
Проезд равнозначного т образного перекрестка
Комментариев нет
Проезд равнозначного Т образного перекрестка. Ситуация читателя:
Т-образный нерегулируемый перекресток, двигаюсь по «ножке», т.е. по дороге, которая примыкает. Слева, по «прямой» дороге едет автомобиль. Знаков никаких нет.
Вопрос: Должен ли я ему уступить дорогу?
Ответ. Автор вопроса не указал, где располагается его перекресток: в населенном пункте или за его пределами. Иногда это помогает прояснить ситуацию.
Начнем с того, что Т-образный перекресток образуется либо путем примыкания одной дороги к другой, либо путем разветвления одной дороги на две или слияния двух дорог в одну (смотря, с какой стороны едет автомобиль), что-то типа трехлучевой «звездочки».
Подавляющее большинство таких перекрестков имеют главную и второстепенную дорогу.
В населенном пункте на дорогах, образующих неравнозначный перекресток перед каждым перекрестком устанавливают знаки 2. 1 «Главная дорога» и 2.4 «Уступите дорогу».
1 «Главная дорога» и 2.4 «Уступите дорогу».
Вне населенных пунктов знак 2.1 устанавливают вначале дороги, а перед перекрестками и боковыми примыканиями расставляют знаки из группы 2.3.1 — 2.3.7 (пересечение и примыкание второстепенной дороги).
Данные знаки располагают на расстоянии 150-300 метров до перекрестка, поэтому с второстепенной дороги место его установки не видно. А знак 2.4 «Уступите дорогу» на второстепенной дороге может по разным причинам отсутствовать.
Это было предисловие к проезду равнозначного Т-образного перекрестка, дающее понимание, что на самом деле перекресток может оказаться неравнозначным.
Как разобраться в статусе дорог перекрестка можно прочесть в статьях Правила проезда нерегулируемых перекрестков и Как определить главную дорогу, если нет знаков.
Если коротко, то главная и второстепенная дороги определяются наличием покрытия, и (или) установленными перед перекрестком знаками приоритета.
Если покрытие дорог, образующих перекресток, одинаковое, а знаки приоритета отсутствуют, то такое пересечение является перекрестком равнозначных дорог или равнозначным перекрестком.
Так же, перекресток будет равнозначным, если на приближении к нему будет установлен предупреждающий знак 1.6 «Пересечение равнозначных дорог».
Таким образом, равнозначный Т-образный перекресток — это перекресток, образованный путем равнозначного разветвления дороги или примыкания двух дорог равных по значению.
Под какими углами эти дороги соединяются уже не имеет значения.
Наибольшая вероятность повстречать равнозначный Т-образный перекресток представляется в населенном пункте, и в основном в местах с невысокой интенсивностью движения.
Например, в разветвленной сети улиц, входящих в жилую зону. См. статью Движение во дворах и жилых зонах.
Вне населенного пункта вместо равнозначного Т-перекрестка намного чаще можно повстречать разновидность Т-образного перекрестка, на котором главная дорога меняет свое направление.
Возвращаемся к вопросу приоритета на Т-образном перекрестке.
Первое, на что нужно обратить внимание, это на покрытие дороги и наличие знаков приоритета перед перекрестком.
Если покрытие одинаковое, например, асфальт или грунт, и знаков приоритета на углах перекрестка нет, то перекресток считается равнозначным и на нем действует требование пункта 13.11 ПДД.
Требование этого пункта получило в народе название правило «помеха справа» (см. статью Помеха справа в ПДД).
На перекрестке равнозначных дорог, за исключением въезда на круговой перекресток, водитель безрельсового ТС обязан уступить дорогу транспортным средствам, приближающимся справа.
Все, что написано выше, это в теории. Когда равнозначный перекресток четырехсторонний, то водители в большинстве придерживаются этого правила.
На практике на Т-образном перекрестке многие забывают о существовании пункта 13.11, и даже не считают такой перекресток равнозначным.
У многих автомобилистов в голове укоренилось так называемое придуманное «правило прямой дороги» и они могут проехать даже не заметив автомобиль, который приближается справа.
Поэтому на равнозначном перекрестке нет смысла упорствовать на своем преимуществе.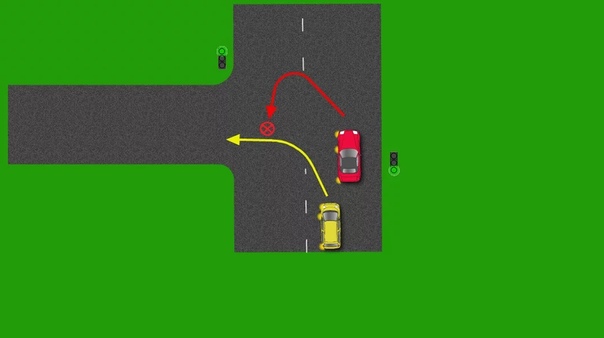
Ваш коллега, который подъезжает слева, может не знать, что перекресток, к которому он подъезжает, это перекресток равнозначных дорог, и что ему нужно уступить своей «помехе справа».
Теперь, собственно, сам проезд равнозначного т образного перекрестка.
Имея преимущество, не следует спешить проехать равнозначный перекресток, так сказать, сходу. Сначала нужно убедиться в том, что вам уступают дорогу.
Когда произойдет ДТП, то какая разница, кто был прав, или у кого был приоритет?! Машины уже столкнутся!
Действовать нужно так: Подъехали к такому т-перекрестку по «ножке», и намереваетесь, предположим, повернуть налево. Снижаете скорость почти до «0». Видите, что слева приближается другой автомобиль.
Если времени достаточно, т.е. вы уверены, что успеете проехать перекресток, смело выезжаете на него, поворачиваете и занимаете правую половину дороги.
Если видите, что тот водитель не собирается снижать скорость (по разным причинам), не спешите использовать свой приоритет. Остановитесь перед пересечением дорог.
Остановитесь перед пересечением дорог.
Когда убедитесь, что тот водитель притормозит и уступит вам дорогу, можете продолжить движение. Если не уступит – то вы ничего не потеряете, проедете перекресток вслед за ним.
В свою очередь, когда вы проезжаете равнозначный т-образный перекресток по «прямой» дороге, а другая дорога примыкает справа, то имейте в виду, что ваш коллега, подъезжающий справа и имеющий приоритет, может без промедления выехать на перекресток.
Он, ведь, может быть уверен, что преимущество на его стороне.
И если вы, в этом случае, сами забудете о «помехе справа», то столкновение гарантировано. Поэтому, «включаем» внимательность и холодный расчет.
Вот, собственно, и все.
Оставайтесь на страницах сайта. Вы найдете для себя много интересного и полезного в плане собственной безопасности на дорогах.
Свой вопрос вы можете задать в форме для комментариев, которая находится в самом конце текстовой «ленты».
В продолжение темы «проезд равнозначного т образного перекрестка», а также ответов на вопросы по обеспечению собственной безопасности в процессе движения по дорогам предлагаю ознакомиться с содержанием следующих статей:
Правила проезда нерегулируемых перекрестков;
Повороты направо, налево или на разворот;
Разъезд на равнозначном перекрестке;
Проезд равнозначного перекрестка;
Что такое безопасный маневр;
Причины возникновения ДТП.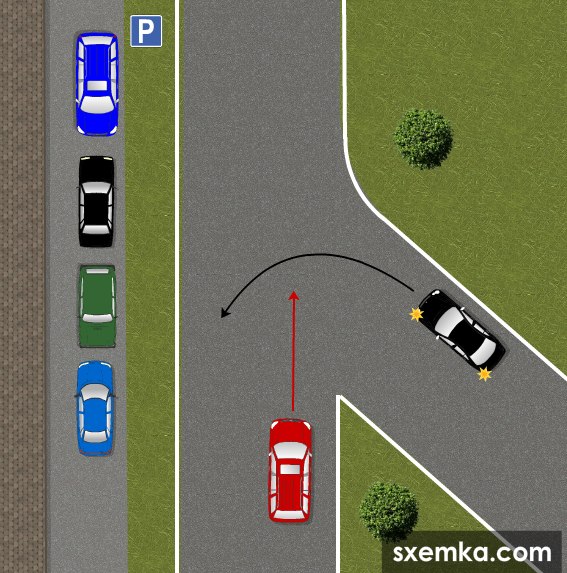
Будьте внимательны за рулем.
Автор: Сергей Довженко
Если есть желание поделиться прочитанным, ниже кнопки на выбор. Жмем, не стесняемся.
Как проезжать Т-образные перекрестки по ПДД — новости на сайте AvtoBlog.ua
- Acura
- Alfa Romeo
- Aston Martin
- Audi
- Bentley
- BMW
- Brabus
- Bugatti
- Cadillac
- Chery
- Chevrolet
- Chrysler
- Citroen
- Dacia
- Daewoo
- Daihatsu
- Datsun
- Dodge
- Ferrari
- Fiat
- Ford
- Geely
- Great Wall
- Haval
- Honda
- Hummer
- Hyundai
- Infiniti
- Jaguar
- Jeep
- Kia
- Lamborghini
- Land Rover
- Lexus
- Lincoln
- Maserati
- Maybach
- Mazda
- Mercedes-Benz
- MINI
- Mitsubishi
- Nissan
- Opel
- Peugeot
- Porsche
- Renault
- Rolls-Royce
- Saab
- SEAT
- Skoda
- Smart
- SsangYong
- Subaru
- Suzuki
- Tesla
- Toyota
- Volkswagen
- Volvo
- ВАЗ (Lada)
- ЗАЗ
- ЗИЛ
- КамАЗ
- ЛуАЗ
- Москвич
- УАЗ
Эксперты рассказали особенности проезда Т-образных перекрестков. Именно этот вид перекрестков вызывает больше всего вопросов у начинающих водителей.
