
Принцип работы роботизированной коробки передач
Все давно привыкли к автоматизированным коробкам переключения передач на автомобилях, ведь их аналоги ставились еще на Ford T, но многих до сих пор пугает словосочетание «роботизированная коробка». Попробуем разобраться в ее устройстве.
Автор: Никита Новиков, редактор
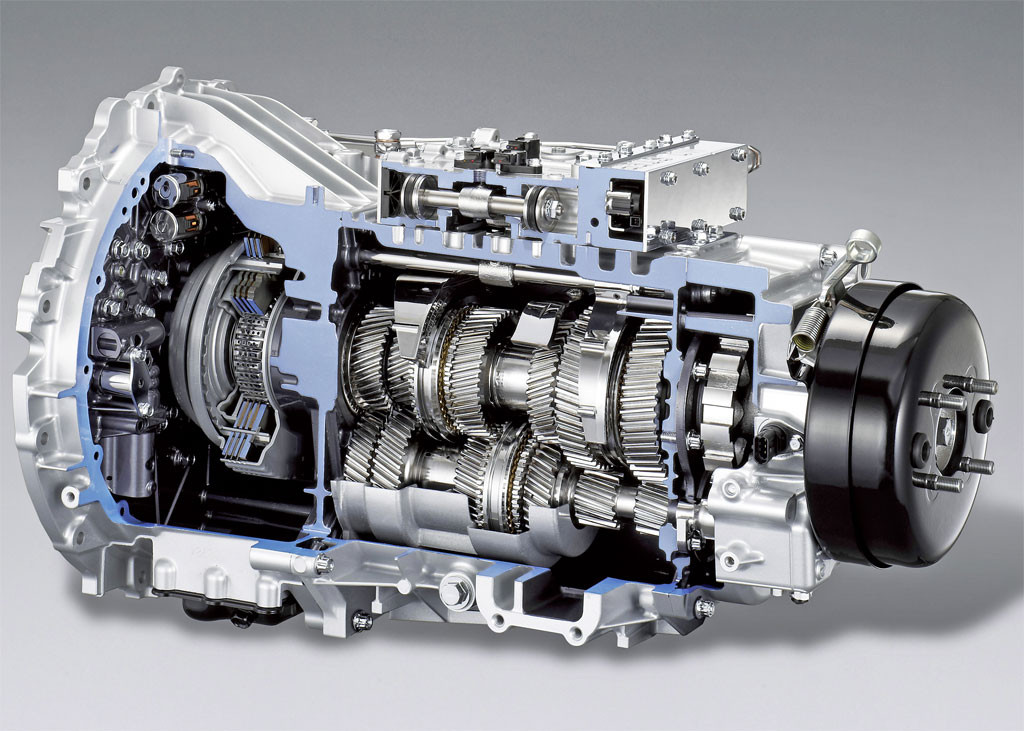
Для знакомства с роботизированной КПП необходимо вспомнить основы устройства обычной механической коробки передач. Главной составляющей МКПП являются 2 вала — первичный, на который и передается крутящий момент силовой установки, и вторичный, с которого преобразованный момент перераспределяется на колеса. На оба вала насажены шестерни, попарно находящиеся в зацеплении. Шестерни первичного вала закреплены на нем жестко, а на вторичном они свободно вращаются. В нейтральном положении ручки КПП все вторичные шестерни прокручиваются на валу свободно и крутящий момент на ведущую ось не поступает.
Принцип действия роботизированных коробок передач совпадает с принципом работы «механики». Только действия по смыканию/размыканию сцепления и выборому передач в данном типе коробок выполняют актуаторы. В большинстве случаев это шаговый электромотор с редуктором и исполнительным механизмом. Управляет актуаторами электронный блок.
В автоматическом режиме команда на переключение передачи поступает от бортового компьютера, учитывающего скорость движения, обороты двигателя, данные ESP, ABS и других вспомогательных систем. А в ручном — от водитель при переключении селектора КПП или лепестков, расположеных под рулем.
Основная проблема роботизированных КПП — отсутствие обратной связи по сцеплению. Человек чувствует диски смыкаются и может контролировать скорость и плавность переключения. А электроника вынуждена перестраховываться: чтобы избежать рывков и сохранить сцепление, «робот» надолго разрывает поток мощности от двигателя к колесам во время переключения.
