
Устройство и принцип работы электродвигателя переменного тока
Содержание
- 1 Электрические двигатели: разновидности
- 1.1 Коллекторные двигатели
- 1.2 Асинхронные двигатели
- 1.3 Синхронные двигатели
- 2 Как работают электрические двигатели
- 2.1 Асинхронные двигатели
- 3 Работа синхронных двигателей
Двигатели электрические выпускают синхронные, асинхронные, коллекторные, каждому присущи особенности работы. Минус большой: сеть интернет дает скудные представления о различиях в работе, принципе действия. Можем читать обзоры про синхронные электродвигатели, не понять в итоге главного: нюансов! Почему на ГЭС используются такие генераторы, в быту моторов-зеркал не видно (двигатель переменного тока обратим)?
Электрические двигатели: разновидности
Сразу скажем, не ставили целью довести вниманию читателей исчерпывающую информацию по указанной теме. Невозможно объять необъятное. Будут рассматриваться случаи, опущенные литературой. Информация вроде выложен, систематизировать издателям недосуг. Поможем понять, как функционируют виды электродвигателей. Начнем простым перечислением.
Информация вроде выложен, систематизировать издателям недосуг. Поможем понять, как функционируют виды электродвигателей. Начнем простым перечислением.
Двигатель коллекторного типа
Коллекторные двигатели
Часто путают с синхронными. Обнаруживаются угольные щетки. Этим сходство ограничивается, частота вращения коллекторных двигателей меняется в широких пределах, каждый может лицезреть на примере стиральной машины. Управление скоростью осуществляется путем коммутации обмоток, подстройкой значения действующего напряжения (изменяется угол отсечки вольтажа промышленной частоты).
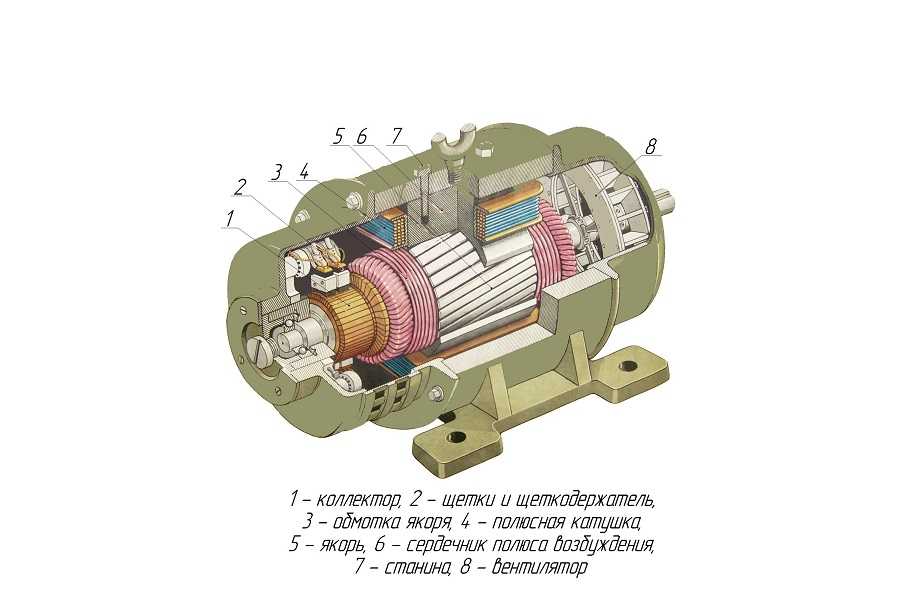
Главным отличием устройств является наличие коллектора. Своеобразная секционная конструкция, насаженная на вал. Составлена множеством катушек, равномерно идущих кругом. Коллектор обеспечивает последовательную коммутацию, чтобы поле постепенно двигалось вкруг вала. Цепляясь за статор, ротор начинает движение.
К недостаткам коллекторных двигателей причисляют хрупкость (для промышленности). В быту тип устройств доминирующие. Простым путем осуществляется регулировка скорости (отсечкой части периода синусоиды). Коллекторных двигателей видим другие минусы/плюсы, упоминали ранее, сейчас изучим особенности. Наличие на валу секционированного барабана.
В быту тип устройств доминирующие. Простым путем осуществляется регулировка скорости (отсечкой части периода синусоиды). Коллекторных двигателей видим другие минусы/плюсы, упоминали ранее, сейчас изучим особенности. Наличие на валу секционированного барабана.