Именно этот вид перекрестков вызывает больше всего вопросов у начинающих водителей.
ПДД не выделяют Т-образные перекрестки. Правила проезда этого вида пересечения дорог аналогичны, как и для обычных перекрестков.
Т-образные перекрестки условно делят на три вида:
- Нерегулируемый;
- Регулируемый дорожными знаками;
- Регулируемый светофором.
Нерегулируемые Т-образные перекрестки стоит считать пересечением равнозначных дорог. На таких перекрестках действует только одно правило – помеха с права.
Также в этом случае, стоит обратить внимание на тип дорожного покрытия. Дорога с усовершенствованным дорожным покрытием будет главнее, чем грунтовая.
Т-образные перекрестки регулируемый дорожными знаками могут быть такими, когда главная дорога остается прямой, а второстепенная примыкает со стороны. В этой ситуации водители разъезжаются по правилам проезда нерегулируемых перекрестков.
Если же главная дорога меняет направление, то первыми перекресток проезжают машины, которые едут или съезжают с главной дороги.
Если на Т-образном перекрестке есть светофор, то проезжать его нужно по правилам проезда регулируемых перекрестков.
Источник: auto.bigmir.net
РЕКОМЕНДУЕМ ПОЧИТАТЬ
Ferrari посвятит 500-й экземпляр LaFerrari жертвам землетрясения
Porsche представит новый 911-й
Французы отвоевали право ездить со скоростью 90 км/ч
Характеристики транспортного потока на нерегулируемом Т-образном перекрестке с разворотным движением
На этой странице
АннотацияВведениеМодельОбсуждениеЗаключениеБлагодарностиСсылкиАвторское правоСтатьи по теме В данной работе предлагается новая модель клеточного автомата (КА) для характеристики транспортного потока на перекрестке данного типа. В нынешней модели CA новые правила разработаны, чтобы избежать конфликтов между транспортными средствами с разными направлениями движения и устранить тупиковую ситуацию. Сравниваются два вида показателей производительности (т. е. поток и средняя задержка управления) для пересечения. Последствия разворотов анализируются при различных начальных условиях. Результаты моделирования показывают, что (i) средняя задержка управления более практична, чем поток, при измерении эффективности перекрестка, (ii) движения с разворотом увеличивают диапазон и степень высокой загруженности, и (iii) движения с разворотом на разных направление главной дороги оказывают асимметричное влияние на условия движения перекрестка.
Сравниваются два вида показателей производительности (т. е. поток и средняя задержка управления) для пересечения. Последствия разворотов анализируются при различных начальных условиях. Результаты моделирования показывают, что (i) средняя задержка управления более практична, чем поток, при измерении эффективности перекрестка, (ii) движения с разворотом увеличивают диапазон и степень высокой загруженности, и (iii) движения с разворотом на разных направление главной дороги оказывают асимметричное влияние на условия движения перекрестка.1. Введение
Развороты усложняют городские перекрестки. Однако применяется все шире. Основные причины — запрет левого поворота на перекрестке и отсутствие разделительного просвета на дороге. На рис. 1 показан процесс разворотных движений.
В последнее время влияние разворотов на безопасность и работу перекрестков привлекло большой исследовательский интерес. Эти исследования можно условно разделить на использование аналитических моделей [1–8] и методов имитационного моделирования [9]. –23].
–23].
Некоторые исследователи исследовали пропускную способность регулируемых перекрестков, позволяющую выполнять развороты [1–4]. Соответствующие выводы были использованы в Руководстве по пропускной способности автомобильных дорог (HCM 2010). В нескольких исследованиях [5, 6] были проанализированы характеристики движения с разворотом на нерегулируемых перекрестках с четырех аспектов (т. — полоса поворота). Лю и др. [7] оценили влияние непрямого левого поворота на проезжей части на движение транспорта на регулируемых перекрестках. Гуо и др. [8] разработали отрицательно-биномиальную модель для прогнозирования объема разворота при заходе на посадку с левым поворотом на сигнальном перекрестке в периоды пиковой нагрузки в будние дни.
Аналитические модели адаптируются для анализа одного перекрестка. Однако он не подходит для более сложных случаев, например, двух и более перекрестков. Методы моделирования дорожного движения могут компенсировать недостатки аналитических моделей. Один из подходов к моделированию основан на некоторых коммерческих программах, включая CORSIM, AIMSUN и VISSIM [9–12]. Модели КА применялись также для исследования характеристик транспортных потоков на перекрестках разного типа [13–23]. Типы перекрестков включают кольцевой перекресток, поперечный перекресток и Т-образный перекресток. На Т-образном перекрестке Ли и др. [19] исследовали влияние левоповоротного автомобиля на всю дорожную ситуацию, вводя вероятность приоритета проезжающего автомобиля; Ву и др. [20] проанализировали взаимодействие между транспортными средствами на разных полосах и влияние состояния транспортного потока на разных дорогах на пропускную способность несигнализируемой системы; Ли и др. [21] рассмотрели три входящих потока и два левых поворота для изучения поведения трафика при двух правилах предотвращения столкновений; Дин и др. [22] исследовали и сравнивали фазовую диаграмму, пропускную способность и среднее время прохождения двух различных систем управления сигналами.
Один из подходов к моделированию основан на некоторых коммерческих программах, включая CORSIM, AIMSUN и VISSIM [9–12]. Модели КА применялись также для исследования характеристик транспортных потоков на перекрестках разного типа [13–23]. Типы перекрестков включают кольцевой перекресток, поперечный перекресток и Т-образный перекресток. На Т-образном перекрестке Ли и др. [19] исследовали влияние левоповоротного автомобиля на всю дорожную ситуацию, вводя вероятность приоритета проезжающего автомобиля; Ву и др. [20] проанализировали взаимодействие между транспортными средствами на разных полосах и влияние состояния транспортного потока на разных дорогах на пропускную способность несигнализируемой системы; Ли и др. [21] рассмотрели три входящих потока и два левых поворота для изучения поведения трафика при двух правилах предотвращения столкновений; Дин и др. [22] исследовали и сравнивали фазовую диаграмму, пропускную способность и среднее время прохождения двух различных систем управления сигналами.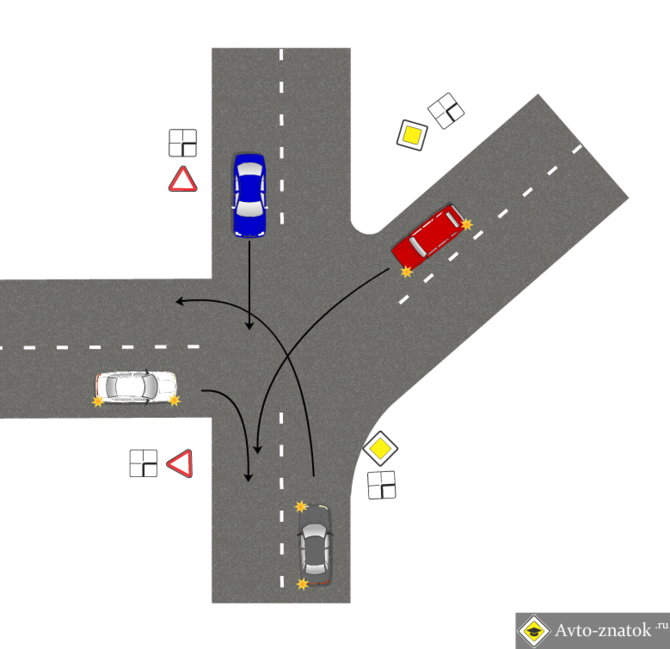 Фан и др. [23] исследовали характеристику транспортного потока на нерегулируемом Т-образном перекрестке со всеми направленными транспортными средствами.
Фан и др. [23] исследовали характеристику транспортного потока на нерегулируемом Т-образном перекрестке со всеми направленными транспортными средствами.
Однако в этих исследованиях производительность перекрестков измерялась не по средней задержке управления, а по потоку для удобства. Это непрактично. Кроме того, не учитывалось влияние разворотов на нерегулируемых перекрестках. По этим причинам и на основе предыдущей работы в [23] в этой статье предлагается новая модель CA для характеристики несигнализированного Т-образного перекрестка с разворотами. Для этого разрабатываются новые правила предотвращения конфликтов и тупиковых ситуаций, а в качестве показателя производительности вводится средняя задержка управления (но не поток). Оставшаяся часть этой статьи организована следующим образом. В разделе 2 модель подробно проиллюстрирована. В разделе 3 анализируются численные и аналитические результаты. Выводы обобщены в разделе 4.9.0003
2. Модель
Геометрическая схема анализируемого Т-образного перекрестка представлена на рис. 2. Она такая же, как и в литературе [19–21]. Каждый из подходов имеет одну полосу движения. Главная улица состоит из полосы A и полосы B. Второстепенная улица состоит из полосы C и полосы D. Транспортные средства движутся по правой полосе. Длина главной улицы , а второстепенной улицы . Пересечение состоит из четырех ячеек: T1, T2, T3 и T4. Существует семь типов транспортных средств: (а) прямолинейные транспортные средства на полосах движения А и В; (b) транспортные средства, поворачивающие налево на полосе A, ; (c) Разворот транспортных средств на полосе A, ; (d) транспортные средства, поворачивающие направо на полосе B, ; (e) Разворот транспортных средств на полосе B, ; (f) транспортные средства, поворачивающие налево на полосу C, ; (g) транспортные средства, поворачивающие направо на полосе C, . Здесь обозначает тип транспортных средств.
