
Значение, Определение, Предложения . Что такое дифференциальный привод
- Онлайн-переводчик
- Грамматика
- Видео уроки
- Учебники
- Лексика
- Специалистам
- Английский для туристов
- Рефераты
- Тесты
- Диалоги
- Английские словари
- Статьи
- Биографии
- Обратная связь
- О проекте
Примеры
Значение слова «ДИФФЕРЕНЦИАЛЬНЫЙ»
Неодинаковый при разных условиях.
Смотреть все значения слова ДИФФЕРЕНЦИАЛЬНЫЙ
Значение слова «ПРИВОД»
Механизм для передачи вращательного движения от одного места к другому.
Смотреть все значения слова ПРИВОД
Предложения с «дифференциальный привод»
| Другие результаты | |
Но что интересно в ней, почему все ждут ее очень охотно, у неё дифференциал повышенного трения и задний привод. | |
Новые функции включали ABS и полный привод на четыре колеса с электрически блокирующимися дифференциалами. | |
Рыскание регулируется точной регулировкой дифференциала в трансмиссии привода ротора. | |
SS4-II позволяет водителю зафиксировать центральный дифференциал для максимального крутящего момента привода на плохих поверхностях. | |
В дифференциальном анализаторе выход одного интегратора приводил к входу следующего интегратора, или выходу графического представления. | |
Однако установка дифференциальной тяги приводила к тому, что мощность двигателя с левой стороны была немного выше, чем с правой. | |
Каждый двигатель имел свою собственную первичную коробку передач, обе из которых приводились в один дифференциал. | |
В отличие от подшипников с жидкостной смазкой, газовая смазка должна рассматриваться как сжимаемая, что приводит к решению нелинейного дифференциального уравнения. | |
При критической толщине эта деформация индуцирует изменение знака химического потенциала, то есть отрицательный дифференциал μ, что приводит к переключению в режим роста. | |
При использовании таким образом дифференциал соединяет продольный входной карданный вал с шестерней, которая, в свою очередь, приводит в движение поперечную кольцевую шестерню дифференциала. | |
Дифференциальная скорость заряженных частиц приводит к возникновению тока, в то время как массовая зависимость скорости дрейфа может привести к химическому разделению. | |
Это приводит к линейному дифференциальному уравнению. | |
В этом более позднем случае интегрирование приведенного выше дифференциального уравнения приводит к постоянному члену для тока, который представляет собой фиксированное смещение постоянного тока, протекающее через индуктор. | |
Анализ переходных процессов KVL и KCL в цепях, содержащих элементы накопления энергии, приводит к дифференциалу. | |
Анализ переходных процессов L и для исследования цепей, содержащих элементы накопления энергии, приводит к дифференциальным результатам. | |
С небольшим количеством алгебры и отбрасыванием членов порядка dt2 это приводит к дифференциальному уравнению. | |
На заднеприводных автомобилях дифференциал может соединяться с полуосями внутри корпуса моста или с приводными валами, которые соединяются с задними ведущими колесами. | |
Этот тип передачи наиболее распространен в приводных поездах автомобилей, в сочетании с дифференциалом. | |
Модели с двойным приводом двойные двигатели также имеют открытый дифференциал на передних осях. | |
Дифференциальные усилители чувств работают, приводя свои выходы к противоположным крайностям, основанным на относительных напряжениях на парах битовых линий. | |
Дифференциальные уравнения в частных производных решаются сначала дискретизацией уравнения, приводя его в конечномерное подпространство. | |
Учитывая, что дифференциальные уравнения не всегда приводят к однозначным решениям, этот метод не может гарантировать получение однозначного решения. | |
Многие задачи естественным образом приводят к соотношениям между величиной и скоростью ее изменения, и они изучаются как дифференциальные уравнения. | |



На данной странице приводится толкование (значение) фразы / выражения «дифференциальный привод», а также синонимы, антонимы и предложения, при наличии их в нашей базе данных. Мы стремимся сделать толковый словарь English-Grammar.Biz, в том числе и толкование фразы / выражения «дифференциальный привод», максимально корректным и информативным. Если у вас есть предложения или замечания по поводу корректности определения «дифференциальный привод», просим написать нам в разделе «Обратная связь».
Дифференциальный привод
Авторы патента:
Щепин В.Д.
Кудрявцев И.А.
Садовин С. Н.
Н.
F16h4/72 — с вторичным приводом, например с регулирующим двигателем для непрерывного изменения скорости
Изобретение относится к машиностроению, в частности к приводам. Дифференциальный привод содержит по меньшей мере два приводных двигателя и по меньшей мере одну волновую дифференциальную передачу. Волновая передача содержит генератор волн, гибкое и подвижное жесткое колеса и выходное звено. Один из приводных двигателей взаимодействует с внутренним зубчатым венцом генератора волн при помощи паразитных шестерен. Подвижное жесткое зубчатое колесо связано с выходным звеном непосредственно. Другой приводной двигатель соединен с гибким колесом волновой передачи посредством зубчатой муфты. Технический результат — обеспечение широкого диапазона регулирования скорости выходного звена за счет суммирования или вычитания угловых скоростей вращения приводных двигателей, сокращение времени переходных процессов при пуске, торможении и реверсировании двигателей. 1 ил.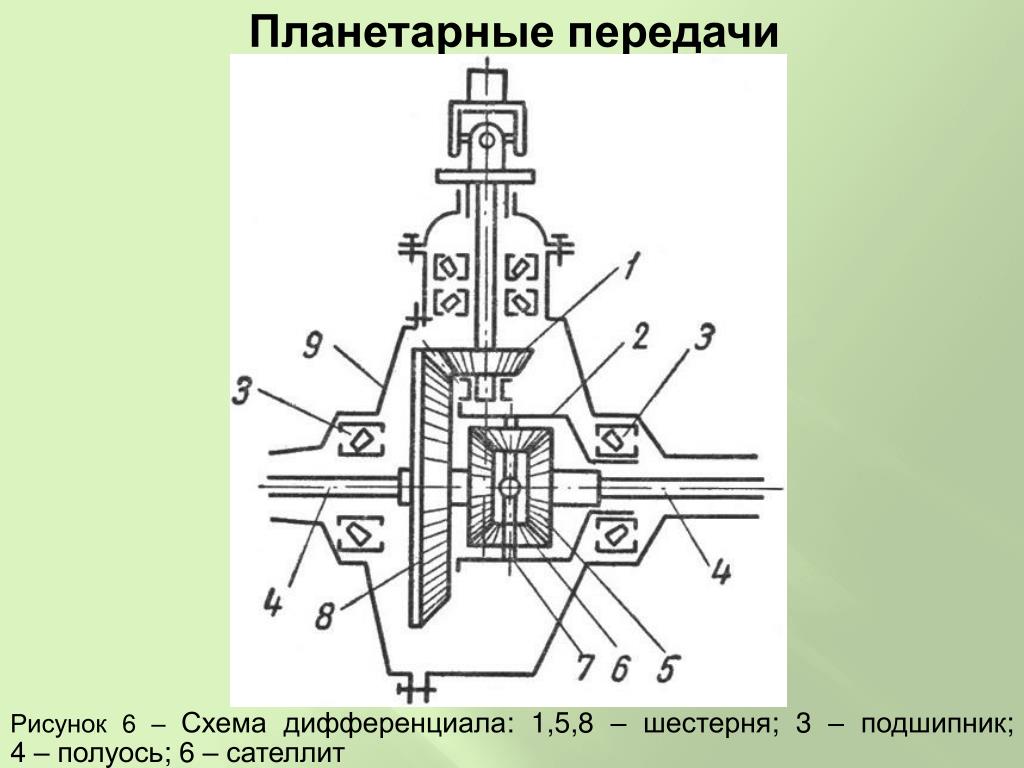
Изобретение относится к области машиностроения, в частности к приводам.
Известен дифференциальный привод, содержащий два двигателя, две дифференциальные передачи, связанные зубчатые передачами, и корпус. Дифференциальные передачи выполнены планетарными (Волков Д. П., Крайнев А. Ф. Трансмиссии строительных и дорожных машин. — М.: Машиностроение, 1974, с. 311, рис. 105 ж).
Недостатками известного привода являются невысокие точностные характеристики и значительные габаритные размеры, обусловленные использованием обычных цилиндрических зубчатых передач.
Известен также дифференциальный привод (Крайнев А. Ф. Словарь-справочник по механизмам, 1987, с. 55, рис. н), содержащий два параллельно расположенных двигателя, приводной вал одного из которых связан с генератором волн волновой передачи, взаимодействующим с гибким зубчатым колесом, жестко связанным с выходным звеном, а приводной вал другого находится в зацеплении с наружным зубчатым венцом жесткого колеса при помощи цилиндрической шестерни. Генератор волн выполнен в виде двух радиально разнесенных роликов.
Генератор волн выполнен в виде двух радиально разнесенных роликов.
Недостатками известного устройства являются значительные габаритные размеры, сложность конструкции и невысокие динамические показатели работы, связанные с вращением значительных инерционных масс, находящихся на приводном валу одного из двигателей.
Это устраняется тем, что дифференциальный привод содержит по меньшей мере два приводных двигателя, выходные валы которых имеют возможность сцепления с корпусом привода посредством электромагнитных тормозов, по меньшей мере одну волновую дифференциальную передачу, содержащую дисковый генератор волн, гибкое и жесткое зубчатые колеса, и выходное звено, выполненное в виде зубчатого венца с наружным зацеплением. При этом один из приводных двигателей взаимодействует с внутренним зубчатым венцом генератора волн при помощи паразитных шестерен, жесткое зубчатое колесо связано с выходным эвеном непосредственно, а другой приводной двигатель соединен с гибким колесом волновой передачи посредством зубчатой муфты.
Новым отличительным существенным признаком в заявленном изобретении в сравнении с прототипом является то, что один из приводных двигателей взаимодействует с внутренним зубчатым венцом генератора волн при помощи паразитных шестерен, жесткое зубчатое колесо связано с выходным звеном непосредственно, а другой приводной двигатель соединен с гибким колесом волновой передачи посредством зубчатой муфты.
Сущность изобретения поясняется чертежом, на котором изображена кинематическая схема привода.
Привод состоит из двух кинематически связанных приводных двигателей 1 и 2, выходные валы которых имеют возможность сцепления с корпусом 3 привода посредством электромагнитных тормозов 4 и 5. На выходном валу приводного двигателя 1 крепится шестерня 6, которая находится в зацеплении с паразитными шестернями 7, установленными на осях 8 подвижно. Паразитные шестерни 7 в свою очередь сцеплены с внутренним зубчатым венцом дискового генератора волн 9. На генераторе волн 9 расположено гибкое колесо 10 волновой дифференциальной передачи, а с ним кинематически связано жесткое зубчатое колесо 11, соединенное непосредственно с выходным звеном 12 привода. На выходном валу приводного двигателя 2 закреплена зубчатая муфта 13, находящаяся в зацеплении с гибким колесом 10. Выходные валы приводных двигателей 1 и 2 расположены в корпусе 3 привода соосно.
На генераторе волн 9 расположено гибкое колесо 10 волновой дифференциальной передачи, а с ним кинематически связано жесткое зубчатое колесо 11, соединенное непосредственно с выходным звеном 12 привода. На выходном валу приводного двигателя 2 закреплена зубчатая муфта 13, находящаяся в зацеплении с гибким колесом 10. Выходные валы приводных двигателей 1 и 2 расположены в корпусе 3 привода соосно.
Привод работает следующим образом.
Для получения ускоренного вращения выходного звена 12 привода включается двигатель 2 и вместе с ним электромагнитный тормоз 5, который расцепляет зубчатую муфту 13 с корпусом 3. Вращение от приводного двигателя 2 передается через зубчатую муфту 13 гибкому колесу 10, которое обкатывается вокруг заторможенного дискового генератора волн 9 и приводит в движение жесткое зубчатое колесо 11. Таким образом крутящий момент с передаточным отношением дифференциальной волновой передачи передается от двигателя 2 выходному звену 12, связанному с жестким зубчатым колесом 11.
В случае работы дифференциального привода в замедленном режиме необходимо отключение приводного двигателя 2 и электромагнитного тормоза 5 и включение приводного двигателя 1 с электромагнитным тормозом 4, который расцепляет шестерню 6 с корпусом 3 привода. Вращение от приводного двигателя 1 передается через паразитные шестерни 7, установленные подвижно на осях 8, внутреннему зубчатому венцу дискового генератора волн 9, который заставляет деформироваться гибкое зубчатое колесо 10. При этом зубчатая муфта остается неподвижной так, как она заторможена электромагнитным тормозом 5. Деформация гибкого колеса 10 преобразуется во вращение жесткого зубчатого 11 и связанного с ним выходного звена 12 с замедленной рабочей скоростью.
Таким образом получаются два независимых движения, одно с ускоренным вращением, но с меньшим крутящим моментом на выходном звене, другое с замедленной скоростью, но с большим выходным крутящим моментом. Привод позволяет улучшить динамические показатели работы приводного двигателя 1, так как его вал связан с дисковым генератором волн 9 не напрямую, а через систему паразитных шестерен 7, установленных на неподвижных осях 8 в корпусе 3. Это позволяет сократить время переходных процессов при пуске, торможении и реверсировании двигателя 1.
Привод позволяет улучшить динамические показатели работы приводного двигателя 1, так как его вал связан с дисковым генератором волн 9 не напрямую, а через систему паразитных шестерен 7, установленных на неподвижных осях 8 в корпусе 3. Это позволяет сократить время переходных процессов при пуске, торможении и реверсировании двигателя 1.
Предлагаемый дифференциальный привод позволяет обеспечить широкий диапазон регулирования скорости выходного звена за счет суммирования или вычитания угловых скоростей вращения приводных двигателей, простоту конструкции, имеет малые габаритные размеры и высокие динамические показатели работы (малое время переходных процессов при пуске, торможении и реверсировании двигателей).
Формула изобретения
Дифференциальный привод, содержащий по меньшей мере два приводных двигателя, по меньшей мере одну волновую дифференциальную передачу, содержащую генератор волн, гибкое и подвижное жесткое колеса и выходное звено, отличающийся тем, что один из приводных двигателей взаимодействует с внутренним зубчатым венцом генератора волн при помощи паразитных шестерен, подвижное жесткое зубчатое колесо связано с выходным звеном непосредственно, а другой приводной двигатель соединен с гибким колесом волновой передачи посредством зубчатой муфты.
