
Типовые схемы рулевого управления погрузчиков
Категория:
Электропогрузчики
Публикация:
Типовые схемы рулевого управления погрузчиков
Читать далее:
Рулевой механизм погрузчиков
Типовые схемы рулевого управления погрузчиков
В каждом рулевом управлении можно выделить две основные части — рулевой привод и рулевой механизм. В погрузчиках с четырехопорной схемой ходовой части применяется автомобильный тип рулевого управления, он выполняется с рулевой трапецией. В погрузчиках с трехопорной схемой рулевой привод выполнен с поворотным вертикальным валом (электропогрузчик ПТШ-3) или с поворотным стаканом (электропогрузчик 4015).
На изучаемых погрузчиках применяется рулевая трапеция разрезного типа. Такая рулевая трапеция состоит из балки, поворотных кулаков с рычагами, разрезной поперечной тяги и трехплечего рычага. Все эти детали соединяются шарнирно, так что колеса могут поворачиваться вокруг шкворней. Элементы рулевой трапеции подбирают таким образом, что при повороте колесо, находящееся с внутренней стороны поворота, поворачивается на больший угол, чем колесо, находящееся с наружной стороны.
Элементы рулевой трапеции подбирают таким образом, что при повороте колесо, находящееся с внутренней стороны поворота, поворачивается на больший угол, чем колесо, находящееся с наружной стороны.
Рулевой механизм преобразует вращение рулевого колеса в поступательное движение продольной тяги, связанной с трехплечим рычагом рулевого привода.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Балка управляемого моста погрузчика ПТШ-3 устанавливается в вилке вертикального поворотного шкворня. Верхний конец шкворня жестко соединяется с рычагом. Усилие рулевого механизма передается продольной рулевой тяге, а с нее через шкворен и сошку рулевого механизма на управляемую ось.
Рис. 1. Принципиальная схема рулевого управления погрузчика с четырехопорной ходовой частью: 1 — балка управляемого моста, 2 — поворотные кулаки, 3— разрезная поперечная тяга, 4 — рычаг кулака, 5 — продольная тяга, 6 — червяк рулевого механизма, 7 — рулевое колесо, 8 — зубчатый сектор рулевого механизма, 9 — трехплечий рычаг, 10— шкворни
Колесо поворачивается вместе с корпусом главной передачи, который может вращаться в неподвижном корпусе в шариковых радиально-упорных подшипниках. Поворот происходит под воздействием цепи. Она огибает диск на картере и зубчатое колесо рулевого механизма. Зубчатое колесо вращается вертикальным валом, который в свою очередь через пару зубчатых колес получает вращение от рулевого колеса.
Поворот происходит под воздействием цепи. Она огибает диск на картере и зубчатое колесо рулевого механизма. Зубчатое колесо вращается вертикальным валом, который в свою очередь через пару зубчатых колес получает вращение от рулевого колеса.
Рассмотренные схемы рулевого управления обеспечивают поворот управляемых колес под непосредственным воздействием мускульного усилия водителя на рулевое колесо. Уменьшение этого усилия является одной из главных задач конструкторов. Однако инженерные возможности рассмотренных схем в этом отношении практически исчерпаны, так как внедренные конструкции рулевых механизмов и приводов имеют сравнительно высокий к.п.д., но тем не менее затрудняют управления погрузчиками большой грузоподъемности.
Были предприняты попытки решить эту проблему увеличением передаточного отношения рулевого механизма. Например, в рулевом правлении погрузчика ПТШ-3 между рулевым колесом и рулевым механизмом был установлен дополнительный редуктор, снизивший Требуемое усилие на рулевое колесо.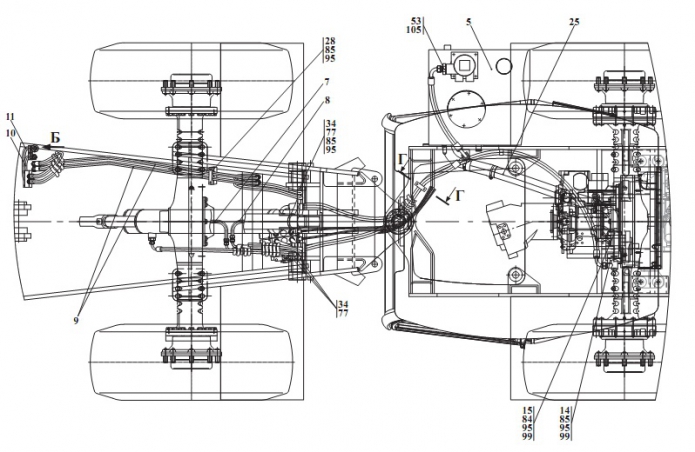 Однако необходимое при этом большое число оборотов рулевого колеса не позволило принять это решение.
Однако необходимое при этом большое число оборотов рулевого колеса не позволило принять это решение.
На электропогрузчиках семейства Ф7 грузоподъемностью 3000 кГ применена машинная схема рулевого управления. Водитель поворотом рулевого колеса воздействует на блок управления специальной гидромеханической системы, которая под воздействием высокого давления рабочей жидкости, создаваемого насосом, приводит в действие гидроусиливающее устройство, связанное с рулевым приводом.
Рис. 2. Принципиальная схема рулевого управления погрузчика ПТШ-З: 1 — продольная рулевая тяга, 2 — балка управляемого моста, 3 — колесо, 4 — рычаг поворотного шкворня, 5 — поворотный шкворень, 6,8 — рулевой механизм, 7 — рулевое колесо
Рис. 3. Принципиальная схема рулевого управления погрузчика 4015: 1 — корпус главной передачи, 2 — колесо, 3 — радиально-упорные подшипники, 4 — цепь, 5,8 — под иипники рулевого механизма, 6, 9 — зубчатые колеса рулевого механизма, 7 — рулевое колесо, 10—вертикальный вал, 11 — зубчатое колесо, 12 — ведомый диск
предназначение, конструктивные особенности и возможные неисправности
Категория: Статьи | Март 17, 2017
Рулевое управление погрузчика – это система управления, предназначенная для смены направления движения данной спецтехники за счет передачи поворотного импульса колесам из кабины оператора.
Система рулевого управления погрузчиком устроена таким образом, что когда водитель вращает рулевое колесо, усилие передается посредством рабочего механизма сошке и ее тяге, которая соединяется с гидроусилительным механизмом.
В свою очередь гидроусилитель, который включает в себя заднеколесная приводная система, понижает усилие, которое требуется для поворота, что повышает маневренность погрузочной техники.
Рулевое управление вилочным погрузчиком спроектировано таким образом, что вне зависимости от условий на дороге, усилие, прилагаемое к рулевому колесу, остается на одном и том же уровне и составляет порядка двух-трех кгс. Через гидроусилитель манипуляции с использованием руля передаются посредством тяги рычагу трапеции рабочего механизма. Эта трапеция в свою очередь соединена с тягой трапеции руля и рычажными элементами поворотных кулачков. Положение, в которое эти кулачки приводит рулевое управление спецтехники, и определяет позицию управляемых колес.
Механизм рулевого управления погрузчика позволяет существенно сократить усилия, которые оператор данного транспорта прикладывает к рулевому колесу. Чтобы поворот такой спецтехники был максимально облегчен, передаточное число для рабочей системы должно быть выше, а чтобы погрузчик был более маневренным, это число должно быть как можно меньшим.
Чтобы поворот такой спецтехники был максимально облегчен, передаточное число для рабочей системы должно быть выше, а чтобы погрузчик был более маневренным, это число должно быть как можно меньшим.
Среди основных разновидностей таких систем можно выделить такие механизмы как:
- винтовые;
- червячные;
- шестеренчатые.
Наиболее распространенным в составе современной погрузочной техники считается червячный механизм, который состоит из трехгребневого роликового элемента на подшипниках (передаточное число 20) и глобоидального червячного элемента.
Среди наиболее распространенных нарушений в работе данной системы стоит в первую очередь отметить проблему установки нейтрального положения руля. В данном случае причина может крыться, как в нарушении соосности между дозаторным насосом и колонкой руля, так и отсутствии либо недостаточности люфта между валом рулевого узла на входе и колонкой.
Еще одной достаточно распространенной проблемой является прокрутка руля, к чему может приводить выход из строя или заклинивание пластинчатых пружин. В данном случае помочь может только их замена. Также причиной может быть сжатие между внешним и внутренним золотниками, что в свою очередь может быть обусловлено загрязнением рабочих механизмов.
В данном случае помочь может только их замена. Также причиной может быть сжатие между внешним и внутренним золотниками, что в свою очередь может быть обусловлено загрязнением рабочих механизмов.
Затруднение поворотного движения руля – еще один случай неисправности рассматриваемой системы. Причин данной поломки существует несколько. Во-первых, это может быть отсутствие шариков в аварийном управлении рулем. Во-вторых, к неполадкам может привести клапанное заедание. Наконец, система может испытывать недостаточность или отсутствие давления, что в большинстве случаев обуславливается выходом из строя гидронасоса, а также его износом и работой в обратном направлении.
Источник: https://www.mixtcar.ru/product_list/zapchasti-pogruzchikov/rulevoe-upravlenie/
Liebherr теперь предлагает рулевое управление с помощью джойстика для колесных погрузчиков
Управляйте моделями погрузчиков от L 526 до L 586 XPower короткими движениями левой руки, рука остается на упоре, левая рука на джойстике, даже при изменении направления, поскольку переключатель на ручка меняет направление движения
9 апреля 2019 г.
Liebherr USA, Co.
На выставке bauma 2019 компания Liebherr представила управление с помощью джойстика в качестве опции для моделей колесных погрузчиков от L 526 до L 586 XPower. Интуитивное управление джойстиком позволяет оператору управлять точно и без усталости, поскольку его положение всегда соответствует текущему углу изгиба колесного погрузчика.
Погрузчики Liebherr XPower с опциональным управлением с помощью джойстика позволяют отказаться от рулевого колеса, что позволяет увеличить пространство в кабине и улучшить обзор. Инновационная система рулевого управления позволяет оператору удобно управлять машиной одной рукой. Это экономит энергию и делает работу менее напряженной, особенно там, где работа связана с многочисленными маневрами рулевого управления, поскольку короткие движения джойстиком эргономичной формы заменяют поворот рулевого колеса. Левая рука удобно лежит на подлокотнике, а поскольку направление движения можно изменить с помощью переключателя на элементе управления, левая рука остается на джойстике даже при изменении направления.
Новая система рулевого управления с джойстиком интуитивно понятна. Одна из причин заключается в том, что положение джойстика всегда соответствует соответствующему углу изгиба колесного погрузчика. Вместе с обратной связью по усилию на джойстике удобное рулевое управление представляет собой альтернативу традиционным системам рулевого управления с помощью джойстика. Эксплуатация безопасна и комфортна даже на высоких скоростях и в труднопроходимой местности.
В дополнение к опции управления с помощью джойстика модели L 566 XPower – L 586 XPower доступны с кабиной оператора без рулевого колеса и рулевой колонки. В этой версии просторная кабина погрузчика предлагает еще больше места для водителя, а также оптимизированный обзор навесного оборудования.
Liebherr xpower Погрузчики включают опцию камеры крыши для вида ковша
Взвешивание на борту.
Автономная компания по производству строительной техники Teleo расширяется, добавляет новые партнерские отношения
Люди меньше ездят.
 Что это может означать для будущей инфраструктуры?
Что это может означать для будущей инфраструктуры?Самая быстрая и точная программа для выполнения земляных работ
InSite Elevation Pro предлагает самое быстрое решение для работы в отрасли, поэтому вы можете претендовать на большее количество рабочих мест с тем же персоналом. После того, как предложение будет выиграно, Elevation Pro предоставит вам инструменты для создания моделей управления машинами с помощью GPS без необходимости использования сложной программы САПР.
Текущий генеральный директор Astec Industries уходит в отставку всего через 3 года
Барри Руффало больше не является президентом, главным исполнительным директором или членом совета директоров, вступает в силу немедленно.
Почему объявление Trimble-Microsoft Azure важно
На выставке Dimensions+ 2022 компания Trimble представляет первый залп инструментов цифровой трансформации, имеющих большое значение для того, как программное и аппаратное обеспечение для строительства будут взаимодействовать друг с другом.
United Rentals приобретает Ahern Rentals
United Rentals приобретет активы Ahern Rentals примерно за 2 миллиарда долларов наличными, поскольку фирма по аренде оборудования надеется расширить свое присутствие в США.
Признание заслуг женщин в строительной отрасли
Национальный центр строительного образования и исследований (NCCER) провел интервью со 176 женщинами-торговцами и проанализировал 770 ответов на опрос, направленный женщинам в отрасли, чтобы нанять, нанять и удержать больше женщин в отрасли.
Новые варианты топлива для экскаваторов снижают затраты и уменьшают выбросы углекислого газа
Независимо от того, любимы они или ненавидимы в отрасли, предложения электрических экскаваторов продолжают быстро развиваться, поскольку производители стремятся резко сократить выбросы.
45 грантов, присужденных для программы восстановления исторических сообществ
28 февраля Министерство транспорта объявило победителей на общую сумму 185 миллионов долларов США в виде грантов, выбранных из проектов воссоединения, представленных по всей стране. Предложения варьировались от полного удаления шоссе, преобразования дороги и установки колпаков или мостов.
Предложения варьировались от полного удаления шоссе, преобразования дороги и установки колпаков или мостов.
Hot Mix Pavement News: март 2023 г.
Обзор последних новостей, бизнес-движений и событий, влияющих на отрасль обслуживания дорожных покрытий.
«Строим лучшие дороги» в центре внимания выставки BOMAG CONEXPO
Благодаря сочетанию новых экологичных машин, интеллектуального оборудования и других передовых технологий компания BOMAG на этой большой выставке сосредоточила свое внимание на строительстве дорог. На их стенде будет представлено более 40 машин.
Электрооборудование, ребрендинг Основные тренды выставки, прогнозируемые на 2023 год CONEXPO
World of Concrete 2023, предложили подрядчикам и дилерам ознакомиться с тенденциями в области оборудования, на которые следует обратить внимание на CONEXPO.
Что нужно знать каждому в асфальтовой промышленности о EPD
Если вы производитель, асфальтоукладчик или даже специалист по техническому обслуживанию, Джозеф Шакат, директор NAPA по устойчивым тротуарам, хочет, чтобы вы были на шаг впереди, когда речь идет об охране окружающей среды. Декларации продуктов.
Декларации продуктов.
SealMaster представит на выставке CONEXP роботизированный герметик для трещин
Среди множества других новых и обновленных продуктов SealMaster может многое показать на выставке. Тем не менее, отмеченный наградами робот-герметик является изюминкой, и его стоит посмотреть на демонстрацию.
Телескопические погрузчики предлагают возможности 3-в-1 для строительных площадок, которым нужны многозадачные герои
Рынок телескопических погрузчиков, вращающихся на 360 градусов, в Северной Америке вырос в геометрической прогрессии. Вот некоторые из лучших функций и вариантов использования телескопических погрузчиков.
3 Важные выводы из Ежегодника NAPA за 2023 год
На ежегодном собрании Национальной ассоциации производителей асфальтовых покрытий в этом году в Майами, штат Флорида, на различных сессиях, комитетах и встречах в ходе пятидневного мероприятия в Саут-Бич были подняты некоторые общие темы.
На выставке CONEXPO
Trimble сосредоточится на решениях по трем основным темам. Ожидается, что подключенные технологии будут играть важную роль на крупной строительной выставке в этом году, поскольку анализ данных и автоматизация продолжают приобретать все большее значение и ценность для подрядчиков всех размеров. Trimble объявляет здесь о своих трех основных направлениях.
Ожидается, что подключенные технологии будут играть важную роль на крупной строительной выставке в этом году, поскольку анализ данных и автоматизация продолжают приобретать все большее значение и ценность для подрядчиков всех размеров. Trimble объявляет здесь о своих трех основных направлениях.
Astec представит новые решения для дорожного строительства на выставке CONEXPO 2023
В преддверии выставки CONEXPO/CON-AGG 2023 компания рассказывает о своих предложениях для подрядчиков.
Конструкция колесного погрузчика и амортизирующего клапана
Колесный погрузчик представляет собой разновидность земляной и каменной строительной машины, широко используемой на автомагистралях, в зданиях, шахтах и других строительных проектах.
1. Конструкция и принцип работы амортизирующего клапана
Гидравлическая система рулевого управления погрузчика сложна, и ее сложно модифицировать. Чтобы решить проблему вибрации рулевого управления, между портами A и B гидростатического блока рулевого управления добавлен пропорциональный электрогидравлический клапан. В этом методе используются гидравлические средства, соединяющие порты A и B для быстрого потребления энергии во время процесса остановки. В реальном рабочем процессе трудно определить колебания давления, трудно управлять электрогидравлическими пропорциональными клапанами, а система рулевого управления не имеет соответствующей системы регистрации и обработки давления. Поэтому был разработан амортизирующий клапан, чтобы решить проблему вибрации упора рулевого управления.
В этом методе используются гидравлические средства, соединяющие порты A и B для быстрого потребления энергии во время процесса остановки. В реальном рабочем процессе трудно определить колебания давления, трудно управлять электрогидравлическими пропорциональными клапанами, а система рулевого управления не имеет соответствующей системы регистрации и обработки давления. Поэтому был разработан амортизирующий клапан, чтобы решить проблему вибрации упора рулевого управления.
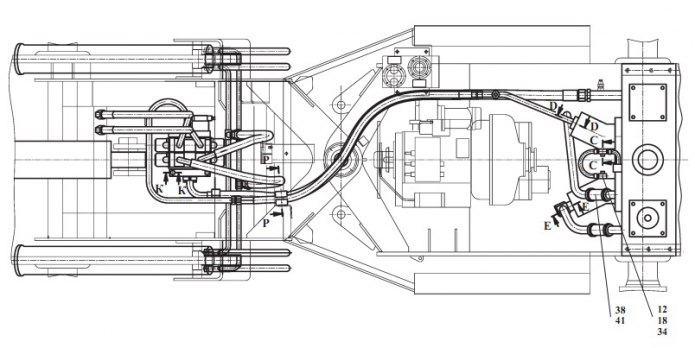
Стратегия управления клапаном подушки: (1) Когда рулевое управление завершено, масло камеры высокого давления направляется на сторону низкого давления через подушку. Подушка поглощает удары давления и эффективно подавляет повторные колебания передней рамы и кабины погрузчика; (2) Когда полость низкого давления гидростатического блока рулевого управления находится под отрицательным давлением, вызванным вибрацией, масло доливается из бака через односторонний клапан; (3) В начале рулевого управления, когда пусковой толчок слишком велик, пусковой толчок будет уменьшен вторичным предохранительным клапаном. Принцип конструкции амортизирующего клапана показан на 9.0113 Рисунок 1 . Порт A(B) амортизирующего клапана соединяется с портом A(B) поворотного клапана, а порт T соединяется с масляным баком. Параметры основных компонентов амортизирующего клапана показаны в Таблице 1 .
Принцип конструкции амортизирующего клапана показан на 9.0113 Рисунок 1 . Порт A(B) амортизирующего клапана соединяется с портом A(B) поворотного клапана, а порт T соединяется с масляным баком. Параметры основных компонентов амортизирующего клапана показаны в Таблице 1 .
Рисунок 1. Устройство и принцип действия клапана подушки: 1 — клапан антивибрационный; 2—обратный клапан; 3—клапан вторичного сброса; 4—блок клапана.
Таблица 1. Параметры основных компонентов амортизирующего клапана.
| Параметр | Значение | Параметр | Значение |
|---|---|---|---|
| Область плунжера | 150 мм 2 | Область седла клапана | 21 мм 2 |
| Жесткость пружины седла клапана | 1,6 Н/мм | Жесткость пружины плунжера | 14,3 Н/мм |
| Преднатяг пружины плунжера | 127,5 с. ш. ш. | Преднатяг пружины седла клапана | 8,7 Н/мм |
| Диаметр демпфирующего отверстия | 0,3 мм |
Конструкция и принцип работы антивибрационного клапана сложны, и его конструкция показана на рис. 2 . Принцип работы следующий: порт А и порт В антивибрационного клапана соответственно соединены с портами А и В рулевого механизма. Масло высокого давления в порту А и масло низкого давления в порту В были использованы в качестве примера для анализа. Масло под давлением поступает в рабочую полость поршня 8 через отверстие в седле клапана 2, шаровой кран 5 и отверстие в плунжере 6. Преодолевая усилие пружин 1 и 7, седло клапана и плунжер перемещаются влево вместе. Когда давление достигает Р S , рулевое управление завершено, и давление падает. Если антивибрационный клапан отсутствует, отдача и колебания будут возникать из-за эффекта накопления энергии гидравлической системой. При P < P S плунжер под действием пружины 7 перемещается вправо, а седло клапана задерживается за счет демпфирующего действия жиклера 3. В это время А соединяется с В, а масло под высоким давлением из A течет в B, в результате чего давление масла в A быстро падает.
Если антивибрационный клапан отсутствует, отдача и колебания будут возникать из-за эффекта накопления энергии гидравлической системой. При P < P S плунжер под действием пружины 7 перемещается вправо, а седло клапана задерживается за счет демпфирующего действия жиклера 3. В это время А соединяется с В, а масло под высоким давлением из A течет в B, в результате чего давление масла в A быстро падает.
Рисунок 2. Принципиальная схема работы виброгасящего клапана: 1—седельная пружина; 2— седло клапана; 3—демпферные отверстия; 4—отверстие в сиденье; 5—шаровой кран; 6—плунжер; 7—пружина плунжера; 8—поршень.
2. Моделирование и испытание прототипа
Чтобы лучше проверить эффект оптимизации буферного клапана на характеристики рулевого управления колесного погрузчика, были проведены следующие испытания моделирования и прототипа. Моделирование и испытание прототипа представляют собой сравнительные испытания исходной системы и системы, оснащенной клапаном подушки безопасности для экстренной остановки рулевого управления и поворотным рулевым колесом.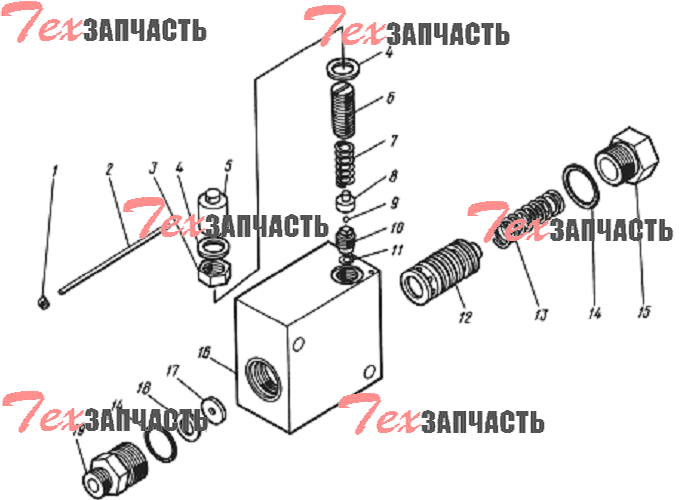
2.1. Эксперимент по моделированию функциональной проверки амортизирующего клапана
Моделирование представляет собой сравнительный тест между исходной системой и системой, оснащенной амортизирующим клапаном для имитации аварийного останова рулевого управления и теста поворотного рулевого колеса. Тест аварийной остановки рулевого управления заключается в повороте рулевого колеса на 120 градусов на максимальной скорости с последующим его отпусканием. Испытание поворотным рулевым колесом относится к испытанию, при котором крутящий момент, приложенный к рулевому колесу, составляет: 0,5 с по часовой стрелке — 0,5 с против часовой стрелки — 0,5 с по часовой стрелке — 0,5 с против часовой стрелки. Результатом является угол поворота погрузчика и давление в портах А и В гидростатического блока рулевого управления. Угол поворота рулевого колеса относится к углу между осью передней рамы и задней рамой погрузчика.
Результат аварийной остановки рулевого управления показан на Рис. 3 . Амортизирующий клапан значительно снижает вибрацию рулевого упора погрузчика. Производительность: Диапазон колебаний давления уменьшен с 50 бар до 30 бар, а количество колебаний давления уменьшено с 6 раз до одного. Когда рулевое управление завершено, передняя рама снижается с 6 раз вибрации до 0, а время вибрации уменьшается с 1,5 с до 0.
3 . Амортизирующий клапан значительно снижает вибрацию рулевого упора погрузчика. Производительность: Диапазон колебаний давления уменьшен с 50 бар до 30 бар, а количество колебаний давления уменьшено с 6 раз до одного. Когда рулевое управление завершено, передняя рама снижается с 6 раз вибрации до 0, а время вибрации уменьшается с 1,5 с до 0.
Рисунок 3. Результат моделирования аварийной остановки рулевого управления: ( a ) давление в цилиндре и кривая угла рамы; ( b ) частичный увеличенный вид угла поворота рулевого колеса.
Результат имитации поворота рулевого колеса показан на рис. 4 . Проанализировав результаты моделирования, можно сделать вывод, что амортизирующий клапан значительно снижает ударную нагрузку при запуске и вибрацию рулевого управления погрузчика. Основное исполнение: стартовое давление удара снижено с 19от 0 до 80 бар, диапазон колебаний давления уменьшен со 130 бар до 30 бар, количество колебаний давления уменьшено с 9 до 2, количество колебаний передней рамы уменьшено с 9 до 1, а время вибрации уменьшено уменьшается с 2,1 с до 0,4 с. В исходной системе по-прежнему наблюдались колебания давления и вибрации кабины в течение 5–6 с, но в оптимизированной системе больше не было колебаний давления и вибрации кабины в течение 5–6 с.
В исходной системе по-прежнему наблюдались колебания давления и вибрации кабины в течение 5–6 с, но в оптимизированной системе больше не было колебаний давления и вибрации кабины в течение 5–6 с.
Рисунок 4. Результат имитации поворота рулевого колеса: ( a ) кривая давления в цилиндре и угла наклона рамы; ( b ) частичный увеличенный вид угла поворота рулевого колеса.
Таким образом, сравнительный тест с моделированием подтверждает, что амортизирующий клапан оказывает значительное улучшающее воздействие на скачки давления при пуске и колебания давления. Амортизирующий клапан можно использовать для оптимизации гидравлической системы рулевого управления колесного погрузчика.
Результат имитации поворота рулевого колеса показан на рис. 4 . Проанализировав результаты моделирования, можно сделать вывод, что амортизирующий клапан значительно снижает ударную нагрузку при запуске и вибрацию рулевого управления погрузчика. Основное исполнение: стартовое давление удара снижено с 19от 0 до 80 бар, диапазон колебаний давления уменьшен со 130 бар до 30 бар, количество колебаний давления уменьшено с 9 до 2, количество колебаний передней рамы уменьшено с 9 до 1, а время вибрации уменьшено уменьшается с 2,1 с до 0,4 с.
Основное исполнение: стартовое давление удара снижено с 19от 0 до 80 бар, диапазон колебаний давления уменьшен со 130 бар до 30 бар, количество колебаний давления уменьшено с 9 до 2, количество колебаний передней рамы уменьшено с 9 до 1, а время вибрации уменьшено уменьшается с 2,1 с до 0,4 с.
Таким образом, сравнительный тест с моделированием подтверждает, что амортизирующий клапан оказывает значительное улучшающее воздействие на скачки давления при пуске и колебания давления. Амортизирующий клапан можно использовать для оптимизации гидравлической системы рулевого управления колесного погрузчика.
2.2. Сравнительный тест прототипа
Для точного анализа воздействия демпферного клапана на систему рулевого управления погрузчика и изучения функции оптимизации вибрации рулевого упора необходимо было установить амортизирующий клапан на систему рулевого управления погрузчика для проведения испытаний прототипа . Тестовым прототипом по-прежнему является 5-тонный погрузчик, использовавшийся в предыдущем испытании, а полигоном для испытаний является ровная асфальтированная дорога. По выраженности вибрации, с одной стороны, субъективно судят о самочувствии водителя; с другой стороны, об этом объективно судят по данным. Поскольку субъективные ощущения водителя не поддаются количественной оценке, в этой статье для оценки эффекта рулевого управления используются давление и ускорение. Поэтому на портах А и В гидроусилителя рулевого управления установлены датчики давления, а в кабине устроен акселерометр для измерения и регистрации поперечного ускорения погрузчика. Место испытания образца транспортного средства и место установки датчика показаны на 9.0113 Рисунок 5 . Тест записывает, обрабатывает и анализирует данные путем синхронного сбора данных о давлениях в портах А и В гидравлического блока рулевого управления и сигналов поперечного ускорения кабины. По результатам наблюдения продемонстрировано влияние буферного клапана на оптимизацию системы рулевого управления погрузчика. То есть, чем больше колебание давления рулевого цилиндра, тем больше амплитуда вибрации рамы погрузчика, и чем больше колебание поперечного ускорения кабины, тем интенсивнее вибрация кабины.
По выраженности вибрации, с одной стороны, субъективно судят о самочувствии водителя; с другой стороны, об этом объективно судят по данным. Поскольку субъективные ощущения водителя не поддаются количественной оценке, в этой статье для оценки эффекта рулевого управления используются давление и ускорение. Поэтому на портах А и В гидроусилителя рулевого управления установлены датчики давления, а в кабине устроен акселерометр для измерения и регистрации поперечного ускорения погрузчика. Место испытания образца транспортного средства и место установки датчика показаны на 9.0113 Рисунок 5 . Тест записывает, обрабатывает и анализирует данные путем синхронного сбора данных о давлениях в портах А и В гидравлического блока рулевого управления и сигналов поперечного ускорения кабины. По результатам наблюдения продемонстрировано влияние буферного клапана на оптимизацию системы рулевого управления погрузчика. То есть, чем больше колебание давления рулевого цилиндра, тем больше амплитуда вибрации рамы погрузчика, и чем больше колебание поперечного ускорения кабины, тем интенсивнее вибрация кабины. И наоборот, небольшие колебания давления и малые ускорения доказывают, что воздействие вибрации невелико и эффект оптимизации очевиден.
И наоборот, небольшие колебания давления и малые ускорения доказывают, что воздействие вибрации невелико и эффект оптимизации очевиден.
Рис. 5. Схема тестового устройства.
Результаты теста показаны на рис. 6 . По сравнению с результатами испытаний оригинального погрузчика системы рулевого управления стартовый толчок давления в начале рулевого управления снижен со 180 бар до 80 бар, а колебания давления после резкой остановки рулевого управления уменьшены вдвое до 0. амплитуда вибрации кабины значительно снижена, а диапазон ускорений уменьшен с 10 м/с 2 до 2 м/с 2 . То есть передняя рама погрузчика перестает трястись после поворота в обратном направлении после того, как прекращается действие рулевого управления. Экспериментально подтверждено, что этот гидравлический метод решил проблему вибрации и всасывания рулевого управления погрузчика. Кроме того, это значительно уменьшило удар при запуске, не влияя на другие операции.
Рис. 6. Результаты проверки аварийного останова рулевого управления.
Чтобы проверить способность амортизирующего клапана поглощать скачки давления, было проведено сравнительное испытание поворотного рулевого колеса. Испытание поворотного рулевого колеса относится к испытанию, при котором крутящий момент, прикладываемый к рулевому колесу, составляет: 0,5 с по часовой стрелке — 0,5 с против часовой стрелки — 0,5 с по часовой стрелке — 0,5 с против часовой стрелки, так что гидравлический блок рулевого управления выполняет несколько тестов «открыть-закрыть-открыть». . Этот тест отличается от теста аварийной остановки тем, что он быстро открывает и закрывает рулевой механизм много раз. Это может сделать невозможным высвобождение энергии нескольких импульсов давления, вызывая сильную вибрацию системы, что может лучше отражать функцию амортизирующего клапана для поглощения скачков давления и его динамические характеристики.
Результаты испытаний поворотного рулевого колеса показаны на рис.
 Недостатками подобной системы являются низкий уровень экологичности двигателя и высокий расход топлива.
Недостатками подобной системы являются низкий уровень экологичности двигателя и высокий расход топлива.