2. Она такая же, как и в литературе [19–21]. Каждый из подходов имеет одну полосу движения. Главная улица состоит из полосы A и полосы B. Второстепенная улица состоит из полосы C и полосы D. Транспортные средства движутся по правой полосе. Длина главной улицы , а второстепенной улицы . Пересечение состоит из четырех ячеек: T1, T2, T3 и T4. Существует семь типов транспортных средств: (а) прямолинейные транспортные средства на полосах движения А и В; (b) транспортные средства, поворачивающие налево на полосе A, ; (c) Разворот транспортных средств на полосе A, ; (d) транспортные средства, поворачивающие направо на полосе B, ; (e) Разворот транспортных средств на полосе B, ; (f) транспортные средства, поворачивающие налево на полосу C, ; (g) транспортные средства, поворачивающие направо на полосе C, . Здесь обозначает тип транспортных средств.
2.1. Модель «Правила движения транспортных средств на дороге»
NaSch [24] используется для имитации движения транспортного средства. Хотя просто, он может воспроизводить многие основные явления в реалистичном дорожном движении, такие как волны старт-стоп. В модели NaSch время и пространство дискретны. Дорога разбита на клетки. Каждая ячейка имеет два состояния, занята одним транспортным средством или пуста. Скорость автомобиля может быть ; вот максимальная скорость. Правила обновления модели NaSch следующие: шаг 1: ускорение, ; шаг 2: замедление, ; шаг 3: рандомизация с вероятностью ; шаг 4: обновление позиции, .
Хотя просто, он может воспроизводить многие основные явления в реалистичном дорожном движении, такие как волны старт-стоп. В модели NaSch время и пространство дискретны. Дорога разбита на клетки. Каждая ячейка имеет два состояния, занята одним транспортным средством или пуста. Скорость автомобиля может быть ; вот максимальная скорость. Правила обновления модели NaSch следующие: шаг 1: ускорение, ; шаг 2: замедление, ; шаг 3: рандомизация с вероятностью ; шаг 4: обновление позиции, .
Здесь и обозначают скорость и положение автомобиля соответственно; — количество пустых ячеек перед транспортным средством , — длина транспортного средства ; – вероятность рандомизации.
2.2. Правила предотвращения конфликтов на перекрестке
Из-за того, что ячейка перекрестка может быть занята только одним транспортным средством, при приближении транспортных средств к перекрестку может возникнуть множество потенциальных конфликтов. Классифицируются четыре типа конфликтов. (a) На этапе T1 транспортные средства, движущиеся прямо или поворачивающие налево по полосе A, или транспортные средства, поворачивающие налево по полосе C, могут столкнуться с транспортными средствами, поворачивающими на U по полосе B.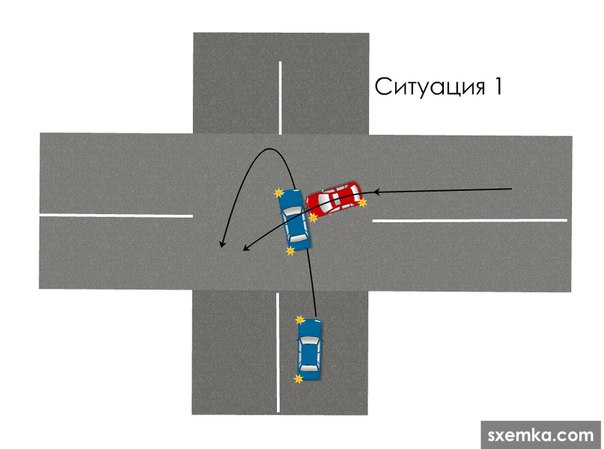 (b) На этапе T1. T2 транспортные средства на полосе A могут столкнуться с левым поворотом на полосе C. (c) В T3 транспортные средства на полосе B могут столкнуться с левым поворотом на полосе A. (d) В T4 транспортные средства с разворотом на полоса A, автомобили с прямым движением на полосе B и автомобили на полосе C могут конфликтовать друг с другом.
(b) На этапе T1. T2 транспортные средства на полосе A могут столкнуться с левым поворотом на полосе C. (c) В T3 транспортные средства на полосе B могут столкнуться с левым поворотом на полосе A. (d) В T4 транспортные средства с разворотом на полоса A, автомобили с прямым движением на полосе B и автомобили на полосе C могут конфликтовать друг с другом.
Во избежание несчастных случаев следует применять некоторые правила контроля при возникновении потенциальных конфликтов. Скорость, положение и тип первого транспортного средства в восходящей ячейке T1 (включая T1) на полосе A обозначаются как , , и , соответственно; те из первого транспортного средства вышестоящей ячейки T4 на полосе B равны , и , и те из первого транспортного средства на полосе C (T4 как ячейка на полосе C) равны , , и . Когда возникает потенциальный конфликт, рассчитывается время, которое необходимо первому транспортному средству, которое движется вверх по перекрестку по каждой полосе, чтобы достичь конфликтной ячейки. Моменты обозначены как , , и , соответственно. Конфликтная ячейка будет занята транспортным средством, которое использует меньше времени, чтобы добраться до конфликтной ячейки. Если времена равны, приоритетная машина займет конфликтную ячейку. Согласно Руководству по пропускной способности автомобильных дорог (HCM 2000), приоритет полосы отчуждения, предоставляемый каждому потоку движения, можно определить следующим образом. Движения 1 ранга включают сквозной транспортный поток по главной улице и правоповоротный транспортный поток с главной улицы. Движения ранга 2 включают левоповоротный транспортный поток с главной улицы и правоповоротный транспортный поток на главную улицу. Движения ранга 3 включают левоповоротный поток с второстепенной улицы. Движения ранга 4 включают разворот транспортного потока с главной улицы.
Моменты обозначены как , , и , соответственно. Конфликтная ячейка будет занята транспортным средством, которое использует меньше времени, чтобы добраться до конфликтной ячейки. Если времена равны, приоритетная машина займет конфликтную ячейку. Согласно Руководству по пропускной способности автомобильных дорог (HCM 2000), приоритет полосы отчуждения, предоставляемый каждому потоку движения, можно определить следующим образом. Движения 1 ранга включают сквозной транспортный поток по главной улице и правоповоротный транспортный поток с главной улицы. Движения ранга 2 включают левоповоротный транспортный поток с главной улицы и правоповоротный транспортный поток на главную улицу. Движения ранга 3 включают левоповоротный поток с второстепенной улицы. Движения ранга 4 включают разворот транспортного потока с главной улицы.
В системе идентифицируются три типа пробок: (a) ячейка T1 занята транспортным средством, поворачивающим налево на полосе A, и ячейка T3 одновременно занята транспортным средством, поворачивающим влево на полосе B; (b) ячейка T2 занята транспортным средством, выполняющим разворот на полосе A, а ячейка T4 одновременно занята транспортным средством, поворачивающим налево на полосе C; (c) ячейка T1 или ячейка T2 занята транспортным средством, поворачивающим налево на полосе A, ячейка T3 занята транспортным средством с прямым движением на полосе B, а ячейка T4 занята транспортным средством, поворачивающим налево. в то же время. Чтобы избежать пробок, используются следующие правила, соответствующие вышеуказанным типам, соответственно: (a) если ячейка T1 или T2 была или будет занята в следующем временном шаге транспортным средством, поворачивающим налево на полосе A, то Разворотному транспортному средству на полосе B не разрешается въезжать в ячейку T3; если ячейка T3 была занята транспортным средством, поворачивающим влево на полосе B, транспортному средству, поворачивающему налево на полосе A, запрещается въезжать в ячейку T1; (b) если ячейка T4 была или будет занята на следующем временном шаге транспортным средством, поворачивающим налево по полосе C, транспортному средству, поворачивающему налево по полосе A, не разрешается въезжать в ячейку T2; если ячейка T2 была занята транспортным средством, поворачивающим влево на полосе A, транспортному средству, поворачивающему налево на полосе C, запрещается въезжать в ячейку T4; (c) если ячейка T1 или T2 была или будет занята на следующем временном шаге транспортным средством, поворачивающим налево на полосе A, транспортному средству, поворачивающему налево на полосе C, не разрешается въезжать в ячейку T4; если ячейка T4 занята транспортным средством, поворачивающим налево на полосе C, транспортному средству, поворачивающему налево на полосе A, запрещается въезжать в ячейки T1 и T2.