Можно поставить вместо него магнит, вращать поле статора? Да, получим синхронный двигатель (типичный пример – помпы стиральных машин). Можно питать обмотку постоянным током, вращать поле статора? Да, будет синхронный двигатель. Видите, коллектор однозначно дает понять тип устройства.
Асинхронные двигатели
Чаще применяются промышленностью. Получаем простоту конструкции, кучу плюшек. Ударопрочность, вибропрочность: отсутствие угольных щеток. Взамен получается кипа конструкций. Семейство самое многочисленное.
Асинхронный двигатель
Во-первых, ротор. Может быть короткозамкнутым, фазным. Первое означает: на вал насажена конструкция (для уменьшения веса силуминовая), где вставлены прожилки меди. Закорочено периметром двумя кольцами. Получается барабан, иногда называемый беличьей клеткой.
Получается барабан, иногда называемый беличьей клеткой.
Возникает поле под действием вращающейся ЭДС статора, в отличие от коллекторных запуск асинхронных двигателей постоянным током не производят. Вторичное отличие. Первичное назвали: к ротору не подходят контакты (исключая пусковой реостат), вал увенчан беличьей клеткой, вывод о принадлежности однозначный. Что касается фазных асинхронных машин, питание катушек ротора производится через токосъемные кольца. Вал подхватывается, постепенно набирает обороты.
Синхронные двигатели
Тип устройств, составить понятие о котором, согласно заметкам сети попросту невозможно. Отличие простое: поле настолько сильное, что захватывается без проблем, не проскальзывает, как в случае с асинхронными или (в меньшей степени) коллекторными двигателями. Обеспечивается постоянным магнитом чаще, либо обмотка возбуждения находится на роторе. Статор снабжается переменным напряжением нужной частоты.
Скорость вращения зависит от частоты сети питания. Полюсов только два, поэтому составляет 25 Гц (1500 об/мин). Черта, по которой можно предположить: видим синхронный двигатель – кратное, целое число. Ключевым является совпадение скорости вращения вала и частоты напряжения питания. Многое зависит от количества полюсов. Например, на ГЭС генераторы работают на частоте вала 1-2 Гц, промышленные 50 Гц получаются путем намотки многочисленных катушек статора, соединенных параллельно.
Полюсов только два, поэтому составляет 25 Гц (1500 об/мин). Черта, по которой можно предположить: видим синхронный двигатель – кратное, целое число. Ключевым является совпадение скорости вращения вала и частоты напряжения питания. Многое зависит от количества полюсов. Например, на ГЭС генераторы работают на частоте вала 1-2 Гц, промышленные 50 Гц получаются путем намотки многочисленных катушек статора, соединенных параллельно.
Как работают электрические двигатели
Асинхронные двигатели
Кратенько описали внешние отличия электрических двигателей, теперь пара слов по поводу устройства и функционирования. Асинхронные двигатели при помощи статора создают по оси вращающееся магнитное поле. Барабан беличьей клетки редко изготавливается из ферромагнитных материалов (если вообще имеет место быть). В противном случае нагрев вышел бы значительным. Фактически получается индукционная печь.
Силуминовый барабан вдоль линий магнитного поля содержит медные проводники. Разница в проводимости такова, что не проводится изоляции: ток несут красно-коричневые жилы. Поле, индуцированное статором ЭДС, слабое. Применяются специальные меры, помогающие разогнать вал. Магнитное поле ротора плохо цепляется, асинхронный двигатель стоит столбом. Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
Разница в проводимости такова, что не проводится изоляции: ток несут красно-коричневые жилы. Поле, индуцированное статором ЭДС, слабое. Применяются специальные меры, помогающие разогнать вал. Магнитное поле ротора плохо цепляется, асинхронный двигатель стоит столбом. Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
На запуске частота тока, глубина проникновения поля велики. Включаются в работу оба слоя беличьей клетки. По мере разгона разница нивелируется, падает до нуля. Амплитуда поля снижается, рабочим остается внешний слой беличьей клетки. Обратите внимание, догнать поле ротор бессилен, проскальзывает, запаздывает. Поэтому двигатели получили название асинхронных. Англичане делают проще – зовут индукционными.
