
Принцип работы вариаторной коробки передач
Коробка вариатор: как устроена, основные принципы работы, достоинства и недостатки. Что мешает завоевать ей лидерство среди других трансмиссий
Традиционно коробка переключения передач подразумевает под собой переключение передачи с одной на другую. Это осуществляется при выборе водителем или электроникой необходимой пары шестерен, которые создадут нужное передаточное число. На таком принципе основана работа механической и автоматической коробок передач. Но вариаторная коробка передач изменила данную традицию, внеся новые понятия в передаче крутящего момента от двигателя к колесам.
Содержание
- Немного истории
- Устройство и принцип работы вариаторной коробки
- Клиноременный механизм
- Клиноцепной механизм
- Управляющие устройства
- Плюсы и минусы вариаторов
- Подводя итоги
Немного истории
Принцип действия, на котором основана работа вариатора был замечен Леонардо да Винчи еще в 1490 году. Первый патент на это изобретение был получен в конце XIX века, а первые автомобили, имеющие вариатор, увидели свет только в 50-х годах прошлого века, когда инженеры компании DAF установили его на легковые автомобили, выпускаемые серийно. Чуть позже к ним присоединился концерн VOLVO. Но основное распространение коробка вариатор получила совсем недавно — в середине 90-х годов.
Первый патент на это изобретение был получен в конце XIX века, а первые автомобили, имеющие вариатор, увидели свет только в 50-х годах прошлого века, когда инженеры компании DAF установили его на легковые автомобили, выпускаемые серийно. Чуть позже к ним присоединился концерн VOLVO. Но основное распространение коробка вариатор получила совсем недавно — в середине 90-х годов.
Вариатор представляет собой бесступенчатую коробку передач, которая плавно передает крутящий момент от двигателя к трансмиссии в заданном числе оборотов коленчатого вала. Основным преимуществом вариатора является его оптимальный выбор соотношения оборотов двигателя и нагрузки на трансмиссию. Такой подход позволяет эффективно использовать мощностные показатели мотора, существенно экономить топливо. Кроме этого, плавное непрерывное изменение передаточного числа вариатора, сопровождающееся полным отсутствием рывков, дает самый высокий уровень комфорта при движении для водителя и пассажиров.
Основным стопором развития вариаторной трансмиссии является довольно высокая сложность передачи большого крутящего момента. Именно поэтому первое распространение коробка вариатор получила на малолитражных автомобилях, имеющих небольшую мощность двигателя. Но, тем не менее сегодня, с ростом технологий и внедрением в конструкцию металлических ремней, производители начали устанавливать вариаторы на автомобили мощностью свыше 200 л. с.
На сегодняшний момент распространение получили только три типа устройства вариаторов, такие, как клиноременный, тороидальный и совсем недавно разработанный клиноцепной механизм, применяемый в вариаторах Multitronic от Audi.
Устройство и принцип работы вариаторной коробки
Коробка вариатор состоит из следующих устройств:
- Механизм, передающий крутящий момент от двигателя на вариатор. Он же заведует разъединением двигателя и коробки — нейтральной передачей;
- Собственно вариаторный механизм;
- Электронная система управления;
- Механизм, обеспечивающий движение задним ходом.

Для соединения и разъединения двигателя с коробкой применяют несколько видов сцепления:
- Гидротрансформатор, являющийся наиболее применяемым устройством;
- Мокрое многодисковое сцепление под электронным управлением;
- Автоматическое центробежное сцепление;
- Электронное электромагнитное сцепление.
Наиболее часто совместно с вариатором применяется гидротрансформаторное сцепление. Такое сочетание обеспечивает наибольшую плавность передачи крутящего момента и, значит, большую долговечность механизма.
Чтобы понять, как работает коробка вариатор, стоит обратить внимание на велосипед, имеющий возможность переключения скоростей. Между двумя звездочками натянута цепь, которая передает крутящий момент. Задние звездочки имеют различный диаметр, и при выборе одной из них создается необходимое усилие для передвижения. Чем больше разница в диаметрах между ведущей и ведомой звездами, тем выше скорость движение. Чем меньше разница — тем больше тяговый момент, необходимый для преодоления сложных участков дороги. Такое же принципиальное действие заложено в вариаторе, только вместо звездочек и механизма, жестко переключающего передачи, используются раздвижные шкивы, состоящие из двух конусов, имеющих возможность перемещаться относительно друг друга по одной оси. Вместо обычной цепи в вариаторе работает клиноременная передача или специальная наборная цепь, состоящая из наборных пластин, соединенных между собой осями.
Такое же принципиальное действие заложено в вариаторе, только вместо звездочек и механизма, жестко переключающего передачи, используются раздвижные шкивы, состоящие из двух конусов, имеющих возможность перемещаться относительно друг друга по одной оси. Вместо обычной цепи в вариаторе работает клиноременная передача или специальная наборная цепь, состоящая из наборных пластин, соединенных между собой осями.
Клиноременный механизм
Самым распространенным на сегодня является клиноременный механизм. Такое устройство состоит из двух шкивов, соединенных между собой одним, реже двумя клиновидными ремнями. Шкивы состоят из конусов, способных передвигаться относительно друг друга при помощи актуаторов, которые приводятся в действие гидравлическим насосом. Насос, в свою очередь, работает под управлением электроники, центробежной силы или под усилием пружин. Конические диски, перемещаясь относительно друг друга, изменяют диаметр шкива, тем самым меняя передаточное число коробки передач.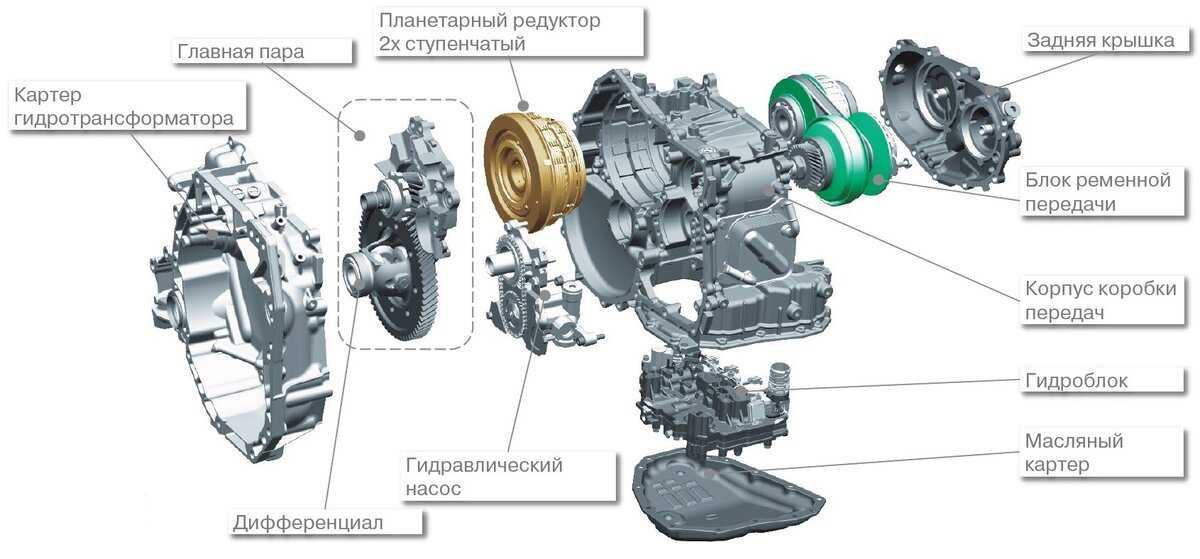 Угол наклона конусов в 20 градусов обеспечивает наилучшее сцепление ремня со шкивами с наименьшим сопротивлением.