в то же время. Чтобы избежать пробок, используются следующие правила, соответствующие вышеуказанным типам, соответственно: (a) если ячейка T1 или T2 была или будет занята в следующем временном шаге транспортным средством, поворачивающим налево на полосе A, то Разворотному транспортному средству на полосе B не разрешается въезжать в ячейку T3; если ячейка T3 была занята транспортным средством, поворачивающим влево на полосе B, транспортному средству, поворачивающему налево на полосе A, запрещается въезжать в ячейку T1; (b) если ячейка T4 была или будет занята на следующем временном шаге транспортным средством, поворачивающим налево по полосе C, транспортному средству, поворачивающему налево по полосе A, не разрешается въезжать в ячейку T2; если ячейка T2 была занята транспортным средством, поворачивающим влево на полосе A, транспортному средству, поворачивающему налево на полосе C, запрещается въезжать в ячейку T4; (c) если ячейка T1 или T2 была или будет занята на следующем временном шаге транспортным средством, поворачивающим налево на полосе A, транспортному средству, поворачивающему налево на полосе C, не разрешается въезжать в ячейку T4; если ячейка T4 занята транспортным средством, поворачивающим налево на полосе C, транспортному средству, поворачивающему налево на полосе A, запрещается въезжать в ячейки T1 и T2.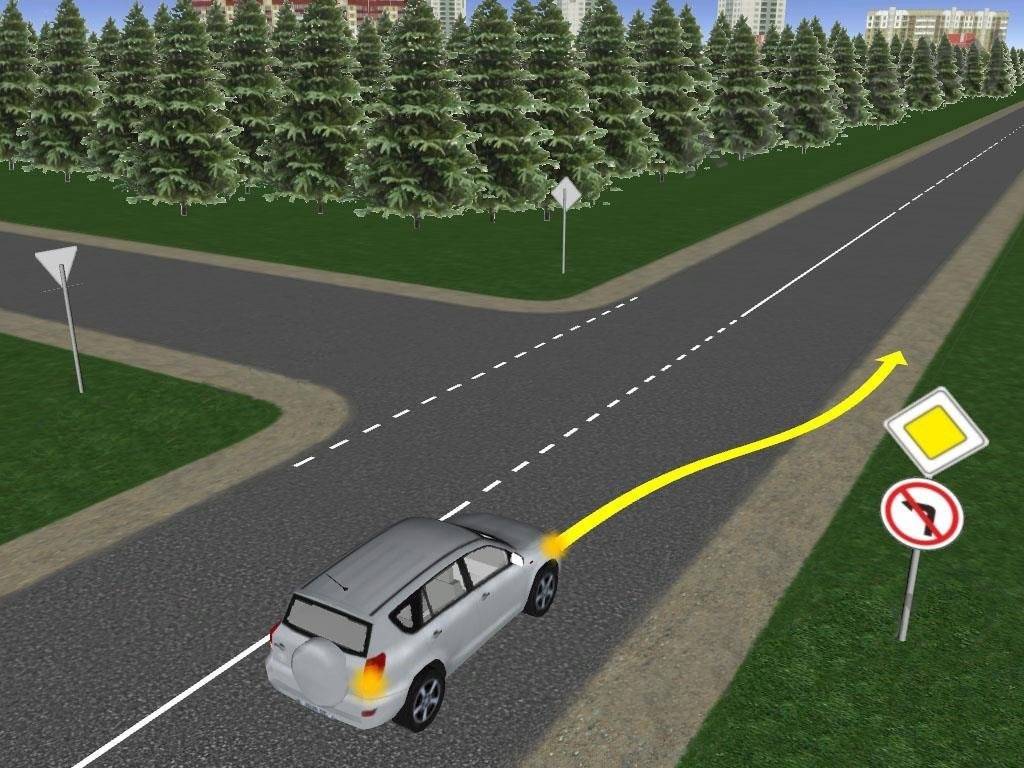
Система работает следующим образом. Во-первых, обновляются скорости всех транспортных средств. Затем выявляются и устраняются конфликты и тупиковые ситуации. Наконец, позиции всех транспортных средств обновлены. Моделирование проводится при открытых граничных условиях. На каждом временном шаге мы проверяем позицию последнего автомобиля на каждой полосе, которая представлена как . Если , новое транспортное средство с максимальной скоростью впрыскивается с расходом в позиции . Здесь, . Транспортное средство на полосе A установлено как транспортное средство, поворачивающее налево с вероятностью и транспортное средство, поворачивающее на разворот с вероятностью . Транспортное средство на полосе B установлено как транспортное средство, поворачивающее направо с вероятностью, и транспортное средство, поворачивающее на разворот, с вероятностью . Транспортное средство на полосе C установлено как транспортное средство, поворачивающее налево с вероятностью . Если положение первого транспортного средства на полосах A, B и D больше, чем длина полосы, транспортное средство будет удалено, а следующее транспортное средство станет новым ведущим транспортным средством.
3. Моделирование и обсуждение
В моделировании , , , , , , , и . Каждая ячейка соответствует 3,75 м; таким образом, длина транспортного средства составляет 7,5 м. Первые 50000 временных шагов отбрасываются, чтобы избежать переходного поведения. Детектор устанавливается в 490-й ячейке на каждой полосе перед перекрестком, чтобы получить поток путем подсчета количества транспортных средств за 20000 временных шагов. Поток дорожек A, B и C обозначен как , , и представляет собой средний поток каждого временного шага. Полный поток Т-образного пересечения есть сумма , , и , что обозначается как . Детекторы времени в пути размещаются относительно далеко вверх и вниз по течению от перекрестка, чтобы лучше фиксировать задержки каждого движения на перекрестке. Данные о задержке извлекаются для временного шага 20000. , и обозначают среднюю задержку управления каждым транспортным средством на полосе A, B, C и перекрестке.
3.1. Характеристики потока и средней задержки управления
Поток и средняя задержка управления могут отражать условия движения на перекрестке. Но производительность у них разная. На рис. 3 показаны (а) поток и (б) средняя управляющая задержка пересечения в пространстве. Имитационная система обладает определенной способностью к самоорганизации. Таким образом, он может подвергаться ограниченным колебаниям скорости притока и оставаться небольшим изменением. Рисунок 3(а) содержит четыре плоских участка и три очень узких и крутых переходных участка. Плоская область означает, что средняя задержка управления сохраняет стабильное значение при изменении скоростей притока. Переходная область означает, что средняя задержка управления резко возрастает с увеличением скорости притока. Если скорости притока превышают критическое значение, средняя задержка регулирования резко возрастает, а затем достигает нового стабильного значения. Это означает, что моделируемая система может быстро переходить из одного состояния равновесия в другое состояние равновесия. Когда скорости притока очень высоки, имитируемая система может оставаться в равновесном состоянии, но появляются небольшие явные колебания.
Но производительность у них разная. На рис. 3 показаны (а) поток и (б) средняя управляющая задержка пересечения в пространстве. Имитационная система обладает определенной способностью к самоорганизации. Таким образом, он может подвергаться ограниченным колебаниям скорости притока и оставаться небольшим изменением. Рисунок 3(а) содержит четыре плоских участка и три очень узких и крутых переходных участка. Плоская область означает, что средняя задержка управления сохраняет стабильное значение при изменении скоростей притока. Переходная область означает, что средняя задержка управления резко возрастает с увеличением скорости притока. Если скорости притока превышают критическое значение, средняя задержка регулирования резко возрастает, а затем достигает нового стабильного значения. Это означает, что моделируемая система может быстро переходить из одного состояния равновесия в другое состояние равновесия. Когда скорости притока очень высоки, имитируемая система может оставаться в равновесном состоянии, но появляются небольшие явные колебания. Искривленная поверхность видна на рисунке 3(b). По изменению цвета можно узнать, что поток неуклонно увеличивается с увеличением скорости притока, а затем становится постоянной величиной. Это означает, что пропускная способность перекрестка имеет максимальное значение при определенных условиях. Оно не могло быть изменено увеличением скорости притока и отражало подвижные состояния равновесия. При сравнении рисунков 3(а) и 3(б) оба они могут отражать эффективность пересечения. Поток может отражать состояние пересечения на макроуровне, такое как свободный поток и заторный поток. Но степень пробки узнать не удалось. Средняя задержка управления может отражать состояние движения автомобиля на перекрестке на микроуровне. По средней задержке управления можно классифицировать свободный поток и степень пробки. Одна плоская область представляет одно конкретное состояние пересечения. А средняя задержка управления может сказать водителю, сколько времени он потратит на проезд перекрестка. Очень полезно для водителя решить, проезжать ли перекресток.
Искривленная поверхность видна на рисунке 3(b). По изменению цвета можно узнать, что поток неуклонно увеличивается с увеличением скорости притока, а затем становится постоянной величиной. Это означает, что пропускная способность перекрестка имеет максимальное значение при определенных условиях. Оно не могло быть изменено увеличением скорости притока и отражало подвижные состояния равновесия. При сравнении рисунков 3(а) и 3(б) оба они могут отражать эффективность пересечения. Поток может отражать состояние пересечения на макроуровне, такое как свободный поток и заторный поток. Но степень пробки узнать не удалось. Средняя задержка управления может отражать состояние движения автомобиля на перекрестке на микроуровне. По средней задержке управления можно классифицировать свободный поток и степень пробки. Одна плоская область представляет одно конкретное состояние пересечения. А средняя задержка управления может сказать водителю, сколько времени он потратит на проезд перекрестка. Очень полезно для водителя решить, проезжать ли перекресток. Отдел управления дорожным движением может решить, будут ли реализованы некоторые меры дорожного движения в соответствии со средней задержкой управления. Таким образом, средняя задержка управления может отражать эффективность пересечения более разумно, чем поток. На рис. 4 показана пространственно-временная диаграмма дорожки А (а), (в), (д) и (е) и дорожки В (б), (г), (е) и (з) с различными скоростями притока. Каждый подграф представляет состояние трафика каждой плоской области на рисунке 3(а). Свободный поток или перегруженный поток каждой полосы можно наблюдать на рисунке 4.