 4 Комбинированный впрыск
4 Комбинированный впрыск
 Ещё один ощутимый недостаток этой технологии – высокие требования к качеству бензина.
Ещё один ощутимый недостаток этой технологии – высокие требования к качеству бензина. Главная проблема таких устройств заключается в повышенном износе, так как насос-форсунки соединены постоянным приводом с распредвалом и никогда не отключаются от него.
Главная проблема таких устройств заключается в повышенном износе, так как насос-форсунки соединены постоянным приводом с распредвалом и никогда не отключаются от него. Не нужно было возиться с ECU для учета новых форсунок (если только вы не использовали дорогую дополнительную систему или автономный ECU). Ваш вариант состоял в том, чтобы купить калиброванный датчик массового расхода воздуха (MAF) для размера форсунки, которую вы использовали.
Не нужно было возиться с ECU для учета новых форсунок (если только вы не использовали дорогую дополнительную систему или автономный ECU). Ваш вариант состоял в том, чтобы купить калиброванный датчик массового расхода воздуха (MAF) для размера форсунки, которую вы использовали. Эти достижения действительно сделали многие из этих первоначальных концепций устаревшими. Здесь мы собираемся погрузиться в некоторые из этих предыдущих проблем и их современные решения.
Эти достижения действительно сделали многие из этих первоначальных концепций устаревшими. Здесь мы собираемся погрузиться в некоторые из этих предыдущих проблем и их современные решения. Тогда типичный путь, вероятно, привел бы нас к форсункам на 42 фунта в час. Кроме того, мы бы получили еще несколько специальных форсунок. Также имейте в виду, что каждая из этих замен форсунок повлекла за собой затраты на повторную калибровку датчика массового расхода воздуха.
Тогда типичный путь, вероятно, привел бы нас к форсункам на 42 фунта в час. Кроме того, мы бы получили еще несколько специальных форсунок. Также имейте в виду, что каждая из этих замен форсунок повлекла за собой затраты на повторную калибровку датчика массового расхода воздуха. «Благодаря достижениям в технологии инжекторов и возможностям настройки ситуация изменилась», — объясняет технический специалист Deatschwerks Дакота Боуман.
«Благодаря достижениям в технологии инжекторов и возможностям настройки ситуация изменилась», — объясняет технический специалист Deatschwerks Дакота Боуман. Это более чем в два раза больше, но он будет отлично работать на холостом ходу и в крейсерском режиме на обоих уровнях на 9-й скорости.Форсунки 0 фунтов/час».
Это более чем в два раза больше, но он будет отлично работать на холостом ходу и в крейсерском режиме на обоих уровнях на 9-й скорости.Форсунки 0 фунтов/час». «Тогда вам понадобятся 78 [фунтов в час], — сказал он нам.
«Тогда вам понадобятся 78 [фунтов в час], — сказал он нам. Это гарантирует отсутствие случайных колебаний из-за неравномерной подачи топлива от форсунки к форсунке, независимо от потребности. Нет ничего более раздражающего, чем машина, дергающаяся во время движения по парковке или пит-лейн, когда все смотрят на вас. Гоночным автомобилям больше не нужно работать жестко или отказываться от управляемости».
Это гарантирует отсутствие случайных колебаний из-за неравномерной подачи топлива от форсунки к форсунке, независимо от потребности. Нет ничего более раздражающего, чем машина, дергающаяся во время движения по парковке или пит-лейн, когда все смотрят на вас. Гоночным автомобилям больше не нужно работать жестко или отказываться от управляемости». Мы следим за тем, чтобы поддерживать один и тот же стандарт от самого маленького инжектора (35 фунтов в час) до самого большого инжектора (215 фунтов в час)», — говорит Боуман. Доказательство очевидно, как вы можете видеть в нашем отчете об испытаниях.
Мы следим за тем, чтобы поддерживать один и тот же стандарт от самого маленького инжектора (35 фунтов в час) до самого большого инжектора (215 фунтов в час)», — говорит Боуман. Доказательство очевидно, как вы можете видеть в нашем отчете об испытаниях. Комплект топливной рампы Aeromotive (P/N: 14102) для 5,0-литрового двигателя за последние два десятилетия практически не изменился, так как все было сделано правильно и работает по сей день. Такая долговечность говорит вам кое-что о продукте на рынке, полном конкуренции.
Комплект топливной рампы Aeromotive (P/N: 14102) для 5,0-литрового двигателя за последние два десятилетия практически не изменился, так как все было сделано правильно и работает по сей день. Такая долговечность говорит вам кое-что о продукте на рынке, полном конкуренции.