Угол наклона конусов в 20 градусов обеспечивает наилучшее сцепление ремня со шкивами с наименьшим сопротивлением.
Изначально коробка вариатор имела резиновый клиновидный ремень, передающий тяговое усилие. Такое устройство не позволяло передавать высокий крутящий момент, обладало малой долговечностью и большим радиусом изгиба (более 90 мм), что давало малый разбег регулирования.
Но с изобретением гибкого металлического ремня, эти недостатки были решены. Сейчас большинство автомобилей с вариаторной коробкой имеют ремень на металлической основе. Такое устройство ремня, состоящее из набора большого количества металлических пластин определенной формы, напоминает много бабочек, сидящих на ветке. Связаны они между собой гибким соединением, позволяющим значительно уменьшить радиус изгиба до 30 мм, повысить долговечность и прочность передающего устройства. Благодаря металлической основе удалось начать применять коробки вариаторы на автомобилях, имеющих большую мощность, чем раньше.
Клиноцепной механизм
На вариаторах, установленных на автомобилях Audi, впервые была применена специальная цепная передача, получившая название клиноцепной. Такое цепное устройство состоит из набора металлических пластин, соединенных осями. Передача крутящего момента в такой коробке осуществляется при контакте торцевыми поверхностями цепи с дисками шкивов. В этих местах образуются повышенные нагрузки с высокими температурами. С нагрузками изобретатели справились применением специальной подшипниковой стали, а с высокими температурами — принудительным охлаждением трансмиссионной жидкости, применяемой в вариаторе. Благодаря высокой гибкости цепи, удалось сократить радиус изгиба до 25 мм, расширив диапазон передаточных чисел клиноцепной коробки по сравнению с клиноременной передачей.
Управляющие устройства
В силу своих конструктивных особенностей, вариаторная передача не дает возможности движения задним ходом. Такая особенность потребовала установки дополнительных механизмов.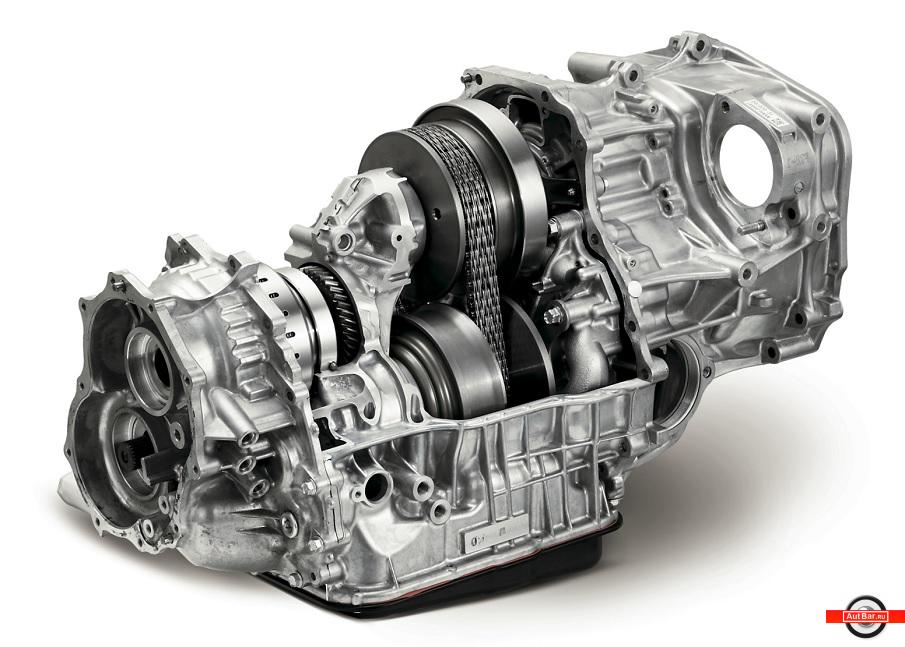 Обычно для этого используется планетарный редуктор, принцип действия которого подобен автоматической коробке передач.
Обычно для этого используется планетарный редуктор, принцип действия которого подобен автоматической коробке передач.
Все управление вариатором осуществляется при помощи электронных устройств, передающих информацию от множества датчиков. На его работу влияют обороты двигателя, ABS, датчики уровня давления в шинах и прочие. Собирая всю эту информацию, коробка вариатор выбирает необходимое передаточное число, соответствующее минимальному расходу топлива с оптимальным тяговым усилием, нужным для преодоления дорожных условий. Раздвигая, сдвигая конусы обоих шкивов, электронике удается добиться результатов динамики и экономии топлива, приближенных или даже превышающих показатели автомобилей с механической коробкой передач.
Устройство вариатораПлюсы и минусы вариаторов
Как все остальные механизмы переключения передач, коробка вариатор имеет свои плюсы и минусы. К положительным сторонам устройства стоит отнести следующее:
- Плавность переключения передач, точнее их отсутствие;
- Возможность использования ручного переключения по принципу Типтроника.
 Такая особенность имеется благодаря полностью электронному управлению коробкой;
Такая особенность имеется благодаря полностью электронному управлению коробкой; - Равномерное распределение нагрузки на двигатель, позволяющее работать ему в оптимальном режиме, что повышает его долговечность;
- Экономичность;
- Возможность быстрого старта;
- Простота механизма, что позволяет удешевить его производство и ремонт.
К недостаткам вариатора следует отнести минусы, такие как:
- Большая зависимость от электроники4
- Невозможность буксировки;
- Высокая стоимость применяемой жидкости. Низкая периодичность ее замены;
- Наличие постоянного троллейбусного звучания при различных стилях езды, в разных скоростных режимах
Подводя итоги
Несмотря на недостатки, такая коробка передач, как вариатор, имеет свое будущее. При нахождении решения изобретателями для передачи больших усилий, вариатор будет жить и развиваться во всех сегментах автомобилестроения.
Вариатор передач мототехники. Принцип работы и повышение ресурса основных компонентов
Вариатор передач: принцип работы и основные компоненты трансмиссии мототехники
Вариатор представляет собой устройство для обеспечения бесступенчатого изменения передаточного отношения между двигателем и колесами.
Вариаторы находят широкое распространение во многих механизмах, в частности в станках, конвейерных линиях, скутерах, снегоходах, мотоблоках, мотобуксировщиках и других агрегатах.
Выбор в пользу данного вида трансмиссии осуществляется из-за высокой надежности, простоты конструкции и длительного ресурса при должном обслуживании.
Вариатор мототехники состоит из следующих основных частей: валов, на которых расположены шкивы, ремня, роликов, пружины.
Шкивы вариатора
Основными компонентами любого вариатора являются шкивы. В конструкции их два – один ведомый и один ведущий.
Каждый шкив состоит из пары конических дисков, один из которых осуществляет возвратно-поступательные движения относительно вала, а второй закрепляется неподвижно.
Диски шкивов двигаются синхронно: если подвижный диск ведомого шкива отклоняется от неподвижной щеки, то диск ведомого на такое же расстояние приближается к зафиксированному элементу на своем валу.
В процессе перемещения подвижного диска меняется рабочий радиус шкива. Чем ближе ремень приближается к оси, тем меньше рабочий радиус.
Если рабочий радиус ведущего шкива мал (соответственно рабочий радиус ведомого механизма велик), то скорость вращения колес небольшая. По мере увеличения оборотов рабочий радиус ведущего шкива увеличивается – меняется передаточное отношение и увеличивается скорость транспортного средства.