Если поле вращать со скоростью ротора, ЭДС перестает наводиться. Последует замедление, цикл повторится, начавшись разгоном. Ротор по-прежнему будет отставать от поля. Так работает устройство короткозамкнутого типа. Фазный ротор (спасибо Википедия), содержащий трехфазную обмотку, выполняет несколько функций, согласно назначению устройства:
Ротор по-прежнему будет отставать от поля. Так работает устройство короткозамкнутого типа. Фазный ротор (спасибо Википедия), содержащий трехфазную обмотку, выполняет несколько функций, согласно назначению устройства:
- Подпитывается электричеством через кольцо токосъемника. Теперь ротор получает фазу и наводит на статоре ЭДС. Постепенно вал подхватывается полем, дальнейший процесс описан выше.
- Подпитывается постоянным током. Образуется синхронный двигатель.
- Снабжается реостатами, дросселями, регулирующими скорость.
- Реализует управление инвертором (усложненный первый случай).
Принцип действия асинхронных двигателей: используется наведенная ЭДС, скорость вращения неспособна догнать поле (пропадают токи). Иначе тип мотора меняется (синхронный). Для регуляции скорости часто используется амплитуда питающего напряжения. Способ годится двигателям асинхронного типа с короткозамкнутым, фазным ротором. Перечислим методики:
Работа двигателя переменного тока
- Для машин с короткозамкнутым ротором годятся:
- Регулирование частоты напряжения питания.

- Изменение числа пар полюсов статора. В результате меняется скорость вращения поля, давая нужный эффект.
- Регулирование частоты напряжения питания.
- Для машин с фазным ротором допускается:
- Вводить реостат в цепь питания. Растут потери на скольжение, закономерно изменяя скорость.
- Применять специальные вентили. Энергия скольжения выпрямляется схемой Ларионова, подается в виде постоянного напряжения вспомогательному электрическому двигателю, нарезающему импульсы через управляемые извне тиристоры. Мощность, которая обычно терялась бы, возвращается. Через вал вспомогательного двигателя, трансформатор, обмотки которого частично включены в сеть питания. Управление скоростью выполняют внедрением дополнительной ЭДС. Делается либо напрямую (через источник питания), либо сдвигом угла включения тиристоров относительно питания. Частота отклоняется от номинала.
- Двигатель двойного питания является вариантом реализации регулировки скорости в оборудовании с фазным ротором. Тип чаще применяется для реализации схем генераторов.
 Ротор уплывает частотой вращения – двигатель все-таки асинхронный. Статор, ротор питаются отдельно. Позволяет для каждой обмотки задавать частоту, закономерно приводит к нужным изменениям скорости.
Ротор уплывает частотой вращения – двигатель все-таки асинхронный. Статор, ротор питаются отдельно. Позволяет для каждой обмотки задавать частоту, закономерно приводит к нужным изменениям скорости.
Асинхронным двигателям годится изменение амплитуды питания. Наибольшим КПД обладают вентильные схемы, самые дорогие.
Двигатель асинхронного типа
Работа синхронных двигателей
Проходились по коллекторным двигателям – рассказывали, как конструировать – поэтому пропускаем сегодня семейство. Бессильны иначе рассказать вещи гораздо интереснее: ведется много споров на форумах. Собираемся рассмотреть не совсем синхронные двигатели – генератор. Наподобие украшающих ГЭС.
Вы никогда не задумывались, как регулируется скорость вращения турбины, когда на лопасть падает поток воды? Створками направляющего аппарата? Нет. Генератор требует подпитки не только постоянным током, но и переменным. Первое подаётся на ротор, а второе – на статор. В результате вал не мог бы даже стронуться с места, но ему помогает вода. А вот энергия торможения потока уже преобразуется в ЭДС рабочих катушек статора, намотанных рядом со вспомогательными.
А вот энергия торможения потока уже преобразуется в ЭДС рабочих катушек статора, намотанных рядом со вспомогательными.
Фактически имеем на руках устройство электродвигателя переменного тока, среди обмоток большая часть генерирующих, снимается частота 50 Гц. Синхронность обеспечивается питающими напряжениями. Если вода слишком напирает, ток возбуждения растет, срыв оборотов предотвращается. Параллельно увеличивается выходная мощность электростанции. Частота определяет характеристики снимаемого напряжения, касательно номинала 50 Гц не допускаются отклонения более долей процента (0,1%).
Вал вращается со скоростью 1-2 оборота в секунду. Многочисленными генераторными обмотками, соединенными параллельно образует нужную форму синусоиды. Подчеркиваем, частота поддерживается напряжением возбуждения, следовательно, именно к нему и предъявляются повышенные требования. Требуется получить больше мощности электростанции, просто заслонки направляющего аппарата приоткрываются, масса воды начинает падать вниз. Лопасть быстрее не двигается, увеличивается ток возбуждения, закономерно вызывает возникновение более сильных полей.