 Включенный 8-футовый шланг из нержавеющей стали -6 и 6 футов -8 из нержавеющей стали с оплеткой A1000 оставляет вам достаточно, чтобы немного упс здесь или там, но, как и во всех аспектах жизни, дважды отмерьте и один раз отрежьте.
Включенный 8-футовый шланг из нержавеющей стали -6 и 6 футов -8 из нержавеющей стали с оплеткой A1000 оставляет вам достаточно, чтобы немного упс здесь или там, но, как и во всех аспектах жизни, дважды отмерьте и один раз отрежьте. Теперь, когда он подходит, он будет перепечатан из высокотемпературного материала, так как он прикручен непосредственно к головке блока цилиндров.
Теперь, когда он подходит, он будет перепечатан из высокотемпературного материала, так как он прикручен непосредственно к головке блока цилиндров. Понимание основ того, как работает современная система подачи топлива, не только заставляет вашу звезду сиять немного ярче в глазах ваших клиентов, но и дает ощутимые результаты в ваших ежедневных доходах. С учетом сказанного давайте рассмотрим основы того, как современное топливо 9Системы доставки 0093 работают.
Понимание основ того, как работает современная система подачи топлива, не только заставляет вашу звезду сиять немного ярче в глазах ваших клиентов, но и дает ощутимые результаты в ваших ежедневных доходах. С учетом сказанного давайте рассмотрим основы того, как современное топливо 9Системы доставки 0093 работают.
 Другие проблемы, связанные с защитой от кражи, включают неисправные ключи зажигания или системы обнаружения ключей в замке зажигания.
Другие проблемы, связанные с защитой от кражи, включают неисправные ключи зажигания или системы обнаружения ключей в замке зажигания.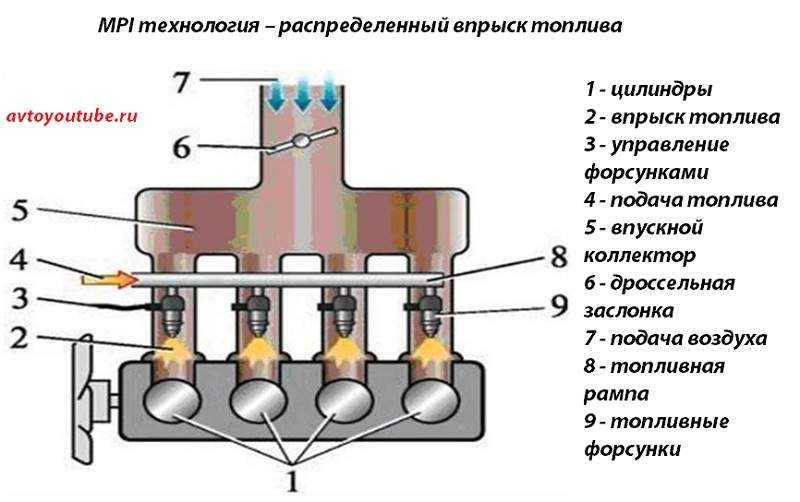
 Эту неисправность можно диагностировать, проверив вакуумную магистраль на наличие жидкого топлива.
Эту неисправность можно диагностировать, проверив вакуумную магистраль на наличие жидкого топлива. Модуль управления трансмиссией (PCM) в системах с импульсной модуляцией обычно снижает давление топлива на низкой скорости и увеличивает давление топлива на высокой скорости. Системам с импульсной модуляцией также требуется сканирующий прибор профессионального уровня для извлечения диагностических кодов неисправностей и проверки системы путем подачи команды топливному насосу на различную частоту импульсов.
Модуль управления трансмиссией (PCM) в системах с импульсной модуляцией обычно снижает давление топлива на низкой скорости и увеличивает давление топлива на высокой скорости. Системам с импульсной модуляцией также требуется сканирующий прибор профессионального уровня для извлечения диагностических кодов неисправностей и проверки системы путем подачи команды топливному насосу на различную частоту импульсов.  Большинство топливных форсунок спроектированы таким образом, чтобы распылять их по схеме, очень похожей на аэрозольный баллончик. Если вокруг сопла топливной форсунки образуются углеродистые отложения, форма распыла становится неравномерной. Это приводит к тому, что часть топлива поступает в цилиндр в жидкой форме, что снижает экономию топлива и производительность.
Большинство топливных форсунок спроектированы таким образом, чтобы распылять их по схеме, очень похожей на аэрозольный баллончик. Если вокруг сопла топливной форсунки образуются углеродистые отложения, форма распыла становится неравномерной. Это приводит к тому, что часть топлива поступает в цилиндр в жидкой форме, что снижает экономию топлива и производительность.

