываются лавры изобретателя роторно-поршневого двигателя и даже рассказывается трогательная история о том, как Ванкель шел к поставленной цели тогда же, когда Гитлер шел к своей.
На самом деле все было чуточку иначе: талантливый инженер, Феликс Ванкель действительно трудился над разработкой нового, простого двигателя внутреннего сгорания, но это был другой двигатель, основанный на совместном вращении роторов.
После войны Ванкель был привлечен немецкой фирмой NSU, занимавшейся в основном выпуском мотоциклов, в одну из рабочих групп, трудившихся над созданием роторного двигателя под руководством Вальтера Фройде.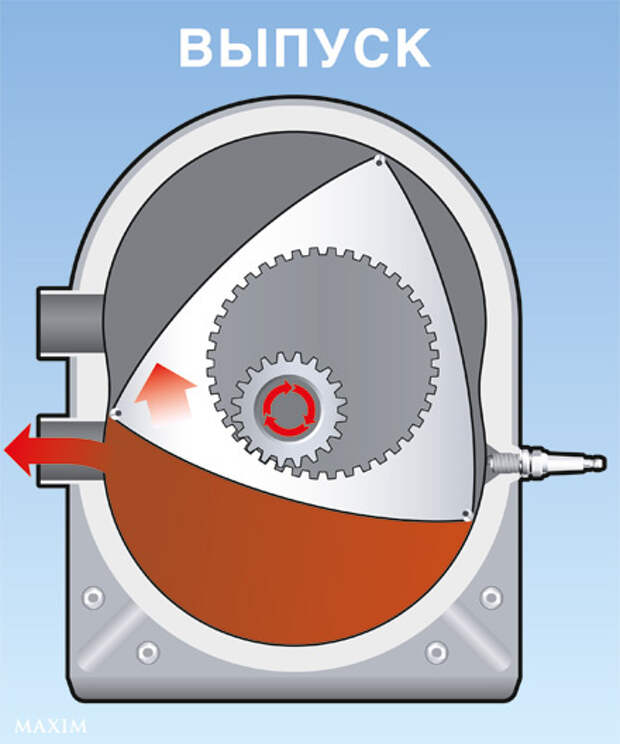
Вклад Ванкеля — это обширные исследования уплотнений вращающихся клапанов. Базовая схема и инженерная концепция принадлежат Фройде. Хотя у Ванкеля был патент на двойственное вращение.
Первый двигатель имел вращающуюся камеру и неподвижный ротор. Неудобство конструкции навело на мысль поменять схему местами.
Первый двигатель с вращающимся ротором начал работу в середине 1958 года. Он мало отличался от своего потомка наших дней — разве что свечи пришлось перенести на корпус.
Феликс Ванкель и его первый роторный двигатель
Вскоре фирма объявила о том, что ей удалось создать новый и очень перспективный двигатель. Почти сотня компаний, занимающихся производством автомобилей, закупила лицензии на выпуск этого мотора. Треть лицензий оказалась в Японии.
РПД в СССР
А вот Советский Союз лицензию не покупал вовсе. Разработки собственного роторного двигателя начались с того, что в Союз привезли и разобрали немецкий автомобиль Ro-80, производство которого NSU начала в 1967 году.
Через семь лет после этого на заводе ВАЗ появилось конструкторское бюро, разрабатывающее исключительно роторно-поршневые двигатели. Его трудами в 1976 году возник двигатель ВАЗ-311. Но первый блин получился комом, и его дорабатывали еще шесть лет.
Первый советский серийный автомобиль с роторным двигателем — это ВАЗ-21018, представленный в 1982 году. К сожалению, уже в опытной партии у всех машин вышли из строя моторы. Дорабатывали еще год, после чего появился ВАЗ-411 и ВАЗ 413, которые были взяты на вооружение силовыми ведомствами СССР. Там не особо переживали за расход топлива и малый ресурс мотора, зато нуждались в быстрых, мощных, но неприметных авто, способных угнаться за иномаркой.
ВАЗ с роторным двигателем (ГАИ)
РПД на Западе
На Западе роторный двигатель не произвел бума, а конец его разработкам в США и Европе положил топливный кризис 1973 года, когда цены на бензин резко взлетели, и покупатели машин стали прицениваться к моделям с экономным расходованием топлива.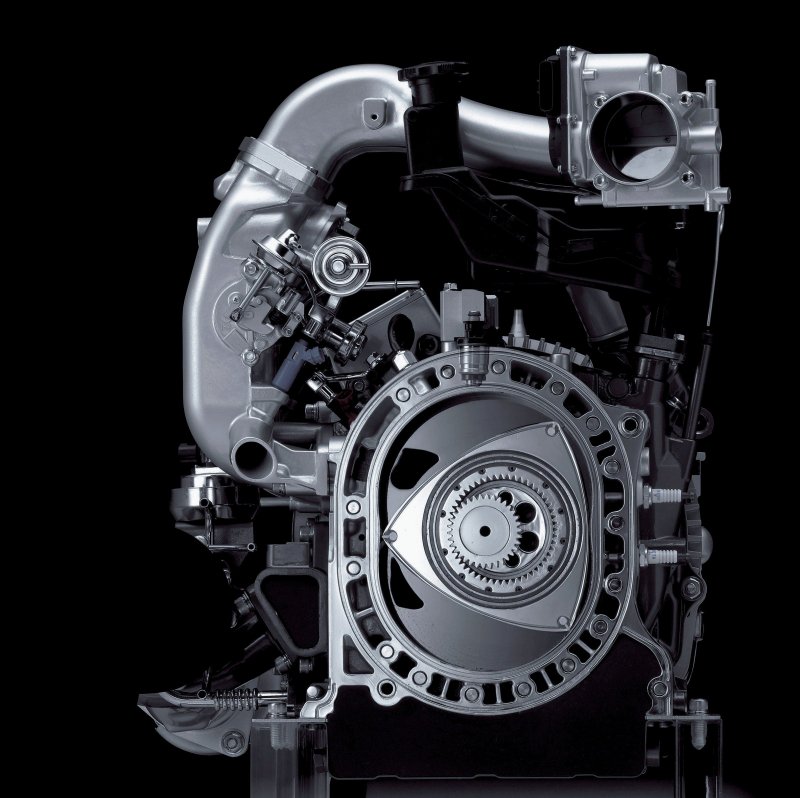
Если учесть, что роторный двигатель съедал до 20 литров бензина на сотню км, продажи его во время кризиса упали до предела.