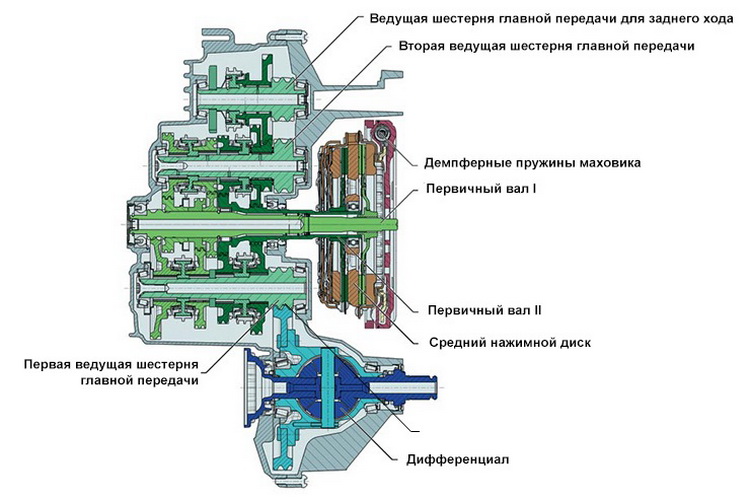
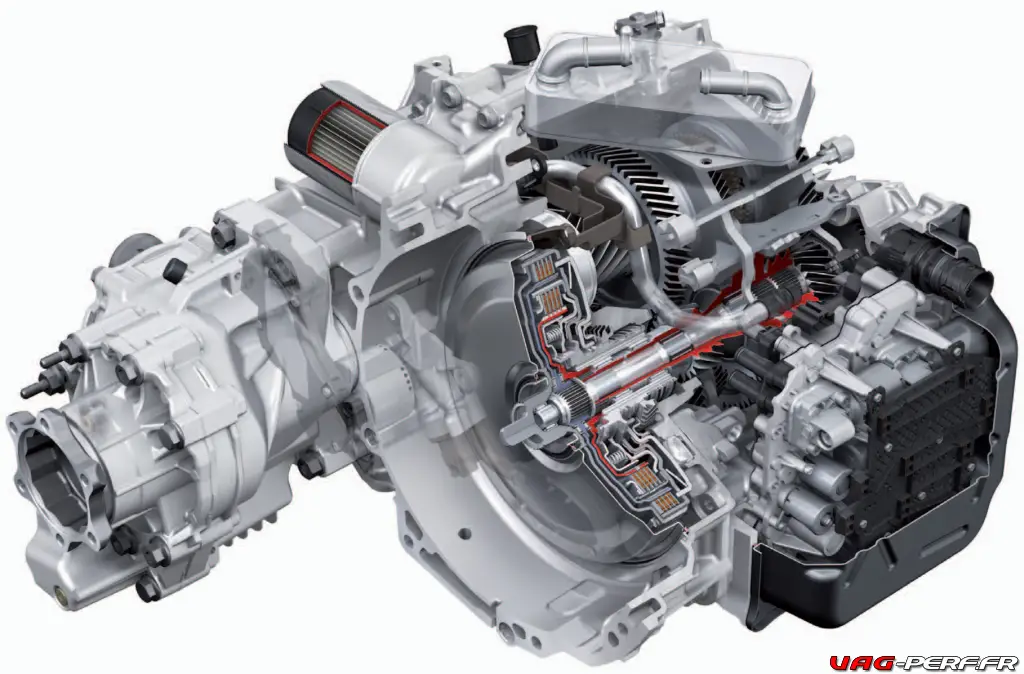
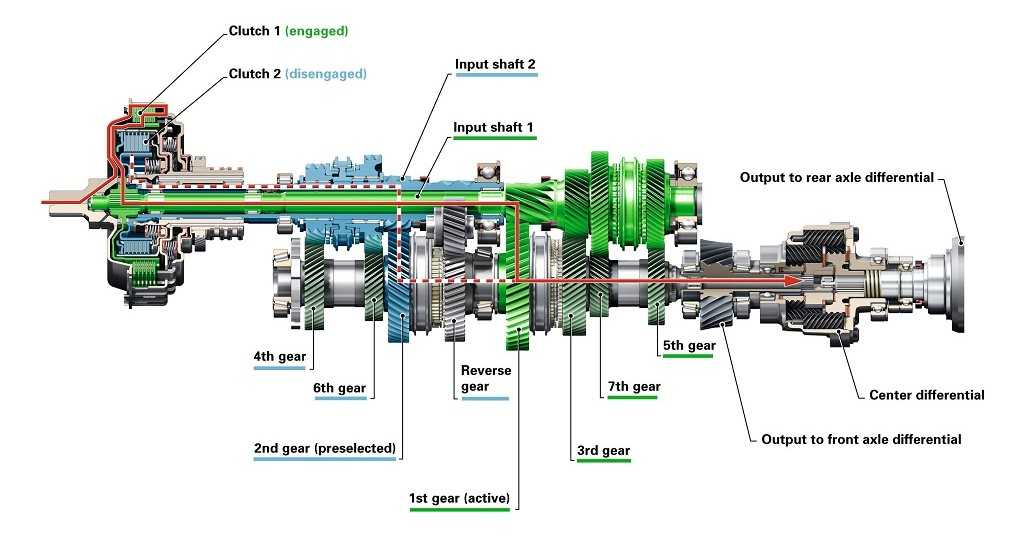
Инновацией в автомобилестроение стала появившаяся в начале 1980 годов трансмиссия с 2 сцеплениями DCT — dual clutch transmission. К их числу можно отнести 6-ступенчатую коробку DSG концерна Volkswagen. У немецкого варианта 2 вторичных вала с расположенными на них ведомыми шестернями и синхронизаторами — как у 6-ступенчатой МКПП, устанавливаемой на Golf. Фокус в том, что первичных валов тоже два и они вставлены додин в другой по принципу матрешки и соединены с двигателем через отдельное многодисковое сцепление. На внешнем первичном валу закреплены шестерни 2, 4 и 6 передач, на внутреннем — 1, 3, 5 и заднего хода. Электроника автоматически готовит следующую передачу и при необходимости моментально ее включает, одновременно с этим подготавливая следующую передачу на другом валу.
Смена передач происходит с минимальным по времени разрывом потока мощности и с невероятной скоростью. Серийная коробка Volkswagen Golf переключается за 8 мс, а для сравнения, на Ferrari Enzo — 150 мс!
Коробки с двойным сцеплением расходуют меньше топлива и быстрее меняют скорости по сравнению с традиционными механическими, при этом более комфортны, чем АКПП. К основным недостаткам можно отнести высокую цену. Другая проблема — неспособность передавать большой крутящий момент — решили с появлением DSG фирмы Ricardo на 1000-сильном купе Bugatti Veyron. Но пока на большинство суперкаров устанавливаются «роботы».
Сегодня коробки DCT разработаны компаниями BMW, Ford, Mitsubishi и FIAT. Данный тип признали даже конструкторы Porsche, которые применяют в своих моделях исключительно проверенные технологии. Эксперты считают, что в скором времени самыми распространенными трансмиссиями будут «роботы» DCT и вариаторы.
Роботизированная коробка переключения передач.

- Подробности
- Категория: Трансмиссия
- Опубликовано: 23 декабря 2014