 Об этом рассказала «Московской газете» исполнительный директор Департамента рынка капиталов ИК «ИВА Партнерс» Артем Тузов
Об этом рассказала «Московской газете» исполнительный директор Департамента рынка капиталов ИК «ИВА Партнерс» Артем Тузов Возможно, что для приобретения авто брендов из КНР сложились благоприятные условия, да и цена их была привлекательной, всё это повлияло на увеличение продаж. Также не исключено, что из-за того, что параллельный импорт пока не набрал обороты, поставки автомобилей временно ушедших из страны брендов были затруднены, это могло подтолкнуть часть покупателей обратить свой внимание на китайские автомобили. Дальнейшее увеличение продаж автомобилей из КНР будет зависеть от накопления водителями опыта их эксплуатации и обслуживания в российских условиях, стоимости владения ими. Многое будет зависеть от того, как быстро будет налажен параллельный импорт, какие марки автомобилей и по какой цене можно будет ввозить в страну, а также от действий отечественных автопроизводителей — как скоро они предложат потребителям свои автомобили, в какой комплектации они будут. В стране продолжается эксплуатация авто многих марок, в том числе временно ушедших, ввозят автомобили из других стран, всё это создаёт разнообразие на отечественном рынке.
Возможно, что для приобретения авто брендов из КНР сложились благоприятные условия, да и цена их была привлекательной, всё это повлияло на увеличение продаж. Также не исключено, что из-за того, что параллельный импорт пока не набрал обороты, поставки автомобилей временно ушедших из страны брендов были затруднены, это могло подтолкнуть часть покупателей обратить свой внимание на китайские автомобили. Дальнейшее увеличение продаж автомобилей из КНР будет зависеть от накопления водителями опыта их эксплуатации и обслуживания в российских условиях, стоимости владения ими. Многое будет зависеть от того, как быстро будет налажен параллельный импорт, какие марки автомобилей и по какой цене можно будет ввозить в страну, а также от действий отечественных автопроизводителей — как скоро они предложат потребителям свои автомобили, в какой комплектации они будут. В стране продолжается эксплуатация авто многих марок, в том числе временно ушедших, ввозят автомобили из других стран, всё это создаёт разнообразие на отечественном рынке. В этих условиях дальнейшее увеличение доли китайских машин вряд ли возможно, но они могут укрепить свои позиции», — рассказал «Московской газете» ведущий эксперт УК «Финам Менеджмент» Дмитрий Баранов.
В этих условиях дальнейшее увеличение доли китайских машин вряд ли возможно, но они могут укрепить свои позиции», — рассказал «Московской газете» ведущий эксперт УК «Финам Менеджмент» Дмитрий Баранов. Несмотря на рост популярности китайских машин на рынке, общий объем продаж по итогам 2022 года не превысит 450-500 тыс. авто», — добавили в ГК АвтоСпецЦентр.
Несмотря на рост популярности китайских машин на рынке, общий объем продаж по итогам 2022 года не превысит 450-500 тыс. авто», — добавили в ГК АвтоСпецЦентр. Фактически продажи Haval, Geely, Changan в штуках автомобилей, не выше, чем в прошлом году. Это значит, что 30% рынка которые они заняли за указанную неделю, образовалось за счет очередного сжатия рынка. Новых автомобилей продается все меньше. Зато становится выгодно ввозить подержанные автомобили из стран СНГ, поскольку рубль крепче валют соседей. Такой параллельный импорт помогает насыщать автомобильный рынок РФ, новыми авто», — поделился своим мнением с «Московской газетой» Артем Тузов, исполнительный директор Департамента рынка капиталов ИК «ИВА Партнерс».
Фактически продажи Haval, Geely, Changan в штуках автомобилей, не выше, чем в прошлом году. Это значит, что 30% рынка которые они заняли за указанную неделю, образовалось за счет очередного сжатия рынка. Новых автомобилей продается все меньше. Зато становится выгодно ввозить подержанные автомобили из стран СНГ, поскольку рубль крепче валют соседей. Такой параллельный импорт помогает насыщать автомобильный рынок РФ, новыми авто», — поделился своим мнением с «Московской газетой» Артем Тузов, исполнительный директор Департамента рынка капиталов ИК «ИВА Партнерс». Сколько-нибудь существенную конкуренцию им могут составить корейские бренды, которые по итогам трех кварталов еще сохраняют за собой значительную долю рынка в 21,3%. Но только за счет масштабных продаж первых трех месяцев. По итогам года доля автомобилей из Кореи еще неизбежно снизится, а «китайцы» наверняка подберутся к ним еще ближе», — сказали изданию в пресс-службе «Открытие Авто» (блок автобизнеса банка «Открытие»).
Сколько-нибудь существенную конкуренцию им могут составить корейские бренды, которые по итогам трех кварталов еще сохраняют за собой значительную долю рынка в 21,3%. Но только за счет масштабных продаж первых трех месяцев. По итогам года доля автомобилей из Кореи еще неизбежно снизится, а «китайцы» наверняка подберутся к ним еще ближе», — сказали изданию в пресс-службе «Открытие Авто» (блок автобизнеса банка «Открытие»). Купить китайский автомобиль не всегда плохо, но китайцы славятся клонами и бракованной продукцией. Но кто знает, может быть, в будущем китайский автомобиль станет единственным выбором, который у вас есть.
Купить китайский автомобиль не всегда плохо, но китайцы славятся клонами и бракованной продукцией. Но кто знает, может быть, в будущем китайский автомобиль станет единственным выбором, который у вас есть. Хотя у них есть несколько сомнительных автомобилей, многие из них на самом деле довольно приличные и доступные. Вот какие китайские машины хорошие, а какие хлам.
Хотя у них есть несколько сомнительных автомобилей, многие из них на самом деле довольно приличные и доступные. Вот какие китайские машины хорошие, а какие хлам. Новые модели в США стоят ближе к 20 000 долларов, что означает, что для миллионов людей не может быть и речи о новом автомобиле. Китай принял во внимание трафик и высокую стоимость транспортных средств и выпустил невероятно популярный мини-электромобиль Wuling Hongguang.
Новые модели в США стоят ближе к 20 000 долларов, что означает, что для миллионов людей не может быть и речи о новом автомобиле. Китай принял во внимание трафик и высокую стоимость транспортных средств и выпустил невероятно популярный мини-электромобиль Wuling Hongguang.

 Однако этот автомобиль не является одной из самых дешевых моделей, предлагаемых в Китае; это считается автомобилем премиум-класса и роскошью, стоимость которого составляет около 29 000 долларов. На самом деле многие люди не захотят покупать безымянный автомобиль по этой цене на других рынках, каким бы хорошим он ни был.
Однако этот автомобиль не является одной из самых дешевых моделей, предлагаемых в Китае; это считается автомобилем премиум-класса и роскошью, стоимость которого составляет около 29 000 долларов. На самом деле многие люди не захотят покупать безымянный автомобиль по этой цене на других рынках, каким бы хорошим он ни был.
 R57 — одна из их моделей с высоким воспринимаемым качеством.
R57 — одна из их моделей с высоким воспринимаемым качеством. Это довольно достойная идея для страны, которая известна одним из самых высоких выбросов углерода в мире.
Это довольно достойная идея для страны, которая известна одним из самых высоких выбросов углерода в мире.
 Таким методом производится металлизация пластмассы, которая используется для изготовления аксессуаров для автомобилей, для галантерейных изделий, для изготовления мебельной фурнитуры и сантехнических изделий, для парфюмерно-косметической промышленности и прочее.
Таким методом производится металлизация пластмассы, которая используется для изготовления аксессуаров для автомобилей, для галантерейных изделий, для изготовления мебельной фурнитуры и сантехнических изделий, для парфюмерно-косметической промышленности и прочее. Если вы хотите покрасить эти части экстерьера, вам нужен другой подход. Лучшая аэрозольная краска для автомобильного пластика отличается от наиболее приемлемых продуктов для металлических компонентов.
Если вы хотите покрасить эти части экстерьера, вам нужен другой подход. Лучшая аэрозольная краска для автомобильного пластика отличается от наиболее приемлемых продуктов для металлических компонентов.
 Вот шаги.
Вот шаги.



