
Типы поршневых двигателей внутреннего сгорания: виды
Автопроизводители с каждым годом разрабатывают все больше новых моторов. Они отличаются по размерам, объему и мощности.
Линейки моторов, устанавливающихся на конкретный автомобиль, пестрят ассортиментом. На одну модель производитель может предлагать до 15 вариантов двигателей. Вид топлива, лошадиные силы, количество цилиндров, наличие турбины, тип впрыска, количество клапанов — отличают моторы друг от друга. Но одним из самых главных критериев для различия двигателей является их тип. Именно его чаще всего отмечают дополнительным шильдиком на крышке багажника. Двигатели внутреннего сгорания (ДВС) можно разделить на рядные, V-образные, VR-образные, опозитные и W-образные. Также к ним можно отнести роторный мотор. Авто Информатор разобрался, в чем же характерные различия этих ДВС.
Вкратце о принципе работы самого распространенного четырехтактного поршневого двигателя внутреннего сгорания.
- Поршень идет вниз от верхней мертвой точки, освобождая камеру сгорания (цилиндр) и засасывая смесь из открытого впускного клапана.
- Поршень движется к верхней мертвой точке, сдавливая смесь. Когда поршень приближается к ней, в камеру сгорания подается искра.
- Свободный ход поршня. После подачи искры смесь детонирует и выдавливает поршень из камеры сгорания.
- Когда поршень совершает свой четвертый ход, открывается выпускной клапан, через который поршень выдавливает отработанные газы из камеры сгорания.
4 такта работы одного цилиндра ДВС
Рядный двигатель
Ход поршней в рядном ДВС (R6 — 6 цилиндров)
Один из самых простых типов двигателя. Он обозначается буквой «R» (R3, R4, R5 и так далее). В таком моторе цилиндры расположены в ряд. Их может быть от двух до шести. Самый распространенный из рядных двигателей — 4-х цилиндровый. Но в истории есть автомобили и с рядными 8-ми цилиндровыми моторами.
V-образный двигатель
Ход поршней в V-образном двигателе (V8 — 8 цилиндров)
Следующий по популярности после рядного мотора. В таком двигатели цилиндры расположены друг напротив друга под углом от 10° до 120° (наиболее часто 45°, 60° и 90°) в форме латинской буквы «V», с равным количеством «котлов» на обоих сторонах. В таких моторах поршни вращают один общий коленчатый вал. На шильдике буква «V» обозначает тип двигателя, а следующие за ней цифры — количество цилиндров. Такие моторы бывают V6, V8, V10, V12. (не путать с 16V или 20V, в случае когда буква «V» расположена после цифр, она обозначает количество клапанов «Valve»).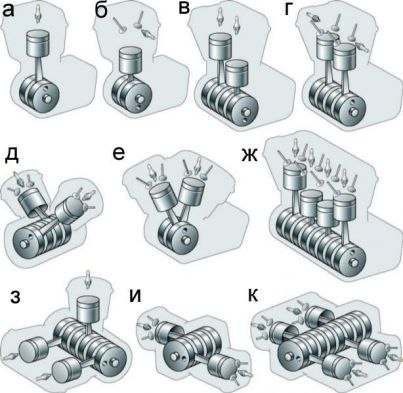
VR-образный двигатель
Так располагаются поршни в VR-образном двигателе
Знаменитый двигатель VR6 от Volkswagen, «V-образно-рядный» мотор (об этом и говорит обозначение VR). На таких двигателях применяется очень маленький развал блока, всего в 15°. Угол настолько мал, что такой мотор называют еще «смещённо-рядным». Самыми известными авто с таким мотором являются Golf VR6 и Passat VR6.
W-образный двигатель.
Ход поршней в W-образном двигателе (W16 — 16 цилиндров)
Этот мотор также разрабатывался компанией Volkswagen. Суть двигателя заключается в слиянии двух VR-образных моторов в один под углом 72°. Мотор W12 был презентован на концепт каре W12 Roadster. Он состоял из двух моторов VR6. Позже Volkswagen презентовал топовую версию Passat B5 с двигателем W8. Он компоновался из тех же двух VR6 моторов, только с «обрезанными» двумя цилиндрами с каждого. Самый известный W-образный мотор установлен на Bugatti Veyron. Его объем достигает 16,4 литра, а сделан он из двух моторов VR8.
Самый известный W-образный мотор установлен на Bugatti Veyron. Его объем достигает 16,4 литра, а сделан он из двух моторов VR8.
Оппозитный двигатель
Ход поршней в оппозитном двигателе
Двигатель внутреннего сгорания, в котором угол между цилиндрами составляет 180°. Отличается от V-образного с развалом в 180° тем, что стоящие напротив поршни достигают верхней мертвой точки одновременно, а не поочередно. Оппозитный мотор очень активно устанавливается в автомобили марки Subaru.
Рекомендуем посмотреть наш репортаж с чемпионата по дрифту. Он прошел в Киеве на автодроме «Чайка».
Виды лодочных моторов — полезная информация от «МедузаМоторс»
Главная Полезная информация Виды лодочных моторовВыбирая лодочный мотор, человек, прежде всего, надеется на то, чтобы двигатель обладал заявленной мощностью, бесперебойно функционировал и эксплуатировался на протяжении длительного времени. При этом также важно, чтобы он соответствовал тем требованиям, которые будут к нему предъявляться.
При этом также важно, чтобы он соответствовал тем требованиям, которые будут к нему предъявляться.
Плавание на моторной лодке, это не гребля на деревянном плоту вдоль берега и не сноутюб на ватрушках. Это быстрая езда по воде, и любая неисправность лодочного двигателя может обернуться большими неприятностями.
Какими же бывают моторы для лодок?
В зависимости от топлива они бывают бензиновыми, дизельными, водометными и электрическими.
В последнее время в среде лодочников на слуху бензиновые лодочные моторы Ямаха. Это двигатели очень разной мощности (2-400 лошадиных сил).
Более экономными и долговечными являются дизельные моторы. Они используются для больших судов.
Перемещение по мелководью хорошо осуществлять на лодке с водометным мотором, который изготавливается на базе 2-х или 4-хтактного двигателя. Это безопасные моторы, позволяют подводить плавательное средство непосредственно к берегу и рекомендуются для любителей серфинга и водных лыж.
С целью защиты окружающей среды на многих водоемах вводятся запреты на ДВС. Поэтому начали появляться электрические лодочные моторы. Они менее мощные чем, например, моторы Gladiator, зато не создают шума и имеют достаточное количество лошадиных сил для небольшого прогулочного или рыболовного судна. Современные модели оснащаются системой автоматического и дистанционного управления, что очень удобно.
Поэтому начали появляться электрические лодочные моторы. Они менее мощные чем, например, моторы Gladiator, зато не создают шума и имеют достаточное количество лошадиных сил для небольшого прогулочного или рыболовного судна. Современные модели оснащаются системой автоматического и дистанционного управления, что очень удобно.
Двигатели внутреннего сгорания в свою очередь подразделяются на 2-тактные и 4-тактные. Первые отличаются компактностью, простотой в обслуживании. Вторые обладают более высоким ресурсом производительности и тихой работой. Четырехтактные моторы более экономичны своих двухтактных собратьев.
Сегодня на рынке представлены модели японских, американских и китайских производителей. Первые две категории отличаются высокой надежностью, но и немалой ценой. Китайские моторы являются полными аналогами оригиналов, но изготавливаются из металла низшего качества. Поэтому двигатели из Поднебесной несколько уступают оригинальным моделям японских и американских производителей, но зато они в два раза дешевле.
Что такое бесколлекторный двигатель?
Типы моторов?
Двигатели/моторы в мультироторных аппаратах бывают двух типов:
- Коллекторные/Brushed (др. названия: DC)/Сoreless.
- Бесколлекторные/Brushless.
Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в этой статье.
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако именно появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.
Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.
В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший крутящий момент.
Плюсы и минусы БК — двигателей
Плюсы:
- Упрощённая конструкция мотора за счёт исключения из неё коллектора.
- Более высокий КПД.
- Хорошее охлаждение.
- БК-двигатели могут работать в воде! Однако не стоит забывать, что из-за воды на механических частях двигателя может образоваться ржавчина и он сломается через какое-то время. Для избежания подобных ситуаций рекомендуется обрабатывать двигатели водоотталкивающей смазкой.
- Наименьшие радиопомехи.
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения). Это несколько усложняет конструкцию и делает БК-двигатели дороже коллекторных. Однако если сложность конструкции является приоритетным параметром, то существуют БК-двигатели с встроенными регуляторами скорости.
Как выбрать двигатели для коптера?
При выборе бесколлекторных двигателей в первую очередь следует обратить внимание на следующие характеристики:
- Максимальный ток — эта характеристика показывает какой максимальный ток может выдержать обмотка двигателя за небольшой промежуток времени. Если превысить это время, то неизбежен выход двигателя из строя. Так же этот параметр влияет на выбор ESC.
- Максимальное напряжение — так же как и максимальный ток, показывает какое напряжение можно подать на обмотку в течение короткого промежутка времени.
- KV — количество оборотов двигателя на один вольт. Поскольку этот показатель напрямую зависит от нагрузки на вал мотора, то его указывают для случая, когда нагрузки нет.
- Сопротивление — от сопротивления зависит КПД двигателя. Поэтому чем сопротивление меньше — тем лучше.
Виды охлаждения двигателей мотоциклов
Принцип охлаждения двигателей мотоциклов по этой схеме такой же, как и у автомобилей.
Охлаждающая жидкость прокачивается насосом через каналы в стенках цилиндров и головках цилиндров двигателя, забирает от них тепло и отдаёт его радиатору. Между пластин радиатора проходит набегающий поток холодного воздуха и охлаждает радиатор.
Один из важнейших элементов системы — термостат. Он делит систему охлаждения на два контура – малый и большой. Когда двигатель холодный, клапан термостата закрыт. Циркулирующая при этом охлаждающая жидкость движется по малому контуру. Это позволяет отсечь большой объем охлаждающей жидкости, обеспечивая более быстрый прогрев двигателя.
На радиаторе, как правило, устанавливается вентилятор с электроприводом. Он включается при повышении температуры охлаждающей жидкости. Например, когда мотоцикл движется с низкой скоростью, когда набегающего потока воздуха недостаточно.
Достоинства
- Позволяет уменьшить тепловые зазоры и получить более высокую удельную мощность.
- Необходимо реже менять масло и фильтры, чем в случае с воздушным охлаждением.
- Обеспечивает более высокий ресурс двигателя.
- Более легкий запуск двигателя при низких температурах охлаждающей жидкости.
Недостатки
- Жидкостная система охлаждения состоит из большего количества деталей, поэтому вероятность её поломки выше.
- Жидкостное охлаждение утяжеляет мотоцикл по сравнению с воздушным.
- Жидкостная система дороже воздушной, что повышает стоимость мотоцикла.

- Жидкостную систему необходимо периодически обслуживать.
Лодочные моторы: типы, характеристики, управление
В виду большого количества моделей лодочных моторов с разными параметрами сложно определиться в выборе. Чтобы не ошибиться, нужно разбираться в параметрах и понимать подходит ли агрегат для эксплуатации в планируемых условиях.
Типы лодочных моторов
На современных лодках используются два типа двигателей – бензиновые (ДВС) и электрические.
Электрические моторы имеют небольшой вес и почти не шумят, проще по конструкции и дешевле в эксплуатации. Однако из-за того, что для мощных электромоторов потребовались бы слишком большие аккумуляторы они выпускаются маленькой мощности – до 5 л.с. (3677,5 Вт).
Кроме этого, в зависимости от емкости аккумулятора ограничена длительность плавания.
Электрические моторы обычно используют на водоемах где применение бензиновых двигателей запрещено по экологическим соображениям или где лишний шум нежелателен.

Диапазон мощностей ДВС намного шире, их хватает даже для эксплуатации на самых быстроходных и тяжелых судах. Дальность плавания значительно выше, чем на лодках с электромотором. Такие суда могут выходить в режим глиссирования, что снижает расход топлива. Однако подобные модели весят больше электрических. Кроме этого они дороже как сами по себе, так и в эксплуатации.
Двигатели отличаются и по своему назначению. Существуют классические лодочные моторы и вспомогательные.
- Классические – используются в качестве источники основного хода. Это могут быть и небольшие моторы для одноместной лодки, и мощные, для большого катера или яхты;
- Вспомогательные – используются на достаточно крупных судах как помощники при различных маневрах, поворотах, швартовке и других подобных случаях. Приводы имеют большую мощность, усиленный редуктор. Так же они могут использоваться в качестве классических лодочных моторов.
Существуют два типа конструкции, которая заставляет лодку перемещаться – это винт и турбина.
Винтовые
Винтовые конструкции используют вращение гребного винта. Модели могут быть использованы на всех видах водного транспорта, имеют несложную конструкцию и невысокую стоимость. Однако на мелководье вращающийся винт может задеть за дно или другой твердый предмет и поломаться.
Расстояние, на которое винт переместиться за один оборот без проскальзывания, называется шагом. Это основная характеристика винта, влияющая на нагрузку мотора. С увеличением шага винта скорость передвижения лодки увеличивается, и нагрузка на привод становится больше.
Проскальзывание винта это величина равная разнице между идеальным и реальным шагом винта.
Чем меньше проскальзывание, тем выше коэффициент полезного действия всего привода лодки.
От шага зависит и диаметр лопастей винта, эти два параметра взаимосвязаны и зависят от крутящего момента и мощности мотора.
Еще одна характеристика винта это количество лопастей. Чем больше лопастей, тем выше плавность хода и манёвренность. Однако при увеличении количества лопастей проскальзывание становится больше (увеличивается сопротивление воды) и эффективность привода уменьшается.
Чем больше лопастей, тем выше плавность хода и манёвренность. Однако при увеличении количества лопастей проскальзывание становится больше (увеличивается сопротивление воды) и эффективность привода уменьшается.
Следует учесть направление вращения винта. Вращение по ходу часовой стрелки при движении лодки вперед назвали правым, а в сторону противоположную движению часовой стрелки левым.
Стандартными являются винты с правым вращением, но если на лодке установлено два привода, винты должны крутиться в разные стороны, если винты будут совершать обороты в одну, сторону судно будет сносить при прямом положении руля.
Полезным устройством для судна с двумя моторами будет синхронизатор, который согласовывает работу обеих устройств, чтобы они работали совместно как один агрегат.
Для того, чтобы синхронизатор правильно работал, требуется использовать моторы одной модели.
Для того чтобы подобрать гребной винт нужно включить двигатель и подождать, пока он не выйдет на свою номинальную мощность, после измерить число оборотов в минуту тахометром на максимальных оборотах.
Если измеренное число вращения окажется меньше указанного в документации для данного мотора, нужно установить винт с меньшим шагом (это компенсирует нехватку оборотов). Уменьшение шага винта на один дюйм увеличивает количество оборотов на 200 об/мин.
Турбинные
В турбинном приводе винт спрятан в специальную трубу, он движет лодку за счет того, что засасывает воду с одной стороны трубы, после чего разгоняет ее винтом и выбрасывает с узкой стороны водомета. Такое расположение винта повышает безопасность использование судна в местах проведения водолазных работ, при катании на водных лыжах и вблизи пляжей.
Турбинные приводы идеально подходят для движения по мелководью, для их работы достаточно глубины в 30 сантиметров. Они более защищены от водорослей и плавающего в воде мусора. Суда, оборудованные турбинными конструкциями, отличаются мягкостью хода и небольшой вибрацией при работе на высоких и средних оборотах.
Требования к конструкции лодки при использовании турбинного привода:
- Она должна иметь запас грузоподъемности, чтобы нести кроме мотора еще и водомет;
- Лодка должна быть достаточно прочной, чтобы переходить в режим глиссирующего плавания;
- Резиновая лодка должна иметь достаточно прочные боковые баллоны и днище.

На большие катера устанавливаются несъемные турбины, которые становятся частью корпуса. Управление судном осуществляется со штурвала при помощи электрического или гидравлического привода.
Для лодок поменьше устанавливаются съемные турбины. Управлять приводом можно с кормы румпелем и со штурвала.
Регулировка погружения винта
У электромоторов существует регулировка заглубления гребного винта без его наклона. У ДВС глубина погружения регулируется наклоном мотора относительно горизонтальной оси.
