Коленчатый вал двигателя внутреннего сгорания: устройство, назначение, принцип работы
Коленчатый вал (коленвал) двигателя – это одна из важных деталей КШМ, расположенная в цилиндровом блоке. Вал преобразует поступательные движения поршней во вращательный момент, который через трансмиссию передается на колеса автомобиля.
Устройство коленчатого вала
Сложная конструкция коленвала представлена в виде расположенных по одной оси колен – шатунных шеек, соединенных специальными щеками. При этом количество колен зависит от числа, формы и месторасположения цилиндров, а также тактности двигателя автомобиля. С помощью шатунов шейки соединяются с поршнями, совершающими поступательно-возвратные движения.
В зависимости от расположения коренных шеек коленвал может быть:
полноопорным – когда коренные шейки расположены по две стороны от шатунной шейки;
неполноопорным – когда коренные шейки расположены только по одну из сторон от шатунной шейки.
В большинстве современных автомобильных двигателей применяются полноопорные коленвалы.
Итак, основными элементами коленвала являются:
Коренная шейка – основная часть вала, которая размещается на коренных вкладышах (подшипниках), находящихся в картере.
Шатунная шейка – деталь, соединяющая коленвал с шатунами. При этом смазка шатунных механизмов осуществляется благодаря наличию специальных масляных каналов. Шатунные шейки в отличие от коренных шеек всегда смещены в стороны.
Щеки – детали, соединяющие два типа шеек – коренные и шатунные.
Противовесы – детали, которые предназначены для уравновешивания веса поршней и шатунов.
Фронтальная (передняя) часть или носок – часть механизма, оснащенная колесом с зубцами (шкивом) и шестерней, в некоторых случаях гасителем крутильных колебаний, который осуществляет контроль над мощностью привода ГРМ (газораспределительного механизма), а также других механизмов устройства.
Тыльная (задняя) часть или хвостовик – часть механизма, соединенная с маховиком при помощи маслоотражающего гребня и маслосгонной резьбы, осуществляет отбор мощности вала.
Фронтальная и тыльная сторона коленчатого вала уплотняется защитными сальниками, которые препятствуют протеканию масла там, где выступающие части маховика выходят за пределы блока цилиндров.
Вращательные движения всего механизма коленвала обеспечивают подшипники скольжения – тонкие стальные вкладыши, с защитным слоем антифрикционного вещества. Для предотвращения осевого смещения вала, применяется упорный подшипник, установленный на коренной шейке (крайней или средней).
Коленвал двигателя изготавливается из износостойкой стали (легированной или углеродистой) или модифицированного чугуна, методом штамповки или литья.
Принцип действия коленчатого вала
Несмотря на сложность самого устройства, принцип работы коленвала достаточно прост.
В камерах сгорания происходит процесс сжигания поступившего туда топлива и выделения газов. Расширяясь, газы воздействуют на поршни, совершающие поступательные движения. Поршни передают механическую энергию шатунам, соединенным с ними втулкой или поршневым пальцем.
Шатун в свою очередь соединен с шейкой коленвала подшипником, вследствие чего каждое поступательное поршневое движение преобразуется во вращательное движение вала. После того как происходит разворот на 180˚, шатунная шейка движется уже в обратном направлении, обеспечивая возвратное движение поршня. Затем циклы повторяются.
Процесс смазки коленчатого вала
Смазка коленвала обеспечивается за счет шатунных и коренных шеек. Важно помнить, что смазка коленчатого вала всегда происходит под давлением. Каждая коренная шейка обеспечена индивидуальным подводом масла от общей смазочной системы. Поступившее масло попадает на шатунные шейки по специальным каналам, расположенным в коренных шейках.
Устройство коленвала | AUTO-GL.ru
Коленчатый вал — ключевой узел кривошипно-шатунного механизма двигателя внутреннего сгорания. Благодаря коленвалу возвратно-поступательные движения поршней преобразуются в механическое вращение. Суть коленвала — это кривошип, который совершает вращательные движения вокруг одной неподвижной оси. Удвоенный радиус кривошипа равен длине хода поршня. Шатунные шейки расположены под такими углами, что цилиндры работают попарно, но немного опережают друг друга. По такому принципу устроен коленчатый вал.