Роботизированная коробка передач – это одна из разновидностей механической коробки передач, отличие которой состоит в том, что за включение и выключение сцепления отвечают специальные автоматизированные устройства.
В настоящее время данный вид коробки передач достаточно популярен, и по распространению может поспорить с автоматической коробкой передач.
Основные компоненты и принцип действия роботизированной коробки передач.
Для того, чтобы лучше понять принцип работы роботизированной коробки передач необходимо знать, как работает классическая механика. В обычной механической коробке передач, основу составляют два вала: первичный и вторичный. На один из валов передается усилие от двигателя, со второго вала усилие передается на ведущие колеса. Между собой валы сообщаются шестернями, но на первичном валу шестерни закреплены намертво, а на вторичном валу шестерни могут прокручиваться.
Первоначально автомобилист выжимает сцепление (первичный вал отключается от двигателя), включает необходимую передачу (на вторичном валу блокируется нужна шестерня). В дальнейшем водитель отпускает сцепление, первичный вал подхватывает крутящий момент с двигателя, и передает его на вторичный вал, и автомобиль трогается с места.
Аналогичным образом работает и роботизированная коробка передач. Главное отличие состоит в том, что за включение сцепления, и выбор передачи отвечают специальные автоматизированные устройства – актуаторы.
Когда водитель переключает рукоять коробки передач (или нажимает на подруливай лепесток), привод автоматически выжимает сцепление, и выбирает передачу в зависимости от оборот двигателя. Именно благодаря этому в автомобилях с роботизированной коробкой передач отсутствует педаль сцепления – она попросту не нужна.
Надо сказать, что в современных автомобилях электронный блок управления роботизированной коробкой передач подключен к информационной сети автомобиля. Он получает и анализирует информацию от антиблокировочной системы, системы курсовой устойчивости и других вспомогательных устройств, и принимает решение о включении необходимой скорости на этих данных.
