
Подготовка к работе и управление электровозом
Подготовка к работе
Перед запуском электровоза следует убедиться в том, что на всех секциях электровоза:
— рубильники «Батарея» SA10 находятся во включенном положении. Не включенные рубильники включить, если известна причина их выключения;
— приборы питания и управления (ППУ) А4 находятся в рабочем состоянии (см. раздел 4.8). Не включенные исправные ППУ включить, если известна причина их выключения;
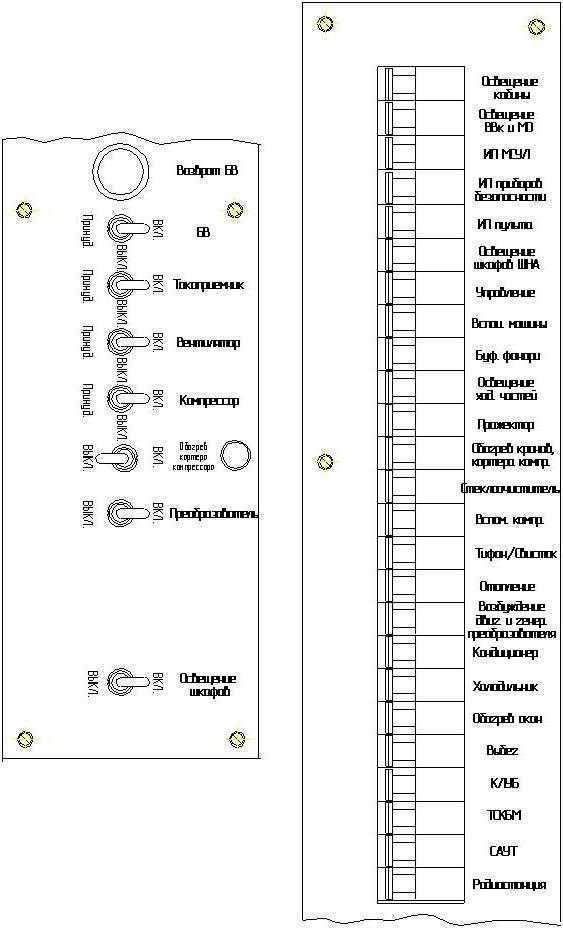
— выключатели автоматические и тумблера на панели ШНА №4 находятся во включенном положениях (см. рис. 82), кроме тумблеров «Обогрев картера компр.» и «Освещения шкафов»;
— источники электропитания ИП-ЛЭ (три) включены. Не включенные исправные ИП-ЛЭ включить, если известна причина отключения;
— переключатели Q1 находятся в выключенном положении, замыкающим розетки ввода под низким напряжением на землю;
— сетчатые шторы и двери высоковольтных камер закрыты и заблокированы разъединителем QS2;
— люки крыш закрыты;
— ручки разобщительных кранов установлены в рабочее положение в соответствии со схемой принципиальной пневматической.
В секции из кабины, которой будет осуществляться управление электровозом:
— вставить и провернуть ключ устройства блокировки тормозов АБТ;
вставить и провернуть ключ в переключателе «Управление» на ПУ-Эл;
— включить быстродействующие выключатели и запустить компрессоры и мотор-вентиляторы;
— включить радиостанцию;
— включить КЛУБ-У, САУТ-ЦМ/485 и ТСКБМ.
После установки переключателя «Управление» во включенное положение убедится о готовности МСУЛ к работе. На экране БИ-МСУЛ должно появиться столько столбцов, сколько секций сцеплено в электровоз, а на мониторе не должно появиться сообщение о неготовности МСУЛ к работе.
Если в пневматической цепи управления давление сжатого воздуха не ниже 0,4 МПа, то поднять токоприемники нажатием нужных кнопок «Токоприемники» (см. также раздел 3.4). Опробовать тормоза и подачу песка. Втавить ключ в переключатель «Реверсор» и провернуть его в нужную сторону. В ночное время необходимо включить прожектор и буферные фонари в соответствии с требованиями Инструкции по сигнализации.
В зимний период при минусовой температуре перед запуском компрессоров установить тумблер «Обогрев картера компр.» каждой секции в положение «ВКЛ», при этом загорится красным цветом светодиод. Запуск компрессора можно осуществить только в положении тумблера «Обогрев картера компр.» в положении «ВЫКЛ». Включить обогрев кранов нажатием кнопки «Обогрев кранов» на ПУ-Эл. Включить отопление кабины.
В случае отсутствия на электровозе запаса сжатого воздуха подъем токоприемника осуществляется от вспомогательных компрессоров. Для этого после нажатия кнопки (кнопок) «Токоприемники» нажать и удерживать кнопку «ВСПОМОГАТ. КОМПРЕССОР» на ПУ-Эл до тех пор, пока токоприемник не поднимется. После подъема токоприемника сразу же запускают компрессоры. Для предотвращения опускания токоприемника следует кнопку «ВСПОМОГАТ. КОМПРЕССОР» отпустить тогда, когда давление сжатого воздуха в главных резервуарах достигнет 0,4…0,5 МПа.
Отпустить ручные тормоза и убрать башмаки из-под колесных пар.
Управление электровозом
Управление электровозом (кроме маневровой работы) осуществляется при включенных исправных КЛУБ-У, САУТ-ЦМ/485 и ТСКБМ. Порядок включения и управление электровозом под контролем КЛУБ-У описан в разделе 6.1, САУТ-ЦМ/485К – в разделе 6.2, ТСКБМ – в разделе 6.3.Управление в режиме тяги. Переключатель «РЕЖИМ» устанавливают в положение «ТЯГА». Разгон электровоза осуществляют набором позиций джойстиком «ТЯГА», устанавливая его либо в положение «+А» (автоматический набор) либо в положение «+1» (ручной набор). Для набора последующей позиции при ручном наборе джойстик следует устанавливать в центральное положение. Начало движения производится на последовательном соединении тяговых электродвигателей (1…20 позиции), разгон и дальнейшее движение – на последовательно-параллельном (21…35 позиции) и параллельном соединениях тяговых двигателей (36…50 позиции).