РИСУНКИ
Рисунок 1
Похожие патенты:
Установка с комбинированным приводом и дифференциальным соединением (варианты) // 2126507
Вариатор планетарный бесступенчатый // 2095665
Изобретение относится к машиностроению, а более конкретно к способам регулирования скорости вращения валов исполнительных механизмов и может найти применение, например, в конструкции автомобиля вместо стандартной ступенчатой коробки скоростей
Двухприводная планетарная передача // 2090790
Дифференциальный привод // 2064105
Изобретение относится к области машиностроения и может быть использовано в качестве привода авиационных систем
Бесступенчатая передача // 1733768
Изобретение относится к машиностроению , в частности к бесступенчатым передачам , используемым в трансмиссиях транспортных средств
Привод // 1514991
Изобретение относится к механизмам и приборам с многократным резервированием за счет работы от двух двигателей и позволяет упростить конструкцию и снизить осевые габариты за счет уменьшения числа элементов
Устройство для передачи вращения // 1471013
Изобретение относится к машиностроению
Планетарный привод // 970013
Патент 413066 // 413066
Привод наведения радиотелескопа // 319769
Коробка скоростей // 2168080
Изобретение относится к машиностроению, а именно к устройствам регулирования скорости шпинделей металлорежущих станков, и может быть использовано для обеспечения оптимального режима резания
Планетарная передача // 2217633
Изобретение относится к зубчатым передачам и может быть использовано в машиностроении и приборостроении
Привод // 2238193
Изобретение относится к транспортному машиностроению, в частности к приводу для автомобилей
Зубчатая передача с переменной скоростью // 2247271
Изобретение относится к машиностроению и может быть использовано в зубчатых передачах с переменной скоростью вращения ведомого вала
Транспортное средство // 2283243
Изобретение относится к машиностроению и может использоваться в индустрии развлечений для создания транспортного средства с новыми потребительскими свойствами
Резервированный электропривод // 2283975
Изобретение относится к приводам автоматических устройств и может быть использовано при создании резервированных систем автоматического управления
Система передачи с разделением потока мощности с четырьмя отводами // 2334142
Изобретение относится к системе передач с разделением потока мощности и может быть использовано в транспортных средствах
Трансмиссия для транспортного средства // 2398992
Изобретение относится к трансмиссии транспортных средств
Механизм поворота // 2441792
Изобретение относится к транспортному машиностроению, а именно к гусеничным транспортным средствам
Устройство для сообщения вращательного движения // 2445530
Изобретение относится к области космической техники и может быть использовано, например, для сообщения вращательного движения различным механизмам космических летательных аппаратов
Изобретение относится к машиностроению, в частности к приводам
ПАКПАК » Дифференциальная передача
Друзья!
Мы продолжаем серию публикаций интересных статей из журнала FT:PEDIA, переведённых на русский язык. Сегодня мы познакомимся с дифференциальной передачей.
Сегодня мы познакомимся с дифференциальной передачей.
Журнал: FT:PEDIA 4/2014
Оригинальное название статьи: Das Differentialgetriebe
Автор: Thomas Püttmann
Перевод: Мария Гончарова
Дифференциальная передача
Дифференциальные приводы использовались и продолжают использоваться в различных сферах. Данная статья наглядно разъяснит на примере моделей fischertechnik, как они работают. Это позволит показать на практике, что означает понятие смены системы координат, очень важное для математики, естественных наук и техники.
История
В 1900 г. возле греческого острова Антикитера водолазы нашли остов судна, затонувшего приблизительно в 100 г. до н.э. С этого корабля на поверхность было поднято множество артефактов. Одной из таких находок стал неприметный обломок металла, чье научное и историко-техническое значение было признано общественностью лишь спустя многие десятилетия. Речь шла о частично сохранившемся, невероятно сложном механизме, состоявшем из по меньшей мере 27 зубчатых передач, который использовался для расчета движения Солнца и Луны, а также для предсказания затмений и лунных фаз.
Рис. 1: Дифференциальный привод в том виде, в котором английский историк Дерек де Солла Прайс воссоздал его (вплоть до количества зубцов) по части антикитерского механизма [1]. Современные модели уже не столь точно следуют данной форме.
Сохранившиеся фрагменты совершенно однозначно указывают на то, что в античной Греции эпициклические механизмы ― такие механизмы, в которых кроме обычной передачи движения от одного колеса к другому, некоторые колёса обкатываются вокруг основного колеса (см. рис.1) ― использовались не только в теоретическом моделировании орбит небесных тел, но и в механических передачах. Их существование доказывает, что уже в то время был известен дифференциальный привод с цилиндрической шестерней.
Очень вероятно, что дифференциальный привод использовался в качестве основного механизма в механическом компасе-колеснице Ма Цзюня (ок. 200-265 г.), но данное предположение основывается лишь на упоминании в письменном источнике. Действующих образцов из древнего Китая не сохранилось, прежде всего потому, что каждая новая правящая династия зачастую уничтожала все, что было создано во время правления предшествующей династии.
Рис. 2: Предполагаемая модель компаса-колесницы, воссозданная Джорджем Ланчестером, Лондонский научный музей (Фото: Andy Dingley CC BY 3.0)
Рис. 3: Модель Ланчестера из деталей fischertechnik
Первое достоверно известное применение дифференциального привода было зафиксировано в часах. В 18 веке истинное солнечное время, т.е. время, которое показывали солнечные часы, еще считалось достаточно значимым. Механические часы показывали среднее солнечное время. Чтобы вычислить по их данным истинное солнечное время, на часы зачастую наносились таблицы коррекции. Лондонский часовщик Джозеф Уильямсон в 1720 году впервые использовал дифференциальный привод для механической коррекции [2]. А другому ученому-часовщику впервые пришла в голову идея использовать дифференциальную передачу в автомобильных приводах. В 1748 известный своими механическими игрушками изобретатель Жак де Вокансон (1709-1782) продемонстрировал Людовику XV автомобиль с приводом на все колеса и дифференциальной передачей, приводимый в движение с помощью большого часового механизма.
Рис.4: Модель автомобильного привода Дирка Фокса из деталей fischertechnik
В конце 19-го первой половине 20 веков дифференциальные приводы широко применялись в механических аналоговых вычислительных машинах. Стоит посмотреть очень информативный, хотя и имеющий явную военную направленность, учебный фильм «Basic Mechanisms in Fire Control Computers» (Основные механизмы в системах управления огнем), снятый в 1953 году.
Примеры
Вначале рассмотрим несколько примеров. На рис.5 представлены самый первый дифференциальный привод от fischertechnik, еще из «серо-красного» периода, и современный дифференциальный привод. Они оба работают за счет маленьких конических шестерен, а сам механизм скрыт в корпусе. Поэтому они не годятся для того, чтобы наглядно продемонстрировать функционирование такого привода.
На рис.5 представлены самый первый дифференциальный привод от fischertechnik, еще из «серо-красного» периода, и современный дифференциальный привод. Они оба работают за счет маленьких конических шестерен, а сам механизм скрыт в корпусе. Поэтому они не годятся для того, чтобы наглядно продемонстрировать функционирование такого привода.
Рис.5: Дифференциальные приводы в наборах fischertechnik
Прекрасный образец дифференциального привода с очень удобным для демонстрации дифференциальным корпусом создал Дирк Фокс (см. рис.4 и 6). Здесь также использованы небольшие конические шестерни. Дифференциальный привод, изображенный на рис.7, я разработал специально для того, чтобы максимально наглядно объяснить принцип его работы. Он хорошо подходит для использования в компасе-колеснице или аналоговом компьютере, но менее пригоден для автомобилестроения.
Рис. 6: Дифференциальный привод с коническими шестернями, разработанный Дирком Фоксом
Рис. 7: Дифференциальный привод с зубчатыми передачами
На рис.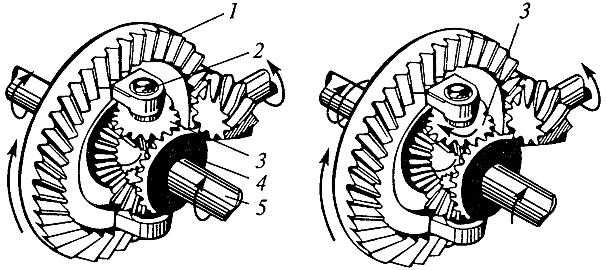 8 и 9 представлены другие примеры дифференциального привода, на которых я хотел бы объяснить основные принципы, из которых следует исходить при разработке таких приводов для конкретных целей с использованием конструктора fischertechnik или же без него. Дальнейшие примеры конструкций вы можете найти в фотогалерее ft-сообщества.
8 и 9 представлены другие примеры дифференциального привода, на которых я хотел бы объяснить основные принципы, из которых следует исходить при разработке таких приводов для конкретных целей с использованием конструктора fischertechnik или же без него. Дальнейшие примеры конструкций вы можете найти в фотогалерее ft-сообщества.
Рис. 8: Дифференциальный привод с зубчатой цилиндрической передачей для использования в компасе-колеснице или аналоговом компьютере
Рис. 9: Дифференциальный привод с зубчатой цилиндрической передачей, пригодный к использованию также и в автомобилестроении
Эксперименты
Если вы хотите получить полное представление о том, как функционирует дифференциальный привод, вам нужно собрать функциональные модели, изображенные на рис.7 и 10. Вращательные движения верхней шестерни, водила и нижней шестерни связаны между собой, т.е. каждый из трех приводных блоков/валов не может приводиться в движение независимо от других. Можно выбрать два блока и повернуть в желаемое положение, третий повернется в установленную позицию сам.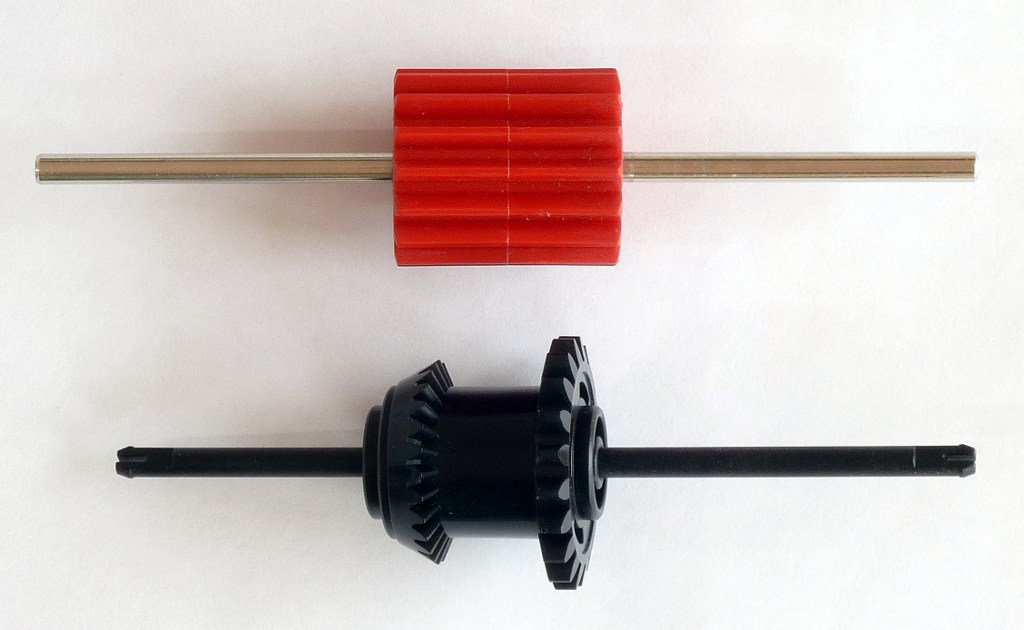 Такая взаимосвязь трех крутящих моментов вокруг общей оси характерна для планетарной коробки передач. Чтобы понять, как осуществляется это взаимодействие, мы рекомендуем вам промаркировать белым цветом зубец на верхней и нижней шестерне таким образом, чтобы оба промаркированных зубца и водило были расположены на одной линии с пазом на красной детали модели (рис.10).
Такая взаимосвязь трех крутящих моментов вокруг общей оси характерна для планетарной коробки передач. Чтобы понять, как осуществляется это взаимодействие, мы рекомендуем вам промаркировать белым цветом зубец на верхней и нижней шестерне таким образом, чтобы оба промаркированных зубца и водило были расположены на одной линии с пазом на красной детали модели (рис.10).
Рис. 10: Маркировка шестерен
Эксперимент 1: Мы удерживаем водило неподвижно и начинаем вращать нижнюю шестерню. Вращательное движение посредством колеса водила передается на верхнюю шестерню. Она начинает поворачиваться на такое же расстояние, что и нижняя, но в противоположном направлении. При этом совершенно неважно, какой размер имеет колесо водила.
Рис. 11: Неподвижное водило
Эксперимент 2: Поместим модель снова в исходную позицию, теперь вместо водила будем удерживать в неподвижном положении нижнюю шестерню, а верхнюю при этом поворачивать. Колесо водила будет вращаться в том же направлении, но лишь на половину заданного угла. Это второе важное наблюдение. Этот факт объяснить не так просто, как наблюдение из первого эксперимента. К нему мы еще вернемся позже
Это второе важное наблюдение. Этот факт объяснить не так просто, как наблюдение из первого эксперимента. К нему мы еще вернемся позже
Рис. 12: Зафиксированная нижняя шестерня
Характеристика дифференциальных приводов
При изготовлении дифференциальных приводов крайне важно придерживаться следующего принципа: планетарная коробка передач будет являться дифференциальным приводом в том случае, если при остановке одного любого ее элемента (приводного блока/вала) она проявляет себя как в рассмотренных выше экспериментах. Иначе говоря: мы выбираем один из элементов и останавливаем его. Тогда два других элемента будут совершать вращение на определенный угол. Если третий элемент поворачивается в том же направлении лишь на половину от траектории вращения первого, или же вдвое дальше при вращении в противоположном направлении, то речь идет о дифференциальном приводе. Конечно же, имеет смысл выбрать тот элемент для остановки, на примере которого легче всего объяснить взаимосвязь между двумя другими элементами.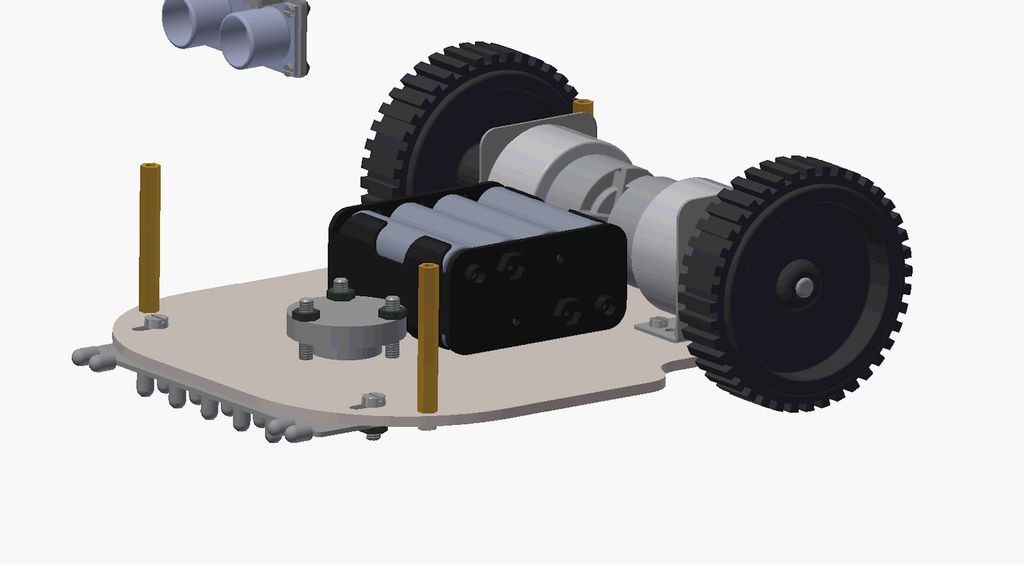 Мы поясним этот принцип с помощью нескольких примеров.
Мы поясним этот принцип с помощью нескольких примеров.
В качестве первого примера рассмотрим антикитерский привод, изображенный на рис.1. Если мы будем удерживать неподвижно поворотный диск со звеньями Z41 [3] и начнем вращение вокруг металлической оси, то оба элемента Z10, а также красный Z15 с зажимной муфтой будут синхронно поворачиваться. Оба черных Z15 также начинают синхронно поворачиваться, но в противоположном направлении. Таким образом, этот привод является дифференциальным.
