
Крутящий момент и мощность мотобура
Так уж повелось, что любого пользователя техники оснащенной бензиновым двигателем при оценке способностей своего агрегата будь то бензопила, мотокоса, газонокосилка или мотобур в первую очередь интересует такой технический показатель, как мощность двигателя. Конечно мощность двигателя очень важна, но в отношении к мотобуру мощность двигателя является второстепенной величиной. Самый важный показатель в мотобуре это крутящий момент который выдает понижающий редуктор буровой трансмиссии, передавая вращение двигателя на буровой шнек.
Как известно мощность двигателя измеряется в лошадиных силах или ваттах. Лошади как все мы знаем бывают разные, дохлые клячи или богатырские тяжеловозы. Поэтому лошадиная сила в бензиновом двигателе отсчитывается от официальной единицы мощности названной по имени создателя, шотландского инженера Джеймса Уатта. Для удобства использования и отказа от нескольких нулей 1 ватт увеличили до 1 киловатта и расчет одного киловатта равен 1. 36 л.с..
36 л.с..
А что же такое крутящий момент? Начнем с печального — про него часто забывают покупая мотобур. Но именно крутящий момент создаваемый двигателем увеличивается редуктором, пропорционально передаточному числу зубчатых колес или разности объема гидравлических компонентов ( если мотобур имеет гидравлический привод ). По своей сути мощность и крутящий момент связанные друг с другом величины. Мощность двигателя можно рассчитать по простой формуле — крутящий момент двигателя в ньютон-метрах, умноженный на число оборотов и на 0,1047.
Как правило крутящий момент больше у того двигателя, у которого больше объем цилиндра. У четырехтактных двигателей при равном объеме, крутящий момент будет больше. Если объем цилиндра например 52 кубических сантиметра, то крутящий момент и мощность двигателя на разных двигателях разных производителей будет примерно одинаковым. Мощность 2.2 — 2.6 л/с , крутящий момент 2-2.5 Нм. Конечно мощность и крутящий момент на двигателе одинаковых объемов можно увеличить.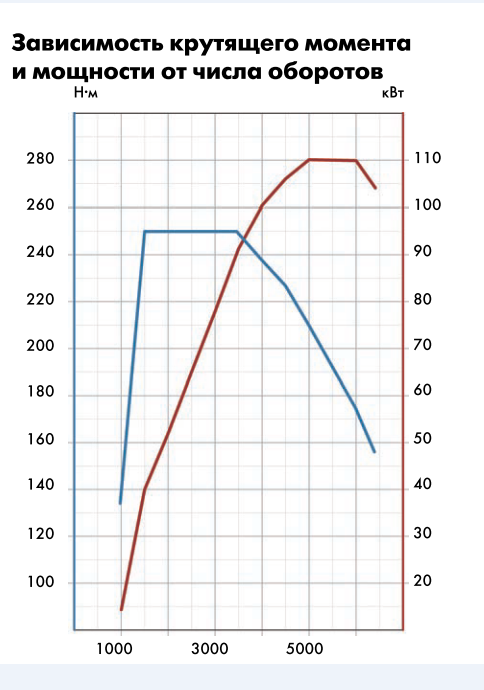 Но для этого нужна например воздушная турбина и никакого «специального» карбюратора для увеличения мощности не существует. Как вы понимаете турбину на мотокосе, бензопиле или мотобуре никто из производителей использовать не будет. Это дорого и прежде всего опасно. Да и не нужно.
Но для этого нужна например воздушная турбина и никакого «специального» карбюратора для увеличения мощности не существует. Как вы понимаете турбину на мотокосе, бензопиле или мотобуре никто из производителей использовать не будет. Это дорого и прежде всего опасно. Да и не нужно.
Ну а теперь продолжим о самом главном, для чего нужен крутящий момент для мотобура и как его можно увеличить. Если говорить просто и не углубляясь в формулы, то крутящий момент эта та самая сила, которая отвечает за бурение грунта. Чем выше эта сила, тем легче будет мотобуру пробурить отверстие в тяжелой глине. Если вы внимательно прочитали предыдущий текст, то вы поняли, что у двигателей которые используются на мотобурах не самый высокий крутящий момент. То есть для бурения грунта нужен механизм который сможет увеличить крутящий момент и передать его на буровой шнек. Для этого на бензобурах используются зубчатые редукторы или гидравлическая система. Эти механизмы увеличивают крутящий момент, уменьшают количество оборотов на выходном валу редуктора и делают возможным бурение грунта. Чем больше передаточное число редуктора, тем ниже количество оборотов бурового шнека и выше крутящий момент доступный для бурения.
Чем больше передаточное число редуктора, тем ниже количество оборотов бурового шнека и выше крутящий момент доступный для бурения.
Так например если взять простой двухтактный двигатель мощностью 2 л/с с крутящим моментом 2 Нм вместе с редуктором с понижающем соотношением 1:20, то крутящий момент на выходном валу будет равен 40 Нм, а если на тот же самый двигатель с той же самой мощностью поставить редуктор с соотношением 1:40, то крутящий момент будет в два раза выше 80 Нм. При одинаковой мощности двигателя второй мотобур с более высоким крутящим моментом на выходном валу редуктора будет легче бурить глину и что очень важно намного безопаснее т.к. уменьшится количество оборотов бурового шнека.
Поэтому покупая мотобур обратите внимание не только на мощность, но и крутящий момент получаемый редукторами с разным передаточным числом. К сожалению редукторы с большим передаточным числом имеют большую массу из-за зубчатых колес требуемых для понижения оборотов и корпуса, который делают из чугуна.
Как вариант можно увеличить величину крутящего момента поставив на выходной вал мотобура дополнительную понижающую ступень в виде цепной передачи которая увеличит крутящий момент и позволит сохранить направление вращения. Так делали многие самодельщики в США в конце 80-х , а в наше время наши отечественные умельцы переняли этот безусловно полезный опыт.
Лучшими по своим буровых характеристикам являются мотобуры с гидравлической системой понижения оборотов и увеличения крутящего момента. Они не страдают техническими проблемами свойственным агрегатам со сцеплением и зубчатыми колесами и только они способны справиться с самым тяжелым грунтом при этом оставаясь безопасными в использовании.