Единственной страной на Востоке, не утратившей веру, стала Япония. Но и там производители довольно быстро охладели к двигателю, который никак не желал совершенствоваться. И в конце концов там остался один стойкий оловянный солдатик — компания Mazda. В СССР топливный кризис не ощущался. Производство машин с РПД продолжалось и после распада Союза. ВАЗ прекратил заниматься РПД только в 2004 году. Mazda смирилась только в 2012.
Особенности роторного мотора
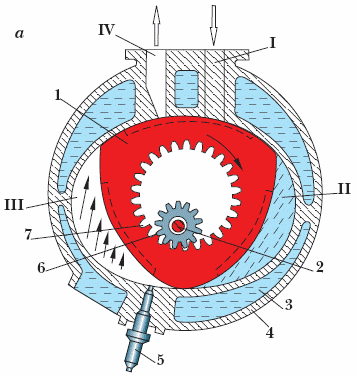
В основу конструкции положен ротор треугольной формы, каждая из граней которого имеет выпуклость (треугольник Рёло). Ротор вращается по планетарному типу вокруг центральной оси — статора. Вершины треугольника при этом описывают сложную кривую, именуемую эпитрохоидой. Форма этой кривой обуславливает форму капсулы, внутри которой вращается ротор.
У роторного мотора те же четыре такта рабочего цикла, что и у его конкурента — поршневого мотора.
Камеры образуются между гранями ротора и стенками капсулы, их форма — переменная серповидная, что является причиной некоторых существенных недостатков конструкции. Для изоляции камер друг от друга используются уплотнители — радиальные и торцевые пластины.
Если сравнивать роторный ДВС с поршневым, то первым бросается в глаза то, что за один оборот ротора рабочий ход происходит три раза, а выходной вал при этом вращается в три раза быстрее, чем сам ротор.
У РПД отсутствует система газораспределения, что весьма упрощает его конструкцию. А высокая удельная мощность при малом размере и весе агрегата являются следствием отсутствия коленвала, шатунов и других сопряжений между камерами.
Достоинства и недостатки роторных двигателей
Преимущества
-
Роторный двигатель хорош тем, что состоит из куда меньшего числа деталей, чем его конкурент — процентов на 35-40.
-
Два двигателя одинаковой мощности — роторный и поршневый — будут сильно отличаться габаритами. Поршневый в два раза больше.
-
Роторный мотор не испытывает большой нагрузки на высоких оборотах даже в том случае, если на низкой передаче разгонять машину до скорости более 100 км/ч.
-
Автомобиль, на котором стоит роторный двигатель, проще уравновесить, что дает повышенную устойчивость машины на дороге.
-
Даже самые легкие из транспортных средств не страдают от вибрации, потому что РПД вибрирует куда меньше, чем «поршневик». Это происходит в силу большей сбалансированности РПД.
Недостатки
-
Главным недостатком роторного двигателя автомобилисты назвали бы его малый ресурс, который является прямым следствием его конструкции.

-
Мотор испытывает перепады температур через каждый такт, что также способствует износу материала. Добавьте к этому давление, которое оказывается на трущиеся поверхности, что лечится только впрыскиванием масла непосредственно в коллектор.
-
Износ уплотнителей становится причиной утечки между камерами, перепады давления между которыми слишком велики. Из-за этого КПД двигателя падает, а вред экологии растет.
-
Серповидная форма камер не способствует полноте сгорания топлива, а скорость вращения ротора и малая длина рабочего хода — причина выталкивания еще слишком горячих, не до конца сгоревших газов на выхлоп. Помимо продуктов сгорания бензина там еще присутствует масло, что в совокупности делает выхлоп весьма токсическим. Поршневый — приносит меньше вреда экологии.

-
Непомерные аппетиты двигателя на бензин уже упоминались, а масло он «жрет» до 1 литр на 1000 км. Причем стоит раз забыть про масло и можно попасть на крупный ремонт, если не замену двигателя.
-
Высокая стоимость — из-за того, что для изготовления мотора нужно высокоточное оборудование и очень качественные материалы.
Как видите, недостатков у роторного двигателя полно, но и поршневый мотор несовершенен, поэтому состязание между ними не прекращалось так долго. Закончилось ли оно навсегда? Время покажет.
Рассказываем как устроен и работает роторный двигатель
принцип работы и наглядное видео
Роторный двигатель (РД) считается двигателем внутреннего сгорания, который практически полностью отличается от привычного поршневого агрегата.
Что касается РД, то он осуществляет все те же такты, при этом они осуществляются в разных частях камеры. Сравнить их можно было бы лишь в том случае, если в поршневом агрегате присутствовал отдельный цилиндр для каждого из тактов и поршень постепенно перемещался бы от цилиндра к цилиндру.
Роторный движок изобрел и сконструировал доктор Феликс Ванкель, поэтому его часто называют двигателем Ванкеля.
Принцип работы
Роторный двигатель использует давление, возникающее во время сгорания топливовоздушной смеси. Такое давление в поршневых двигателях создается в цилиндрах, что привод в движение поршни.
Коленчатый вал и шатуны приводят поршень во вращательное движение и благодаря этому колеса автомобиля начинают вращаться. В данном двигателе, давление при сгорании возникает в камере, которая сформирована частью самого корпуса и закрыта одной из сторон треугольного ротора, выполняющего роль поршней.
В данном видео, вам покажут, как работает роторный двигатель для Mazda RX-8. Приятного просмотра!
Вращения ротора напоминают линию, которая нарисована спирографом. Такая траектория позволяет вершинам ротора контактировать с корпусом движка, что образует при этом три разделенных между собой объема газа.
Когда ротор вращается, эти объемы поочередно расширяются и сжимаются.Именно это обеспечивает поступление в движок топливовоздушной смеси, а также сжатие и выпуск выхлопа. Он обладает системой зажигания и впрыска топлива, которые похожи на используемые системы в поршневых агрегатах.
Его конструкция полностью отличается от поршневого движка. Ротор обладает тремя выпуклыми сторонами, которые исполняют роль поршней. На каждой стороне устройства, присутствует специальное углубление, увеличивающее скорость вращения самого ротора.