Во-вторых, рассмотрим привод с рис.8. Водило имеет неподвижное соединение с черной пластмассовой осью. Остановим его. Если мы теперь будем поворачивать правую металлическую ось, а вместе с ней и Z20 на определенный угол, что оба Z10 сместятся на вдвое большее расстояние, но в противоположном направлении, также как и внешние Z15, прочно соединенные с ними посредством валов. Оба внешние элемента Z15, свободно вращающиеся вокруг черной оси, двигаются таким образом в том же направлении, что и Z20, но проходят вдвое большее расстояние. Это означает, что данный привод также является дифференциальным.
Это означает, что данный привод также является дифференциальным.
Подобным же образом дело обстоит и в случае с зубчатой передачей на рис.9. При остановленном водиле оба элемента Z15 вращаются в том же направлении, что и Z20, но проходят лишь половину расстояния. То есть, и в этом случае речь идет о дифференциальном приводе. Отличие от предыдущего привода с зубчатой передачей состоит в том, что теперь пластмассовая и металлическая оси вращаются в противоположном направлении, если внешние элементы Z15 находятся в зафиксированном положении. Этот вариант, как мы видим, подходит для автомобилестроения: Приводящее усилие поступает на красный Z15, колеса достаточно большого размера могут быть прикреплены к обеим осям ― в случае необходимости оси можно удлинить.
Математическое описание
Давайте попробуем описать состояния, в которых может находиться дифференциальный привод, с помощью математического уравнения и, таким образом, поясним на простейшем практическом примере понятие смены системы координат. Первый шаг по направлению к математическому описанию состоит в точном обозначении связанных величин и однозначном определении способа их измерения. Если сэкономить время на данном этапе, в дальнейшем будут возникать неточности.
Первый шаг по направлению к математическому описанию состоит в точном обозначении связанных величин и однозначном определении способа их измерения. Если сэкономить время на данном этапе, в дальнейшем будут возникать неточности.
Рис. 13: Угол x
Связанными величинами являются угол вращения водила и углы вращения обеих шестерен. Задавая параметры угла необходимо обязательно указать, относительно чего ведется измерение и в каком направлении вращения. Мы будем измерять угол по отношению к прямой линии, которая проходит от центральной оси через паз красного блока 30, против часовой стрелки значение будет положительным, по часовой стрелке отрицательным, при этом мы смотрим на модель сверху. Эти три угла x, y и z представлены на рис.13 и 14.
Рис. 14: Углы y и z
В нашем первом эксперименте мы останавливали водило. Данное действие мы опишем уравнением z=0. Мы выявили и объяснили, что в этом случае вращением верхней солнечной шестерни вызвано вращение на такое же расстояние в противоположном направлении. Более точно с математической точки зрения это можно выразить уравнением y = -x или эквивалентно:
Более точно с математической точки зрения это можно выразить уравнением y = -x или эквивалентно:
x + y = 0
Этим уравнением можно описать все состояния привода при остановленном водиле.
Во втором эксперименте мы наблюдали, как при зафиксированной нижней шестерне, т.е. y = 0, водило проходит вдвое меньший путь, чем верхняя солнечная шестерня. Уравнение
x = 2z
описывает, таким образом, все состояния привода при остановленной нижней шестерне. Этому уравнению нет прямого объяснения. Но еще менее понятным представляется нам до сих пор общий случай (рис.15).
Рис. 15: Общее состояние дифференциального привода
Смена наблюдателя
Представим, что существует некий наблюдатель, который вращается вместе с водилом и измеряет угол относительно положения водила, а не относительно прямой линии, проходящей от центральной оси через паз красного блока 30. Этот наблюдатель измеряет три угла z’=0, x’ и y’. Поскольку с его точки зрения колесо водила также связывает движение обеих шестерен между собой, то x’ = — y’ или эквивалентно этому
x’ + y’ = 0.
Теперь основным вопросом будет, как соотносятся друг с другом измеренные нами углы x, y и z и измеренные движущимся вместе с водилом наблюдателем углы x’, y’ и z’. Для того, чтобы это увидеть, повернем обе шестерни и водило вместе на угол -z против часовой стрелки, т.е. на угол z по часовой стрелке. Водило, таким образом, вновь оказывается в исходном положении. Измерим теперь углы x’ и y’, которые до этого были измерены движущимся наблюдателем. Получаем, что x’ = x-z, а y’= y-z. Включение этих двух формул в уравнение x’ + y’ = 0 дает нам [4]:
x + y -2z = 0
Это основное уравнение дифференциальной передачи. Оно описывает все её возможные состояния. Оно наглядно демонстрирует, что вращательное движение водила вычисляется посредством усреднения вращательных движений обеих шестерен. Справедливость данного уравнения можно проверить по рис.13, 14 и 15.
С помощью данного уравнения мы можем еще раз вернуться к нашему второму эксперименту. Там мы останавливали нижнюю шестерню, что описано с помощью уравнения y = 0. Далее мы описывали все возможные состояния привода с помощью уравнения x = 2z. Таким образом мы математически обосновали наше наблюдение.
Далее мы описывали все возможные состояния привода с помощью уравнения x = 2z. Таким образом мы математически обосновали наше наблюдение.
Планетарный привод
Приведенные выше размышления можно обобщить с помощью универсального планетарного привода. Проиллюстрируем это на примере стандартного планетарного привода с колесом с внутренними зубцами (рис.16).
Рис. 16: Планетарный привод
Здесь мы также имеем три угла: угол x солнечной шестерни, угол y колеса с внутренними зубцами и угол z водила, все три угла измеряются относительно одной общей полуоси, на которой они могут быть расположены. В данном случае также проще всего можно понять принцип работы привода, остановив водило. Состояния привода в таком случае можно описать с помощью уравнения
x = -3y,
т.к.соотношение зубцов 10:30, и происходит смена направления вращения. Наблюдатель, вращающийся вместе с водилом, измеряет значение углов x’ и y’, соответствующих уравнению x’ = -3 y’.
Взаимосвязь между нашими углами и углами, полученными движущимся наблюдателем можно представить с помощью уравнений x’ = x-z и y’= y-z, как и в приведенном выше примере. Методом подстановки получаем следующее уравнение:
x + 3y — 4z = 0
Оно описывает все возможные состояния привода.
Для каждого планетарного привода аналогично можно вывести уравнение в форме
n₁ · x + n₂ · y +n₃ · z = 0
Это уравнение называется уравнением Уиллиса. Поскольку все три приводных блока можно постоянно вращать синхронно, то все значения x, y и z при условии x = y = z будут являться решением к данному уравнению. Из этого следует, что n₁ + n₂ +n₃ = 0.
Анонс
В следующем номере мы планируем уделить более пристальное внимание теме компасов-колесниц. При этом мы планируем использовать представленные в данной статье приводы и основные идеи. В дальнейшем мы планируем рассказать об использовании дифференциальных приводов в механических аналоговых вычислительных машинах. Наши сегодняшние размышления наводят на мысль, что линейные системы уравнений можно решать при помощи приводов и подсказывают, как это делается. В действительности, эта идея уже не раз приходила в головы и даже печаталась в различных источниках, однако она так и не нашла убедительного воплощения. Для установки коэффициентов необходимы точные настраиваемые вариативные передачи. До сих пор подходящей концепции для этого нет. Однако для сложения и вычитания отдельных величин в сложных механизмах дифференциальные приводы использовались довольно широко.
О построении моделей
К сожалению, не все зубчатые колеса Z15 (артикул 35695) могут бесперебойно работать на осях. Нужно искать наиболее удачные комбинации из собственного запаса деталей, чтобы получить хорошо работающий привод. В приводах, представленных на рис.1, 8 и 9, использованы зубчатые колеса Z15 (артикул 37685), которые в сегодняшних наборах fischertechnik больше не встречаются. Но их можно без проблем заменить на свободно вращающийся Z15, в который можно воткнуть свернутый трубочкой кусок бумаги, а затем ось. Кусок бумаги в идеале должен иметь длину, достаточную для охвата 4-миллиметовой оси, чтобы ось была расположена точно по центру.
В конце статьи приводим список деталей для конструирования дифференциального привода, представленного на рис. 7:
| Кол-во | Артикул | Наименование |
| 2 | 31022 | Зубчатое колесо Z40 |
| 2 | 31058 | Гайка ступицы цанговой |
| 2 | 68535 | Ступица свободного хода чёрная |
| 2 | 130593 | Ось с концевиком |
| 1 | 32064 | Блок 15 с отверстием |
| 1 | 31032 | Металлическая ось 60 |
| 6 | 37679 | Стопорное кольцо |
| 2 | 35695 | Зубчатое колесо Z15 |
Источники
[1] Derek de Solla Price: Gears from the Greeks. Transactions of the American Philosophical Society, Vol. 64, Part 7, 1974.
[2] Henry C. King: Geared to the Stars. The Evolution of Planetariums, Orreries, and Astronomical Clocks. University of Torronto Press, Torronto, Buffalo, 1978.
[3] fischertechnik: Hobby 2, Motor und Getriebe. Fischer-Werke, Tumlingen, 2/1975.
[4] Thomas Püttmann: Zahnräder und Übersetzungen (Teil 2). ft:pedia 3/2011, S. 25-28.
Дифференциальный привод. Виды самоблокирующихся дифференциалов. Применение дифференциалов в зависимости от их видов
Начнем с того, что означает сам этот автомобильный технический термин на доступном для обычного человека языке. Автомобильный дифференциал — это то, из чего состоит трансмиссия и то, что дает возможность колесам крутится асинхронно, то есть каждые колеса не зависят друг от друга и вращаются отдельно.
Научным языком, (от лат. differentia — разность, различие) дифференциал автомобиля — это устройство, которое разделяет входящую энергию (момент), поступаемую на входной вал между выходными валами. Простое и понятное объяснение расширяет горизонты. Интересуются работой механизмов машин еще и девушки .
Причина использования в конструкциях автомобилей
Во время поворота машины, ведущие приводные колеса вращаются с одинаковой частотой вращения и так, как одно колеса авто совершает поворот по длинной дуге, а другое по короткой, происходит пробуксовка, что плохо сказывается и сопровождается износом шин и доставляет дискомфорт водителю из-за уменьшения качества динамики автомобиля.
Назначение дифференциала
- дает возможность приводным (ведущим) колесам вращаться с разными угловыми скоростями
- служит отдельной доп.передачей в паре с главной передачей. Главная передача — это зубчатый механизм трансмиссии автомобиля, который передает крутящий момент ведущим колесам.
- непрерывно передает крутящий момент, исходящий от двигателя к ведущим колесам.
У переднеприводных авто главная передача и differencial расположены непосредственно в коробке переключения передач.
Если на транспортном средстве установлены более одного двигателя, на каждое колесо один двигатель, то дифференциал не требуется. Но так обычно не делают. Устанавливают 4 двигателя, по одному на каждое колесо, только на самосвалы Белаз. Двигатели эти электрические.
В устройстве гоночных картингов также дифференциал не устанавливают, так как конструкция рамы гибкая, что позволяет слегка приподнимать ведущее заднее колесо с внутренней стороны поворота не приподнимая передние колеса.
на рисунке а) — колеса вращаются с одинаковой частотой, на рисунке б) — движение колес на повороте
1 — ось сателлитов, 2 – ведомая шестерня, 3 — полуосевые шестерни, 4 — сателлит,
5 — ведущая шестерня, 6 — полуоси.
На гоночных автомобилях ралли differencial обычно заваривают сваркой, жестко блокируют и намертво связывают колеса на ведущей оси. Это применяется потому, что такие машины при езде, все повороты проходят с заносом.
Как работает дифференциал
Принцип действия. Главная передача посредством шестерни передает крутящую энергию на корпус и сателлиты, которые сцеплены с шестернями полуосей.
Когда скорость вращения колес одинакова, сателлиты сидят неподвижно (см. рисунки ниже).
При изменении угловых скоростей колес, например, при повороте или пробуксовке из-за неровностей дорог и так далее, происходит вращение сателлитов. Сателлиты служат для компенсации разницы частот вращения колес.
Рассмотрим на примере — автомобиль буксует на льду. Здесь одно колесо буксует, потому что нет сцепления со льдом, а значит и нет крутящего момента. А так как свободное блокирующее устройство распределяет тягу поровну на колеса, то раз нет крутящей силы на одном колесе, значит оно исчезает и на втором.
Выход из такой ситуации — создать противодействующую силу на противоположном колесе. А это делает блокировка. Необходимо заблокировать буксующее противоположное колесо и тогда появится противодействующая сила для противоположного колеса.
Как работает дифференциал на полноприводном автомобиле
На джипах, седанах, хэтбчеках и универсалах 4х4, если установлен свободный симметричный дифференциал, происходит следующая ситуация. Во время движения без пробуксовок на каждое колесо распределяется по 25% энергии кр.момента поровну.
Но если одно колесо буксует, например на льду, крутящая энергия снижается до нуля, так как колесо не может сцепиться с гладкой поверхностью льда. В такой ситуации, если одно колесо осталось без вращения, то и на противоположном соседнем колесе исчезает энергия вращения, потому что в данном примере установлен симметричный межосевой.
Получается одна ось осталась без вращения, поэтому и пропадает крутящий момент и на второй оси, так как differencial межосевой симметричный. Результат — на всех 4 ведущих колесах нет вращения.
В современном автомобилестроении существует множество технических решений реализации дифференциала. В зависимости от привода автомобиля используют различные типы узлов: для заднеприводных, переднеприводных и дифференциальные устройства для внедорожников. Кроме того этот узел трансмиссии классифицируют по внутреннему устройству (конический, цилиндрический, червячный) и способу блокировки.
Предназначение дифференциала в автомобиле
Основная задача дифференциала — обеспечивать колёсам разную скорость вращения. Такой способ вращательного движения необходим для правильного вхождения машины в повороты, при пробуксовке колес и в другие моменты. Когда машина поворачивает, то разные колёса описывают разные траектории. Если ведущие колеса будут двигаться с одинаковой скоростью, то выполнить поворот на такой машине будет очень сложно. Распределение моментов между приводимыми в движение колёсами происходит при помощи дифференциала.
Во время пробуксовки одного из колёс, обычный планетарный механизм начнёт работать в сторону увеличения крутящего момента. Колесо начинает буксовать ещё сильнее. Колесо, находящееся на твёрдой поверхности, перестанет крутиться. Для решения таких проблем дифференциальные устройства обеспечиваются блокировочными механизмами различных типов: ручными или автоматическими. Блокировка дифференциала значительно повышает проходимость полноприводного автомобиля. Пока хотя бы одно колесо цепляет дорогу, машина двигается.
Классификация дифференциалов
Различают два основных вида дифференциальных механизмов: межколёсный и межосевой. Межколёсный предназначается для различных автомобилей с приводом на два колеса. Межосевой делит крутящий момент на все четыре. В зависимости от модели дифференциала, используются различные конструктивные решения механизма. В переднеприводных машинах этот узел обычно помещают в картере коробки передач. У заднепрводных раздаточные шестерни размещают в корпусе заднего моста.
Полноприводные внедорожники используют для размещения дифференциального механизма чаще всего отдельную раздаточную коробку («Land Cruiser», «Нива»). Некоторые производители используют конструкцию с двумя раздельными дифференциалами (Jeep «Cherokee», UAZ «Hunter»), размещёнными в переднем и заднем мостах.