Впрочем, существует возможность переключится на псевдоручное управление, и переключать передачи с помощью рычага или под рулевых лепестков. Однако, подобное переключение достаточно условно, и электронный блок контролирует все действия водителя. Он попросту не позволит включить неправильную скорость, и исправить ошибку водителя, если он вручную включит слишком высокую или слишком низкую передачу.
Виды роботизированных коробок передач.
Классифицировать данный вид коробок передач достаточно сложно, ведь каждая крупная автомобильная компания предлагает свои собственные наработки, которые сильно отличаются от классической схемы.
Итак, как уже было сказано выше, коробка-робот может работать с помощью электрического или гидравлического мотора.
В частности, гидравлическим приводом оснащаются свои роботизированные коробки такие компании, как Fiat, BMW, Peugeot, Volkswagen, Renault, Citroen, Audi, Alfa Romeo и Ламборгини. В свою очередь электрическим приводом оснащают свои роботизированные коробки такие крупные производители, как Toyota, Opel, Mitsubishi, Ford и Nissan. Корейские и китайские производители автомобилей пока обходят стороной данный вид коробок передач, так как он достаточно сложен в разработке и дальнейшем обслуживании.
Корейские и китайские производители автомобилей пока обходят стороной данный вид коробок передач, так как он достаточно сложен в разработке и дальнейшем обслуживании.
Нельзя не сказать о роботизированных коробке передач с двумя сцеплениями. Эта технология появилась в конце 80-х годов прошлого века, и прошла серьезное испытание в автомобильном спорте и раллийных гонках. Два сцепления работают не одновременно, а попеременно. Первое сцепление включает четные передачи, а второе – нечетное. Благодаря подобной работе двух сцеплений, езда на автомобиле получается очень плавной и мягкой, однако в конструктивном плане такой агрегат достаточно сложен. Его ремонт и обслуживание может обойтись в приличную сумму денег.
Особый интерес представляет собой кулачковая роботизированная коробка передач. В автомобилях оснащенных такой коробкой имеется педаль сцепления, но используется она лишь, когда автомобиль трогается с места. В дальнейшем переключаться можно как в спортивном мотоцикле – не пользуясь педалью сцепления. Это самая быстрая из всех видов роботизированных коробок, так как можно переключить скорость всего лишь за 0,15 секунды, а это отличный показатель для любителей быстрой езды.
Это самая быстрая из всех видов роботизированных коробок, так как можно переключить скорость всего лишь за 0,15 секунды, а это отличный показатель для любителей быстрой езды.
Отличия коробки-робота от коробок передач других видов.
- Отличия от автоматической коробки передач. Главное отличие в том, что автоматическая коробка передач включает в себя сложнейшую планетарную передачу, которая не только увеличивает стоимость агрегата, но и повышает его массу. Коробка-автомат работает полностью самостоятельно и не дает водителю возможности переключать скорости в ручном режиме.
- Отличия от вариатора. Как известно коробка-вариатор вообще не имеет передач. В конструктивном плане данная коробка полностью отличается от коробки-робота. Также можно отметить, что вариатор, из-за своей гидромуфты, имеет достаточно низкий коэффициент полезного действия, и «отъедает» до 10% от общей мощности автомобиля. Естественно, это повышает расход топлива при движении.
- Отличия от ручной коробки передач.
 Собственно, главное отличие состоит в том, что коробка-робот имеет в своем составе актуаторы, которые включают сцепления, и управляются с помощью электронного блока. Роботизированная коробка передач намного облегчает управление автомобилем, по сравнению с ручной коробкой, но при этом не исключены рывки и задержки при переключении скоростей.
Собственно, главное отличие состоит в том, что коробка-робот имеет в своем составе актуаторы, которые включают сцепления, и управляются с помощью электронного блока. Роботизированная коробка передач намного облегчает управление автомобилем, по сравнению с ручной коробкой, но при этом не исключены рывки и задержки при переключении скоростей.
Преимущества и недостатки роботизированных коробок передач. К достоинствам таких коробок можно отнести:
- Не снижает мощности двигателя и не увеличивает расход топлива. Коробка-робот имеет достаточно простую конструкцию, не обремененную дополнительными агрегатами и хитроумными устройствами. Благодаря этому коэффициент полезного действия робота высок, он не отнимает мощности двигателя и тем самым не увеличивает расход топлива.