Это оставляет для топливовоздушной смеси больше свободного места. На вершине всех граней расположены металлические пластины, которые разделяют все свободное место на камеры. На каждой из сторон ротора присутствуют два кольца из металла, формирующие стенки камер.
На вершине всех граней расположены металлические пластины, которые разделяют все свободное место на камеры. На каждой из сторон ротора присутствуют два кольца из металла, формирующие стенки камер.
В центральной части устройства, находится зубчатое колесо, зубья которого смотрят внутрь. Это колесо сопрягается с шестерней, которая закреплена на корпусе двигателя. Данное сопряжение задает направление и траекторию вращения в корпусе движка.
Особенности роторного двигателя
В данном видео, вам расскажут об истории двигателей, а так же чем они так примечательны.
Корпус двигателя отличается овальной формой.Форма самой камеры сконструирована таким образом, чтобы все вершины ротора контактировали со стеной камеры.
Они образуют три разделенные между собой объемы газа. В корпусе происходит процесс внутреннего сгорания. Свободное пространство корпуса делится на четыре части для впуска, сжатия, рабочего такта и выпуска.
Важно отметить, что порт впуска и выпуска находятся в корпусе. Клапаны в порте отсутствуют. Впускной порт напрямую соединен с дросселем, а выпускной порт – с выхлопной системой.
Выходной вал отличается закругленными выступами-кулачками, которые эксцентрично расположены. С каждым из выступов сопряжен ротор. Выходной вал представляет собой аналог коленчатого вала в поршневом движке.Вращаясь, ротор толкает выступы-кулачки.
Поскольку они расположены несимметрично, ротор давит на них с силой, которая заставляет вращаться выходной вал.
Роторный двигатель собирают слоями.Движок с двумя роторами собирается пятью слоями, которые крепятся длинными болтами, расположенными по кругу.
Через все элементы конструкции проходит охлаждающая жидкость. Два крайних слоя обладают уплотнениями и подшипниками для выходного вала.
Кроме того, они изолируют части корпуса двигателя, в которых находятся роторы. Внутренняя поверхность каждой части является гладкой и это обеспечивает должное уплотнение роторов.
Следует отметить, что впускной порт присутствует в крайних частях. Овальный корпус ротора и выпускной порт расположен в следующем слое. Здесь и установлен ротор.
В центральной части присутствуют впускные порты – для каждого ротора отведен один такой порт.
Роторный движок Mazda RX-8Центральная часть разделяет между собой роторы, именно поэтому ее поверхность внутри является совершенно гладкой.
Достоинства и недостатки
На роторный двигатель в свое время обратило внимание множество ведущих производителей авто.
Благодаря своей конструкции и принципу работы, он обладал весомыми преимуществами перед поршневыми движками. В первую очередь, роторный агрегат отличается лучшей сбалансированностью и подвергается минимальной вибрации.
Помимо этого, такой двигатель отличается превосходными динамическими характеристиками (на низкой передаче автомобиль с таким движком можно без особых усилий разогнать более чем на 100 км/ч при высоких оборотах).
Данный агрегат гораздо легче и компактнее поршневого движка. В данном двигателе используется меньше узлов, и он отличается высокой мощностью по сравнению с поршневым агрегатом.
Среди недостатков роторного движка следует выделить:
- повышенный расход топлива при низких оборотах;
- сложность производства отдельных деталей, которое требует использования дорогостоящего высокоточного оборудования;
- склонность к перегреву из-за особенной формы камеры сгорания;
- износ уплотнителей, которые расположены между форсунками из-за частых перепадов давления;
- потребность в своевременной и частой смене моторного масла (замена должна производиться каждые 5000 километров).
К эксплуатации роторных агрегатов нужно подходить ответственнее, чем к обслуживанию поршневых агрегатов.
Стоянка запрещена знак. Более детальную информацию, ищите на нашем сайте.
Здесь, вы найдёте много картинок с предупреждающими знаками дорожного движения.
При помощи данной статьи, вы сможете ознакомится с рейтингом видеорегистраторов 2015 года.
Их капитальный ремонт и техобслуживание важно проводить вовремя.
Особенность двигателей автомобилей Mazda
Компания Mazda начала производство моделей с роторными движками еще в далеком 1963-ом году.
Наиболее успешным авто компании оснащенным роторным агрегатом стала модель RX-7, выпущенная в 1978-ом году. Правда, до нее было выпущено множество машин, автобусов и грузовиков с роторными двигателями. После модели RX-7, производство которой было остановлено в 1995-ом году, роторным двигателем начали снабжать модель RX-8.
Данный двигатель считался лучшим агрегатом в 2003-ом году. Данный движок с двумя роторами производил 250 лошадиных сил. Однако в 2008-ом году компания прекратила продажу Mazda RX-8 в Европе из-за выбросов ее движка, которые не соответствовали европейским стандартам.
Однако разработчики компании решили на этом не останавливаться и создали современный роторный двигатель Renesis 16X, соответствующий международным и европейским стандартам.
Система впрыска была значительно переработана, благодаря чему топливо расходуется гораздо экономнее.
Помимо этого, корпус движка изготовлен из современного алюминиевого сплава. Компания также выпустила роторный агрегат, который может работать на водороде. Последней разработкой производителя с роторным двигателем на данный момент является модель Premacy Hydrogen RE Hybrid.
Векторное управление электродвигателем «на пальцах» / Блог компании НПФ ВЕКТОР / Хабр
— Что такое векторное управление?— Держать ток под 90 градусов.
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно вот такие вот попытки как-то закрутить двигатель без использования мат.части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
Рассмотрим принцип работы самого простого двигателя переменного тока – синхронной машины с постоянными магнитами. Удобный пример – компас: его магнитная стрелка представляет из себя ротор синхронной машины, а магнитное поле Земли – магнитное поле статора. Без внешней нагрузки (а в компасе её нет, если не считать трение и жидкость, гасящую колебания стрелки) ротор всегда ориентируется по полю статора. Если мы будем держать компас и вращать под ним Землю, то стрелка будет крутиться вслед, совершая работу по перемешиванию жидкости внутри компаса. Но есть и чуть более простой способ – можно взять внешний магнит, например, в виде стержня с полюсами на концах, поле которого значительно сильнее магнитного поля Земли, поднести его к компасу сверху и вращать магнит. Стрелка будет двигаться вслед за вращающимся магнитным полем. В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду. Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Рисунок 1. Принцип действия синхронной электрической машины
Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Давайте нарисуем график момента двигателя в зависимости от углового положения вала ротора и вектора тока Is статора – угловую характеристику синхронного двигателя. Эта зависимость синусоидальная (Рисунок 2).