Устройство и схема работы дифференциала на примере свободного дифференциала
Самым простым устройством на базе планетарного редуктора является свободный дифференциал. Рассмотрим вкратце принцип его действия. Вращение от двигателя передаётся на механизм шестернёй главной передачи. Зубья жёстко передают движение на ведомую шестерню большого размера, находящуюся в корпусе дифференциала.
На ведомой шестерёнке закреплены два конических сателлита с двумя степенями свободы: они вращаются вместе с ведомой шестернёй, и одновременно могут вращаться вдоль своей оси. Когда автомобиль едет прямо, сателлит бежит по большому кругу и передаёт одинаковое вращательное движение на обе полуоси. Как только машина поворачивает, сателлиты совершают вращательные движения вокруг своей оси, и скорость вращения полуосей изменяется. В результате одно из колёс движется медленнее, а другое, описывающее больший поворотный радиус, быстрее.
Зачем необходима блокировка дифференциала?
У свободного дифференциала есть один большой недостаток. В момент пробуксовки одного из колёс, сателлит начинает прокручиваться и передавать весь импульс движения на него. Буксующее колесо крутится с большой скоростью, в то время как стоящее на твёрдой почве второе колесо, бездействует. Особенно опасно, когда такие процессы происходят на большой скорости.
Если на дороге попадается участок с неравномерной обледенелой поверхностью, то машина со свободным дифференциалом может уйти в неуправляемый занос. Для решения этой проблемы используется блокировка дифференциала.
Типы дифференциалов по способу блокировки
Естественным решением предотвращения пробуксовки является временная приостановка одного из компонентов механизма. Существует несколько решений этой задачи: можно временно блокировать одно из колёс, полуось, сам дифференциальный узел или даже двигатель. По способу реализации разделяют блокировки следующих типов: ручная, самоблокирующаяся, электронная.
Дифференциалы с ручной блокировкой
Самым простым вариантом блокирования дифференциального механизма является его ручное отключение. Обычно такая функция реализуется с помощью специального рычага или кнопки в салоне внедорожника. Движением рычага блокируется возможность вращения сателлитов вдоль своей оси, и планетарка становится обычной муфтой. Выполнять подобную операцию следует только во время полной остановки автомобиля с выжатым сцеплением.
Использовать блокировку следует при движении на малых скоростях по сложнопроходимым дорогам. При отключенном дифференциале, автомобиль становится трудноуправляемым и стремится ехать по прямой.
Поэтому ручное управление механизмом раздачи мощности по колёсам требует определённых навыков водительского мастерства. Ручной блокировкой дифференциала оборудуются внедорожники с жёсткой рамой: «Land Cruiser», «Hilux», «Нива» и другие.
Для увеличения проходимости автомобиля и упрощения управлением в трудных условиях были созданы несколько моделей самоблокирующихся дифференциалов. Принцип работы этих узлов основан на возникновении блокировки работы узла при определённых обстоятельствах.
Дифференциалы Speed sensitive
Рассмотрим подробнее дифференциалы Speed sensitive, которые срабатывают, если полуоси начинают вращаться на различных угловых скоростях.
Примером автомобиля, где установлен такой тип дифференциала, может служить Toyota «Rav4» с вискомуфтой. Одна часть этого узла закреплена на чашке дифференциала, другая часть на полуоси. В режиме обычного движения или небольшом расхождении в повороте, рабочие поверхности муфты двигаются независимо и не мешают вращению полуосей. Вращение одной из осей, с заметно большей скоростью, приводит к тому, что вискомуфта срабатывает и начинает тормозить движение.
При падении скорости, сила трения уменьшается, и части узла вновь становятся независимыми. Такой дифференциал вполне подходит для автовладельцев, которые не стремятся покорить все вершины бездорожья. В городском режиме и на грунтовых дорогах машины с такими дифференциалами прекрасно себя зарекомендовали. Но у вискомуфты есть проблемные места — в сложной ситуации она не тянет нагрузками, начинает греться, запаздывает со включением и может прийти в нерабочее состояние.
На спецтехнике устанавливают другой тип самоблокирующихся дифференциальных механизмов — кулачковые пары. Примером реализации служит «ГАЗ-66». Данная конструкция узла позволяет в разы повысить проходимость машины, но чревата опасными ситуациями, когда дифференциал самопроизвольно заклинивает. Схема действия проста, как всё гениальное. Вместо планетарки в механизме применяются зубчатые пары. Они свободно поворачиваются при малейших расхождениях в скоростях колёс, а при значительном расхождении заклинивают.
Интересный вариант конструкторского решения самоблокирующегося дифференциала реализован в Kia «Sportage». Основанный на похожих методах, что и вискомуфта, этот тип использует пластины для торможения нежелательных вращений. Принципиальным отличием или существенным усовершенствованием является использование гидравлической системы для сближения фрикционных пластин.
При возникновении большой разницы в скоростях полуосей срабатывает насос, который нагнетает давление масла в системе фрикционов и заставляет пластины сближаться. Таким образом, скорость вращения пробуксовывающего колеса начинает снижаться, и происходит перераспределение крутящего момента.
Дифференциалы Torque sensitive
Более современным и эффективным можно назвать дифферинциалы Torque sensitive, приходящие в рабочее состояние при снижении скорости вращения на одной из полуосей. Такой узел осуществляет контроль за показателями скоростей вращения и снижает их в автоматическом режиме.
Конструктивно такие дифференциальные устройства представляют собой обычный свободный дифференциал с комплектом подпружиненных фрикционных гасителей скорости, размещённых между полуосями и чашкой дифференциала. Принцип действия основан на свойствах гипоидных передач, которые могут самопроизвольно разблокироваться. Различают три основных конструктивных реализации этого типа дифференциалов.
Первый тип использовался на внедорожнике Toyota «Celica GT-4» и назывался Т-1. Каждая полуось в этом узле имеет свои сателлиты, связанные между собой. Таким образом, как только возникает разница в крутящих моментах сателлитов, червяк синхронизирует их, и колёса будут крутиться с одной и той же скоростью. Диапазон их разницы определяется углом наклона зубчиков межсателлитового вала.
Такой механизм приводит к тому, что колёса либо движутся с одной скоростью (при езде по прямой), либо благодаря синхронизированным сателлитам делают обороты с различными скоростями (при повороте). Никаких пробуксовок не возникает. Модель узла трансмиссии с такими характеристиками стала популярна не только среди внедорожников, её установили на спортивную машину Mazda «RX-7» (1991 г.).
В продолжение серии была выпущена модель T-2, более чувствительная к разнице в скоростях. Как и аналогичный механизм Rod Quaife, эта конструкция отличается наличием более сложной передачи между сателлитами вместо червяка. Эта модель приобрела ещё большую популярность и применима для большого количества машин: BMW «Z3», Audi «A4», «A6», «A8», родстеры Honda «S2000», Volkswagen «Passat» (B6), Mazda «MX-5», внедорожники «Range Rover», Hummer.
Третья разновидность дифференциалов модели Torque sensitive называется Т-3 и используется чаще всего в качестве межосевых узлов. Это более совершенная конструкция позволяет автоматически распределять нагрузку между задней и передней осями в определенном промежутке. Обычно это происходит в диапазоне 65 на 35. Если на пути Lexus «GX 470», оснащенного таким дифференциалом, выступает препятствие, то сила тяги у него будет подаваться на те колёса, которые ещё могут зацепить дорожное покрытие.
Дифференциалы с электронным управлением
Механический способ блокировки дифференциала не стоит рассматривать, как единственную разработку, направленную на улучшение проходимости и повышение контроля за автомобилем. Примером может служить система управления трансмиссией с помощью электроники — Traction Control (TRAC) — схема контролирования за тягой и сцеплением колёс. В основе TRAC лежит простой принцип: отслеживание и коррекция частоты оборотов колёс при помощи специальных датчиков.
Как только колесо начинает буксовать, в это время включается тормоз и крутящий момент уходит на другую полуось. На первый взгляд машина будет вести себя, как будто у неё блокировали дифференциал. На самом деле эта система даже эффективнее механической блокировки, проще в исполнении и надежнее. Кроме того, TRAC не создает помех в работе механизмов любых дифференциалов, а является их удачным дополнением. Именно поэтому современные внедорожники, такие как «Hilux», Lexus, «Prado» оборудованы электронным управлением Traction Control.
Наиболее популярным и современным решением в области конструирования дифференциального узла стало изобретение активного дифференциала. Идея этого механизма в том, чтобы не тормозить полуоси и колёса, а напротив, разгонять их до большей скорости. С помощью электроники и фрикционных сцеплений колесо, бегущее по внешнему кругу, получает в разы больший момент, чем внутреннее.
Благодаря этому техническому решению прохождение крутых поворотов отличается легкостью и устойчивостью. Это обстоятельство сразу же взяли на вооружение производители спортивных автомобилей. Но до выхода в широкое производство этому типу дифференциалов ещё далеко.
Заключение
Дифференциал за годы своего существования прошёл большой путь эволюционного развития и это не удивительно. Конструкторы автомобилей сделали всё возможное, чтобы этот узел стал надёжным и обеспечивал комфортное и беспрепятственное движение автомобиля. Если задаваться вопросом, с каким дифференциалом выбрать машину, то это наиболее улучшенная модель из разряда Torque sensitive, с дополнением в виде электронного управления Traction Control.
В случае с автомобилем, дифференциал отвечает за распределение момента между ведущими колесами, а также позволяет колесам вращаться с разной угловой скоростью при определенных условиях.
Читайте в этой статье
Где находится дифференциал в устройстве трансмиссии автомобиля, виды дифференциалов
Как известно, автомобили бывают переднеприводными, заднеприводными, а также полноприводными. Что касается места расположения дифференциала:
- если привод реализован на передние колеса, дифференциал находится в самой ;
- на заднеприводном авто дифференциал устанавливается в картере заднего моста;
- в автомобилях с полным приводом для привода ведущих колес дифференциал стоит в картере переднего и заднего моста, а для привода ведущих мостов механизм устанавливается в раздаточной коробке (раздатке).
Также дифференциалы бывают межколсесными и межосевыми. Если дифференциал использован для привода ведущих колес, это межколесный дифференциал. Межосевой дифференциал располагается между ведущими мостами применительно к автомобилям с полным приводом.
Что касается устройства и особенностей конструкции, в основу дифференциала положен планетарный редуктор. С учетом типа зубчатой передач, которая применена в редукторе, дифференциал (редуктор) может быть: коническим, цилиндрическим, червячным. Теперь давайте рассмотрим устройство и принцип работы дифференциала более подробно.
Устройство дифференциала и принцип работы
Начнем с первого типа. Конический дифференциал зачастую выполнят функцию межколесного дифференциала. Цилиндрический дифференциал обычно встречается на полном приводе и ставится между осями. Червячный дифференциал универсален, что позволяет ставить механизм как между колесами, так и использовать в качестве межосевого.
При этом наиболее распространенным является конический дифференциал, а базовые элементы его конструкции активно используются и в устройстве других типов дифференциалов. По этой причине рассмотрим устройство и принцип работы конического дифференциала в качестве примера.
- Итак, конический дифференциал, как уже было сказано выше, фактически является планетарным редуктором. В конструкцию включены полуосевые шестерни и сателлиты, которые находятся в корпусе (чашке дифференциала).

На корпус от главной передачи передается крутящий момент, затем через сателлиты происходит его передача на полуосевые шестерни. Также на корпусе крепится ведомая шестерня главной передачи (крепление жесткое). В корпусе установлены оси, на осях вращаются сателлиты.
Сами сателлиты, которые реализуют функцию планетарной шестерни, позволяют соединить корпус и полуосевые шестерни. С учетом того, какую величину крутящего момента нужно передать, в конструкцию дифференциала могут интегрировать 2 или 4 четыре сателлита.
Солнечные (полуосевые шестерни) осуществляют передачу крутящего момента на ведущие колеса автомобиля. Передача происходит через полуоси, соединение полуосевых шестерен и полуосей выполнено через шлицы.
Полуосевые шестерни бывают левыми и правыми, с одинаковым или разным количеством зубьев. Если число зубьев одинаковое, тогда это симметричный дифференциал, разное количество зубьев на левой и правой шестерне используется в устройстве несимметричных дифференциалов.
В первом случае симметричный дифференциал позволяет распределять крутящий момент по осям в равной степени, причем независимо от величины угловых скоростей ведущих колес.
Такой дифференциал используют для установки между колесами (симметричный межколесный дифференциал). Несимметричный дифференциал способен разделять крутящий момент в том или ином соотношении. Данная особенность позволяет использовать его между ведущими осями.
Теперь перейдем к принципам работы дифференциала. Прежде всего, симметричный дифференциал работает в трех основных режимах. Первый режим – движение по прямой, второй — движение в повороте, третий — езда по дорогое с плохим сцеплением (грязь, лед и т.д.).
Когда автомобиль движется прямо, колеса испытывают равнозначное сопротивление. Происходит передача крутящего момента от главной передачи на корпус дифференциала. Вместе с корпусом перемещаются сателлиты, которые, в свою очередь, осуществляют передачу момента на ведущие колеса.
С учетом того, что вращения сателлитов на осях не происходит, движение полуосевых шестерен осуществляется с равной угловой скоростью, частота вращения левой и правой шестерни равна частоте вращения ведомой шестерни главной передачи.
Однако если машина заходит в поворот, колесо, которое находится ближе к центру (внутреннее ведущее) нагружается сильнее и начинает испытывать большее сопротивление сравнительно с наружным колесом (дальним от центра поворота).
В результате роста нагрузки внутренняя полуосевая шестерня несколько замедляет вращение, а это приводит к тому, что сателлиты начинают вращаться вокруг своей оси. Такое вращение сателлитов приводит к увеличению частоты вращения наружной полуосевой шестерни.
- На практике возможность движения ведущих колес с разными угловыми скоростями делает возможным прохода поворота без пробуксовок. Кстати, крутящий момент все равно распределяется на ведущие колеса равнозначно.
Если же автомобиль забуксовал в грязи, в снегу или на льду, одно колесо испытывает большее сопротивление, чем другое. В этом случае дифференциал (благодаря своей конструкции) инициирует ускоренное вращение буксующего колеса, тогда как другое колесо замедляется.
Однако недостаточная сцепка с покрытием не позволяет получить большой крутящий момент на буксующем колесе, а особенность работы симметричного дифференциала не позволит также развить нужный момент на другом колесе. Часто в этом случае машина попросту не может продолжить дальнейшее движение.
Выходом из ситуации становится необходимость увеличения крутящего момента на колесе, которое не буксует. Для этого дифференциал необходимо заблокировать. По этой причине внедорожники имеют дополнительную возможность блокировки дифференциала, тогда как легковые авто и даже некоторые современные бюджетные «паркетники» лишены такой функции.
Читайте также
Устройство и принцип работы механической коробки передач. Виды механических коробок (двухвальная, трехвальная), особенности, отличия
Прежде чем приступить к рассмотрению дифференциалов, их типов и нюансах работы, сначала мы с вами обратимся к теории. Для чего вообще нужен дифференциал на современных автомобилях и какой принцип его работы?