Прежде чем перейти на автоматический набор следует произвести ручной набор трех (или более) позиций.
Параметры процессов отображаются на блоке БИ-МСУЛ. Срабатывание электрических аппаратов электровоза и элементов защиты отображается на мониторе МСУЛ, а наиболее ответственная информация дублируется голосовым сообщением через динамик САУТ. На ходовых позициях (20, 35, 50) возможно применение режима ослабления возбуждения (ослабление поля).
Информация о выводимых на БИ-МСУЛ и монитор сообщениях, а также перечень используемых речевых сообщений приведены в «МСУЛ-А. Руководство по эксплуатации 04Б.00.00.00 РЭ».
При каждой установке джойстика в положение «-1» происходит переход на одну позицию вниз. При каждой установки джойстика в положение «-А» производится перевод схемы на одно соединений тяговых электродвигателей ниже (с «П» на «СП», с «СП» на «С», с «С» на «Выбег»).
После нажатия кнопки «Выбег» по истечении времени ~1 с производится разбор схемы тягового режима.
Управление электровозом при маневровой работе производится через ПУ-МСУЛ.Управление в режиме электрического торможения. Переключатель «Режим» устанавливают в одно из положений торможения («П» или «СП» или «ФС»). После запуска преобразователя кратковременной установкой джойстика «Ток возбуждения» в положения «+ОВ» происходит включение электрического торможения (на БИ-МСУЛ в строке «Уставка МГ» индицируется уставка 10%). При этом МСУЛ, в зависимости от скорости движения и напряжения в контактной сети, выбирает схему силовых соединений (реостатная или рекуперация на «СП» соединении ТД или рекуперация на «П» соединении ТД) и производит вход в режим электрического торможения в состоянии минимально устойчивого тормозного усилия.
Далее тормозное усилие задается установкой джойстика «Ток возбуждения» в положение «+ОВ» или «-ОВ» если переключатель «Режим» находится в положении «П» или «СП». Тормозное усилие регулируется МСУЛ если переключатель «Режим» находится в положении «ФС», при этом поддерживается скорость движения равная скорости предшествующей установке переключателя «Режим» в положение «ФС».
Для задания тормозного усилия величина тока уставки может принимать значения 0, 10, 11, 12…100% темпом 20% в секунду. При выключенной противобоксовочной защите ток уставки ограничивается до 70%. При возникновении боксования или юза колесных пар тормозное усилие в данной секции (секциях) автоматически понижается, а после прекращения боксования или юза восстанавливается.
Допускается, не дожидаясь входа в режим электрического торможения установить требуемое тормозное усилие.
Переход с реостатного торможения на рекуперативное «СП» соединения, а также переход с «П» соединения на «СП» соединение можно выполнит при условии если вследствие падения скорости движения или увеличения напряжения в контактной сети ток возбуждения превысил 450 А и происходит снижение тормозного усилия. Для этого:
— переключатель «Режим» установить в положение «СП»;
— уменьшить тормозное усилие до уставки 0 установкой джойстика «Ток возбуждения» в положение «-ОВ» или нажатием кнопки «Выбег»;
— вновь задать тормозное усилие установкой джойстика «Ток возбуждения» в положение «+ОВ».
Переход с «СП» соединения на «П» соединение можно выполнить при условии если вследствие увеличения скорости движения ток в якорях ТД превысил 450 А и происходит снижение тормозного усилия. Для этого:
— переключатель «Режим» установить в положение «П»;
— уменьшить тормозное усилие до уставки 0 установкой джойстика «Ток возбуждения» в положение «-ОВ» или нажатием кнопки «Выбег»;
— вновь задать тормозное усилие установкой джойстика «Ток возбуждения» в положение «+ОВ».
Переход с «СП» соединения в реостатное торможение производится автоматически.
МСУЛ может ограничивать тормозное усилие, особенно при высоком значении уставки в зависимости от:
— величины тока возбуждения;
— величины тока якоря;
— соотношения тока якоря и тока возбуждения;
— величины напряжения в контактной сети.
В случае повышения напряжения в контактной сети более 3800В при рекуперации МСУЛ переводит схему в режим реостатного торможения соответствующего позиции 1 реостатного торможения. Если напряжение продолжает расти, МСУЛ снижает тормозное усилие.
При реостатном торможении для поддержания оптимального режима переключение ступеней пуско реостатных резисторов выполняется автоматически.
Выключение режима электрического торможения производится уменьшением тормозного усилия до уставки 0. Выключение преобразователя установкой переключателя «Режим»в положение «Тяга».
Управление режимом тяги при наличии поврежденных ТД. Поврежденный тяговый электродвигатель (электродвигатели) можно отключить установкой соответствующего переключателя «Отключение тяговых двигателей» в положения «1-2» или «3-4» или «ОТКЛ». При отключении всех тяговых двигателей на ведущей («Головная») секции следует переназначить эту секцию на «Прицепная» установкой тумблера «1» «Режимы работы секций» в положение «Прицепная». На последовательно-параллельном соединении секция с неисправным тяговым электродвигателем полностью выводится из работы.
Аварийные ситуации с отключением БВ, вспомогательных машин индицируются на БИ-МСУЛ или мониторе красным цветом с указанием отключаемого элемента и секции. Кроме того, на БИ-МСУЛ выводится информация по признакам: боксование осей 1-4, повышенное или пониженное напряжение контактной сети, перегрузка тяговых двигателей.
Внимание! Работа секции с неработающим мотор-вентилятором категорически запрещается. Запрещается собирать схему «С» соединения ТД при неработающем мотор-вентиляторе в любой секции электровоза.
studfiles.net
Управление электровозом — Как устроена ЖД
Железная дорога — Как устроена ЖД
При приёмке электровоза вначале производят его осмотр. Тщательно осматривают ходовые части электровоза, тяговые электродвигатели, вспомогательные машины и электрическую аппаратуру. Особое внимание уделяют состоянию пантографа и его накладок. После осмотра необходимо проверить наличие смазки, инструмента, противопожарных и сигнальных устройств.