- Потребляет меньшее количество масла. Не для кого не секрет, что классическая автоматическая коробка передач потребляет до 10 литров масла на расходный цикл. В свою очередь коробка-робот обходится всего лишь 2-3 литрами, что очень выгодно и удобно.

- Высокий ресурс сцепления. Сцепление в механической коробке передач имеет весьма ограниченный жизненный цикл. Менять его нужно достаточно часто. Зато сцепление в роботизированной коробке живет очень долго, так как электронный блок не ошибается при переключении и не дает сцеплению «гореть».
- Высокая ремонтопригодность. Как уже было сказано выше коробка-робот имеет простую конструкцию, которую хорошо изучили во всех сервисных центрах страны. Ремонт такой коробки не займет много времени, и не обойдется в умопомрачительную сумму.
- Возможность ручного переключения. Коробка-робот – сочетает в себе комфортность автомата и приемистость ручной коробке. При необходимости езда будет комфортной, а при желании – агрессивной.
К недостаткам можно отнести:
- Большинство роботов не программируется. Автомобиль не будет подстраивается под стиль езды водителя. Придется ездить всегда в одном и том же режиме, либо переходить на ручное переключение скоростей.
 Лишь самые новые и дорогие роботы имеют возможность программирования, но их цена пока зашкаливает.
Лишь самые новые и дорогие роботы имеют возможность программирования, но их цена пока зашкаливает. - Не быстрая работа. Робот не может похвастаться быстрым и отточенным переключением скоростей. Дешевые роботизированные коробки передач могут переключать скорость 2-3 секунды и это непозволительно долго. Положение исправляют агрегаты с двумя сцеплениями, но они доступны не для всех автомобилей.
- Сбои в прошивке. Ошибки в переключении скоростей – не редкость для роботизированных коробок передач. Рывки или включение неправильной скорости достаточно распространенные явления. В этом случае проблема заключается в электронном блоке, который либо прошивается заново, либо меняется целиком.
За последние два десятилетия технологии значительно продвинулись вперед, коробки-роботы стали надежны и распространены. Они пользуются заслуженной популярностью по всему миру, и люди уже не опасаются приобретать машины с подобной коробкой передач.
Магнитная коробка передач может заставить роботов ползать или прыгать внутри вашего тела
Роботы без батарей, моторов или электроники могут испытывать недостаток в энергии, но крошечная коробка передач, приводимая в действие внешним магнитным полем, позволила одному мягкому роботу прыгать почти в 40 раз больше своего роста
Технологии 31 августа 2022 г.Мэтью Спаркс
Крошечная коробка передач, работающая от внешнего магнитного поля, позволила одному мягкому роботу прыгать почти в 40 раз больше своего роста как гусеница или прыгать почти в 40 раз больше собственного роста, несмотря на то, что на борту нет аккумуляторов или моторов. Эта технология может привести к созданию медицинских роботов, которые смогут путешествовать по человеческому телу, брать образцы или доставлять лекарства.
Мягкие роботы, которые не имеют батарей, двигателей или электроники и питаются и управляются дистанционно с помощью света или магнитов, являются популярной областью исследований, поскольку их простота позволяет сделать их очень миниатюрными. Но им может не хватать мощности, когда задача требует прокалывания кожи или вскрытия спавшихся полостей.
Теперь Чонг Хонг из Института интеллектуальных систем Макса Планка в Германии и его коллеги создали редуктор диаметром около 3 миллиметров, оснащенный шестернями диаметром всего 270 микрометров.
Объявление
Шестерни отлиты из эпоксидной смолы, пропитанной алюминием. Магнит, прикрепленный к входному валу, приводится в действие внешним вращающимся магнитным полем, которое усиливает крутящий момент или силу вращения до 342 раз.
Подробнее: Робот, сделанный из липкой ленты и металлического порошка, может ползать по вашим органам
Эти редукторы, содержащие семь передач для усиления входного сигнала, могут быть установлены на различных модульных роботах для выполнения ряда задач: один ползает как гусеница со скоростью 0,68 миллиметра в секунду, другая накапливает энергию в упругих ногах и прыгает 119миллиметров, в то время как другие цепляются за твердые предметы, которые протыкают иглой.