КРУТЯЩИЙ МОМЕНТ или МОЩНОСТЬ двигателя
…лошадиные силы помогают заработать миллионы, а ньютонометры — выигрывают гонки!Вот уже более 100 лет двигатели внутреннего сгорания используются практически во всех областях транспорта. Они являются «сердцем» автомобиля, трактора, тепловоза, корабля, самолёта и за последние тридцать-сорок лет стали представлять собой своеобразный симбиоз последних достижений науки и техники. Для нас уже привычными стали такие термины, как МОЩНОСТЬ и КРУТЯЩИЙ МОМЕНТ, которые являются необходимым критерием оценки силовых возможностей двигателя. Но возникает вопрос — на сколько правильно каждый из нас сможет оценить потенциал двигателя, имея перед глазами лишь цифры с техническими данными автомобиля?
Для нас уже привычными стали такие термины, как МОЩНОСТЬ и КРУТЯЩИЙ МОМЕНТ, которые являются необходимым критерием оценки силовых возможностей двигателя. Но возникает вопрос — на сколько правильно каждый из нас сможет оценить потенциал двигателя, имея перед глазами лишь цифры с техническими данными автомобиля?
Уверены, что Вы не станете целиком полагаться на заверения продавца в автосалоне, что мотор приобретаемого Вами авто достаточно мощный и полностью Вас удовлетворит. Поэтому Вы приняли решение модернизировать свой двигатель и стоите перед дилеммой – провести оптимизацию для увеличения мощности или увеличить крутящий момент? Для того, чтобы потом не пожалеть о не правильном приобретении и выборе, рекомендуем ознакомиться со всем изложенным ниже.
С давних времён для строительства, перемещения грузов, а так же транспортировки людей человечество использовало всевозможные механизмы и устройства. С изобретением более чем 5 тыс. лет назад ЕГО ВЕЛИЧЕСТВА КОЛЕСА, теория механики претерпела серьёзные изменения. Изначально, роль колеса сводилась только к банальному уменьшению сопротивления (силы трения) и переводу силы трения в качение. Конечно, катить круглое гораздо приятней, чем тащить квадратное!
Изначально, роль колеса сводилась только к банальному уменьшению сопротивления (силы трения) и переводу силы трения в качение. Конечно, катить круглое гораздо приятней, чем тащить квадратное!
Но качественное изменение способа применения колеса произошло намного позднее благодаря появлению другого гениального изобретения ― ДВИГАТЕЛЯ! Отцом парового локомотива, чаще называют Джорджа Стивенсона, который построил в 1829 году свой знаменитый паровоз «Ракета». Но ещё в 1808 году англичанин Ричард Тревитик демонстрирует одно из самых революционных изобретений в истории – первый паровоз. Но к нашей всеобщей радости Тревитик сначала построил паровой автомобиль для уличного движения, а затем уж только пришел к мысли o паровозе. Таким образом, автомобиль является в некотором роде прародителем паровоза. К сожалению, судьба первооткрывателя Ричард Тревитика, как впрочем, многих инженеров, но не коммерсантов, сложилась печально. Он разорился, долго жил на чужбине, и умер в нищете. Но не будем о грустном…
Наша задача ― понять, что такое крутящий момент и мощность двигателя, и она значительно упростится, если вспомнить устройство паровоза. Кроме пассивного преобразователя трения из одного вида в другой, колесо стало выполнять еще одну задачу — создавать движущую (тяговую) силу, то есть, отталкиваясь от дороги, приводить в движение экипаж. Давление пара действует на поршень, тот, в свою очередь, давит на шатун, последний проворачивает колесо, создавая КРУТЯЩИЙ МОМЕНТ. Вращение колеса под действием крутящего момента вызывает появление пары сил. Одна из них — сила трения между рельсом и колесом — как бы отталкивается от рельса назад, а вторая — та самая искомая нами СИЛА ТЯГИ через ось колеса передается на детали рамы паровоза. На примере паровоза заметно, что чем больше давление пара, действующее на поршень, а через него — на шатун, тем большая сила тяги будет толкать его вперед. Очевидно, изменяя давление пара, диаметр колеса и положение точки крепления шатуна относительно центра колеса, можно менять силу и скорость паровоза. То же самое происходит в автомобиле.
Кроме пассивного преобразователя трения из одного вида в другой, колесо стало выполнять еще одну задачу — создавать движущую (тяговую) силу, то есть, отталкиваясь от дороги, приводить в движение экипаж. Давление пара действует на поршень, тот, в свою очередь, давит на шатун, последний проворачивает колесо, создавая КРУТЯЩИЙ МОМЕНТ. Вращение колеса под действием крутящего момента вызывает появление пары сил. Одна из них — сила трения между рельсом и колесом — как бы отталкивается от рельса назад, а вторая — та самая искомая нами СИЛА ТЯГИ через ось колеса передается на детали рамы паровоза. На примере паровоза заметно, что чем больше давление пара, действующее на поршень, а через него — на шатун, тем большая сила тяги будет толкать его вперед. Очевидно, изменяя давление пара, диаметр колеса и положение точки крепления шатуна относительно центра колеса, можно менять силу и скорость паровоза. То же самое происходит в автомобиле.
Разница в том, что все преобразования сил осуществляются непосредственно в самом двигателе. На выходе из него мы имеем просто вращающийся вал, то есть, вместо силы, толкающей паровоз вперёд, здесь мы получаем круговое движение вала с определенным усилием ― КРУТЯЩИМ МОМЕНТОМ. А МОЩНОСТЬ, развиваемая двигателем, ― это всего лишь его способность вращаться как можно быстрее, одновременно создавая при этом на валу крутящий момент. Затем вступает в действие силовая передача автомобиля (трансмиссия), которая этот крутящий момент изменяет так, как нам нужно, и подводит к ведущим колесам. И только в контакте между колесом и дорожным покрытием крутящий момент снова «выпрямляется» и становится тяговой силой.
