
Устройство (схема) промышленного робота. Приводы промышленных роботов. Механизмы промышленных роботов.
Устройство современных промышленных роботов довольно сложно. Этим объясняется то, что производители выполняют их обслуживание и ремонт практически всегда сами.
Устройство промышленного робота может быть различным в зависимости от типа робота: шарнирный робот, дельта робот или SCARA робот. Рассмотрим схему промышленного робота на примере шарнирного робота. Упрощенно робот состоит из следующих компонентов:
-
блока управления с пультом;
-
опорной конструкции;
-
привода руки манипулятора;
-
руки манипулятора;
-
запястья манипулятора;
-
захватного устройства.


Исполнительный механизм робота манипулятора представляет собой открытую кинематическую цепь, звенья которой последовательно соединены собой и обладают, как правило, одной степенью свободы. Подвижность робота определяется сочетанием и взаимным расположением сочленений, при это условно сочленения подразделяются на две группы: выполняющие транспортную функцию, предназначенные для вывода манипулятора в нужную позицию, и выполняющие ориентирующую функцию, отвечающие за ориентацию рабочего органа.
На конце манипулятора промышленного робота устанавливается исполнительный (рабочий) орган.
В общем виде все захватные устройства подразделяются на схватывающие, поддерживающие и удерживающие.
В качестве рабочего органа промышленного робота могут использоваться сварочные клещи, пульверизатор, фреза, дрель, нож, сварочная головка, отвертка и т.д.
Приводы промышленных роботов предназначены для приведения в движение звеньев манипулятора и бывают: электрические, гидравлические и пневматические. Об электрических приводах промышленных роботов мы немного сказали выше. Скажем еще, что электрические приводы роботов являются наиболее распространенными ввиду своей точности. Гидравлические приводы промышленных роботов обеспечивают большее усилие и быстродействие, однако они устанавливаются лишь на роботах очень большой грузоподъемности.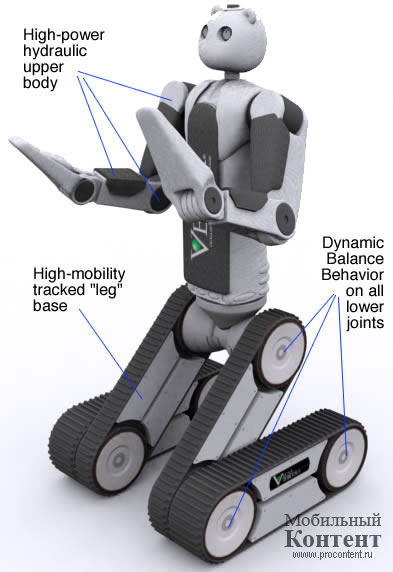
Следует отметить что механизмы промышленных роботов всех основных производителей обладают высокой износоустойчивостью, обеспечивая ресурс работы до обслуживания в несколько тысяч часов и более.
Контроллеры промышленного робота состоят из блока управления и пульта управления. Блок управления предназначен для управления роботом, при этом он может одновременно управлять несколькими роботами. Пульт управления предназначен для программирования робота или оперативного внесения изменений в его работу.
Если у вас есть какие-либо вопросы по устройству (схеме) промышленного робота вы всегда можете обратиться к специалистам компании АЛЬФА ИНЖИНИРИНГ. Мы будем рады проконсультировать вас по всем вопросам работы промышленного робота и в случае необходимости выполним внедрение робототехнической ячейки на базе роботов FANUC «под ключ».
Механизмы и конструкции роботов
Роботами называются автоматические машины, которые могут быть или стационарными, или передвижными, и спроектированы по образу и подобию различных живых организмов.
С точки зрения своей конструкции они являются весьма сложными механизмами, в которых на практике реализовываются достижения технического прогресса в таких областях, как электроника, точная механика, оптика, пневмоавтоматика и многое другое.
В практике современного производства роботы используются для того, чтобы осуществлять различные операции по тем программам, которые в них заложены, и которые в большинстве случаев выполняются людьми.
Конструкции роботов
Одной из важнейших характеристик роботов является то, что они оснащены всевозможными датчиками с которых снимается информация о внешней среде и в зависимости от результатов обработки этих данных, корректируют свои действия.