Во время испытаний похожий на лебедку робот, оснащенный коробкой передач, смог поднять 103 грамма.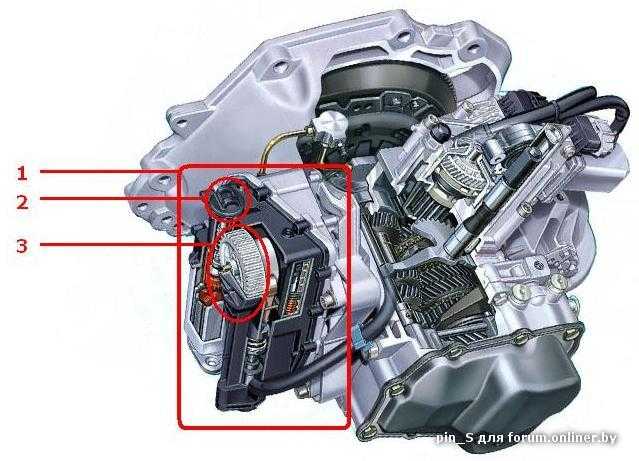
Хонг говорит, что технология может позволить создавать более мощных и сложных мягких роботов, хотя для их ядра потребуется прочная коробка передач.
«В будущем мы можем использовать робота в ограниченном пространстве, например, в человеческом теле, или в зернистой среде [например, в песке], как [как] дождевой червь [движется]», — говорит он.
«По сравнению с другими магнитными роботами, нашему просто требуется очень слабое магнитное поле, поэтому мы можем разместить нашу систему управления далеко от робота, потому что редуктор усиливает магнитную силу для работы. Так что, возможно, этот робот сможет получить большее рабочее расстояние [чем существующие мягкие роботы]».
Ссылка на журнал: Science Robotics , DOI: 10.1126/scirobotics.abo4401
Дополнительные сведения по этим темам:
- робот
- механизм
|
 Редуктор крепится к валу двигателя и благодаря внутренней конфигурации сопряженных шестерен в корпусе обеспечивает повышенный выходной крутящий момент и пониженную выходную скорость.
Редуктор крепится к валу двигателя и благодаря внутренней конфигурации сопряженных шестерен в корпусе обеспечивает повышенный выходной крутящий момент и пониженную выходную скорость. В отличие от других типов редукторов, цилиндрические редукторы также могут быть изготовлены из пластика, такого как поликарбонат или нейлон. Помимо используемого сырья, ориентация зубьев шестерни играет важную роль в общей эффективности, крутящем моменте и скорости системы. Редукторы с прямыми коническими зубьями обычно используются на низких скоростях, поскольку они могут быть шумными и иметь более низкую общую эффективность. Цилиндрические и спирально-конические редукторы обычно используются в высокоскоростных приложениях, поскольку они работают тише и с большей общей эффективностью, чем редукторы с прямыми зубьями.
В отличие от других типов редукторов, цилиндрические редукторы также могут быть изготовлены из пластика, такого как поликарбонат или нейлон. Помимо используемого сырья, ориентация зубьев шестерни играет важную роль в общей эффективности, крутящем моменте и скорости системы. Редукторы с прямыми коническими зубьями обычно используются на низких скоростях, поскольку они могут быть шумными и иметь более низкую общую эффективность. Цилиндрические и спирально-конические редукторы обычно используются в высокоскоростных приложениях, поскольку они работают тише и с большей общей эффективностью, чем редукторы с прямыми зубьями.
 Например, в одной из возможных конфигураций солнечная шестерня используется в качестве входа, кольцевое пространство — в качестве выхода, при этом водило планетарной передачи остается неподвижным. В этой конфигурации входной вал вращает солнечную шестерню, планетарные шестерни вращаются вокруг своих осей, одновременно прикладывая крутящий момент к вращающемуся водилу планетарной передачи, которое, в свою очередь, передает крутящий момент на выходной вал (в данном случае на кольцо).
Например, в одной из возможных конфигураций солнечная шестерня используется в качестве входа, кольцевое пространство — в качестве выхода, при этом водило планетарной передачи остается неподвижным. В этой конфигурации входной вал вращает солнечную шестерню, планетарные шестерни вращаются вокруг своих осей, одновременно прикладывая крутящий момент к вращающемуся водилу планетарной передачи, которое, в свою очередь, передает крутящий момент на выходной вал (в данном случае на кольцо). Скорость вращения редуктора полностью зависит от вращения вала двигателя, к которому он прикреплен. Кроме того, скорость и направление двигателя контролируются водителем. В результате, когда на привод подается питание, вал двигателя вращается внутри редуктора, заставляя вращаться выходной вал редуктора. Конечная выходная скорость и крутящий момент зависят от внутренней конфигурации редуктора.