Дифференциал, как говорит теория, это механическое устройство с особым видом планетарной зубчатой передачи, разделяющий момент входного вала (в нашем случае карданного вала) между выходными валами (полуосями) автомобиля, передающий, момент силы с карданного вала на задние полуоси в заднеприводном варианте или непосредственно от двигателя сразу на полуоси в переднеприводном автомобиле так (дифференциал в расположен в КПП), что угловые скорости вращения этих полуосей могут быть разными по отношению друг к другу и колеса автомобиля проходят разный путь (например в повороте). Опять же, все из теории, во время прохождения поворота колеса автомобиля проходят по различным траекториям, а именно, по внутренней и внешней, отсюда соответственно получается, что колесо вращающееся по внешнему радиусу проделывает (пробегает) больший путь чем то колесо, которое вращается по внутреннему радиусу, а значит, что и скорость такого вращения колес будет разная, т.е. скорость колеса вращающегося (пробегающего) по внутреннему радиусу должна быть меньше той скорости колеса, которое вращается по внешнему радиусу.
В этом как-раз непосредственно и заключается главная задача дифференциала, т.е. правильно распределять скорости вращения валов на выходе и соответственно самих колес.
Предназначение дифференциала автомобилей:
— позволяет ведущим колёсам вращаться с разными угловыми скоростями;
— неразрывно передаёт крутящий момент от двигателя на ведущие колёса.
Основная проблема, появившаяся на заре автомобильной эры, была решена с помощью применения дифференциала, теперь повороты машине можно проходить более безопасно и без пробуксовки колес, а отсюда соответственно и без чрезмерной нагрузки на трансмиссию, на шины и на сами подшипники колес. Но зато появилось другое неудобство.
Простейший дифференциал имеет одну яркую «особенность», благодаря которой он категорически не подходит для сложных, экстремальных дорожных ситуаций.
Когда у ведущих колес 100% сцепление с дорогой, то все будет идти хорошо и дифференциал будет исполнять свою функцию просто идеально, но стоит одному из колес попасть в ситуацию когда оно (шина) потеряет сцепление с дорогой, или попадет на другой тип грунта или на лед, то начнет вращаться именно то колесо, которое потеряло сцепление, а противоположенное стоящее на более цепком грунте просто останется неподвижным.
Не вдаваясь в сами нюансы работы механизма можно просто констатировать факт, что дифференциал не меняет свой крутящий момент, он просто перераспределяет мощность между колесами и такая мощность будет всегда больше на том именно колесе, которое вращается быстрее. При пробуксовке колеса сопротивление его и крутящего момента будет минимальным, а значит чрезвычайно малым будет и крутящий момент передающийся с самого двигателя непосредственно на колесо, а значит и на противоположенном колесе этот крутящий момент будет ему соответствовать, то есть он будет минимальным.
В этой связи инженеры и автопроизводители большинства автокомпаний начали искать новое решение с этой проблемой. Появилось большое количество (различных видов устройств) дифференциалов. Основные виды таковых нам и хотелось бы освятить в данной статье. А также нам хотелось бы рассказать своим читателям и об основных преимуществах и конкретных недостатках тех или иных видов этих устройств, и еще, на каких современных автомобилях можно сегодня встретить тот или иной тип дифференциалов.
Свободный дифференциал (Open Differential).
Суть его работы.
Разделяет крутящий момент двигателя на две оси, каждая из которых способна вращаться с различной скоростью.
Недостатки.
При потери сцепления колеса с дорогой крутящий момент на противоположном колесе тоже снижается (падает). В худшем варианте, у застрявшего автомобиля одно колесо будет свободно вращается, в то время, как противоположенное с лучшим сцеплением не сможет просто передать поверхности (дороге) достаточно крутящего момента, чтобы сдвинуть автомобиль с места.
Современные системы управления тягой компенсируют это, путем применения тормозов к потерявшему сцепление колесу. Но данный подход к проблеме помогает лишь отчасти, более сложный дифференциал, как правило действует быстрее и он более эффективен, чем тот же стандартный тип такого механизма.
Устанавливается на большинство автомобилей у которых «отсутствуют претензии» на нехватку большой мощности (они достаточно мощные), или у которых «отсутствуют амбиции» к любому бездорожью (внедорожники), а также на семейные седаны, и т.д.
Блокируемый дифференциал (Locking Differential).
Как он работает.
При заблокированном дифференциале колеса машины будут постоянно вращаться с равными скоростями. В песке, в грязи и на снегу заблокированный дифференциал гарантирует, что крутящий момент продолжит поступать на колеса с более высокой тягой.
Недостатки.
В незаблокированном виде данный механизм ведет себя точно также, как и свободный дифференциал. Блокировка дифференциала на поверхности с высоким уровнем сцепных свойств, как например, на том же сухом асфальте, затрудняет поворачиваемость автомобиля и может нанести серьезный вред автомобильной трансмиссии.
На каких автомобилях его можно обнаружить.
Wrangler, ; опционально его можно поставить на большинство полноразмерных джипов и пикапов.
Самоблокирующийся дифференциал (Limited-slip Differential). Дифференциал повышенного трения.
Как он работает.
Самоблокирующийся дифференциал совмещает в себе две концепции,- свободную и блокируемую системы дифференциалов. Он способен функционировать большую часть времени как обычный дифференциал, а в нужный момент автоматически блокироваться, т.е. в тот момент, когда происходит проскальзывание одного из колес. Блокировка достигается за счет вязкостной муфты, или фрикционной муфты, или за счет сложной системы гидророторного типа. В военных автомобилях ставятся зубчатые или кулачковые самоблокирующиеся дифференциалы.
Недостатки.
Чисто механические дифференциалы повышенного трения являются реактивными. То есть, они не блокируются пока не произошла пробуксовка колеса.
На каких автомобилях его можно обнаружить.
со Sport пакетом (с вискомуфтой), (clutch-type), (helical gears).
Самоблокирующийся дифференциал с электронным управлением (Electronically Controlled Limited-slip Differential).
Как он работает.
Преимущества такого электронного управления в том, что повышается тяга в повороте и степень блокировки дифференциала можно настроить.
Например, если компьютер автомобиля определяет, что в повороте у него (автомобиля) избыточная поворачиваемость, то он может сильнее заблокировать дифференциал для того чтобы стабилизировать автомобиль.
Многие покупатели при выборе внедорожника наверняка сталкивались в описании той или иной модели с термином «электронная блокировка дифференциала». Но что это такое, и как работает этот самый дифференциал, знают далеко не все потенциальные владельцы автомобилей этого класса. В нашем сегодняшнем материале мы подробно расскажем, для чего машине дифференциал, каковы его разновидности и на какие автомобили он устанавливается.
На фото самоблокирующиеся дифференциалы
История создания и назначение дифференциала
На автомобилях, оснащенных двигателем внутреннего сгорания, дифференциал появился через несколько лет после их изобретения. Дело в том, что первые экземпляры машин, приводимых в действие двигателем, имели очень плохую управляемость. Оба колеса на одной оси при повороте вращались с одинаковой угловой скоростью, что приводило к пробуксовке колеса, идущего по внешнему, большему, чем внутренний, диаметру. Решение проблемы было найдено просто: конструкторы первых автомобилей с ДВС позаимствовали у паровых повозок дифференциал – механизм, изобретенный в 1828 году французским инженером Оливером Пекке-Ром. Он представлял собой устройство, состоящее из валов и шестерней, через которые крутящий момент от двигателя передается на ведущие колеса. Но после установки на автомобиль дифференциала обнаружилась еще одна проблема – пробуксовка колеса, утратившего сцепление с дорогой.
Обычно это проявлялось, когда автомобиль двигался по дороге, покрытой участками льда. Тогда колесо, попавшее на лед, начинало вращаться с большей скоростью, чем то, которое находилось на грунте или бетоне, что в итоге приводило к заносу автомобиля. Тогда конструкторы задумались об усовершенствовании дифференциала с тем, чтобы при подобных условиях оба колеса вращались с одинаковой скоростью и автомобиль не заносило. Первым, кто проводил эксперименты с созданием дифференциала с ограниченным проскальзыванием, стал Фердинанд Порше.
Ему понадобилось три года, чтобы разработать, протестировать и выпустить на рынок так называемый кулачковый дифференциал – первый механизм с ограниченным проскальзыванием, который устанавливался на первые модели марки Volkswagen. Впоследствии инженеры разработали различные виды дифференциалов, о которых речь пойдет ниже.
В автомобиле дифференциал выполняет три функции: 1) передает от двигателя к ведущим колесам, 2) задает колесам разные угловые скорости, 3) служит в сочетании с главной передачей.
Устройство дифференциала
Усовершенствованный автомобильными конструкторами дифференциал устроен в виде планетарной передачи, где крутящий момент от двигателя передается через карданный вал и коническую зубчатую передачу на корпус дифференциала. Тот, в свою очередь, направляет крутящий момент на две шестерни, а уже они распределяют момент между полуосями. Сцепление между шестернями-сателлитами и полуосями имеет две степени свободы, что позволяет им вращаться с разными угловыми скоростями.
Таким образом, дифференциал обеспечивает разную скорость вращения колес, расположенных на одной оси, что предотвращает и пробуксовку при повороте. После того, как был изобретен , у автомобиля появилось два, а впоследствии и три (с межосевым) дифференциала, которые распределяли крутящий момент между ведущими осями.
Уже понятно, что без дифференциала не обходится ни один автомобиль. В передне- и заднеприводных автомобилях он расположен на ведущей оси. Если у автомобиля сдвоенная ведущая ось, то здесь в конструкции трансмиссии применяют два дифференциала — по одному на каждую ось. В полноприводных машинах дифференциалов два (для моделей с подключаемым полным приводом – по одному на каждую ось) или три (для моделей с постоянным полным приводом – по одному на каждую ось, плюс межосевой дифференциал, который распределяет крутящий момент между осями). Кроме количества механизмов, устанавливаемых на автомобили с разными типами приводов, дифференциалы различают по виду блокировки.
Разновидности дифференциалов
По виду блокировки дифференциалы делятся на два – ручная и электронная блокировка. Ручная, как следует из названия, производится водителем вручную при помощи кнопки или тумблера. В этом случае шестерни-сателлиты механизма блокируются, ведущие колеса двигаются с одинаковой скоростью. Обычно ручная блокировка дифференциала предусмотрена на внедорожниках.
Электронная или автоматическая блокировка дифференциала осуществляется при помощи электронного блока управления, который, анализируя состояние дорожного покрытия (используется информация с датчиков и антипробуксовочной системы), сам блокирует шестерни-сателлиты.
Задний дифференциал с электронным управлением Range Rover Sport
По степени блокировки это устройство делится на дифференциал с полной блокировкой и дифференциал с частичной блокировкой шестерен-сателлитов.
Полная блокировка дифференциала предполагает 100%-ную остановку вращения шестерен-сателлитов, при которой сам механизм начинает выполнять функцию обычной муфты, передавая равнозначный крутящий момент на обе полуоси. Вследствие этого оба колеса вращаются с одинаковой угловой скоростью. Если же одно из колес теряет сцепление с дорогой, весь крутящий момент передается на колесо с лучшим сцеплением, что позволит преодолеть бездорожье. Такое устройство дифференциала используется на внедорожниках , и других.
Частичная блокировка дифференциала предполагает неполную остановку вращения шестерен-сателлитов, то есть с проскальзыванием. Достигается такой эффект за счет так называемых самоблокирующихся дифференциалов. В зависимости от того, каким образом срабатывает этот механизм, их делят на два вида: Speed sensitive (функционируют при разнице в угловых скоростях вращения полуосей) и Torque sensitive (функционируют при уменьшении крутящего момента на одной из полуосей). Такое устройство дифференциала используется на внедорожниках Mitsubishi Pajero, Audi с , BMW с системой X-Drive и так далее.
Дифференциалы, относящиеся к группе Speed sensitive, имеют разную конструкцию. Существует механизм, в котором роль дифференциала играет вискомуфта. Она представляет собой резервуар, расположенный между полуосью и ротором карданного вала, заполненный специальной вязкой жидкостью, в которую, в свою очередь, погружены диски, сочлененные с полуосью и ротором. Когда угловая скорость вращения колес разнится (одно колесо вращается быстрее другого), диски в резервуаре тоже начинают вращаться с разными скоростями, но вязкая жидкость постепенно выравнивает их скорость, и, соответственно, крутящий момент. Как только угловые скорости обоих колес сравняются, вискомуфта отключается. По своим характеристикам вискомуфта менее надежна, чем фрикционный дифференциал, поэтому ее устанавливают на машины, предназначенные для преодоления бездорожья средней степени или спортивные модификации автомобилей.
Еще один механизм дифференциала, относящийся к группе Speed sensitive – героторный дифференциал. Здесь роль блокировки, в отличие от вискомуфты, играет масляный насос и фрикционные пластины, которые монтируются между корпусом дифференциала и шестерней-сателлитом полуосей. Но принцип действия во многом схож с таковым у вискомуфты: при возникновении разницы в угловых скоростях ведущих колес насос нагнетает масло на фрикционные пластины, которые под давлением блокируют корпус дифференциала и шестерню полуоси до тех пор, пока скорости вращения колес не сравняются. Как только это происходит, насос перестает работать и блокировка отключается.
Дифференциалы, относящиеся к группе Torque sensitive, тоже имеют разную конструкцию. К примеру, есть механизм, в котором используется фрикционный дифференциал. Его особенностью является разность угловых скоростей вращения колес при движении автомобиля на прямой и в повороте. При езде по прямой дороге угловая скорость обоих колес одинаковая, а при прохождении поворота ее значение различно для каждого колеса. Это достигается за счет установки между корпусом дифференциала и шестерней-саттелитом фрикциона, который способствует улучшению передачи крутящего момента на колесо, утратившее сцепление с дорогой.
Еще один тип дифференциалов — с гипоидным (червячным или винтовым) и косозубым зацеплением. Их условно делят на три группы.
Первая – с гипоидным зацеплением, в которой у каждой полуоси есть собственные шестерни-сателлиты. Они объединятся между собой при помощи прямозубого зацепления, причем ось шестерни располагается по отношению к полуоси перпендикулярно. При возникновении разницы в угловых скоростях ведущих колес, шестерни полуосей расклиниваются, образуется трение между корпусом дифференциала и шестернями. Происходит частичная блокировка дифференциала и крутящий момент передается на ту ось, угловая скорость вращения которой меньше. Как только угловые скорости колес выровняются, происходит деактивация блокировки.
Вторая – с косозубым зацеплением, в которой у каждой полуоси также есть свои шестерни-сателлиты (они винтовые), но их оси располагаются параллельно полуосям. А объединяются эти агрегаты между собой при помощи косозубого зацепления. Сателлиты в этой механизме установлены в специальных нишах на корпусе дифференциала. Когда угловая скорость вращения колес различается, происходит расклинивание шестерен, и они, сопрягаясь с шестернями в нишах корпуса дифференциала, частично блокируют его. При этом крутящий момент направляется на ту полуось, скорость вращения которой меньше.
Третья – с косозубыми шестернями полуосей и винтовыми шестернями сателлитов, которые располагаются параллельно друг другу. Такой тип используется в конструкции межосевого дифференциала. Благодаря планетарной конструкции дифференциала, имеется возможность посредством частичной блокировки смещать крутящий момент на ту ось, угловая скорость вращения колес которой меньше. Диапазон такого смещения весьма широк – от 65/35 до 35/65. При установлении равнозначной угловой скорости вращения колес передней и задней оси дифференциал разблокируется.
Эти группы дифференциалов получили самое широкое применение в автомобилестроении: их устанавливают как на «гражданские» модели, так и на спортивные.