В большинстве случаев роботы состоят из таких частей, как манипуляторы, имеющие несколько степеней свободы, специальных приводов, обеспечивающих их передвижение в пространстве, а также перепрограммируемых устройств управления.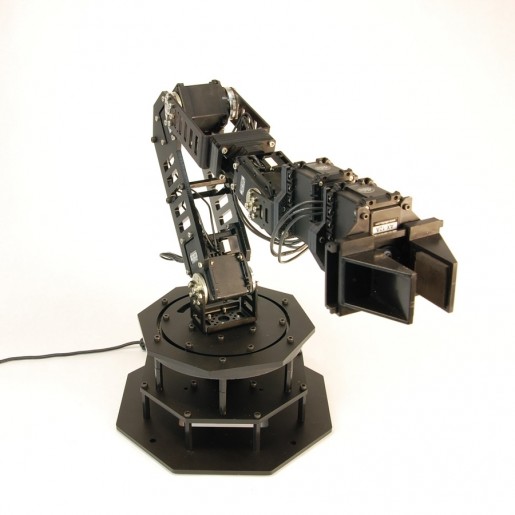
В общем и целом можно считать, что любой современный робот представляет собой ни что иное, как единый, нацеленный на выполнение определенных функций, механизм, состоящее из определенных блоков, каждый из которых имеет свое собственное функциональное назначение.
Несущий корпус робота
Тем основным элементом, в котором располагаются все остальные детали и механизмы любого робота, является его корпус. В большинстве случаев он является также несущей, силовой составляющей всей конструкции, которая предназначается для того, чтобы обеспечить необходимое взаимное расположение всех электрических, кинематических и других звеньев механизмов роботов. Помимо этого корпус во многих случаях является защитой их от воздействия неблагоприятных внешних факторов окружающей среды, повреждений механического характера и т.п. Он может быть как внешним, так и внутренним, и во втором случае он именуется каркасом.
Как правило, корпуса современных роботов изготавливаются из таких материалов, как нержавеющая или обычная конструкционная сталь, а также пластмассы и алюминиевые сплавы.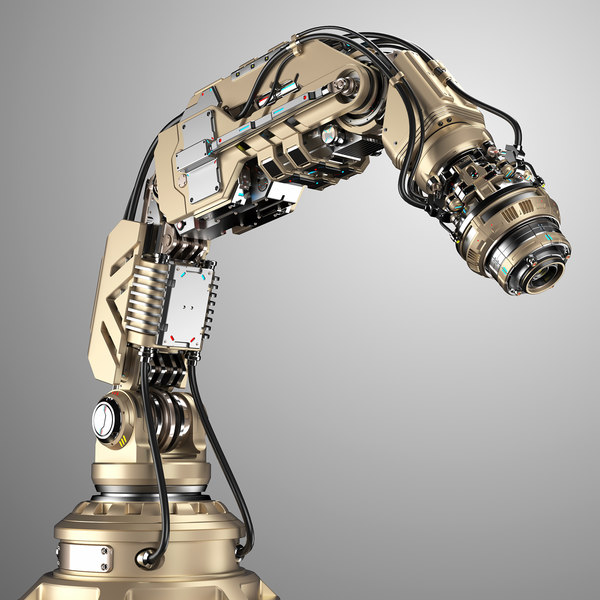 Из последних обычно производятся методом точного литья корпуса, имеющие сложную форму и значительные геометрические размеры. Те корпуса, которые в процессе эксплуатации роботов подвергаются наиболее серьезным механическим нагрузкам, производятся из стали. В местах где требуется размещать несущие электрические системы корпуса изготавливаются из пластмасс.
Из последних обычно производятся методом точного литья корпуса, имеющие сложную форму и значительные геометрические размеры. Те корпуса, которые в процессе эксплуатации роботов подвергаются наиболее серьезным механическим нагрузкам, производятся из стали. В местах где требуется размещать несущие электрические системы корпуса изготавливаются из пластмасс.
Валы и оси роботов
В современных механизмах роботов широко используются такие детали, как оси, валы, втулки, штоки, шестерни, цилиндры, рычаги и кулачки.
Для изготовления штоков, осей и валов механизмов роботов используются чаще всего стали Ст40 и Ст45, а также легированные стали 1Х18Н9Т и 40Х. Кроме того, в отдельных случаях они вытачиваются из цветных сплавов. Эти изделия согласно действующим техническим требованиям, по такому параметру, как точность посадочных цилиндрических поверхностей должны соответствовать 6 – 9 квалитету, а в отдельных случаях – 5 квалитету.