 Он позволяет создать гладкое ровное покрытие. Кроме того, он быстро сохнет и не требует мытья кистей или удаления капель, которые часто образуются при работе с кистями или валиками.
Он позволяет создать гладкое ровное покрытие. Кроме того, он быстро сохнет и не требует мытья кистей или удаления капель, которые часто образуются при работе с кистями или валиками.
 Как следует из названий продуктов, Prep Cleaner предназначен для очистки перед нанесением краски, а Adhesion Promoter — для обеспечения наилучшего сцепления краски с твердыми пластиками. №
Как следует из названий продуктов, Prep Cleaner предназначен для очистки перед нанесением краски, а Adhesion Promoter — для обеспечения наилучшего сцепления краски с твердыми пластиками. № Вы можете увидеть рассказ о его живописном проекте здесь.
Вы можете увидеть рассказ о его живописном проекте здесь.
 Однако не следует забывать: слишком сильное изменение света задних фонарей может ввести в заблуждение других водителей, стать причиной аварии. Тогда виноватым будет признан владелец тонированных задних фар. Тонировка передней и задней оптики не запрещена.
Однако не следует забывать: слишком сильное изменение света задних фонарей может ввести в заблуждение других водителей, стать причиной аварии. Тогда виноватым будет признан владелец тонированных задних фар. Тонировка передней и задней оптики не запрещена. Нужно заметить, использование пленки более удобно, так как она легко отклеивается, если вдруг со стороны инспекторов ГИБДД возникли претензии относительно цветовой гаммы тонировки. Можно использовать оклейку не на всю плоскость фонаря, а только части, избегая участки, выпускающие свет.
Нужно заметить, использование пленки более удобно, так как она легко отклеивается, если вдруг со стороны инспекторов ГИБДД возникли претензии относительно цветовой гаммы тонировки. Можно использовать оклейку не на всю плоскость фонаря, а только части, избегая участки, выпускающие свет.

 Все действия по тонировке фар будут проведены должным образом, специальными приборами, с соблюдением пожеланий заказчика и учетом требований ГИБДД относительно светопроницаемости фар. Можно не переживать о нарушении и не бояться получить штраф.
Все действия по тонировке фар будут проведены должным образом, специальными приборами, с соблюдением пожеланий заказчика и учетом требований ГИБДД относительно светопроницаемости фар. Можно не переживать о нарушении и не бояться получить штраф. Это необходимо, так как только в случае параллельной тонировки окон и фар, можно добиться завершения полного образа машины с индивидуальным стилем, высокой эстетикой и комфортом эксплуатации.
Это необходимо, так как только в случае параллельной тонировки окон и фар, можно добиться завершения полного образа машины с индивидуальным стилем, высокой эстетикой и комфортом эксплуатации.
 Важно! При тонировке фар мы используем качественную немецкую пленку! Данная плёнка отвечает мировым стандартам и проходит требования ГИБДД без административного штрафа!
Важно! При тонировке фар мы используем качественную немецкую пленку! Данная плёнка отвечает мировым стандартам и проходит требования ГИБДД без административного штрафа! Законно: ваше руководство по штатам. Всегда есть опасения по поводу законности тонировки стекол, и это ничем не отличается, когда речь идет о тонировке фар или задних фонарей.
Законно: ваше руководство по штатам. Всегда есть опасения по поводу законности тонировки стекол, и это ничем не отличается, когда речь идет о тонировке фар или задних фонарей.



 Hampshire
Hampshire


 , автор: windowtintlaws.us0286 Законы Флориды о тонировке — 2022 г. Новые законы о тонировке во Флориде
, автор: windowtintlaws.us0286 Законы Флориды о тонировке — 2022 г. Новые законы о тонировке во Флориде


 Это нормально, если у вас есть немного лишнего оттенка на краях, так как вы всегда можете обрезать его позже, когда пленка будет помещена, чтобы обеспечить идеальное прилегание. Кроме того, вы можете приобрести предварительно нарезанную пленку, чтобы упростить установку.
Это нормально, если у вас есть немного лишнего оттенка на краях, так как вы всегда можете обрезать его позже, когда пленка будет помещена, чтобы обеспечить идеальное прилегание. Кроме того, вы можете приобрести предварительно нарезанную пленку, чтобы упростить установку.


 Распредвал быстро выходит из строя при использовании некачественной смазки с посторонними примесями и мелким мусором. И, конечно, никто не отменял естественный износ детали.
Распредвал быстро выходит из строя при использовании некачественной смазки с посторонними примесями и мелким мусором. И, конечно, никто не отменял естественный износ детали. Повышенные нагрузки вызывают биение, сопровождающееся высокочастотным шумом.
Повышенные нагрузки вызывают биение, сопровождающееся высокочастотным шумом. Последние могут провернуться или полностью разрушиться, заклинив двигатель. Поэтому при подозрении на эту поломку нужно как можно быстрее остановиться и заглушить мотор. До места ремонта придётся добираться на буксире или на платформе эвакуатора.
Последние могут провернуться или полностью разрушиться, заклинив двигатель. Поэтому при подозрении на эту поломку нужно как можно быстрее остановиться и заглушить мотор. До места ремонта придётся добираться на буксире или на платформе эвакуатора. На некоторых моторах она может откручиваться самопроизвольно — нужно периодически проверять плотность её посадки.
На некоторых моторах она может откручиваться самопроизвольно — нужно периодически проверять плотность её посадки. Лучше выделить время и посетить СТО для диагностики мотора — вполне вероятно, что мастер выявит скрытые проблемы. Ремонт на этом этапе потребует меньше времени и денежных затрат.
Лучше выделить время и посетить СТО для диагностики мотора — вполне вероятно, что мастер выявит скрытые проблемы. Ремонт на этом этапе потребует меньше времени и денежных затрат. Он образуется в верхней части двигателя при холодном запуске, и затем при прогреве исчезает. Скорее всего, это стучат гидрокомпенсаторы в головке блоке цилиндров (ГБЦ).
Он образуется в верхней части двигателя при холодном запуске, и затем при прогреве исчезает. Скорее всего, это стучат гидрокомпенсаторы в головке блоке цилиндров (ГБЦ).
 Инструкцию по эксплуатации авто).
Инструкцию по эксплуатации авто).
 Шум является распространенной жалобой клиентов без решения. В то время как симптомы раздражают владельца транспортного средства, шум не влияет на долговечность компонентов двигателя. Лично у меня есть 5,7-литровый двигатель с пробегом 297 тысяч миль, и он столкнулся с детонацией при холодном запуске с самого начала. Шум обычно возникает из-за одного из следующих условий:
Шум является распространенной жалобой клиентов без решения. В то время как симптомы раздражают владельца транспортного средства, шум не влияет на долговечность компонентов двигателя. Лично у меня есть 5,7-литровый двигатель с пробегом 297 тысяч миль, и он столкнулся с детонацией при холодном запуске с самого начала. Шум обычно возникает из-за одного из следующих условий:

 По истечении этого времени шум уменьшается. Шум является результатом конструктивной характеристики, запрограммированной в ECM, чтобы лучше соответствовать выбросам при холодном запуске. Затронутые автомобили включают: 2009 г.-2013 Cadillac Escalade, 2009-2015 Chevrolet Express, Silverado, Suburban, GMC Savana и Sierra со следующими кодами RPO V8: 6.0L-L76, L96, LC8, LY6 и 6.2LL94, L9H.
По истечении этого времени шум уменьшается. Шум является результатом конструктивной характеристики, запрограммированной в ECM, чтобы лучше соответствовать выбросам при холодном запуске. Затронутые автомобили включают: 2009 г.-2013 Cadillac Escalade, 2009-2015 Chevrolet Express, Silverado, Suburban, GMC Savana и Sierra со следующими кодами RPO V8: 6.0L-L76, L96, LC8, LY6 и 6.2LL94, L9H. .. Стук при холодном пуске, гул 201…
.. Стук при холодном пуске, гул 201…

 Они имеют решающее значение для безопасного вождения. Однако со временем они изнашиваются, и вам нужно будет заменить их, прежде чем они повредят лобовое стекло. Не знаю, как это сделать…
Они имеют решающее значение для безопасного вождения. Однако со временем они изнашиваются, и вам нужно будет заменить их, прежде чем они повредят лобовое стекло. Не знаю, как это сделать… На низких скоростях ваш двигатель будет трястись, пока вы не достигнете более высоких скоростей. Чтобы устранить проблему, вам придется заменить опоры двигателя. Чтобы избежать…
На низких скоростях ваш двигатель будет трястись, пока вы не достигнете более высоких скоростей. Чтобы устранить проблему, вам придется заменить опоры двигателя. Чтобы избежать… Я подозреваю, что либо язычок предупреждения об износе тормозных колодок, либо центральный подшипник карданного вала…
Я подозреваю, что либо язычок предупреждения об износе тормозных колодок, либо центральный подшипник карданного вала…
 А вот химический способ, при грамотном применении реактивов, позволит быстро и качественно снять покрытие с любой хромированной пластмассовой поверхности. Но какой из химических препаратов выбрать: кислоту, соду или хлорное железо. Специалисты по тюнингу рекомендуют использовать хлорид железа.
А вот химический способ, при грамотном применении реактивов, позволит быстро и качественно снять покрытие с любой хромированной пластмассовой поверхности. Но какой из химических препаратов выбрать: кислоту, соду или хлорное железо. Специалисты по тюнингу рекомендуют использовать хлорид железа.
 Металлическую тару лучше не использовать. Препарат начнет вступать реакцию с материалом емкости — химическая активность подготовленного раствора уменьшится.
Металлическую тару лучше не использовать. Препарат начнет вступать реакцию с материалом емкости — химическая активность подготовленного раствора уменьшится.
 Однако по мере эксплуатации происходит физический износ хромированного покрытия, из-за чего оно теряет свою эстетичность, поэтому многие люди задумываются над тем, как снять хром с пластика в домашних условиях. На сегодняшний день существует несколько основных способов сделать это, каждый из которых предполагает использование определенного оборудования, специальных растворов или других подручных средств. Независимо от того, какой способ удаления хромированного напыления вы выберете, необходимо соблюдать определенные правила и меры предосторожности.
Однако по мере эксплуатации происходит физический износ хромированного покрытия, из-за чего оно теряет свою эстетичность, поэтому многие люди задумываются над тем, как снять хром с пластика в домашних условиях. На сегодняшний день существует несколько основных способов сделать это, каждый из которых предполагает использование определенного оборудования, специальных растворов или других подручных средств. Независимо от того, какой способ удаления хромированного напыления вы выберете, необходимо соблюдать определенные правила и меры предосторожности.