Рисунок 2. Угловая характеристика синхронной машины (здесь есть некоторая историческая путаница со знаками момента и угла, из-за чего часто рисуют характеристику перевернутой относительно горизонтальной оси).
Чтобы получить этот график на практике, можно поставить на вал ротора датчик вращающего момента, затем включить любой вектор тока, например, просто подать ток в фазу α. Ротор повернется в соответствующее положение, которое нужно принять за ноль. Потом через датчик момента «руками» нужно поворачивать ротор, фиксируя на графике в каждой точке угол θ, на который повернули, и момент, который показал датчик. Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Из этой характеристики следует, что двигатель развивает наибольший момент, когда ротор находится под 90° к вектору тока. Так как мы при создании системы управления на микроконтроллере хотим получить от двигателя наибольший момент при минимуме потерь, а потери, в первую очередь, это ток в обмотках, то рациональнее всего ставить вектор тока всегда под 90° к магнитному полю ротора, т.е. перпендикулярно магниту на рисунке 1. Нужно поменять всё наоборот – не ротор едет к задаваемому нами вектору тока, а мы задаем вектор тока всегда под 90° к ротору, как бы он там не вращался, т.е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах α и β. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение.
Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3).
Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад – некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т.е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад и iβ_зад будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на —ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d и q, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d, q и выходы регуляторов в установившемся режиме постоянны. Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси q, вот так (Рисунок 7):
Рисунок 7. Регулятор скорости для векторного управления
Здесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т.е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т.е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10. Изменение потенциалов фаз для скалярной и векторной ШИМ
Кстати, а какие датчики положения используются для векторного управления? Чаще всего используются четыре типа датчиков. Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Квадратурный энкодер не выдает абсолютного положения ротора – по своим импульсам он позволяет лишь определить, сколько вы проехали, но не куда и откуда (как начало и конец связаны с расположением магнита ротора). Поэтому для векторного управления синхронной машиной сам по себе он не подходит. Немного спасает ситуацию его реперная метка (индекс) – она одна на механический оборот, если до неё доехать, то абсолютное положение становится известно, а от неё можно уже отсчитывать сколько проехали квадратурным сигналом. Но как до этой метки доехать в начале работы? В общем, это не всегда удобно.
Датчик на основе элементов Холла – это грубый датчик. Он выдает всего несколько импульсов на оборот (в зависимости от кол-ва элементов Холла, для трехфазных двигателей их обычно три, т.е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Рисунок 11. Работа датчика положения на элементах Холла для трехфазной машины и экстраполяция его сигнала
Часто для серводвигателей используется сочетание энкодера и датчика Холла. В этом случае можно сделать единый программный модуль их обработки, убирая недостатки обоих: делать экстраполяцию угла, приведенную выше, но не по времени, а по меткам с энкодера. Т.е. внутри от фронта до фронта датчика Холла работает энкодер, а каждый фронт Холла чётко инициализирует текущее абсолютное угловое положение. В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В еще более дорогих применениях используют абсолютный датчик положения с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет не испытывать описанных выше проблем.
Если в электродвигателе очень жарко, а также когда требуется повышенная точность измерения угла, используют «аналоговый» сельсинный датчик (резольвер, вращающийся трансформатор). Это маленькая электрическая машина, используемая как датчик. Представьте, что в рассмотренной нами синхронной машине на рисунке 1 вместо магнитов стоит еще одна катушка, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, то сигнал наведется только в катушку статора фазы α, если вертикально – то только в β, если перевернуть его на 180 – то изменится фаза сигнала, а в промежуточных положениях наводится и туда и сюда по закону синуса/косинуса. Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Есть еще много экзотических датчиков положения, особенно для сверхвысокоточных применений, например, для изготовления электронных чипов. Там в ход идут уже любые физические явления, чтобы только узнать положение наиболее точно. Их рассматривать не будем.
Как вы поняли, векторное управление достаточно требовательное – и датчиков положения ему наставь, и датчиков тока, и ШИМ ему векторную, и микроконтроллер не абы какой, чтобы всю эту математику обсчитывать. Поэтому для простых применений его упрощают. Для начала можно исключить датчик положения, сделав бездатчиковое векторное управление. Для этого используют немного больше математической магии, находящейся в желтом прямоугольнике (Рисунок 12):
Рисунок 12. Структура бездатчикового векторного управления
Наблюдатель – это такой блок, на который подается информация о приложенном к двигателю напряжении (например, из задания на модуль ШИМ) и о токах в двигателе с датчиков. Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т.п.
Есть и другой вариант упрощения. Например, можно сделать так называемую «автокоммутацию». В этом случае для трехфазного двигателя отказываются от сложного метода ШИМ, отказываются от сложной векторной структуры и начинают просто включать фазы двигателя по датчику положения на элементах Холла, даже иногда без всякого токоограничения. Ток в фазах получается не синусоидальный, а трапецеидальный, прямоугольный или еще более искаженный. Но стараются сделать так, чтобы средний вектор тока был всё равно под 90 градусов к «магниту ротора» выбором момента включения фаз. При этом, включая фазу под напряжение, неизвестно, когда же в фазе двигателя нарастет ток. На низкой частоте вращения он это делает быстрее, на высокой, где мешает ЭДС машины, медленнее, еще темп нарастания тока зависит от индуктивности двигателя и т.п. Поэтому, даже включая фазы точно в нужный момент времени, совсем не факт, что средний вектор тока окажется в нужном месте и с нужной фазой – он может как опережать, так и запаздывать относительно оптимальных 90 градусов. Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные. Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
А вот здесь есть курс статей по таким двигателям и аппаратной части системы управления.