Лопасть быстрее не двигается, увеличивается ток возбуждения, закономерно вызывает возникновение более сильных полей.
Принцип действия электродвигателя переменного тока копирует сказанное, отсутствуют генераторные обмотки. Требуется получить больше мощности – увеличьте напряжение возбуждения, амплитуду по цепи питания. Усиливается сцепление полей, исключая проскальзывание. Понятно, большая масса вала неспособна набрать за мгновение 50 Гц (и не набирает), оборудование, изготовленное правильно, за короткий период достигает режима. Скорость зависит от количества полюсов.
Не успели сегодня рассмотреть технические характеристики электродвигателей переменного тока, многократно делали прежде, применительно к различного рода устройствам. Полагаем, в будущем обзоры могут вновь повернуться к теме бушпритом.
Устройство электродвигателя — Electricdom.
 ru
ruЭлектрические машины делятся на две большие категории:
1. Генераторы, которые служат для преобразования механической энергии в электрическую энергию.
2. Двигатели преобразуют электрическую энергию в механическую энергию.
Двигатели переменного тока делятся на асинхронные и синхронные.
Асинхронным называется двигатель, одна из обмоток которого обмотка статора, подключается к источнику переменного тока, а другая обмотка, обмотка ротора выполняется короткозамкнутой (в виде беличьей клетки) или фазной, выводы которой подключаются к контактным кольцам. Статор асинхронного двигателя создает вращающееся магнитное поле, а ротор вращается с меньшей скоростью, т.е. асинхронно. Увеличение нагрузки двигателя вызывает уменьшение скорости вращения ротора.
В синхронном двигателе скорость вращения ротора совпадает со скоростью вращения магнитного поля статора и не зависит от нагрузки двигателя.
Все электрические двигатели могут служить, как двигателями, так и генераторами. Электрические машины являются основными потребителями электрической энергии.
Асинхронные электродвигатели
Асинхронные электродвигатели (АД) наиболее распространены, дешевле по стоимости, просты по устройству, неприхотливы в эксплуатации. Основной недостаток – практически не регулируемая частота вращения. Бывают одно и много фазными. Основные их элементы – статор (неподвижная часть), которая создает магнитное поле, и ротор (вращающаяся часть). Применяются для привода рабочих машин различного назначения (насосы, деревообрабатывающие станки, дробилки и т.д.). Выпускаются на мощности от 0,2 до 200 кВт и более.
Устройство асинхронного двигателя:
1. Статор с рабочими обмотками.
2. Вентилятор на валу ротора.
3. Ротор.
4. Щиты с подшипниками для вала ротора.
В общем случае обмотка статора состоит из трех секций, сдвинутых относительно друг друга на 120 градусов. В этом случае создается двухполюсное магнитное поле. Для создания четырехполюсного магнитного поля надо увеличить число секций обмотки до 6 и т.д. Начала и концы обмоток статора трехфазного асинхронного двигателя выводятся на щиток корпуса. Ротор асинхронного двигателя представляет собой сердечник, собранный из стальных пластин.
В этом случае создается двухполюсное магнитное поле. Для создания четырехполюсного магнитного поля надо увеличить число секций обмотки до 6 и т.д. Начала и концы обмоток статора трехфазного асинхронного двигателя выводятся на щиток корпуса. Ротор асинхронного двигателя представляет собой сердечник, собранный из стальных пластин.
Соединение звездой обмоток асинхронного электродвигателя
А, B, C — начала обмоток
X, Y, Z — концы обмоток
Концы статорных обмоток x, y, z соединяются в одну точку, к началам обмоток А, B, C подключаются линейные провода. Сопротивление между концами обмоток и любым из линейных поводов — начала обмоток, должно иметь какую-то величину. Также сопротивление между корпусом и началами обмоток должно иметь какую-то величину.
Соединение треугольником обмоток асинхронного электродвигателя
А, B, C — начала обмоток
X, Y, Z — концы обмоток
Конец X первой обмотки соединен с началом B второй обмотки, конец Y второй обмотки с началом C третьей обмотки, конец Z третьей обмотки с началом А первой.
Работа асинхронного электродвигателя
После монтажа нового двигателя вместе с новым механизмом или после замены двигателя производится его подготовка к включению с целью выявления неисправностей при монтаже не только двигателя, но и электрического и механического оборудования.