Ведущий шкив располагается на коленчатом вале. Ведомый находится на вале сцепления.
Ремень вариатора
На вариаторах мототехники устанавливают клиновидные ремни – прорезиненные зубчатые ленты, которые осуществляют передачу крутящего момента с ведущего вала на ведомый.
Ремень вариатора перемещается с внешнего радиуса шкива на внутренний, меняя передаточное отношение.
Ремень начинает двигаться под влиянием подвижного диска ведущего шкива. При повышении оборотов мотора он сдвигается в сторону неподвижной щеки вариатора, выталкивая ремень на внешний радиус.
В тот же момент вытолкнутый наружу ремень продвигается вглубь дисков ведомого вала вариатора, раздвигая их.
Таким образом осуществляется регулирование передаточного отношения.
Ролики вариатора
Ролики вариатора предназначены для перемещения подвижного диска ведущего шкива при повышении оборотов.
Они представляют собой овальные грузики, покрытые слоем полимерного материала. Ролики устанавливаются на внешней части подвижной щеки и прижимаются шайбой, имея возможность двигаться по дорожкам в вертикальном направлении.
По мере увеличения центробежной силы при повышении оборотов двигателя ролики перемещаются с центра в сторону внешней кромки шкива.
Под действием грузиков подвижная щека перемещается в сторону зафиксированной, увеличивая рабочий радиус шкива.
Ролики заставляют щеки сдвигаться по мере увеличения оборотов, что позволяет увеличить скорость вращения колес.
Пружина вариатора
Пружина вариатора устанавливается на ведомом шкиве и служит для сближения щек.
В начальном положении рабочий радиус ведомого шкива вариатора максимален за счет усилия пружины.
При увеличении оборотов и соединении щек ведущего вала ремень стремится раздвинуть диски ведомого. Натяжение ленты становится сильнее усилия пружины и ремень движется внутрь шкива, уменьшая рабочий радиус.
В процессе перемещения ремня на меньший радиус ведомого шкива увеличивается скорость.
Причины износа вариатора и способы повышения ресурса
Вариатор является достаточно надежной трансмиссией и работает длительное время при условии бережного отношения и транспортному средству: недопущения перегрева компонентов вариатора, отсутствия движения по бездорожью и так далее.
Однако вследствие трения сопряженные компоненты вариатора истираются. В большей степени это касается подвижных дисков шкивов и сопряженных с ними осей.
Именно это является наиболее частой причиной ремонта вариатора. Причем детали сложно поддаются восстановлению, а стоимость новых компонентов высока.
Поэтому для увеличения ресурса вариаторов мототехники все чаще применяют антифрикционное твердосмазочное покрытие MODENGY 1002.
Оно наносится на контактирующие поверхности вариатора, снижая их износ, повышая плавность перемещения, обеспечивая защиту от коррозии.
Также материал может наноситься на ролики для снижения истирания в процессе движения по дорожкам. Несмотря на то, что замена грузиков не доставляет особого труда, снижение динамики разгона транспортного средства вследствие снижения веса роликов доставляет неудобства.
Кроме дисков и роликов повышенному износу подвергается ремень вариатора.

Он истирается о поверхности дисков шкивов, теряя свою работоспособность.
Также рекомендуется периодически проверять состояние ленты. При появлении трещин и повреждений, а также уменьшении ширины ремня необходимо провести замену.
Менять ремень необходимо при выключенном двигателе. Лента снимается после ослабления крепления щек шкивов, после чего устанавливается новая в соответствии с указаниями стрелок и надписей на внешней поверхности.
Нужное — Что такое вариатор? Принцип работы вариатора
Вариатор — это бесступенчатая трансмиссия с внешним управлением, которая позволяет автоматически плавно изменять передаточное число, выбирая наиболее оптимальное согласно внешней нагрузке и оборотам двигателя, тем самым давая возможность максимально эффективно использовать его мощность. В технике существует множество различных конструкций такого типа, но на автомобиле получили распространение два вида вариаторов: клиноременной и тороидный.
В технике существует множество различных конструкций такого типа, но на автомобиле получили распространение два вида вариаторов: клиноременной и тороидный.
Клиноременный вариатор как тип трансмиссии известен давно. Его главные детали — два раздвижных шкива и соединяющий их ремень, в сечении имеющий трапецеидальную форму. Если половинки ведущего шкива сдвинуть, они вытолкнут ремень, словно попавший между ними клин (отсюда и название «клиноременный»), наружу — радиус шкива, по которому работает ремень увеличится, следовательно, увеличится и передаточное отношение. А если половинки ведомого шкива, наоборот, раздвинуть, то ремень провалится внутрь и будет работать по меньшему радиусу — передаточное отношение уменьшится. Если оба шкива будут в промежуточном положении, то передача станет прямой.
Устройство и принцип работы вариатора
Клиноременной вариатор состоит из нескольких (как правило, одной- двух) ременных передач, где шкивы образованы коническими дисками, за счет сдвигания и раздвигания которых изменяются диаметр шкивов и, соответственно, передаточное число. Разные фирмы разработали каждая свою конструкцию клиноременного вариатора, так на Audi в трансмиссии Multitronic вместо ремня применяют цепь, а Honda ставит набранный из металлических пластин ремень, но принцип от этого не меняется.
Разные фирмы разработали каждая свою конструкцию клиноременного вариатора, так на Audi в трансмиссии Multitronic вместо ремня применяют цепь, а Honda ставит набранный из металлических пластин ремень, но принцип от этого не меняется.
Для трогания автомобиля с места используются обычное сцепление или небольшой гидротрансформатор, который вскоре после начала движения блокируется. Управление дисками шкивов осуществляет электронная система из сервоприводов, блока управления и датчиков.
Начнем с самого простого. Почему клиновидный ремень? Ремень в разрезе имеет трапециевидную форму и «вклинивается» в шкив только своими боковыми поверхностями. При износе этих поверхностей, благодаря своей форме, он врезается глубже в шкив и все равно остается в хорошей сцепке с ним. Как изменяется передаточное число? Устройство ведущего шкива (ведущий шкив вращается коленвалом) таково, что его щеки при воздействии центробежных сил плавно сжимаются и выталкивают клиновидный ремень все дальше и дальше от центра шкива. Ведомый же шкив при этом наоборот, разжимается, и ремень на нем плавно утопает все ближе и ближе к центру шкива. Чем больше обороты двигателя — тем больше сжимается ведущий шкив и разжимается ведомый, тем самым меняя передаточное число от коленвала к заднему колесу. Этот процесс хорошо виден на рисунках,прикрепленных к посту.
Ведомый же шкив при этом наоборот, разжимается, и ремень на нем плавно утопает все ближе и ближе к центру шкива. Чем больше обороты двигателя — тем больше сжимается ведущий шкив и разжимается ведомый, тем самым меняя передаточное число от коленвала к заднему колесу. Этот процесс хорошо виден на рисунках,прикрепленных к посту.
Иначе устроен тороидный вариатор, который состоит из соосных дисков и роликов, передающих момент от одного диска к другому. Для изменения передаточного числа меняются положение роликов и их радиусы, по которым ролики обкатывают диски. И поскольку все усилие сосредоточено в пятне контакта, то для поворота роликов должны использоваться особые устройства, способные преодолевать силу прижатия ролика к диску. Так в ниссановском вариаторе Extroid применена специальная система, где управляемый электроникой прецизионный гидравлический механизм перемещает обоймы с роликами вверх или вниз на микроскопическую величину, а далее, из-за возникшего сдвига относительно оси дисков, ролик поворачивается сам.