Кривошипно-шатунный механизм
Изготавливают коленвалы из высокопрочных сталей или чугуна методом литья, ковки, механической обработки. По причине высокой степени сжатия к коленвалу дизельного двигателя предъявляют более высокие требования по прочности. В остальном коленвал дизеля по строению не отличается от вала бензинового двигателя. Коленчатый вал из стали, особенно выточенный на станке, имеет высокую стоимость, поэтому чугунные коленвалы получили более широкое распространение.
Изготовление коленвала из стали на токарно-фрейзерном станке
Коленчатый вал состоит из плоских проточенных пластин с противовесами (так называемых «щек»), которые соединены между собой «шейками». Противовесы необходимы, чтобы гасить возвратно-поступательные движения поршней и стабилизировать вращение вала.
На некоторых современных двигателях для дополнительной стабилизации применяются балансирные валы со смещенным центром тяжести и приводом от коленчатого вала. Они вращаются в разные стороны, помогая уравновешивать движения поршней.
Кривошипно-шатунный механизм с дополнительным блоком балансиров
В V-образных и W-образных двигателях шатуны из противоположных цилиндров давят на соединенные между собой шейки. Это позволяет обеспечить более равномерную работу двигателя, уменьшить его габариты. В рядных двигателях каждый шатун закреплен на отдельной шейке с балансирами.
Кривошипно-шатунный механизм рядного четырехцилиндрового двигателя со стандартными шейками и балансирамиКоленчатый вал двигателя V6 c раздвоенной смежной шатунной шейкой
Шейки коленвала имеют цилиндрическую форму с шлифованной поверхностью. По оси вала располагаются коренные шейки, по оси шатунов — «шатунные шейки». Трущиеся пары коленвала, как правило, устанавливаются на подшипниках скольжения. Для предотвращения продольных смещений вала предусмотрены опорные подшипники, их также называют полукольца коленвала.
Коленчатый вал расположен в блоке цилиндров в ответных посадочных местах «постели коленвала». На коленчатом валу расположен хвостовик для крепежа звездочки привода ГРМ, шкива генератора и водяной помпы. На обратной части вала закреплен фланец для крепежа маховика. Во фланце устанавливается подшипник качения, в него заходит первичный вал КПП. Внутри коленчатых валов расположены каналы для принудительной смазки вкладышей шеек, шатунов и цилиндропоршневой группы. Конструктивное исполнение коленчатых валов зависит от компоновки цилиндров, их количества. На коленвал могут устанавливаться ведущие шестерни для различного оборудования, например, маслонасоса.
Как правило, первое, с чем сталкиваются автомобилисты, — это течь масла из-под резиновых уплотнений (сальников коленвала). Это широко распространенная проблема на двигателях с пробегом. Подтекающий сальник требует замены. В некоторых случаях замена масла на более вязкое поможет остановить течь на какое-то время.
Сальник коленвала требующий замены
Для коленчатых валов, как и для других деталей двигателя, наиболее опасно «масляное голодание». Причиной может быть поломка маслонасоса, забитый канал подачи масла, низкий уровень масла в двигателе. Это приводит к повышенному трению подшипников, нагреванию элементов. Дальнейшая эксплуатация двигателя в таком режиме приведет к его перегреву, полному заклиниванию и к капитальному ремонту. «Клин» на ходу может привести к критическим повреждениям вала или других узлов двигателя.
Вода и топливо попадая в масло меняют его хим. состав и степень вязкости. Причиной может быть значительный износ цилиндропоршневой группы, нарушенная структура прокладок, микротрещины в блоке двигателя или ГБЦ.
Повреждения шейки шатуна по причине отсутствия смазки
Со временем шейки и подшипники подвергаются износу, увеличивается допустимый зазор, появляется люфт коленвала, это приводит к возрастанию вибраций, двигатель начинает «стучать». Характерный стук двигателя — критичный сигнал. При его появлении необходимо прекратить движение и срочно обратиться в автосервис. Если коленчатый вал разбалансирован или смонтирован неправильно, может возникнуть повышенный ненормальный износ контактных поверхностей.
Ремонт коленвала
Ремонт или замена коленчатого вала — процесс трудоемкий. Как правило, он требует практически полной разборки двигателя, осмотра и дефектовки всех его узлов и механизмов. Коленчатый вал снимают и измеряют осевые биения. В случае допустимой выработки поверхности шеек и шатунов коленчатого вала пришлифовывают под ремонтные размеры подшипников. Постель с выработкой тоже подлежит механической обработке с «одной установкой» на специальном станке. Расточка коленвала позволяет установить вкладыш следующего ремонтного размера.
Размеры шеек имеют ремонтные допуски. Простая шлифовка коленвала не поможет в случае, если износ или повреждения слишком сильные. Коленчатый вал — деталь недешевая, а если речь идет, например, о крупногабаритной сельхозтехнике, сумма будет внушительной. Даже сильно изношенные поверхности трения можно восстановить. Толщина выработки компенсируется с помощью наплавки электросваркой под флюсом, плазменного напыления твердых сплавов, газотермичекого напыления и др. Затем коленвал шлифуется, «доводится» до необходимых ремонтных размеров. Это технологически сложный процесс, его лучше доверить специалистам.
Автоматизированное газо-термическое напыление шеек и балансиров коленчатого вала
Качественно выполненное восстановление и шлифовка коленвала может обеспечить 100% ресурса его работы. Следует учитывать, что с увеличением ремонтного размера коленчатый вал может сместиться со своего заводского посадочного места. Потребуется точная установка коленвала с подборкой вкладышей. Коленвал с критическими повреждениями или осевым искривлением придется поменять.
Как проверить коленвал? Опытные автомобилисты могут определить характерный стук коленчатого вала на слух, используя медицинский стетоскоп. При плановых ТО можно снять поддон, визуально осмотреть коленчатый вал на предмет трещин и сколов и с помощью щупа выполнить контроль зазоров между полукольцами.
Замер осевых смещений коленвала с помощью щупаКомплект измерительных стальных пластин щупов
Повышенное содержание металлической стружки в фильтре и поддоне указывает на износ пар трения. В таких случаях нужно срочно найти причину образования такой стружки.
Диаметр шеек коленвала можно измерить обычным микрометром. Параметры разбалансировки, биений и осевых люфтов коленчатых валов определяют с помощью специальных индикаторов. Для этого нужно либо разместить вал на специальный стенд или станок, либо установить индикатор с магнитным штативом на блок двигателя. Замер выполняется при вращении.
Стенд с установленным индикатором часового типа для замера биений коленчатого валаИндикатор часового типа, установленный на блок двигателя
Для определения зазора между шейками коленчатого вала и подшипниками применяют калиброванную пластиковую проволоку и бумажный шаблон со специальной шкалой. Способ довольно прост и доступен. Кусочек проволоки устанавливают на обезжиренную поверхность шейки коленчатого вала. Для ее фиксации можно применить небольшое количество густой смазки. Затем шейка накрывается подшипником и крышкой. Крышки обтягиваются, проволока внутри раздавливается на плоскости шейки (резьбовые соединения нужно затягивать динамометрическим ключом). Болты раскручивают и снимают крышку. Далее остается измерить ширину расплющенной полоски шаблоном. Значение будет соответствовать достаточно точному значению зазора.
Измерение зазоров между шейкой и подшипником с помощью калиброванной проволоки и шаблона
Замена коленвала
Итак, как снять коленвал? Для этого потребуется полная разборка двигателя.
Для замены необходимо:
стандартный набор инструментов;
динамометрический ключ;
фиксатор коленвала MR 1-233.