Недостаточное заглубление приведет к тому, что гребной винт будет находиться в зоне гидродинамической тени кормы и не сможет развить тягу. В результате судно даже с мощным мотором не наберет высокую скорость.
Если гребной винт расположить ниже оптимальной отметки это вызовет ненужные напряжения в конструкции привода, и система выхлопа будет действовать менее эффективно, что уменьшит развиваемую мощность, а при прохождении мели увеличится риск поломки устройства.
Физические параметры лодки и двигателя
Вес и габариты лодочного мотора
Вес и основные размеры двигателя зависят от мощности и отличительных черт конструкции – чем он мощнее, тем больше размеры. Его масса находится в пределах от 3 до 350 килограмм.
Вес агрегатов:
- мощностью 6 лошадиных сил – 20 килограмм;
- 8 лошадиных сил – 30 килограмм;
- 35 лошадиных сил – 70 килограмм.
Вес ДВС указывается без учета топливного бака.
- Электрические моторы весят меньше, чем ДВС.
- Вес понадобится при расчете баланса лодки и ее полезной грузоподъемности.
- Габариты должны находиться в соответствии с размерами лодки.
Для ДВС существенным параметром считается диаметр цилиндра. В продаже можно найти моторы с диаметром цилиндра 40 – 100 миллиметров.
С увеличением диаметра цилиндра увеличивается угловая скорость, но уменьшается крутящий момент.
Еще одной существенной характеристикой ДВС считается ход поршня. В продаже имеются двигатели с ходом поршня 30 – 100 миллиметров. При увеличении хода поршня увеличивается крутящий момент, но одновременно уменьшается скорость вращения.
В продаже имеются двигатели с ходом поршня 30 – 100 миллиметров. При увеличении хода поршня увеличивается крутящий момент, но одновременно уменьшается скорость вращения.
При выборе мотора необходимо учитывать соотношение диаметра цилиндра к ходу поршня, у скоростных моделей это отношения стремится к единице.
Вес и длина лодки
Производители моторов указывают наибольший вес и длину лодки, для которой предназначено их устройство.
В данном случае учитывается вес не только корпуса лодки, но и снаряжения пассажиров и багажа.
Показатель не является жестким, но его соблюдение гарантирует наиболее эффективную работу привода.
Чем короче судно, тем больше следует загрузить нос, чтобы скомпенсировать вес двигателя, находящегося на корме.
Лодки длиной два метра рассчитаны на одного человека и могут выдерживать груз до 500 килограмм. При необходимости в такую лодку поместится до четырех человек. Трехметровые плавучие средства считаются наилучшим выбором для занятий рыбалкой или охотой. Лодки длиной четыре метра могут выдержать 6 человек.
Лодки длиной четыре метра могут выдержать 6 человек.
Высота транса для лодочного мотора
Для того чтобы правильно подобрать лодочный привод нужно определить высоту транца судна.
Транцем называется задняя часть лодки, на которой устанавливается двигатель. Высота транца это расстояние от низа до верха судна.
Чтобы гребной винт был расположен на оптимальной глубине, высота транца должна быть равна рекомендованной для привода.
В характеристиках двигателя рекомендованная высота транца обозначается латинскими буквами:
- S высота транса 380-450 миллиметров;
- L высота транса 500-570 миллиметров;
- X высота транса 600-640 миллиметров;
- U высота транса 650-680 миллиметров;
Длина дейдвуда это расстояние от места монтажа двигателя до нижней точки транса. Между антикавитационной плитой и нижней точки транца должно быть 15-25мм. В некоторых случаях наилучшая глубина погружения гребного винта определяется опытным путем.
У отдельных электрических приводов длина дейдвуда регулируется, в таких случаях в паспорте двигателя указывается его максимальное значение.
Типы крепления лодочного мотора
Существуют четыре способа крепления:
- Жесткое – привод зафиксирован на транце лодки без возможности поворота в какую-либо сторону;
- Поворотное – поворачивается по своей вертикальной оси;
- Откидное – способен вращаться по горизонтальной оси;
- Поворотно откидное – поворачивается относительно горизонтальной и вертикальной оси.
Поворотно откидное крепление обеспечивает простоту управления судном, за счет вращения по вертикальной оси и смягчает удары подводной части конструкции о препятствие за счет вращения двигателя по горизонтальной оси.
Чтобы вибрация корпуса судна была меньше подвеска должна быть сделана из упругих материалов.
Подъем мотора
Для предотвращения повреждения винта при швартовке лодки на отмели требуется поднимать мотор из воды. Во время длительной стоянки подъем двигателя уменьшает повреждения от коррозии. Существуют два типа механизмов подъема – ручной и электрогидравлический.
Во время длительной стоянки подъем двигателя уменьшает повреждения от коррозии. Существуют два типа механизмов подъема – ручной и электрогидравлический.
- Ручной механизм. Подъем осуществляется с помощью румпеля. Преимуществом является дешевизна и простота механизма подъема. Механизм нельзя использовать для подъема тяжелых мощных моделей.
- Электрогидравлический механизм. Для подъема человеку достаточно нажать кнопку. Единственный недостаток – высокая стоимость, поэтому конструкция используются только для подъема мощных двигателей.
Характеристики лодочных моторов внутреннего сгорания
Количество цилиндров
Камера двигателя, в которой ходит поршень, называется цилиндром. Бензиновые моторы могут быть двухтактными или четырехтактными.
Двухтактные бензиновые. По своей конструкции примитивны. В качестве топлива применяется смесь бензина и масла. Соотношение масла и бензина должно быть строго определенным.
Если в смеси масла будет больше чем нужно, мотор будет чадить, а если меньше, греться.
Из-за того, что в выхлопных газах находится больше вредных веществ не желательно использовать устройства поблизости от мест купания.
Дорогие модели комплектуются автоматическими механизмами смешивания, которые избавляют человека от ручного труда.
Двухтактные двигатели являются более дешевыми в эксплуатации, если сравнивать их с четырехтактными.
Четырехтактные. Работают плавно, тише и мощнее двухтактных двигателей, а их габариты больше. Уровень выброса вредных веществ невысокий. С увеличением количества цилиндров растет плавность хода и уменьшается расход топлива. У многоцилиндровых устройств меньше чувствительность к весу судна.
С уменьшением количества цилиндров увеличивается надежность изделия, так как его конструкция упрощается. Моторы, которые имеют небольшое количество цилиндров, отличаются небольшими размерами и весом.
Таким образом:
- Двухцилиндровый двигатель обеспечивает большую мощность при сравнительно небольших габаритах и весе, но его нельзя использовать в водоемах, в которых предъявляются повышенные требования к экологии.
- Четырехцилиндровый двигатель устанавливается на судах, использующиеся для лова рыбы методом троллинга, они работают сравнительно тихо и стабильно на низких оборотах.
Устанавливаются на судах имеющих большой вес и габариты.
Рабочий объем
Важной характеристикой бензинового двигателя является рабочий объем камеры сгорания, от него зависит потребление топлива и мощность привода. Для одноцилиндрового мотора вычисляется умножением площади поршня на его ход. Для многоцилиндровых бензиновых двигателей объем одного цилиндра следует умножить на количество цилиндров.
С увеличением рабочего объема увеличивается мощность, габариты мотора и расход горючего. Однако мощность зависит не только от рабочего объема, но и от других особенностей конструкции, например наличия турбонаддува и количества тактов.
Расход топлива
Величина, которая показывает, сколько горючего расходуется за один час работы двигателя, называется расход топлива. Чем выше мощность двигателя, тем больше он расходует бензина, поэтому нужно стремиться выбрать модель, которая при той же мощности имеет меньший расход.
Чем выше мощность двигателя, тем больше он расходует бензина, поэтому нужно стремиться выбрать модель, которая при той же мощности имеет меньший расход.
Тип топлива
Это марка горючего, с наименьшим допустимым октановым числом, который можно заливать в двигатель.
Допустимо использовать горючее, имеющее более высокое октановое число, но следует исключить топливо с показателями ниже указанного.
Стойкость горючего к детонации определяется по его октановому числу. Детонация вредное явление, которое приводит к падению мощности, возрастанию нагрузок и увеличению концентрации вредных элементов в выхлопных газах. Она возникает при использовании в качестве топлива бензина, у которого октановое число ниже, чем указано в техническом паспорте двигателя.
Например, маркировка бензина в странах СНГ начинается с букв АИ, в Азиатско-Тихоокеанском регионе RON, а в Европе EURO. В любом случае после букв стоят цифры, которые указывают значение октанового числа. Чем выше требования к топливу предъявляет двигатель, тем оно больше. Модели способные работать на 90-м бензине, можно использовать с 92-м или 95-м, но нельзя с 87-м и 76-м. Самые неприхотливые устройства работают на 76-м бензине.
Модели способные работать на 90-м бензине, можно использовать с 92-м или 95-м, но нельзя с 87-м и 76-м. Самые неприхотливые устройства работают на 76-м бензине.
Топливный бак
Для хранения запаса горючего служат топливные баки. Чем больше объем бака, тем большее расстояние преодолеет судно без дозаправки.
Кроме этого, чем больше мощность двигателя, тем больше горючего он потребляет, и соответственно бак для топлива должен быть более емким.
Большие баки занимают много места на судне, следует учесть, что с увеличением размеров и емкости бака возрастает его вес.
Топливные баки бывают двух типов: встроенные и внешние.
- Всторенные баки. Составляю одно целое с двигателем, что избавляет от необходимости сооружать отдельную систему подачи топлива. Однако это увеличивает вес и габариты агрегата, что негативно сказывается на управлении судном при помощи румпеля. Она не подходит для мощных устройств, потребляющие много бензина и требуют баков большой емкости.
 Встроенные баки обычно используются с двигателями, мощность которых не превышает 5 лошадиных сил;
Встроенные баки обычно используются с двигателями, мощность которых не превышает 5 лошадиных сил; - Внешняя система подачи топлива. Горючее подается по специальному шлангу из стоящего отдельно бака. Устройство делает мотор легче и подвижнее и для мощных двигателей требующих большое количество топливо является единственным возможным решением.
Перед тем, как приступить к выбору бака, нужно знать, сколько топлива расходует мотор и, исходя из этого, рассчитывать нужный объем, ведь во время плавания вы не сможете дозаправиться. Следует обратить внимание на прочность материала, из которого изготовлен бак. Обычно баки изготавливают из алюминия или нержавеющей стали. Материал должен быть прочным, упругим и эластичным.
Если в качестве горючего используется керосин, то емкость для него должна обладать повышенной герметичностью, так как это вещество очень текучее.
Бак должен иметь воздушный штуцер сбрасывающий избыточное внутреннее давление, возникающее в солнечную погоду в результате нагревания стенок и испарения горючего.

Рекомендуется покупать баки с рельефным дном для скапливания конденсата. Обратите внимание на качество комплектующих – шлангов, уплотнителей, штуцера, ведь именно от этих деталей зависит герметичность всей конструкции.
Тип системы смазки
Моторное масло требуется для смазки бензиновых моторов, и с увеличением мощности привода требуется больше масла. Поэтому чем больше двигатель, тем больший объем бака для масла потребуется.
Существуют два типа смазки, используемые в бензиновых моторах, это ручная и раздельная.
Ручная смазка используется в самых простых конструкциях. При таком типе смесь готовится вручную, после чего топливо заливается в бак. При подготовке смеси самостоятельно, важно не ошибиться с пропорциями, чтобы двигатель не перегревался и не чадил.
Раздельная – используется в более дорогих моделях. При этом масло заливается в свой бак, а бензин в свой и смешивание производится при подаче топлива в рабочую камеру. Данный механизм позволяет правильно выдерживать пропорции составляющих топлива.
Система подачи топлива
Для поддачи в рабочую камеру подготовленной смеси из горючего и воздуха предназначена система для подачи горючего.
Существуют два варианта систем: карбюратор и электронный впрыск.
В карбюраторной, горючее вместе с воздухом всасывается в рабочую камеру цилиндра во время фазы впуска. Они нетребовательны к качеству топлива и стоят дешевле, чем устройства с электронным впрыском. Однако моторы, использующие такую систему, потребляют больше горючего и сложнее в запуске.
В системах с электронным впрыском горючее подается принудительно, через форсунки. Концентрация воздуха в смеси регулируется на основании показаний датчиков. В двигателях снижается расход топлива при той же мощности, кроме того они проще в запуске. Однако они имеют сложную конструкцию, и отремонтировать своими руками не получится.
Выхлопная система
Бывает двух типов:
- над винтом,
- через винт.
В самых простых конструкциях устроенных по принципу над винтом, газы сбрасываются непосредственно в воздух. Они самые простые и дешевые, но создают неудобства для людей находящихся в лодке из-за создаваемого ими шума и вредных выхлопов.
Они самые простые и дешевые, но создают неудобства для людей находящихся в лодке из-за создаваемого ими шума и вредных выхлопов.
Более комфортным вариантом являются системы, в которых выхлопные газы сбрасываются в воду выше винта.
В системах через винт выхлопные газы сбрасываются в воду через ступицу винта. Они считаются наиболее технически совершенными, в них низкий уровень шума и лучше тяговые характеристики. Недостатком является высокая стоимость и сложность конструкции.
Запуск
В ДВС, устанавливаемых на судах, могут использоваться три типа стартеров: электрические, ручные и смешанные.
Для запуска двигателя с ручным механизмом человек управляющий судном должен дернуть за тросик, чтобы мотор заработал. Механизм меньше весит и более компактен, так как для ее работы не нужен аккумулятор. При использовании ручного механизма не нужно беспокоиться о том, заряжен ли аккумулятор.
Недостатком данной системы является то, что для запуска нужно приложить достаточно большую физическую силу.
Такой запуск применяется в приводах малой мощности.
В электрической системе для запуска применяется стартер, получающий питание от аккумулятора. Главное преимущество удобство запуска – нужно нажать кнопку или сделать поворот ключом в замке зажигания. Большие габариты и вес являются недостатком.
Устройства стоят достаточно дорого, применяются совместно с мощными двигателями, для которых использование ручных механизмов невозможно.
При смешанном типе в штатном режиме используется электрическая система, но имеется и ручной запуск на случай поломки либо разряженного аккумулятора. Смешанный тип запуска используется совместно с мощными двигателями, но не настолько, чтобы создать серьезные проблемы для ручного завода.
Смешанная система может быть использована на моделях мощностью 25 – 45 лошадиных сил.
Лодочные моторы с электронной системой зажигания
Для работы ДВС применяется система зажигания, воспламеняющая горючее при помощи электрической искры. Существуют два вида зажигания – механический и электронный.
Существуют два вида зажигания – механический и электронный.
Преимущества электронной системы зажигания по сравнению с механической:
- Создает сильную и устойчивую искру;
- Экономит горючее;
- Обеспечивает стабильный запуск;
- Надежно работает на малых оборотах;
- Более долговечно.
Лодочные моторы с турбонаддувом
В двигателях с турбонаддувом энергия выхлопных газов используется для нагнетания в цилиндры горючей смеси. В рабочую камеру при каждом такте попадает больше топлива, мощность возрастает без увеличения рабочего объема конструкции.
Двигатель с турбонаддувом будет занимать меньше места по сравнению с моделями той же мощности, но без него.
Устройства являются более экологичными, так как они обеспечивают полное сгорание топлива и поэтому их выхлопы содержат меньше вредных веществ.
При использовании необходимо неукоснительно соблюдать правила эксплуатации.