При подготовке двигателей к работе производится:
1. Внешний осмотр.
2. Проверка схемы соединения обмоток.
3. Измерение сопротивления изоляции.
4. Пробный пуск двигателя.
5, Проверка работы двигателя на холостом ходу и под нагрузкой.
Проверка схемы соединения обмоток двигателя
Большинство двигателей в коробках зажимов имеют шесть выводов, соответствующих началам и концам фазных обмоток.
Обычно выводы всех фаз обмотки статора расположены в коробке зажимов (рис. а). Такое расположение дает возможность получить соединение фазных обмоток статора звездой при соединении горизонтально перемычками нижних зажимов (рис. б) и треугольником при соединении вертикальных пар зажимов (рис. в).
в).
В некоторых двигателях обмотки фаз статора соединены звездой и в коробке зажимов находятся только выводы С1, С2 и С3.
Следует учесть, что выводные концы обмоток фаз двигателя одеваются на шпильки и прижимаются гайками, которые могут быть слабо затянуты, поэтому нужно проверять их крепление пошатыванием. При слабом креплении нужно отсоединить подводящие провода и перемычки и затянуть гайки крепления.
Пробный пуск двигателя
Электродвигатель включают на 2-3 секунды и проверяют:
1. Направление вращения двигателя.
2. Работу вращающихся частей двигателя и вращающихся и движущихся частей
механизма.
3. Действие пусковой аппаратуры.
При любых признаках неисправности электрической или механической части двигатель останавливают и неисправности устраняют.
Нужное направление вращения двигателя бывает на нем обозначено стрелкой. Нужно также помнить, что при правильном направлении вращения колес двигателей их лопатки загнуты в обратную сторону относительно направления вращения.
Для изменения вращения двигателя надо отсоединить от зажимов два провода, подводящих напряжение к двигателю, поменять их местами и снова присоединить. Обычно это делается на выходе магнитного пускателя. Кратковременное включение повторяют 2—3 раза, увеличивая продолжительность включения.
При написании статьи использовалась часть материалов из книги Синдеева Ю.Г.
«Электротехника с основами электроники».
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Посмотреть все СМИ
- Ключевые сотрудники:
- Никола Тесла Томас Давенпорт Ипполит Фонтейн Майкл Фарадей
- Похожие темы:
- синхронный двигатель линейный двигатель вращательный двигатель коммутатор арматура
См. всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников, несущих ток, в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени
На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени  Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера.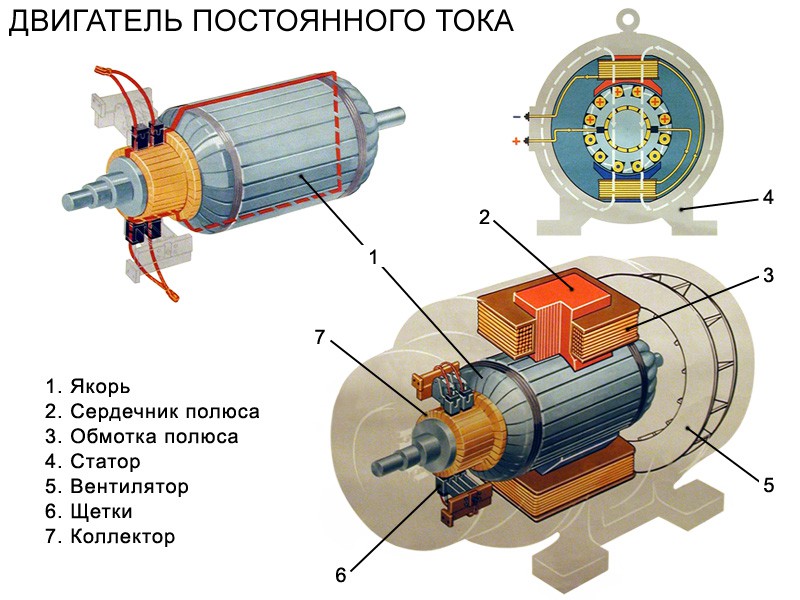
Другие синхронные скорости можно получить с источником постоянной частоты, создав машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / 
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Смотреть все СМИ
- Ключевые люди:
- Никола Тесла Томас Давенпорт Ипполит Фонтейн Майкл Фарадей
- Похожие темы:
- синхронный двигатель линейный двигатель вращательный двигатель коммутатор арматура
См. всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников с током в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени.
В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера.