Кинематические схемы планетарных механизмов АКПП
Итак, как уже отмечалось, планетарные механизмы появились на автомобилях в начале ХХ-го столетия. И первым серийно выпускаемым автомобилем с планетарной, но не автоматической, коробкой передач был знаменитый ФОРД-Т. Это была коробка, позволяющая реализовать две передачи переднего хода, одна из которых прямая, и одну передачу заднего хода. Она состоит из двух планетарных рядов (характерной особенностью которых было положительное значение внутреннего передаточного отношения при остановленном водиле) двух ленточных тормозов и одной блокировочной муфты (рис.1). Причем водило для этих двух планетарных рядов является общим элементом, и одновременно ведущим звеном 0.
|
Рис.1. |

При затяжке тормоза звена 2 коробка работает в редукторном режиме, а при включении тормоза звена 1 реализуется передача заднего хода. Включение блокировочной муфты, установленной между ведущим звеном 0 и ведомым Х приводит к полной блокировки планетарного механизма, что соответствует прямой передачи. Конструкция этой коробки была далеко несовершенной, и, кроме того, наличие двух передач было явно не достаточно, но все равно она долгое время использовалась на автомобилях ФОРД-Т.
Прежде, чем рассмотреть кинематические схемы
построения планетарных механизмов современных АКПП, познакомимся с
основными элементами планетарных механизмов. Любой планетарный механизм
(рис.2) состоит из ведущего звена (О), ведомого звена (Х), звеньев (1,2,
3,…), планетарных рядов (ПР1, ПР2,…) и трех типов элементов управления:
тормозов (Т1, Т2,…), блокировочных муфт (М1, М2,…) и муфт свободного хода
(А1, А2,…).
Как правило, современные АКПП состоят из двух или трех планетарных рядов. Причем, используются в основном планетарные ряды второго класса, т.е. планетарные ряды с отрицательным внутренним передаточным отношением.
Тормоз предназначен для остановки (блокировки с картером) звеньев планетарного механизма. При включении тормоза какого-либо звена его угловая скорость становится равной нулю, так, например, при включении тормоза Т1 (рис.2) угловая скорость первого звена ω1=0. Тормоз может быть ленточным (Т1), дисковым (Т2) или в качестве тормоза может быть использована муфта свободного хода (А1).
Блокировочная муфта служит для жесткого
соединения (блокировки) любых двух звеньев планетарного механизма. При ее
включении угловые скорости звеньев, которые она соединяет, становятся
равными. Например, включение муфты М1 (рис.
|
Рис.2. |
В теории планетарных механизмов планетарные коробки передач принято классифицировать по числу степеней свободы, которыми они обладают в случае полного выключения всех элементов управления. Коробки бывают:
· двухстепенными;· трехстепенными;
· четырехстепенными и т.д.
Для включения передачи в случае двухстепенной
коробки передач, необходимо воздействовать на один элемент управления.
Причем, если это будет блокировочная муфта, то коробка полностью
заблокируется, что соответствует прямой передаче. Если коробка передач
обладает тремя степенями свободы, то для включения передачи необходимо
воздействовать на два элемента управления. При этом одновременное
включение двух блокировочных муфт приведет к блокировке коробки передач,
т.е. ее передаточное отношение будет равно 1. В случае четырехстепенной
коробки передач для включения передачи необходимо воздействие на три
элемента управления и т.д.
Если коробка передач
обладает тремя степенями свободы, то для включения передачи необходимо
воздействовать на два элемента управления. При этом одновременное
включение двух блокировочных муфт приведет к блокировке коробки передач,
т.е. ее передаточное отношение будет равно 1. В случае четырехстепенной
коробки передач для включения передачи необходимо воздействие на три
элемента управления и т.д.
Определить количество степеней свободы любой планетарной коробки передач достаточно просто. Для этого можно воспользоваться формулой Чебышева:
W = n — kмех
где W- число степеней свободы;
n – число звеньев, включая ведущее и ведомое;
kмех – число планетарных рядов, входящих в состав планетарной коробки передач.
Так, например, коробка
передач автомобиля ФОРД-Т (рис. 1) обладает двумя степенями свободы:
1) обладает двумя степенями свободы:
W=4-2=2,
а коробка передач, кинематическая схема которой представлена на рисунке 2, обладает тремя степенями свободы:
W=5-2=3.
В настоящее время в АКПП используются планетарные механизмы с тремя и четырьмя степенями свободы.
Долгое время легковые автомобили оснащались трехскоростными автоматическими коробками передач. Причем, как правило, они строились по одной из двух кинематических схем:
· схеме Симпсона;
· схеме, в которой используется планетарный ряд со сцепленными сателлитами.
Схема
Симпсона — схема, которая состоит из двух последовательно
расположенных планетарных рядов (рис.8). Оба ряда относятся ко второму
классу планетарных механизмов, т. е. их внутренние передаточные отношения
при остановленном водиле имеют отрицательные значения. Для управления используются две
блокировочные муфты, два ленточных тормоза и муфта свободного хода.
Особенностью является объединенные в одно звено малые центральные колеса
(МЦК) этих двух планетарных рядов. Большое центральное колесо (БЦК)
первого планетарного ряда и общие МЦК могут через две блокировочные муфты жестко
соединяться с ведущим валом (О).
Водило второго планетарного ряда оборудовано тормозом. Ведомое
звено (Х) входит в оба планетарных ряда – в первый в качестве водила, а во
второй в качестве БЦК. Схема Симпсона позволяет реализовать следующие
режимы:
е. их внутренние передаточные отношения
при остановленном водиле имеют отрицательные значения. Для управления используются две
блокировочные муфты, два ленточных тормоза и муфта свободного хода.
Особенностью является объединенные в одно звено малые центральные колеса
(МЦК) этих двух планетарных рядов. Большое центральное колесо (БЦК)
первого планетарного ряда и общие МЦК могут через две блокировочные муфты жестко
соединяться с ведущим валом (О).
Водило второго планетарного ряда оборудовано тормозом. Ведомое
звено (Х) входит в оба планетарных ряда – в первый в качестве водила, а во
второй в качестве БЦК. Схема Симпсона позволяет реализовать следующие
режимы:
· нейтраль;
· две понижающие передач;
· прямую передачу;
· задний ход.
|
Рис. |
В схеме со сцепленными сателлитами (рис.9) два планетарных ряда, также относящихся ко второму классу планетарных рядов, имеют общее водило с тремя парами сцепленных сателлитов. Каждая такая пара состоит из одного короткого и одного длинного сателлита. Каждое из двух независимых малых центральных колес имеют зацепление с одним из двух сцепленных сателлитов. Кроме того, имеется одно БЦК, которое входит в зацепление с длинными сателлитами. Для управления используются две блокировочные муфты, два тормоза и одна обгонная муфта. Схема позволяет реализовать следующие режимы:
· нейтраль;
· две понижающие передач;
· прямую передачу;
· задний ход.
|
Рис. |
 9.
9.Необходимость повышения топливной экономичности транспортных средств привело к требованию дополнения трехскоростных АКПП четвертой, повышающей, передачей. Здесь разработчики пошли двумя путями:
- стали искать новые кинематические схемы с целью получения четвертой передачи;
· дополнили уже существующие трехскоростные схемы дополнительным, так называемым, повышающим планетарным рядом.
Причем повышающий планетарный ряд устанавливается как перед основной коробкой передач (рис.10), так и после нее (рис.11).
|
Рис.10 |
|
Рис. |
 11.
11.
В повышающем планетарном ряду ведущим звеном является водило, а ведомым — большое центральное колесо. Этот ряд, как правило, оборудован блокировочной муфтой, муфтой свободного хода, дублирующей блокировочную муфту, и тормозом малого центрального колеса. На первых трех передачах переключения происходят в основной трехступенчатой коробке передач, а повышающий планетарный ряд заблокирован с помощью муфты свободного хода или блокировочной муфты (рис.10, 11). Для получения повышающей передачи в основной коробке включается третья (прямая) передача, а повышающий планетарный ряд разблокируется и в нем включается тормоз малого центрального колеса, что соответствует формированию повышающей передачи.
Использование повышающего планетарного ряда приводит к тому, что коробка передач становится четырехстепенной:
W = n — kмех = 7-3 = 4.
Поэтому для получения жесткой кинематической связи между ведущим и ведомым звеньями необходимо включить три элемента управления.
В настоящее время, практически, все фирмы, занимающиеся разработкой автоматических коробок передач, выпускают четырехступенчатые коробки, построенные с помощью двух планетарных рядов. Все эти коробки передач обладают тремя степенями свободы, что несколько упрощает их систему управления. Ниже представлены кинематические схемы четырехскоростных коробок передач основных фирм, занимающихся производством автоматических коробок передач.
По материалам сайта www.tahoe.ru
|
Более 2000 руководств |
||
Кинематические схемы 4-ступенчатой и 5-ступенчатой коробки-автомат
____________________________________________________________________________
Основные кинематические схемы
планетарных 4-ступенчатых АКПП с повышающей передачей
Жесткое условие повышения топливной экономичности транспортных средств
привело к требованию дополнения трехступенчатых коробок-автоматов
четвертой, повышающей, передачей.
Здесь разработчики пошли двумя путями: стали искать новые кинематические схемы с целью получения четвертой передачи и дополнили уже существующие трехступенчатые схемы дополнительным, так называемым, повышающим планетарным рядом.
Причем повышающий планетарный ряд устанавливается как перед основной коробкой передач, так и после нее. Принцип работы повышающего планетарного ряда во всех схемах одинаков.
Водило всегда должно быть соединено с входным валом, орбитальная шестерня — выходным, а солнечная шестерня остановлена.
Для управления планетарным рядом повышающей передачи АКПП используется, как правило, три элемента управления:
— муфта свободного хода, блокирующая солнечную шестерню и водило или водило и орбитальную шестерню
— блокировочная дисковая муфта, установленная между солнечной шестерней
и водилом; она используется при движении транспортного средства по
инерции или под уклон для обеспечения режима торможения двигателем,
когда муфта свободного хода не эффективна.
— дисковый или ленточный тормоз солнечной шестерни, включающий повышающую передачу.
Использование дополнительного планетарного ряда в схемах типа Simpson или со сцепленными сателлитами приводит к тому, что АКПП становится четырехстепенной, поэтому для включения передачи необходимо воздействовать на три элемента управления.
На первых трех передачах повышающий планетарный ряд редуктора коробки-автомат с помощью обгонной муфты или дисковой муфты заблокирован и его передаточное отношение равно 1. Все переключения происходят в основной части коробки передач.
Для получения четвертой повышающей передачи, блокировочная муфта дополнительного планетарного ряда автоматической коробки передач выключается, и включается тормоз солнечной шестерни, при этом обгонная муфта переходит в режим свободного хода. В основной же части коробки передач в это время включена прямая передача.