Между прочим, принцип устройства под названием “вариатор” не нов — мысли о бесступенчатой трансмиссии стали посещать конструкторов практически сразу с началом применения поршневых ДВС на транспорте. Современное же развитие электроники и технологии материалов дало возможности усовершенствовать (остающиеся, однако, в принципе своем неизменными) конструкции вариаторов, и сейчас наблюдается, по-видимому, начало самого широкого распространения таких трансмиссий на автотранспорте.
Тем не менее вариаторы пока что не избавились от некоторых своих весьма существенных проблем. Так, очевидно, что самыми конструктивно слабыми местами существующих сегодня автомобильных вариаторов являются: для клиноременного эти самые ремни, а для тороидного — пятно контакта диска и ролика, где сила давления достигает 10 тонн. Поэтому здесь применяются специальные высокотехнологичные материалы, что делает надежность вариаторов достаточно высокой, близкой к надежности гидромеханических “автоматов”, но все же из-за нагрузок на ремень или пятно контакта вариаторы пока не могут “тянуть грузы”, а также работать с двигателями большой мощности.
На сегодняшний день рекордом для клиноременного вариатора оказывается 220 л.с. и 300 Нм, которые развивает V-образный 6-цилиндровый мотор Audi A6, “воспринятый” трансмиссией Multitronic, а для тороидного — “переваренный” Extroid (3-литровый двигатель Nissan Gloria и Cedric), развивающий 240 л.с. и 310 Нм.
Однако если для грузовиков вариаторы до сих пор непригодны, то для легковых автомобилей весьма приемлемы, и здесь у бесступенчатых трансмиссий, очевидно, большое будущее, тем более что и технологии материалов не стоят на месте.
Если сравнить динамические характеристики многих автомобилей, оснащаемых вариатором, может возникнуть недоумение — почему на одной и той же модели автомобиля разгон с вариатором происходит медленнее, чем с механической коробкой, ибо должно быть наоборот, раз вариатор лучше использует мощность двигателя? Все дело в привычке — многие клиенты были очень недовольны, что машина с вариатором “все время ноет на одной ноте”. Большинство же водителей привыкли к знакомому нарастающему шуму мотора, и многие фирмы идут клиентам навстречу, специально настраивая электронный блок управления трансмиссией. На самом же деле при нормальной настройке блока разгон, конечно, происходит быстрее.
На самом же деле при нормальной настройке блока разгон, конечно, происходит быстрее.
В заключение отметим, что вариаторы является куда более совершенным типом трансмиссии по сравнению с традиционными автоматическими коробками передач. Совершенство проявляется в более лучшей динамике разгона, меньшем расходе топлива, более плавной езде у автомобилей оснащённых клиноременными вариаторами. И в тоже время, вариаторы проще по конструкции, чем традиционные «автоматы». Думается, что в недалёком будущем автомобили оснащённые вариаторами полностью вытеснят машины, оснащённые обычными «автоматами» и сильно потеснят машины с «механикой».
Методы управления скоростью различных типов двигателей с регулированием скорости
Скачать PDF
Kazuya SHIRAHATA
Компания Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулированием скорости. Наши блоки управления скоростью включают в себя двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость.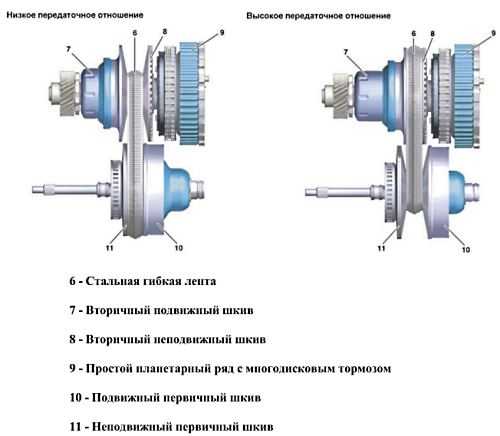 Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении от бытовой техники до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Функции и характеристики, необходимые для этих двигателей, очень разнообразны. Если сосредоточить внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели регулируют свою скорость с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и/или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и характеристики следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Двигатель переменного тока и мотор-редуктор
- Бесщеточный двигатель постоянного тока и мотор-редукторы
- Инверторный блок
2. Методы управления скоростью различных двигателей с регулированием скорости
Способ управления выходом схемы управления скоростью можно условно разделить на две группы: фазовое управление и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис. 1 Классификация двигателей с регулируемой скоростью
2.1. Двигатели переменного тока с регулируемой скоростью
2.1.1. Конструкция двигателя
Как показано на рис. 2, конструкция однофазных и трехфазных асинхронных двигателей включает в себя статор, на который намотана первичная обмотка, и литой из цельного алюминия ротор в форме корзины.
Рис. 2 Конструкция асинхронного двигателя
Когда скорость этого двигателя должна регулироваться, для определения скорости используется тахогенератор, который крепится к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к вал двигателя и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис. 3 Система управления двигателем переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя можно выразить выражением (1). Когда напряжение, подаваемое на двигатель, увеличивается и уменьшается, скольжение с изменяется, а затем изменяется скорость вращения N.
N = 120· f ·(1- s )/ P · · · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Hz〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, как показано на рис. 4, существует стабильный и нестабильный диапазоны на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы обеспечить надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Скорость вращения – характеристики крутящего момента асинхронных двигателей
Рис. 5 Простое управление напряжением
5 Простое управление напряжением
Доступные методы управления напряжением включают управление с помощью трансформатора или фазового управления. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения/выключения каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
Рис. 6 Изменение напряжения с помощью трансформатора
Рис. 7 Изменение напряжения с помощью фазы управления
Рис. управление фазой с обратной связью даже в нестабильном диапазоне.
управление фазой с обратной связью даже в нестабильном диапазоне.
На рис. 9 в виде блок-схемы показана конфигурация системы управления скоростью для двигателя переменного тока с регулированием скорости.
Рис. 9 Блок-схема системы управления двигателем переменного тока
Рис. 10 Форма волны для каждого блока
На рис. 10 показаны формы волны для каждого блока. Заданное значение скорости d и обнаруженное напряжение e скорости, генерируемой тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения a .
Сигнал напряжения a низкий, когда обнаруженное значение скорости достигает заданного значения скорости, и выше, когда заданное значение скорости снижается. Поскольку триггерный сигнал выводится в точке, где треугольная волна b пересекается с сигналом напряжения a , определяется время (фазовый угол) включения симистора с уровнем сигнала напряжения a . Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид вышеупомянутого регулятора скорости. На рис. 11 рабочая точка двигателя рисует петлю Q-R-S-T-Q с центром в точке O, а скорость вращения поддерживается между N1 и N2. Эта петля максимально уменьшена за счет повышения точности определения скорости.
Рис. 11 Работа регулятора скорости
Электродвигатель регулятора скорости переменного тока имеет следующие особенности при использовании фазового регулирования с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто потому, что сглаживающая схема не нужна, что позволяет получить компактную конструкцию по низкой цене.
2) Точно так же возможна конструкция с длительным сроком службы, поскольку не нужен большой алюминиевый электролитический конденсатор.
3) Переключение выполняется только один раз в каждом полупериоде стандартного источника питания переменного тока, что снижает уровень создаваемого шума.
2.1.3. Характеристики
Двигатели переменного тока с регулированием скорости обычно имеют характеристики скорости вращения и крутящего момента, показанные на рис. 12.