Скорость вращения редуктора полностью зависит от вращения вала двигателя, к которому он прикреплен. Кроме того, скорость и направление двигателя контролируются водителем. В результате, когда на привод подается питание, вал двигателя вращается внутри редуктора, заставляя вращаться выходной вал редуктора. Конечная выходная скорость и крутящий момент зависят от внутренней конфигурации редуктора.


 Одним из основных отличий между отдельными коробками передач являются их рабочие характеристики. Выбор из различных типов редукторов зависит от области применения. Редукторы доступны во многих размерах, передаточных числах, эффективности и характеристиках люфта. Все эти конструктивные факторы будут влиять на производительность и стоимость редуктора. Редуктор бывает нескольких видов:
Одним из основных отличий между отдельными коробками передач являются их рабочие характеристики. Выбор из различных типов редукторов зависит от области применения. Редукторы доступны во многих размерах, передаточных числах, эффективности и характеристиках люфта. Все эти конструктивные факторы будут влиять на производительность и стоимость редуктора. Редуктор бывает нескольких видов: Конические редукторы в основном используются в прямоугольных передачах с перпендикулярным расположением валов.
Конические редукторы в основном используются в прямоугольных передачах с перпендикулярным расположением валов. Уровень шума цилиндрических шестерен относительно высок из-за столкновения зубьев шестерен, что делает зубья цилиндрических шестерен склонными к износу. Цилиндрические зубчатые колеса бывают разных размеров и передаточных чисел, чтобы соответствовать приложениям, требующим определенной скорости или выходного крутящего момента.
Уровень шума цилиндрических шестерен относительно высок из-за столкновения зубьев шестерен, что делает зубья цилиндрических шестерен склонными к износу. Цилиндрические зубчатые колеса бывают разных размеров и передаточных чисел, чтобы соответствовать приложениям, требующим определенной скорости или выходного крутящего момента.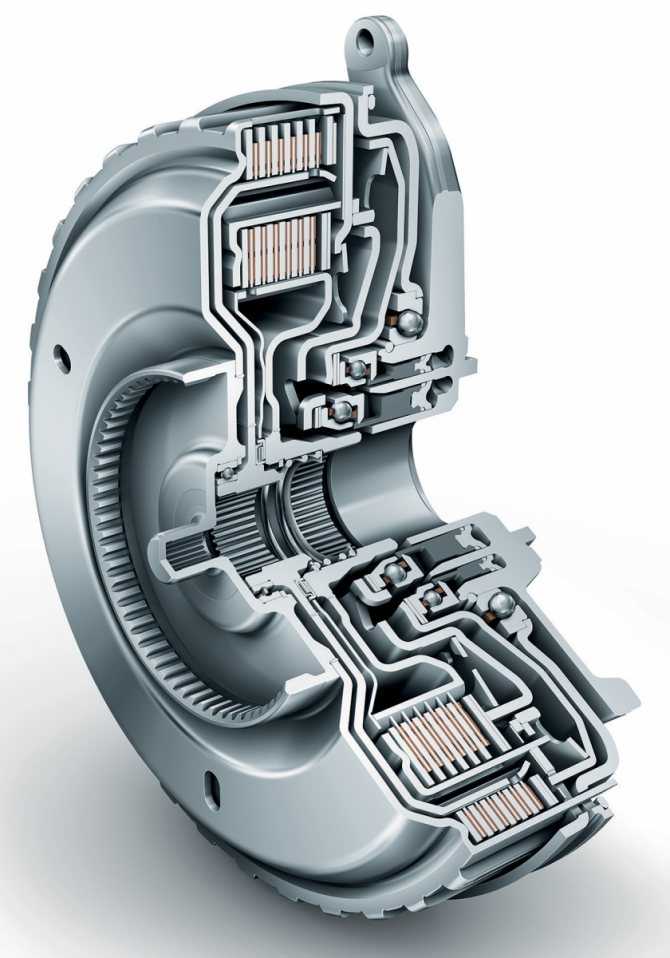 Используемый материал зависит от производителя. Червячные передачи используются в приложениях с большой нагрузкой, требующих высоких скоростей. Эти редукторы также могут быть сконфигурированы для работы под прямым углом.
Используемый материал зависит от производителя. Червячные передачи используются в приложениях с большой нагрузкой, требующих высоких скоростей. Эти редукторы также могут быть сконфигурированы для работы под прямым углом. Комбинация мотор-редукторов снижает сложность, экономит время на согласование компонентов и снижает затраты в конструкциях, требующих высокого крутящего момента на низкой скорости. Мотор-редукторы могут быть изготовлены как цельные или объединенные в виде отдельных компонентов. Мотор-редукторы, в которых двигатель и редуктор имеют общий вал, называются интегральными.