Генератор
В конструкции любого бензинового ДВС присутствует генератор, который вырабатывает электрическую энергию, необходимую для работы системы зажигания.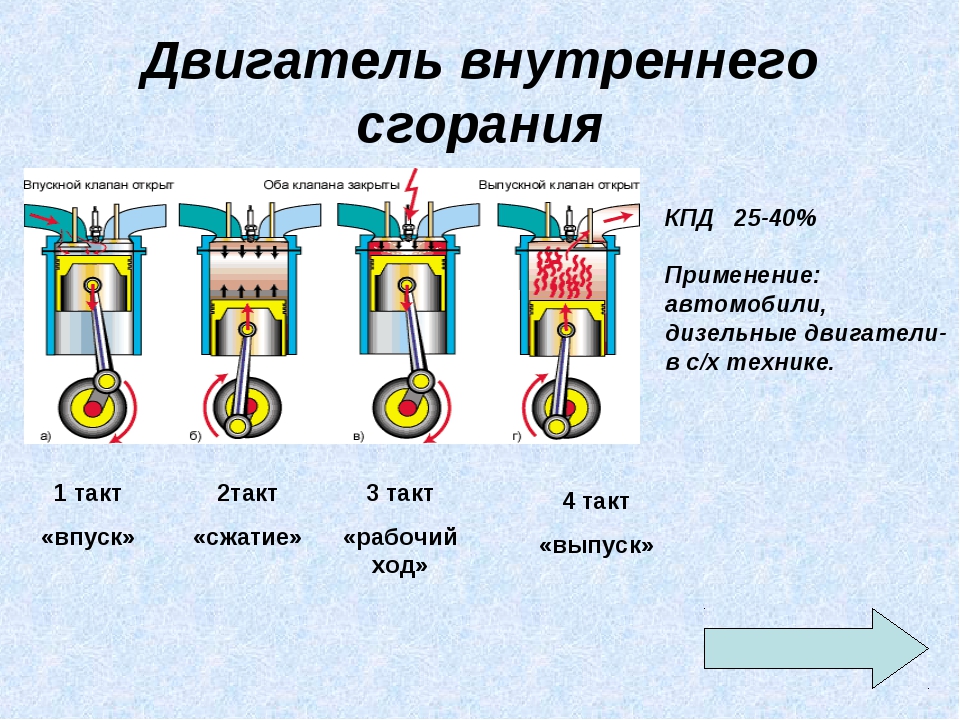 Однако не ко всякому генератору можно подключить внешние устройства. Питание от него удобнее, чем от аккумулятора и многие системы эхолокации, навигации, радиосвязи и другие рассчитаны на питание именно от генератора.
Однако не ко всякому генератору можно подключить внешние устройства. Питание от него удобнее, чем от аккумулятора и многие системы эхолокации, навигации, радиосвязи и другие рассчитаны на питание именно от генератора.
Стандартное напряжение на выходе генератора 12 вольт.
Одна из характеристик генератора – максимальный вырабатываемый ток (мощность, измеряется в амперах), чем он больше, тем больше различных устройств можно подключить к генератору.
Характеристики электромоторов
Тяга
Для электрических лодочных моторов указывают движущую силу, которую он может создать или тягу. Этот параметр измеряется в килограммах и служит объективным показателем возможностей мотора.
Параметр тяги нужно учитывать при выборе веса лодки. Тяга измеряется в фунтах (1 фунт = 0,453 кг). Расчеты данного параметра достаточно сложны и определяются по существующим таблицам, опираясь на вес лодки.
Аккумулятор
Аккумуляторы служат в качестве источников питания электромоторов. Мотор может быть рассчитан на питание от источника напряжением в 12 или 24 вольта, а все, наиболее распространенные аккумуляторы выдают напряжение 12 вольт.
Мотор может быть рассчитан на питание от источника напряжением в 12 или 24 вольта, а все, наиболее распространенные аккумуляторы выдают напряжение 12 вольт.
Поэтому для питания двигателя работающего от источника напряжения в 24 вольт нужно два аккумулятора, которые включают последовательно (важно – аккумуляторы должны быть идентичными по параметрам и одного производителя).
Для электрических лодочных приводов существуют два типа аккумуляторов: стартовые и тяговые.
Стартовые аккумуляторы способны выдавать большие значения тока, но только на протяжении короткого промежутка времени. При длительной работе происходит глубокая разрядка аккумуляторов, и они становятся непригодными для дальнейшей эксплуатации.
Тяговые аккумуляторы отлично выдерживают полный разряд и лучше приспособлены для работы в качестве источника тока для лодочных электрических двигателей.
Тяговые аккумуляторы послужат в 6-10 раз дольше стартовых.
Существуют тяговые аккумуляторы с гелевидным электролитом, который защищает пластины от вибрации и протечек при наклоне, батарея имеет высокую прочность.
Максимальный ток
Чем больше мощность двигателя, тем выше потребляемый максимальный ток, он важен при выборе аккумулятора. Максимальный ток разрядки аккумулятора должен быть больше максимального тока потребляемого мотором на 15-20%.
Зная емкость аккумуляторов и потребление мотора можно рассчитать время работы. Для этого нужно емкость аккумулятора разделит на потребляемый ток.
Например, при полностью заряженном аккумуляторе емкостью 80 ампер в час и двигателе, у которого максимальный ток равен 20 ампер двигатель будет работать 4 часа.
Важные характеристики
Мощность
Мощность двигателей измеряется в лошадиных силах. Это справедливо как при использовании бензиновых, так и электрических моделей. Это связанно с тем, что на рынке лодочных моторов известность завоевали бензиновые двигатели, и поэтому производители электрических изделий показывают мощность в лошадиных силах.
В техническом паспорте некоторых электромоторов мощность написана в киловаттах.
Чтобы перевести киловатты в лошадиные силы нужно умножить мощность в киловаттах на 1,3596.
Маркировка изделий производителей западных стран и СНГ отличаются. В технических характеристиках моторов произведенных в СНГ указываются максимальные данные на выходном валу привода. Западные производители указывают в паспорте мощность на гребном валу.
Таким образом, производители СНГ не учитывают потери на передачу движения от вала мотора до гребного вала, и поэтому мощность Западных приводов, при одинаковых значениях, будет немного выше.
Для того чтобы развить высокую скорость нужен сильный двигатель. Также он нужен для тяжелого судна с большой грузоподъемностью. Но с увеличением мощности привода растет и его вес, цена и расход топлива. Превышать мощность мотора, написанную в техническом паспорте лодки опасно по двум причинам:
- Лодка может не выдержать разгона до высоких скоростей;
- Транец лодки не рассчитан на большой вес.
С учетом эффективности и безопасности рекомендуется выбирать мотор, мощность которого составляет 60 – 80% максимально возможной для лодки.
Как выбрать мощность лодочного мотора
Для лодок, длинной не превышающих 3 метров, и на борту которых одновременно находится не более одного человека, подойдут двигатели мощностью 2 – 4 лошадиные силы.
На небольших и средних судах длиной до 4 метров устанавливаются модели в 5 – 8 лошадиных сил. Эти моторы удобны в транспортировке, так как их вес не превышает 30 килограмм. Устройства могут вывести маленькие лодки в особый режим – глиссирования. В таком режиме, только незначительная часть дна касается воды, а большая часть парит в воздухе. Это намного снижает сопротивление передвижению и нагрузку на двигатель.
Самыми популярными являются модели мощностью от 10 до 20 лошадиных сил, которые устанавливаются на лодки, длина которых находится в диапазоне 3 – 5 метров, а вес от 50 до 300 килограмм.
Их модно использовать для рыбалки, перевозки грузов на большие расстояния. Эти двигатели обеспечивают движение лодки с несколькими пассажирами и грузом.
Для лодок, длина которых достигает 6 метров (но не более), рекомендуется приобретать модели мощностью от 25 до 35 лошадиных сил. Лодки с таким мотором могут развивать скорость до 40 километров в час и выходить в режим глиссирования даже при большой загрузке.
Лодки длиной более 6 метров, служащие для перевозки больших грузов, и способные плавать с высокой скоростью, оснащены приводом мощностью 40-45 лошадиных сил. Они способны развивать скорость 50 километров в час.
На катера и яхты длиной 5 – 8 метров выбирают модели мощностью 90 – 140 лошадиных сил. Двигатели обеспечивают скорость судна, превышающую 100 километров в час, и применяются на значительных водных пространствах, также могут применяться для плавания в море.
На маленьких круизных судах и яхтах применяются моторы, мощность которых превышает 140 лошадиных сил.
Существуют три режима передвижения судна по воде:
- Водоизмещающий, в этом режиме плавают лодки с мотором малой мощности на небольшой скорости. Это самый неэкономичный режим из-за большого трения днища о поверхность воды;
- Переходный, это промежуточный режим, в котором лодка еще не вышла в режим глиссирования, но нос уже начинает приподниматься над водой. Обычно данный режим характерен для лодок, движущихся со скоростью 16 – 18 километров в час.
- Глиссирующий режим характерен для лодок, движущихся со скоростью более 20 километров в час. В этом режиме площадь соприкосновения дна с водой достигает минимума.
Судно при таком движении не раздвигает воду, а удерживается на ее поверхности подъемной силой, создаваемой за счет скорости передвижения. Затраты энергии, для достижения глиссирования больше, чем для поддержания такого движения.
Для того, чтобы судно могла войти в режим глиссирования оно должна иметь мощный двигатель и плоское дно.
Скорость необходимая для выхода в данный режим зависит от конструкции дна лодки, ее веса, распределения груза, гребного винта и двигателя.
Аварийный выключатель
Аварийный выключатель мотора предназначен для того, чтобы заглушить мотор при падении за борт человека управляющего судном, и таким образом, он предотвращает несчастный случай, причиной которого может стать неуправляемая лодка.
В комплектацию аварийного выключателя входит шнур, который крепится к запястью с помощью специального крепления. Когда человек сильно дергает за шнур в момент падения за борт, происходит аварийное отключение двигателя.
Максимальное число оборотов в минуту
При увеличении частоты вращения мотора увеличивается скорость судна. Количество оборотов винта лодки зависит от передаточного числа редуктора и шага винта. Однако на скорость судна кроме числа оборотов влияет еще множество факторов: конструкция винта, мощность двигателя и т.д.
Следует учесть, что модели с большим числом оборотов издают больше шума при своей работе.
В некоторых двигателях для защиты от перегрузки встроена система ограничения оборотов. При увеличении температуры выше критической автоматика снижает обороты, что позволяет агрегату остыть – скорость судна при этом падает, но двигатель остается неповрежденным.
В некоторых приводах встроена система стабилизация скорости судна. Она полезна в случаях, когда судно должно двигаться с постоянной скоростью без рывков, например при ловле рыбы методом троллинга. Недостаток – высокая стоимость.
Редуктор лодочного мотора
В лодочных приводах используется редуктор для понижения числа оборотов винта. Скорость винта равна величине угловой скорости вращения вала мотора деленной на передаточное число редуктора. Данный параметр не имеет большого практического значения и является справочным. Основные параметры привода, такие как мощность, тяга и другие практически не зависят от передаточного числа редуктора.
Внутри редуктора имеются трущиеся детали, которые время от времени нужно смазывать специальным трансмиссионным маслом. Хотя редуктор защищен от воды сальниками, со временем вода все равно попадает внутрь.
Поэтому рекомендуется для смазки редуктора использовать специальные масла, которые имеют в своем составе специальные антиэмульсионные присадки.
Производители не рекомендуют использовать обычные масла, которые используются для смазки коробки передач в автомобилях. Экономия на качественном масле закончиться дорогостоящим ремонтом редуктора.
Количество скоростей
Изменение скоростей привода, как передних, так и задних очень просто можно сделать для электрических моторов.
Для изменения скоростей в приводах использующих бензиновые двигатели служит коробка передач, что значительно усложняет конструкцию. В современных приводах обычно бывает реализовано от 2 до 5 скоростей.
Охлаждение лодочного мотора
Системы охлаждения бывают двух типов:
- Воздушное,
- Водяное.
Воздушная система охлаждения бывает:
- активная использующая вентилятор,
- пассивная с радиаторами.
Это очень простая конструкция и ее эффективность невысока. Применяется для двигателей, мощность которых меньше 15 лошадиных сил.
Плюс воздушной системы то, что ее можно использовать на водоемах с грязной водой.
Водяная система охлаждения использует воду из водоема и после использования сбрасывается за борт. Ее нельзя использовать, если вода за бортом сильно загрязнена. Данная конструкция более эффективны, чем воздушная и применяется в приводах большой мощности, однако она дороже и сложнее.
Передача
Система передач предназначена для измерения скорости и направления движения судна. Может находиться в трех положениях «передняя», «задняя» и «нейтрал».
«Передняя» передача включена при движении вперед, может иметь несколько скоростей.
При включении «задней» винт вращается в обратную сторону и заставляет судно двигаться в противоположную сторону. Эта функция отсутствует у дешевых моделей. «Задняя» передача удобна при экстренном торможении и маневрировании на небольшом пространстве. В электрических двигателях осуществляется за счет изменения полярности питания мотора.
При включенной «нейтральной» передачи вращение не передается от двигателя на вал и лодка не будет двигаться при работающем моторе. Система полезна в бензиновых моделях, так как их запуск достаточно сложная процедура. В электрических двигателях пуск и остановка не представляют никаких проблем, поэтому обычно не применяется для данных типов приводов.
Производить запуск двигателя нужно только с выключенной передачей, так как в противном случае запуск вызывает перегрузки в узлах конструкции привода и способствует рывку судна и столкновению с берегом или падению за борт людей.
Поэтому в некоторых моделях для предотвращения несчастных случаев предусмотрена система не дающая завести двигатель, если включена передача.
Индикаторы
Для того чтобы человек, управляющий судном мог следить за состояние привода, на лодку могут быть установлены дополнительные индикаторы. Если в паспорте мотора заявлена совместимость с индикатором, то это означает, что в конструкции присутствует датчик, а для снятия с него показаний индикатор нужно приобрести отдельно.
Наиболее часто на судах присутствуют:
- Спидометр определяет скорость передвижения судна относительно поверхности воды. Так как он определяет скорость передвижения судна относительно воды, а не берега, при быстром течении его показания значительно отличаются от фактической скорости передвижения судна относительно суши;
- Тахометр показывает угловую скорость вращения мотора и используется для контроля режима работы;
- Счетчик моточасов демонстрирует время работы двигателя. Данные получаемые с этого датчик нужны для того чтобы определить общий ресурс. Кроме этого процедуры технического обслуживания, замены масла и т.д. также выполняется после того, как двигатель отработал определенное количество часов;
- Индикатор давления масла нужен для того, чтобы вовремя предупредить о неполадках в системе смазки или о необходимости выполнить процедуру смены масла, потому что отсутствие масла грозит преждевременным износом мотора и даже аварией из-за его заклинивания;
- Индикатор температуры масла предупреждает о чрезмерном его перегреве. Когда масло нагревается да температуры выше допустимой оно теряет свои свойтства и не выполняет возложенных на него задач. Кроме этого резкое увеличение температуры сигнализирует о неполадках в механизме привода;
- Индикатор уровня масла показывает, сколько масла осталось в моторе и предупреждает, в случае необходимости, о необходимости пополнить его запасы;
- Индикатор заряда аккумулятора показывает уровень зарядки аккумулятора, с его помощью можно приблизительно рассчитать время работы электрического двигателя. В электрическом приводе он играет ту же роль, что и индикатор остатков топлива в бензиновом. Такими индикаторами могут оснащаться не только электрические, но и бензиновые двигатели с электрической системой запуска, чтобы можно было осуществлять контроль состояние аккумулятора и своевременно его заряжать;
- Индикатор остатков топлива демонстрирует, сколько горючего осталось в баке. Информация получаемого с этого датчика не совсем точна, но ее достаточно для практического применения;
- Индикатор расхода топлива демонстрирует, сколько горючего расходует двигатель при данном режиме работы в данный момент. По его показаниям, а также по показаниям индикатора остатков топлива, можно определить, какое время способен проработать мотор при данном режиме работы;
- Индикатор перегрева двигателя сигнализирует о повышении температуры выше предельно допустимой. Перегрев становится причиной различных неприятностей. Например, заклинивание или даже возгорание мотора, и это не зависит от причин его вызвавших, был ли он вызван технической неисправностью или естественной причиной, например, перегрев под воздействием прямых солнечных лучей;
- Индикатор превышения количества оборотов двигателя предупреждает о превышении частоты вращения выходного вала выше предельно допустимой. Отличается от тахометра тем, что не показывает частоту вращения вала, а только сигнализирует о превышении;
- Индикатор положения тримма, показывает текущее положение «ноги» двигателя. При наличии данного индикатора человеку управляющему судном не нужно постоянно присматриваться к устройству;
- Индикатор положения дросселя, выдает информацию о том, в каком положении находится дроссель, а значит, в каком режиме работает двигатель. С его помощью можно диагностировать неполадки привода;
- Индикатор, сигнализирующий о наличии в горючем воды, предупреждает о попадании в топливо посторонней жидкости, что ведет к снижению мощности и перебоям в работе, или может стать причиной гидроудара, который серьезно повредит мотор.