Снятие коленвала возможно выполнить после демонтажа двигателя и установки его на ремонтный стенд, узлов ГРМ, оборудования двигателя, ГБЦ, шатунов и поршней.
Схема сборки и установки в блок двигателя коленчатого вала Skoda OCTAVIA TDI 1996-2002 г.в 1,9,1315,17 — болты крепежные, 3 — фланец, передний прижимной, 4 — вкладыш подшипника, 5 — звездочка цепной передачи, 6 — коленчатый вал, 7 — вкладыш подшипника, 8 — полукольца коленвала, 10 — крышка подшипника, 11 — установочный штифт, 12 — колесо датчика, 2 — уплотнительное кольцо (сальник), 14 — маховик и ведущий диск, 16 — промежуточная пластина, 18 — уплотнительная прокладка (с сальником).
Последовательность работ по замене коленчатого вала
1. На «венец» маховика установить фиксатор коленвала MP 1-223 (он будет препятствовать вращению коленвала). Положение А для затяжки, В — для ослабления.
8. Установку коленчатого вала выполнить в последовательности, обратной разборке. При монтаже колеса положения коленвала выполнить контроль размера превышения установочного штифта 11 согласно со схемой проверки.
Схема проверки установочного штифта 1-колесо положения коленвала, 2-болты крепежа,3- установочный штифт а = 2,5…3,0 мм
9. После монтажа коленчатого вала в блок двигателя произвести контроль биений.
Существует целый ряд концепций двигателей внутреннего сгорания, в которых коленчатый вал и шатуны заменены на другие узлы. На сегодняшний день коленчатый вал со стандартной компоновкой оптимально подходит для крупносерийного производства, а «безшатунные» двигатели — единичные экспериментальные экземпляры.
Как устроен и для чего служит кривошипно-шатунный механизм? 7 основных неисправностей, которые могут возникнуть в его работе
Если у вас есть автомобиль, то с вероятностью 99.99%, в нём есть кривошипно-шатунный механизм (КШМ). Его нет только в «чистых» электромобилях, а также автомобилях с роторно-поршневым двигателем, а также в газотурбинных двигателях. Все остальные автомобильные двигатели внутреннего сгорания построены именно на базе КШМ, и неважно, дизельные они или бензиновые. Данная система передаёт энергию горения рабочей смеси через коленчатый вал и далее трансмиссию на колёса автомобиля, преобразуя возвратно-поступательное (туда и обратно) движение поршней в цилиндрах мотора во вращательное движение коленчатого вала.
Содержание статьи
Устройство механизма
Классический кривошипно-шатунный механизм был известен ещё в Древнем Риме. Использовался похожий принцип в Римской пилораме, только там вращение, под воздействием течения реки, водяного колеса превращалось в возвратно-поступательное движение пилы.
В паровых машинах также использовался КШМ, похожий на использующийся сейчас в автомобильных двигателях внутреннего сгорания (ДВС). Только в нём поршень был соединён с шатуном через шток и цилиндр низкого давления. Схожая конструкция используется иногда в ДВС и по сей день.
В так называемых крейцкопфных двигателях поршень жёстко соединён с крейцкопфом – деталью, движущейся по неподвижным направляющим в одном измерении, как и поршень, через шток, а далее по привычной схеме – шатун с коленвалом. Это позволяет увеличить рабочий ход поршня, а иногда делает цилиндр двусторонним, в таких конструкциях добавлена ещё одна камера сгорания. Такой тип КШМ применяется чаще всего в судовых дизелях и другой крупной технике.
Кривошипно-шатунный механизм состоит из двух основных групп деталей – подвижных и неподвижных:
К подвижным частям КШМ относятся следующие детали: поршни, которые вместе с кольцами и пальцами объединены в поршневую группу, шатуны, коленчатый вал (в просторечном сокращении — коленвал), подшипники коленвала и маховик.
Неподвижные – это картер, объединённый с блоком цилиндров, гильзы цилиндров, головка блока цилиндров. Также к ним относятся поддон (нижний картер), полукольца коленвала, картер маховика и сцепления, а также кронштейны и детали крепежа.