Можно пойти даже на еще большее упрощение. Коммутировать обмотки так, чтобы одна фаза всё время оказывалась «свободна» и к ней не прикладывался ШИМ. Тогда в ней можно измерять ЭДС (наведенное в катушке фазы напряжение), и, когда это напряжение переходит через ноль, использовать это как сигнал датчика положения ротора, потому что фаза этого наведенного напряжения зависит как раз от положения ротора. Получается бездатчиковая автокоммутация, что широко используется в различных простеньких приводах, например, в «регуляторах» для пропеллеров авиамоделей. При этом надо помнить, что ЭДС машины появляется только на относительно высокой частоте вращения, поэтому для старта такие системы управления просто не спеша перебирают фазы, надеясь, что ротор двигателя будет следовать за подаваемым током. Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Но иногда делают даже и еще большее упрощение. Можно совсем отказаться от микроконтроллера, ключей, датчиков положения и прочего, осуществляя переключение фаз специальным механическим коммутатором (Рисунок 13):
Рисунок 13. Механический коммутатор для переключения обмоток
При вращении ротор сам переключает свои части обмоток, меняя приложенное к ним напряжение, при этом ток в роторе протекает переменный. Коммутатор располагают таким образом, чтобы магнитный поток ротора и статора снова оказывался близким к 90 градусам, дабы достичь максимума момента. Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Все электрические машины работают схожим образом. В теории электропривода даже существует понятие «обобщенная электрическая машина», к которой сводят работу других. Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых, знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «Анучин А. С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в нашей статье Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье Способы отладки ПО микроконтроллеров в электроприводе. Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Продолжение статьи, где рассказано про асинхронные двигатели здесь.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Фазный ротор электродвигателя
Широкое распространение асинхронного электродвигателя (АД) вызвано его надежностью и простотой конструкции. Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.
Конструкция фазного ротора
Фазный ротор АД конструктивно напоминает его статор. Основа ротора набирается из пластин электростатической стали, которые насаживаются на вал. Конструкция имеет продольные пазы, в которые укладываются витки катушек фазной обмотки. Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
В зависимости от напряжения сети, фазы обмотки соединяются “треугольником” или “звездой”. Оси катушек двухполюсного электродвигателя смещены на 120 градусов относительно друг друга.
Контактные кольца изготавливаются из латуни или стали. На вал они посажены с обязательной изоляцией между собой. Щетки расположены на щеткодержатле, изготовлены из металлографита, к кольцам прижимаются посредством пружин.
Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Отличие короткозамкнутого ротора от фазного
В короткозамкнутом роторе электродвигателя, в отличие от фазного варианта, нет обмоток. Их заменяют замкнутые с торцов между собой кольцами стержни, изготовленные из алюминия или меди. Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название — “беличья клетка”.
Короткозамкнутый ротор приводится во вращение за счет наведения тока магнитным полем статора. Чтобы исключить пульсирование магнитного поля в роторе, стержни “беличьей клетки” располагаются параллельно между собой, но под наклоном относительно оси вращения. АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
Преимущества и недостатки электродвигателя с фазным ротором
Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков:
- Чувствительность к перепадам напряжения;
- Большие габаритные размеры
- Высокая стоимость;;
- Более сложная конструкция за счет цепи ротора с добавочным сопротивлением;
- Меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором).
Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Проверка электродвигателя с фазным ротором
Как известно, электродвигатели с фазным ротором имеют обмотки как на статоре, так и на роторе, что повышает вероятность выхода из строя именно одной из них.
Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке. Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
- Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
Для самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Проблема с роторными двигателями: инженерное объяснение
Мощь в крошечном, простом и легком корпусе. В роторном двигателе Ванкеля есть что любить, но недостаточно, чтобы поддерживать его жизнь. Давайте посмотрим, что пошло не так
Они компактные, мощные и производят потрясающий шум.Так почему же роторные двигатели так и не стали популярными, и почему от этой концепции почти отказался один производитель, который ее поддерживал? Давайте проведем вас через это.
NSU Spider 1964 года стал первым серийным автомобилем в мире, у которого задние колеса плавились под действием роторного двигателя Ванкеля. Автомобильный дебют Ванкеля готовился десятилетиями, хотя срок его службы был относительно коротким и закончился Mazda RX-8 2011 года. Это приводит нас к нескольким вопросам:
- Как работает роторный двигатель?
- Какие преимущества у этого двигателя? (Зачем это сделали?)
- Какие недостатки у двигателя? (Почему он умер?)
1.Как работает роторный двигатель?
Процесс роторного двигателя очень похож на то, что происходит в традиционном поршневом цилиндровом двигателе. Разница в том, что вместо поршней здесь ротор треугольной формы, а вместо цилиндров — корпус, напоминающий овал.
Впуск
По мере того, как ротор перемещается внутри корпуса, маленький воздушный карман расширяется в больший, создавая тем самым вакуум.Этот вакуум поступает во впускные отверстия, из которых воздух и топливо затем всасываются в камеру сгорания.
Сжатие
Ротор продолжает вращаться, сжимая топливно-воздушную смесь относительно плоской стороны корпуса ротора.
1 МБ
Благодарю Итана Смейла за эпический GIF!Мощность
Две свечи зажигания используются для зажигания топливовоздушной смеси, помогая ускорить процесс сгорания и обеспечить сгорание большей части топлива, и это заставляет ротор продолжать вращаться.
Выхлоп
Подобно такту впуска, ротор перемещается до тех пор, пока не станут доступны выпускные отверстия, а затем выхлопные газы под высоким давлением вытесняются наружу, когда ротор закрывается из корпуса.
Важно понимать, что в отличие от поршневого цилиндрового двигателя в одном корпусе ротора все эти события происходят почти одновременно. Это означает, что в то время как всасывание происходит на одной части ротора, также происходит рабочий ход, что приводит к очень плавной подаче мощности и большому количеству мощности в небольшом корпусе.
2. Какие преимущества дает двигатель Ванкеля?
Удельная масса
Одним из самых больших преимуществ роторного двигателя был его размер.Двигатель 13B Mazda RX-7 занимал около одного кубического фута объема, но вырабатывал значительную мощность для своих небольших размеров.
Меньшее количество движущихся частей
Часто в инженерии простейшее решение оказывается одним из лучших. Роторный двигатель резко сокращает количество деталей, необходимых для сгорания, при этом всего три основных компонента вращаются в двухроторном двигателе.
Плавная и высокая частота вращения
Роторный двигатель не имеет возвратно-поступательной массы, как клапаны или поршни в традиционном двигателе.Это приводит к невероятно сбалансированному двигателю с плавной подачей мощности и способности развивать высокие обороты, не беспокоясь о таких вещах, как поплавок клапана.