Управление
Разновидности систем управления
Управления производится румпелем или дистанционно. Существуют комбинированные приводы, управление которыми осуществляется как румпелем, так и дистанционно.
Румпель используется для управления двигателями малой и средней мощности. Он конструктивно выполнен в виде рычага. На румпеле находится ручка дросселя, с помощью которой регулируется подача топлива и кнопка остановки двигателя. Также румпель используется для выбора направления движения судна.
При таком способе, человек управляющий судном, должен все время находиться возле двигателя. Данные системы управления недороги, имеют несложную конструкцию и достаточно функциональны. У электрических моделей для регулировки скоростей существует специальный переключатель.
Наиболее удобное положение для управления лодкой выбирают, изменяя наклон румпеля. Поэтому следует искать привод с максимально возможным наклоном.
В дистанционной системе органы управления выведены на нос судна. Ее устанавливают на достаточно дорогих лодках, поэтому перед тем как покупать привод с дистанционным управлением следует убедиться, что его можно смонтировать на вашем судне.
Двигатели, которые могут управляться как при помощи румпеля, так и дистанционно стоят дорого и устанавливаются на судах топ класса.
Дистанционные системы управления судном
Существуют три типа рулевого управления:
- механическое,
- электрическое,
- гидравлическое.
В механическом управлении рулем, управление осуществляется с помощью тросов положенных вдоль борта. При повороте руля трос наматывается на шестерню рулевого редуктора, что вызывает поворот привода. Такая система стоит недорого и ее легко смонтировать самому.
Однако механизм имеет небольшой срок службы и для управления тяжелыми и мощными двигателями необходимо прикладывать значительные усилия.
Гидравлическая дистанционная система управления применяется на судах с двигателями мощностью более 150 лошадиных сил. Положительные качества: усилие, прикладываемое при управлении судном очень маленькое, такой механизм можно использовать на судах с несколькими двигателями, она имеет высокую надежность, к ней подключается автопилот. Недостаток только один – высокая стоимость.
Электрическая система позволяет отказаться от тросов, пульт управления связан с двигателем посредством кабеля, по которому передаются сигналы, а они приводят в действие поршни гидроцилиндров. Это устройство дает возможность синхронно управлять несколькими устройствами одновременно.
Эксплуатация
Лодочные приводы, предназначенные для эксплуатации в пресноводных водоемах, не рекомендуется использовать в морской воде. В морской воде применяются специальные конструкции с повышенной защитой от коррозии.
Передвижение по мелководью
В отдельных моделях приводов, для предотвращения контакта винта с водорослями и илом, предусмотрена регулировка глубины погружения мотора. Для передвижения по мелководью лучше использовать турбинный двигатель.
Чехол сумка для транспортировки
При перевозке двигателя в автомобиле чехол лодочного мотора защитит багажник от масла, которое могло остаться в агрегате, от водорослей, тины и другого мусора. Кроме этого чехол защищает сам мотор от царапин, сколов, ударов и продлит срок его службы.
Существует два типа чехлов сумок:
- Предназначенные для хранения двигателей – изготавливаются из крепкой водонепроницаемой ткани и снабжаются застежкой;
- Для транспортировки – обычно комплектуются специальными вставками, которые предохраняют двигатель от различных повреждений. Для их изготовления используется, прочная водонепроницаема ткань, которая не позволяет влаги и грязи попасть внутрь.
При выборе сумки нужно обратить внимание на такие моменты:
- Сумка должна подходить для вашей модели, то есть максимально повторять ее форму, для того чтобы мотор не болтался в сумке во время его транспортировки.
- Чехол должен быть изготовлен из водонепроницаемой ткани высокой прочности и укомплектован специальными вставками, чтобы защитить двигатель во время транспортировки.
Лодочный мотор. Виды и работа. Особенности и как выбрать
Лодочный мотор – это специальный двигатель, предназначенный для фиксации к транцу лодки для обеспечения быстрого движения без применения весел. Это подвесная конструкция, которая не занимает полезное пространство судна. Она используется на компактных лодках, предназначенных для прогулок, охоты или рыбной ловли. Мощность серийных моторов может достигать 350 л.с.
Типы моторов по разновидности силового агрегатаЛодочные двигатели отличаются между собой в зависимости от способа обеспечения движения. В качестве силового агрегата может использоваться несколько типов моторов:
- Электрический.
- Бензиновый двухтактный.
- Бензиновый четырехтактный.
- Дизельный.
Электрические характеризуются небольшой мощностью и габаритами, что компенсирует значительный вес батареи для их питания. Обычно в продаже встречаются только устройства до 5 л.с. Они недорогие и компактные, к тому же могут легко сниматься для хранения в безопасном месте для предотвращения воровства. Это важно если лодка постоянно находится на причале. Электромоторы тихоходные агрегаты. Их обычно выбирают для движения на водоемах с особым экологическим статусом, на которых запрещено использовать агрегаты с опасными выбросами или повышенным шумом.
Бензиновые двухтактные более распространены. Они являются самыми легкими устройствами, работающими на топливе. К сожалению, они более прожорливы и шумные. Для их заправки необходимо смешивать бензин с моторным маслом в пропорции рекомендуемой производителем. Такие устройства имеют ограниченный ресурс. У них значительная часть топлива сбрасывается в воду вместе с выхлопными газами, поскольку оно не успевает прогорать.
Четырехтактный мотор, работающий на бензине, более совершенный. Он тихоходный и потребляет на 30% меньше горючего, но и весит больше. Для него не нужно специально подготавливать топливо, поскольку бензин и масло заливаются по отдельности. Такой вариант подойдет для установки на судна длиной больше 3-4 м.
Дизельные наиболее экономичные в плане потребления топлива. Они тяжелее, и запускаются сложнее, особенно в зимнее время. При этом у них огромный ресурс и очень надежная конструкция. Мощность таких моторов на порядок выше, поэтому их часто устанавливают на прогулочные катера, когда на агрегат ложится большая нагрузка, сопровождаемая минимальными перерывами между поездками.
Виды лодочных моторов в зависимости от способа движенияСиловые агрегаты могут по-разному передавать создаваемое усилие на формирование движущей силы. Подвесной лодочный мотор может быть:
- С винтом.
- С турбиной.
Такие моторы имеют в своей конструкции гребной винт. Это самые распространенные устройства, которые хорошо подходят для движения на глубоководье. Они сравнительно недорогие и предусматривают более простое техническое обслуживание, которое зачастую можно провести самостоятельно без обращения в мастерскую. При этом такая конструкция имеет и недостатки. В первую очередь вращающийся винт может наматывать на себя водную растительность. Если она довольно жесткая, то двигатель останавливается. Также недостатком является высокая вероятность повреждения винта при движении на отмели. Он может деформироваться при ударе о камни.
Параметры винтовых двигателей во многом зависят от конструкции самого винта. Чем больше лопастей, тем более маневренной и быстроходной будет лодка. При этом форма винта должна соответствовать мощности силового агрегата. Обычно винты вращаются в правую сторону. В том случае если лодка имеет два мотора, то второй должен совершать обороты влево. Это предотвратит снос в сторону во время движения.
Турбинный лодочный моторМотор с турбиной еще называют водометным. Он также имеет винт, но тот укрыт в специальном канале, выполненном в виде трубки. Лопасти захватывают воду с передней части лодки и выбрасывают ее через более узкий проход, создавая тонкую струю. Повторяется принцип работы водомета. Такая конструкция не имеет открытых вращающихся частей. Благодаря этому она меньше страдает от длинных водорослей, а также не так подвержена механическим повреждениям при движении в условиях мелководья. Обычные суда с турбинным агрегатом способны двигаться даже на глубине 30 см. Это позволяет подходить на созданной тяге прямо к берегу, не используя весла.
Важным преимуществом турбинных лодочных моторов является их тихоходность и низкая вибрация. Их часто выбирают охотники для установки на резиновые лодки, чтобы меньше распугивать дичь. Также двигатели с водометами применяют для развлекательных лодок, которые курсируют на оживленных пляжах. Они более безопасны для пловцов.
Почему требуется настройка погружения винта или водометаЧтобы лодочный мотор работал как следует, необходимо правильно выставить глубину погружения его винта или турбинного механизма. Если поставить привод слишком высоко, то лодка не сможет развивать свою оптимальную скорость. Если перестараться и заглубить слишком сильно, то создастся повышенная нагрузка, что может сопровождаться вибрацией от мотора, передаваемой на корпус судна. Также если перестараться с глубиной, то повышается вероятность случайного повреждения винта или водомета в случае движения на высокой скорости по участку с выступающими камнями.
Многие типы топливных лодочных моторов предусматривают систему выхлопа газов через винт, а не сверху. Для них чрезмерное заглубление приводит к созданию дополнительной нагрузки на агрегат. Ему сложнее вытолкнуть отработанные газы из камеры сгорания. В результате мотор больше греется и не может набрать свою полную мощность.
У электрических двигателей предусматривается специальный механизм для регулировки глубины винта. У моторов на ДВС это осуществляется путем наклона самого агрегата. Для этого предусматривается специальный механизм, который дает возможность менять положение оси относительно горизонта.
Выбор мотора под габариты лодкиПокупая лодочный мотор, следует обратить внимание на рекомендации производителя. Он всегда указывает максимальные параметры судна, для которого может подойти данный агрегат. В первую очередь это касается длины лодки и ее веса. Вполне возможно установить более слабый двигатель, но при этом нужно понимать, что динамика движения понизится. При этом если поставить слишком мощное устройство, то использование такого водного средства небезопасно. Чтобы это компенсировать, необходимо нагрузить нос лодки, это уберет ее чрезмерный подъем при разгоне.
Также важным критерием являются габариты транца лодки. Это задняя жесткая часть, предназначенная для фиксации двигателя. Информация о том, какой транец подходит под агрегат имеется в инструкции для мотора. Если данные показатели не будут совпадать, то не удастся настроить правильное заглубление винта. Зачастую параметры рекомендуемого транца указываются в название самого мотор.
Для этого используются латинские буквы:
- S – 38-45 см.
- L – 50-57 см.
- X – 60-64 см.
- U – 65-68 см.
Лодочный мотор может иметь различную систему запуска. В плане электрических устройств никаких проблем нет. Достаточно нажать кнопку и винт начинает вращаться. В случае с агрегатами на ДВС все гораздо сложнее. В них применяется несколько способов пуска:
- Ручной.
- Электрический.
- Комбинированный.
Моторы с ручным пуском самые распространенные, поскольку недорогие и обладают меньшим весом. В качестве стартера у них применяется шнурок, наподобие используемого в бензопилах и мотокосах. Сначала нужно прокачать топливо с помощью специального ручного насоса, после чего дернуть за шнурок. Это требует значительной физической силы. Хотя это и популярная конструкция, но она имеет и недостаток. Зачастую после рывка за шнур тот может потянуть в обратную сторону, вызвав болевые ощущения и растяжение связок руки. Особенно эта проблема актуальна для дизельных двигателей.
Электронный пуск намного удобнее. Лодочные моторы более высокого класса имеют электростартер, который при нажатии кнопки или повороте ключа, в зависимости от модели, раскручивает коленвал и мотор запускается. Это действительно очень удобно, но за это придется доплатить и поплатиться весом устройства. Это большой недостаток, поскольку такие агрегаты стоят дорого, и оставлять их на лодке возле причала нежелательно. В связи с этим большинство рыбаков вынуждены снимать двигатель и переносить его для хранения в защищенное место. Также такие агрегаты имеют аккумуляторную батарею, которая необходима для пуска стартера.
Комбинированный лодочный мотор может запускаться как от стартера, так и вручную. Если аккумулятор сел, то это не проблема и всегда можно воспользоваться шнурком. Подавляющее большинство агрегатов являются именно комбинированными. Моторы чисто с электронным пуском более редкие.
ГенераторПрактически любой лодочный мотор, который работает на топливе, имеет в своей конструкции генератор. Он вырабатывает электроэнергию, требуемую для подзарядки аккумулятора. Даже те устройства, которые запускаются вручную, могут иметь генератор, что необходимо для подключения внешних электрических приборов. В первую очередь это система навигации, рация, эхолот или другое оснащение. Генераторы вырабатывают постоянный ток напряжением 12В. При выборе двигателя необходимо ориентироваться по тому, какой способ подключение внешнего оборудования в нем предусматривается, чтобы избежать несовместимости.
Похожие темы:
Космические моторы. Главные разработки Валентина Глушко, известные на весь мир
2 сентября исполнилось 110 лет со дня рождения инженера, ученого и конструктора, занимавшегося разработкой ракетных двигателей и космических систем, — Валентина Петровича Глушко. При его непосредственном участии был разработан целый ряд двигателей, на которых до сегодняшнего дня летают космические носители «Союз» и «Протон», а также межконтинентальная баллистическая ракета «Воевода», которая известна на Западе как «Сатана». ТАСС собрал главные изобретения знаменитого конструктора ракетно-космической техники.
Первый электрический реактивный двигательПод руководством Глушко был разработан первый в мире электротермический реактивный двигатель. Опытный образец был создан в СССР — в Газодинамической лаборатории в Ленинграде, которой заведовал Глушко, в 1929 году.
Спецпроект на тему
В двигателе в камеру сгорания устанавливались специальные проводники (из железа, палладия других металлов), на эти проводники подавались кратковременные, но мощные импульсы электрического тока с определенной частотой. Сам процесс назывался «электрическим взрывом» — при прохождении разряда проводники в прямом смысле разрушались, выделяя водород, который истекал из сопла двигателя и создавал тягу. Позже работы по этим двигателям были свернуты из-за низкой мощности.
Впервые в советской космической промышленности электрореактивные двигатели (ЭРД), но с иным принципом, были применены значительно позже — в 1964 году в космос был отправлен спутник «Зонд-2», с шестью установленными плазменными двигателями ориентации.
В современной космической технике применяются различные ЭРД, например, ионный (ионизированный газ разгоняется в электрическом поле). Такие модели, как и первый двигатель Глушко, имеют малую тягу, но могут работать за счет низкого расхода рабочего тела чрезвычайно долго — до нескольких лет. В качестве маршевого ЭРД был, например, установлен на японском космическом аппарате «Хаябуса», запущенном для изучения астероида Итокава. ЭРД широко применяются на спутниках в качестве двигателей коррекции траектории.
Первые в СССР жидкостные ракетные двигателиПод руководством Глушко после завершения работ по ЭРД впервые в отечественной космической промышленности была создана целая серия опытных ракетных двигателей, работающих на жидком топливе. Серия называлась ОРМ — опытные ракетные моторы. В качестве топлива в двигателях серии использовались керосин, бензин, толуол, другие вещества.
Советские ученые экспериментировали как со смешанными унитарными, так и с двухкомпонентными топливами. Первые образцы, работавшие на унитарном топливе (ОРМ-1 тягой всего 20 кгс), были крайне несовершенны и терпели отказы, вплоть до аварийных ситуаций — двигатели взрывались на стендах во время работы. В итоге был сделан выбор в пользу более безопасной двухкомпонентной схемы — отдельные баки для горючего, отдельные для окислителя.
На эту тему
Работы над двигателями серии ОРМ Газодинамическая лаборатория начала в 1930-х годах, и к 1933-му был создан достаточно мощный образец ОРМ-52 с тягой 300 кгс. Под этот двигатель был разработан целый ряд реактивных летательных аппаратов («РЛА-1», «РЛА-2» и так далее), но их образцы «в железе» не создавались. По задумке инженеров, РЛА должны были взлетать на высоту нескольких километров и выбрасывать контейнер с метеоаппаратурой, которая затем опускалась бы на землю на парашюте. ОРМ-52 прошел официальные государственные испытания, правда, только на стенде. На одном из запусков образца двигателя в 1933 году присутствовал начальник вооружения Красной Армии маршал Михаил Тухачевский и дал работе лаборатории Глушко положительную оценку.