Отдел управления дорожным движением может решить, будут ли реализованы некоторые меры дорожного движения в соответствии со средней задержкой управления. Таким образом, средняя задержка управления может отражать эффективность пересечения более разумно, чем поток. На рис. 4 показана пространственно-временная диаграмма дорожки А (а), (в), (д) и (е) и дорожки В (б), (г), (е) и (з) с различными скоростями притока. Каждый подграф представляет состояние трафика каждой плоской области на рисунке 3(а). Свободный поток или перегруженный поток каждой полосы можно наблюдать на рисунке 4.
3.2. Влияние разворотов
В этой части исследуется влияние разворотов на перекресток. Средняя задержка управления используется для отражения эффективности пересечения.
На рис. 5 показано влияние разворотных движений на эффективность пересечения при различных скоростях притока в случаях (а), (б). По сравнению с рисунками 5(a) и 5(b) условия движения становятся очень чувствительными к разворотным движениям с увеличением скорости притока. Небольшое увеличение числа разворотов приводит к значительному увеличению средней задержки управления. Так вот, ареал этой плоской области при достаточно больших скоростях притока расширяется за счет появления разворотных движений. Это связано с тем, что появление разворотных движений ухудшает условия движения на перекрестке, и возникает больше потенциальных конфликтов с другими транспортными потоками. Транспортные средства должны чаще останавливаться, чтобы избежать столкновений. Так, они тратят больше времени, чтобы пройти перекресток. Это означает, что это вызвало большую задержку управления. Это не очевидно, когда скорости притока малы. Но это очень очевидно, когда скорость притока велика. Следовательно, уменьшение количества разворотов может улучшить условия движения при больших скоростях потока.
Небольшое увеличение числа разворотов приводит к значительному увеличению средней задержки управления. Так вот, ареал этой плоской области при достаточно больших скоростях притока расширяется за счет появления разворотных движений. Это связано с тем, что появление разворотных движений ухудшает условия движения на перекрестке, и возникает больше потенциальных конфликтов с другими транспортными потоками. Транспортные средства должны чаще останавливаться, чтобы избежать столкновений. Так, они тратят больше времени, чтобы пройти перекресток. Это означает, что это вызвало большую задержку управления. Это не очевидно, когда скорости притока малы. Но это очень очевидно, когда скорость притока велика. Следовательно, уменьшение количества разворотов может улучшить условия движения при больших скоростях потока.
Хотя полосы A и полосы B являются основными улицами, влияние разворотов на перекресток различно. На рис. 6 показано влияние движения с разворотом на полосе A и полосе B на эффективность перекрестка в случаях (a), , (b). При сравнении рисунков 6(a) и 6(b) условия движения становятся более чувствительными к разворотам на полосе A, чем на полосе B, с увеличением скорости потока. Когда скорости притока достаточно велики, средняя задержка управления, вызванная движениями с разворотом на полосе A, больше, чем на полосе B. Диапазон этой плоскости с движениями с разворотом на полосе A также больше, чем на полосе B. Причина в том, что транспортные средства, совершающие разворот на полосе А, проезжающие перекресток, могут конфликтовать с транспортными средствами на полосах В и С. Но транспортные средства, разворачивающиеся на полосе В, могут конфликтовать с транспортными средствами на полосе А. Таким образом, полоса A больше конфликтует с другими транспортными потоками, чем полоса B. Это предполагает, что управление разворотными движениями на полосе A может улучшить условия движения при больших скоростях притока.
При сравнении рисунков 6(a) и 6(b) условия движения становятся более чувствительными к разворотам на полосе A, чем на полосе B, с увеличением скорости потока. Когда скорости притока достаточно велики, средняя задержка управления, вызванная движениями с разворотом на полосе A, больше, чем на полосе B. Диапазон этой плоскости с движениями с разворотом на полосе A также больше, чем на полосе B. Причина в том, что транспортные средства, совершающие разворот на полосе А, проезжающие перекресток, могут конфликтовать с транспортными средствами на полосах В и С. Но транспортные средства, разворачивающиеся на полосе В, могут конфликтовать с транспортными средствами на полосе А. Таким образом, полоса A больше конфликтует с другими транспортными потоками, чем полоса B. Это предполагает, что управление разворотными движениями на полосе A может улучшить условия движения при больших скоростях притока.
4. Заключение
В этой статье предлагается новая модель CA для характеристики несигнализируемого Т-образного перекрестка с разворотными движениями. Для этого определяются новые правила предотвращения конфликтов и тупиковых ситуаций, а в качестве меры производительности вводится средняя задержка управления (хотя и не поток). Выполняются симуляции на основе существующей новой модели CA. По результатам моделирования можно сделать три вывода: во-первых, по сравнению с потоком средняя задержка управления более практична для измерения производительности пересечения; во-вторых, при больших скоростях движения развороты могут ухудшить условия движения на перекрестке, то есть увеличить как дальность, так и степень высокой загруженности; наконец, развороты в другом направлении главной дороги оказывают асимметричное влияние на условия движения на перекрестке, например, в данном примере развороты на полосе A оказывают большее влияние, чем на полосе B. Следовательно , чтобы улучшить условия движения на перекрестке, разворотные движения должны быть ограничены, когда скорость въезда достаточно велика.
Для этого определяются новые правила предотвращения конфликтов и тупиковых ситуаций, а в качестве меры производительности вводится средняя задержка управления (хотя и не поток). Выполняются симуляции на основе существующей новой модели CA. По результатам моделирования можно сделать три вывода: во-первых, по сравнению с потоком средняя задержка управления более практична для измерения производительности пересечения; во-вторых, при больших скоростях движения развороты могут ухудшить условия движения на перекрестке, то есть увеличить как дальность, так и степень высокой загруженности; наконец, развороты в другом направлении главной дороги оказывают асимметричное влияние на условия движения на перекрестке, например, в данном примере развороты на полосе A оказывают большее влияние, чем на полосе B. Следовательно , чтобы улучшить условия движения на перекрестке, разворотные движения должны быть ограничены, когда скорость въезда достаточно велика.
Благодарности
Эта работа финансируется Национальной программой фундаментальных исследований Китая (№ 2012CB725400), Национальной программой исследований и разработок в области высоких технологий (2011AA110303), Национальным научным фондом Китая для выдающихся молодых исследователей (71222101), Национальный фонд естественных наук Китая (71071013), Крупные проекты международного сотрудничества (71210001) и Фонды фундаментальных исследований для центральных университетов (2013YJS053).
Ссылки
Дж. К. Адамс и Дж. Э. Хаммер, «Влияние разворотов на скорость насыщения потока при левом повороте», Отчет о транспортных исследованиях , №. 1398, pp. 90–100, 1993.
Посмотреть по адресу: Google ScholarС. М. Цао и С. В. Чу, «Исследование поправочных коэффициентов для разворотов в полосах левого поворота на сигнальных перекрестках», Журнал Advanced Transportation , vol. 29, нет. 2, стр. 183–192, 1995.
Посмотреть по адресу: Google ScholarД. Картер, Дж. Э. Хаммер, Р. С. Фойл и С. Филлипс, «Эксплуатационные и безопасные последствия разворотов на регулируемых перекрестках», Transportation Research Record , №. 1912, стр. 11–18, 2005.
Просмотр по адресу: Google ScholarП. Лю, Дж. Дж. Лу, Дж. Фан, Дж. К. Перниа и Г. Соколов, «Влияние разворотов на емкости сигнальных перекрестков», Протокол транспортных исследований , №. 1920, pp. 74–80, 2005.
Посмотреть по адресу: Google Scholar
П. Лю, X. Ван, Дж. Лу и Г. Соколов, «Характеристики приемлемости полосы движения для U-образных транспортных средств на нерегулируемые перекрестки», Transportation Research Record , no. 2027, стр. 52–57, 2007.
Посмотреть по адресу: Сайт издателя | Google ScholarП. Лю, Т. Пан, Дж. Дж. Лу и Б. Цао, «Оценка пропускной способности разворотов на нерегулируемых перекрестках: конфликтующий объем трафика, эффекты импеданса и пропускная способность полосы для левого поворота», Протокол транспортных исследований , №. 2071, стр. 44–51, 2008 г.
Посмотреть по адресу: Сайт издателя | Google ScholarП. Лю, Дж. Дж. Лу, Х. Чжоу и Г. Соколов, «Эксплуатационные эффекты разворотов как альтернативы прямым левым поворотам», Journal of Transportation Engineering , vol. 133, нет. 5, стр. 327–334, 2007 г.
Посмотреть по адресу: Сайт издателя | Google ScholarТ.