3. Почему умер роторный двигатель?
Mazda RX-8 2011 года стала последним серийным автомобилем с ротором Ванкеля 1.3-х литровый Ренезис. Независимо от того, соответствовал ли RX-8 названию роторного двигателя, мы все прослезились из-за потери этого инновационного и уникального подхода к внутреннему сгоранию. Что нанесло последний удар? RX-8 не соответствовал нормативам по выбросам Евро 5, и поэтому после 2010 года он больше не мог продаваться в Европе. Несмотря на то, что в штатах он оставался законным, продажи значительно упали, поскольку модель существует с 2004 года.
Какие недостатки у поворотной конструкции?
Всего три основные движущиеся части в двухроторном двигателе ВанкеляНизкий тепловой КПД
Из-за длинной камеры сгорания и уникальной формы тепловой КПД двигателя был относительно ниже по сравнению с поршневыми аналогами.Это также часто приводило к выходу несгоревшего топлива из выхлопных газов (отсюда тенденция роторных двигателей к обратному воспламенению, что, очевидно, столь же круто, сколь и неэффективно).
Ожог ребенка Ожог
Роторный двигатель по своей конструкции сжигает масло. Во впускном коллекторе есть масляные распылители, а также форсунки для распыления масла непосредственно в камеру сгорания. Это не только означает, что водитель должен регулярно проверять уровни масла, чтобы поддерживать надлежащую смазку ротора, но также означает, что из выхлопной трубы выходит больше вредных веществ.А окружающая среда ненавидит плохое.
Через это отверстие в корпусе масло впрыскивается непосредственно во время такта впуска двигателя.Уплотнение ротора
Другая проблема, которая также может повлиять на выбросы: сложно герметизировать ротор, когда он находится в очень разных температурах.Помните, что всасывание и сгорание происходят одновременно, но в очень разных местах корпуса. Это означает, что верхняя часть корпуса относительно холодная, а нижняя часть намного горячее. С точки зрения герметичности это проблематично, поскольку вы пытаетесь создать уплотнение «металл-металл» из металлов, которые работают при существенно разных температурах. Используя рубашки охлаждающей жидкости для выравнивания тепловой нагрузки, эту проблему можно уменьшить, но никогда полностью не устранить.
Выбросы
Если сложить все вместе, выбросы убили ротор. Сочетание неэффективного сгорания, внутреннего сгорания масла и проблем с герметизацией приводит к тому, что двигатель не может конкурировать с сегодняшними стандартами по выбросам или экономии топлива.
Чем отличается RX-8 от конкурентов?
Печально известное верхнее уплотнение ротора RX-7 13BВ моем видео, описывающем недостатки RX-8, зрители справедливо отметили, что я сравнивал автомобили 2015 модельного года с моделью 2011 года с точки зрения экономии топлива, что было несправедливо со стороны Mazda.Давайте исправим эту ошибку, используя RX-8 первого года выпуска.
| Автомобиль | Объем двигателя | Вес | Мощность | MPG Комбинированный рейтинг |
| 2004 Mazda RX-8 | 1.3л Ванкель | 3053 фунтов (1385 кг) | 197-238 л.с. (авто / человек) | 18 миль на галлон (13 л / 100 км) |
| 2004 VW GTI | 1,8 л I4 | 2934 (1330 кг) | 180 л.с. | 9,8 л / 100 км (24 миль на галлон) |
| 2004 Корвет | 5,7 л V8 | 3214 фунтов (1458 кг) | 350 л.с. | 20 миль на галлон (11.8 л / 100 км) |
Как вы можете видеть выше, RX-8 не очень хорош с точки зрения экономии топлива. Corvette со значительно более мощным двигателем, на 47% большей мощностью и на 5% большей массой по-прежнему обеспечивает на 11% большую экономию топлива. Также стоит упомянуть, что это был первый год выпуска модели RX-8, в то время как двигатели Corvette и GTI использовались с предыдущих лет.Проще говоря, о RX-8 нельзя сказать ничего хорошего с точки зрения экономии топлива. Хотя покупатель не обязательно может рассматривать это как отрицательный момент, без учета выбросов нет автомобиля для покупки.
Стоит отметить, что с момента первой публикации этой статьи Mazda объявила, что вернет роторные двигатели, но только в качестве небольших расширителей запаса хода в электромобилях. Другими словами, ничего, что не взорвется.
Объяснение подключения роторного двигателя
Обновлено в июле 2020 г .: После того, как в начале этого года уловили пару различных экстремальных роторных сборок — предложенный Робом Дамом 4-роторный C8 Vette и четырехроторный двигатель FD3S RX-7, похожий на автомобиль F1, — нас осенило, что возможно, некоторые из вас захотят узнать немного больше об одном из способов оптимизации мощности в этих уникальных безпоршневых двигателях.С увеличением доступности корпусов и пластин для вторичного рынка, среди прочего, рынок запасных частей, кажется, готов к всплеску интереса к этой технологии двигателей внутреннего сгорания. Чтобы еще глубже погрузиться в работу порта моста на 700-сильном 13B-REW, обязательно ознакомьтесь с нашей историей сборки TCP Magic FD3S RX-7.
Мы тут немного помешались на роторном двигателе, но чем больше этих вращающихся треугольников мы бросаем в вас, тем больше положительных отзывов мы получаем.На самом деле, я получаю больше писем и сообщений в социальных сетях с вопросами, связанными с ротацией, чем что-либо еще, и мой подписчик в Facebook недавно спросил о переносе, который мы сделали на Renesis 13B в Project RX-8, и в чем именно разница среди уличных портов, мостов и периферийных устройств.
Так как это не единственный вопрос о роторном портировании, который у меня возник в последнее время, и это, по общему признанию, довольно запутанная тема, давайте поближе рассмотрим странный и чудесный мир роторного портирования.Однако имейте в виду, что разные поколения роторных двигателей имеют разные формы впускных и выпускных каналов и общие характеристики воздушного потока, поэтому вы не можете переносить их точно такими же способами или использовать одни и те же шаблоны переноса.