На выходе из него мы имеем просто вращающийся вал, то есть, вместо силы, толкающей паровоз вперёд, здесь мы получаем круговое движение вала с определенным усилием ― КРУТЯЩИМ МОМЕНТОМ. А МОЩНОСТЬ, развиваемая двигателем, ― это всего лишь его способность вращаться как можно быстрее, одновременно создавая при этом на валу крутящий момент. Затем вступает в действие силовая передача автомобиля (трансмиссия), которая этот крутящий момент изменяет так, как нам нужно, и подводит к ведущим колесам. И только в контакте между колесом и дорожным покрытием крутящий момент снова «выпрямляется» и становится тяговой силой.
Очевидно, что тяговую силу предпочтительно иметь наибольшую. Это обеспечит нужную интенсивность разгона, способность преодолевать подъемы и перевозить больше людей и груза. В технической характеристике автомобиля есть такие параметры, как число оборотов двигателя при максимальной мощности и максимальном крутящем моменте и величина этой мощности и момента. Как правило, они измеряются соответственно в оборотах в минуту (мин־¹), киловаттах (кВт) и ньютонометрах (Нм). Необходимо уметь правильно понимать внешнюю скоростную характеристику двигателя. Это графическое изображение зависимости мощности и крутящего момента от оборотов коленчатого вала. Наиболее показательной является форма кривой крутящего момента, а не его величина. Чем раньше достигается максимум и чем более полого кривая падает по мере увеличения оборотов (то есть мотор имеет неизменную тягу), тем правильнее спроектирован и работает двигатель. Однако получить двигатель, обладающий достаточным запасом мощности, высокими оборотами, да еще и стабильным КРУТЯЩИМ МОМЕНТОМ в широком диапазоне оборотов, непросто. Именно на это направлены применение наддува различных систем, электронного регулирования впрыска топлива, переменные фазы газораспределения, настройка выпускной системы и ряд других мероприяти
Необходимо уметь правильно понимать внешнюю скоростную характеристику двигателя. Это графическое изображение зависимости мощности и крутящего момента от оборотов коленчатого вала. Наиболее показательной является форма кривой крутящего момента, а не его величина. Чем раньше достигается максимум и чем более полого кривая падает по мере увеличения оборотов (то есть мотор имеет неизменную тягу), тем правильнее спроектирован и работает двигатель. Однако получить двигатель, обладающий достаточным запасом мощности, высокими оборотами, да еще и стабильным КРУТЯЩИМ МОМЕНТОМ в широком диапазоне оборотов, непросто. Именно на это направлены применение наддува различных систем, электронного регулирования впрыска топлива, переменные фазы газораспределения, настройка выпускной системы и ряд других мероприяти
Давайте рассмотрим пример. Вам предстоит преодолеть подъем, а увеличить скорость движения (разогнать автомобиль перед подъемом) нельзя из-за дорожной обстановки. Для сохранения темпа движения потребуется увеличить силу тяги. Тут часто возникает ситуация, которая выглядит так, добавление газа не даёт прироста силы тяги. Это вызывает снижение скорости, а значит, и оборотов двигателя, сопровождающееся дальнейшим уменьшением силы тяги на ведущих колесах.
Тут часто возникает ситуация, которая выглядит так, добавление газа не даёт прироста силы тяги. Это вызывает снижение скорости, а значит, и оборотов двигателя, сопровождающееся дальнейшим уменьшением силы тяги на ведущих колесах.
Так что же делать? Как поддержать большую тяговую силу при малой скорости движения, если двигатель «не тянет», то есть, не обеспечивает достаточный КРУТЯЩИЙ МОМЕНТ? Вступает в действие трансмиссия. Вы вручную, или автоматическая коробка передач самостоятельно, измените передаточное число так, чтобы сила тяги и скорость движения находились в оптимальном соотношении. Но это дополнительные неудобства в управлении автомобилем. Напрашивается вывод: было бы лучше, если бы двигатель сам приспосабливался к работе в таких ситуациях. Например, вы въезжаете на подъем. Сила сопротивления движению автомобиля возрастает, скорость падает, но силу тяги можно добавить, просто сильнее нажав на педаль газа. Автомобильные инженера для оценки этого параметра используют термин «ЭЛАСТИЧНОСТЬ ДВИГАТЕЛЯ».
Под эластичностью двигателя понимается соотношение между числом оборотов максимальной мощности и оборотов максимального крутящего момента (об/мин Pmax/об/мин Mmax). Оно должно быть таковым, чтобы по отношению к оборотам максимальной мощности обороты максимального крутящего момента были как можно ниже. Это позволит снижать и увеличивать скорость только за счет работы педалью газа, не прибегая к переключению передач, а также ехать на повышенных передачах с малой скоростью. Практически оценить эластичность мотора можно путем проверки способности автомобиля разгоняться от 60 до 100 км/ч на четвёртой передаче. Чем меньше времени займет этот разгон, тем эластичнее двигатель.
В подтверждение вышеизложенного, обратимся к результатам тестов автомобилей, проведенных в Европе:
— Audi А6 (двигатель 2,0 / 170 лс при 4300 об/мин / 280 Нм при 1800 об/мин)
— BMW 523i (двигатель 2,5 / 177 лс при 5800 об/мин / 230 Нм при 3500 об/мин)
— Mercedes E200 Kompressor Classic (двигатель 1,8 / 163 лс при 5500 об/мин / 240 Нм при 3000 об/мин)
Главным образом, рассмотрим характеристики Audi и BMW.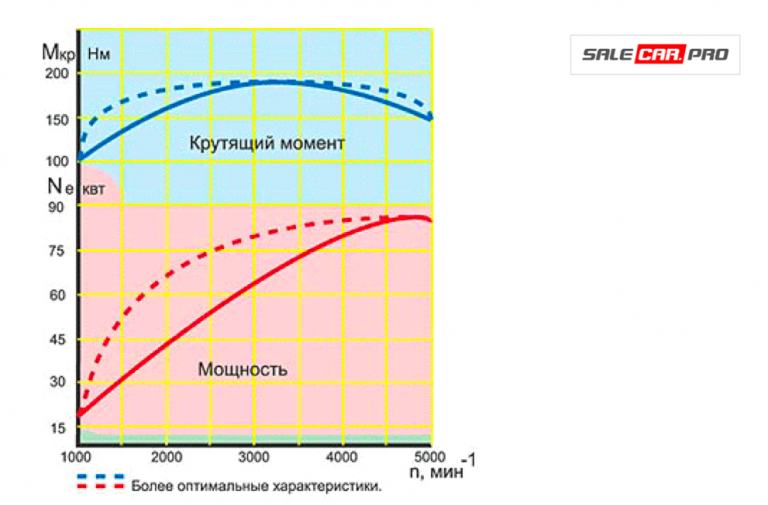 Двигатель Audi, гораздо меньшего объёма и почти такой же мощности, практически не уступает баварцу в разгоне с места, но зато в замерах на эластичность и экономичность кладёт конкурента на обе лопатки. Почему это происходит? Потому что коэффициент эластичности мотора Audi 2,39 (4300/1800) против 1,66 (5800/3500) у BMW, а поскольку вес автомобилей приблизительно равный, жеребец из Мюнхена позволяет дать завидную фору своему соотечественнику. Причём эти впечатляющие результаты достигаются на топливе АИ-95.
Двигатель Audi, гораздо меньшего объёма и почти такой же мощности, практически не уступает баварцу в разгоне с места, но зато в замерах на эластичность и экономичность кладёт конкурента на обе лопатки. Почему это происходит? Потому что коэффициент эластичности мотора Audi 2,39 (4300/1800) против 1,66 (5800/3500) у BMW, а поскольку вес автомобилей приблизительно равный, жеребец из Мюнхена позволяет дать завидную фору своему соотечественнику. Причём эти впечатляющие результаты достигаются на топливе АИ-95.
Итак, подведём итог!
Из двух двигателей одинакового объема и мощности, предпочтителен тот, у которого выше эластичность. При прочих равных условиях такой мотор будет меньше изнашиваться, работать с меньшим шумом и меньше расходовать топливо, а также упростит манипуляции с рычагом коробки передач. Под все эти условия попадают современные бензиновые и дизельные двигатели с наддувом. Эксплуатируя автомобиль с таким мотором, Вы получите массу приятных впечатлений!
Мощность, скорость и крутящий момент — MB Drive Services
Мощность, скорость и крутящий момент
Целью систем привода с регулируемой скоростью в основном является способность обеспечивать требуемый крутящий момент при соответствующей скорости. Простыми словами: повернуть вал. Конечно, количества мощности, скорости и крутящего момента связаны друг с другом. Эта статья является немного более теоретическим обзором. Тем не менее, мы подчеркиваем ключевые выводы, относящиеся к определению размеров и оптимизации привода. И, как обычно, мы иллюстрируем отношения на практических примерах, чтобы сделать вещи более очевидными и сделать эту статью более интересной для чтения.
Простыми словами: повернуть вал. Конечно, количества мощности, скорости и крутящего момента связаны друг с другом. Эта статья является немного более теоретическим обзором. Тем не менее, мы подчеркиваем ключевые выводы, относящиеся к определению размеров и оптимизации привода. И, как обычно, мы иллюстрируем отношения на практических примерах, чтобы сделать вещи более очевидными и сделать эту статью более интересной для чтения.
Зависимость между крутящим моментом, скоростью и мощностью
Указанные три величины напрямую связаны друг с другом. Механическая мощность является произведением крутящего момента на валу и угловой частоты вала. Механическая скорость в об/мин, как мы привыкли думать, это угловая частота, умноженная на константу 30/π.
Формула (4) верна для синхронной машины. Асинхронная машина, как видно из названия, работает с некоторым скольжением. Следовательно, механическая угловая частота в моторном (приводном) режиме будет немного ниже, чем в соотв. (4).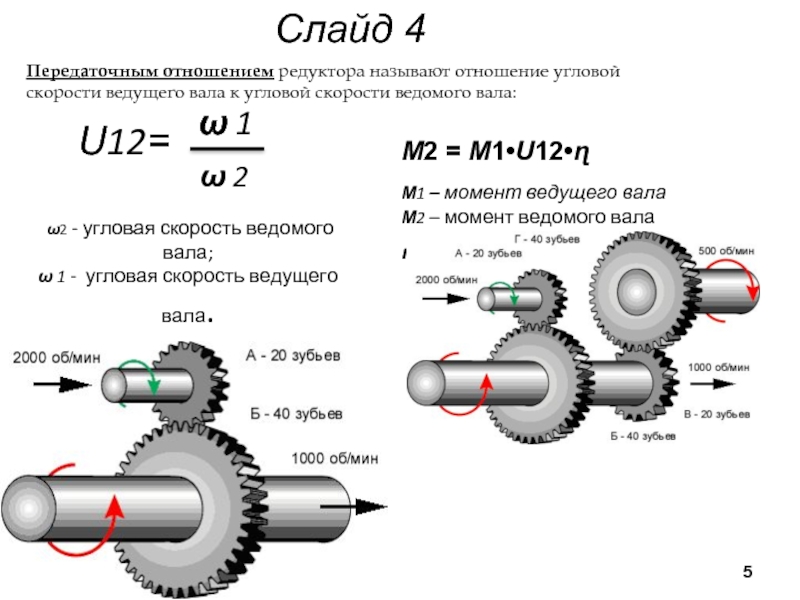 Номинальное скольжение средних и крупных электродвигателей находится в пределах 0,2 – 0,6 %.
Номинальное скольжение средних и крупных электродвигателей находится в пределах 0,2 – 0,6 %.
Наблюдения за соотношением мощности, скорости и крутящего момента
Что мы можем вывести из основных формул (1)–(4)?
1. Описывать двигатель только мощностью на валу не имеет особого смысла. Две машины, низкоскоростная и высокоскоростная, могут иметь одинаковую номинальную мощность, но их электрические и механические конструкции совершенно разные. Поэтому двигатель всегда должен определяться, среди прочего, комбинацией мощности на валу и соответствующей скорости или номинального крутящего момента и скорости. Третью величину всегда можно вычислить из уравнений (1) и (2).
2. Для достижения той же мощности при более низкой скорости крутящий момент должен увеличиться. Наоборот, быстроходная машина имеет сравнительно меньший крутящий момент и более компактна. Обратите внимание, что масса ротора пропорциональна крутящему моменту. Машины с высоким крутящим моментом имеют больший диаметр (высоту вала), больший вес и большую инерцию.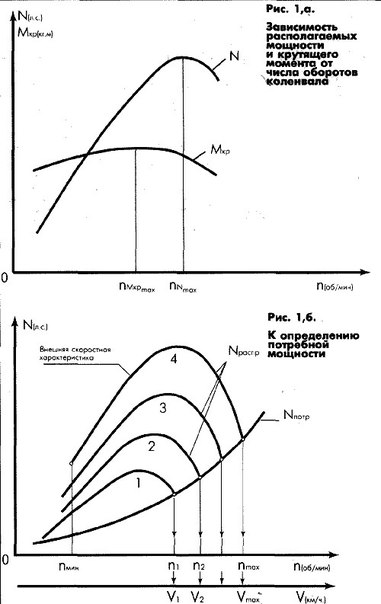
3. В приводных системах с частотно-регулируемым приводом, в отличие от двигателей с прямым подключением к сети, номинальная скорость вала двигателя может быть достигнута за счет сочетания пар полюсов двигателя и частоты питающей сети. Например, для достижения номинальной скорости 1 000 об/мин вы можете использовать 6-полюсную машину, поставляемую прибл. Электрическая частота 50,2 Гц от инвертора. Или вы используете 4-полюсную машину с номинальной электрической частотой ок. 33,5 Гц.
Обратите внимание, что большинство людей говорят о силе. Говоря о приводных системах с частотно-регулируемым приводом, мы должны понимать одну важную вещь:
– Величина измерения для частотно-регулируемого привода – это кажущаяся мощность, которая преобразуется в определенное напряжение и ток. достижение более высокой мощности означает последовательное подключение большего количества тиристоров или элементов)
– Другие частотно-регулируемые приводы, такие как преобразователи на основе NPC/ANPC, масштабируют мощность в зависимости от тока (для достижения более высокой мощности большее количество модулей подключается параллельно)
— высокоскоростной двигатель мощностью 5 МВт довольно компактный и легкий
— специальный низкоскоростной двигатель мощностью 5 МВт имеет большой диаметр тяжелые и очень дорогие
Обе машины имеют одинаковую мощность, указанную на паспортной табличке, но это, по сути, единственная общая черта. Их конструкции совершенно разные.
Их конструкции совершенно разные.
Оставим пока сухую теорию и рассмотрим практический пример. Мы сравниваем три разные машины. Все они имеют номинальную мощность 5,0 МВт. Однако они имеют разную номинальную скорость и крутящий момент.
Таблица 1: Крутящий момент в зависимости от инерции и веса различных машин с номинальной мощностью 5 МВт
Мы можем заметить, что низкоскоростная машина (двигатель 3) имеет гораздо более высокую инерцию. Это связано с тем, что низкоскоростные машины имеют больший диаметр. Машины с более высокой скоростью имеют меньший диаметр, поскольку ограничивающими факторами являются центробежные силы и скорость поверхности.
Как правило, чем ниже скорость, тем выше вес машины, особенно вес ротора (масса ротора увеличивается с увеличением крутящего момента). Тенденция хорошо видна при сравнении машин 1 и 3 или машин 2 и 3. При сравнении машин 1 и 2 может возникнуть вопрос, как это согласуется с только что сказанным. Машина со скоростью 2500 об/мин легче, чем машина со скоростью 3400 об/мин. Во-первых, машины в таблице 1 от разных производителей. Основная причина, однако, заключается в том, что двигатель 1 с 3400 об/мин является 2-полюсной машиной, а двигатель 2 имеет 4-полюсную конструкцию. 2-полюсные машины имеют меньшее использование электромагнитной конструкции.
Во-первых, машины в таблице 1 от разных производителей. Основная причина, однако, заключается в том, что двигатель 1 с 3400 об/мин является 2-полюсной машиной, а двигатель 2 имеет 4-полюсную конструкцию. 2-полюсные машины имеют меньшее использование электромагнитной конструкции.
Высокий крутящий момент по сравнению с высокой мощностью
Еще один пример, демонстрирующий, как требуемый крутящий момент влияет на размер и вес электродвигателя. Это действительно сногсшибательно. Обратите внимание, что это экстремальное сравнение, но оно основано на реальных машинах, построенных недавно (обе машины выпущены после 2010 года) и успешно эксплуатирующихся.
Машина A:
Первая машина представляет собой специальную сверхнизкоскоростную конструкцию для испытательного стенда ветряных турбин. Хотя номинальная мощность на валу составляет «всего» 5 МВт, она соответствует при номинальной частоте вращения 11 об/мин впечатляющим 4 341 кНм, а вес самого ротора превышает 130 000 кг! Ротор этой машины со сверхвысоким крутящим моментом имеет 30 полюсов, большой диаметр и короткую осевую длину.
Машина B:
Вторая машина — большой турбогенератор на теплоэлектростанции. Как обычно для таких машин, статор охлаждается водой, а ротор охлаждается водородом. Генераторы описываются с полной номинальной мощностью, чем мощность на валу. В этом случае номинальная полная мощность составляет почти 1200 МВА. При расчетном коэффициенте мощности 0,8 это соответствует прибл. 950 МВт. Турбогенератор имеет двухполюсный ротор и номинальную скорость 3000 об/мин.
Таблица 2. Сравнение высокомоментных и мощных электрических машин
Несмотря на то, что турбогенератор имеет почти в 200 раз большую номинальную мощность, тихоходный высокомоментный двигатель на самом деле имеет более тяжелый ротор. Если вы подсчитаете отношение массы ротора к крутящему моменту, то увидите, что оно практически одинаково для обеих машин!
У машины с высоким крутящим моментом мощностью 5 МВт крутящий момент составляет 30 кг/кНм, а у огромного турбогенератора — 31,9 кг/кНм.
Этот пример очень ясно показывает, что мощность двигателя сама по себе мало что говорит. На конструкцию двигателя сильно влияет требуемый крутящий момент в диапазоне низких скоростей и максимальная скорость и результирующие силы на более высоких скоростях.
Использование коробки передач
До сих пор мы не обсуждали использование коробки передач. Конечно, зубчатая передача является частью многих приводных приложений. Это и повышающая, и понижающая передача. Роль шестерни в механическом мире аналогична роли трансформатора в электрическом мире.
Повышающая передача используется в приложениях, требующих очень высоких скоростей. Примером может служить центробежный компрессор. Несмотря на то, что существуют высокоскоростные решения с прямым приводом, позволяющие использовать безредукторные приводные системы, обычное решение, как правило, представляет собой 4-полюсный двигатель с номинальной скоростью в диапазоне 1 500–2 000 об/мин в сочетании с повышающим редуктором.
Для очень низкоскоростных применений редуктор является альтернативой чрезвычайно низкоскоростному двигателю, который становится большим в диаметре, очень тяжелым и, соответственно, дорогим.
Выводы
Вот краткое изложение наиболее важных вещей из этой статьи:
– Крутящий момент является важной величиной для электромеханического проектирования вращающихся электрических машин. Чем выше крутящий момент, тем больше вес и инерция ротора. Машины с высоким крутящим моментом обычно тяжелее и дороже, чем машины с такой же мощностью на валу, но с более высокой номинальной скоростью.
– Конструкция двигателя определяется требованиями к крутящему моменту и скорости.
– конструкция частотно-регулируемого привода зависит от тока и напряжения. В зависимости от топологии частотно-регулируемого привода мощность масштабируется либо по току (параллельное соединение полупроводников или модулей), либо по напряжению (последовательное соединение полупроводников или ячеек).
– В приложениях с частотно-регулируемым приводом номинальная электрическая частота может быть выбрана произвольно и не обязательно должна быть 50 Гц или 60 Гц. По сравнению с машинами прямого подключения (DOL) существует дополнительная степень свободы для поиска оптимальной конструкции машины.
В следующих статьях мы обсудим несколько связанных тем. Например, базовое объяснение того, как работает асинхронная машина. Также мы объясним, как выбор номинальной электрической частоты двигателя позволяет оптимизировать производительность и уменьшить вибрации.
Каталожные номера
[1] Пуск двигателя с ЧРП, https://mb-drive-services.com/vfd-motor-start/
[2] Типы и характеристики нагрузки, https://mb-drive-services. com/типы нагрузки и характеристики/
[3] Двигатели и генераторы ABB, https://new.abb.com/motors-generators
[4] Приводы переменного тока среднего напряжения, https://new.abb.com/drives/medium-voltage-ac -drives
[5] Брошюра по синхронным машинам, Загрузить брошюру
Ток, мощность и крутящий момент в приводах с переменной скоростью
Поведение тока и мощности в системе привода с регулируемой скоростью не всегда хорошо понимается пользователями, особенно вопрос о том, как входной и выходной токи привода изменяются в зависимости от скорости вращения вала двигателя. и изменение нагрузки. В этом блоге мы рассмотрим основное поведение приводов с регулируемой скоростью, чтобы прояснить, как соотносятся эти значения. Это помогает понять поведение системы и учесть влияние различной нагрузки на энергопотребление и номинальную мощность основных компонентов. Мы кратко рассмотрим приводы постоянного тока (управляемого выпрямителя), а также приводы инвертора переменного тока, так как есть некоторые интересные различия.
и изменение нагрузки. В этом блоге мы рассмотрим основное поведение приводов с регулируемой скоростью, чтобы прояснить, как соотносятся эти значения. Это помогает понять поведение системы и учесть влияние различной нагрузки на энергопотребление и номинальную мощность основных компонентов. Мы кратко рассмотрим приводы постоянного тока (управляемого выпрямителя), а также приводы инвертора переменного тока, так как есть некоторые интересные различия.
Ток двигателя
Крутящий момент, создаваемый электродвигателем, всегда можно рассматривать как произведение магнитного потока, действующего на проводники с током. Для данного уровня потока двигателя крутящий момент является прямой функцией тока, связывающего поток.
Игнорируя эффекты второго порядка, мы можем обобщить это для двигателей постоянного и переменного тока:
- ток якоря.
- В двигателе переменного тока без постоянного магнита амплитуда потока определяется отношением приложенного напряжения к частоте.
 Крутящий момент представляет собой произведение потока и тока, создающего крутящий момент, то есть составляющую тока, которая находится в фазе с напряжением.
Крутящий момент представляет собой произведение потока и тока, создающего крутящий момент, то есть составляющую тока, которая находится в фазе с напряжением.
В двигателях постоянного тока и асинхронных двигателях переменного тока ток намагничивания обычно является постоянным независимо от крутящего момента, если только не применяется специальное энергосберегающее управление при уменьшенном крутящем моменте. Для небольшого асинхронного двигателя ток намагничивания может составлять значительную долю (например, 70%) от номинального тока. Преимущество двигателя с постоянными магнитами заключается в том, что не требуется ток намагничивания, что позволяет избежать потерь, связанных с этим током.
На рис. 1 показано типичное изменение (нормализованного) тока двигателя в зависимости от крутящего момента для асинхронного двигателя с фиксированным напряжением питания. Отклонение от скорости незначительное.
Мощность двигателя
Мощность на валу определяется произведением крутящего момента на скорость.
Если пренебречь потерями, то потребляемая электрическая мощность определяется для машины постоянного тока как произведение постоянного напряжения и тока, а для машины переменного тока как произведение среднеквадратичного значения. напряжение и составляющая тока в фазе с напряжением, так как ток обычно отстает по фазе от напряжения.
В первом приближении ток зависит от крутящего момента, а напряжение от скорости. Входная мощность аналогична выходной мощности, за исключением потерь, которые при номинальной мощности обычно находятся в диапазоне от 5% до 20% номинальной мощности.
Приводные токи и мощность
Поскольку в приводах используются коммутационные устройства с минимальными потерями мощности, около 2%, входная мощность должна быть очень близка к выходной мощности. Поведение входного тока привода немного менее очевидно.
На рис. 2 показаны основные элементы выпрямителя якоря привода постоянного тока.
Тиристоры позволяют регулировать выходное напряжение для управления крутящим моментом и скоростью двигателя. Обратите внимание, что между фазами входа и выхода существует непрерывность, без альтернативных путей тока, таких как конденсаторы или общие соединения. За исключением короткого интервала перекрытия, только два тиристора в любой момент времени проводят ток, поэтому ток нагрузки всегда должен протекать во входных фазах, если только не установлен обратный диод.
Обратите внимание, что между фазами входа и выхода существует непрерывность, без альтернативных путей тока, таких как конденсаторы или общие соединения. За исключением короткого интервала перекрытия, только два тиристора в любой момент времени проводят ток, поэтому ток нагрузки всегда должен протекать во входных фазах, если только не установлен обратный диод.
Привод постоянного тока — выход
Ток на выходе привода постоянного тока представляет собой ток якоря двигателя, который пропорционален крутящему моменту. Имеется дополнительный небольшой преобразователь для питания поля.
Привод постоянного тока — вход
Если мы теперь посмотрим, как на входной ток влияет работа двигателя, мы увидим, что величина входного тока прямо пропорциональна крутящему моменту в очень простом соотношении. Если текущие пульсации можно игнорировать, то . Это не зависит от скорости или выходного напряжения.
Как тогда входная мощность может изменяться в соответствии с выходной, если входной ток и напряжение не зависят от скорости? Ответ заключается в том, что коэффициент входной мощности изменяется, поскольку, когда выпрямитель сдвинут по фазе (угол включения больше 0°), входной ток отстает по фазе от напряжения питания. В крайнем случае, если двигатель неподвижен, но развивает номинальный крутящий момент, поэтому мощность на валу равна нулю, входной ток по-прежнему имеет номинальное значение, но с отставанием по фазе, которое составило бы 90 °, если бы не потери. Это может быть довольно серьезным недостатком приводов постоянного тока и является причиной того, что большие приводы постоянного тока часто используются с конденсаторами для коррекции коэффициента мощности.
В крайнем случае, если двигатель неподвижен, но развивает номинальный крутящий момент, поэтому мощность на валу равна нулю, входной ток по-прежнему имеет номинальное значение, но с отставанием по фазе, которое составило бы 90 °, если бы не потери. Это может быть довольно серьезным недостатком приводов постоянного тока и является причиной того, что большие приводы постоянного тока часто используются с конденсаторами для коррекции коэффициента мощности.
Привод переменного тока — выход
Выходной ток привода переменного тока — это ток двигателя, который, как мы видели, включает в себя компонент, создающий крутящий момент, и компонент намагничивания, причем последний обеспечивается приводом независимо от требуемого крутящего момента. Таким образом, ток в инверторной ступени, на который приходится большая часть материальных затрат привода, является функцией выходного крутящего момента вместе с постоянной составляющей. На скорость почти не влияет.
Привод переменного тока – вход
На рис.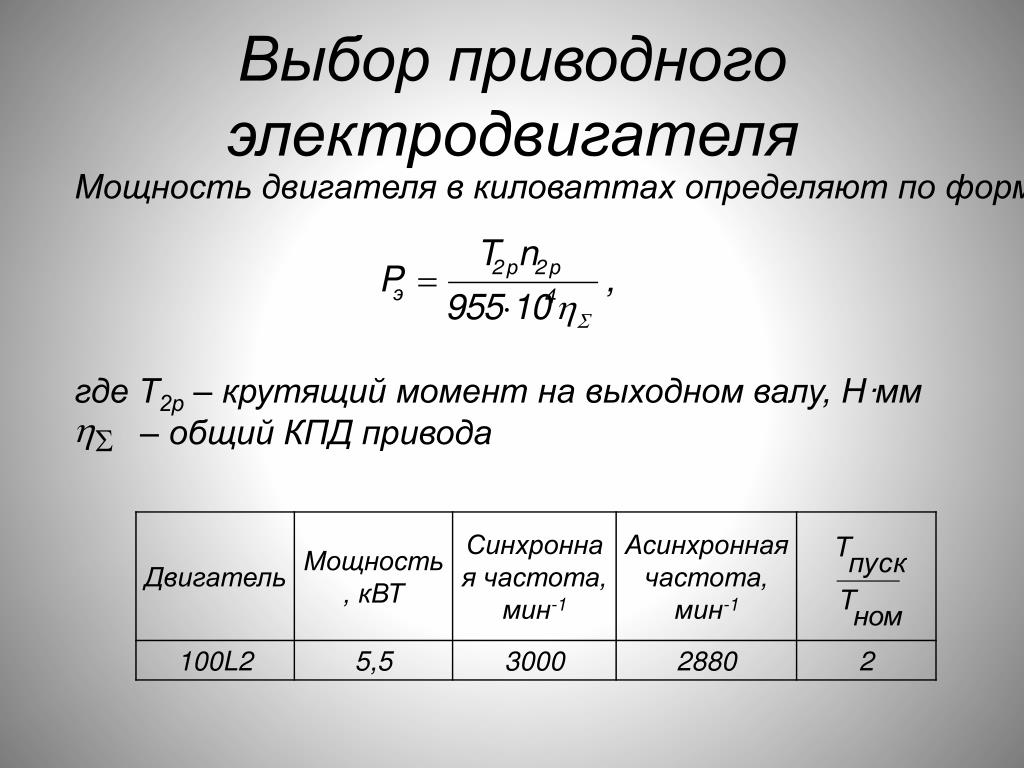 3 показаны основные элементы инверторного привода переменного тока.
3 показаны основные элементы инверторного привода переменного тока.