В 1934 году коллектив Газодинамической лаборатории из Ленинграда был объединен с московской группой изучения реактивного движения (под руководством Сергея Павловича Королева) в Реактивный научно-исследовательский институт. Ученые совместными усилиями продолжили разработку двигателей и носителей под них. Коллектив Глушко создал образцы с номерами от ОРМ-53 до ОРМ-102. В частности, двигатель ОРМ-65 разработки Глушко ставился на созданную Королевым крылатую ракету — «объект 212». В 1939 году прошли ее испытания — ракета с ОРМ-65 достигла высоты 250 м, когда преждевременно раскрылся ее парашют. Двигатель ОРМ-65 работал на азотной кислоте и керосине, развивал тягу 150 кгс и мог работать до 80 секунд.
Двигатели для баллистических и космических ракетС 1946 года Глушко был назначен главным конструктором ОКБ-456 в Химках (сейчас НПО «Энергомаш» — главный разработчик и производитель российских ракетных двигателей — прим. ТАСС). Здесь под его руководством созданы двигатели для первых советских баллистических ракет Р-1, Р-2 и Р-5.
В 1954–1957 годах коллектив ОКБ-456 разработал жидкостные ракетные двигатели РД-107, которые впоследствии будут устанавливаться на знаменитую ракету Р-7, сконструированную коллективом ОКБ-1 под руководством Королева, так называемую королевскую семерку. Это была первая в мире полноценная межконтинентальная баллистическая ракета с максимальной дальностью полета 8 тыс. км и одним термоядерным зарядом мощностью 3 мегатонны. Первый запуск Р-7 состоялся 15 мая 1957 года, на вооружение Ракетных войск стратегического назначения она была принята в январе 1960-го.
Жидкостный ракетный двигатель «РД-107» бокового блока ракеты-носителя «Восток»
© Черединцев Валентин/ТАССНа базе Р-7 был создано целое семейство ракет космического назначения. В частности, знаменитый «Восток», на котором 12 апреля 1961 года в космос отправился Юрий Гагарин. Модификации этой ракеты используются до сих пор — с грузовыми кораблями и спутниками в космос стартуют ракеты серии «Союз-2», с пилотируемыми — «Союз-ФГ» (со следующего года запуски космонавтов будут переведены на «Союз-2»). До сих пор на этих ракетах используются модификации двигателей, разработанных Глушко: версии РД-107 для боковых и центрального блока первой ступени и варианты РД-108 — для второй ступени.
Также сотрудники ОКБ-456 под руководством Глушко создали двигатель РД-253, который с изменениями и сейчас используется в самой массовой серии советских и российских тяжелых грузовых ракет «Протон». Последний вариант — «Протон-М» — использует на первой ступени шесть двигателей РД-276, которые являются глубокой модернизацией РД-253 Глушко.
На эту тему
Параллельно известный конструктор работал над двигателями для советских баллистических ракет, появившихся после Р-7. В частности, самая мощная на сегодняшний день и стоящая на вооружении РВСН тяжелая межконтинентальная ракета «Воевода» использует на первой ступени двигатель РД-264, разработанный при непосредственном участии Глушко.
«Энергия — Буран»В 1974 году было создано НПО «Энергия» (сейчас Ракетно-космическая корпорация «Энергия»), в новую организацию вошло Центральное конструкторское бюро машиностроения (ОКБ-1, переименованное так после смерти Королева), а также КБ «Энергомаш» (бывшее ОКБ-456). Глушко стал главным конструктором «Энергии», название которой, по некоторым данным, он и придумал.
Несмотря на все его усилия, НПО «Энергия» не получило заказ от государства на разработку двигателей под ракету сверхтяжелого класса Н-1 для советской лунной программы. Идеи конструктора были отклонены из-за токсичности предложенных им компонентов топлива. Позже он в своих письмах не оставляет планов покорения Луны, в частности, предлагает руководству страны в течение десяти лет разработать и создать систему доставки космонавтов к естественному спутнику Земли и орбитальный лунный модуль весом 60 тонн, который обеспечит высадку на Луну трех космонавтов. Однако этим планам не суждено сбыться.
Универсальная ракетно-космическая транспортная система «Энергия» с орбитальным кораблем многоразового использования «Буран» на стартовом комплексе космодрома Байконур, 1988 год
© Альберт Пушкарев/ТАССВ 1976 году внимание Глушко переключается на совсем другую тему — создание челнока «Буран» как ответа на запуски американских многоразовых кораблей «Спейс Шаттл». Отечественная многоразовая система «Энергия — Буран» создавалась под непосредственным руководством Глушко и по его проекту, именно он настоял на облике сверхтяжелой ракеты «Энергия» и предложил вид двигателя первой ступени РД-170. Успешный запуск «Бурана» прошел в ноябре 1988 года в автоматическом режиме.
Кроме двигателей, под руководством Глушко был выполнен ряд ключевых работ по направлению пилотируемой космонавтики. Так, конструктор возглавлял работы по совершенствованию пилотируемых космических кораблей «Союз», им была предложена концепция многомодульной станции «Мир»: НПО «Энергия» выдвинула свои предложения по созданию новых орбитальных станций в 1976 году, эскизный проект «Мира» был готов в 1978 году.
Подготовила Валерия Решетникова
12 основных типов двигателей, используемых для промышленных электроприводов
Несколько слов об электрических приводах
Практически все современные промышленные и коммерческие предприятия используют электрический привод вместо механического привода, поскольку он обладает следующими преимуществами:
12 основных типов двигателей, используемых для Промышленные электроприводы (фото из презентации DOE Navigant Master)- Он прост по конструкции и требует меньших затрат на техническое обслуживание
- Его скорость регулируется легко и плавно
- Он аккуратный, чистый и не содержит дыма или дымовых газов
- Его можно установить в любом удобном месте, что обеспечивает большую гибкость в компоновке.
- Может управляться дистанционно
- Компактный, занимает меньше места
- Его можно запустить немедленно, без потери времени
- Он сравнительно дольше жизнь.
Однако система электропривода имеет два присущих недостатка:
- Она останавливается при отключении электроэнергии и
- Ее нельзя использовать в удаленных местах, не обслуживаемых электроснабжением.
Однако два вышеупомянутых недостатка можно преодолеть , установив дизельные генераторы постоянного тока и трехфазные генераторы переменного тока с турбинным приводом, которые могут использоваться либо при отсутствии, либо при отказе от нормального электроснабжения.
Типы двигателей для промышленных электроприводов
Хорошо, давайте кратко рассмотрим двенадцать основных типов двигателей, используемых для различных промышленных электроприводов:
- Двигатель серии постоянного тока
- Параллельный двигатель постоянного тока
- Накопительный составной двигатель
- Трехфазный синхронный двигатель
- Асинхронный двигатель с короткозамкнутым ротором
- Двигатель с короткозамкнутым ротором
- Асинхронный двигатель с скользящим кольцом
- Однофазный синхронный двигатель
- Однофазный серийный двигатель
- Отталкивающий двигатель
- Пуск конденсатора Индукционный пуск Двигатель
- Пуск конденсатора и Запуск двигателя
1.Двигатель серии постоянного тока
Поскольку он имеет высокий пусковой крутящий момент и регулируемую скорость , он используется для тяжелых условий эксплуатации , таких как электровозы, сталепрокатные станы, подъемники, подъемники и краны.
Вернуться к Типам двигателей ↑
2. Шунтирующий двигатель постоянного тока
Он имеет средний пусковой момент и почти постоянную скорость.
Параллельный двигатель постоянного тока используется для привода линейных валов с постоянной скоростью, токарных станков, пылесосов, деревообрабатывающих станков, стиральных машин, лифтов, конвейеров, шлифовальных машин, малых печатных машин и т. Д.
Вернуться к Типам двигателей ↑
3. Накопительный составной двигатель
Накопительный составной двигатель — это двигатель с переменной скоростью и высоким пусковым моментом , который используется для привода компрессоров, центробежных насосов с регулируемым напором, роторных прессы, дисковые пилы, ножницы, элеваторы, непрерывные конвейеры и т. д.
Вернуться к Типам двигателей ↑
4. Трехфазный синхронный двигатель
Поскольку его скорость остается постоянной при переменных нагрузках , Трехфазный синхронный двигатель используется для привода непрерывно работающего оборудования с постоянной скоростью, такого как аммиачные и воздушные компрессоры, мотор-генераторные установки, непрерывные прокатные станы, бумажная и цементная промышленность.
Вернуться к Типам двигателей ↑
5. Асинхронный двигатель с короткозамкнутым ротором
Этот двигатель довольно простой, но прочный и обладает высокой перегрузочной способностью. Он имеет почти постоянную скорость и плохой пусковой крутящий момент.
Асинхронный двигательс короткозамкнутым ротором используется для приводов малой и средней мощности , где регулирование скорости не требуется, например, для водяных насосов, трубчатых колодцев, токарных станков, сверл, шлифовальных машин, полировальных машин, строгальных станков по дереву, вентиляторов, воздуходувок, стиральных машин и компрессоров. и т.п.
Вернуться к Типам двигателей ↑
6. Двигатель с двойной беличьей клеткой
Он имеет высокий пусковой момент, большую перегрузочную способность и почти постоянную скорость.
Двигатель с двойным короткозамкнутым ротором используется для привода нагрузок, требующих высокого пускового момента, таких как компрессорные насосы, поршневые насосы, большие холодильники, дробилки, расточные станки, текстильное оборудование, краны, пуансоны и токарные станки и т. Д.
Двигатель вентилятора с двойным короткозамкнутым ротором — 3 скорости; 110 ВВернуться к типам двигателей ↑
7.Асинхронный двигатель с контактным кольцом
Обладает высоким пусковым моментом и большой перегрузочной способностью. Скорость асинхронного двигателя с контактным кольцом может быть изменена до 50% от его нормальной скорости.
Асинхронный двигатель с контактным кольцомиспользуется для тех промышленных приводов, которые требуют высокого пускового момента и управления скоростью , таких как лифты, насосы, намоточные машины, печатные машины, линейные валы, элеваторы, компрессоры и т. Д.
Асинхронный двигатель с контактным кольцом мощностью 6000 кВт для испытательный стенд компрессора (фото: emz.de)Вернуться к Типам двигателей ↑
8. Однофазный синхронный двигатель
Из-за своей постоянной скорости однофазный синхронный двигатель используется в телепринтерах, часах, всех видах устройств синхронизации, записывающих приборах, звукозаписи и воспроизводящие системы.
Синхронный двигатель / однофазный / IP65 (фото предоставлено directindustry.com)Вернуться к типам двигателей ↑
9. Однофазный серийный двигатель
Он обладает высоким пусковым моментом, и его скорость можно регулировать в широком диапазоне . Однофазный двигатель обычно используется для привода небольших бытовых приборов, таких как холодильники, пылесосы и т. Д.
Однофазный двигатель серии 1,0 кВт; 1000 Вт; 230 ВВернуться к Типам двигателей ↑
10. Отталкивающий двигатель
Обладает высоким пусковым моментом и может регулировать скорость в широких пределах.
Кроме того, имеет высокую скорость при высоких нагрузках. Отталкивающий двигатель обычно используется для приводов, требующих большого пускового момента и регулируемой, но постоянной скорости, как в машинах для намотки катушек.
Вернуться к типам двигателей ↑
11. Индукционный двигатель с конденсаторным пуском
Он имеет довольно постоянную скорость и умеренно высокий пусковой крутящий момент. Управление скоростью невозможно. Асинхронный двигатель с конденсаторным пуском обычно используется для компрессоров, холодильников и небольших переносных подъемников.
Вернуться к Типам двигателей ↑
12. Конденсаторный двигатель запуска и запуска
Его рабочие характеристики аналогичны вышеуказанному двигателю , за исключением того, что он имеет лучший коэффициент мощности и более высокий КПД .Следовательно, электродвигатели с конденсаторным пуском и пуском обычно используются для приводов, требующих бесшумной работы.
Hitachi конденсатор пусковой конденсатор рабочий двигательВернуться к типам двигателей ↑
Ссылка // Справочник ASHRAE: системы отопления, вентиляции и кондиционирования 2004
Типы электродвигателей и их использование
Знание различных типов электродвигателей всегда полезно из-за широкого использования электродвигателей от бытовых до промышленных.Если у вас есть система кондиционирования воздуха дома или вы используете воздушный компрессор на промышленном предприятии, вы используете электродвигатели. Следовательно, если вы знаете о различных типах электродвигателей, вы сможете лучше понять систему, которой владеете, и лучше контролировать ее работу.
Здесь, в Linquip, мы предоставили вам удобную платформу, чтобы вы могли найти тип электродвигателя, который вам нужен для вашего приложения. Кроме того, в этом посте мы пытаемся демистифицировать различные типы электродвигателей для вашей справки.Итак, следите за обновлениями!
Что такое электродвигатели?
Прежде чем узнать о различных типах электродвигателей, лучше начать с вопроса «что такое электродвигатель»? Что ж, самый короткий ответ заключается в том, что электродвигатель или просто двигатель — это электромеханическое устройство, которое получает электрическую энергию и преобразует ее в движение или механическую энергию.
Изображение из проекта по повышению осведомленности о стандартах устройств
Это движение в основном вращательное. Поток электрического тока индуцирует магнитное поле, и в электродвигателе возникает вращательное движение, перпендикулярное направлению тока и магнитного поля.
Применение электродвигателей
Электродвигатели могут использоваться в домашних условиях, например, в электроприборах, таких как кондиционеры, пылесосы, вентиляторы, кухонные комбайны и т. Д., Которые по-своему используют силу вращения электродвигателей или даже в игрушках. например, игрушечные машинки или модели самолетов с дистанционным управлением или управлением через приложение.
Говоря об электрических моделях транспортных средств, более крупные и сложные версии электродвигателей можно найти в электромобилях и самолетах реальных размеров (ну, эти самолеты все еще изучаются, чтобы стать коммерчески доступными).
И последнее, но не менее важное: некоторые типы электродвигателей широко используются в промышленности, например, в промышленных газовых компрессорах, насосах, подъемных транспортных средствах, смесителях и т. Д.
Способы классификации электродвигателей
Различные типы электродвигателей можно классифицировать по-разному. Один из способов классификации основан на их вольерах. У нас есть двигатели Open Drip Proof (ODP), подходящие для чистых, сухих и закрытых помещений, усовершенствованной версией которых являются двигатели с защитой от атмосферных воздействий с конфигурацией корпуса WP1 или WP2.У нас также есть полностью закрытые корпуса с вентиляторным охлаждением (TEFC), полностью закрытые надувные кожухи (TEAO), полностью закрытые с принудительной вентиляцией (TEFV) и полностью закрытые невентилируемые корпуса (TENV) для различных типов электродвигателей. Существуют также взрывозащищенные (Ex) двигатели, используемые во взрывоопасных зонах с возможностью взрыва из-за присутствия некоторых взрывоопасных жидкостей, пыли и т. Д. В этой зоне.
Тем не менее, электродвигатели обычно классифицируют по источнику питания. Существуют двигатели переменного тока или двигатели переменного тока, в которых ток меняет направление с некоторой частотой.Существуют также двигатели постоянного или постоянного тока, которые широко используются в небольших приложениях из-за их легкого регулирования скорости.
Двигатели переменного тока подразделяются на однофазные и трехфазные. Однофазный двигатель может достигать мощности около 3 кВт при питании от однофазного источника питания, что характерно для бытовых и коммерческих приложений. С другой стороны, трехфазный двигатель может производить мощность до 300 кВт. Эти двигатели — идеальный выбор для промышленного применения.
Двигатели переменного тока
Как упоминалось ранее, электродвигатель переменного тока является одним из типов электродвигателей, использующих ток переменного направления. Эти двигатели не так легко регулируются по скорости, как двигатели постоянного тока; однако, с небольшими потерями в мощности, можно использовать двигатели переменного тока с частотно-регулируемыми приводами, чтобы лучше регулировать скорость.
Существует два широко используемых типа двигателей переменного тока и еще один менее распространенный тип:
- Двигатели асинхронные (асинхронные)
В этих типах электродвигателей магнитное поле вращается в статорах, что индуцирует ток в роторе, приводящий к вращению двигателя.Поскольку вращение ротора индуцируется внешним магнитным полем, эти двигатели возбуждаются извне.
В синхронных типах электродвигателей происходит прямое приложение магнитного поля к обмоткам ротора, что имеет свои недостатки и преимущества. Такие двигатели с внутренним возбуждением требуют иных требований к защите и управлению, чем асинхронные двигатели.
Существуют также линейные типы электродвигателей, в которых статор и ротор не вращаются, и поэтому они создают линейную силу вместо крутящего момента.