Оси и валы механизмов роботов служат для того, чтобы на них устанавливать шкивы, звездочки цепных передач, зубчатые колеса и другие детали вращения. При этом валы, вращаясь, транслируют крутящий момент, а оси, в отличие от них, могут быть как подвижными, так и неподвижными.
И оси, и валы являются широко распространенными элементами, используемыми в конструкции современных роботов. Основной сферой применения осей является соединение рабочих элементов, которые входят в состав механических захватных устройств. Помимо этого они являются наиболее типичными компонентами практически всех механизмов роботов.
Опоры для вращательного и поступательного движения
В качестве опор для валов и осей, которые имеются в конструкции механизмов роботов, служат подшипники. В зависимости от того, какая именно нагрузка на них оказывается, они могут быть упорными, радиальными или радиально-упорными. Кроме того, в зависимости от степени трения они подразделяются на подшипники качения и скольжения.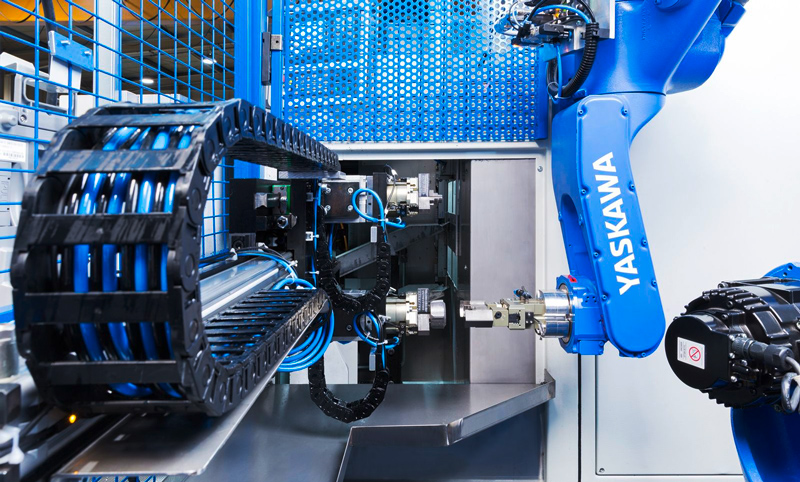
Направляющие для поступательного движения
Эти конструкции предназначаются для того, чтобы обеспечивать прямолинейное движение тех элементов, которые наличествуют в конструкции механизмов роботов. Их чаще всего можно встретить в манипуляторах промышленного назначения.
Основными составными частями прямолинейных направляющих являются направляющая дорожка и ведомая часть. Что касается направляющих дорожек, то они бывают с трением скольжения и с направляющими качения. Во втором случае движение обеспечивается за счет наличия таких деталей, как ролики, шарики и валы.
Пружины в механизмах роботов
Пружины в механизмах современных промышленных роботов используются для того, чтобы обеспечить демпфирование и ограничить при этом ход различных подвижных звеньев. Кроме того эти детали широко применяются для того, чтобы сглаживать неравномерности, возникающие при трансляции крутящего момента.
Муфты для механизмов роботов
Чтобы должным образом передать мощность от ведущего вала к валу ведомому используются такие конструкции, как муфты.
Те муфты, которые применяются в современных роботах, должны соответствовать общим требованиям, предъявляемым к механизмам такого рода. Им надлежит иметь повышенную надежность, обеспечивать минимально возможные деформации сопряжения, иметь как можно более компактные размеры и небольшую массу. Что касается типа той или иной муфты, используемой в современном роботе, то его выбор зависит от таких факторов, как требуемая точность позиционирования, жесткость конструкции, а также необходимость установки устройств в определенных пространственных положениях и обеспечение доступа к различным узлам и деталям для их обслуживания и ремонта.