Для подъёма пантографа нужно вставить ключ в кнопочный щиток, находящийся в кабине упраления, и нажать кнопки “пантографы” и “передний пантограф” или “задний пантограф”. Если давление в пневматической системе электровоза недостаточно для подъёма пантографа, то необходимо отключить резервуар пантографа от остальной пневматической системы и с помщью ручного насоса поднять давление в цилиндре пантографа до необходимой для подъёма пантографа величины. Подъём пантографа контролируется по показанию вольтметра контактной сети. Далее включаются компрессоры и вентиляторы.
Пуск в ход электровоза начинается установкой главной рукоятки контроллера машиниста на первую позицию при предварительной установке реверсивной рукоятки в положение “вперёд” или “назад”. На первой позициии главная рукоятка задерживается в течение 3-4 сек для срабатывания всех электрических аппаратов. Ток тягового двигателя, показываемый амперметром, должен быть равен примерно 100 ампер. Затем рукоятка контроллера переводится в следующие позиции.
Скорость перемещения рукоятки контроллера определяется общим сопротивлением движению поезда (вес поезда, состояние рельсов, величина подъёма и т.д.) При быстром перемещении рукоятки с позиции на позицию ток в цепи двигателей будет быстро увеличиватся и может достигнуть такой величины, при которой начинается буксование электрвоза. Это произойдёт в том случае, если сила тяги электровоза превысит силу сцепления. При слишком медленном перемещении рукоятки контроллера пуск будет происходить медленно и пусковые сопротивления чрезмерно перегреются.
Длительное движение электровоза постоянного тока возможно на позициях главной рукоятки, нозываемых ходовыми (безреостатными). Пусковые сопроивления на этих позициях замкнуты накоротко и ток по ним не проходит. На остальных позициях, называемых реостатными, длительная езда не допускается, так как это может привести к недопустимому перегреву и выходу из строя пусковых сопротивлений.
В процессе разгона электровоза следят по амперметру за током тягового двигателя, поддерживая его максимальную величину по возможности постоянной. При ведении тяжеловесного состава пуск электровоза производитсая при больших токах, не допуская, однако, его бускования. Для повышения сцепления используют песок, который в современных электровозах подаётся автоматически.
Увеличение скорости движения электровоза на ходовых позициях возможно с помощью ослабления поля тяговых двигателей. Для ослабления поля тяговых двигателей соответствующая рукоятка контроллера машиниста устанвливается в положение первой ступени ослабления поля. Ток тяговых двигателей при этом увеличивается, а скорость движения электровоза повышается, вызывая уменьшение тока. При снижении тока возможно применение второй и последующих ступеней ослабления поля. Переход на ослабленное поле производят так, чтобы бросок тока не превысил определённой для данного вопроса величины.
Если увеличиватьскорость поезда не требуется, машинист может установить рукоятку контроллера в нулевое положение, и поезд будет двигатся по инерции при отключённых тяговых двигателях. В процессе движения не допускается превышение конструкционнной скорости электровоза.
Добавить комментарий
poezdon.ru
Как управлять поездом «Сапсан». Пособие для чайников
А вы знаете, что «Сапсаном» управляет только один машинист? И что будет, если машинисту станет плохо или ему надо будет отойти по нужде? И какой минимальный набор кнопок и рычагов нужен, чтобы управлять поездом?

Все это и много чего еще я узнал и попробовал в деле в учебном центре РЖД. Полное название — Санкт-Петербургский центр подготовки персонала по обслуживанию высокоскоростных поездов. Центр расположен по адресу набережная Обводного канала 70, а точнее где-то дальше этого дома, через дворы. Вот так выглядит здание центра:
2.
В самом большом помещении здания стоят два тренажера-симулятора разных поездов: «Сапсана» и «Ласточки».
3.
Самое заметное отличие этих тренажеров (кроме того, что они симулируют разные поезда) — это наличие у «Сапсана» пневматических подвесов, которые способны двигать кабину в разные стороны и с разной интенсивностью. Таким образом, кабина симулятора может создавать иллюзию всех передвижений поезда: трогание с места, ускорение, плавная езда, перестроение на другие пути, торможение.
4.
Например, при резком торможении кабина тоже резко наклоняется вперед, это очень хорошо ощущается в кабине тоже. Или проезд стрелок с перестроением на соседние пути, которое ощущается как визуально, так и вестибулярным аппаратом. Во время работы тренажера запрещается заходить за полосатую линию желто-черного цвета, по понятной причине 🙂
5.
Слева от тренажера «Сапсана» стоит вот эта милая конструкция, которую так и хочется забрать к себе домой. Это, между прочим, тоже тренажер. На нем проводники оттачивают правильную реакцию и порядок действий в нештатных ситуациях с поездами, например, расстановку сигнальных огней и заграждений:
6.
Правда же классно?
7.
В этом же помещении есть возможность посмотреть, как выглядит токоприемник «Сапсана» вблизи. Сотрудники центра включили пневматику, которая поднимает токоприемник. Происходит это довольно тихо и плавно, только воздух свистит. Кстати, в России есть участки железных дорог с разным типом напряжения — с переменным или постоянным. У токоприемника «Сапсана» два контакта под разные типы напряжения. Электроникой поезда предусмотрена защита от неверного выбора контакта. Есть еще один любопытный нюанс, связанный с этой частью поезда: электрические провода для электровозов прокладывают так, чтобы они были натянуты не прямо, а под углом. Это позволяет контактам токоприемников изнашиваться более-менее равномерно.
8.
Но вернемся к тренажеру «Сапсана». Мои коллеги — Сережа и Леша — полезли в кабину первыми. Я понаблюдал за движениями кабины извне, а потом переместился вот сюда.
9.
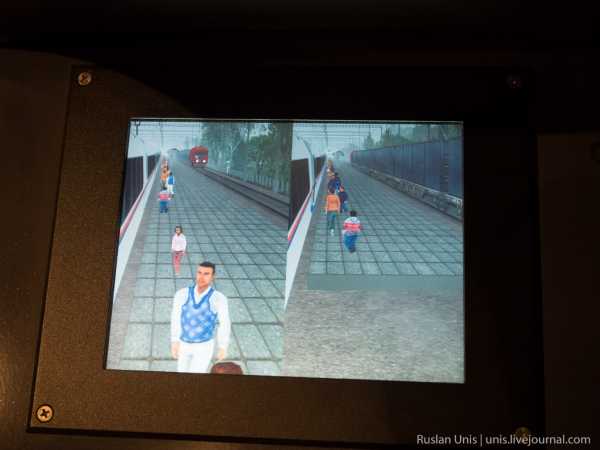
Это рабочее место инструктора по обучению. Во время демонстрации тренажера инструктор находился с нами в кабине. Но во время обучения сотрудников РЖД он сидит за этим рабочим местом и общается со слушателями по громкой связи, для этого на столе выведен пульт с микрофоном. На левом мониторе видно все те показатели, которые видит «машинист» в кабине тренажера плюс живую трансляцию изображения с камеры в кабине. На правом мониторе выведен интерфейс управляющей программы тренажера, на котором можно запускать и останавливать симуляцию, а также задавать различные условия для обучающихся. Например, можно задать погоду, время суток, дать команду на симуляцию поломки или экстренных ситуаций.
10.
Левый монитор поближе:
11.
Вот пришла очередь меня и Сергея сесть в кресло машиниста. В ассортименте органов управления «Сапсана» царит здоровый минимализм. Особенно сильно это бросается в глаза после того, как я попробовал в действии похожий симулятор самолета Boeing-737NG, который мы тестировали месяцем ранее.
12.
Вот фотография кабины того самолетного симулятора, для того, чтобы ощутить масштабы:
13.
К чему я вспомнил самолетный симулятор? Вам может показаться, что для новичка управлять самолетом будет интереснее, чем поездом. Однако мне так не показалось. Дело в том, что в управлении самолетом есть миллион нюансов. Ну может не миллион, то очень много. Чтобы поднять самолет в воздух или посадить его, нужно проделать очень много действий с уймой разных ручек, кнопок и тумблеров. А с поездом ситуация значительно проще. Электровозом современного поезда можно управлять всего двумя рычагами: тягой и тормозом. Видите посадку Сергея на фотографии ниже? Под обоими руками на панели управления как раз эти два рычага:
14.
Рычаг с надписью «Тяга» служит для того, чтобы начать движение поезда и разогнать его до необходимой скорости. На фотографии ниже рычаг в нулевой позиции — тяги нет, и поезд не поедет. Стоит только дернуть рычаг от себя, и поезд, при соблюдении определенных условий, тронется с места и начнет очень плавно разгоняться. Рычаг тяги имеет две первые фиксированные позиции, а дальше двигается плавно без фиксации. Чтобы сдвинуть рычаг с нулевой позиции, нужно нажать на черный наконечник, который убирает фиксатор. Это защита от случайного включения тяги во время стоянки на станции или в депо.
15.
Под правой рукой расположен рычаг тормоза. На фотографии ниже рычаг в состоянии отпущенных тормозов. Чтобы включить торможение, надо нажать на наконечник рычага и сдвигать рычаг на себя. Как выбрать нужное положение рычага? Это зависит от необходимой интенсивности торможения. Если нужно затормозить плавно, то достаточно поставить рычаг в положение 2Т или 3Т. Если же необходимо экстренное торможение, то сдвигаем рычаг до упора вниз.
16.
По правую руку, в боковой консоли управления, есть большая и заметная кнопка аварийного стоп-крана. Это еще один способ экстренного торможения, только при таком способе, вместе с резким замедлением, включаются еще и два громких звуковых сигнала электровоза. Такой способ торможения применяется, например, когда машинист заметил на путях нечто, угрожающее безопасности движения состава:
17.
Наверняка вы заметили третий рычаг, слева от того, что управляет тягой. Это рычаг задания скорости электровоза. Своего рода круиз-контроль, только более умный, умеющий менять скорость движения в зависимости от ситуации на путях. Над рычагом задания скорости есть переключатель направления движения: вперед или назад. Чтобы переключить направление движения нужно затормозить поезд до полной остановки.
На экранах отображается уйма всякой информации, которую, впрочем, тоже можно понять и запомнить за довольно короткое время. Самая важная цифра ровно посередине — скорость передвижения. Электроника способна сама определять разрешенную скорость на данном участке и предупреждать машинистов о превышении скорости передвижения. Система может смотреть вперед на много километров, чтобы машинист мог прогнозировать скорость передвижения, ведь поезд — не автомобиль, он не может так динамично разгоняться и тормозить.
18.
А теперь мы плавно подошли к теме человеческого фактора. Дело в том, что Сапсаном всегда управляет только один машинист. В поезде также есть бортмеханик, но в его функции не входит управление поездом. Машинист не может отлучиться из кабины во время рейса. На вопрос о необходимости пойти в туалет был ответ «4 часа в пути — это немного, они пойдут до рейса или после». А что случится с поездом, если машинисту станет плохо и он не сможет контролировать состав? Ну, во-первых, машинисты проходят и регулярные строгие медосмотры, в том числе перед каждым рейсом. Это уже исключает приличную долю вероятности критически плохого самочувствия машиниста. Во-вторых, безопасность поезда и его пассажиров обеспечивает умная электроника. Машинист перед рейсом обязан надеть на руку специальный браслет, который следит за его пульсом. Как только у системы возникли подозрения, что машинист отвлекся от управления, она подает звуковой сигнал и дублирует его визуальным на мониторе. После этого сигнала машинисту необходимо нажать большую оранжевую кнопку, которая прячется под панелью справа. На фотографии ниже виден кусок этой кнопки. Если машинист после двух сигналов не отреагирует и не нажмет эту кнопку, то система автоматически применит экстренное торможение. То же самое происходит, если поезд едет с превышением разрешенной скорости на участке. Система сначала подаст сигналы предупреждения о превышении, и если реакции не будет — включится экстренное торможение.
19.
На экранах отображается различная служебная информация. Скорость передвижения, скоростные лимиты, расстояние до целей и светофоров, уровень тяги и тормозного усиления, напряжение в контактном проводе, состояние дверей, статус ошибок и прочие данные. Устройство черного цвета с трубкой и экранчиком — радиостанция для связи со станциями и персоналом, обслуживающим пути. Еще у «Сапсана» есть некое подобие «черного ящика», как в самолетах. Туда пишутся все показатели и действия, которые происходят во время управления поездом.
20.
Не все органы управления расчитаны под руки. В полу встроены две педали. Только это не тяга и тормоз, как может показаться на первый взгляд. Назначение этих педалей может показаться странным. Левая квадратная педаль служит для рассыпания песка под колеса поезда. Это один из способов увеличить сцепление колес с рельсами в морозные зимы. Если на тренажере включить зиму, то нажатие этой педали при разгоне существенно увеличивает набор скорости, и пневматические подвесы под кабиной ощутимо реагируют на это действие. А правая круглая педаль включает подачу двойного звукового сигнала: тифон+свисток.
21.
У поездов тоже есть светофоры. Их предназначение отличается от тех, что стоят на перекрестках для автомобилей, но их объединяет одно свойство — нарушение правил следования сигналов грозит наказанием, о чем красноречиво гласит надпись на стене слева от машиниста.
22.
Справа, на том же месте, другая надпись, напоминающая о том, что максимальная разрешенная скорость движения поезда на всем участке — 250 км/ч.
23.
Под левой рукой расположены кнопки открывания и закрывания дверей в вагонах. Тренажер позволяет симулировать посадку/высадку пассажиров на станции. Для того, чтобы присматривать за людьми во время посадки/высадки, в поезд встроены камеры, изображение с которых выведены на монитор над кнопками дверей. Монитор может показывать картинку с камер также и во время движения поезда.
24.
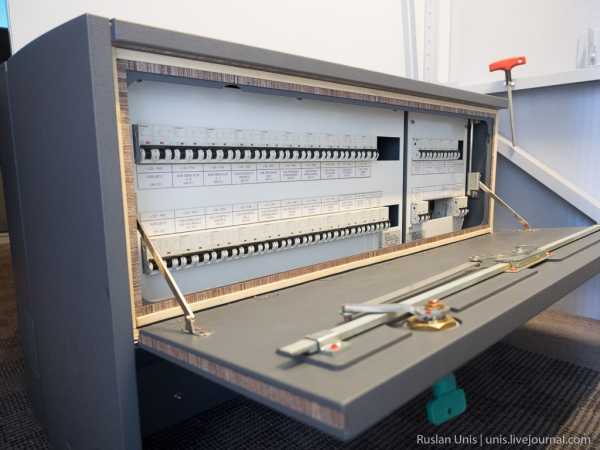
Вот, пожалуй, и все, что нужно знать для управления поездом. Самое сложное в Сапсане, если не считать нештатных ситуаций, это привести поезд к состоянию готовности к движению. То есть, «завести» электровоз :). А дальше все очень просто. Рычаг тормоза в крайнее верхнее положение, рычаг тяги тоже до упора вверх, и поехали. Слишком быстро или нужно замедлить ускорение — уменьшаем тягу. Нужно плавно замедлиться — убираем тягу и дергаем рычаг тормоза примерно до середины. Нужно замедлиться очень резко — дергаем тормоз до упора и тормозим экстренно. Только если захочется тронутся после экстренного торможения, то надо дождаться готовности тормозной системы к работе, и запустить тягу через «ноль» (выключив тягу полностью и включив ее снова). Остальные кнопки подписаны по-русски, назначение некоторых интуитивно понятно. Но, чтобы не разрушать иллюзию простоты управления поездом, не лезьте в блок выключателей, отвечающих за отдельные функции поезда 🙂
25.
Попутно покажу несколько фотографий тренажера поезда «Ласточка». Его управляющий пульт расположен рядом с самим тренажером, а не в соседней комнате, как у «Сапсана»:
26.
На первый взгляд разница в кабинах между Сапсаном и Ласточкой не особо большая. Бросается в глаза то, что здесь больше пространства по ширине:
27.
А что касается органов управления, то у Ласточки и вовсе один рычаг для тяги и торможения:
28.
Хотя отдельный рычаг для тормоза тоже есть:
29.
В остальном принцип управления мало чем отличается от «Сапсана»:
30.
31.
Чтобы увидеть кабину тренажера в действии, предлагаю посмотреть видео, снятое коллегой:
Интересно? Теперь можете стучаться к машинисту «Сапсана» и говорить, что вы тоже умеете управлять поездом! Шучу, вас туда просто не пустят 🙂 Если у вас возникли вопросы о поездах — задавайте, я их переадресую специалистам учебного центра.
kak-eto-sdelano.ru
1. Введение
УПРАВЛЕНИЕ ЭЛЕКТРОВОЗОМ
Электровоз 2ЭС6 имеет два режима работы силовой схемы:
«Независимое возбуждение» (НВ)— основной режим работы электровоза на всех соединениях тяговых электродвигателей (ТЭД) с автоматическим регулированием тока возбуждения ТЭД статическими преобразователями (СТПР-1 для 1-2-го ТЭД и СТПР-2 для 3-4-го ТЭД). В случае неисправности СТПР (входит в состав ПСН), он может быть отключен соответствующим переключателемQR, после чего эксплуатация электровоза возможна на 6 двигателях в режиме «НВ» (с отключением соответствующей пары ТЭД), либо в режиме «Последовательное возбуждение».
«Последовательное возбуждение» (ПВ)– является дополнительным режимом работы электровоза. В режиме «ПВ» возможна работа электровоза только в режиме тяги на всех соединениях ТЭД (на ходовых позициях не предусмотрено дополнительных позиций ослабления возбуждения). В связи с тем, что полная реализация Переход на аварийный режим управления производится в случае отказа РН3000 (входит в состав ПСН) или при выходе из строя СТПР, когда отключение ТЭД производить нецелесообразно.