На первых порах производителей вполне устраивало такой способ получения
повышающей передачи. Конструкция АКПП изменялась незначительно, поэтому
первоначально все фирмы пошли именно по этому пути.
Конструкция АКПП изменялась незначительно, поэтому
первоначально все фирмы пошли именно по этому пути.
Однако, с технической и экономической точек зрения, подобное решение вряд ли можно считать удачным. Во-первых, неоправданно увеличено количество планетарных рядов, принесшее только лишь одну дополнительную передачу (повышающую), и, во-вторых, усложнилась система управления, поскольку помимо основной коробки передач, необходимо управлять еще и повышающим планетарным рядом.
Поэтому, естественно, следующим этапом был поиск более рациональных кинематических схем, позволяющих уйти от схем с четырьмя степенями свободы и использовать только два планетарных ряда.
В результате, практически всеми компаниями, занимающимися разработкой и
производством коробок-автоматов, были разработаны кинематические схемы
трехстепенных коробок передач, позволяющие реализовать четыре передачи
переднего хода (включая повышающую), используя только два планетарных
ряда.
Краткий обзор коробок автоматов различных производителей
АКПП Chrysler 41ТЕ (А604) / 42LE (А606)
АКПП Chrysler 41ТЕ (А604) / 42LE (А606) построены по одной и той же схеме и используются в автомобилях с приводом на передние колеса. Только 41ТЕ предназначена для поперечно расположенного двигателя, a 42LE для продольно расположенного двигателя.
В состав кинематической схемы входят два планетарных ряда, три блокировочные муфты и два тормоза.
Они позволяют реализовать четыре передачи переднего хода и одну передачу заднего хода. Отличительной особенность коробки-автомат Chrysler 41ТЕ (А604) / 42LE (А606) является то, что в них совсем не используются ленточные тормоза и обгонные муфты.
АКПП GMC-4L60-E
Кинематическая схема АКПП GMC-4L60-E состоит из двух планетарных рядов, трех блокировочных муфт, двух тормозов, один из которых ленточный, и двух муфт свободного хода.
Для обеспечения режима торможения двигателем на второй и третьей
передачах в АКПП GMC-4L60-E используется дополнительная блокировочная
муфта, установленная параллельно одной из муфт свободного хода.
АКПП FORD-AXOD-E (AX4S)
Схема АКПП FORD-AXOD-E (AX4S) построена с использованием двух планетарных рядов. Для управления коробкой передач используются две блокировочные муфты, три тормоза, два из которых ленточных, и две муфты свободного хода.
Муфта включения первой передачи и передачи заднего хода АКПП FORD-AXOD-E (AX4S) разделена на две части. Обе они соединяются со звеном через муфты свободного хода, имеющие противоположные направления действия.
Одна часть этой муфты коробки-автомат предназначена для передачи момента двигателя от входного вала на звено. Другая же ее часть используется для обеспечения режима торможения двигателем, когда момент передается со звена на входной вал.
АКПП Volkswagen 096, 097
АКПП Volkswagen 096, 097 построены по одной и той же схеме и
используются в транспортных средствах с приводом на передние колеса.
Трансмиссия 096 предназначена для использования с поперечно
расположенным двигателем, а 097 для продольно расположенного двигателя.![]()
Здесь использовано два планетарных ряда, один из которых построен по схеме со сцепленными сателлитами. Управление АКПП Volkswagen 096, 097 осуществляется с помощью трех блокировочных муфт, двух дисковых тормозов и одной муфты свободного хода.
Одна из блокировочных муфт позволяет соединять коробку автомат
Volkswagen 096, 097 непосредственно с коленчатым валом двигателя, минуя
трансформатор.
ЭЭто позволяет отказаться от использования блокировочной муфты
трансформатора и несколько упростить систему управления трансмиссией.
АКПП ZF 4HP18
Автоматические трансмиссии фирмы ZF устанавливаются на автомобилях BMW,
Alfa Romeo, некоторых моделях Audi, Jaguar, Lincoln, Peugeot, Porsche,
Rover, SAAB, Volvo и др.
Кинематическая схема АКПП ZF 4HP18, практически, повторяет
кинематическую схему трансмиссий 096 и 097. Для управления
автоматической коробкой передач использовано три блокировочных муфты,
два тормоза, один из которых ленточный, и две муфты свободного хода.
АКПП Mitsubishi F4A41/F4A51
АКПП Mitsubishi F4A41/F4A51 построены по одной и той же кинематической схеме, которая представляет собой несколько видоизмененную схему трансмиссий фирмы Chrysler 41 ТЕ и 42LE. Разработчики отказались от использования ленточных тормозов и муфт свободного хода.
Управление АКПП Mitsubishi F4A41/F4A51 осуществляется с помощью трех блокировочных муфт и двух дисковых тормозов. Они позволяют реализовать четыре передачи переднего хода и одну передачу заднего хода.
АКПП Aisin-Warner AW60-40
Эта компания, также как и ZF, занимается только проектированием и производством АКПП. В основном они устанавливаются на автомобили Toyota и некоторые модели Volvo, Opel и Suzuki.
В кинематической схеме АКПП Aisin-Warner AW60-40, так же как и во всех предыдущих, использовано два планетарных ряда.
Один из этих рядов автоматической коробки передач имеет сдвоенные
сателлиты, т. е. малое и большое центральные колеса соединяются не одним,
а двумя сателлитами. Для управления использованы три блокировочные
муфты, две муфты свободного хода и два тормоза, один из которых
ленточный.
е. малое и большое центральные колеса соединяются не одним,
а двумя сателлитами. Для управления использованы три блокировочные
муфты, две муфты свободного хода и два тормоза, один из которых
ленточный.
АКПП Nissan RE4F02/RE4F04
В состав кинематических схем АКПП Nissan RE4F02/RE4F04 входят два планетарных ряда, три блокировочные муфты, две муфты свободного хода и два тормоза, один из которых ленточный.
АКПП Mercedes 722.3/722.4
Кинематическая схема АКПП Mercedes 722.3/722.4 позволяет реализовать четыре передачи переднего хода и одну заднего хода. В отличие от всех предыдущих четырехступенчатых коробок передач, здесь реализовано три понижающих и одна прямая передача переднего хода.
Повышающей передачи в этих автоматических коробках передач нет. В схеме использовано три планетарных ряда, один из которых со сцепленными сателлитами.
Для управления автоматической коробкой передач Mercedes 722. 3/722.4
использовано две блокировочные муфты, одна муфта свободного хода, два
ленточных тормоза и один дисковый тормоз.
3/722.4
использовано две блокировочные муфты, одна муфта свободного хода, два
ленточных тормоза и один дисковый тормоз.
Для получения повышающей передачи разработчики дополнили кинематическую схему АКПП Mercedes 722.3/722.4 повышающим планетарным рядом, установив его после основной коробки передач. Эта модель АКПП получила номер 722.5.
Кинематические схемы пятиступенчатых планетарных коробок-автоматов
Стремление улучшить разгонные динамические качества автомобилей привело разработчиков АКПП к необходимости использования третьей понижающей передачи.
Таким образом, в середине 90-х годов автомобили некоторых компаний стали оснащаться пятиступенчатыми АКПП, в которых были реализованы три понижающих передачи переднего хода, прямая передача и повышающая передача.
Так компанией ZF были предложены два совершенно различных подхода
решения этой задачи. В кинематическую схему известной АКПП ZF 4HP18 был
добавлен дополнительный планетарный ряд, который, в отличие от
четырехступенчатых автоматических коробок передач, используется в
качестве понижающей передачи.
На первой второй и третьей передачах включен тормоз малого центрального колеса дополнительного ряда, поэтому его передаточное отношение больше 1.
Затем при включенной в основной коробке третьей передачи происходит выключение тормоза малого центрального колеса дополнительного ряда и включается блокировочная муфта этого ряда.
Таким образом, общее передаточное отношение коробки автомат становится равным 1. После этого в основной коробке включается уже повышающая передана. АКПП, построенная по такой схеме, получила индекс ZF 5HP18.
Кроме описанной схемы АКПП 5HP18, компания ZF разработала принципиально новую кинематическую схему планетарной коробки, реализующую пять передач переднего хода.
Эта АКПП получила номер ZF 5HP30. В ней использованы три планетарных ряда, три блокировочных муфты, две муфты свободного хода и три дисковых тормоза.
Эта автоматическая коробка передач относится к трехстепенным, и поэтому
для получения жесткой кинематической связи между входным и выходным
валами необходимо включить два элемента управления.
Компанией Mercedes так же была разработана оригинальная кинематическая схема коробки автомат, реализующей пять передач.
Она состоит из трех планетарных рядов, трех блокировочных муфт и четырех дисковых тормозов, которые позволяют реализовать пять передач переднего хода и две передачи заднего хода.
В отличие от ZF5HP30, эта автоматическая коробка передач относится к классу четырехстепенных, поэтому на каждой передаче должно быть включено три элемента управления.
Корпорация Chrysler так же не осталась в стороне от этого процесса, но пошла достаточно оригинальным путем. Для разработки АКПП 45RFE за основу была взята уже известная кинематическая схема автоматических коробок передач 41ТЕ и 42LE.
Для получения пятой передачи в автоматическую коробку передач были
добавлены планетарный ряд и тормоз. Но оригинальность заключается в том,
что пятая передача предназначена только для использования в режиме
принудительного понижения передачи 4-2 (kick down).
Это было сделано для уменьшения разницы скоростей движения автомобиля на четвертой и второй передачах. Разгон автомобиля происходит с помощью четырех передач, тех же самых, которые использованы в АКПП 41ТЕ и 42LE.
Для принудительного понижения передачи используется дополнительная пятая
передача (на плане угловых скоростей рабочая точка этой передачи
затемнена), передаточное отношение которой несколько меньше
передаточного отношения второй (разгонной) передачи.
____________________________________________________________________________
____________________________________________________________________________
- АКПП Ауди 09E
- Гидротрансформатор АКПП Ауди 09E
- Гидроблок Мехатроник Ауди 09E
- Компоненты АКПП Ауди-Фольксваген VW-Audi 01L, 01V
- Вариатор CVT 01J — фрикционы и планетарный механизм
- Гидросистема вариатора CVT 01J
- Механизмы переключения передач коробки-автомат Ауди 09L
- АКПП ZF 4HP20 / ZF 4HP16
- АКПП ZF 6HP19 / ZF 6HP21
- Механизмы переключения коробки-автомат ZF 6HP19 / ZF 6HP21
- Устранение неисправностей АКПП без снятия ее с двигателя
- Масляный фильтр АКПП и замена масла
- АКПП Митсубиси
- АКПП Aisin Warner 55-50SN
- АКПП Форд 4F27E
- АКПП Toyota Aisin U140E/U240E
- АКПП Мазда FN4A-EL
- Блок цилиндров и головка двигателей Тойота 3S-FE, 3S-GE
- ГРМ Тойота 3S-FE, 3S-GE
- Топливная система Тойота 3S-FE, 3S-GE
- Двигатели toyota 1AZ-FE и 2AZ-FE и их компоненты
- Блок управления и датчики двигателя toyota 1AZ-FE и 2AZ-FE
- Поршни, шатуны и коленвал 4A-FE, 5A-FE, 4A-GE, 7A-FE
- Проверка и регулировки двигателей Toyota 4A-FE, 5A-FE, 7A-FE и 4A-GE
- Разборка и сборка блока цилиндра Тойота 4A-GE, 4A-FE, 5A-FE, 7A-FE
- Ремень привода ГРМ Toyota 4A-GE
- Ремень привода ГРМ Тойота 4A-FE, 5A-FE, 7A-FE
- Система впрыска топлива 4A-FE, 4A-GE, 5A-FE и 7A-FE
- Замена цепи привода ГРМ Тойота 1ZZ-FE
- Блок и головка цилиндров 1ZZ-FE
- Замена ремня привода ГРМ Тойота 1G-FE
- Проверка и регулировка зазоров в клапанах двигателя 1JZ-GE/2JZ-GE
____________________________________________________________________________
____________________________________________________________________________
- Клапаны, распредвал и ГРМ 4G18/4G15 Мицубиси
- Топливная система и система охлаждения 4G15/4G18 Mitsubishi
- Замена ремня привода ГРМ Митсубиси 4G63
- Блок и головка цилиндров Mitsubishi 4G63
- Привод ГРМ двигателя 4G64/4G69
- Характеристика и регулировки Митсубиси 4М40
- Детали распредвала и ГРМ двигателя F15S3
- Детали блока цилиндров и головки блока двигателя F15S3
- Головка блока цилиндров и распредвалы F16D3, F16D4
- Компоненты системы управления двигателем F16D3, F16D4
- Датчики системы управления двигателем F14D4/F14D3
- Замена ремня привода ГРМ F14D4, F14D3
- Ремонт головки блока цилиндров и регулировка клапанов A15SMS
- Топливная система двигателя A15SMS
- Двигатель ЗМЗ-409
- Двигатель ЗМЗ-406
- Двигатель ЗМЗ-405
- Двигатель ЗМЗ-402
Как рассчитать переднюю кинематику робота за 5 простых шагов
Расчет прямой кинематики часто является первым шагом к использованию нового робота. Но как начать?
Но как начать?
Несмотря на то, что в Интернете доступно несколько хороших руководств, до сих пор не было простого пошагового руководства для расчета прямой кинематики.
Вот простое руководство по расчету кинематики любого робота-манипулятора.
[С тех пор, как я впервые опубликовал эту статью в 2015 году, она стала одной из наших самых популярных статей! С тех пор я обновил и улучшил его, но основная простота осталась прежней..]
Вычисление кинематики является краеугольным камнем для инженеров-робототехников. Но кинематика иногда может быть проблемой (например, понимание разницы между прямой и обратной кинематикой).
Когда я впервые начал заниматься исследованиями в области робототехники, мне часто говорили: «иди и посчитай переднюю кинематику этого робота». По сути, эта фраза является сокращением для исследования робототехники для «иди и познакомься с этим роботом».
Расчет прямой кинематики является жизненно важным первым шагом при использовании любого нового робота в исследованиях, особенно для манипуляторов.
Несмотря на то, что я изучил теорию кинематики в университете, только когда я рассчитал различные кинематические решения для нескольких реальных роботов, весь процесс стал интуитивно понятным. Даже тогда, поскольку я не рассчитывал кинематику каждый день, мне приходилось возвращаться к своим заметкам, чтобы напоминать себе, как это сделать, каждый раз, когда я сталкивался с новым роботом.
Было бы очень полезно иметь пошаговое руководство по этапам прохождения. Таким образом, мне не пришлось бы читать сотни страниц академически написанных уравнений в учебниках.
Было бы полезно что-то вроде «шпаргалки» по кинематике.
Этот пост как раз и есть шпаргалка.
В первую очередь я сосредоточусь на подходе Деванита-Хартенберга (DH) к прямой кинематике, поскольку он является наиболее распространенным.
Надеюсь, вам понравится!
Шаг 1: Возьмите карандаш и бумагу
При запуске нового робота может возникнуть соблазн сразу перейти к компьютеру.![]() Однако, даже если робот выглядит как «стандартный» манипулятор 6R (наиболее распространенный тип робота), я всегда сажусь с карандашом и бумагой, чтобы нарисовать кинематическую схему.
Однако, даже если робот выглядит как «стандартный» манипулятор 6R (наиболее распространенный тип робота), я всегда сажусь с карандашом и бумагой, чтобы нарисовать кинематическую схему.
Эта простая задача заставляет вас тщательно рассмотреть реальную физическую конфигурацию робота, избегая ложных предположений, которые могут нанести ущерб позже во время кодирования.
Существуют различные способы рисования кинематической цепи. Выберите любой стиль, который вы предпочитаете.
Я предпочитаю простые цилиндры для поворотных соединений и линии для звеньев, как показано на рисунке. Выполните поиск картинок в Google по запросу «кинематическая диаграмма» и просмотрите несколько доступных стилей.
Во время рисования определите, в каком направлении движется каждый сустав, и нарисуйте это движение в виде двусторонних стрелок на диаграмме.
Шаг 2: Нарисуйте оси
Следующим важным шагом является нанесение осей на каждый сустав. Подход DH назначает разные оси каждому подвижному суставу.