Рис. 12. «Линия безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, то катушка соединена звездой (звездой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов на каждый оборот ротор.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики скорости вращения бесщеточного двигателя постоянного тока имеют отрицательный наклон, когда его скорость не регулируется, что аналогично характеристике коллекторного двигателя постоянного тока.
Рис. 15 Характеристики вращательного момента бесщеточного двигателя постоянного тока скорость N1. Когда приложен момент нагрузки T1, рабочая точка смещается к Q, а скорость вращения уменьшается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Это управление напряжением осуществляется инвертором в выходной части схемы управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как показано на рис. 16 (b), с помощью шести переключающих элементов (FET или IGBT), показанных на рис. 16 (a).
Рис. 16 (a) Выходная часть цепи управления (драйвер)
Рис. 16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис. 16 (а), а состояние ВКЛ/ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется интегральной микросхемой Холла, и соответствующий переключающий элемент включается или выключается, как показано на рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включены, и ток течет из фазы U в фазу W.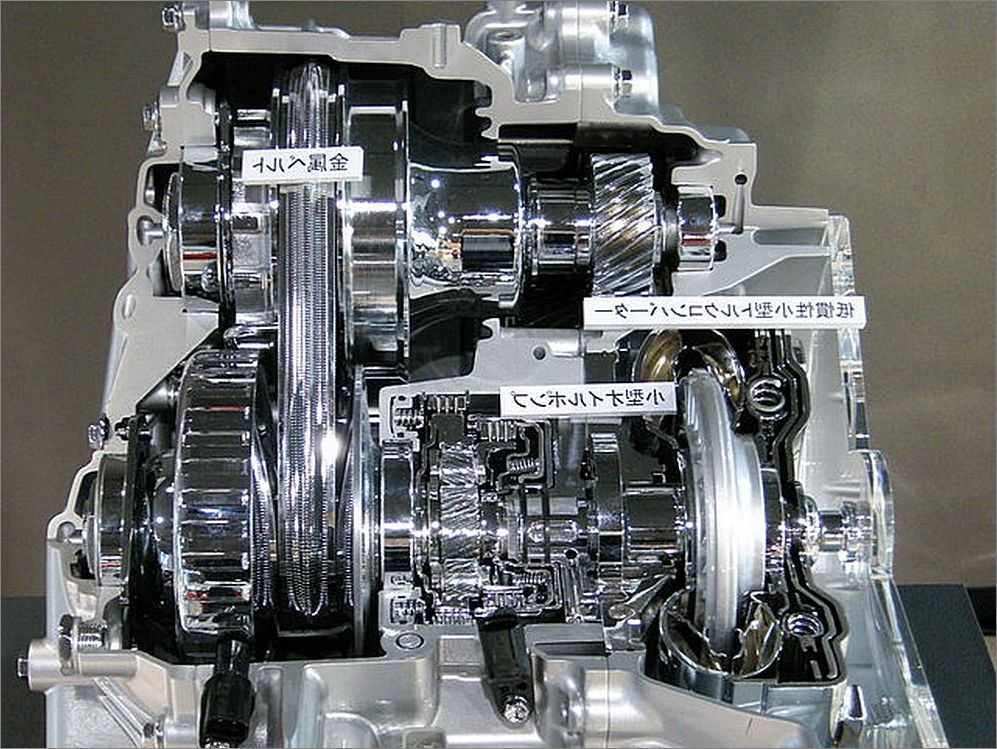 В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
На рис. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис. 17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от микросхемы Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от IC Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом задания скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения. Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами, а вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость отклика.
3) Двигатель можно уменьшить, поскольку он очень эффективен.
4) Небольшие колебания скорости при изменении нагрузки.
На рис. 16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, прикладываемых методом синусоидального привода и методом 120-градусного привода
2.2.3. Характеристики
Характеристики скорости вращения бесщеточного двигателя постоянного тока имеют ограниченный рабочий диапазон в дополнение к непрерывному рабочему диапазону.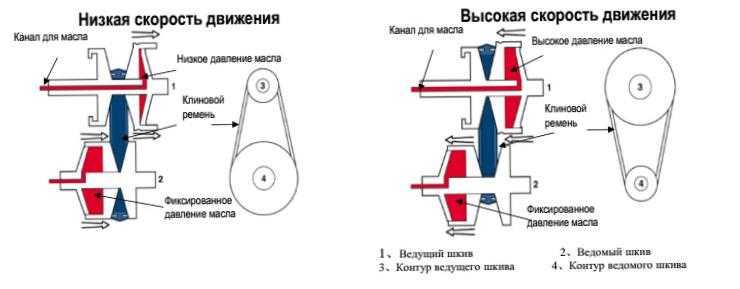
Зона ограниченного режима работы очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, активируется функция защиты привода от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок регулирует скорость трехфазного асинхронного двигателя путем изменения частоты f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f путем изменения цикла ВКЛ/ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120· f ·(1- s )/ P ·· · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ/ВЫКЛ, как показано на рис. 21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее напряжение, двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее напряжение, двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
Рис. 19 Управление работой ВКЛ/ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление без обратной связи, которое просто изменяет скорость, и управление с обратной связью, которое снижает скорость изменение при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация системы управления в виде блок-схемы.
Рис. 20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частота может быть установлена до 80 Гц) просто тогда, когда регулирование скорости при различных нагрузках не так важно.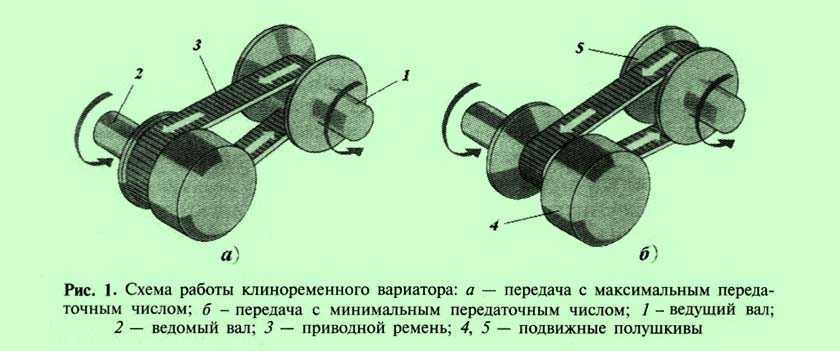
Создаваемый крутящий момент T двигателя отображается по формуле (2). Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если V/f, отношение напряжения V к частоте f, будет постоянным.
T = K ・ I・V / f ・・・1 (9200)
t : крутящий момент [N · M]
v : напряжение питания [V]
i : Моторный ток [A]
f : Частота [Гц]
: 0004
Однако, чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f. Следовательно, чтобы получить постоянный крутящий момент от низкой скорости до высокой, необходимо отрегулировать отношение V/f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рис. 23.
Рис. 21 Управление V/f
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис. 22 Блок-схема управления с обратной связью
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя данные характеристик. таблице (рис. 25), подготовленной заранее, и регулирует частоту преобразователя без необходимости использования датчика скорости на двигателе.
Рис. 23 Характеристики Таблица
С помощью этой таблицы характеристик и обнаруженного времени разности фаз t инвертор вычисляет выходную частоту инвертора, которая соответствует команде скорости вращения Nset, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления V/f вычисляет напряжение, подаваемое на двигатель, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
2.3.2. Характеристика s
Характеристики скорости вращения и крутящего момента инверторного блока показаны на Рис. 26 и Рис. 27. Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис. 24. Характеристики скорости вращения для управления без обратной связи
) для использования в широком диапазоне приложений управления скоростью. Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, которая наилучшим образом отвечает различным потребностям наших клиентов.