Асинхронный двигатель
Асинхронный двигатель — это один из типов электродвигателей Elector, который, вероятно, наиболее широко используется в промышленности. Статор намагничивается из-за его подключения к электросети, затем магнитное поле индуцирует напряжение и, следовательно, ток в обмотках ротора, затем индуцированный ток в роторе создает другое магнитное поле, а затем взаимодействие между этими двумя магнитными полями. создает вращающую силу или крутящий момент, приводящий в движение вал двигателя.
Эти двигатели имеют очень простую конструкцию, прочную конструкцию, низкую цену и простоту обслуживания. Они также имеют широкий диапазон номинальной мощности, как уже было сказано, наиболее широко используемые типы электродвигателей. Тем не менее, регулирование скорости непросто без частотно-регулируемого привода, который заставляет двигатель работать с запаздывающим коэффициентом мощности.
Асинхронный двигатель выпускается двух различных типов: асинхронный двигатель с короткозамкнутым ротором , асинхронный двигатель и индукционный двигатель с фазным ротором , .Каждый из этих двигателей также может быть однофазным или трехфазным. Однофазные асинхронные двигатели — менее распространенный тип асинхронных двигателей в промышленности. Сообщается, что трехфазный асинхронный двигатель является одним из типов электродвигателей, который присвоил себе около 70% доли рынка промышленных асинхронных двигателей.
Двигатель с фазным ротором или электродвигатель с контактным кольцом имеет больше витков обмотки, что означает, что он имеет более высокое индуцированное напряжение и более низкий ток, чем асинхронный электродвигатель с короткозамкнутым ротором.Они также могли производить больший пусковой крутящий момент. С другой стороны, их сложнее производить из-за добавленного количества компонентов по сравнению с асинхронными двигателями с короткозамкнутым ротором, что значительно увеличивает их удельную стоимость, а также затраты на их обслуживание.
- Асинхронный двигатель с короткозамкнутым ротором изготовлен из параллельно расположенных токопроводящих шин, закороченных на обоих концах закорачивающими кольцами.
- Однофазные короткозамкнутые асинхронные двигатели имеют одну обмотку статора, и всегда есть какое-то другое устройство, запускающее двигатель.Они идеально подходят для приложений, требующих всего несколько лошадиных сил, например, для бытовой техники. До сих пор они были наиболее широко используемыми для бытовой техники.
- Трехфазные асинхронные двигатели с короткозамкнутым ротором могут справляться с высокими требованиями к мощности; их номинальная мощность может варьироваться от очень небольшой до сотен лошадиных сил. Они тоже самозапускаются. Почти 90% трехфазных асинхронных двигателей, используемых в промышленности, таких как насосы, компрессоры и вентиляторы, относятся к типу с короткозамкнутым ротором.
- Асинхронный двигатель с фазным ротором Асинхронный двигатель имеет распределенную обмотку, состоящую из двух слоев. Причина названия в том, что ротор этих типов электродвигателей намотан на столько же полюсов, сколько и статор. Из-за более высокой стоимости двигатели с фазным ротором рассматриваются в ситуациях, когда требуется высокий пусковой момент.
- Однофазные двигатели с фазным ротором подходят для более высоких номинальных мощностей, чем их аналоги с короткозамкнутым ротором.Они могут довольно комфортно стартовать и могут очень хорошо разгоняться. Некоторые машины, превышающие размеры бытовой техники, могут использовать эти типы электродвигателей, например, в сельском хозяйстве, в небольших воздушных компрессорах, в горнодобывающей промышленности и т. Д.
- Трехфазный ротор с фазным ротором Двигатели используют только 10% трехфазных типов асинхронных двигателей, используемых в промышленности, но имеют хорошие характеристики своих собратьев с короткозамкнутым ротором.
см. Здесь видео о том, как работает асинхронный двигатель.
Синхронные двигатели
В отличие от асинхронных двигателей, синхронные двигатели в основном не запускаются автоматически, несмотря на то, что для некоторых небольших приложений можно найти некоторые самовозбуждающие конфигурации. Создание магнитного поля ротора для электродвигателей этих типов не зависит от тока, а скорость вращения синхронного двигателя привязана к частоте сети. Другими словами, вращение вала синхронных электродвигателей происходит с синхронизацией скорости с частотой питающего тока.
Что делает их интересными для промышленных предприятий с более высокими требованиями к мощности, так это их высокая эффективность преобразования переменного тока в работу и их способность корректировать коэффициент мощности. Это означает, что они могут работать при единичном коэффициенте мощности, что предполагает равенство реальной мощности нагрузки с полной мощностью цепи.
Синхронные двигатели переменного тока бывают двух типов: без возбуждения и с возбуждением постоянным током. Синхронные электродвигатели без возбуждения подразделяются на три категории: с постоянным магнитом, с реактивным сопротивлением и с гистерезисом.
Двигатели синхронные без возбуждения
Электродвигатели синхронного типа без возбуждения спроектированы таким образом, чтобы их ротор следовал за синхронизированным вращающимся полем на разных этапах, что создавало бы постоянное поле. Когда ротор синхронных двигателей без возбуждения вращается, он взаимодействует со статором. Взаимодействие между полюсами поля статора и ротором приводит к тому, что ротор становится электромагнитным с северным и южным полюсами. Ротор этих типов электродвигателей обладает высокой удерживающей способностью, что означает, что он обладает высокой способностью удерживать или сопротивляться намагничиванию.
Как уже упоминалось, существует три типа синхронных двигателей без возбуждения, а именно синхронные двигатели с постоянным магнитом, реактивные и гистерезисные синхронные двигатели. Давайте обсудим их далее.
Постоянный магнит
В синхронных типах электродвигателей с постоянными магнитами стальной ротор прикреплен к постоянному магниту, например неодимовому магниту, который обеспечивает непрерывное непрерывное магнитное поле. Это реализуется посредством взаимодействия ротора с вращающимся полем, создаваемым статором, к которому подключен источник переменного тока.Постоянная часть ротора привязана к вращающемуся полю статора, что обеспечивает синхронную скорость вращения ротора. Эта конструкция похожа на бесщеточные двигатели постоянного тока, которые будут рассмотрены позже.
Для запуска этих типов электродвигателей необходим источник переменной частоты, поскольку ротор в этой конструкции представляет собой постоянный магнит, создающий постоянное магнитное поле. Управление скоростью осуществляется с использованием прямого управления крутящим моментом и управления с ориентацией на поле.
Сопротивление
Ротор реактивных синхронных электродвигателей, не имеющий обмоток, изготовлен из ферромагнитного материала, на котором наведены непостоянные магнитные полюса. Причина названия в том, что он генерирует крутящий момент, используя магнитное сопротивление, то есть которое является мерой сопротивления или сопротивления материала магнитному потоку.
Изображение из ABB Group
Число полюсов ротора реактивных синхронных двигателей равно числу полюсов статора.Число полюсов всегда четное и обычно равно четырем или шести. Однако количество полюсов ротора меньше количества полюсов статора, чтобы предотвратить колебания крутящего момента. Пульсация крутящего момента — это периодическое увеличение и уменьшение крутящего момента, создаваемого валом двигателя, что не очень хорошо.
Когда ротор статора находится под напряжением, на ротор действует крутящий момент в направлении уменьшения магнитного сопротивления. Этот крутящий момент будет тянуть ближайший к ротору усилие, так что он будет выровнен с полем статора в положение с меньшим сопротивлением.Следовательно, чтобы поддерживать вращение, полюс статора должен постоянно выходить из полюса ротора, вращаясь впереди полюсов ротора.
Гистерезис
Для гистерезисных синхронных двигателей, когда магнитное поле статора вращается, ротор испытывает обратное магнитное поле. Причина этого явления в том, что цилиндрический ротор этих типов электродвигателей изготовлен из материала с высокой коэрцитивной силой. Это означает, что как только ротор намагничен в каком-то направлении, вы не сможете легко изменить его направление, не применяя большое обратное магнитное поле.
Изображение из Elprocus
Обратное магнитное поле, испытываемое каждым небольшим объемом ротора из-за вращения магнитного поля статора, будет продолжаться до тех пор, пока не будет достигнута синхронная скорость. Это дает нам преимущество синхронных двигателей с гистерезисом, которые могут создавать постоянный крутящий момент до достижения синхронной скорости без пульсаций крутящего момента. Еще один момент, связанный с этими типами двигателей, заключается в том, что, несмотря на то, что обычно имеется короткозамкнутая обмотка для запуска двигателя, двигатель может запускаться самостоятельно из-за того, что движение ротора зависит только от фазовой задержки между статором и магнитным полем ротора. поля.
Двигатели синхронные с возбуждением постоянным током
Ротор этих типов электродвигателей возбуждается с помощью внешнего источника постоянного тока, который создает магнитный поток, необходимый для приведения ротора в движение. Это можно сделать с помощью отдельного источника постоянного тока или источника, напрямую подключенного к валу двигателя.
Вы можете посмотреть видео здесь, чтобы увидеть, как работают синхронные двигатели.
Линейный
Линейные двигатели — это один из типов электродвигателей переменного тока, создающих линейную силу вместо крутящего момента.Они похожи на те, что уже обсуждались ранее, за исключением того, что их роторы и статоры развернуты. Они широко используются в электропоездах, приводах, используемых в раздвижных дверях и т. Д.
Это видео покажет вам, как работают такие моторы.
Двигатели постоянного тока
В электродвигателях постоянного тока электрическая энергия постоянного тока преобразуется в механическую. Двигатели постоянного тока могут быть с самовозбуждением или с отдельным возбуждением. Однако двигатели постоянного тока с самовозбуждением, вероятно, более интересны, если вы можете использовать их в своих приложениях.
Двигатели постоянного токатакже можно классифицировать в зависимости от того, являются ли они щеточными двигателями постоянного тока (BDC) или бесщеточными двигателями постоянного тока (BLDC). Щеточные двигатели постоянного тока дешевы и просты в разработке и производстве; однако двигатели BLDC сложны и дороги. В целом, небольшие и малочувствительные приложения, такие как электроприборы, электрические стеклоподъемники и сиденья автомобилей, могут использовать двигатели BDC, тогда как такие приложения, как HVAC и охлаждение, автомобильные электродвигатели и другие подобные промышленные системы, будут работать с BLDC.
Матовый DC
Электродвигатели постоянного тока с щеточным покрытием имеют внутреннюю коммутацию, что означает, что крутящий момент создается непосредственно из мощности постоянного тока, подаваемой с помощью стационарных постоянных магнитов или электромагнитов и вращающихся электромагнитов.
Достаточно недорогие и очень надежные. Вы можете легко контролировать их скорость, используя простую двухпроводную систему, хотя есть некоторые конструкции с фиксированной скоростью, для которых нет управления скоростью.
У щеточных электродвигателей постоянного тока также могут быть некоторые недостатки, такие как необходимость периодического обслуживания, в частности, связанного с щетками, и малый срок службы для сложных работ, для которых высоки крутящий момент или скорость. Другой важной проблемой является их ограниченная скорость из-за щеток и генерации электромагнитных помех (EMI) из-за искрения щеток.
Изображение из ZGC Motor
Шунтирующая рана
Катушки возбуждения или обмотки электродвигателей постоянного тока с шунтирующей обмоткой подключены параллельно якорю; отсюда и название этих типов электродвигателей. В этой конфигурации обмоток подаваемый ток будет распределяться между шунтирующим якорем и обмотками возбуждения. С двигателями BDC с параллельной обмоткой регулировать скорость очень просто.
Когда нагрузка прикладывается к электродвигателям постоянного тока с шунтирующей обмоткой и щеточным электродам, скорость имеет тенденцию к снижению, но в этой ситуации сетевое напряжение будет увеличиваться.Когда сетевое напряжение увеличивается, ток якоря увеличивается, а это означает, что будет генерироваться некоторый дополнительный крутящий момент, который компенсирует снижение скорости из-за приложения нагрузки, что делает эти типы электродвигателей устройствами с постоянной скоростью.
Все это означает, что вы, вероятно, захотите рассмотреть такой двигатель, если бы у вас были низкие требования к пусковому крутящему моменту, а также хорошее регулирование скорости.
Серия Рана
Если вместо параллельного соединения обмоток якоря и обмоток возбуждения последовательно, то получится щеточный электродвигатель постоянного тока с последовательной обмоткой.Понятно, что ток в обмотках возбуждения и якоря для этой конструкции будет одинаковым. Им потребуется значительный ток, но крутящий момент, который они создают, очень высок, особенно при запуске.
Однако эта конструкция не очень хороша с регулированием скорости. Причина в том, что, несмотря на повышенное напряжение из-за нагрузки, двигатель будет увеличивать ток для нарастания, но магнитное поле в конечном итоге станет насыщенным, что означает, что магнитный поток между якорем и статором не будет расти достаточно быстро, что означает недостаточный крутящий момент. будет сгенерирован, чтобы вернуть скорость к предыдущим условиям.
Можно сказать, что вы могли бы рассмотреть типы электродвигателей, когда вам нужен высокий пусковой крутящий момент, но не слишком заботитесь о регулировании скорости.
Сложная рана
Что делать, если вам нужен BDC с высоким пусковым моментом и хорошим контролем скорости? Что ж, для этого тоже есть решение: электродвигатели постоянного тока со сложной обмоткой и щеткой. Двигатели с комбинированной обмоткой — это «гибрид» двигателей постоянного тока с шунтирующей обмоткой и щеточных двигателей с последовательной обмоткой. В этих типах электродвигателей имеется обмотка возбуждения, включенная последовательно с обмоткой якоря, и еще одна обмотка возбуждения, шунтирующая с обмоткой якоря.
Существует конфигурация с коротким шунтом и конфигурация с длинным шунтом для двигателей BDC с комбинированной обмоткой. Если бы поле шунта было только параллельно якорю, это была бы конфигурация с коротким шунтом, но если бы поле шунта было параллельно с последовательностью якоря и последовательным полем, это был бы BDF с составной обмоткой с длинным шунтом.
У вас может быть полярность шунтирующего поля, совпадающая с полярностью последовательного поля, что создает совокупную составную обмотку BDC. Это двигатель с высоким пусковым моментом и хорошей регулировкой скорости.У вас также может быть полярность шунтирующего поля, противоположная последовательному полю, что делает дифференциальный двигатель с составной обмоткой.
Постоянный магнит
В щеточном двигателе постоянного тока с постоянными магнитами якорь окружен постоянными магнитами, прикрепленными к внутренней поверхности цилиндрического статора этих типов электродвигателей. Магниты установлены таким образом, чтобы противоположные полюса соседних магнитов были обращены к якорю. Якорь, который является проводником с током, будет поэтому испытывать механическую силу, действующую на него со стороны магнитного поля этой системы постоянных магнитов, и вращаться в его направлении.
Серводвигатель
Серводвигателимогут не относиться к одному из типов электродвигателей и, вероятно, представляют собой отдельную категорию, но, поскольку в самых простых небольших из них используются двигатели BDC с постоянными магнитами вместе с системой управления с обратной связью, мы решили упомянуть их здесь как хорошо. Серводвигатели — это механические устройства или приводы, которые очень удобны, когда дело доходит до точного управления положением, скоростью или ускорением. Они состоят из двигателя постоянного тока, датчика положения и контроллера.
Бесщеточный DC
Вы наверняка заметили, что щетки и их взаимодействие с механическим коммутатором двигателей BDC являются причиной появления бесщеточных электродвигателей постоянного тока. Что ж, щетки изнашиваются и требуют обслуживания и замены, а щетки создают искры, которые опасны для мест, где есть вероятность взрыва.
Бесщеточные двигатели постоянного токакоммутируются с помощью электроники, что обеспечивает им более длительный срок службы, лучшие характеристики скорости и крутящего момента, высокую эффективность, лучший динамический отклик и более высокие изменения скорости, а также бесшумную работу.
Эти типы электродвигателей могут использоваться как для приложений с переменной нагрузкой, так и с фиксированной нагрузкой, а также для приложений позиционирования, и они набирают популярность на рынке.
Видео, в котором сравниваются щеточные двигатели постоянного тока с бесщеточными двигателями постоянного тока, и критерии выбора между ними см. Здесь.
Типы электродвигателей — Thomson Lamination Company, Inc.