Если правильно настроить оси, работать с роботом будет легко. Настройте их неправильно, и вы будете страдать бесчисленными головными болями. Эти оси потребуются симуляторам, решателям обратной кинематики и вашим коллегам в вашей команде (никто не хочет решать решение прямой кинематики, если это уже сделал кто-то другой).
Посмотрите это видео, чтобы узнать, как их настроить:
Две важные оси для работы:
- Ось Z — Ось Z должна лежать на оси вращения вращательного шарнира или оси растяжения призматического шарнира.
- Ось X — Ось X должна лежать вдоль «общей нормали», которая является кратчайшей ортогональной линией между предыдущей осью Z и текущей осью Z (серьезно, смотрите видео).
- Ось Y — После того, как вы рассчитали две другие, эта ось должна встать на свои места, следуя «правилу правой руки» (см.
 ниже).
ниже).
Лично я рисую оси, используя следующую раскраску: ось z (синяя) , ось x (красная) и ось y (зеленая) . Кстати, это цветовая схема, которая используется в визуализаторе RViz от ROS, которую я широко использовал во время работы над диссертацией.
Еще когда я был студентом, наш лектор предложил нам сделать ось «скульптуру» из трех цветных соломинок, воткнутых в сферу синей гвозди, чтобы объяснить нам теорию. Хотя это может показаться немного «игровой школой», это может быть очень полезно, поскольку вы можете расположить скульптуру рядом с физическим роботом, чтобы убедиться, что оси указывают в правильном направлении. Чтобы получить виртуальную версию, воспользуйтесь этим интерактивным инструментом.
В качестве альтернативы вы можете использовать «правило правой руки».
Правило правой руки
Быстрый и простой способ запомнить направление оси Y — следовать правилу правой руки. Это мнемоника (помощь для запоминания), широко используемая в физике для запоминания ориентации трехмерной оси.
Чтобы использовать его, вытяните правую руку перед собой, вытянув большой, указательный и средний пальцы под углом 90 градусов друг к другу. Каждый палец соответствует оси:
- Большой палец = ось Z.
- Указательный палец = ось X.
- Средний палец = ось Y.
При направлении большого и указательного пальцев вдоль осей z и x шарнира робота, ваш средний палец естественным образом упадет в направлении оси y.
Шаг 3: Запомните свой концевой эффектор
Цель расчета прямой кинематики состоит в том, чтобы иметь возможность рассчитать положение конечного эффектора по положению суставов.
В большинстве учебных пособий по прямой кинематике конечный эффектор рассматривается как одно расстояние от конечного сустава. Это нормально для простого захвата «открыть-закрыть». Однако, поскольку современные захваты часто более сложны, стоит рассмотреть, как работает концевой эффектор.
Например, 3-пальцевый адаптивный захват Robotiq имеет несколько различных режимов захвата. Каждый режим будет соответствовать немного отличающемуся желаемому положению конечного эффектора. Если вы хотите зажать объект между его пальцами, для этого потребуется другое расстояние, чем если бы вы хотели обхватить объект пальцами.
При построении кинематической модели всегда следует тщательно учитывать концевой зажим.
Шаг 4: Расчет параметров DH
Параметры Denavit-Hartenberg (DH) часто требуются для ввода модели робота в симулятор и начала выполнения любого анализа на ней.
Лучший способ визуализировать параметры DH — посмотреть видео, которое я уже включил выше.
Параметры DH разбивают каждое соединение робота на четыре параметра, каждый из которых берется относительно предыдущего соединения. Они рассчитываются относительно «общей нормы», описанной выше. Обратите внимание, что если предыдущая ось z пересекает текущую ось z, что часто бывает, общая нормаль имеет нулевую длину.
- d — расстояние между предыдущей осью x и текущей осью x, по предыдущей оси z.
- θ — угол вокруг оси z между предыдущей осью x и текущей осью x.
- a (или r) — длина общей нормали, которая представляет собой расстояние между предыдущей осью z и текущей осью z
- α — угол вокруг общей нормали между предыдущей осью z и текущей осью z.
Просмотрите все соединения на чертеже и запишите параметры DH для каждого соединения. Каждое соединение должно иметь одно значение, которое является переменной, представляющей приводимое в действие соединение.
Для получения более подробного объяснения и некоторых примеров я рекомендую этот раздаточный материал Питера Корка или эту главу из Введение в робототехнику.
Альтернативы параметрам DH
Подход DH является наиболее распространенным подходом к прямой кинематике, но он не идеален.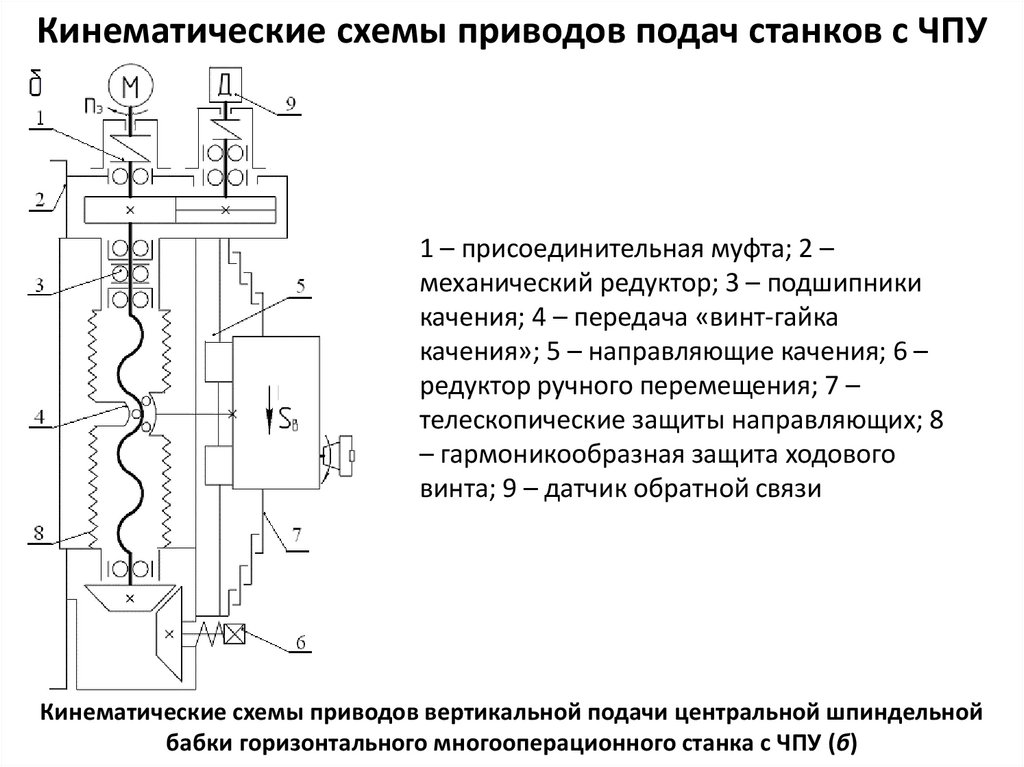 Одним из его недостатков является то, что он не очень элегантно обрабатывает параллельные оси Z. Существуют различные альтернативы, в том числе представления теории винтов, Hayati-Roberts и другие геометрические модели (см. эту статью для сравнения). Это могут (или не могут) быть лучшие подходы. Однако большинство кинематических библиотек принимают параметры DH, и по этой причине это разумный подход для начала.
Одним из его недостатков является то, что он не очень элегантно обрабатывает параллельные оси Z. Существуют различные альтернативы, в том числе представления теории винтов, Hayati-Roberts и другие геометрические модели (см. эту статью для сравнения). Это могут (или не могут) быть лучшие подходы. Однако большинство кинематических библиотек принимают параметры DH, и по этой причине это разумный подход для начала.
Шаг 5. Объедините параметры в робота целиком
Последний шаг — объедините все параметры DH в робота целиком. Есть два способа сделать это, сложный и простой:
Трудный путь: Создайте свой собственный решатель
«Первый» метод использования параметров DH состоит в том, чтобы «свернуть свой собственный» решатель Forward Kinematic, используя ваш любимый язык программирования. Я сам использовал этот подход в прошлом, хотя, вероятно, в наши дни я бы не стал этого делать.
Когда у вас есть параметры DH для каждого соединения, вы можете использовать этот метод, чтобы закодировать его в решатель прямой кинематики:
- Найдите библиотеку на вашем языке программирования, которая позволяет выполнять матричное умножение.
 Кроме того, напишите свой собственный код, используя методы из этого списка.
Кроме того, напишите свой собственный код, используя методы из этого списка. - Для каждого соединения робота заполните новую матрицу 4 x 4 следующими значениями:
- Перемножьте все матрицы вместе, начиная с первого сустава и заканчивая концевым эффектором.
- Окончательный вектор T будет содержать положение концевого эффектора. Матрица R будет содержать ориентацию концевого зажима.
Если вы просто хотите попробовать это с некоторыми значениями, не кодируя свой собственный решатель, вы можете использовать этот удобный онлайн-инструмент, чтобы создать рабочий пример полного робота из его параметров DH.
По моему опыту, создание собственного решателя не дает больше преимуществ, чем использование существующей библиотеки. Тем не менее, это хорошее упражнение для обучения.
Простой способ: используйте существующие библиотеки
Гораздо более эффективный способ расчета прямой кинематики, если у вас есть параметры DH, заключается в использовании существующей библиотеки.
Существует множество кинематических программных библиотек, и многие из них делают гораздо больше, чем просто рассчитывают прямую кинематику. Большинство из них включают в себя решатели обратной кинематики, динамику, визуализацию, планирование движения и обнаружение столкновений, и это лишь некоторые из функций. Эти библиотеки преобразуют ваши параметры DH в матрицы, которые затем перемножаются, чтобы рассчитать взаимосвязь между положениями суставов и положением конечного эффектора.
Некоторые хорошие библиотеки для разработки включают Robotics Library, Orocos Kinematics and Dynamics Library, ROS MoveIt, OpenRave, RoboAnalyzer и Matlab Robotics Toolbox.
Несмотря на то, что для фактического управления роботом обычно требуется инверсная кинематика, расчет прямой кинематики является необходимым шагом для знакомства с любой новой роботизированной рукой.
Если вы нашли эту статью полезной, обязательно добавьте ее в закладки, чтобы вы могли найти ее, когда в следующий раз столкнетесь с новым роботом!
Какой ваш любимый метод изучения кинематики нового робота? Вы предпочитаете другой метод параметрам DH? У вас есть вопросы по реализации Forward Kinematics в вашем роботе? Расскажите нам в комментариях ниже или присоединяйтесь к обсуждению в LinkedIn, Twitter или Facebook.