Посмотреть по адресу: Сайт издателя | Google Scholar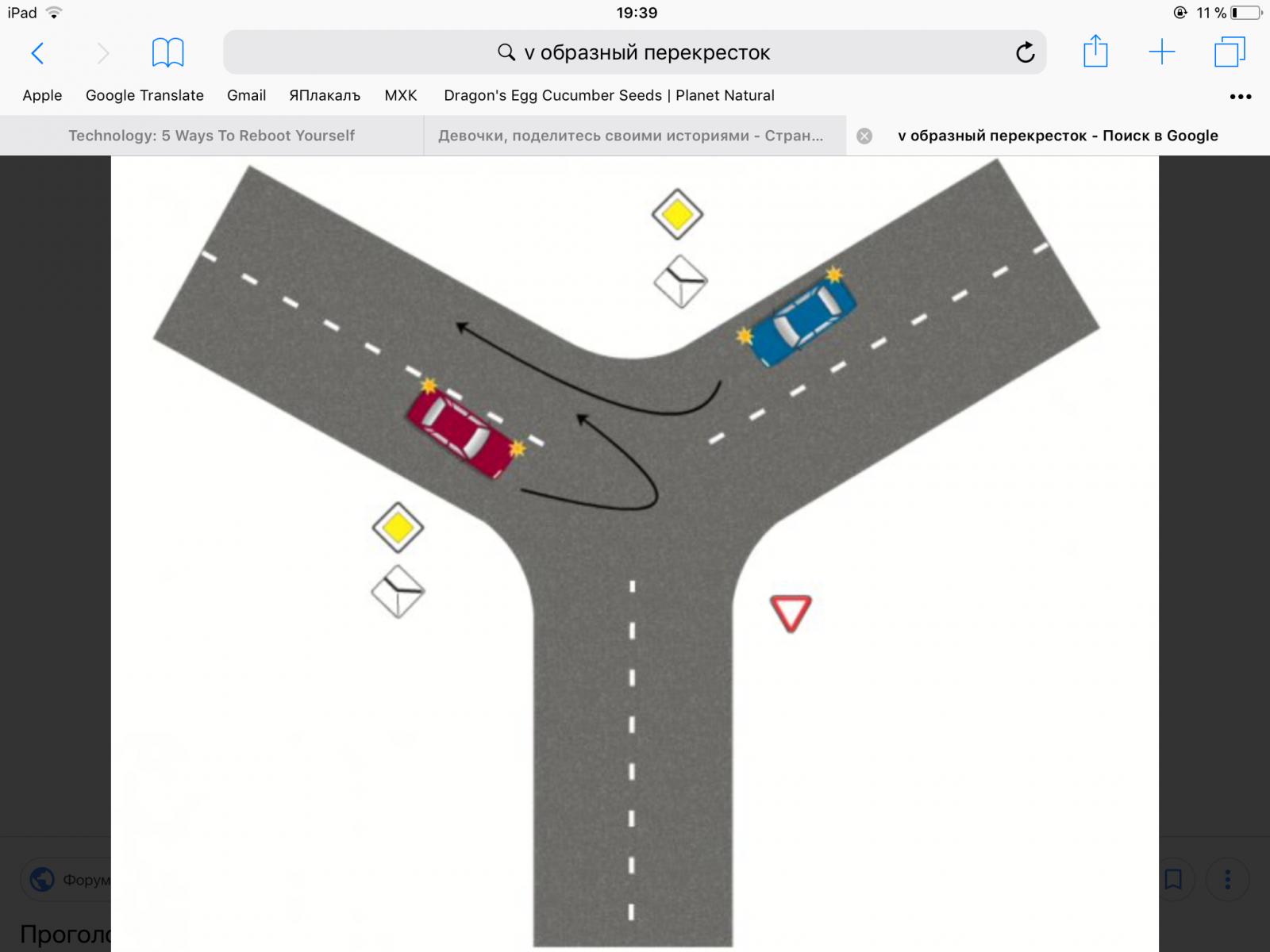 Го, П. Лю, Дж. Дж. Лу, Л. Лу и Б. Цао, «Процедура оценки воздействия непрямых левых поворотов на подъездных путях к движению на регулируемых перекрестках», Журнал транспортного машиностроения , том. 137, нет. 11, стр. 760–766, 2011.
Го, П. Лю, Дж. Дж. Лу, Л. Лу и Б. Цао, «Процедура оценки воздействия непрямых левых поворотов на подъездных путях к движению на регулируемых перекрестках», Журнал транспортного машиностроения , том. 137, нет. 11, стр. 760–766, 2011.X. K. Yang и H. G. Zhou, «Подход к моделированию на основе CORSIM для оценки прямого левого поворота по сравнению с правым поворотом плюс разворот с проезжей части», Journal of Transportation Engineering , vol. 130, нет. 1, стр. 68–75, 2004 г.
Посмотреть по адресу: Сайт издателя | Google ScholarА. Пирдавани, Т. Бриджс, Т. Беллеманс и Г. Ветс, «Оценка времени в пути для объекта с разворотом: сравнение с обычным сигнальным перекрестком», Протокол транспортных исследований , №. 2223, стр. 26–33, 2011 г.
Посмотреть по адресу: Сайт издателя | Google ScholarМ. Эль Эсавей и Т. Сайед, «Анализ эксплуатационных характеристик нетрадиционного срединного дизайна разворотного перекрестка», Canadian Journal of Civil Engineering , vol.
Посмотреть по адресу: Сайт издателя | Google Scholar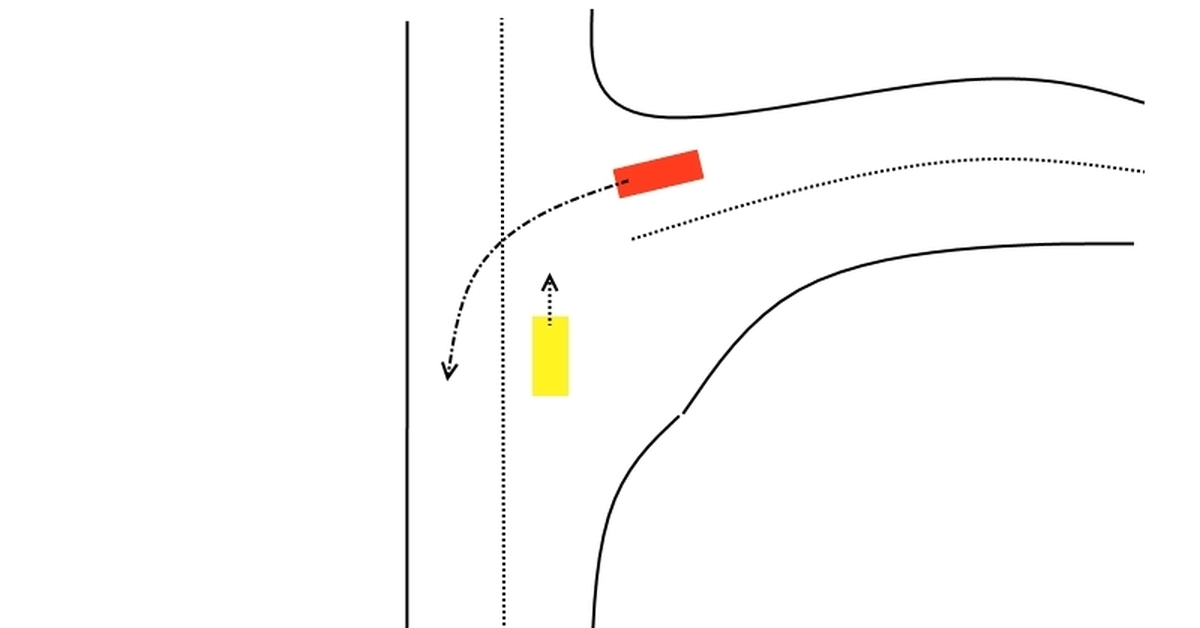 38, нет. 11, стр. 1249–1261, 2011.
38, нет. 11, стр. 1249–1261, 2011.P. Liu, X. Qu, H. Yu, W. Wang и B. Cao, «Разработка имитационной модели VISSIM для разворотов на нерегулируемых перекрестках», Журнал транспортного машиностроения , том. 138, pp. 1333–1339, 2012.
Просмотр по адресу: Google ScholarМ. Э. Фуладванд, З. Саджади и М. Р. Шаебани, «Характеристики транспортного потока на кольцевой развязке », Физический обзор E , том. 70, нет. 4, ID статьи 46132, 8 страниц, 2004 г.
Посмотреть по адресу: Сайт издателя | Google ScholarД. В. Хуанг, «Фазовая диаграмма кольцевого движения», Physica A , том. 383, нет. 2, стр. 603–612, 2007 г.
Посмотреть по адресу: Сайт издателя | Google ScholarМ. Э. Фулаадванд и С. Белбаси, «Транспортный поток на нерегулируемом перекрестке», Journal of Physics A , vol. 40, нет. 29, статья 006, стр.
Посмотреть по адресу: Сайт издателя | Google Scholar 8289–8297, 2007.
8289–8297, 2007.С. Белбаси и М. Э. Фулаадванд, «Моделирование транспортного потока на регулируемом перекрестке», Журнал статистической механики , том. 2008, нет. 7, ID статьи P07021, 2008 г.