Для начала полезно понять, что портирование относится к модификации как впускных отверстий, которые расположены на боковых корпусах или утюжках, так и выпускных отверстий, которые расположены на алюминиевых корпусах ротора в случае более ранних двигателей 13B и на других моделях. утюги в случае Ренезиса.На самом базовом уровне размещение впускных и выпускных отверстий на роторном двигателе аналогично размещению головки (головок) блока цилиндров на поршневом двигателе, поскольку целью является улучшение потока воздуха в камеры сгорания и из них.
Два наших любимых Rowdy Rotary:
Hert’s FC RX-7
Дэвид Маццеи 1000HP FD RX-7
Поворотное соединение может также иметь эффект, аналогичный замене распредвалов с более высокой подъемной силой и более длительным сроком службы в поршневом двигателе. Это связано с тем, что форма апертуры или отверстия порта управляет синхронизацией порта, что, в свою очередь, определяет, насколько рано и как долго воздушный поток попадает в камеру сгорания и выходит из нее.Внешний край впускного отверстия является стороной открытия, а верхний край — стороной закрытия. Таким образом, если вы перемещаете отверстие порта наружу (изменяя его форму с помощью шлифовального станка, оснащенного различными типами режущих и шлифовальных коронок), вы увеличиваете время открытия впускного отверстия, а расширение порта вверх задерживает время закрытия.
На стороне выпуска: чем ниже вы опускаете нижнюю часть порта, тем быстрее он открывается и тем больше продолжительность. Также обратите внимание, что «перекрытие», или когда и впускное, и выпускное отверстия частично открыты, определяется тем, когда верхушка заднего ротора закрывает выпускное отверстие по сравнению с тем, когда передняя кромка ротора открывает впускной канал.
Фото 8/8 | Мы использовали шаблоны S-портов Racing Beat при перестройке нашего движка Renesis, которые не только дали нам пересмотренные формы открытия портов, которые вы видите здесь, но также включили подробную документацию о том, сколько материала мы можем безопасно удалить из портов.Смотреть фото галерею (8) Фото
С этим основным объяснением роли формы и положения портов, давайте продолжим обсуждение различных типов переноса, которые существуют для этих специальных маленьких двигателей.На умеренном конце спектра «уличного портирования» — основная очистка краев портов, а также некоторые незначительные изменения формы отверстий портов. Хотя вам не обязательно нужны шаблоны для легкой работы порта, если у вас нет опыта в этой области, все же рекомендуется купить несколько шаблонов, чтобы вы не начали удалять материал в неправильной области и на самом деле не повредили воздушный поток или порт. сроки. Или, если вы не любитель DIY, вы всегда можете передать перенос на аутсорсинг авторитетному специалисту по роторным технологиям.
Мы (имеется в виду Джо Фергюсон из RPM Motorsports) использовали шаблоны Racing Beat при портировании нашего движка Renesis.Не менее важны, чем металлические шаблоны, которые показывают вам, как изменить форму отверстий портов, и подробные инструкции, объясняющие, где вы можете безопасно удалить материал внутри портов, потому что последнее, что вам нужно сделать, это прорезать порт и попасть в водную галерею. . С относительно мягким уличным портом, подобным этому, цель состоит в том, чтобы улучшить воздушный поток без каких-либо потерь мощности на низких оборотах или проблем с управляемостью, которые возникают с более экстремальными типами портов, которые мы обсудим в ближайшее время. В результате прирост мощности, как правило, скромный, но не незначительный (10% прирост мощности по сравнению с запасом мощности — довольно распространенная оценка для уличного порта).
Более агрессивный «уличный порт» использует этот же базовый подход немного дальше, расширяя форму портов для увеличения продолжительности. Это, как правило, способствует немного грубому холостому ходу и некоторой потере мощности на более низких оборотах двигателя, но вы действительно получаете еще большую мощность на высоких оборотах, а с роторными двигателями (особенно безнаддувными) все дело в максимуме. Таким образом, уличный переход в агрессивном конце спектра может немного ухудшить управляемость, но он по-прежнему считается хорошим компромиссом между производительностью и управляемостью.
Следующий тип ротационного подключения называется «мостовой порт», который обычно считается первым этапом в портировании. Существует несколько вариантов порта моста, но основная концепция заключается в добавлении нового впускного отверстия или «брови» рядом с основными портами, с «перемычкой» на боковой поверхности корпуса, оставленной между ними для поддержки угловых уплотнений и передний край боковых уплотнений они проходят над этой зоной. Целью порта моста является увеличение продолжительности впуска, что приводит к значительному увеличению максимальной мощности, а также к увеличению пиковой выходной мощности в диапазоне 8000+ оборотов в минуту.Обратной стороной переноса моста является неровный холостой ход, плохая реакция на низких оборотах и повышенный расход топлива, не говоря уже о довольно непристойном выхлопе — вот почему этот тип переноса больше подходит для гоночных автомобилей, чем для уличных автомобилей (хотя, безусловно, есть Множество роторных головок запускают двигатели с переносом моста на улице, точно так же, как есть поршневые головки с большими неровными гоночными кулачками в своих уличных машинах).
Существует множество вариантов порта моста, включая «полумост» и «порт J» или «порт монстра».«Полумост — это когда дополнительный порт для бровей срезан только над вторичным воздухозаборником на боковом корпусе, в то время как основной порт — просто уличный. Это сделано для того, чтобы дать вам лучшее из обоих миров, вроде того, что делает регулируемая фаза газораспределения на поршневом двигателе, за счет того, что меньший первичный порт обеспечивает высокую скорость, но малый объем воздушного потока для лучшего отклика дроссельной заслонки и управляемости на более низких оборотах двигателя, а затем вторичный впускной канал с перемычкой обеспечивает больший объем и более длительный воздушный поток для большой максимальной мощности.
Фото 8/8 | Вот стандартный порт моста с «бровями» над вторичными портами на торцевом корпусе. Брови были бы длиннее и выходили бы за поверхность корпуса ротора в более экстремальных типах портов моста, таких как J-порт или порт Monster.Смотреть фото галерею (8) Фото
Порт J, по сути, является самым дальним из портов моста на стандартных боковых корпусах. Бровь толще и простирается за поверхность ротора в область уплотнительного кольца водяного уплотнения, шаг, который требует обрезки уплотнения и заполнения металлическим герметиком, таким как Devcon.А с так называемым портом-монстром (по сути, наиболее экстремальной версией порта J) бровь намного больше и выходит далеко за пределы трохоидной поверхности корпуса ротора в водную галерею. Это требует, чтобы проход для воды в этой области был перекрыт, а корпус ротора должен быть «совмещен», чтобы открывать всю длину брови. Обратной стороной монстра портирования является то, что он имеет тенденцию сокращать срок службы двигателя, поскольку охлаждение скомпрометировано, но положительным моментом является еще более безумный верх.