Страница не найдена — Инженерная практика
Свежий выпуск: № 05/2022
Популярное в этом месяце
Автономный актив. Отдельные элементы и перспективы развития
КУЗЬМИН Максим Игоревич, ООО «Газпромнефть НТЦ»ГРЕХОВ Иван Викторович, ООО «Газпромнефть НТЦ»ГЕРАСИМОВ Ростислав Владимирович, ООО «Газпромнефть НТЦ»
Применение ремонтного состава для нанесения на резьбу и внутреннюю фаску трубы после ремонта НКТ с полимерным покрытием: проблемы и перспективы
ИДРИСОВ Александр Юрьевич, ООО «РН-Ремонт НПО»
Результаты работы с механизированным фондом скважин ПАО «ЛУКОЙЛ» за 2021 год
РЕНЕВ Дмитрий Юрьевич, ПАО «ЛУКОЙЛ»
Идентификация стальных труб нефтяного сортамента на всем жизненном цикле. Результаты испытаний
ПРЫКИНА Юлия Вячеславовна, ПАО «ТМК»МЕЛЬНИКОВ Максим Михайлович, АО «РусНИТИ»
Эффективные решения Hilong в области антикоррозионной защиты объектов нефтегазовой отрасли
ПЕТРОВ Никита Сергеевич, ООО «ТД Хайлон-Рус» / Hilong Russia
Ближайшие совещания
Отраслевая техническая Конференция
СЕРВИС-2022. Эффективный нефтесервис Российских нефтегазодобывающих компаний. Развитие отечественного технологического потенциала. Новые отраслевые вызовы
4-6 октября 2022 г., г. Когалым
Ближайшие тренинги
Семинар-практикум
Защитные антикоррозионные покрытия 2022. Эффективные методы применения защитных покрытий в нефтедобыче
25-27 октября 2022 г. , г. Самара
Тренинг-курс
Ловильный сервис на нефтяных и газовых скважинах
14-18 ноября 2022 г., г. Пермь
дифференциальный привод — английский перевод
Дифференциальный диагноз. | Differential diagnosis. |
Дифференциальный анализ? | Differential diagnosis? |
Дифференциальный диагноз. | We were friends. |
Дифференциальный диагноз, народ. | Differential diagnosis, people. Parasite. |
Дифференциальный диагноз, народ. | Differential diagnosis, people. |
Дифференциальный диагноз, народ. | So, differential diagnosis, people. |
2. Дифференциальный анализ показателей | 2. Differential analysis of indicators |
Итак, народ, дифференциальный диагноз. | So, people, differential diagnosis. What’s wrong with her? |
Дифференциальный диагноз для кончить . | Differential diagnosis for getting off. |
Дифференциальный диагноз для эякуляции. | Differential diagnosis for ejaculation. |
привод . | (nominal speed given by the manufacturer |
Привод | Method of drive |
привод . | Type . |
Привод | Alternator |
Привод . | Type . |
привод . | Type . |
привод | Alternator Make . |
Привод | Device |
Привод подразделяется на две независимые функциональные части привод управления и энергетический привод. | The transmission is divided into two independent functions |
Привод подразделяется на две независимые функциональные части привод управления и энергетический привод. | The transmission is divided into two independent functions the control transmission and the energy transmission. |
Привод подразделяется на две независимые функциональные части привод управления и энергетический привод. | The transmission is divided into two independent functions The control transmission and the energy transmission. |
привод подразделяется на две независимые функциональные части привод управления и энергетический привод. | The transmission is divided into two independent functions the control transmission and the energy transmission. |
Хочу послушать ваш дифференциальный диагноз. | I’d like to hear the differential. |
Тип Привод . | Power kW at rpm Fuel Hydraulic motor |
5.3 Привод | Transmission |
2.1 Привод | Transmission |
Ручной привод | Manual drive |
СИЛОВОЙ ПРИВОД | E ECE 324 Rev.2 Add.113 |
5.3 Привод | 5.3. Transmission |
2.1 Привод | 2.1. |
Привод DVD | DVD device |
Оптический привод | Cdrom Drive |
Оптический привод | Optical Drive |
Привод открыт | Ejected |
Экстренный привод. | Engage emergency power. |
Проверяю привод. | I’m checking the quad. |
Силовой привод! | Power drive! |
Гусеничный привод. | A caterpillar drive. |
Каков дифференциальный диагноз на подергивание кисти? | What’s the differential for a twitch in the wrist? |
Нормальный общий и дифференциальный анализ крови. | Leukemia? Normal CBC, and differential? |
Не оченьто интересный дифференциальный диагноз, но… | Not a very interesting differential, but |
Дифференциальный диагноз. Это должен быть рак. | Differential diagnosis. |
Для достижения указанной выше эффективности может использоваться привод двигателя ручной привод или автоматический привод (положение стоянки). | The engine manual transmission or the automatic transmission (park position) may be used to achieve the above performance |
2.2.6 Тормозной привод | Brake actuator |
аварийный привод руля | The rudder position indicator. |
роботов с всенаправленным приводом против роботов с дифференциальным приводом
перейти к содержанию Роботы с всенаправленным приводом против роботов с дифференциальным приводом- Посмотреть увеличенное изображение
Всенаправленный робот может двигаться в любом направлении благодаря своим всенаправленным колесам, поскольку всенаправленный привод позволяет роботу мгновенно менять направление без необходимости поворачивать колеса. Роботы Omnidrive были созданы в ответ на потребности различных областей, таких как промышленность, здравоохранение и исследования. Цель состояла в том, чтобы разработать роботизированную платформу, способную легко выполнять задачи в средах со статическими и динамическими препятствиями, а также в узких местах.
Откройте для себя автономный мобильный робот (AMR) TIAGo Base компании PAL Robotics.
Основными преимуществами всенаправленных роботов являются маневренность, быстрая установка и технология экономии местаВсенаправленный робот может двигаться в любом направлении, вперед/назад, а также вбок влево/вправо, а также поворачиваться на месте благодаря его колеса, дающие роботу всенаправленные возможности для движения по горизонтальной оси на трансмиссии, а также движения вперед и назад. Кроме того, всенаправленным роботам требуется меньше рабочего пространства из-за их компактной технологии. Всенаправленные роботы легко адаптируются, а также предназначены для быстрой установки и удаления.
Роботы Omnidrive по сравнению с роботами с дифференциальным приводом Роботы Omnidrive обладают многими преимуществами с точки зрения мобильности, в том числе способностью перемещаться в замкнутых пространствах, людных ситуациях и труднодоступных местах, а также способностью поворачиваться боком, включать замечать и следовать сложным траекториям благодаря их движению на 360º.
Кроме того, эти автомобили способны легко выполнять задачи в условиях наличия статических и динамических препятствий и узких пространств.
Робот с дифференциальным приводом представляет собой мобильный робот, движение которого основано на двух колесах с независимым приводом, расположенных по бокам корпуса робота, что позволяет роботу двигаться вперед и назад, но не в стороны. Это означает, что для достижения каждого местоположения и ориентации в двухмерном пространстве требуется больше маневров и, возможно, более сложное планирование пути.
Выбор между роботами с универсальным и дифференциальным приводом зависит от каждого применения. С одной стороны, роботы с универсальным приводом кажутся лучшим вариантом в ситуациях, требующих чрезвычайной маневренности, благодаря их универсальному движению на 360°. Система omnidrive особенно полезна при маневрировании в стесненных условиях, например, при транспортировке длинномерных грузов боком через двери стандартного размера или узкие проходы или при параллельной парковке, тогда как робот с дифференциальным приводом может совершать больше маневров, чем робот с всенаправленным приводом.
Роботы с дифференциальным приводом, с другой стороны, широко используются в робототехнике, потому что их движение просто программировать и легко контролировать. Сегодня многие потребительские роботы на рынке используют дифференциальное рулевое управление из-за его простоты. Кроме того, роботы с дифференциальным приводом — отличный выбор, когда речь идет о силе толкания. Всенаправленные колеса также требуют отдельных двигателей с регулируемой скоростью для каждого колеса.
Следите за нашим предстоящим техническим документом о роботах с всенаправленным приводом и роботах с дифференциальным приводом, чтобы узнать об этой теме более подробно.
Робот TIAGo OMNI Base компании PAL Robotics База TIAGo OMNI — это недавно разработанный компанией PAL Robotics полноприводной робот. База TIAGo OMNI оснащена всенаправленным приводом с 3 колесами Mecanum DoF и включает в себя два датчика LIDAR для беспрепятственного безопасного движения с углом обзора 360º. Это включает в себя автономную навигацию и обнаружение препятствий. TIAGo OMNI Base является частью семейства роботов TIAGo, в которое входит оригинальный автономный мобильный робот (AMR) с дифференциальным приводом TIAGo Base.
Узнайте, как TIAGo Base помогает сотрудникам MAPCABLE в их повседневной работе.
Пользователи TIAGo OMNI Base могут в полной мере воспользоваться маневренностью универсальной базы TIAGo OMNI Base для планирования маршрута. Всенаправленная база робота обеспечивает точное позиционирование даже в стесненных условиях. Именно здесь робот с всенаправленным движением кажется наиболее оптимальным предложением благодаря его универсальности движения на 360º. Таким образом, TIAGo OMNI Base предлагает следующие преимущества:
- ЭФФЕКТИВНОСТЬ: автономная навигация, обнаружение препятствий и планирование маршрута.
- ВЫСОКАЯ МАНЕВРЕННОСТЬ: четыре всенаправленных механических колеса для перемещения во всех направлениях.
- НАСТРАИВАЕМЫЙ: Вы можете настроить его с помощью аксессуаров в соответствии с вашими потребностями.
- HIGH TRACTION: Оптимальная навигация по неровным поверхностям.
Если вы хотите узнать больше о TIAGo OMNI Base, посетите наш веб-сайт, чтобы узнать больше. Если у вас есть какие-либо вопросы, не стесняйтесь обращаться к нашей команде, чтобы узнать о возможностях TIAGo OMNI Base улучшить внутреннюю логистику или исследования в вашей организации.
Если эта статья показалась вам информативной, вам следует посетить блог PAL Robotics о наших роботах и исследованиях!
Поиск:
Теги
ИИ АЛМИ Окружающая среда УПП АРИ Двуногий робот Навесы COVID-19 Десятиборье Рабочий орган проект ЕС Европейский форум робототехники Европейская неделя робототехники События Фабрика будущего Здравоохранение Как ХРИ Гуманоид ИКРА Индустрия 4.0 Интервью Интралогистика ИРОС Машинное обучение Манипуляции Памятка Мобильные манипуляции Мобильный манипулятор Навигация РЭЕМ-С Исследовательская работа Розничная торговля RFID Соревнования по робототехнике РОС ФОРМЫ Социальный робот ВЕСНА Стокбот ТАЛОС ТИАго ТИАго++ База ТИАго Вариант использования
Ссылка для загрузки страницыПерейти к началу
дифференциальный_драйв — ROS Wiki
Выпущено только в дистрибутивах EOL:
Статус документации
Документировано
Предоставляет некоторые основные инструменты для взаимодействия с дифференциальным приводом. робот с навигационным стеком ROS. Цель состоит в том, чтобы сделать это
не зависит от конкретной реализации робота.
- Автор: Джон Стефан
- Лицензия: GNU GPL3
- Источник: git https://[email protected]/p/дифференциал-драйв/ (филиал: нет)
Документировано
Предоставляет некоторые основные инструменты для взаимодействия с дифференциальным приводом. робот с навигационным стеком ROS. Цель состоит в том, чтобы сделать это не зависит от конкретной реализации робота.
- Автор: Джон Стефан
- Лицензия: GNU GPL3
- Источник: git https://[email protected]/p/дифференциальный-драйв/ (ветка: нет)
Источник Github: https:/ /github.com/jfstepha/дифференциальный привод
Содержимое
- Учебники
- Резюме
- Требования
- API РОС
- diff_tf
- Опубликованные темы
- Темы с подпиской
- Параметры
- pid_velocity
- Опубликованные темы
- Темы с подпиской
- Параметры
- твист_к_моторс
- Опубликованные темы
- Темы с подпиской
- Параметры
- виртуальный_джойстик
- Опубликованные темы
- Темы с подпиской
- Параметры
- diff_tf
- Настройка ПИД-регулятора пакета дифференциального_драйва
В этом руководстве рассматривается установка пакета дифференциального_драйва и настройка параметров ПИД-регулятора
- Взломанный робот K’nex с использованием дифференциального_драйва Взломанные учебники K’nex по коду Google.
- Установка пакета дифференциального_привода
- Настройка URDF для дифференциального_привода
Установка пакета URDF и преобразований
Когда я начал свой проект робота, я был удивлен, обнаружив, что базового пакета дифференциального привода не было. Были стеки, которые реализовывали дифференциальный привод, но они были очень тесно связаны с аппаратным драйвером. Этот пакет представляет собой попытку реализовать некоторые основные функции независимым от роботов способом.
Целью этого пакета является предоставление интерфейса для стека навигации. Он принимает поворотное сообщение из навигационного стека и предоставляет сообщения lwheel и rwheel, которые можно использовать в качестве сильных сторон драйвера двигателя. Пакет получает сообщения колесного энкодера обратно от аппаратного обеспечения и генерирует сообщения преобразования tf, требуемые навигационным стеком ROS.
См. также страницу knex-ros для примера взломанного робота K’nex.
Этот пакет содержит следующие узлы:
- diff_tf — обеспечивает преобразование base_link.
- pid_velocity — базовый ПИД-регулятор с целевой скоростью.
- twist_to_motors — преобразует поворот в две цели скорости двигателя.
- virtual_joystick — небольшой графический интерфейс для управления роботом.
На изображении ниже показано, как узлы связаны друг с другом. См. пакет knex_ros для примера реализации аппаратного привода с Arduino, а также попытку создания недорогой альтернативы лазерному сканеру.
Для пакета Differential_drive требуется следующее:
Левый и правый двигатели, которые реагируют на уровни мощности в темах lmotor и rmotor. (В настоящее время Int messages, TODO: изменить на float с параметрами для диапазона)
Предоставлять сообщения энкодера колеса на lwheel и rwheel. Эти сообщения должны представлять собой общее количество тиков, полученных для каждого колеса.
diff_tf
Опубликованные темы
odom — (nav_msgs/Odometry)
- Публикует одометрию (текущую позу и поворот) робота.
tf —
- Транслирует преобразование между кадром одометрии и base_link робота.
Темы с подпиской
lwheel (std_msgs/Int16)
rwheel (std_msgs/Int16)
- Выход левого и правого колесных энкодеров. Ожидается, что аппаратное обеспечение будет подсчитывать импульсы от колесных энкодеров и предоставлять общее количество импульсов с момента начала отслеживания.
Параметры
~rate (float, по умолчанию:10)
ticks_meter (int, по умолчанию:50)
~base_width (float, по умолчанию:0.245)
3 в метрах от колеса робота. (Расстояние между колесами)
~base_frame_id (строка, по умолчанию:»base_link»)
- Имя базовой рамы робота.
~odom_frame_id (строка, по умолчанию: «odom»)
- Имя опорной системы одометрии.
encoder_min (целое, по умолчанию: -32768)
encoder_max (целое, по умолчанию: 32768)
- Минимальное и максимальное значение, которое должен выводить энкодер. Используется для расчета одометрии, когда значения повторяются.
wheel_low_wrap (целое, по умолчанию: 0,3 * (encoder_max — encoder_min) + encoder_min
wheel_high_wrap (целое, по умолчанию: 0,7 * (encoder_max — encoder_min) + encoder_min
- next
- меньше, чем wheel_low_wrap, то показание зациклено в положительном направлении, и одометрия будет рассчитана соответствующим образом. Та же концепция применима и для отрицательного направления.0004
pid_velocity
pid_velocity — это ПИД-регулятор, использующий обратную связь от поворотного энкодера к мощности колеса для управления скоростью колеса робота. Типичная установка дифференциального привода будет иметь 2 таких ПИД-регулятора скорости, по одному на каждое колесо.