Три фазы инвертора подключены к одной и той же цепи шины постоянного тока, которая питается от выпрямителя. Наличие этой общей связи означает, что при выходном напряжении инвертора меньше его максимального значения, т.е. на скорости меньше базовой, выходной ток частично циркулирует между фазными ветвями инвертора. То же самое относится и к реактивной части выходного тока. Шина постоянного тока должна обеспечивать только фактическую мощность, необходимую двигателю, то есть произведение выходного напряжения и реальной (активной) части тока. Напряжение постоянного тока фиксируется напряжением питания, поэтому постоянный ток изменяется пропорционально мощности или скорости, если крутящий момент постоянный.
Входной ток выпрямителя отражает ток шины постоянного тока. Входная мощность практически такая же, как мощность шины постоянного тока, так как потери в выпрямителе пренебрежимо малы. Среднеквадратичное значение значение тока несколько выше, чем можно было бы ожидать для мощности, поскольку форма волны не синусоидальна, т. е. ток содержит гармоники. По мере увеличения тока гармоники становятся пропорционально меньше из-за сглаживающего эффекта сглаживающих дросселей или дросселей для подавления гармоник. При номинальной мощности нагрузки среднеквадратичное значение входной ток часто довольно близок к среднеквадратичному значению. выходной ток, и это может привести к тому, что пользователи будут считать их одинаковыми. Однако на самом деле это просто совпадение: типичные двигатели имеют коэффициент мощности около 0,85, а типичные приводы имеют коэффициент искажения около 0,85. При пониженной скорости два потока становятся совершенно разными.
е. ток содержит гармоники. По мере увеличения тока гармоники становятся пропорционально меньше из-за сглаживающего эффекта сглаживающих дросселей или дросселей для подавления гармоник. При номинальной мощности нагрузки среднеквадратичное значение входной ток часто довольно близок к среднеквадратичному значению. выходной ток, и это может привести к тому, что пользователи будут считать их одинаковыми. Однако на самом деле это просто совпадение: типичные двигатели имеют коэффициент мощности около 0,85, а типичные приводы имеют коэффициент искажения около 0,85. При пониженной скорости два потока становятся совершенно разными.
Подводя итог, на рис. 4 показано, как входной и выходной ток типичного привода переменного тока изменяются при изменении скорости и крутящего момента. Все величины нормированы таким образом, чтобы номинальное или базовое значение равнялось 1,0.
Имеется только одна линия для выходного тока, так как он почти не зависит от скорости. Входной ток увеличивается в зависимости от произведения крутящего момента и скорости, но с уменьшением наклона, поскольку влияние дросселей становится более выраженным по мере приближения к номинальному току, улучшая коэффициент мощности за счет уменьшения гармоник тока. Имеются небольшие фиксированные потери и некоторые потери, зависящие от крутящего момента, как показано на линии для нулевой скорости, в основном вызванные резистивными потерями в обмотках двигателя.
Имеются небольшие фиксированные потери и некоторые потери, зависящие от крутящего момента, как показано на линии для нулевой скорости, в основном вызванные резистивными потерями в обмотках двигателя.
Направление крутящего момента и скорости – регенерация
Для простоты приведенное выше обсуждение относится к одноквадрантным ситуациям. Если крутящий момент и/или скорость могут измениться, необходимо принять во внимание некоторые дополнительные факторы.
Для приводов постоянного тока в четырехквадрантном приложении требуется два тиристорных моста для обеспечения двунаправленного постоянного тока. Поведение входного тока при изменении направления вращения является продолжением одноквадрантного случая, когда коэффициент мощности проходит через ноль при нулевой скорости, а затем снова возрастает до максимума примерно 0,82, но с обратной фазой действительной части, что дает обратную мощность потока.
Для приводов переменного тока неуправляемый выпрямитель не может возвращать питание в сеть. Инвертор по своей природе является рекуперативным, поэтому при капитальной нагрузке шина постоянного тока получает возвращенную мощность, и требуется резистивная тормозная цепь, чтобы избежать отключения из-за перенапряжения. Тогда входной ток равен нулю.
Инвертор по своей природе является рекуперативным, поэтому при капитальной нагрузке шина постоянного тока получает возвращенную мощность, и требуется резистивная тормозная цепь, чтобы избежать отключения из-за перенапряжения. Тогда входной ток равен нулю.
Мы можем обобщить все вышеперечисленное на графике, как показано на рис. 5. Это относится к (довольно теоретической) нагрузке с постоянным крутящим моментом, т. е. к такой, при которой крутящий момент остается постоянным во всем диапазоне скоростей от -100 % до +100 %. . На практике это происходит с подъемником или лебедкой, несущей фиксированный груз, и когда ускорение достаточно низкое, чтобы мы могли игнорировать силу, необходимую для ускорения груза. Другими словами, мы медленно изменяем скорость.
На рис. 5 мы начинаем с максимальной скорости. Как для приводов постоянного, так и переменного тока входной ток составляет около 100 %. Теперь начинаем снижать скорость. Для привода постоянного тока величина входного тока остается неизменной, и мы можем сказать, что скорость падает, только если посмотрим на его активную составляющую (в фазе с напряжением). Для привода переменного тока входной ток падает не совсем пропорционально скорости.
Для привода переменного тока входной ток падает не совсем пропорционально скорости.
При нулевой скорости входной ток привода постоянного тока все еще немного превышает 100 %. Его фазовый угол почти -90°, причем единственная активная часть тока обусловлена потерями мощности, так как мощность на валу равна нулю. Входной ток привода переменного тока очень мал, обеспечивая только потери мощности. Коэффициент мощности довольно низкий, потому что сглаживающие дроссели мало влияют на такой малый ток, но это не имеет практического значения, так как ток намного ниже номинального значения.
При отрицательных скоростях входной ток привода постоянного тока все еще равен номинальному значению, но действительная часть стала отрицательной, поэтому привод возвращает рекуперированную энергию в сеть с довольно низким коэффициентом мощности. Привод переменного тока имеет нулевой ток, потому что входной выпрямитель заблокирован, а потери мощности привода компенсируются за счет рекуперации мощности от нагрузки.