 В качестве катодов используют стальные пластины. Опасно присутствие в растворе хлоридов, способных вызвать растравливание и потемнение стали [9]. При использовании раствора №2 хромовые покрытия растворяются более равномерно. Электрохимический способ рекомендуют применять при снятии толстых хромовых покрытий со стальных деталей (особенно с высокопрочных сталей и чугунных поршневых колец). При необходимости удаления хромового покрытия вместе с подслоем никеля рекомендуется анодное растворение в 80%-ном растворе серной кислоты при плотности тока 3-5 А/дм2 . Снятие хрома со стальных и с алюминиевых деталей может быть также осуществлено при анодном травлении в отработанном электролите хромирования при 15-20 А/дм2 [6]. Образующаяся при этом на поверхности алюминия оксидная пленка удаляется зачисткой наждачным полотном или растворением в щелочи [29]. Химический способ заключается в растворении покрытия в 5 — 20 %-ном растворе соляной кислоты при 20-35°С. Чаще всего этот метод применяют для удаления покрытий с меди, латуни, никеля.
В качестве катодов используют стальные пластины. Опасно присутствие в растворе хлоридов, способных вызвать растравливание и потемнение стали [9]. При использовании раствора №2 хромовые покрытия растворяются более равномерно. Электрохимический способ рекомендуют применять при снятии толстых хромовых покрытий со стальных деталей (особенно с высокопрочных сталей и чугунных поршневых колец). При необходимости удаления хромового покрытия вместе с подслоем никеля рекомендуется анодное растворение в 80%-ном растворе серной кислоты при плотности тока 3-5 А/дм2 . Снятие хрома со стальных и с алюминиевых деталей может быть также осуществлено при анодном травлении в отработанном электролите хромирования при 15-20 А/дм2 [6]. Образующаяся при этом на поверхности алюминия оксидная пленка удаляется зачисткой наждачным полотном или растворением в щелочи [29]. Химический способ заключается в растворении покрытия в 5 — 20 %-ном растворе соляной кислоты при 20-35°С. Чаще всего этот метод применяют для удаления покрытий с меди, латуни, никеля. При удалении хрома со стали химическим способом в соляную кислоту необходимо вводить ингибиторы, так как возможно неравномерное растравливание и наводораживание основы. Скорость растворения хрома в растворе соляной кислоты в зависимости от ее концентрации и температуры колеблется в пределах 100-200 мкм/ч. После удаления хрома с деталей из высокопрочных сталей и чугунных поршневых колец перед повторным хромированием необходимо проводить их обезводораживание в течение 2-2,5 часов при 200-250°С [6]. Для удаления покрытий с цинкового литья рекомендуется раствор, содержащий 30 г/л сульфида натрия (Na2S) и 20 г/л едкого натра (NaOH). Температура 20-25°С, анодная плотность тока 2-3 А/дм2.
При удалении хрома со стали химическим способом в соляную кислоту необходимо вводить ингибиторы, так как возможно неравномерное растравливание и наводораживание основы. Скорость растворения хрома в растворе соляной кислоты в зависимости от ее концентрации и температуры колеблется в пределах 100-200 мкм/ч. После удаления хрома с деталей из высокопрочных сталей и чугунных поршневых колец перед повторным хромированием необходимо проводить их обезводораживание в течение 2-2,5 часов при 200-250°С [6]. Для удаления покрытий с цинкового литья рекомендуется раствор, содержащий 30 г/л сульфида натрия (Na2S) и 20 г/л едкого натра (NaOH). Температура 20-25°С, анодная плотность тока 2-3 А/дм2. Однако при работе с такими средствами необходимо быть предельно осторожными и соблюдать все меры безопасности, поскольку они являются очень токсичными.
Однако при работе с такими средствами необходимо быть предельно осторожными и соблюдать все меры безопасности, поскольку они являются очень токсичными. Аналогичным образом, описанным выше. Однако здесь есть один немаловажный нюанс. При работе с этим веществом следует исключать его контакт с водой и алюминием, поскольку, вступая с ними в реакцию, гидроксид натрия выделяет токсичный и огнеопасный газ.
Аналогичным образом, описанным выше. Однако здесь есть один немаловажный нюанс. При работе с этим веществом следует исключать его контакт с водой и алюминием, поскольку, вступая с ними в реакцию, гидроксид натрия выделяет токсичный и огнеопасный газ. Совершенно необходимо учитывать силу тока , изменение состава ванны в процессе её использования и проч. Подробности следует искать в специальных руководствах по никелированию . Мы даем только самые упрощенные рецепты для некоторых случаев никелирования . 1.Гальваническое никелирование алюминиевых предметов. Сперва метал погружением в кипящий раствор едкого натра очищается от всей грязи , натирается известковым молоком ,затем погружается на несколько минут в 0,2% раствор цианистого калия и , наконец , опускается в ванну , состоящую из 500 г. воды 500 г соляной кислоты и 1 г железа , и оставляется в ней , пока металл не приобретет вида муара . Между каждой из этих работ металлический предмет промывается в нескольких водах . После такой подготовки металлическая поверхность подвергается действию эл.тока и покрывается никелевым слоем при помощи раствора хлористого никеля . Никелированный таким способом алюминий не меняется от сырого воздуха , выдерживает холод и жар и противодействует действию раствора едкого калия , соляной и уксусной кислот .
Совершенно необходимо учитывать силу тока , изменение состава ванны в процессе её использования и проч. Подробности следует искать в специальных руководствах по никелированию . Мы даем только самые упрощенные рецепты для некоторых случаев никелирования . 1.Гальваническое никелирование алюминиевых предметов. Сперва метал погружением в кипящий раствор едкого натра очищается от всей грязи , натирается известковым молоком ,затем погружается на несколько минут в 0,2% раствор цианистого калия и , наконец , опускается в ванну , состоящую из 500 г. воды 500 г соляной кислоты и 1 г железа , и оставляется в ней , пока металл не приобретет вида муара . Между каждой из этих работ металлический предмет промывается в нескольких водах . После такой подготовки металлическая поверхность подвергается действию эл.тока и покрывается никелевым слоем при помощи раствора хлористого никеля . Никелированный таким способом алюминий не меняется от сырого воздуха , выдерживает холод и жар и противодействует действию раствора едкого калия , соляной и уксусной кислот . 2.Никелирование железа и стали. Помимо гальванического способа , можно пользоваться еще следующим , весьма несложным способом для покрытия полированной стали или железа тонким , но весьма прочным , слоем никеля . Берут 10 % раствор чистого хлористого цинка и постепенно прибавляют к раствору сернокислого никеля , пока жидкость не окрасится в ярко-зеленый цвет , затем её медленно нагревают до кипения , всего лучше в фарфоровом сосуде , могущая при этом появиться муть не оказывает никакого влияния на никелирование , которое производится следующим образом : когда вышеупомянутая жидкость будет доведена до кипения , в неё опускают предмет , причем последний должен быть тщательно очищен и предварительно обезжирен . Предмет кипятят в растворе около часа , подливая время от времени дистиллированной воды по мере её выпаривания . Если во время кипения будет замечено , что цвет жидкости вместо ярко-зеленого стал слабозеленым , то прибавляют понемногу сернокислого никеля , до получения первоначального цвета .
2.Никелирование железа и стали. Помимо гальванического способа , можно пользоваться еще следующим , весьма несложным способом для покрытия полированной стали или железа тонким , но весьма прочным , слоем никеля . Берут 10 % раствор чистого хлористого цинка и постепенно прибавляют к раствору сернокислого никеля , пока жидкость не окрасится в ярко-зеленый цвет , затем её медленно нагревают до кипения , всего лучше в фарфоровом сосуде , могущая при этом появиться муть не оказывает никакого влияния на никелирование , которое производится следующим образом : когда вышеупомянутая жидкость будет доведена до кипения , в неё опускают предмет , причем последний должен быть тщательно очищен и предварительно обезжирен . Предмет кипятят в растворе около часа , подливая время от времени дистиллированной воды по мере её выпаривания . Если во время кипения будет замечено , что цвет жидкости вместо ярко-зеленого стал слабозеленым , то прибавляют понемногу сернокислого никеля , до получения первоначального цвета . По истечении означенного времени предмет вынимают из раствора , промывают в воде , в которой распущено самое небольшое количество мела , и затем тщательно просушивают . Полированное железо и сталь , покрытые указанным способом никелем , весьма прочно держат это покрытие . 3.Жидкость для никелирования. В 1,5 литра горячей воды растворяют 250 г никелевого купороса 181 г нейтрального виннокислого аммония и 2,5 г растворенной в эфире дубильной кислоты , фильтруют раствор и разбавляют его 3,5 л воды . Ванна должна быть совершенно нейтральной . 4.Чистка никеля. Никелевые предметы , подлежащие чистке , смачиваются сперва 2-3 раза смесью из 50 г спирта (или водки) и 1 серной кислоты , затем их споласкивают водой и , смыв спиртом (или водки) . вытирают тонкой полотняной тряпкой . Ржавчина на никеле удаляется следующим образом : вымазать предмет каким-нибудь жиром и оставить так на несколько дней , затем тщательно вытереть нашатырным спиртом . Если ржавчина проникла глубоко , можно вместо нашатырного спирта взять разведенной соляной кислоты , которую однако оставляют на металле не более минуты .
По истечении означенного времени предмет вынимают из раствора , промывают в воде , в которой распущено самое небольшое количество мела , и затем тщательно просушивают . Полированное железо и сталь , покрытые указанным способом никелем , весьма прочно держат это покрытие . 3.Жидкость для никелирования. В 1,5 литра горячей воды растворяют 250 г никелевого купороса 181 г нейтрального виннокислого аммония и 2,5 г растворенной в эфире дубильной кислоты , фильтруют раствор и разбавляют его 3,5 л воды . Ванна должна быть совершенно нейтральной . 4.Чистка никеля. Никелевые предметы , подлежащие чистке , смачиваются сперва 2-3 раза смесью из 50 г спирта (или водки) и 1 серной кислоты , затем их споласкивают водой и , смыв спиртом (или водки) . вытирают тонкой полотняной тряпкой . Ржавчина на никеле удаляется следующим образом : вымазать предмет каким-нибудь жиром и оставить так на несколько дней , затем тщательно вытереть нашатырным спиртом . Если ржавчина проникла глубоко , можно вместо нашатырного спирта взять разведенной соляной кислоты , которую однако оставляют на металле не более минуты . Затем предмет вымывают водой и полируют мелом и крокусом . Если слой никеля покрылся голубоватым налетом , то его промывают смесью из спирта с серной кислотой в равных частях по объему . Промывание длится всего несколько секунд , затем предмет моют водою со спиртом и вытирают до суха .
Затем предмет вымывают водой и полируют мелом и крокусом . Если слой никеля покрылся голубоватым налетом , то его промывают смесью из спирта с серной кислотой в равных частях по объему . Промывание длится всего несколько секунд , затем предмет моют водою со спиртом и вытирают до суха . В отношении этих материалов применяются идентичные методы очистки.
В отношении этих материалов применяются идентичные методы очистки.
 Некоторые детали подвергаются хромированию с завода. Другие покрываются хромом самими автомобилистами в гаражных условиях или с помощью тюнинг-ателье.
Некоторые детали подвергаются хромированию с завода. Другие покрываются хромом самими автомобилистами в гаражных условиях или с помощью тюнинг-ателье.

 Важный нюанс: отбеливатель, в котором замачивалась хромированная деталь, запрещается использовать повторно, поскольку в нем будет содержаться хром, токсичный для человека.
Важный нюанс: отбеливатель, в котором замачивалась хромированная деталь, запрещается использовать повторно, поскольку в нем будет содержаться хром, токсичный для человека.


 Во время приготовления происходит реакция выделение тепла и пара, поэтому «бодяжить» следует в термостойкой емкости, но не в металлической.
Во время приготовления происходит реакция выделение тепла и пара, поэтому «бодяжить» следует в термостойкой емкости, но не в металлической. д.
д. В случае попадания раствора на кожу или не дай Бог в глаза, смойте его большим количеством воды с мылом. При появлении раздражения или зуда немедленно обратитесь к врачу.
В случае попадания раствора на кожу или не дай Бог в глаза, смойте его большим количеством воды с мылом. При появлении раздражения или зуда немедленно обратитесь к врачу. Помните, что соляная кислота является сильно коррозийным , поэтому при обращении с ней всегда следует использовать перчатки и защитные очки . Если у вас есть нужное снаряжение:
Помните, что соляная кислота является сильно коррозийным , поэтому при обращении с ней всегда следует использовать перчатки и защитные очки . Если у вас есть нужное снаряжение: 0032 бесплатно . Когда вы найдете более выгодный тариф, Джерри может помочь вам приобрести новое покрытие и даже отменить старый полис.
0032 бесплатно . Когда вы найдете более выгодный тариф, Джерри может помочь вам приобрести новое покрытие и даже отменить старый полис. Но когда я пошел заправлять его бензином, я не мог понять, как открыть крышку бензобака. Как я могу открыть крышку бензобака на моей Honda Odyssey 2019 года?
Но когда я пошел заправлять его бензином, я не мог понять, как открыть крышку бензобака. Как я могу открыть крышку бензобака на моей Honda Odyssey 2019 года? Узнайте об остальном здесь.
Узнайте об остальном здесь. Страхование бегемота
Страхование бегемота Ссылка
Ссылка 


 Похоже, что слой меди был нанесен, чтобы «удерживать» слой хрома.
Похоже, что слой меди был нанесен, чтобы «удерживать» слой хрома. Причина медного покрытия не в том, чтобы «удерживать», за исключением замысловатого смысла, что медь предназначена для того, чтобы быть мягким, пластичным слоем, помогающим поглощать напряжение и деформацию очень разных коэффициентов теплового расширения пластика по сравнению с металлом. . Если пластик очень старый, я думаю, возможно, что слою медного покрытия предшествует химическая медь, а не химический никель.
Причина медного покрытия не в том, чтобы «удерживать», за исключением замысловатого смысла, что медь предназначена для того, чтобы быть мягким, пластичным слоем, помогающим поглощать напряжение и деформацию очень разных коэффициентов теплового расширения пластика по сравнению с металлом. . Если пластик очень старый, я думаю, возможно, что слою медного покрытия предшествует химическая медь, а не химический никель.
 Перед покраской обязательно грунтую.
Перед покраской обязательно грунтую.  д. Иногда люди просто хотят удалить очень тонкий слой хрома, чтобы заново -сделайте это, или сделайте его более поддающимся покраске. В других случаях люди хотят удалить каждый слой покрытия, чтобы переработать АБС. Спасибо!
д. Иногда люди просто хотят удалить очень тонкий слой хрома, чтобы заново -сделайте это, или сделайте его более поддающимся покраске. В других случаях люди хотят удалить каждый слой покрытия, чтобы переработать АБС. Спасибо! Вот столовая ложка из медно-никель-хромированной стали десятилетней давности 🙂
Вот столовая ложка из медно-никель-хромированной стали десятилетней давности 🙂 Вторые мнения всегда приветствуются, но я еще не слышал обратного.
Вторые мнения всегда приветствуются, но я еще не слышал обратного. Вы, вероятно, не можете легко снять все слои покрытия с пластиковой решетки, но большинство людей здесь думают, что в этом нет необходимости. Удачи.
Вы, вероятно, не можете легко снять все слои покрытия с пластиковой решетки, но большинство людей здесь думают, что в этом нет необходимости. Удачи. Там медь в качестве базового слоя. Я попробовал небольшую установку с зарядным устройством и соленой водой, это удалило большую часть хрома, но проблема в том, что когда большая его часть ушла, часть больше не проводит электричество, поэтому она не удаляет остальную часть меди. Пожалуйста, помогите, я просто хочу закончить зачистку, чтобы я мог их покрасить.
Там медь в качестве базового слоя. Я попробовал небольшую установку с зарядным устройством и соленой водой, это удалило большую часть хрома, но проблема в том, что когда большая его часть ушла, часть больше не проводит электричество, поэтому она не удаляет остальную часть меди. Пожалуйста, помогите, я просто хочу закончить зачистку, чтобы я мог их покрасить.