Электродвигателиможно найти во многих сферах применения: от обычных предметов домашнего обихода до различных видов транспорта и даже передовых аэрокосмических приложений.Здесь мы делимся руководством, которое поможет вам лучше понять доступные варианты.
Электродвигатели и генераторы
Электродвигатели и генераторы представляют собой электромагнитные устройства с обмоткой якоря или ротором, который вращается внутри обмотки возбуждения или статора; однако у них противоположные функции. Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую.
Два типа электродвигателей
Обмотка возбуждения в электродвигателях обеспечивает электрический ток для создания фиксированного магнитного поля, которое обмотка якоря использует для создания крутящего момента на валу электродвигателя.Различия между различными типами электродвигателей связаны с их уникальной работой, напряжением и требованиями к применению. Существует как минимум дюжина различных типов электродвигателей, но есть две основные классификации: переменного тока (AC) или постоянного тока (DC). То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом для создания механической силы, создает дополнительные различия в каждой из этих классификаций.
Двигатели постоянного тока
Матовые двигателиЩеточные двигатели состоят из четырех основных компонентов:
- Статор
- Ротор или якорь
- Кисти
- Коммутатор
Существует четыре основных типа щеточных двигателей, в том числе:
- Двигатели серии . Статор включен последовательно или идентичен ротору, поэтому их токи возбуждения идентичны. Характеристики: используется в кранах и лебедках, большой крутящий момент на низкой скорости, ограниченный крутящий момент на высокой скорости.
- Параллельные двигатели. Катушка возбуждения параллельна (шунтируется) ротору, благодаря чему ток двигателя равен сумме двух токов. Характеристики: используется в промышленности и автомобилестроении, отличное управление скоростью, высокий / постоянный крутящий момент на низких скоростях.
- Кумулятивные составные двигатели. Этот тип сочетает в себе аспекты как последовательного, так и закрытого типов, делая ток двигателя равным сумме последовательных и шунтирующих токов поля. Характеристики: используется в промышленности и автомобилестроении, объединяет преимущества как серийных, так и параллельных двигателей.
- Двигатели постоянного тока (постоянный магнит). Самый распространенный тип щеточных электродвигателей, электродвигатели с постоянным постоянным током, в которых для создания поля статора используются постоянные магниты. Характеристики: используется в коммерческом производстве игрушек и бытовой техники, дешевле в производстве, хороший крутящий момент на нижнем конце, ограниченный крутящий момент на верхнем конце.
Двигатели категории бесколлекторных не имеют коллектора и щеток. Вместо этого ротор представляет собой постоянный магнит, а катушки находятся на статоре. Вместо того, чтобы управлять магнитными полями на роторе, бесщеточные двигатели управляют магнитными полями статора, регулируя величину и направление тока в катушках. Одним из основных преимуществ бесщеточных двигателей является их эффективность, которая позволяет лучше контролировать и производить крутящий момент в более компактной сборке.
Двигатели переменного тока
Двигатели, относящиеся к классификации двигателей переменного тока, бывают синхронными или асинхронными, в первую очередь различаются скоростью ротора относительно скорости статора. Скорость ротора относительно статора в синхронном двигателе равна, но скорость ротора меньше, чем его синхронная скорость в асинхронном двигателе. Кроме того, синхронные двигатели имеют нулевое скольжение и требуют дополнительного источника питания, в то время как асинхронные или асинхронные двигатели имеют скольжение и не требуют вторичного источника питания.
Синхронный двигательСинхронный двигатель — это машина с двойным возбуждением, то есть он имеет два электрических входа. В обычном трехфазном синхронном двигателе один вход, обычно трехфазный переменный ток, питает обмотку статора, создавая трехфазный вращающийся магнитный поток. Питание ротора обычно осуществляется постоянным током, который возбуждает или запускает ротор. Как только поле ротора сцепляется с полем статора, двигатель становится синхронным.
Асинхронный (индукционный)В отличие от синхронных двигателей, асинхронные двигатели позволяют запускать асинхронные двигатели, подавая питание на статор без подачи питания на ротор.Асинхронные двигатели имеют конструкцию с возбуждением или с короткозамкнутым ротором. Вот некоторые примеры асинхронных асинхронных двигателей:
- Индукционные двигатели с конденсаторным пуском. Это однофазный двигатель с ротором с сепаратором и двумя обмотками статора, запускаемый конденсатором. Их использование включает компрессоры и насосы в холодильниках и системах переменного тока с частым запуском и остановом.
- Асинхронные двигатели с короткозамкнутым ротором. Трехфазное питание создает магнитное поле в обмотке статора в этом двигателе, который включает в себя ротор с короткозамкнутым ротором, сделанный из листовой стали с высокой проводимостью.Это недорогие, низкие эксплуатационные расходы и высокоэффективные двигатели, используемые в центробежных насосах, промышленных приводах, больших нагнетателях и вентиляторах, станках, токарных станках и другом токарном оборудовании.
- Двигатели с двойным короткозамкнутым ротором. Эти двигатели решают проблемы с низким пусковым моментом в двигателях с короткозамкнутым ротором. Их конструкция уравновешивает отношение реактивного сопротивления к сопротивлению между внешней и внутренней клеткой, увеличивая пусковой крутящий момент при сохранении общей эффективности.
Нажмите, чтобы развернуть
Идентификация электродвигателя
Выбор двигателя, наиболее подходящего для конкретного применения, зависит от четырех характеристик:
- Мощность и скорость
- Рама двигателя
- Требования к напряжению
- Корпуса и монтажные позиции
Металлическая паспортная табличка, прикрепленная к двигателю, содержит важную информацию, относящуюся к этим характеристикам, за исключением информации о корпусе.
Номинальная мощность и скорость электродвигателя
И номинальная мощность, и номинальная скорость вращения (об / мин) должны соответствовать требованиям к нагрузке для установленного приложения. Двигатели бывают разных категорий мощности, в том числе: дробные двигатели (от 1/20 до 1 л.с.), встроенные двигатели (от 1 до 400 л.с.) и большие двигатели (от 100 до 50 000 л.с.). Номинальные значения частоты вращения включают 3600 об / мин (2 полюса), 1800 об / мин (4 полюса) и 1200 об / мин (6 полюсов).
Рама электродвигателя
Размер рамы двигателя не указывает на его рабочие характеристики, особенно на номинальную мощность в лошадиных силах.Национальная ассоциация производителей электрооборудования (NEMA) разработала номера корпусов, соответствующие монтажным размерам, с их цифрами, относящимися к их размеру «D» или расстоянию от центра вала до центра нижней части крепления. Как правило, двухзначные метки предназначены для дробных двигателей, но в них могут быть встроены двигатели большей мощности.
Требования к напряжению
Напряжение, частота и фаза — все это часть требований к напряжению. В большинстве случаев в Северной Америке и Европе трехфазные двигатели оснащены дисплеями с двойным напряжением, например 230/460.Стандартная рабочая частота для большинства электродвигателей составляет 60 Гц, хотя в Европе распространены двигатели с частотой 50 Гц. Это изменение в герцах указывает на то, что двигатель будет работать со скоростью 5/6 от нормальной скорости вращения. Фаза — это последний бит информации, включенный в требования к напряжению двигателя, указывающий тип требуемого источника питания, например трехфазный, однофазный и постоянный ток.
Корпуса и монтажные позиции
Информация о корпусе зависит от среды, в которой установлен двигатель.Есть две основные категории корпусов — открытые двигатели и закрытые двигатели.
Открытые двигателиОткрытые двигатели применяются в относительно чистых и сухих помещениях, что важно, поскольку открытые кожухи двигателей обеспечивают циркуляцию воздуха через обмотки.
Закрытые двигателиЭти типы не допускают свободного воздухообмена между внешней и внутренней частью двигателя. Различия в герметичности корпуса и характеристиках охлаждения дополнительно различают двигатели закрытого типа, в том числе:
- Полностью закрытый вентилятор с охлаждением (TEFC)
- Полностью закрытые, невентилируемые (TENV)
- Полностью закрытый воздуховод (TEAO)
- Полностью закрытая промывка (TEWD)
- Взрывозащищенные корпуса (EXPL)
- Опасная зона (HAZ)
Найдите электродвигатель, наиболее подходящий для вашего применения
Thomson Lamination Company — ведущий производитель штампованных компонентов для ламинирования двигателей, способный производить большие партии пластин ротора и статора из металлов с высокой проводимостью.
Ознакомьтесь с нашими возможностями по производству ламинации или свяжитесь с нами, чтобы узнать больше о наших решениях для ламинирования с электродвигателем.
Сколько типов двигателей существует?
Электродвигатели играют жизненно важную роль в промышленности, бизнесе и домах в 21 -м -м веке. Стремление к более экологичным устойчивым технологиям все чаще приводит к инновациям и изменениям в простом электродвигателе. Каждый двигатель имеет определенное применение. Базовые двигатели подразделяются на три различных типа: двигатели переменного тока, двигатели постоянного тока и специализированные двигатели.
Основные сведения о электродвигателях переменного тока Двигатели переменного токавключают как синхронный, так и асинхронный двигатель. Простая функция электродвигателя остается аналогичной. Синхронные двигатели используются как для роботов, так и для автоматизации. Точность синхронного двигателя остается высокой.
В асинхронном двигателе используется электромагнитная индукция. Основные характеристики асинхронного двигателя включают невысокую стоимость, небольшие затраты на техническое обслуживание, высокую надежность и прочную конструкцию. Асинхронные двигатели используются в коммерческих, жилых и промышленных помещениях.Асинхронный двигатель может использоваться для:
- Станки сверлильные
- Миксеры
- Игрушки
- Насосы
- Компрессоры
- Пылесосы
- Вентиляторы малые
Они имеют множество применений. LN Electric Motors может помочь вам найти подходящие двигатели переменного тока, которые вам нужны. Если вам нужен новый двигатель или замена и ремонт, наши опытные профессионалы будут рады вам помочь.
Двигатели постоянного тока Типы двигателей постоянного токавключают двигатели с комбинированной обмоткой, двигатели с постоянным постоянным током, серийные и параллельные двигатели.Параллельные двигатели постоянного тока используются в лифтах, токарных станках, ткацких станках и промышленных инструментах. Некоторые двигатели серии постоянного тока имеют недостатки, ограничивающие использование. Они работают с крошечными электроприборами, лебедками и подъемниками. Есть и другие приложения для мобильного электрооборудования. Позвоните нашим специалистам по электродвигателям сегодня и узнайте, какой электродвигатель постоянного тока будет соответствовать вашим потребностям.
Двигатели специального назначения, такие как линейный асинхронный двигатель или серводвигатель, имеют другое применение, чем двигатель переменного тока или двигатель постоянного тока.Шаговый двигатель используется, в том числе:
- Плоттеры
- Изготовление схем
- Генераторы обычного движения
- Инструменты для управления процессами
Бесщеточный двигатель постоянного тока имеет лучшие характеристики, чем щеточные двигатели постоянного тока, но имеет меньшую производительность по сравнению с двигателями переменного тока. Другие специализированные двигатели включают двигатель с гистерезисом, двигатель сопротивления и универсальный двигатель. Каждый служит определенной цели.
Нужна помощь в поиске двигателя, подходящего для ваших нужд? Вам необходимо заменить или отремонтировать старый электродвигатель? Позвоните нашим дружелюбным сотрудникам LN Electric Motors.Мы здесь чтобы помочь вам. Свяжитесь с нами сегодня. Наша опытная команда поможет вам найти идеальный мотор для вашего проекта и бюджета.
Двигатели переменного и постоянного тока: различия и преимущества
Электродвигатели играют важную роль почти во всех отраслях промышленности. Использование двигателя правильного типа с высококачественными деталями и регулярным обслуживанием обеспечивает бесперебойную работу вашего предприятия и предотвращает повреждение оконечного оборудования из-за износа или скачков напряжения.
Gainesville Industrial Electric может помочь вашей компании выбрать правильные промышленные электродвигатели и детали для ваших приложений.
A Primer on Electric Motors
Электродвигатели — это машины, которые преобразуют электрическую энергию — из накопленной мощности или прямого электрического соединения — в механическую энергию за счет создания вращательной силы. Два основных типа электродвигателей :
- Двигатели переменного тока , которые питаются от переменного тока
- Двигатели постоянного тока , которые питаются постоянным током
Как работают электродвигатели
И переменного тока, и Электродвигатели постоянного тока используют электрический ток для создания вращающихся магнитных полей, которые, в свою очередь, создают вращательную механическую силу в якоре, расположенном на роторе или статоре, вокруг вала.В различных конструкциях двигателей используется одна и та же базовая концепция для преобразования электрической энергии в мощные всплески силы и обеспечения динамических уровней скорости или мощности.
Компоненты главного двигателя
Хотя электродвигатели могут отличаться от одной конструкции или типа к другому, многие из них содержат следующие деталей и узлов (расположены от центра, направленного наружу):
- Вал центрального двигателя
- Обмотки
- Подшипники (для уменьшения трения и износа)
- Якорь (расположен на роторе, вращающейся части или статоре, неподвижной части)
- Щетки (в двигателях постоянного тока)
- Клеммы
- Рама и торцевые щиты
Типы электродвигателей: AC vs.Двигатели постоянного тока
Двигатели переменного и постоянного тока — это широкие категории двигателей, которые включают меньшие подтипы. Например, асинхронные двигатели, линейные двигатели и синхронные двигатели — это все типы двигателей переменного тока. Двигатели переменного тока также могут включать в себя частотно-регулируемые приводы для управления скоростью и крутящим моментом двигателя, в то время как двигатели постоянного тока доступны в моделях с самовозбуждением и с раздельным возбуждением.
Привод с регулируемой скоростью переменного тока
Двигатель переменного тока по сравнению с двигателем постоянного тока Преимущества
Каждый тип двигателя имеет различные преимущества, которые делают их наиболее подходящими для различных коммерческих и промышленных применений.Например, двигатели переменного тока отличаются гибкостью и простотой управления. Некоторые из их других преимуществ включают:
- Низкие требования к пусковой мощности, которые также защищают компоненты на принимающей стороне
- Контролируемые уровни пускового тока и ускорения
- Надстройки VFD или VSD, которые могут управлять скоростью и крутящим моментом на разных этапах используйте
- Высокая надежность и более длительный срок службы
- Возможности для многофазных конфигураций
Двигатели постоянного тока также обладают собственными преимуществами , такими как:
- Более простая установка и обслуживание
- Высокая пусковая мощность и крутящий момент
- Быстрое время отклика на запуск, остановку и ускорение
- Доступность для нескольких стандартных напряжений
Какой двигатель более мощный: переменного или постоянного тока?
Двигатели переменного тока обычно считаются более мощными, чем двигатели постоянного тока, поскольку они могут создавать более высокий крутящий момент за счет использования более мощного тока.Однако двигатели постоянного тока обычно более эффективны и лучше используют входную энергию. Двигатели переменного и постоянного тока бывают разных размеров и мощностей, которые могут удовлетворить любые отраслевые требования к питанию.
Применение двигателей переменного и постоянного тока
Двигатели переменного и постоянного тока находят применение в технологических процессах и объектах практически во всех отраслях промышленности. Некоторые из наиболее распространенных промышленных приложений для двигателей переменного тока включают:
- Приборы
- Приводы и системы компрессоров
- Компьютеры
- Конвейерные системы
- Вентиляторы и кондиционеры
- Гидравлические и ирригационные насосы
- Транспортное оборудование
Типичные промышленные применения двигателей постоянного тока включают:
- Производство и производственные единицы
- Оборудование, требующее постоянной мощности, такое как пылесосы, лифты и швейные машины
- Складское сортировочное оборудование
Выбор правильного электрического Электродвигатель для вашего промышленного применения
Установка и обслуживание правильных электродвигателей на предприятиях и оборудовании вашей компании является важным шагом к обеспечению бесперебойной работы и производства.
Gainesville Industrial Electric продает и обслуживает двигатели переменного и постоянного тока, запчасти и многое другое. Мы также являемся авторизованным заводским гарантийным центром. Чтобы получить помощь в выборе подходящего электродвигателя или промышленной сборки для вашего применения, свяжитесь с нами или запросите дополнительную информацию сегодня, чтобы получить ценовое предложение.