Посмотреть по адресу: Сайт издателя | Google ScholarМ. Э. Фулаадванд, М. Фукуи и С. Белбаси, «Фазовая структура одного городского перекрестка: имитационное исследование», Journal of Statistical Mechanics , vol. 2010, нет. 7, ID статьи P07012, 2010.
Посмотреть по адресу: Сайт издателя | Google ScholarЛи К. Л., Ван Б. Х. и Лю М. Р., «Свойства фазовых диаграмм смешанного транспортного потока на перекрестке», 9.0069 Physica A , том. 389, нет. 21, стр. 5045–5052, 2010.
Посмотреть по адресу: Сайт издателя | Google ScholarX. B. Li, R. Jiang, Q. S. Wu, «Модель клеточного автомата, имитирующая транспортный поток на неконтролируемом Т-образном перекрестке», International Journal of Modern Physics B , vol.
Просмотр по адресу: Google Scholar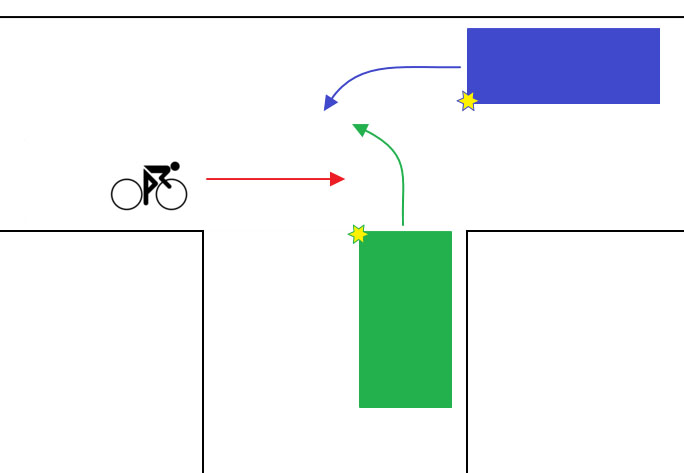 18, нет. 17–19, стр. 2703–2707, 2004.
18, нет. 17–19, стр. 2703–2707, 2004.Q. S. Wu, X. B. Li, M. B. Hu и R. Jiang, «Исследование потока трафика на бессигнализированном T-форме пересечение по модели клеточных автоматов» Европейский физический журнал B , том. 48, нет. 2, стр. 265–269, 2005.
Посмотреть по адресу: Сайт издателя | Google ScholarXG Li, ZY Gao, B. Jia и XM Zhao, «Модель клеточного автомата для несигнализированного T-образного пересечения», International Journal of Modern Physics C , vol. 20, нет. 4, стр. 501–512, 2009 г.
Посмотреть по адресу: Сайт издателя | Google ScholarZ. J. Ding, X. Y. Sun, R. R. Liu, Q. M. Wang и B. H. Wang, «Транспортный поток на регулируемом сигналом Т-образном перекрестке», Международный журнал современной физики C , том. 21, нет. 3, стр. 443–455, 2010.
Посмотреть по адресу: Сайт издателя | Google ScholarH.
Посмотреть по адресу: Google Scholar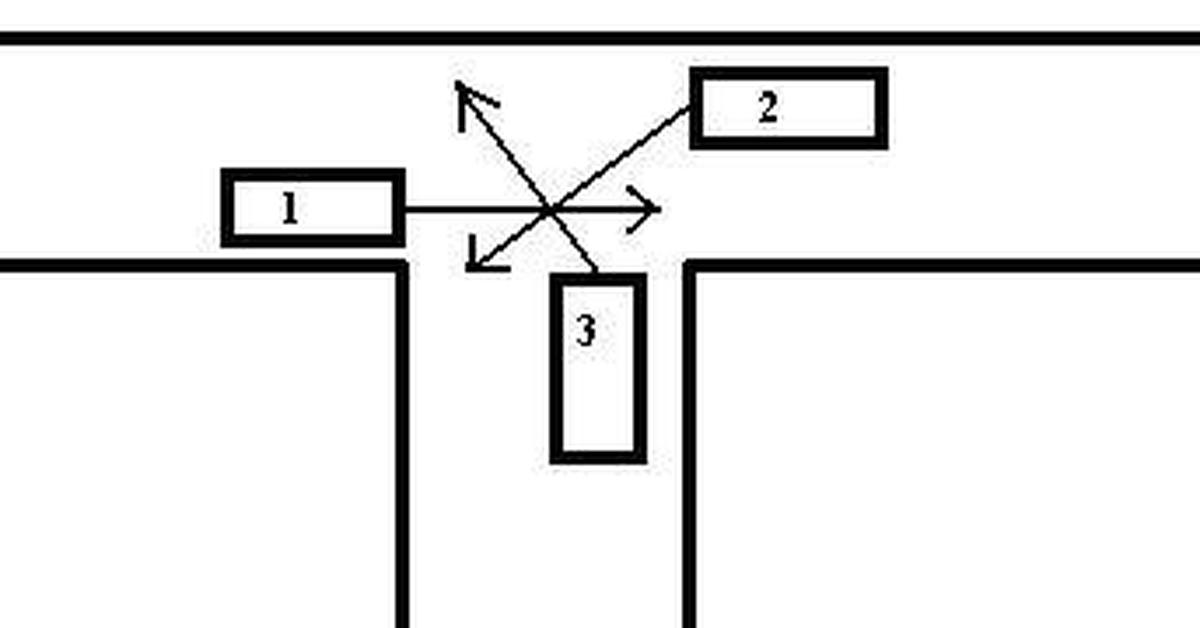 -Q. Фан, Б. Цзя, X.-G. Ли и Ж.-Ф. Тиан, «Характеристики транспортного потока на Т-образном перекрестке без сигнализации», Journal of Transportation Systems Engineering and Information Technology , vol. 12, нет. 1, pp. 185–192, 2012.
-Q. Фан, Б. Цзя, X.-G. Ли и Ж.-Ф. Тиан, «Характеристики транспортного потока на Т-образном перекрестке без сигнализации», Journal of Transportation Systems Engineering and Information Technology , vol. 12, нет. 1, pp. 185–192, 2012.К. Нагель и М. Шрекенберг, «Модель клеточного автомата для движения по автостраде», Journal de Physique , vol. 2, pp. 2221–2229, 1992.
Посмотреть по адресу: Google Scholar
Copyright
Copyright © 2013 Hong-Qiang Fan et al. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Шоссе, чтобы разрастись: как I-35 влияет на то, где люди живут в Остине
Эта история во втором выпуске подкаста «Машина роста». Слушайте полный выпуск через плеер выше и подписывайтесь здесь.
Слушайте полный выпуск через плеер выше и подписывайтесь здесь.
С момента открытия в Остине шесть десятилетий назад I-35 не только перевозила легковые и грузовые автомобили. Шоссе играет важную роль на рынке жилья города.
Открывая новые земли для застройки, I-35 позволила районам расширяться вширь бесконечными волнами. Разрастание города определило ландшафт города и способствовало строительству новых автомагистралей, создавая замкнутую петлю обратной связи, от которой трудно избавиться.
I-35 торжественно открылась 29 марта 1962 года. Люди собрались на эстакаде шоссе в центре Остина. Мужчины в костюмах произносили речи. Играл оркестр средней школы Остина. Вместо того, чтобы перерезать ленточку, через шоссе веером растянулась «девчачья лента», состоящая из учениц местных средних школ.
Департамент транспорта Техаса
Эта так называемая «девчачья лента», сделанная из учениц старших классов, образовала очередь через I-35 на посвящение 29 марта., 1962 год.
Но еще до того, как по новой И-35 скатились первые автомобили, развитие этой, как ее ласково называли, «сверхмагистральной дороги» уже начало сказываться на местах проживания людей.
Чтобы освободить место для шоссе, городской совет Остина конфисковал десятки домов и предприятий, как показывают оценочные отчеты и новостные сообщения. Один из этих домов принадлежал Илусу Холлу.
Натан Бернье
/
Исторический центр Остина
Дом Илуса Холла по адресу 1008 Clermont St.53 Отчет об оценке имущества на пути новой автомагистрали. Отчет был подготовлен оценщиком Беном Э. Кингом для города.Только что из армии, Холл купил свой первый дом на Клермон-стрит, 1008 (ныне Клермон-авеню), всего в нескольких сотнях ярдов к северу от нынешнего озера Леди Бёрд. Он и его жена жили в доме всего за несколько лет до того, как в город постучали. Сначала городские власти хотели лишь часть его собственности для шоссе, и Холл решил, что может остаться.
«Затем они вернулись и сказали: «Нет, этого недостаточно, мы собираемся забрать все», — сказал Холл, которому сейчас 102 года. «Я пытался уговорить их отдать мне заднюю половину. Они бы этого не сделали».
«Я пытался уговорить их отдать мне заднюю половину. Они бы этого не сделали».
Натан Бернье
/
KUT
Дом Илуса Холла, 102, на Клермон-стрит (ныне Клермон-авеню) был захвачен городскими властями Остина в 1950-х годах, чтобы освободить место для I-35.Его дом был оценен в 3400 долларов в 1953 году, что эквивалентно 38 873 долларам в сегодняшних долларах, согласно калькулятору инфляции Бюро трудовой статистики.
«Я бы жил там какое-то время, если бы не продал его», сказал Холл.