Пневматические приводы роботов
Пневматические приводы, используемые в конструкции современных промышленных роботов, – это определенная комбинация неких устройств, которые тесно взаимосвязаны между собой и предназначены для того, чтобы приводить в движение различные рабочие звенья и рабочие органы. Пневматическими приводами оборудуется значительная часть роботов, поскольку они обладают отличными динамическими характеристиками, просты по своей конструкции, имеют высокое быстродействие, обходятся в производстве и эксплуатации недорого, и при этом весьма надежны.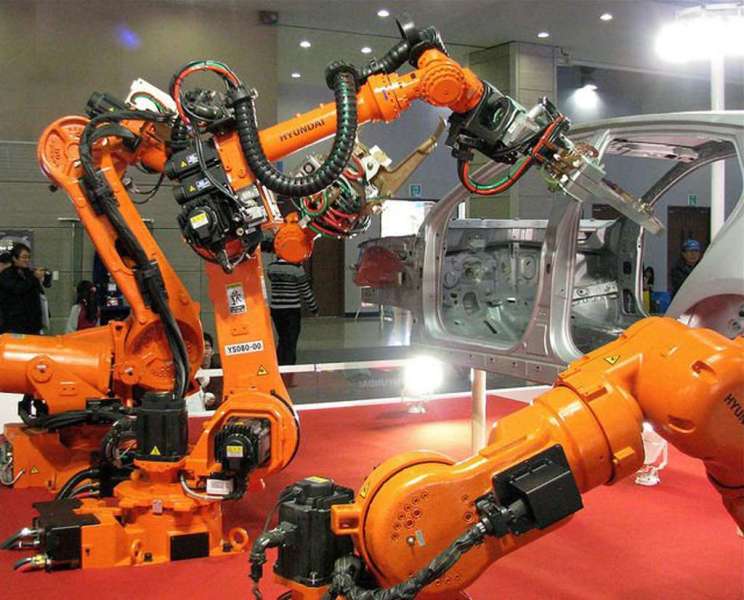
Электромеханические приводы роботов
Основным звеном всех таких приводов является электродвигатель. Он может быть любого из распространенных на сегодняшний день типов: постоянного тока, шаговым, вентильным, асинхронным.
Все приводы, которые используются в современных промышленных роботах, должны соответствовать целому ряду довольно жестких требований относительно таких параметров, как габариты и масса, возможность выдерживать высокие нагрузки, надежность, стоимость и удобство в эксплуатации.
робот | Определение, история, использование, типы и факты
Робот-гуманоид
Просмотреть все СМИ
- Ключевые люди:
- Родни Брукс
- Похожие темы:
- реабилитационный робот три закона робототехники андроид AIBO механический манипулятор
Просмотреть весь связанный контент →
Резюме
Прочтите краткий обзор этой темы
робот , любая автоматическая машина, которая заменяет человеческие усилия, хотя она может не напоминать человека по внешнему виду или выполнять функции, как человек. В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
Понятие об искусственных людях появилось раньше письменной истории ( см. автомат ), но современный термин Робот происходит от чешского слова robota («принудительный труд» или «крепостной»), использованного в пьесе Карела Чапека руб. (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из « Франкенштейна » (1818) Мэри Шелли, или механическими, не уточнялось, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
Узнайте о трех законах робототехники Айзека Азимова
Посмотреть все видео к этой статье Слово робототехника впервые появилось в научно-фантастическом рассказе Айзека Азимова Runaround (1942). Наряду с более поздними рассказами Азимова о роботах он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
Наряду с более поздними рассказами Азимова о роботах он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону.
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В этой статье прослеживается развитие роботов и робототехники. Для получения дополнительной информации о промышленном применении, см. артикул автоматика.
Викторина «Британника»
Гаджеты и технологии: правда или вымысел?
Виртуальная реальность используется только в игрушках? Использовались ли когда-нибудь роботы в бою? От компьютерных клавиатур до флэш-памяти — узнайте о гаджетах и технологиях в этой викторине.
Посмотрите, как мехатроника помогает инженерам создавать высокотехнологичные продукты, такие как промышленные роботы
Просмотреть все видео к этой статье Машины с гибким поведением и некоторыми физическими свойствами, хотя и не гуманоидными, были разработаны для промышленности. Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 американским инженером Джорджем Деволом и был разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением.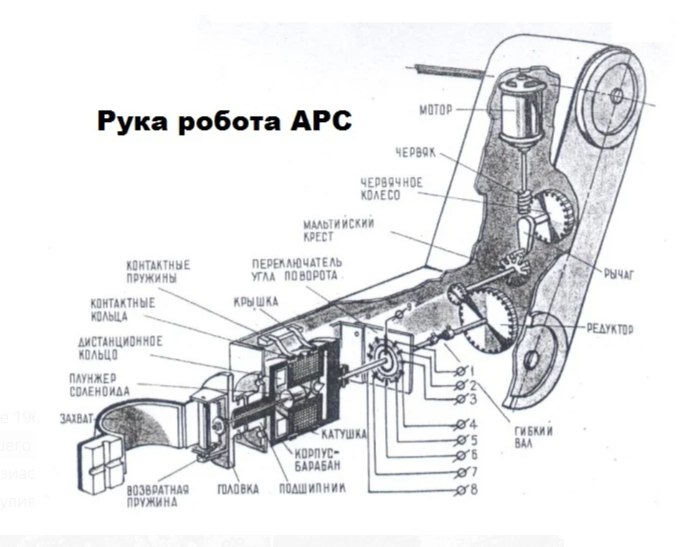
Узнайте, как использование роботизированного конвейера для генетики бактерий делает работу ученых в Университетском колледже Корка менее сложной и более эффективной.