Ссылки
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998) 163, стр. 19-25 (2003)
(3) Коджи Намихана, Масаёси Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA № 159, стр. 23-28 (1999)
| Kazuya Shirahata Завод Tsuruoka, ACIX Operations Circuit Technology Division Секция разработки схемы |
Что такое частотно-регулируемый привод?
Преобразователь частоты (VFD) — это тип контроллера двигателя, который приводит в действие электродвигатель путем изменения частоты и напряжения, подаваемого на электродвигатель. Другие названия частотно-регулируемого привода: преобразователь частоты , преобразователь частоты , преобразователь частоты , привод переменного тока , микропривод и инвертор 9.0009 .
Другие названия частотно-регулируемого привода: преобразователь частоты , преобразователь частоты , преобразователь частоты , привод переменного тока , микропривод и инвертор 9.0009 .
Частота (или герц) напрямую связана со скоростью двигателя (об/мин). Другими словами, чем выше частота, тем выше скорость вращения. Если приложение не требует, чтобы электродвигатель работал на полной скорости, частотно-регулируемый привод можно использовать для снижения частоты и напряжения в соответствии с требованиями нагрузки электродвигателя. По мере того как требования к скорости двигателя приложения меняются, ЧРП может просто увеличить или уменьшить скорость двигателя, чтобы удовлетворить требования скорости.
Как работает частотно-регулируемый привод? Первой ступенью преобразователя частоты является преобразователь. Преобразователь состоит из шести диодов, которые аналогичны обратным клапанам, используемым в водопроводных системах. Они позволяют току течь только в одном направлении; направление, указанное стрелкой на символе диода. Например, всякий раз, когда напряжение фазы A (напряжение аналогично давлению в водопроводных системах) более положительное, чем напряжение фазы B или C, тогда этот диод открывается и пропускает ток. Когда фаза B становится более положительной, чем фаза A, диод фазы B открывается, а диод фазы A закрывается. То же самое верно для 3 диодов на отрицательной стороне шины. Таким образом, мы получаем шесть «импульсов» тока при открытии и закрытии каждого диода. Это называется «шестиимпульсный частотно-регулируемый привод», который является стандартной конфигурацией для современных частотно-регулируемых приводов.
Они позволяют току течь только в одном направлении; направление, указанное стрелкой на символе диода. Например, всякий раз, когда напряжение фазы A (напряжение аналогично давлению в водопроводных системах) более положительное, чем напряжение фазы B или C, тогда этот диод открывается и пропускает ток. Когда фаза B становится более положительной, чем фаза A, диод фазы B открывается, а диод фазы A закрывается. То же самое верно для 3 диодов на отрицательной стороне шины. Таким образом, мы получаем шесть «импульсов» тока при открытии и закрытии каждого диода. Это называется «шестиимпульсный частотно-регулируемый привод», который является стандартной конфигурацией для современных частотно-регулируемых приводов.
Предположим, что привод работает от сети 480 В. Номинальное значение 480 В является «среднеквадратичным» или среднеквадратичным. Пики в системе 480 В составляют 679 В. Как видите, шина постоянного тока ЧРП имеет постоянное напряжение с пульсациями переменного тока. Напряжение колеблется между примерно 580В и 680В.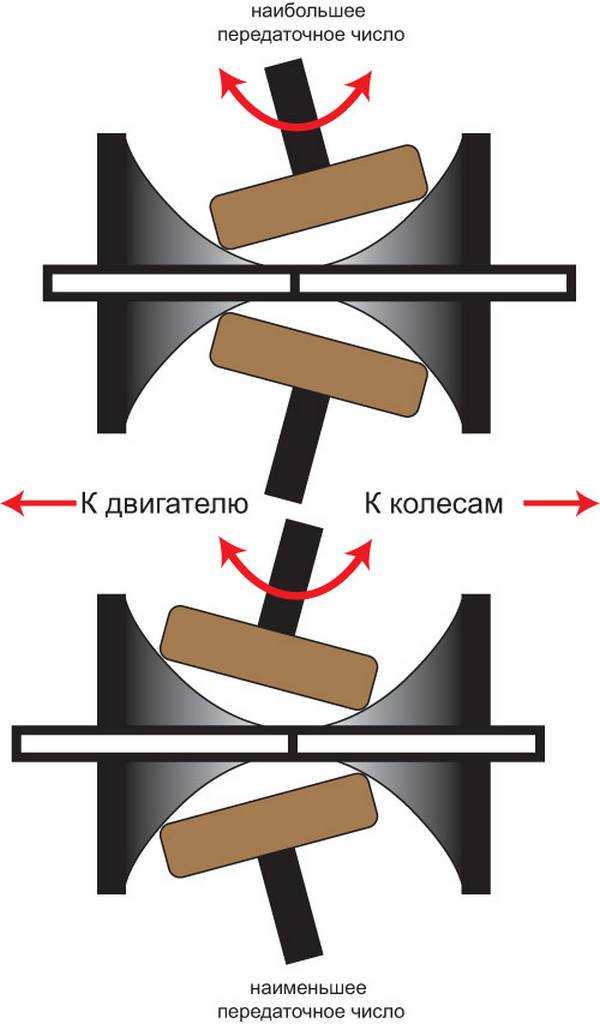
Мы можем избавиться от пульсаций переменного тока на шине постоянного тока, добавив конденсатор. Конденсатор работает аналогично резервуару или аккумулятору в водопроводной системе. Этот конденсатор поглощает пульсации переменного тока и выдает плавное постоянное напряжение. Пульсации переменного тока на шине постоянного тока обычно не превышают 3 вольт. Таким образом, напряжение на шине постоянного тока становится «примерно» 650 В постоянного тока. Фактическое напряжение будет зависеть от уровня напряжения линии переменного тока, питающей привод, уровня асимметрии напряжения в энергосистеме, нагрузки двигателя, импеданса энергосистемы и любых дросселей или фильтров подавления гармоник в приводе.
Преобразователь диодного моста, который преобразует переменный ток в постоянный, иногда называют просто преобразователем. Преобразователь, который преобразует постоянный ток обратно в переменный, также является преобразователем, но, чтобы отличить его от диодного преобразователя, его обычно называют «инвертором».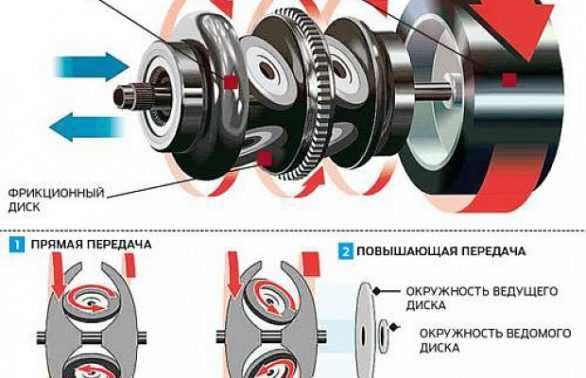 В отрасли стало обычным называть любой преобразователь постоянного тока в переменный инвертором.
В отрасли стало обычным называть любой преобразователь постоянного тока в переменный инвертором.
Обратите внимание, что в реальном ЧРП показанные переключатели на самом деле являются транзисторами.