Опубликованные темы
motor_cmd (Float32)
wheel_vel (Float32)
- Текущая скорость колеса в метрах/секунду.
Темы с подпиской
колесо (Int16)
- Выход поворотного энкодера, в тиках. Предполагается, что аппаратное обеспечение подсчитывает тики, добавляя к счетчику тиков при движении вперед и вычитая из них при движении назад.
wheel_vtarget (Float32)
Параметры
~Kp (с плавающей запятой, по умолчанию: 10)
- Пропорциональное усиление ПИД-регулятора.
~Ki (с плавающей запятой, по умолчанию: 10)
- Интегральное усиление ПИД-регулятора.
~Kd (с плавающей запятой, по умолчанию: 0,001)
- Производное усиление ПИД-регулятора.
~out_min (плавающая, по умолчанию: -255)
~out_max (плавающая, по умолчанию: 255)
~скорость (плавающая, по умолчанию: 30)
~rolling_pts (плавающая, по умолчанию: 2)
~timeout_ticks (целое, по умолчанию: 2)
ticks_meter (число с плавающей запятой, по умолчанию: 20)
- Количество тактов энкодера колеса на метр. Это глобальный параметр, поскольку он будет использоваться совместно с другими узлами.
vel_threshold (плавающая, по умолчанию: 0,001)
Если скорость падает ниже vel_threshold, мы считаем, что колесо остановлено. Это необходимо, потому что технически мы никогда не можем знать, что скорость колеса равна нулю. Когда мы приближаемся к нулю метров в секунду, деления поворотного энкодера отдаляются друг от друга дальше, поэтому мы можем реально оценить верхнюю границу скорости только с момента получения последнего импульса. Если эта верхняя граница < vel_threshold, мы считаем ее равной 0,
encoder_min (целое, по умолчанию: -32768)
encoder_max (целое, по умолчанию: 32768)
- Минимальное и максимальное значение, которое должен выводить кодировщик. Используется для расчета одометрии, когда значения повторяются.
wheel_low_wrap (целое, по умолчанию: 0,3 * (encoder_max — encoder_min) + encoder_min
wheel_high_wrap (целое, по умолчанию: 0,7 * (encoder_max — encoder_min) + encoder_min
- next
- меньше, чем wheel_low_wrap, то показание зациклено в положительном направлении, и одометрия будет рассчитана соответствующим образом. Та же концепция применима и для отрицательного направления.0004
Twist_to_Motors
Twist_to_Motors преобразует сообщение Twist в сообщения целевой скорости для двух двигателей. Сообщения о целевой скорости публикуются с частотой ~rate герц до тех пор, пока принимаются твист-сообщения, а ~timeout_ticks отсчитывается после того, как сообщения прекращаются.
Опубликованные темы
lwheel_vtarget — (std_msgs/Float32)
- Целевая скорость для левого колеса (в м/с)
rwheel_vtarget — (std_msgs/Float32)
- Целевая скорость для правого колеса (в м/с)
Темы с подпиской
Twist — (geometry_msgs/Twist)
Параметры
~base_width — (float, default:0.1)
0 между колесами робота в метрах.
~rate — (целое, по умолчанию:50)
- Скорость, с которой будут публиковаться сообщения о целевой скорости на выходе (в герцах)
~timeout_ticks — (целое, по умолчанию:2)
- Количество сообщений о заданной скорости, которые будут опубликованы после получения последнего сообщения о повороте.
virtual_joystick
Этот узел делает почти то же самое, что и панель расширения RVIZ, за исключением того, что он имеет регулируемый диапазон скоростей.
Опубликованные темы
Twist (Twist)
Темы с подпиской
нет
Параметры
~publish_rate
~x_min (float, по умолчанию: -1,50)
2
~x_max (с плавающей запятой, по умолчанию: 1,50)
- Максимальная скорость для публикации (в метрах/с)
~r_min (с плавающей запятой, по умолчанию :10.0)
- Минимальная скорость вращения для публикации (в радианах/секунду)
~r_max (float, по умолчанию:10.0)
- Максимальная скорость вращения для публикации (в радианах/секунду)
DiffBot Differential Управляй мобильным роботом
В этом проекте вы узнаете, как построить автономного двухколесного робота с дифференциальным приводом. Робот может работать на Raspberry Pi 4 B или NVIDIA Jetson Nano Developer Kit.
запуск промежуточного программного обеспечения ROS Noetic или ROS Melodic на Ubuntu Mate 20.04 и Ubuntu 18.04 соответственно.
С драйвером двигателя, который приводит в действие два щеточных двигателя, робот может автономно добираться до нужного места, контролируя окружающую среду с помощью датчиков.
например, лазерный сканер для обхода препятствий и камера для обнаружения объектов. Колесные датчики одометрии (также называемые датчиками скорости)
в сочетании с инерциальным измерительным блоком (IMU) используются вместе с лазерным сканером для локализации на ранее сохраненной карте.
Невидимые объекты могут быть нанесены на карту с помощью лазерного сканера с использованием алгоритмов SLAM с открытым исходным кодом, таких как gmapping .
В следующем видео представлен обзор компонентов робота:
Проект разделен на несколько частей, посвященных следующим основным аспектам робота.
- Список материалов (BOM) и теория деталей.
- Теория (мобильных) роботов.
- Сборка платформы робота и компонентов.
- Настройка ROS (Noetic или Melodic) на Raspberry Pi 4 B или Jetson Nano, которые являются одноплатными компьютерами (SBC) и мозгом робота.
- Моделирование робота в Blender и URDF для симуляции его в Gazebo.
- пакетов и узлов ROS:
- Аппаратные драйверы для взаимодействия с аппаратными компонентами
- Узлы высокого уровня для восприятия, навигации, локализации и управления.
Используйте меню, чтобы узнать больше о пакетах ROS и других компонентах робота.
Примечание
Также возможно использование Jetson Nano вместо Raspberry Pi. Для получения более подробной информации см. раздел «Настройка Jetson Nano» в этой документации. Для запуска ROS Noetic Docker необходим.
Исходный код
Исходный код этого проекта можно найти в репозитории ros-mobile-robots/diffbot GitHub.
Робот Ремо
Вы можете найти робота Remo (Research Education Modular/Mobile Open robot), пакет описания модульного робота для 3D-печати, доступный по адресу ros-mobile-robots/remo_description. Файлы stl находятся в свободном доступе из репозитория и хранятся внутри git lfs (большая файловая система Git) на GitHub. Ограничение пропускной способности для проектов с открытым исходным кодом на GitHub составляет 1,0 ГБ в месяц. вот почему вы не сможете клонировать/извлекать файлы, потому что квота уже исчерпана в этом месяце. Для поддержки этой работы и в случае, если вам нужны файлы немедленно, вы можете получить к ним доступ по следующей ссылке:
Доступ к файлам Remo STL
Передовой опыт и REP
Проект максимально старается следовать рекомендациям ROS.
Сюда входят примеры и шаблоны создания и добавления высококачественного кода,
а также на тестирование и другие методы, ориентированные на качество, такие как непрерывная интеграция.
Подробнее об этом можно прочитать на вики ROS Quality. Это включает в себя также следование советам, данным
в предложениях по улучшению ROS (REP). В документации даны ссылки на соответствующие REP.
Руководство разработчика ROS в вики-разделе является хорошей отправной точкой для ознакомления с общими методами разработки компонентов, которыми можно поделиться с сообществом. Он включает ссылки на соглашения об именах (например, для пакетов) и руководства по стилю ROS C++ и Python.
Другим хорошим ресурсом, где можно узнать больше о передовом опыте ROS, является Лаборатория автономных систем ETH Zurich.
Примечание
Приветствуется ваш вклад в код или документацию, но, пожалуйста, старайтесь следовать упомянутым передовым методам, где это возможно.
Тестирование, отладка и CI
Рабочее пространство сережки ROS, объясняющее gTest и rostest, см. в Ros-Test-Example и его документации. Чтобы запустить тесты с помощью catkin-tools, см. раздел Создание и запуск тестов.
Чтобы получить рабочую область, позволяющую отладчику останавливаться в точках останова, необходимо создать рабочую область сережки с символами отладки. Для этого используется команда catkin build --save-config --cmake-args -DCMAKE_BUILD_TYPE=Debug , упомянутая в шпаргалке catkin-tools.
Этот репозиторий использует автоматизированные сборки, когда в репозиторий добавляется новый код или выполняется повторный запрос на извлечение. Для этого используются конфигурации действий Travis и GitHub (файлы yml) из ROS Industrial CI.
Документация
В документации используется тема дизайна материалов, основанная на MkDocs. Будущая документация по коду будет использовать doxygen и rosdoc_lite.
Ссылки
Полезные ресурсы для добавления собственных роботов в ROS:
- Понимание концепций ROS
- Следуйте руководствам по ROS, таким как Использование ROS на вашем пользовательском роботе
- Книги:
- Освоение ROS для программирования робототехники: лучшие практики и решения по устранению неполадок при работе с ROS, 3-е издание эта книга также содержит главу о Remo
- Введение в автономных роботов (бесплатная книга)
- Операционная система для роботов (ROS) для начинающих от Apress Лентина Джозефа
- Программирование роботов с помощью ROS Практическое введение в операционную систему роботов от O’Reilly Media
- Mastering ROS for Robotics Programming Второе издание из Packt
- Элементы робототехники Роботы и их приложения от Springer
- ROS Книга по программированию роботов бесплатно! Справочник от Robotis, написанный разработчиками Turtlebot3
- Курсы:
- Робокадемия
- Онлайн-курс ROS для начинающих
- Инженер-программист Udacity Robotics
- Самоуправляемые автомобили с Duckietown от ETH Zurich
Читать журналы GJRE
(Пожалуйста, подождите, показ может занять несколько секунд)
Опубликуйте у нас видео
Если картинка стоит тысячи слов, то видео стоит миллиона.
Транслируйте свои исследования в видеоформате бесплатно.Узнайте больше и отправьте свое видео
Организуйте конференцию вместе с нами
Давайте делать по-крупному. Организуйте, сотрудничайте и спонсируйте предстоящие семинары, семинары, симпозиумы, конференции и вебинары.
Contact Evangelist
Доступ к инфраструктуре научного сообщества
- Используйте нашу стандартную облачную инфраструктуру для проведения исследований.
- Получите доступ к соответствующим спонсорам исследовательского проекта.
- Автоматизированные инструменты позволяют нам сотрудничать и проверять вашу рукопись и ссылки во время процесса создания в облаке.
Отправьте свой проект
Резервуар знаний диссертаций и электронных книг
Опубликуйте у нас свою электронную книгу, диссертацию/диссертацию.
Наша служба публикации электронных книг с открытым доступом позволяет авторам совместно с нами редактировать рукопись.Подать диссертацию Подать электронную книгу
Подписка на журналы
Блог социальных инноваций
Биолокация их «жизненной энергии и лун» 9-х планет0013 Глобальные журналы | Блог о социальных инновациях и историях
Обзор моей последней статьи и доступ к блогу в Google Cloud Автор: Джон Ф. Кэдди, доктор философии. прошлая продуктивность[…]
Подробнее…Краткий обзор «Исследование осуществимости теорий художественного перевода Сюй Юаньчуна и его открытий»
Global Journals | Блог о социальных инновациях и историяхАвтор: Fangfang Tan * Шанхайский педагогический университет, КНР. Эта статья состоит из пяти частей. Первая часть служит введением к блестящим достижениям профессора Сюй в области перевода. Он известен как первый человек, переведший классический китайский[…]
Подробнее. ..Разум и будущее нации-государства
Глобальные журналы | Блог социальных инноваций и историйБлог. Хосе Луис Техеда Гонсалес. Статья, опубликованная в Global Journal под названием «Разум и будущее национального государства», была сделана в рамках расширения глобализации и кризиса национальных государств. Все указывало бы на то, что регионализация и[…]
Подробнее…«Пустые места» в структуре современных культурных ландшафтов: идентификация ради социально-экономической стабильности
Глобальные журналы | Блог о социальных инновациях и историяхАвтор: Т.М. КрасовскаяЭто мой первый опыт публикаций в Global Journals. Это оказалось успешным. Доволен контактами с редакцией и техническими отделами. Также это мой первый опыт блогерской деятельности – №[…]
Подробнее…Семейные корни моего интереса к изучению критических ситуаций и участие в них волонтера
Global Journals | Блог Social Innovations & StoriesАвтор: проф.
Подробнее… Олег ЯницкийКонечно, это в некоторой степени преувеличение, но тем не менее это правда. Так уж получилось, что мое детство совпало с длинной чередой удушающих событий и радикальных преобразований в России. Основной была Великая Отечественная война, и[…]
Introducing
Global Journals eBooks
and Thesis
Publication Service
Get Started
Recent Articles Published in GJHSS-G
Cinco Rimas Fantasmales de Gustavo Adolfo Bécquer
Observing how a specific Тема, возникающая в творчестве поэта, ведет к лучшему пониманию стилистической техники и лучшему пониманию человеческого опыта. В этой статье мы изучаем поэзию Густаво Адольфо Беккера, чтобы понять, как страсть любовника трансформируется в автономную сущность, путешествующую в пространстве. Актуальн…
Прочитать документ
Тело, здоровье и общество: социоантропологические соображения
Этот текст представляет собой социологическое размышление о биомедицинском дискурсе тела и здоровья в нашем обществе. Мы предлагаем обратиться к социологическим, антропологическим и историческим исследованиям тела, здоровья, болезни и научной области здоровья. Цель состоит в том, чтобы обеспечить обсуждение процессов медикализации общества и социальных …
Read Paper
Трудоустройство и профессиональный профиль по навыкам в период изменений на рынке труда
Целью исследования было проанализировать взаимосвязь между профессиональным профилем по навыкам и возможностью трудоустройства в условиях изменений, произошедших на рынке труда в период пандемии COVID-19, эти связанные переменные структурируют перспективу образовательной реальности и ожидания в развитии и экономике страны. Образец…
Read Paper
Статьи в прессе
Изучение различий между неологизмами и орфографическими ошибками в социальных сетях
Неологизмы и орфографические ошибки являются обычным явлением в социальных сетях и внесли огромный вклад в облегчение распространения информации в современном мире. Появление Интернета способствовало языковому прогрессу, языковым странностям и общению. Являясь развивающимся явлением, язык предоставляет своим пользователям свободу использовать его по своему усмотрению для…
Социальные сети и троллинг мемов: влияние троллинга с помощью мемов в Кашмире
Мемы стали неотъемлемой частью повседневной жизни. Рост культуры мемов дал людям замечательное пространство для троллинга других в социальных сетях, таких как Twitter, Facebook и Instagram. В этой статье будет проанализировано влияние троллинга через мемы на молодежь Кашмира. Вот почему мем-страницы стали богатым источником новостей для молодежи. Мем…
Ислам и современность: трудности в отношениях или дилемма отсутствия?