Иногда выделяют и цилиндропоршневую группу, в которую входит поршневая и гильза цилиндра.
Блок цилиндров
Блок цилиндров сейчас неотделим от картера блока. Так, кстати, было не всегда – на старых двигателях (у «Запорожца», например) они могли быть изготовлены раздельно. Именно картер вместе с блоком цилиндров – основной узел конструкции двигателя автомобиля.
Внутри блока и происходит вся полезная работа двигателя. К блоку цилиндров крепятся внизу — нижний картер (поддон), сверху — головка блока, сзади — картер маховика, топливная, выпускная системы и другие детали двигателя. Сам блок прикреплён к шасси автомобиля через специальные «подушки».
Материал, из которого изготовлена эта важная часть двигателя – чаще всего либо алюминий, либо чугун. На спортивных автомобилях могут применяться и композитные материалы. В блок запрессованы съёмные гильзы, которые облегчают ход поршней и ремонтопригодность блока – то есть его расточку под «ремонтные» поршни и кольца. Гильзы делают из чугуна, стали или композитных сплавов. Существует два вида гильз:
«сухие» — когда внешняя поверхность гильз не омывается охлаждающей жидкостью;
«мокрые» — когда гильзу снаружи охлаждает поток жидкости.
Каждый вариант имеет свои достоинства и недостатки.
Поршни
Поршень – это металлическая деталь, которая имеет форму стакана, и в некоторых автопредприятиях водители и автослесари со стажем старые поршни, очищенные от нагара, в качестве стаканов и использовали. Однако основное его предназначение, естественно, не в этом, а для того, чтобы преобразовывать потенциальную энергию давления и термическую энергию температуры газов в кинетическую энергию вращения коленчатого вала в момент рабочего хода.
Во время тактов впуска он служит в качестве насоса, затягивающего воздух или горючую смесь, в ходе такта сжатия сжимает её, а в ходе такта выпуска — помогает удалению отработанных газов. Во время рабочего хода (точнее, чуть раньше) смесь воспламеняется (или форсунка впрыскивает топливо на дизельных двигателях), и горящие газы давят на поршень, заставляя его выполнять работу по преобразованию термической энергии в кинетическую.
Поршень современного автомобильного двигателя выполнен чаще всего из сплавов на основе алюминия. Они обеспечивают хороший отвод лишнего тепла, к тому же довольно лёгкие.
Составные части поршня автомобильного двигателя – это днище, уплотняющяя часть и юбка. Поршень соединяется с шатуном при помощи находящегося в юбке пальца. Для обеспечения плотности соединения поршня со стенкой цилиндра применяются поршневые кольца.
Поршневые кольца
Это плоские незамкнутые (с разъёмом в несколько десятых долей миллиметра) стальные или чугунные кольца, надеваемые в специальные канавки на уплотнительную часть поршня. Они служат для нескольких целей:
Уплотнение. Качественные, неизношенные кольца повышают компрессию (давление в цилиндре).
Не пропускают моторное масло из картера в камеру сгорания, но оставляют на стенках гильзы небольшой слой масла для смазки цилиндра. Самое нижнее кольцо называется маслосъёмным. Его конструкция специально разработана под эту задачу.
Поршневые пальцы
Поршневой палец нужен для того, чтобы связать поршень с шатуном. Он находится во внутренней части юбки поршня и представляет собой металлический цилиндр, отдалённо похожий на палец (отсюда и название). Шатун не крепится жёстко на пальце, ведь надо обеспечивать максимально ровную передачу крутящего момента от поршня к шатуну и далее. Выполнены пальцы обычно из легированной стали.
Пальцы делятся на фиксированные и плавающие. Фиксированный жёстко прикреплён к юбке поршня, и двигается на нём только шатун, а плавающий палец как в поршневой юбке, и на шатуне может крутиться. Сейчас в конструкциях автомоторов преобладают плавающие пальцы, обеспечивающие более полную и плавную передачу крутящего момента и снижающие нагрузку на детали КШМ.