Когда мы замыкаем один из верхних переключателей инвертора, эта фаза двигателя подключается к положительной шине постоянного тока, и напряжение на этой фазе становится положительным. Когда мы замыкаем один из нижних переключателей в преобразователе, эта фаза подключается к отрицательной шине постоянного тока и становится отрицательной. Таким образом, мы можем сделать любую фазу на двигателе положительной или отрицательной по желанию и, таким образом, можем генерировать любую частоту, которую захотим. Таким образом, мы можем сделать любую фазу положительной, отрицательной или нулевой.
Синяя синусоида показана только для сравнения. Привод не генерирует эту синусоиду.
Обратите внимание, что выходной сигнал частотно-регулируемого привода имеет «прямоугольную» форму волны. ЧРП не производят синусоидальный выходной сигнал. Эта прямоугольная форма волны не подходит для распределительной системы общего назначения, но вполне подходит для двигателя.
ЧРП не производят синусоидальный выходной сигнал. Эта прямоугольная форма волны не подходит для распределительной системы общего назначения, но вполне подходит для двигателя.
Если мы хотим снизить частоту двигателя до 30 Гц, то просто медленнее переключаем выходные транзисторы инвертора. Но если мы уменьшим частоту до 30 Гц, то мы также должны уменьшить напряжение до 240 В, чтобы сохранить соотношение В/Гц (подробнее об этом см. в презентации «Теория двигателя с частотным преобразователем»). Как мы собираемся снизить напряжение, если единственное напряжение, которое у нас есть, составляет 650 В постоянного тока?
Это называется широтно-импульсной модуляцией или ШИМ. Представьте, что мы можем контролировать давление в водопроводе, включая и выключая клапан с высокой скоростью. Хотя это было бы непрактично для сантехнических систем, это очень хорошо работает для частотно-регулируемых приводов. Обратите внимание, что в течение первого полупериода напряжение включено в половине случаев и выключено в половине случаев. Таким образом, среднее напряжение составляет половину от 480В или 240В. Импульсируя выход, мы можем добиться любого среднего напряжения на выходе ЧРП.
Таким образом, среднее напряжение составляет половину от 480В или 240В. Импульсируя выход, мы можем добиться любого среднего напряжения на выходе ЧРП.
См. рисунки ниже, чтобы понять, как выглядят различные части диска.
Зачем мне использовать частотно-регулируемый привод?1 — Снижение энергопотребления и затрат на электроэнергию
Если у вас есть приложение, которое не нужно запускать на полной скорости, вы можете сократить затраты на электроэнергию, управляя двигателем с помощью частотно-регулируемого привода, который является одним из преимущества частотно-регулируемых приводов. Преобразователи частоты позволяют согласовать скорость моторизованного оборудования с требованиями нагрузки. Не существует другого метода управления электродвигателем переменного тока, позволяющего выполнить это.
Системы электродвигателей сегодня обеспечивают более 65% потребляемой в промышленности энергии. Оптимизация систем управления двигателями путем установки или модернизации частотно-регулируемых приводов может снизить потребление энергии на вашем объекте на целых 70%. Кроме того, использование частотно-регулируемых приводов повышает качество продукции и снижает производственные затраты. При сочетании налоговых льгот на энергоэффективность и скидок на коммунальные услуги окупаемость инвестиций в установки ЧРП может составлять всего 6 месяцев.
Кроме того, использование частотно-регулируемых приводов повышает качество продукции и снижает производственные затраты. При сочетании налоговых льгот на энергоэффективность и скидок на коммунальные услуги окупаемость инвестиций в установки ЧРП может составлять всего 6 месяцев.
2 — Увеличение производства за счет более строгого контроля процесса
Работая с двигателями на наиболее эффективной для вашего применения скорости, вы снизите количество ошибок и, таким образом, повысите уровень производства, что принесет вашей компании более высокие доходы. На конвейерах и лентах вы устраняете рывки при запуске, обеспечивая высокую пропускную способность.
3 — Продление срока службы оборудования и сокращение объема технического обслуживания
Ваше оборудование прослужит дольше и снизит время простоя благодаря техническому обслуживанию, если оно управляется частотно-регулируемым приводом, обеспечивающим оптимальную скорость вращения двигателя. Благодаря оптимальному управлению ЧРП частотой и напряжением двигателя, ЧРП обеспечивает лучшую защиту вашего двигателя от таких проблем, как электротермические перегрузки, фазовая защита, пониженное напряжение, перенапряжение и т.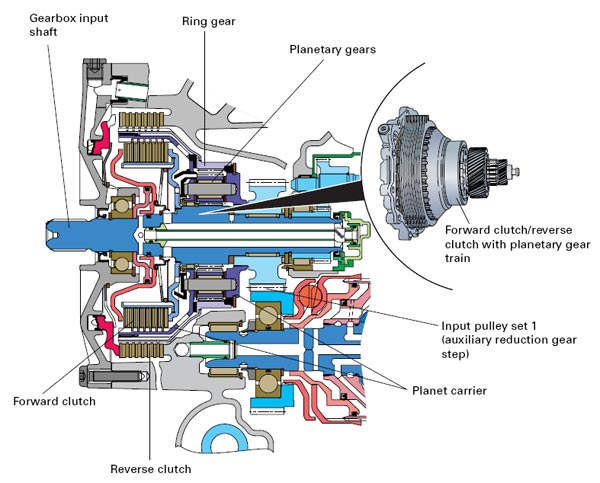 д. Когда вы запускаете нагрузку с помощью ЧРП, вы не подвергает двигатель или приводную нагрузку «мгновенному удару» при пуске через линию, но может запускаться плавно, тем самым устраняя износ ремня, шестерни и подшипников. Это также отличный способ уменьшить и/или устранить гидравлический удар, поскольку мы можем иметь плавные циклы ускорения и торможения.
д. Когда вы запускаете нагрузку с помощью ЧРП, вы не подвергает двигатель или приводную нагрузку «мгновенному удару» при пуске через линию, но может запускаться плавно, тем самым устраняя износ ремня, шестерни и подшипников. Это также отличный способ уменьшить и/или устранить гидравлический удар, поскольку мы можем иметь плавные циклы ускорения и торможения.
Крейг Хартман
Крейг является вице-президентом по проектированию в Energy Management Corporation. Он является профессиональным инженером (PE) и обладает более чем 30-летним опытом работы в области электрической автоматизации. Помимо накопления впечатляющего объема знаний в своем великолепном мозгу, он также является мастером подводного плавания (MSD), выступающим фокусником и профессиональным ди-джеем. Действительно человек многих талантов.
Свяжитесь с нами, используя эту форму
или позвоните нам по телефону 1-800-800-2261, чтобы получить ответы на ваши технические вопросы.
 Наши специалисты по двигателям и приводам имеют более чем 30-летний опыт работы.
Наши специалисты по двигателям и приводам имеют более чем 30-летний опыт работы. Мы знаем моторы и приводы!
Как работает частотно-регулируемый привод
Использование частотно-регулируемого привода (VFD) может сократить расходы на электроэнергию и ее потребление. Кроме того, частотно-регулируемые приводы могут ужесточить технологические процессы, сократить объем технического обслуживания, повысить производительность и продлить срок службы вашего оборудования.
Что такое ЧРП?ЧРП или частотно-регулируемый привод — это электронное устройство, используемое для управления асинхронным или синхронным двигателем переменного тока. ЧРП управляет крутящим моментом, скоростью и направлением двигателя, плавно запуская и разгоняя двигатель до желаемой скорости с контролируемой скоростью ускорения. Замедление также контролируется, а торможение доступно в качестве опции.