Просмотреть все видео к этой статье. в конце 1960-х и 1970-х годах в Массачусетском технологическом институте (MIT) и в Стэнфордском университете, где они использовались с камерами в исследованиях роботизированных рук и глаз. Виктор Шейнман из Стэнфорда, работая с Unimation для GM, разработал первую такую руку, используемую в промышленности. Называется PUMA (программируемая универсальная машина для сборки), они используются с 1978 для сборки автомобильных компонентов, таких как приборные панели и фары. PUMA широко копировалась, и ее потомки, большие и маленькие, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов небольшие электрические манипуляторы стали важными инструментами в лабораториях молекулярной биологии, поскольку они точно манипулируют массивами пробирок и пипетируют сложные последовательности реагентов.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подписаться сейчас
Мобильные промышленные роботы также впервые появились в 1954. В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 1990-х годах для использования на складах стал популярным новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от фиксированных ретрорефлекторов (по крайней мере, три из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в США, бизнес там не процветал. Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9.
Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1990 году шведской фирме Asea Brown Boveri Ltd. единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, и в 19В 80-е годы другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 1980-х годов Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала внедрению роботов-заменителей: в 2001 году количество установок промышленных роботов в Европейском Союзе впервые превысило количество установок в Японии9. 0003
0003
Отсутствие надежной функциональности ограничило рынок промышленных и сервисных роботов (созданных для работы в офисе и дома). С другой стороны, игрушечные роботы могут очень надежно развлекаться, не выполняя задачи, а механические разновидности существуют уже тысячи лет. ( См. автомат.) В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознавали голоса и слова. В 19В 99 году корпорация Sony представила похожего на собаку робота по имени AIBO с двумя дюжинами моторов для приведения в действие его ног, головы и хвоста, двумя микрофонами и цветной камерой, координируемой мощным микропроцессором. Более реалистичные, чем когда-либо прежде, AIBO гонялись за цветными мячами и научились узнавать их владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первоначальный тираж в 5000 экземпляров сразу же был распродан через Интернет.
резюме робота | Британика
- Развлечения и поп-культура
- География и путешествия
- Здоровье и медицина
- Образ жизни и социальные вопросы
- Литература
- Философия и религия
- Политика, право и правительство
- Наука
- Спорт и отдых
- Технология
- Изобразительное искусство
- Всемирная история
- Этот день в истории
- Викторины
- Подкасты
- Словарь
- Биографии
- Резюме
- Популярные вопросы
- Обзор недели
- Инфографика
- Демистификация
- Списки
- #WTFact
- Товарищи
- Галереи изображений
- Прожектор
- Форум
- Один хороший факт
- Развлечения и поп-культура
- География и путешествия
- Здоровье и медицина
- Образ жизни и социальные вопросы
- Литература
- Философия и религия
- Политика, право и правительство
- Наука
- Спорт и отдых
- Технология
- Изобразительное искусство
- Всемирная история
- Britannica Classics
Посмотрите эти ретро-видео из архивов Encyclopedia Britannica.
- Britannica объясняет
В этих видеороликах Britannica объясняет различные темы и отвечает на часто задаваемые вопросы. - Demystified Videos
В Demystified у Britannica есть все ответы на ваши животрепещущие вопросы. - #WTFact Видео
В #WTFact Britannica делится некоторыми из самых странных фактов, которые мы можем найти. - На этот раз в истории
В этих видеороликах узнайте, что произошло в этом месяце (или любом другом месяце!) в истории.
- Студенческий портал
Britannica — это лучший ресурс для учащихся по ключевым школьным предметам, таким как история, правительство, литература и т. д. - Портал COVID-19
Хотя этот глобальный кризис в области здравоохранения продолжает развиваться, может быть полезно обратиться к прошлым пандемиям, чтобы лучше понять, как реагировать сегодня. - 100 женщин
Britannica празднует столетие Девятнадцатой поправки, выделяя суфражисток и политиков, творящих историю.