Комбинация мотор-редукторов снижает сложность, экономит время на согласование компонентов и снижает затраты в конструкциях, требующих высокого крутящего момента на низкой скорости. Мотор-редукторы могут быть изготовлены как цельные или объединенные в виде отдельных компонентов. Мотор-редукторы, в которых двигатель и редуктор имеют общий вал, называются интегральными. Как правило, количество зубьев шестерни пропорционально ее окружности. Это означает, что шестерня с большей окружностью будет иметь больше зубьев. Соотношение между окружностями двух шестерен также может дать точное передаточное число. Например, если у одной шестерни 36 зубьев, а у другой шестерни 12 зубьев, передаточное число будет 3:1.
Как правило, количество зубьев шестерни пропорционально ее окружности. Это означает, что шестерня с большей окружностью будет иметь больше зубьев. Соотношение между окружностями двух шестерен также может дать точное передаточное число. Например, если у одной шестерни 36 зубьев, а у другой шестерни 12 зубьев, передаточное число будет 3:1. Например, чем больше число зубьев на выходной шестерне, тем больше скорость на выходном валу. И наоборот, чем больше зубьев шестерни на выходе по сравнению с входом, тем меньше скорость на выходном валу. Обычно выходную скорость можно определить, разделив входную скорость на передаточное число. Чем выше коэффициент, тем ниже будет выходная скорость, и наоборот.
Например, чем больше число зубьев на выходной шестерне, тем больше скорость на выходном валу. И наоборот, чем больше зубьев шестерни на выходе по сравнению с входом, тем меньше скорость на выходном валу. Обычно выходную скорость можно определить, разделив входную скорость на передаточное число. Чем выше коэффициент, тем ниже будет выходная скорость, и наоборот. Поскольку передаваемая нагрузка распределяется между несколькими сателлитами, крутящий момент увеличивается. Большее количество планет в зубчатой передаче повысит нагрузочную способность и повысит плотность крутящего момента. Зубчатые передачи улучшают стабильность и жесткость при вращении за счет создания сбалансированной системы.
Поскольку передаваемая нагрузка распределяется между несколькими сателлитами, крутящий момент увеличивается. Большее количество планет в зубчатой передаче повысит нагрузочную способность и повысит плотность крутящего момента. Зубчатые передачи улучшают стабильность и жесткость при вращении за счет создания сбалансированной системы.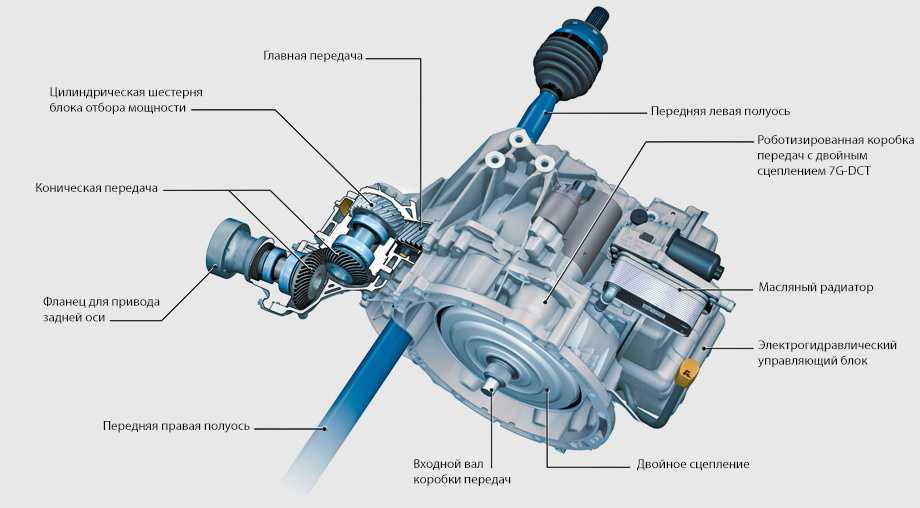
 ) люфт имеет решающее значение для точности и позиционирования.
) люфт имеет решающее значение для точности и позиционирования.
 Существует два типа конических шестерен: прямые и спиральные
Существует два типа конических шестерен: прямые и спиральные Зубчатая передача создает скорость вращения за счет зацепления шестерен, вращающихся
Зубчатая передача создает скорость вращения за счет зацепления шестерен, вращающихся