Были рассмотрены другие маршруты для шоссе; Остин посмотрел на бульвар Сан-Хасинто и улицу Ред-Ривер. Но Государственный департамент автомобильных дорог был непреклонен в вопросе о прокладке шоссе по Ист-авеню.
«Если вам не нужно шоссе на Ист-авеню, скажите об этом, и мы уйдем и потратим наши деньги в другом месте», — угрожал городской совет Остина в 1946 году государственный дорожный инженер Девитт Грир, согласно Austin Statesman .
Восточная авеню, и без того оживленная улица, имела ширину 60 футов и располагалась недалеко от центра города, что делало ее привлекательным маршрутом.
Но Ист-авеню также была линией разделения. В 1928 году город вынудил чернокожих жителей переехать к востоку от Ист-авеню. Банки использовали этот проспект в качестве границы, чтобы решить, кто может иметь доступ к кредитам — дискриминационная практика, известная как красная черта. Эта политика лишала многих чернокожих жителей Остина права собственности на жилье на десятилетия, не позволяя семьям накапливать богатство для поколений и готовя почву для возможной джентрификации Восточного Остина.
Университет Ричмонда
Часть карты Корпорации займов домовладельцев (HOLC) 1934 года, показывающая отмеченные красными чертами районы в Остине. Восточная авеню образовывала западную границу отмеченной красной линией области в Восточном Остине. Большая часть Восточного Остина была оценена HOLC как «опасная», что ограничивает экономическое развитие этого района, отказывая в ссудах на строительство домов и развитие бизнеса. «[I-35] усугубила сегрегацию для тех людей, которые не могли переехать, или для тех, кто решил не переезжать.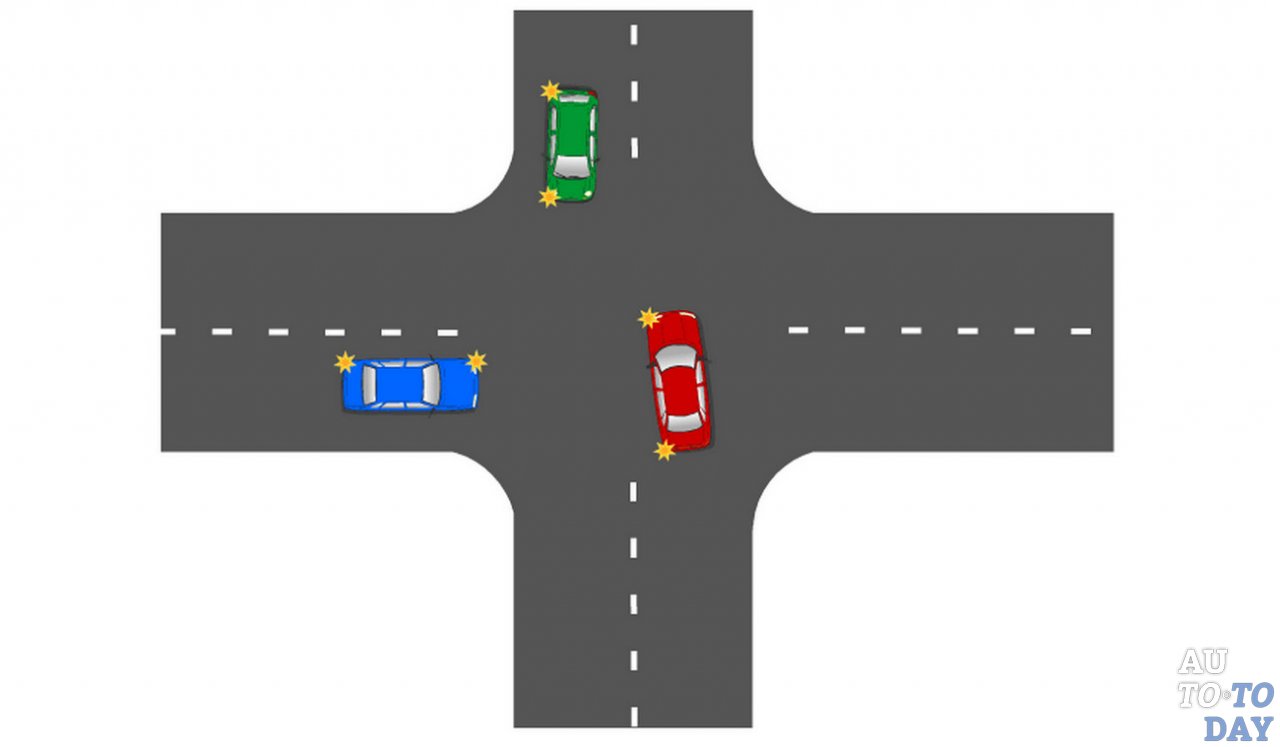 А потом земля здесь обесценилась», — сказал Харрисон Эппрайт, доцент местного туристического бюро Visit Austin and Six Square. , Черный культурный район Остина. Эппрайт родился в 1950-х и вырос в красной черте Восточного Остина.
А потом земля здесь обесценилась», — сказал Харрисон Эппрайт, доцент местного туристического бюро Visit Austin and Six Square. , Черный культурный район Остина. Эппрайт родился в 1950-х и вырос в красной черте Восточного Остина.
«Я думаю, можно сказать, что красная черта была худшей вещью из всех, но, безусловно, вместе с I-35 она стала неофициальным барьером», — сказал он.
Помимо захвата земли для строительства шоссе и закрепления расистской политики сегрегациониста Остина, I-35 сделала еще одну большую вещь: открыла кучу новых земель. Вы можете внезапно ездить намного быстрее по городу и за его пределами. Вы можете купить менее дорогой дом подальше и при этом ездить в город на работу.
«Автомагистрали обеспечивают доступ. Они могут увеличить стоимость земли, к которой они прикасаются», — сказал Джан-Клаудиа Шиара, профессор регионального планирования Техасского университета. «Земля, которая раньше была недоступна, теперь доступна».
К 1972 году, через десять лет после открытия автомагистрали I-35 в Остине, город значительно вырос, присоединив почти 40 квадратных миль земли и увеличив свой географический размер почти на 60%.
Чак Фухс в Parsons Brinkerhof
/
Texas Freeway
Вид на I-35 на 15-й улице в 1972 году, до надстройки верхних палуб.По мере того, как Остин рос, он становился менее плотным, жители рассредоточились и жили дальше друг от друга. Это ознаменовало начало новой эпохи роста: эпохи разрастания на стероидах.
«Мы как бы понимаем [разрастание], когда видим его», — сказала Скиара. «Малоэтажная коммерческая застройка, торговые центры, меньше возможностей для трудоустройства, больше вождения. Иногда это имеет негативный эстетический оттенок».
Автомагистраль I-35 также служила политическим выпускным клапаном, снимая давление с Центрального Остина, чтобы застроить его более плотно и освободить место для людей.
«Все это время население говорит: «Пусть идут в Раунд-Рок. Мы не хотим, чтобы они были соседями», — сказал Синклер Блэк, архитектор на пенсии, который 50 лет преподавал в UT Austin и долгое время выступал против расширения шоссе в Остине. — Значит, это какой-то взаимный заговор. Ты выгонишь их из города, а мы построим им дорогу.
— Значит, это какой-то взаимный заговор. Ты выгонишь их из города, а мы построим им дорогу.
В последние годы новые автомагистрали стимулировали рост пригородов. С момента открытия государственной автомагистрали 130 в 2006 году население Хатто увеличилось в четыре раза и составило примерно 40 000 человек. SH 130 проходит через Хатто.
Несмотря на то, что дома в быстрорастущих пригородах Остина более доступны по цене, проживание вдали от города часто сопряжено с дополнительными расходами. Резкие колебания цен на газ могут оказать большое влияние на ваш домашний бюджет. Вы можете купить машину побольше, чтобы чувствовать себя в большей безопасности среди 18-колесников на И-35. Или, чтобы сэкономить на бензине, вы можете инвестировать в более дорогой электромобиль.
Езда на автомобиле повсюду также оказывает воздействие на окружающую среду; это главный фактор изменения климата. А загрязнение от выбросов двигателей ухудшает качество воздуха, что плохо для людей, которые борются с респираторными заболеваниями, такими как астма.![]()
Но есть еще одна скрытая плата за проживание в пригороде, и она может колебаться так же сильно, как цена на бензин: время, которое вы проводите в пробке.
«В среднем я теряю около двух часов в день, около двух часов в день на дорогу на работу и обратно и, возможно, на выполнение поручений», — сказал Хантер Холдер, технический работник, который в прошлом году переехал с мужем из района Далласа в Джорджтаун. , пригород к северу от Остина.
Они потратили недели на поиски дома, который они могли себе позволить, с местом для офиса, задним двором для собаки и близостью к продуктовым магазинам.
Патрисия Лим
/
Охотник Холдер и его муж хотели дом с задним двором для их собаки. Они купили дом в Джорджтауне в 2022 году недалеко от пика рынка. «Мне это нравится. Это совершенно здорово. Но да, дорога на работу просто чудовищна», — сказал Холдер. Он хотел бы жить поближе к друзьям в Остине, но «место, в котором мы могли бы комфортно жить, стоило бы более миллиона долларов, а несколько лет назад это было не так»..jpg)