Страница не найдена | Институт науки и технологий Сатьябама (считается университетом)
Наш веб-сайт был обновлен, а пункты меню изменены. Пожалуйста, посетите нашу ДОМАШНЮЮ СТРАНИЦУ [www.sathyabama.ac.in]
К сожалению, страница, которую вы ищете, не найдена
Перейти на домашнюю страницу
Имя
Адрес электронной почты
Мобильный номер
Город
Курсы
— Выберите — Курсы бакалавриата (UG) Инженерные курсы (BE / B.Tech / B.Arch / B.Des)BE — Информатика и инженерияB.E — Информатика и инженерия со специализацией в области искусственного интеллектаB.E — Информатика и инженерия со специализацией в Интернете вещейB.E — Информатика и инженерия со специализацией в области науки о данныхB. E — Информатика и инженерия со специализацией в области искусственного интеллекта и робототехникиB.E — Информатика и инженерия со специализацией в области искусственного интеллекта и машин ОбучениеB.E — Информатика и инженерия со специализацией в технологии блокчейнB.E — Информатика и инженерия со специализацией в области кибербезопасностиB.E — Электротехника и электроникаB.E — Электроника и инженерия связиB.E — МашиностроениеB.E — Автомобильная инженерияB .E — МехатроникаB.E — Авиационная инженерияB.E — Гражданское строительствоB.Tech — Информационные технологииB.Tech — Химическая инженерияB.Tech — БиотехнологияB.Tech — Биомедицинская инженерияB.Arch — Бакалавр архитектурыB.Des. — Бакалавр курсов DesignEngineering (BE / B.Tech) — Неполный рабочий деньB.E — Информатика и инженерияB.E — Электротехника и электроникаB.E — Электроника и техника связиB.E — МашиностроениеB.E — Гражданское строительствоB.Tech — Химическая промышленность Курсы инженерного искусства и наукиB.B.A. — Бакалавр делового администрирования B.
E — Информатика и инженерия со специализацией в области искусственного интеллекта и робототехникиB.E — Информатика и инженерия со специализацией в области искусственного интеллекта и машин ОбучениеB.E — Информатика и инженерия со специализацией в технологии блокчейнB.E — Информатика и инженерия со специализацией в области кибербезопасностиB.E — Электротехника и электроникаB.E — Электроника и инженерия связиB.E — МашиностроениеB.E — Автомобильная инженерияB .E — МехатроникаB.E — Авиационная инженерияB.E — Гражданское строительствоB.Tech — Информационные технологииB.Tech — Химическая инженерияB.Tech — БиотехнологияB.Tech — Биомедицинская инженерияB.Arch — Бакалавр архитектурыB.Des. — Бакалавр курсов DesignEngineering (BE / B.Tech) — Неполный рабочий деньB.E — Информатика и инженерияB.E — Электротехника и электроникаB.E — Электроника и техника связиB.E — МашиностроениеB.E — Гражданское строительствоB.Tech — Химическая промышленность Курсы инженерного искусства и наукиB.B.A. — Бакалавр делового администрирования B. Com. — Бакалавр коммерцииB.Com. — Финансовый учетB.Sc. — Визуальная коммуникацияB.Sc — Медицинская лаборатория технологийB.Sc — Клиника и питание и диетологияB.Sc. — ФизикаB.Sc. — ХимияB.Sc. — ИнформатикаB.Sc. — МатематикаB.Sc. — БиохимияB.Sc. — Дизайн одеждыB.Sc. — Бакалавр биотехнологий. — Бакалавр микробиологии. — ПсихологияБ.А. — АнглийскийB.Sc. — Биоинформатика и наука о данных, бакалавр наук — Информатика, специализация в области искусственного интеллекта, бакалавр наук. — Бакалавр наук в области сестринского дела B.Sc. — Курсы авиационного праваB.A. бакалавр права (с отличием) BBA бакалавр права (с отличием) B.Com.LL.B. (с отличием) LL.B.Курсы фармацевтикиB.Pharm., Бакалавр фармацииD.Pharm., Диплом фармацевтаПоследипломное образование(PG)Инженерные курсыM.E. Информатика и инженерияМ.Е. Прикладная электроникаМ.Е. Компьютерное проектированиеМ.Е. Строительная инженерияМ.Е. Силовая электроника и промышленные приводыM.Tech. БиотехнологияM.Tech. Медицинское оборудованиеM.Tech. Встроенные системы и IoTM.
Com. — Бакалавр коммерцииB.Com. — Финансовый учетB.Sc. — Визуальная коммуникацияB.Sc — Медицинская лаборатория технологийB.Sc — Клиника и питание и диетологияB.Sc. — ФизикаB.Sc. — ХимияB.Sc. — ИнформатикаB.Sc. — МатематикаB.Sc. — БиохимияB.Sc. — Дизайн одеждыB.Sc. — Бакалавр биотехнологий. — Бакалавр микробиологии. — ПсихологияБ.А. — АнглийскийB.Sc. — Биоинформатика и наука о данных, бакалавр наук — Информатика, специализация в области искусственного интеллекта, бакалавр наук. — Бакалавр наук в области сестринского дела B.Sc. — Курсы авиационного праваB.A. бакалавр права (с отличием) BBA бакалавр права (с отличием) B.Com.LL.B. (с отличием) LL.B.Курсы фармацевтикиB.Pharm., Бакалавр фармацииD.Pharm., Диплом фармацевтаПоследипломное образование(PG)Инженерные курсыM.E. Информатика и инженерияМ.Е. Прикладная электроникаМ.Е. Компьютерное проектированиеМ.Е. Строительная инженерияМ.Е. Силовая электроника и промышленные приводыM.Tech. БиотехнологияM.Tech. Медицинское оборудованиеM.Tech. Встроенные системы и IoTM.