Управление силовой схемой ТЭД производится с помощью следующих органов управления:
«Реверсор» — изменение направления движения;
Джойстик «Тяга» — выбор соединения ТЭД и набор позиций в ручном режиме;
Джойстик ”Задатчик силы” – переключение режимов «Тяга-Торможение», задание требуемого тягово-тормозного усилия и набора позиций в автоматическом режиме. В режиме «ПВ» джойстик ”Задатчик силы” не используется;
Кнопка «Выбег» — выключение ТЭД (Выбег) из любого режима;
Переключатель «Фиксация скорости» (ФС) — при движении на ходовых позициях тягового режима или при электрическом торможении задает режим поддержания скорости.
Управление электровозом при маневровой работе может производиться через ПУ-
МСУЛ при помощи двух кнопок: «Выбег» и «+1» для последовательного набора позиций.
Для контроля за режимами работы силовой схемы электровоза на мониторы
выводится информация:
Действующее значение токов якорей и обмоток возбуждения ТЭД;
Соединение ТЭД: последовательное соединение «С», последовательно-параллельное соединение «СП» и параллельное соединение «П»;
Режим движения: режим тяги «Тяга», режим рекуперативного торможения «Рекуперация» и режим реостатного торможения «ЭДТ»;
Номер позиции: в тяговом режиме 1…65, в режиме рекуперации 0…1 и в режиме реостатного торможения 1…27;
Заданное значение силы: в тяговом режиме 1…150, в тормозном режиме -1…-100 (от ограничения по сцеплению). В случае ручного набора позиций при независимом возбуждении этот индикатор отображает действующую силу тяги. В режиме последовательного возбуждения индикатор не используется.
На БИ-МСУЛ выводится следующая информация:
Действующее значение токов якорей и обмоток возбуждения ТЭД;
Режим «Тяга» или «Торможение»;
Номер позиции;
Боксование или юз осей 1…4;
Перегрузка ТЭД.
2. Особенности характеристик электровоза с тэд независимого возбуждения
В режиме тяги электровоза с двигателями последовательного возбуждения для каждого значения скорости на каждом из соединении ТЭД имеется несколько фиксированных значений силы тяги. Изменение силы тяги возможно лишь ступенями при переходе с полного поля в режим ослабленного поля и наоборот. Для получения силы тяги величиной менее чем при полном поле на каком–либо соединении необходимо менять группировку ТЭД, т.е. осуществлять переход с параллельного соединения («П») на сериес-параллельное («СП») и с «СП» на последовательное соединение («С»).
На электровозах с независимым возбуждением тяговых двигателей возможно плавное изменение силы тяги.
studfiles.net
Автоматизация управления электровозами — Студопедия.Нет
Введение
Рельсовый транспорт на шахте является наиболее распространенным.несмотря на свойственные ему недостатки прерывность, большое разнообразие и территориальная разбросанность технологических операций и механизмов. Например, в состав технологии рельсового транспорта входят такие операции как погрузка и разгрузка вагонеток, электровозная откатка аккумуляторными или контактными электровозами, канатные откатки но наклонным выработкам, обмен вагонеток в клетях, откатка вагонеток в надшахтных зданиях. Для управления этими технологическими процессами требуется большой объем и разнообразие средств автоматизации. Основные задачи систем управления на рельсовом транспорте: повышение пропускной способности транспорта; уменьшение числа обслуживающего персонала, облегчение его труда, контроль безошибочности его действий; повышение безопасности и безаварийности транспорта, выдача технологической и технико-экономической информации о состоянии транспорта.
Автоматизация погрузочных пунктов
Основными задачами автоматизации погрузочных пунктов является снижение простоев работы, сокращение времени на маневры составов и ручные операции, повышение качества загрузки вагонеток, уменьшение численности обслуживающего персонала.
По сроку службы различают переносные, полустационарные и стационарные погрузочные пункты. Переносные погрузочные пункты устанавливают на откаточных штреках в местах сопряжения с лавой и выполняют по однопутной тупиковой схеме с отстающей разминовкой или двухпутной схеме с симметричной разминовкой. Полустационарные погрузочные пункты сооружают на срок службы несколько месяцев по двухпутной схеме с симметричной разминовкой. Стационарные погрузочные пункты со сроком службы более двух лет сооружают на главных откаточных выработках по двухпутной технологической схеме с загрузкой из аккумулирующей емкости.
Автоматизация погрузочных пункт»» должна предусматривать управление такими технологическими операциями: загрузка вагонеток с конвейера или аккумулирующего бункера, перемещение состава в процессе загрузки вагонетки и при смене вагонеток, перекрытие меж вагонеточного пространства при смене вагонеток, пылеподавление, уплотнение угля в вагонетке (при необходимости), контроль степени загрузки вагонетки и точности ее установки. При этом должно обеспечиваться автоматическое выполнение заданной последовательности технологических операций, необходимые защиты и блокировки.
Автоматизированные комплексы погрузочных пунктов КАП служат для загрузки составов шахтных вагонеток и секционных поездов. В состав комплекса входит масло станция, гидравлический толкатель 3, перекрыватель 5межвагонеточного пространства с гидравлическим приводом /, датчики контроля заполнения вагонетки ДПЗ и датчики положения вагонетки ДП1, ДП2 с рабочим органом 2 под загрузочным устройством.
Гидравлический толкатель 3 состоит из рамы, двух ползунов с курками, двух гидроцилиндров, крана управления гидророспределителя. Во время работы начинается попеременная работа гидроприводов. При Сдвижении штока гидроцилиндра вагонетка захватывается кулакомтолкателя и проталкивается. Когда шток достигнет своего крайнего положения (выдвинут до упора), шток второго цилиндра втянется внутрь до предела и своим выступающим упором повернет пробку крана управления. При этом происходит переключение потока жидкости из одного цилиндра в другой и изменяется направление движения кулаков.
В процессе загрузки вагонетки датчик заполнения контролирует уровень загрузки вагонетки. При подъеме конуса угля створки датчика поднимаются вверх и воздействуют через трехходовой кран на подачу жидкости в гидроцилиндр толкателя для проталкивания вагонетки. Насыпанный конус угля уходит из зоны датчика, створки его опускаются, трехходовой кран перекрывается и останавливает толкатель на время насыпки следующего конуса угля и т. д.
После заполнения последнего конуса угля в вагонетке срабатывает рабочий орган 2 датчиков положения вагонетки (в виде отклоняющихся штифтов) и включается гидропривод 1 на поворот загрузочного лотка для направления потока угля в порожнюю вагонетку. Одновременно гидротолкатель перемещает состав вперед для занятия новой порожней вагонеткой исходного положения для погрузки. Сигнал об исходном положении выдает рабочий орган 2 гидродатчиков ДП1, ДП2, толкатель останавливается, загрузочный лоток перебрасывается в прежнее рабочее положение, начинается засыпка первого конуса угля и цикл загрузки вагонетки повторяется.
В электрическую схему комплекса входят контактные датчики положения вагонетки. Датчик ДП1 контролирует приход первой порожней вагонетки в зону толкателя и включает красный огонь светофора 4, запрещающий машинисту дальнейшую подачу состава. Датчики ДП2 и ДП1 при отсутствии вагонеток в их зоне выдают сигнал на прекращение работы погрузочного пункта и включают зеленый сигнал светофора. Датчик ДПЗ контролирует пересып вагонетки. Датчик ДП4 выдает сигнал на запрет работы погрузочного пункта, чтобы предупредить выход первой груженой вагонетки состава за пределы разминовки. Датчик ДП5 выдает запрет на работы при заходе электровоза в зону разминовки погрузочного пункта. Сигнал от датчика ДП6 используется для счета вагонеток при погрузке.
Автоматизация управления электровозами
Контактные электровозы угольных шахт в настоящее время оборудуют электродвигателями постоянного тока при ступенчатом регулировании тока двигателя с помощью контроллера. Автоматизируют такие электровозы в основном в двух направлениях: создание и совершенствование систем дистанционного управления локомотивами и систем автоматизации управления некоторыми основными операциями режима работы привода.
Дистанционное управление контактными электровозами, используют в местах погрузки и разгрузки составов, его осуществляет машинист с вынесенного из кабины поста управления.
К основным операциям, выполняемым автоматически, относят такие, как: плавность трогания с места и разгон без буксования, регулирование скорости движения в зависимости от веса состава и состояния пути, эффективное торможение, контроль состояния электропривода и посылка сигналов в систему управления транспортом о режимах работы электровоза, месте его положения и состоянии его узлов.
При дистанционном управлении электровозом для обеспечения безопасности участок контактного провода, на котором производится это управление, изолируют от остальной части контактной сети. Схема, показанная на (рис.4), предусматривает установку магнитных станций на электровозе и в пункте погрузки или разгрузки. Электровоз с участка контактной сети 1, проходя по инерции изоляционную вставку 2, останавливается на обесточенном участке 3. Машинист, установив контроллер в одно из начальных положений, выходит из кабины к посту дистанционного управления. Для движения электровоза вперед он нажимает и удерживает кнопкуS1. При этом контактор К1 срабатывая, подает напряжение на изолированный участок от основной контактной сети. Затем на станции электровоза срабатывает контактор К3, через контакты которого подается питание на обмотки возбужденияL1, L2 и якоряM1, MS приводных двигателей. Электровоз будет двигаться со скоростью, определяемой сопротивлением резистора R включенного контроллером в якорную цепь двигателей. При отпускании машинистом кнопкиS1электровоз останавливается.
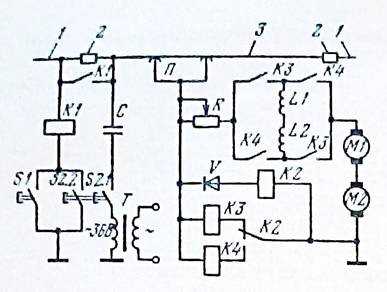
(Рис.4) Принципиальная схема дистанционного управления электровозом
Для движения электровоза назад машинист нажимает кнопку S2, которой вначале замыкается контактS2.1 в цепи трансформатора Т9 а затем контактS2.2 в цепи контактораK1 При этом реле К2 включается по цепи: корпус (земля) обмотки трансформатора Т — корпус электровоза — обмотка реле К2 — диод V — токосъемник П — конденсатор С — контактS2.1 — обмотка трансформатора Т. Реле К2 переключающим контактом подготавливает к включению контактор К4. При замыкании контактаS2.2 контактор /С/, включившись, подает питание на изолированный участок и контакторK4, сработав, вызывает изменение направления тока в цепи обмоток L1,L2 двигателей, и электровоз будет двигаться в обратном направлении до момента отпускания машинистом кнопкиS2. Существенный недостаток управления по данной схеме — недостаточная плавность трогания состава с места. Для его устранения применяют автоматическое управление основными операциями работы двигателя электровозов.
Автоматизируют управление двигателями электровозов при ступенчатом или плавном изменении управляющего параметра. Этот параметр — сопротивление пускового (тормозного) реостата при реостатном управлении и напряжение источника тока — при безреостатном. Для управления (включения — выключения) реостатом используют контакторы или контроллеры с электромагнитным электромеханическим или электропневматическим приводом. Для плавного регулирования тока в обмотках возбуждения, а следовательно, и частоты вращения приводных двигателей в настоящее время широко применяют бесконтактные тиристорные схемы.
Наиболее совершенен экспериментальный комплекс автоматизированного управления шахтными поездами СТАРТ-1, в состав которого входят:
Аппаратура пункта управления, содержащая пульт управления, мнемосхему, устройство расшифровки сигналов и устройство разделения цепей,
аппаратура сигнализации и блокировки путевого участка, состоящая из путевых датчиков, светофоров, блока блокировки маршрутов, устройства задания и блокировки маршрутов;
аппаратура обмена информацией между электровозом и путевыми устройствами автоматики;
аппаратура автоматического управления аккумуляторным электровозом.
Технические средства комплекса СТАРТ-1 обеспечивают: дистанционное управление электровозом на погрузочных пунктах, при котором машинист выполняет функции оператора погрузки;
централизованное управление движением поездов, при котором оператор пункта управления задает и контролирует маршруты движения, а электровозами управляют машинисты в соответствии с сигналами светофоров;
автоматизированное управление электровозом, при котором машинист устанавливает задание по скорости и наблюдает за работой, а все другие операции по управлению выполняются автоматически;
автоматическое управление движением поездов без машинистов в магистральных выработках и дистанционное в местах погрузки; при этом задание и контроль маршрутов выполняет оператор пункта управления;
автоматическое управление движением поездов без машинистов, но в комплексе с управляющей электронной машиной; при этом задача управления электровозным транспортом перерастает в более сложную задачу управления грузопотоком и для своего решения требует большой объем информации, в частности, о динамике работы добычных участков;
путевую сигнализацию и блокировку на стрелках путевых участков; при этом маршрут движения по участку задает машинист электровоза, а установка маршрута, блокировочные зависимости и разделение маршрута после прохода поезда осуществляются автоматически;
централизованный контроль местонахождения поезда в откаточных выработках; при этом используют устройства контроля занятости участка пути (по одному на участрк) и мнемосхему путевого развития с устройством расшифровки сигналов на пункте управления;
централизованный контроль местонахождения поездов в сочетании с путевой сигнализацией и блокировкой с использованием аппаратуры, применяемой при централизованном контроле местонахождения, путевой сигнализации и блокировок.
При использовании комплекса СТАРТ-1 предусматривают передачу четырех команд скоростей на электровоз и двух команд (наличие электровоза на участке и исправность аппаратуры) сэлектровоза. При неправильной команде или ее отсутствии электровоз выполняет команду «Стоп». При этом для передачи сигналов команд использована высокочастотная (телемеханическая) система в диапазоне частот 50—150 кГц по линии индуктивной связи.
studopedia.net
Как управляют поездом

У автомобиля есть рулевое колесо, или попросту руль, которым водитель крутит, когда надо свернуть в сторону. А у поездов нет руля, потому что они двигаются по стальным рельсам. Зато на краю поездного колеса – с внутренней его стороны – есть выступ. Эти выступы и удерживают поезд на рельсах. Получается так, что сами рельсы рулят поездом, а водителя, который на железной дороге называется машинистом, этого делать не надо. Но управлять движением своего состава он все равно должен. И если за него это делают приборы, то машинист должен следить за их работой.
Поезда идут туда, куда ведут их рельсы.

Выступы на ободах поездных колес удерживают и локомотивы, и вагоны на рельсах.

Когда поезд подходит к развилке, железнодорожная стрелка направляет его в нужную колею.
Заглянем в кабину машиниста.

Рычажки, расположенные спереди от машиниста, управляют скоростью: один из них – чтобы разгоняться, другой – чтобы тормозить.
С левой стороны находится рычаг для разгона. Когда машинист поворачивает его, поезд трогается и набирает скорость.
Если надо уменьшить скорость или остановиться, машинист поворачивает на себя тормозной рычаг, который находится справа.
Это интересно:
Когда управляют автомобилем, то выбирают нужную скорость и нужное направление движения. Главное отличие в управлении поездом от управления автомобилем состоит в том, что в поезде надо выбирать лишь скорость. И еще: тормозами и скоростью в поезде управляют не ногами, а руками. Обычно в электропоездах машинист левой рукой работает с рукояткой, которая позволяет увеличивать или уменьшать скорость состава. А правую руку он держит на рукоятке тормоза. Однако в последних моделях электропоездов все чаще встречается схема, когда одной рукояткой управляют и скоростью и тормозами. Маленьким детям иногда кажется, что машинист еще и рулит этими рукоятками. Чтобы правильно понять принцип действия рукояток управления – посмотрите в ванной или на кухне, как управляют краном с водой. Вы поворачиваете там ручку в одну или другую сторону, и вода начинает литься сильнее или слабее, или совсем останавливаться. Но в сторону не поворачивает.
Похожие материалы
wheels-wings.com
Как управлять паровозом — ilipin
Рассказывает машинист паровоза серии «Л» (ласково называемый Лебедянка):
Рассказывать весь техпроцесс подготовки машины к движению машинист и его помощник не стали, вдруг все насмотрятся этого вашего ютуба и угонят ценную и историческую технику! Однако удалось выведать несколько фактов:
— За день работы по развозу детей и взрослых паровоз тратит примерно полтонны угля. Уголь береться на ведомственных котельных РЖД.
— Конструкционная скорость — 80 км/ч, от фактов превышения машинист с помощником отказываются )
— Базируется паровоз Л-4172 на станции Пермь-2, в тепловозном депо с поворотным кругом
— В будущем году Свердловская железная обещает восстановить еще один паровоз серии ФД, их будет два! Скрестим пальцы чтобы все получилось.
На 5-39 вы можете видеть Наталью klyaksina. Ее отчет с места события.
Те, кто еще не видел паровоз вблизи и даже изнутри — успевайте, вот расписание его появления на станциях Пермского края:
9 мая на станции Пермь II (с 12:00 до 19:00)
10 мая в Кунгуре (с 10:00 до 18:00)
11 мая в Лёвшино (с 10:00 до 17:00)
12 мая на станции Чусовская (с 12:00 до 18:00)
13 мая в Кизеле (с 12:00 до 16:00)
14 мая в Березниках (с 12:00 до 18:00).
Фотореп паровоза на станции Чайковская прилагается:
Паровозный тупик на ст. Чайковская, водой и углем сейчас здесь не заправиться.

Вход в кабину
Ходовая часть и смазана и накрашена.

Стимпанк, самый настоящий.

Машинист паровоза (в обычной жизни и работе — тепловоза) Григорий

Шипков Анатолий Семенович, кочегар с 1949г., помощник машиниста и затем машинист паровоза не мог не проехать на своей технике.
Паровоз, вид сбоку.

Прибытие поезда на ст. Чайковская.
ilipin.livejournal.com