Шатун
Для того, чтоб передать крутящий момент с поршня на коленвал, служит шатун, соединяющий две этих важных детали. Для того, чтобы ремонт шатуна не вызывал особых трудностей, в нём применяются специальные вкладыши, фактически разборный подшипник скольжения, хотя в некоторых двигателях с малой скоростью вращения коленвала по-прежнему применяются баббитовые вкладки, а в быстроходных моторах в обеих головках шатуна (как нижней, так и верхней) установлены подшипники качения. По форме шатун похож на рычаг или гаечный ключ с двутавровым сечением. Его верхняя, обычно неразъёмная головка соединяет его с пальцем поршня, а нижняя, разъёмная соединяет шатун с коленчатым валом. Делают шатуны чаще всего из легированной, иногда из углеродистой стали.
Коленчатый вал
Коленчатый вал, или сокращённо коленвал – одна из важнейших деталей мотора, впрочем, лишних деталей не бывает. Он имеет форму вала с «искривлениями» в сторону, к которой через оси прикреплены шатуны двигателя. Он состоит из следующих деталей:
Шейки. Они нужны для того, чтобы закрепить коленвал на картере и шатуны на нём. Подразделяются на коренные и шатунные. На коренных крепится к картеру сам коленчатый вал, на шатунных шейках к коленвалу крепятся шатуны.
Щёки – они и являются своего рода «коленями» коленчатого вала, именно они крутятся вокруг оси коленчатого вала. Щёки коленвала соединяют коренные и шатунные шейки.
Передняя выходная часть вала. К ней присоединены шкивы отбора мощности для привода через ремень, цепь или шестерни распредвала, системы охлаждения генератора и других агрегатов.
Задняя выходная часть вала. Она соединена с маховиком и служит для отбора мощности для «основного предназначения» автомобиля – для движения.
В конструкции коленчатого вала также предусмотрены дополнительные детали, например, противовесы, предназначенные для компенсации вибраций вала, возникающих при ударных нагрузках.
Коленчатые валы чаще всего изготавливаются либо из стали, либо из высококачественного лёгкого чугуна. Чугунные коленвалы изготавливаются при помощи литья, стальные – при помощи штамповки.
Картер двигателя
Картер, отливаемый вместе с блоком цилиндров – основная деталь двигателя автомобиля, можно сказать, что рама двигателя. Именно на картере закреплены основные части двигателя, в нём крутится коленчатый вал, в цилиндрах двигаются поршни и происходит непосредственный процесс превращения энергии сгорания топлива в энергию вращения колёс вашего автомобиля.
Ещё картер является основным местом для размещения моторного масла, которое смазывает двигатель. Для хранения масла также предназначен поддон – нижняя часть картера.
Принцип работы кривошипно-шатунного механизма
Во время основного такта работы автомобильного двигателя – рабочего хода (расширения), горящие газы давят на поршень, а тот двигается вниз — от верхней мёртвой точки к нижней, тем самым передавая энергию посредством пальца и шатуна на коленчатый вал. Шатун может ограниченно поворачиваться и вокруг оси пальца поршня, и вокруг шатунной шейки коленвала, и таким образом поступательное движение поршня превращается во вращательное.
Стоит заметить, что при остальных тактах коленчатый вал через шатун, наоборот, сообщает возвратно-поступательное движение поршню. Где он его берёт? Из «рабочих» цилиндров, энергии коленвала и маховика, а при запуске – стартера.
Неисправности, возникающие при работе КШМ и их причины
Неполадки и поломки в кривошипно-шатунном механизме могут произойти в самых разных его узлах. Чтобы свести риск возникновения этих неприятностей до минимума, необходимо знать, отчего они происходят. Чаще всего это нагар на деталях и их износ. Наиболее часто происходят поломки КШМ от использования некачественного автомобильного топлива и масла. Особенно это чревато для дизелей, которые требовательны к качеству горюче-смазочных материалов, что может вывести из строя не только КШМ. Редкая смена масла, несвоевременная замена топливных, воздушных и масляных фильтров – всё это также несёт потенциальную угрозу поломок. Может послужить причиной неисправности перегрев двигателя, а также утечка и снижение уровня моторного масла в двигателе.