Последний и самый экстремальный тип порта роторного двигателя называется периферийным портом. Поскольку невозможно разместить боковые корпуса дальше, чем порт-монстр, подход с периферийным портом фактически заменяет (заполняет) боковые впускные отверстия корпуса и заменяет их большими круглыми портами на корпусах ротора. Это означает, что синхронизация порта больше не определяется передней / задней кромкой роторов, а, скорее, уплотнением вершины, проходящим через большие периферийные отверстия порта.Результатом является экстремальное перекрытие впуска и выпуска, что в значительной степени убивает низкую производительность и управляемость, но гораздо более прямой путь впуска означает, что вы получаете огромную максимальную мощность, которая достигается при 9000 об / мин и выше.
Фото 8/8 | Корпуса периферийных портов Racing Beat — отличный пример того, как преобразовать ваш двигатель 12A или 13B в этот гоночный стиль впуска.Смотреть фото галерею (8) Фото
На самом деле, это не редкость, когда роторы периферийных портов могут вращаться до 10 или 11 000 об / мин и развивают более 300 л.с. в безнаддувном агрегате.И хотя поток охлаждающей жидкости не так скомпрометирован, как у двигателя с монстрами, срок службы двигателя сокращается из-за длительного использования на высоких оборотах, необходимого для его диапазона мощности. Тем не менее, роторы периферийных портов обычно используются только для гонок, поэтому в центре внимания не ожидаемый срок службы двигателя, не безумно громкий звук выхлопа, ужасающий расход топлива или полное отсутствие управляемости на низких оборотах. Другой вариант — полупериферийный порт, в котором боковые воздухозаборники корпуса с уличными отверстиями используются на более низких оборотах, а периферийные порты меньшего размера используются на более высоких оборотах.
Итак, вот он, роторный порт во всех его вариантах — от самых легких уличных портов до самых диких периферийных портов. Что интересно (по крайней мере, для меня) в роторном портировании, так это то, что он не только улучшает воздушный поток так же, как и поршневой двигатель, но и то, как изменение формы портов меняет синхронизацию, как это делают распредвалы поршневого двигателя. Это предложение «два к одному», что делает еще более важным либо использование наиболее проверенных и хорошо задокументированных шаблонов переноса, либо аутсорсинг работы квалифицированному и опытному специалисту по роторным двигателям, таким как Racing Beat или Mazdatrix.
Фото 8/8 | Перенос роторных двигателей — Управление портаСмотреть фото галерею (8) Фото
Разница между статором и ротором (со сравнительной таблицей)
Статор и ротор являются частями электродвигателя. Существенная разница между ротором и статором заключается в том, что ротор является вращающейся частью двигателя, тогда как статор является неподвижной частью двигателя .Другие различия между статором и ротором показаны ниже в сравнительной таблице.
Рама статора , сердечник статора и обмотка статора являются частями статора . Рама поддерживает сердечник статора и защищает их трехфазную обмотку. Сердечник статора несет вращающееся магнитное поле, которое возникает из-за трехфазного питания.
Ротор расположен внутри сердечника статора . Беличья клетка и ротор с фазовой намоткой являются типами ротора.Обмотка ротора возбуждается источником постоянного тока. Обмотка возбуждения создает постоянное магнитное поле в сердечнике ротора.
Содержание: Статор против ротора
- Таблица сравнения
- Определение
- Ключевые отличия
- Заключение
Сравнительная таблица
| Основа для сравнения | Статор | Ротор |
|---|---|---|
| Определение | Это неподвижная часть станка | Это вращающаяся часть двигателя. |
| Детали | Наружная рама, сердечник статора и обмотка статора. | Обмотка ротора и сердечник ротора |
| Питание | Трехфазное питание | Питание постоянного тока |
| Обмотка | Сложная | Легкая |
| Изоляция | Тяжелая | Меньше |
| Потери на трение | Высокие | Низкие |
| Охлаждение | Легко | Сложное |
Определение статора
Статор — это статическая часть двигателя.Основная функция статора — создание вращающегося магнитного поля. Рама статора, сердечник статора и обмотка статора — это три части статора. Сердечник статора поддерживает и защищает трехфазную обмотку статора. Штамповка из высококачественной кремнистой стали составляет сердечник статора.
Определение ротора
Вращающаяся часть двигателя известна как ротор. Сердечник ротора и обмотка ротора являются частью ротора. Обмотка ротора возбуждается источником постоянного тока.Беличья клетка и фазовая намотка — это типы ротора.
Сердечник ротора с короткозамкнутым ротором выполнен из железного цилиндрического сердечника. На внешней поверхности сердечника имеется полукруглая прорезь, на которой размещаются медные или алюминиевые проводники. На концах жилы закорачиваются накоротко с помощью алюминиевых или медных колец.
Работа ротора и статора
Статор создает вращающееся магнитное поле из-за трехфазного питания.Если ротор находится в состоянии покоя, то в них возникает электромагнитная сила из-за явления электромагнитной индукции.
Электромагнитная индукция — это явление, при котором ЭДС индуцируется в проводнике с током из-за переменного магнитного поля. В роторе возникает ток, который заставляет ротор двигаться.
Ключевые различия между статором и ротором
- Статор — это неподвижная часть машины, а ротор — это подвижная часть машины.
- Сердечник статора, обмотка статора и внешняя рама являются тремя частями статора, тогда как сердечник ротора и обмотка возбуждения являются частями ротора.
- Трехфазное питание подается на обмотку статора. Ротор возбуждается источником постоянного тока.
- Обмотка статора более сложная по сравнению с ротором.
- Обмотка статора сильно изолирована, поскольку в ней индуцируется высокое напряжение. А у ротора низкая изоляция.
- Размер обмотки статора велик для пропускания сильного тока по сравнению с обмоткой возбуждения.
- Система охлаждения статора хороша по сравнению с ротором, потому что статор неподвижен.