 img.ria.ru/images/147971/80/1479718081_336:0:5712:4032_1920x0_80_0_0_79be67002075b80f07180b7551809cb6.jpg
img.ria.ru/images/147971/80/1479718081_336:0:5712:4032_1920x0_80_0_0_79be67002075b80f07180b7551809cb6.jpg Как часто надо менять это устройство, объяснил в интервью радио Sputnik вице-президент Национального автомобильного союза Антон Шапарин.
Как часто надо менять это устройство, объяснил в интервью радио Sputnik вице-президент Национального автомобильного союза Антон Шапарин.
 ). У меня такое устройство есть, и зимой оно неоднократно мне помогало», – заключил Антон Шапарин.
). У меня такое устройство есть, и зимой оно неоднократно мне помогало», – заключил Антон Шапарин. Естественно, что эти параметры актуальны только при соблюдении установленных правил эксплуатации. Однако чаще всего батарее приходится работать совсем не в идеальных условиях. Частые недозаряды, скачки температуры и другие факторы могут приводить к тому, что АКБ внезапно выходит из строя. Обычно это происходит неожиданно для водителя, но есть несколько признаков, которые могут дать сигнал, что батарея требует внимания и ее срок жизни уже подходит к концу. Есть несколько способов, позволяющий достаточно точно определить реальное состояние установленной под капотом аккумуляторной батареи.
Естественно, что эти параметры актуальны только при соблюдении установленных правил эксплуатации. Однако чаще всего батарее приходится работать совсем не в идеальных условиях. Частые недозаряды, скачки температуры и другие факторы могут приводить к тому, что АКБ внезапно выходит из строя. Обычно это происходит неожиданно для водителя, но есть несколько признаков, которые могут дать сигнал, что батарея требует внимания и ее срок жизни уже подходит к концу. Есть несколько способов, позволяющий достаточно точно определить реальное состояние установленной под капотом аккумуляторной батареи. Старенький источник питания может не справиться с тяжелыми условиями эксплуатации и внезапно полностью выйти из строя.
Старенький источник питания может не справиться с тяжелыми условиями эксплуатации и внезапно полностью выйти из строя. Если корпус поврежден — это признак того, что АКБ необходимо менять.
Если корпус поврежден — это признак того, что АКБ необходимо менять. И это вполне реально, достаточно лишь знать и выполнять некоторые простые правила.
И это вполне реально, достаточно лишь знать и выполнять некоторые простые правила. Если вовремя не восполнять потери с помощью зарядного устройства, то это также приводит к очень неприятным последствиям. Иногда причиной постоянного недозаряда может быть неисправность бортовой электроники, например, генератора.
Если вовремя не восполнять потери с помощью зарядного устройства, то это также приводит к очень неприятным последствиям. Иногда причиной постоянного недозаряда может быть неисправность бортовой электроники, например, генератора. Поэтому его надо время от времени протирать. Очищать и удалять с поверхности пыль, грязь, окись и потеки кислоты. Удалить их легко с помощью обычной хлопчатобумажной тряпки или салфетки. Чтобы нейтрализовать кислоту, которая содержится в электролите, можно использовать раствор пищевой соды.
Поэтому его надо время от времени протирать. Очищать и удалять с поверхности пыль, грязь, окись и потеки кислоты. Удалить их легко с помощью обычной хлопчатобумажной тряпки или салфетки. Чтобы нейтрализовать кислоту, которая содержится в электролите, можно использовать раствор пищевой соды. Последняя выпадает в осадок и имеет особенность накапливания на аккумуляторных пластинах. Этот процесс имеет негативные последствия, и получил название — сульфатация.
Последняя выпадает в осадок и имеет особенность накапливания на аккумуляторных пластинах. Этот процесс имеет негативные последствия, и получил название — сульфатация. И сделать это просто. Однако, если батарея сильно изношена, восстановление не возможно, то выход лишь один — купить новый автомобильный аккумулятор. Интернет-магазин 130.com.ua предлагает большой выбор батарей и ЗУ для них. У нас можно купить автоматическое зарядное устройство в Киеве, Одессе или Харькове по выгодной цене. Или выбрать новый аккумулятор.
И сделать это просто. Однако, если батарея сильно изношена, восстановление не возможно, то выход лишь один — купить новый автомобильный аккумулятор. Интернет-магазин 130.com.ua предлагает большой выбор батарей и ЗУ для них. У нас можно купить автоматическое зарядное устройство в Киеве, Одессе или Харькове по выгодной цене. Или выбрать новый аккумулятор. Как только вы решите, что вам нужно заменить его, фактическая установка новой батареи займет несколько минут.
Как только вы решите, что вам нужно заменить его, фактическая установка новой батареи займет несколько минут. Если вы живете в экстремальных условиях, вам придется чаще менять аккумулятор.
Если вы живете в экстремальных условиях, вам придется чаще менять аккумулятор. Он не может поддерживать стабильное освещение и одновременно управлять автомобилем. Вы также можете заметить, что внутреннее освещение и другая электроника также не работают должным образом, поскольку они тоже работают от батареек.
Он не может поддерживать стабильное освещение и одновременно управлять автомобилем. Вы также можете заметить, что внутреннее освещение и другая электроника также не работают должным образом, поскольку они тоже работают от батареек. Даже если ваш автомобиль все еще заводится, это может создать опасную ситуацию, поэтому немедленно проверьте его.
Даже если ваш автомобиль все еще заводится, это может создать опасную ситуацию, поэтому немедленно проверьте его.
 Они могут приехать прямо к вам домой, чтобы заменить аккумулятор (т. е. нет необходимости буксировать автомобиль в гараж).
Они могут приехать прямо к вам домой, чтобы заменить аккумулятор (т. е. нет необходимости буксировать автомобиль в гараж). 0003
0003 Он надеется получить полные права в течение следующих нескольких месяцев, но не уверен в требованиях к водительскому стажу. Сколько часов ему нужно провести в машине, прежде чем он сможет подать заявление на получение прав в Грузии?
Он надеется получить полные права в течение следующих нескольких месяцев, но не уверен в требованиях к водительскому стажу. Сколько часов ему нужно провести в машине, прежде чем он сможет подать заявление на получение прав в Грузии?
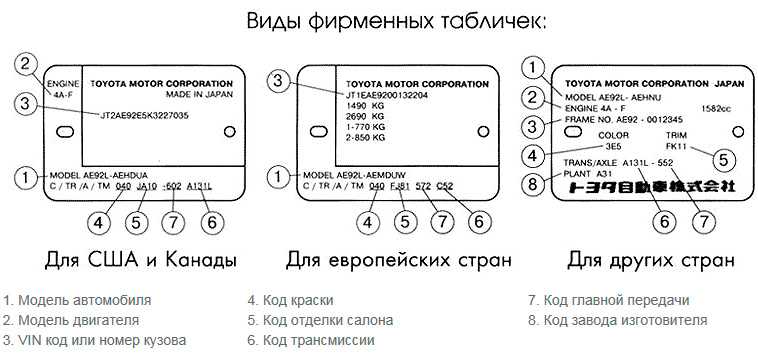 В случае, когда Вы выступаете в деле как обвиняемый, Вы можете ознакомится со всеми материалами дела, в том числе и с искомой личной информацией, согласно ч. 1 ст. 25.1 КоАП РФ:
В случае, когда Вы выступаете в деле как обвиняемый, Вы можете ознакомится со всеми материалами дела, в том числе и с искомой личной информацией, согласно ч. 1 ст. 25.1 КоАП РФ:
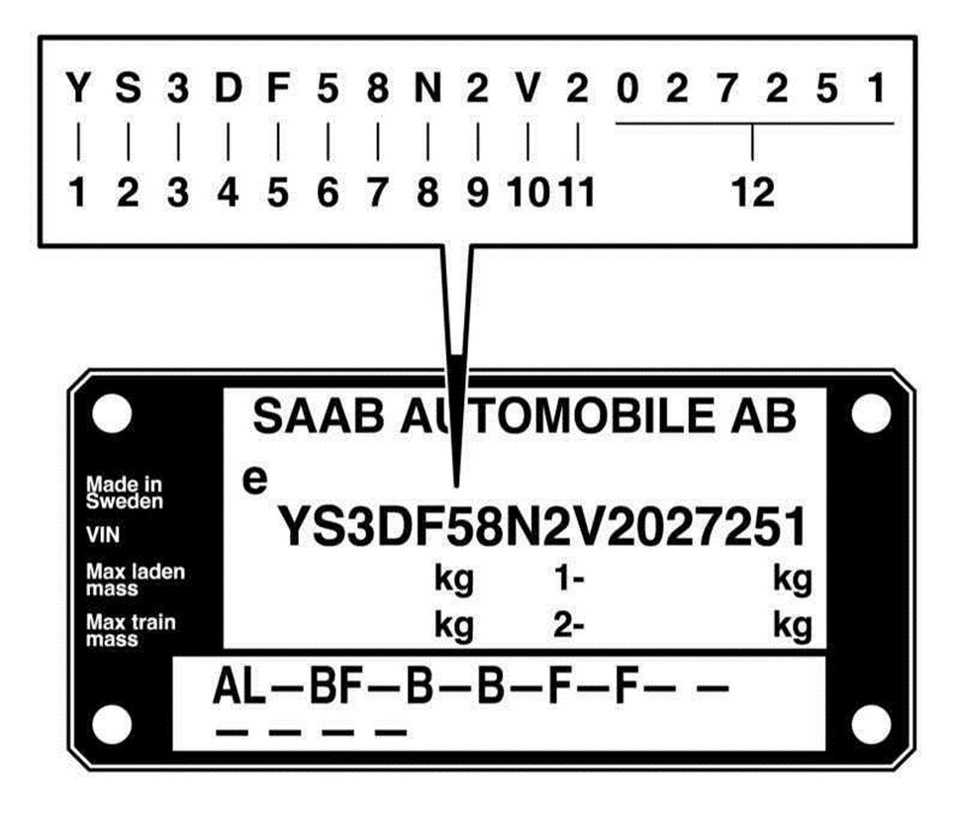
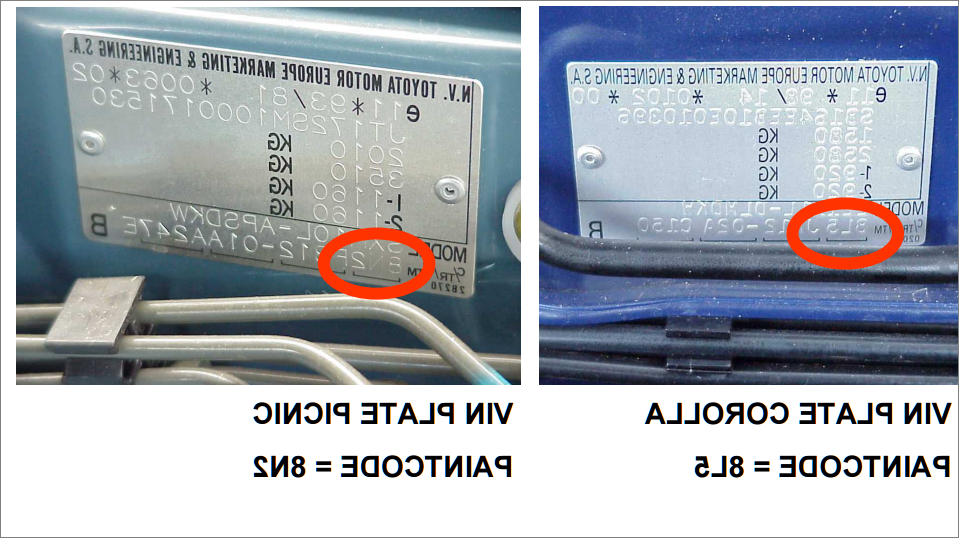
 номеру авто
номеру авто Бесплатно найти владельца авто по ВИН-коду нельзя, но даже и за деньги нет никаких гарантий, что Вы получите достоверную информацию об искомом человеке.
Бесплатно найти владельца авто по ВИН-коду нельзя, но даже и за деньги нет никаких гарантий, что Вы получите достоверную информацию об искомом человеке.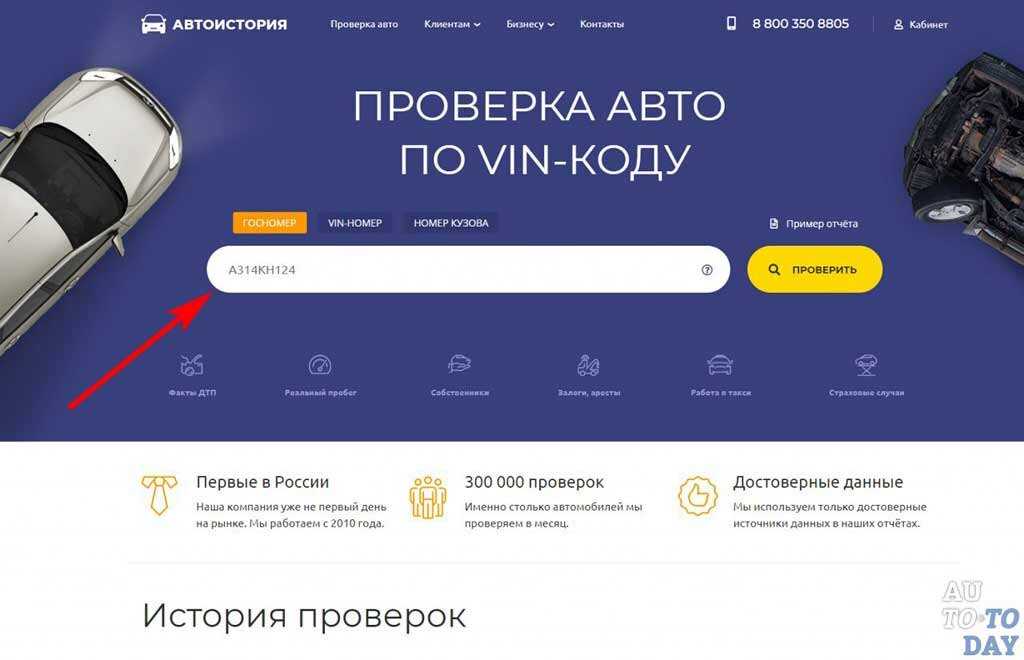