Соответствующее содержание:
Стандартные типы промышленных двигателей | Центр энергоэффективности
AC индукционный / асинхронный
Большинство промышленных двигателей представляют собой асинхронные двигатели трехфазного переменного тока из-за их надежности и низкой стоимости.
В этом случае электрический ток в обмотке статора создает вращающееся магнитное поле, которое «индуцирует» (отсюда и название) электрический ток в роторе. Ток, индуцируемый в роторе, создает магнитное поле, которое противодействует полю статора, вызывая вращение в роторе. Асинхронный двигатель должен работать со скоростью, немного меньшей, чем синхронная, поскольку вращение с синхронной скоростью не приведет к возникновению индуцированного тока ротора.
Вот почему асинхронные двигатели называются асинхронными, потому что ротор вращается медленнее, чем вращающееся магнитное поле статора, создавая крутящий момент вокруг выходного вала.
Если ротор вращается быстрее, чем вращающееся магнитное поле статора, в статоре будет индуцироваться ток. В этом сценарии асинхронные двигатели могут действовать как генераторы.
Асинхронные двигатели недороги, потому что для их работы требуются только электромагниты в статоре и роторе. Они также надежны, потому что им не нужны коммутаторы для передачи тока на ротор, что снижает вероятность искрения и износа от трения.
Большинство промышленных предприятий используют асинхронные двигатели из-за их желаемых характеристик, таких как надежность, простота и доступность.
Асинхронный двигатель с короткозамкнутым ротором ( Википедия, )
AC синхронный
В синхронных двигателях вращение вала синхронизируется с частотой тока, подаваемого на двигатель. Статор двигателя содержит электромагниты, которые создают магнитное поле, которое вращается в соответствии с характеристиками приложенного к нему тока. Ротор содержит постоянные магниты или электромагниты, которые противодействуют магнитному полю, создаваемому в роторе, вызывая вращение вала.Ротор требует физического подключения к электроэнергии с помощью коммутатора, обычно состоящего из токопроводящей щетки, которая может изнашиваться при использовании.
Эти двигатели называются синхронными, потому что ротор вращается с той же скоростью, что и вращающееся магнитное поле статора.
Хотя синхронные двигатели переменного тока используются реже из-за более высокой стоимости, они обладают более высокой энергоэффективностью, чем асинхронные двигатели переменного тока.
Синхронные двигатели переменного тока уникальны тем, что могут использоваться для корректировки коэффициента мощности промышленного объекта.
Векторы магнитного поля синхронного двигателя ( Википедия )
DC синхронный
Двигатели постоянного тока — наименее распространенный тип двигателей, на смену которым пришли современные двигатели переменного тока.
Статор создает статическое магнитное поле, а ротор создает вращающееся магнитное поле, питаемое от коммутатора.
В результате магнитное поле ротора пытается выровняться с магнитным полем статора, которое создает крутящий момент на выходном валу.
Вместо того, чтобы использовать электромагниты для создания статического магнитного поля, двигатели постоянного тока с постоянными магнитами используют магниты для создания поля. Поскольку магнитное поле присутствует всегда, независимо от состояния питания двигателя, двигатели с постоянными магнитами могут притягивать другие близлежащие ферромагнитные материалы, создавая потенциальный риск в промышленных условиях.
Двигатели постоянного тока с постоянными магнитами также тяжелее и громоздче из-за использования магнитов в статоре.
Анимация работающего двигателя постоянного тока ( Википедия, )
Руководство по моторным приводам | Двигатели переменного, постоянного тока, шаговые и серводвигатели
Содержание
Что такое моторные приводы?
Какие типы контроллеров двигателей и приводов?
Привод постоянного тока
Типы двигателей, в которых используются приводы постоянного тока, и их применение
Привод переменного тока
Типы двигателей, в которых используются приводы переменного тока, и их применение
Приводы и контроллеры серводвигателей
Приложения для серводвигателей
Шаговый двигатель
Приложения для шагового двигателя
Нужны ваши приводы двигателей Отремонтированный
Моторные приводы бывают самых разных форм.Эти электронные или электрические устройства используются для питания ряда машин, роботов, оборудования и других приложений. Если вы собираетесь приобрести новые моторные приводы или отремонтировать старые, вам необходимо знать, что такое моторные приводы, а также различные типы приводов и то, как они обычно используются.
Что такое моторные приводы?
Моторные приводы — это электронные устройства, управляющие крутящим моментом, выходными сигналами положения и скоростью двигателя. Когда мощность поступает в двигатель, привод изменяет ее, чтобы ваш двигатель имел необходимую мощность.Термины «контроллеры двигателей» и «приводы двигателей» часто используются как взаимозаменяемые, поскольку схемы контроллера обычно комбинируются со схемами привода для создания единого блока.
Какие типы контроллеров двигателей и приводов?
Сегодня широко распространены несколько различных типов двигателей и моторных приводов. Доступны четыре основных типа моторных приводов: шаговый, переменный, постоянный и сервопривод. Каждый из этих моторных приводов имеет типы входной мощности, адаптированные к функциям вывода их приложений.Узнайте больше о том, что делают приводы в этих двигателях и как они обычно используются, ниже:
1. Привод постоянного тока
В своей основной функции привод постоянного тока преобразует переменный ток (AC) в постоянный ток (DC) для питания двигателя постоянного тока. Приводы постоянного тока — это силовые модули, которые служат интерфейсом между двигателем постоянного тока и контроллером. Часто двигатель поставляется с контроллером, встроенным в схему привода, помогая запитать управляющие сигналы, которые передаются с приводом.
Существует несколько различных типов приводов двигателей постоянного тока, причем наиболее распространенный тип привода поставляется с двумя тиристорами (выпрямителями с кремниевым управлением), которые используют однофазный вход переменного тока для генерации выходного полупериода постоянного тока.Этот тип выработки энергии называется методом полумоста. Более сложные и мощные приводы постоянного тока включают шесть SCRS для использования метода полного моста. При использовании метода полного моста шесть тиристоров будут использовать трехфазный вход переменного тока для генерации выхода постоянного тока.
Иногда приводы постоянного тока называют приводами с регулируемой скоростью. Они получили это название из-за того, как большинство типов приводов постоянного тока регулируют скорость вала. Привод постоянного тока обычно характеризуется надежным регулированием скорости, широким диапазоном скоростей и тем, как привод передает напряжение на двигатель.
Типы двигателей, в которых используются приводы постоянного тока, и их применение
Существует множество двигателей постоянного тока, использующих приводы постоянного тока. Все эти двигатели используют одну и ту же операцию для их питания, при этом вращение двигателя происходит от приложения мощности через проводники с током, которые установлены внутри магнитного поля. Различия между двигателями постоянного тока возникают, если посмотреть, как и где создаются электромагнитные поля. Чтобы дать вам представление о том, где вы можете ожидать использования двигателя постоянного тока, взгляните на некоторые из основных типов ниже:
Линейные двигатели
Линейные двигатели, как следует из их названия, создают силы только в одном направлении.Они создают механическую силу через постоянные редкоземельные магниты, которые генерируют магнитный поток, который затем взаимодействует с током в проводниках. Линейные двигатели могут быстро ускоряться, позиционироваться с большой точностью и работать на высоких скоростях.
Линейные двигатели можно встретить в различных типах оборудования. Их способность помогать с контролем скорости делает их особенно полезными для приложений, где точная скорость является приоритетом. Они используются в ткацких станках, раздвижных дверях и машинах для обработки багажа.Кроме того, их часто устанавливают на американских горках, чтобы помочь с ускорением и контролем скорости.
Матовые двигатели
Щеточный двигатель — это тип привода постоянного тока, который использует физическое прикосновение для коммутации и производства механической энергии. Щетки в двигателе изготовлены из угля или других материалов, которые используются в качестве электрических контактов. Во время вращения вала подпружиненные щетки контактируют с коммутатором. По сути, щетки двигателя помогают источнику питания постоянного тока подключаться к ротору в сборе, который содержит выходной вал, коллекторные кольца и якорь.
Эти щеточные двигатели существуют уже более века, и компании и частные лица до сих пор доверяют им из-за их значительного отношения крутящего момента к инерции. Они известны своей надежностью и доступностью. Часто можно встретить щеточные двигатели, используемые в транспортных средствах для управления электрическими стеклоподъемниками, дворниками и регуляторами положения сидений. Они также используются в насосах с батарейным питанием, в рентгеновском и сварочном оборудовании. В более промышленных условиях щеточные двигатели используются в промышленном оборудовании, требующем быстрых всплесков мощности.
Бесщеточные двигатели
В отличие от щеточных двигателей, бесщеточные двигатели не используют физическое прикосновение для коммутации. Как и следовало ожидать, они не используют кисти для создания движения. Вместо этого они используют магниты, размещенные вокруг ротора, которые затем притягиваются к обмоткам катушки статора. В результате такой конструкции двигатель создает свой крутящий момент с помощью электромагнетизма. Скорость вращения двигателя можно регулировать, просто изменяя направление и величину тока, содержащегося в катушках статора.
Благодаря своей эффективности и долговечности, бесщеточные двигатели постоянного тока лучше всего использовать в приложениях, где двигатель должен работать в течение длительного периода. Некоторые примеры приложений включают жесткие диски, стиральные машины, компьютерные вентиляторы и кондиционеры.
2. Привод переменного тока
Привод переменного тока преобразует входной переменный ток в постоянный, так же, как привод постоянного тока. Однако после завершения этого первого преобразования постоянный ток снова преобразуется в переменный, питающий двигатель. По сути, приводы переменного тока представляют собой преобразователи частоты или усилители, которые служат интерфейсом между двигателем переменного тока и контроллером.Приводы обеспечивают совместимость напряжения с двигателем путем преобразования входных сигналов шага и направления контроллера в соответствующее напряжение.
Иногда приводы переменного тока называют приводами переменной частоты, поскольку большинство приводов двигателей переменного тока регулируют входную частоту. Какими бы именами вы их ни называли, функция привода переменного тока остается прежней: привод переменного тока регулирует крутящий момент двигателя и выходную скорость.
Типы двигателей, в которых используются приводы переменного тока, и их применение
Существует несколько различных двигателей переменного тока, использующих приводы переменного тока.Некоторые из основных типов приводов переменного тока и двигателей, которые они питают, можно найти ниже:
Синхронные двигатели
Если вам нужен надежный двигатель, который поддерживает постоянную скорость, синхронные двигатели идеально подходят. Эти двигатели и их приводы переменного тока могут поддерживать точную скорость даже при полной нагрузке. Поскольку вращающееся магнитное поле статора поддерживает скорость, равную скорости ротора, синхронный двигатель не имеет скольжения.
На практике синхронные двигатели используются в машинах, требующих исключительной точности.Некоторые высокоточные сверлильные станки используют их для обеспечения максимальной точности сверления. Другие примеры машин, в которых используются синхронные двигатели, включают дозирующие насосы, таймеры, часы, регуляторы скорости и электромеханические роботы.
Асинхронные двигатели
Асинхронные двигателине используют какие-либо физические соединения обмоток статора для наведения тока в обмотки ротора. Они хорошо известны своей способностью генерировать значительную мощность, возможностью регулирования скорости и адаптируемостью к широкому спектру сред.Асинхронные двигатели обычно имеют некоторое скольжение, при котором они теряют точное отслеживание скорости.
Асинхронные двигатели — это наиболее часто используемые двигатели и приводы переменного тока в повседневных процессах. Вы найдете асинхронные двигатели в кухонной технике, кондиционерах, транспортных средствах, промышленных машинах и водяных насосах. Они используются во многих бытовых устройствах из-за их гибкости в удовлетворении различных требований к нагрузке от многих электрических приложений.
Бессенсорные векторные приводы
Для лучшего управления скоростью и выходного крутящего момента на низких скоростях бессенсорный векторный привод берет на себя единоличное управление частотой и напряжением, подаваемым на двигатель.Этот тип привода наиболее близок к двигателям постоянного тока по своему действию. Как следует из их названия, они не используют никаких датчиков обратной связи, таких как резольверы или энкодеры.
Бессенсорные векторные приводыиспользуются в нескольких типах промышленных приложений. Они часто используются в приложениях с чрезвычайно высокой инерцией или когда приложению требуется высокий уровень точности установившейся скорости.
3. Приводы и контроллеры серводвигателей
Серводвигатель — один из самых эффективных двигателей, которым пользователи могут легко управлять для получения правильной выходной мощности.Этот тип двигателя основан на сервоприводе, который помогает генерировать точные движения для вращения или толкания частей вашей машины. Сервопривод изменяет входную мощность, используя источник переменного или постоянного тока и превращая его в импульсный токовый выход, который варьируется по частоте и длительности импульсов. Эти приводы помогают управлять положением, крутящим моментом и скоростью двигателя.
Существует два основных размера серводвигателей — малые и стандартные. Как и следовало ожидать, двигатель стандартного размера обеспечивает большую скорость и мощность, чем система двигателей.Маленькие серводвигатели обычно используются компаниями с ограниченным пространством и не нуждающимися в большой мощности. Большие сервоприводы сконструированы из металлических частей для более тяжелой работы, а маленькие серводвигатели сделаны из пластмассовых деталей.
Применение серводвигателя
Обычно серводвигатели и приводы используются для управления движением в строительстве и обрабатывающей промышленности. Их основные приложения включают помощь машине в выполнении задачи, которая должна выполняться часто и определенным образом.На практике они часто используются в системах привода шпинделя, конвейерах, станках и робототехнике. Чтобы получить более полное представление о серводвигателях, рассмотрим некоторые из их приложений ниже:
- Робототехника: Серводвигатели часто используются в робототехнике. Небольшой размер серводвигателей делает их идеальными для использования во многих роботах. Кроме того, они обеспечивают точность и плотность силы, необходимые роботам для правильной работы. Типы роботов, которые полагаются на серводвигатели и приводы, включают детонацию бомб, роботизированное оружие и дистанционно управляемые пожарные корабли.
- Промышленное производство: Компании обрабатывающей промышленности всегда стараются производить более точные и эффективные роботизированные и автоматизированные процессы. В производстве серводвигатели часто используются для приведения в действие роботизированных манипуляторов, перемещающих материалы. Кроме того, сервоприводы используются в производственных машинах, чтобы помочь машинам резать или гнуть металлические листы с большей точностью и мощностью. Они также используются в конвейерных системах для облегчения работы с прядильными элементами.
- Лифты: Когда компания создает лифтовую технику, безопасность является первоочередной задачей.Чтобы обеспечить безопасную транспортировку пассажиров лифтами, компании используют сервосистемы. Этот тип системы помогает сделать поездку максимально плавной для гонщиков за счет обратной связи и процессов управления.
4. Шаговый
Привод и контроллер шагового двигателя изменяют источники переменного или постоянного тока на ступенчатый выходной ток, который затем регулирует входную мощность шагового двигателя. По своей конструкции их еще называют шаговыми усилителями и импульсными приводами. Приводы шаговых двигателей контролируют и регулируют входную мощность с помощью постоянных магнитов.Они также используют аккуратно размещенные полюса как в статоре, так и в роторе, которые используют постоянный ток для создания ступенчатого вращения.
Поскольку выходное вращение шагового двигателя не является непрерывным, входная мощность должна регулироваться таким образом, чтобы помогать группам полюсов статора либо подавать, либо обесточивать. Приводы и контроллеры шагового двигателя имеют решающее значение для необходимого управления, которое помогает ему правильно функционировать. В частности, контроллер, интегрированный со схемой шагового привода, посылает соответствующие управляющие сигналы на моторный привод.
Приложения шагового двигателя
Этот тип двигателя в основном используется в таких отраслях, как строительство и производство. Они управляют крутящим моментом, положением и частотой вращения двигателей различных типов оборудования. Они довольно популярны благодаря своей открытой конструкции обратной связи и точности. Хотя они не подходят для высокоскоростных приложений, их точные, повторяемые движения по-прежнему работают в широком диапазоне скоростей. Шаговые двигатели известны своей надежностью, простотой в использовании и обратимостью.
У степперовесть несколько приложений, где они обычно используются.Компании регулярно используют маломощные шаговые двигатели для микропозиционирования, роботов, станков, приводов электрических часов, медицинского оборудования, принтеров, компьютерных систем управления и жестких дисков. Шаговые двигатели большой мощности используются в военной технике, конвейерах, научно-исследовательских устройствах и станках.