Писания и взгляды на ислам и современность различались. Есть те, кто считает, что ислам имеет свою современность, которая в некоторых аспектах соответствует современности Запада, и есть те, кто утверждает, что ислам превосходит западную современность. В целом существуют две тенденции: отделение ислама от современности и связь между исламом и …
Использование рассказов о болезни в физиотерапии, медицине и питании студентов: инновационный опыт в университете Сан-Паулу
С целью консолидации реализации Национальных руководящих принципов учебной программы в области здравоохранения в университете, расположенном в городе Сан-Паулу, был задуман инновационный проект, предусматривающий высшие курсы физиотерапии, медицины и питания. Это качественное исследование выявляет представления участвующих студентов о…
Towards Analyzing Violent Contesting for Power in Mali, 2012 – 2021
Это исследование направлено на анализ динамики кризиса в Мали в период с 2012 по 2021 год. в зависимости от того, была принята оценочная методика выборки. Вторичный источник (книги, журнальные статьи, интернет-материалы и монографии) был получен из нигерийских библиотек и Интернета; подвергается контент-анализу, перед квали…
Статьи в обзоре
Доступность ресурсов для эффективного внедрения учебных программ по общественным наукам в неполных средних школах
. ..
Гендерное впечатление от нехватки воды: влияние нехватки воды на жизнь женщин с гендерной точки зрения
…
44 RevistaEspinhaço, 2016, 5(2): 44-53. Химические, минералогические и физические характеристики материала, скопившегося на берегу реки в результате схода селей в результате обрушения дамбы хвостохранилища железной руды в Бенту-Родригес, штат Минас-Жерайс, Бразилия
Прорыв дамбы хвостохранилища итабирито в истоках бассейна реки Досе (Минас-Жерайс и Эспириту-Санту, Бразилия) вызвал крупнейшую экологическую катастрофу на планете Земля, связанную с этой деятельностью. Хвосты откладывались как на дне, так и на приречной террасе рек, вызывая заиление и глубокие изменения…
ФАКТОРЫ, ВЛИЯЮЩИЕ НА ВЫБОР ЧАСТНЫХ МЕДИЦИНСКИХ УЧРЕЖДЕНИЙ В УГАНДЕ
…
Когда человек играл в жизнь Бог Опасности искусственного интеллекта
В этом эссе анализируются опасности, которые разработка и использование искусственного интеллекта может принести человечеству, пытаясь обобщить его предысторию и исходя из анализа, проведенного в этом отношении различными теоретиками и исследователями. В дополнение к предложениям решений, которые могли бы смягчить или устранить опас…
США Регистрационный номер: 0423089 | Идентификатор членства OARS: 4636/AO | Идентификационный номер налогоплательщика США (Emp. ID): 098-0673227 | Лицензия №: 42125/022010/1186 | Рег. №: 430374 | Импорт-экспорт: 110
27
Группа, сертифицированная по стандарту ISO 9001:2005. Global Journals Logo® является зарегистрированным товарным знаком Global Journals Incorporated и Global Journals Private Limited. Патенты на корпоративные исследования находятся на рассмотрении. Авторские права © Global Journals, 2016 г. Лицензия Creative Commons. Журналы открытого доступа от Global Journals находятся под лицензией Creative Commons Attribution 4.0 International License.
Как создать симуляцию дифференциального привода
Из этого поста вы узнаете:
- Как построить простую симуляцию дифференциального привода в симуляторе Gazebo.
- Как добавить в модель плагин, чтобы разрешить роботу команды ROS
- Как перемещать робота по темам ROS
Для этого вам нужно скачать этот файл, который содержит базовую структуру для запуска.
Мы собираемся показать вам, как это сделать внутри The Construct, но почти все напрямую применимо к Gazebo, работающему автономно на вашем компьютере. Если есть различия в действиях по применению, вы получите дополнительные инструкции, выделенные синим цветом на автономная беседка (sG) .
Настройка с помощью zip-файлаЗагрузите zip-файл (как есть, без распаковки) в свою учетную запись в The Construct . Если у вас его нет, вы можете создать бесплатную учетную запись здесь.
Если вы используете sG, распакуйте zip-файл в каталоге, который находится в вашем ROS_PACKAGE_PATH внутри активного рабочего пространства ROS.
Запустите симулятор в The Construct . Мы запускаем Gazebo 4.0 с ROS Indigo, но пример, который мы предоставили в zip-файле, должен работать с любой другой версией симулятора или ROS. Как только симулятор запустится, вы увидите просто пустой мир. Вы должны откройте интегрированную среду разработки The Construct (нажмите кнопку IDE), чтобы иметь возможность редактировать файлы. Вы должны увидеть что-то вроде этого:
Для sG просто введите roslaunch diff_drive_gazebo main.launch на терминале, чтобы открыть пустой мир в Gazebo. Затем откройте предпочтительный редактор, чтобы создать файлы модели, как описано ниже.
Структура файловКак видите, zip-файл содержит несколько файлов и каталогов. Структура этих файлов и каталогов указана Gazebo в этой ссылке и должна соблюдаться для оптимальной производительности. Для Конструкция , эта структура является обязательной.
Наш робот будет определен как модель . Модель должна быть помещена в каталог diff_drive_gazebo/models . Затем мы поместим эту модель в пустой мир, используя соответствующий файл запуска.
Для создания модели необходима следующая структура каталогов:
your_model : каталог для your_model
▪ model.config : метаданные о your_model
▪ model.sdf : SDF описание модели
▪ meshes : Каталог для всех файлов COLLADA и STL
▪ текстуры : Каталог для файлов изображений (jpg, png и т.д.).
▪ scripts : Каталог для скриптов материалов OGRE
▪ plugins : Каталог для исходных файлов плагинов и файлов заголовков
Если вы откроете diff_drive_gazebo/models вы увидите, что мы создали для вас каталог с моделью diffdrive с именем . Эта модель пуста, и ее необходимо заполнить файлами, описанными выше, чтобы создать модель робота с дифференциальным приводом. На сегодняшнем примере мы объясним, как создать файлы model. config и model.sdf , которые являются единственными обязательными файлами для описания модели. Остальное — материал для другого вебинара.
Перейдите к diff_drive_gazebo/models. Теперь создайте новый файл с именем model.config. Этот файл содержит данные о модели, например, что об этой модели, кто ее сделал и т. д. в формате XML. Он предназначен только для информационных целей .
Откройте файл и напишите следующий код:
diffdrive
1.0
model.sdf
Ваше имя
your@ email.address
Простой дифференциальный робот с подключаемым модулем управления ROS
Сохраните файл и создайте новый файл с именем model. sdf.
Файл model.sdf содержит описание робота в формате SDF . Если вы хотите узнать больше об этом формате, посетите этот веб-сайт.
Запишите базовую структуру файла следующим образом:
false
Описание модели робота должно быть размещено между тегами
Робот состоит из набора ссылок. С помощью тега мы будем включать каждую из частей робота, а также описывать отношения между ними.
Добавление шассиДавайте сначала создадим основу робота в виде небольшой коробки. Мы назовем ее шасси . Добавьте следующий код после тега .
0 0 0,1 0 0 0
<инерционный> <масса>10,00.0 0 0.1 0 0 0 <инерция>0,5 1. 0,1 <имя столкновения='коллизия'> <геометрия> <коробка> <размер>.4 .2 .1
<поза>0 0 0.0 0 0 0 <геометрия> <коробка> <размер>.4 .2 .1
Это первая ссылка. Вы можете видеть, что он состоит из трех дифференцированных частей:
- тег
- Тег
- и тег
и точно такие же (коробка), но это не обязательно. На самом деле очень часто визуальный аспект является более подробным, чем модель коллизии, потому что вычисление визуального элемента обходится дешевле, чем коллизии.
Нам нужно добавить самоустанавливающееся колесо, чтобы обеспечить устойчивость робота. В противном случае он упадет вперед к полу.
Мы можем смоделировать самоустанавливающееся колесо как сферу, прикрепленную к шасси с очень низким коэффициентом трения. Эта сфера не будет вращаться в симуляции, как в реальной жизни, но ее поведение достаточно близко к реальному заклинателю.
Поскольку мы хотим, чтобы это было частью структуры шасси, мы должны включить теги
<имя столкновения = 'caster_collision'>-0,15 0 -0,05 0 0 0 <геометрия> <сфера> <радиус>.05
<поверхность> <трение> <ода> <му>00 1. 1.0
<визуальное имя='caster_visual'>-0,15 0 -0,05 0 0 0 <геометрия> <сфера> <радиус>.05
В этот момент вы можете посмотреть, как продвигается ваша модель. Нажмите кнопку Перезапустить , чтобы увидеть результат. В sG нужно закрыть текущую пустую симуляцию и снова сделать roslaunch .
Добавление колес дифференциала Мы собираемся добавить два колеса, с левой и правой стороны шасси . Мы моделируем колеса в виде цилиндров радиусом 0,1 м. Скопируйте следующий код после шасси. Опять же, вы можете увидеть теги
0,1 0,13 0,1 0 1,5707 1,5707 <имя столкновения="столкновение"> <геометрия> <цилиндр> <радиус>.
0,1 -0,13 0,1 0 1,5707 1,5707 <имя столкновения="столкновение"> <геометрия> <цилиндр> <радиус>.1 <длина>.05 <визуальное имя="визуальное"> <геометрия> <цилиндр> <радиус>.1 <длина>.05
В дополнение к тегам
<тип шарнира="revolute" name="left_wheel_hinge">0 0 -0,03 0 0 0 <ребенок>левое_колесошасси <ось>0 1 0
<тип соединения = "революция" имя = "правое_колесо_шарнир"> <поза>0 0 0,03 0 0 0 <ребенок>правое_колесошасси <ось>0 1 0
Теперь посмотрите, как продвигается ваша модель. Нажмите кнопку Перезапустить , чтобы увидеть результат. В sG нужно закрыть текущую пустую симуляцию и снова сделать roslaunch .
Как вы убедились, ваш робот теперь готов, но ему необходимо интегрировать некоторый код , который позволяет перемещать робота и управлять им из программ ROS . Это возможно только с помощью плагинов. Вы можете узнать, как создавать плагины для ваших роботов по этой ссылке.
К счастью, сегодня для наших целей мы можем использовать уже готовый плагин для управления роботом ( libgazebo_ros_diff_drive.so ). Это плагин, включенный в установку пакетов ROS для Gazebo. Чтобы включить плагин в робота, добавьте следующий код после последнего тега .
<имя плагина = "Differential_drive_controller" имя файла = "libgazebo_ros_diff_drive.so">true 20 left_wheel_hinge правый_колесо_шарнир 0,4 <диаметр колеса>0,1 <крутящий момент>20cmd_vel одом одом base_footprint
Этот плагин имеет некоторые параметры, которые вы можете настроить. Они очень просты, поэтому мы не будем их описывать. Просто примите их во внимание, если вам нужно использовать этот плагин с другим роботом.
Перезапустите симуляцию еще раз, чтобы учесть код плагина. Нажмите кнопку Relaunch в The Construct, чтобы увидеть результат. В sG нужно закрыть текущую пустую симуляцию и снова сделать roslaunch .
Перемещение робота с помощью ROSТеперь ваш робот готов к перемещению с помощью ROS.
В Construct откройте веб-оболочку. В SG откройте терминал. Затем введите:
> rostopic list
Вы должны увидеть список всех доступных тем ROS. Одним из них является тема /cmd_vel . Это тема , используемая для отправки команд колесам . В этой теме от вас требуется отправить 90 527 геометрических_msgs/Twist сообщений. Чтобы заставить робота двигаться, введите следующее:
> rostopic pub /cmd_vel геометрия_msgs/Twist "linear:
x: 0,1
Y: 0,0
Z: 0,0
Угловая:
x: 0,0
Y: 0,0
Z: 0,0 ”
66. . Нажмите Ctrl-C и остановите робота.
Теперь мы собираемся переместить робота с помощью клавиатуры . Для этого мы включили в скачанный выше пакет специальный файл запуска, который позволяет использовать клавиатуру для управления роботом. Чтобы вызвать этот файл запуска, введите следующее на Web Shell :
> roslaunch diff_drive_gazebo keyboard_teleop.launch
Теперь вы можете нажимать клавиши, как показано на экране, и наблюдать за движением вашего робота.
ЗаключениеМы предоставили вам очень простой пример моделирования дифференциального привода, который перемещается с использованием интерфейса ROS. Вы можете использовать этот пример и его файлы в качестве шаблона для более сложных роботов и сред.
Кредиты:
Дифференциальный привод Изображение благодаря блогу Guilherme Martins
Понимание дифференциального привода спросил
Изменено 4 года, 8 месяцев назад
Просмотрено 2к раз
$\begingroup$
Я новичок в робототехнике и только что столкнулся с концепциями дифференциального и рулевого управления. Я еще не очень ясно их понимаю.
Я нашел следующую запись, описывающую дифференциальный привод следующим образом:
Если угловые скорости идентичны с точки зрения обоих значений и направлении, т. е. если оба колеса движутся с одинаковой скоростью и в том же направлении (по часовой стрелке или против часовой стрелки), то робот имеет тенденцию вращаться вокруг своей вертикальной оси. Эта возможность полного поворота является одним из самых больших преимуществ робота с дифференциальным приводом (он же поворот с нулевым радиусом).
Будучи полным новичком, я допускаю, что могу быть совершенно не прав, не соглашаясь с вышесказанным. Я просто предполагаю, что «оба колеса», движущиеся с одинаковой скоростью и направлением (по часовой стрелке или против часовой стрелки), означают, что робот движется линейно, то есть прямо вперед. Я не понимаю, почему автор говорит, что робот на самом деле вращается вокруг своей оси Z.
Если я ошибаюсь, объясните, что я упускаю.
И, пожалуйста, дайте мне ссылки на материалы, которые помогут мне понять дифференциал и рулевой привод.
Заранее спасибо.
- дифференциальный привод
$\endgroup$
$\begingroup$
Ответ очень прост;
Рулевое управление — это то, что вы знаете из автомобиля, в котором один двигатель приводит в движение оба колеса (переднее или заднее), а затем рулевое управление достигается за счет поворота передних колес вправо или влево.
Дифференциальный привод означает наличие двух двигателей, один из которых приводит в движение все колеса (или гусеницу) с правой стороны, а другой — все колеса с левой стороны. одна сторона автомобиля поворачивается быстрее, чем другая сторона, заставляя автомобиль поворачиваться в сторону, противоположную колесам, вращающимся быстрее. так работает танк.
Одним из больших преимуществ дифференциального привода, как вы сказали, является то, что он может вращаться вокруг своей оси (оси Z), если колеса вращаются в противоположном направлении, что позволяет ему поворачиваться на месте. это невозможно с управляемым приводом, потому что вы должны двигаться вперед, чтобы повернуть.
$\endgroup$
$\begingroup$
Ваши инстинкты верны, если вы говорите о вращении обоих колес вперед (или назад) с одинаковой скоростью вращения. В этом случае робот будет двигаться линейно вперед (или назад), как вы описываете. Рисунки по ссылке, которую вы предоставляете, похоже, подтверждают это. Однако этот анализ отличается от того, что описывает текст.
Я думаю, что проблема, с которой вы столкнулись, связана с текстом, описывающим вращение каждого колеса как по часовой стрелке, так и против часовой стрелки. Кажется, в тексте описывается ситуация, в которой вы определяете ось $\hat{z}$ каждого колеса как начинающуюся в центре оси, соединяющей два колеса. Также определите ось $\hat{z}$ каждого колеса с положительным направлением, проходящим через центр колеса. Другими словами, оба колеса будут вращаться вокруг оси, параллельной оси, но ось вращения левого колеса будет противоположна по направлению оси вращения правого колеса.