 Количество собственников определяет техническое состояние авто, ведь чем больше их было, тем дольше оно было в эксплуатации. Большое количество водителей автомобиля заставляет задуматься, почему они так часто менялись. Причин этому может быть несколько:
Количество собственников определяет техническое состояние авто, ведь чем больше их было, тем дольше оно было в эксплуатации. Большое количество водителей автомобиля заставляет задуматься, почему они так часто менялись. Причин этому может быть несколько: К сожалению, сайт Госавтоинспекции часто перегружен и зависает, базы периодически оказываются недоступными. Соответственно, проверить количество официально указанных хозяев у машины нет возможности. Также для пользования официальным ресурсом нужен компьютер или ноутбук. Делать с телефона это неудобно, ведь мобильной версии у сайта нет. Поэтому проверить сколько было водителей, можно на сервисе АвтоИстория.
К сожалению, сайт Госавтоинспекции часто перегружен и зависает, базы периодически оказываются недоступными. Соответственно, проверить количество официально указанных хозяев у машины нет возможности. Также для пользования официальным ресурсом нужен компьютер или ноутбук. Делать с телефона это неудобно, ведь мобильной версии у сайта нет. Поэтому проверить сколько было водителей, можно на сервисе АвтоИстория. Есть у сайта и мобильная версия.
Есть у сайта и мобильная версия. Этот 17-значный буквенно-цифровой код содержит информацию о марке и модели транспортного средства, а также о том, где оно было изготовлено и какое оборудование устанавливалось на транспортное средство на заводе. Быстрый декодер VIN сообщит вам эту основную информацию, но из этого числа можно узнать еще больше.
Этот 17-значный буквенно-цифровой код содержит информацию о марке и модели транспортного средства, а также о том, где оно было изготовлено и какое оборудование устанавливалось на транспортное средство на заводе. Быстрый декодер VIN сообщит вам эту основную информацию, но из этого числа можно узнать еще больше.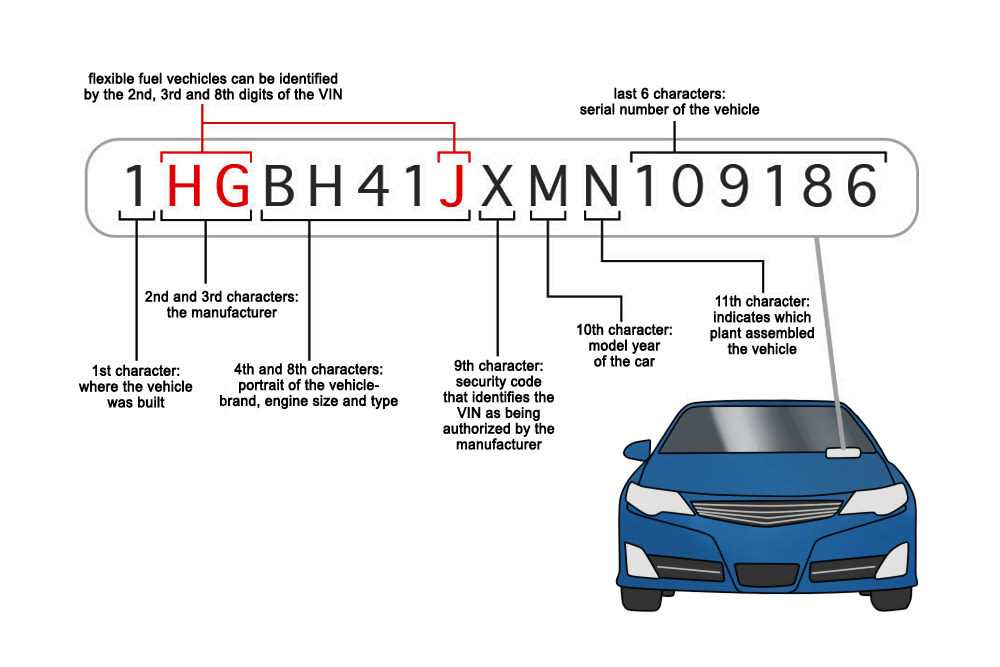
 Некоторые производители указывают VIN вместе со спецификациями, такими как рекомендуемое давление в шинах и максимальная полезная нагрузка. Другие используют отдельную наклейку, на которой указана информация о краске, шасси и двигателе. Не забудьте посмотреть на внешнюю сторону стойки между водительской и задней пассажирской дверью. Эта наклейка может быть скрыта, если открыта пассажирская дверь.
Некоторые производители указывают VIN вместе со спецификациями, такими как рекомендуемое давление в шинах и максимальная полезная нагрузка. Другие используют отдельную наклейку, на которой указана информация о краске, шасси и двигателе. Не забудьте посмотреть на внешнюю сторону стойки между водительской и задней пассажирской дверью. Эта наклейка может быть скрыта, если открыта пассажирская дверь. Таким образом, эти детали можно будет отследить в случае угона автомобиля. Однако некоторые числа могут не совпадать, поскольку детали могут быть сняты с другого автомобиля для устранения повреждений, полученных в результате аварии.
Таким образом, эти детали можно будет отследить в случае угона автомобиля. Однако некоторые числа могут не совпадать, поскольку детали могут быть сняты с другого автомобиля для устранения повреждений, полученных в результате аварии.
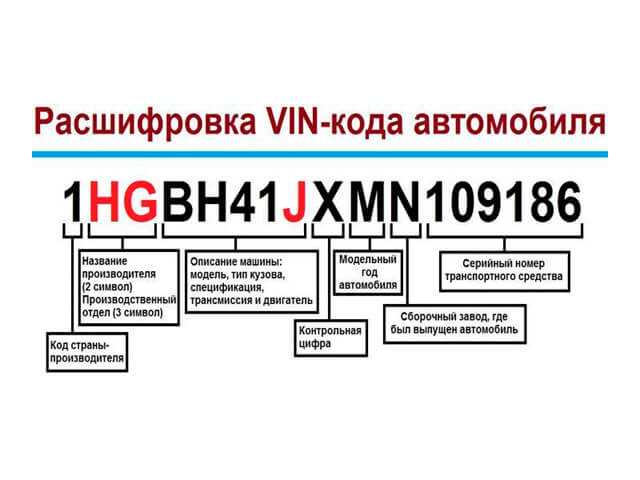 С помощью поиска по владельцам автомобилей вы можете установить связи со знаменитыми владельцами и проверить, были ли модификации внесены авторитетными мастерскими по индивидуальному заказу. получить иначе, даже при тщательном осмотре автомобиля.
С помощью поиска по владельцам автомобилей вы можете установить связи со знаменитыми владельцами и проверить, были ли модификации внесены авторитетными мастерскими по индивидуальному заказу. получить иначе, даже при тщательном осмотре автомобиля. 04.2023
04.2023

 org/Product»>
org/Product»>
 org/Product»>
org/Product»> Хвостовик 1,6мм. США теперь в вашей корзине покупок
Хвостовик 1,6мм. США теперь в вашей корзине покупок org/Product»>
org/Product»> Патрон зажимает 0-3 мм теперь в вашей корзине покупок
Патрон зажимает 0-3 мм теперь в вашей корзине покупок org/Product»>
org/Product»> org/Product»>
org/Product»> Россия теперь в вашей корзине покупок
Россия теперь в вашей корзине покупок Наши мосты НЕ имеют треугольной формы по какой-то причине. Наличие установочного винта на одной линии с инжектором дает вам наилучшие механические преимущества для монтажа, приложения давления на смолу и простоты использования. Мы предпочитаем, чтобы все было как можно проще. Наши мосты имеют пожизненную гарантию даже от нормального износа*!
Наши мосты НЕ имеют треугольной формы по какой-то причине. Наличие установочного винта на одной линии с инжектором дает вам наилучшие механические преимущества для монтажа, приложения давления на смолу и простоты использования. Мы предпочитаем, чтобы все было как можно проще. Наши мосты имеют пожизненную гарантию даже от нормального износа*! Мост для ремонта ветрового стекла — это устройство, которое надежно присасывается к стеклу ветрового стекла и облегчает нагнетание смолы для ремонта ветрового стекла в трещину или скол. Смола для ремонта ветрового стекла заполняет трещину или скол, а затем затвердевает или отверждается, чтобы восстановить целостность ветрового стекла и предотвратить увеличение размера трещины или сколов.
Мост для ремонта ветрового стекла — это устройство, которое надежно присасывается к стеклу ветрового стекла и облегчает нагнетание смолы для ремонта ветрового стекла в трещину или скол. Смола для ремонта ветрового стекла заполняет трещину или скол, а затем затвердевает или отверждается, чтобы восстановить целостность ветрового стекла и предотвратить увеличение размера трещины или сколов. Нет лобового стекла, к которому его нельзя было бы прикрепить, за редким исключением сколов на очень криволинейной части лобового стекла; поэтому практически нет ремонта трещин на лобовом стекле или ремонта сколов на лобовом стекле, с которыми он не может справиться!
Нет лобового стекла, к которому его нельзя было бы прикрепить, за редким исключением сколов на очень криволинейной части лобового стекла; поэтому практически нет ремонта трещин на лобовом стекле или ремонта сколов на лобовом стекле, с которыми он не может справиться!
 Инструмент для вырезания
Инструмент для вырезания 
 Это могут быть перчатки, защитные очки, аптечка и любое другое оборудование, необходимое компании.
Это могут быть перчатки, защитные очки, аптечка и любое другое оборудование, необходимое компании.
 ..
..