ЧРП позволяют использовать один двигатель для различных процессов и условий, которые могут требовать разных скоростей. Другие названия частотно-регулируемого привода включают:
Другие названия частотно-регулируемого привода включают:
- Привод с регулируемой скоростью
- Преобразователь частоты
- Преобразователь частоты/напряжения
- Привод переменного тока
- Микродрайв
- Инвертор
- Преобразователь частоты
В отличие от электросети с фиксированной частотой, обеспечивающей постоянную работу двигателя на полной скорости, частотно-регулируемый привод обеспечивает гибкость и экономию средств в производстве и других отраслях. Доступны частотно-регулируемые приводы различных типов и мощностей от менее 1 до тысяч лошадиных сил. Кроме того, вы можете выбрать скалярное управление PWM V/HZ, векторное управление PWM с обратной связью, векторное управление без обратной связи, прямое управление крутящим моментом (DTC) и другие методы управления двигателем.
Как работает частотно-регулируемый привод Преобразователь частоты подает фиксированное переменное напряжение и частоту на выпрямительный мост для преобразования напряжения в постоянное, использует батарею конденсаторов и катушки индуктивности для фильтрации постоянного тока, затем инвертирует постоянное напряжение обратно в переменного тока и отправляет его на двигатель с желаемой частотой.
- Микропроцессор или цифровой сигнальный процессор (DSP) взаимодействует с ПЛК и пользователем (через ЧМИ или клавиатуру), наблюдает за работой двигателя и проверяет наличие неисправностей.
- Схема управления координирует переключение силовых устройств для активации силовых компонентов в правильной последовательности. Скорость двигателя изменяется за счет изменения напряжения и частоты, подаваемых выходными устройствами.
- Базовые частотно-регулируемые приводы поддерживают крутящий момент двигателя, поддерживая постоянное отношение напряжения к частоте. Усовершенствованные устройства используют более интеллектуальные и адаптивные алгоритмы для повышения производительности двигателя.
Короче говоря, частотно-регулируемый привод преобразует одно напряжение и частоту в другое, чтобы изменить скорость двигателя без потери крутящего момента.
Систему привода ЧРП можно разделить на три подсистемы:
- Двигатель переменного тока , чаще всего трехфазный асинхронный двигатель, но иногда однофазный или синхронный двигатель.

- Контроллер главного привода , использующий полупроводниковую систему преобразования силовой электроники, содержащую выпрямительный мостовой преобразователь, звено или фильтр постоянного тока и секцию переключения или инвертора.
- Интерфейс мониторинга и управления , предоставляющий оператору или ПЛК возможность запуска и остановки двигателя, регулировки скорости, изменения направления и т. д. Этот интерфейс также предоставляет информацию о работе двигателя, состоянии привода и т. д. Связь с ПЛК может осуществляться с помощью нескольких протоколов последовательной связи или через релейные входы и выходы «старой школы» в сочетании с аналоговыми сигналами 4–20 мА или 0–10 В.
За прошедшие десятилетия частотно-регулируемые приводы стали меньше, в частности, благодаря микропроцессорам, заменившим полупроводниковые компоненты. Во многих приложениях окупаемость вложений в диски часто превышает цену диска.
Когда использовать частотно-регулируемый привод ЧРП используются в системах, приводимых в действие электродвигателями переменного тока, от производства до кондиционирования воздуха. Существует множество причин для выбора системы с частотно-регулируемым приводом.
Существует множество причин для выбора системы с частотно-регулируемым приводом.
- Для точного контроля скорости производственного процесса.
- Для обеспечения плавного пуска и плавного разгона до рабочей скорости.
- Для экономии энергии, особенно в приложениях, где крутящий момент и мощность нагрузки изменяются нелинейно. Вентиляторы и насосы с переменным крутящим моментом являются хорошими кандидатами на экономию.
- Для улучшения процесса и качества ускорения, расхода, мониторинга, скорости, температуры, напряжения, крутящего момента и давления в вашем приложении.
- Для запуска двигателя по специальным схемам для минимизации механических и электрических нагрузок.
ЧРП значительно уменьшают или устраняют скачки тока, необходимые для запуска двигателя «через линию». Помимо скачков тока, в восемь раз превышающих ток полной нагрузки двигателя, такой тип пуска также может повредить механические компоненты приводимой нагрузки.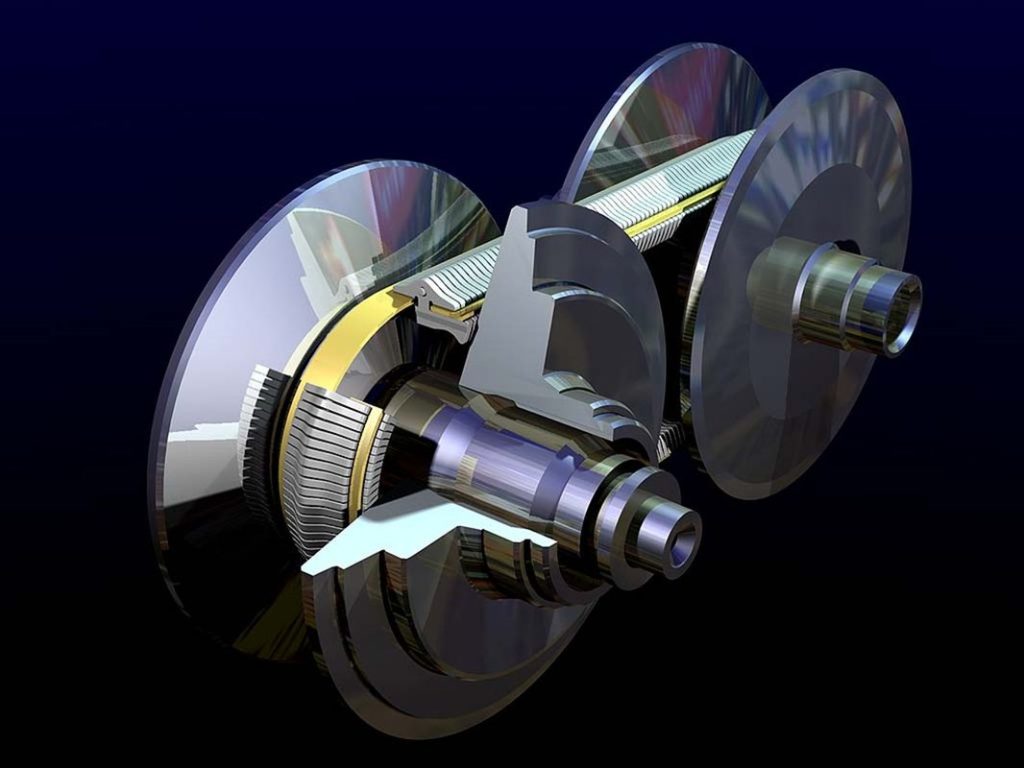
Небольшое техническое обслуживание — это все, что ЧРП требует от своих операторов. Следите за тем, чтобы на диске не было пыли, обеспечьте надлежащую вентиляцию, держите все в сухом и защищенном от влаги месте. Время от времени проверяйте надежность всех электрических соединений.
ЧРП — невероятно надежные устройства. Когда частотно-регулируемый привод указывает на неисправность, бортовая диагностика может помочь определить причину, а иногда и способ устранения. Многие неисправности не являются неисправностью самого частотно-регулируемого привода, но могут означать проблемы с входной мощностью, двигателем или ведомой нагрузкой.
Преобразователь частоты, независимо от того, регулируется ли он вручную или с помощью ПЛК, может помочь вам усилить контроль над технологическим процессом при одновременном увеличении производительности. Затраты на техническое обслуживание и ремонт ваших линий снижаются, как и ваши счета за электроэнергию.