Перегрев двигателя может привести даже к заклиниванию. Чтобы этого не случилось, заливайте качественную охлаждающую жидкость и следите за состоянием системы охлаждения.
Бывает, что проблема в системе питания или в зажигании. Тогда смесь сгорает не полностью или неравномерно.
Ещё одна распространённая причина поломок – это использование некачественных запчастей. Не покупайте фейк и пользуйтесь услугами проверенных автосервисов.
Перечень неисправностей КШМ
Главные неприятности, которые могут случится с кривошипно-шатунным механизмом:
Как шатунные, так и коренные шейки коленчатого вала подвержены износу и механическим повреждениям.
Износ, механические повреждения и даже расплавление могут угрожать и вкладышам (подшипникам) шеек коленвала.
«Болезни» поршневых колец – это закоксовывание не до конца сгоревшими продуктами горения (углеводороды окисляются только до углерода), их залегание и даже поломки, что может привести к фатальным последствиям.
Цилиндропоршневая группа также подвержена износу. В современных «движках» это не так заметно, всё-таки они созданы по последнему слову техники, но у каждой детали имеется конечный ресурс.
На днище поршня может отложиться нагар.
В деталях могут появиться трещины, они могут прогореть, обломиться и даже расплавиться.
Двигатель может даже заклинить.
Признаки наличия неисправностей в работе КШМ
Могут насторожить посторонние стуки в двигателе. Возможно, это связано с детонацией или вам попалось не слишком качественное топливо. Последствия как детонации, так и некачественного топлива могут быть печальными. Звук при детонации более звонкий, а вот глухой звук может свидетельствовать о том, что износились шейки коленвала. Если же он совсем звонкий и происходит не только при резком увеличении оборотов (например, если вы быстро тронулись с места), то вполне возможно, что вкладыши шейки коленвала начинают плавиться. Возможно, причиной масляное голодание, но так или иначе – в сервис.
Также многое может сказать дым из двигателя. Если он сизый, то значит, что в камеру сгорания попадает масло. Возможно, виной тому маслосъёмные колпачки ГРМ, а возможно, проблема в поршневых кольцах. Накопление нагара на поршнях и цилиндрах приводит к увеличению трения и повышенному износу деталей. Если проблема в кольцах, то будет снижена компрессия, хотя понижение компрессии может быть связано и с другими причинами.
Обслуживание КШМ
Прежде всего, общие советы: «машина любит ласку, чистоту и смазку». Следует вовремя проверять уровень масла, не допускать перегрева двигателя и заправляться только качественным горючим. Серьёзные проблемы с КШМ решаются только в автосервисе. Разумеется, есть автолюбители, которые самостоятельно могут расточить цилиндр до ремонтного размера, но это всё же характерно для не самых новых автомобилей.
В «закоксованных» двигателях можно провести раскоксовку, которая делается как с разбором двигателя, так и при помощи специальных средств – без такового. Однако, подобные манипуляции лучше доверить профессионалам. Соблюдайте сроки ТО.
Заключение
Кривошипно-шатунный механизм – это важнейший агрегат в автомобиле. От его функционирования зависит состояние всего автомобиля и настроение его владельца. Следите за его технической исправностью, и двигатель будет работать долго, радуя вас мощностью и экономичностью.
Материалы для коленчатого вала
Для изготовления коленчатых валов применяются стали 45, 45А, 40Х, 20Г2 и 50Г. В дизелях, работающих с давлением наддува рк ^ 0,15 Мн/м2 (1,5 кГ/см2), для коленчатых валов используют высоколегированные стали 18ХНМА, 18ХНВА и 40ХНМА с повышенными пределами текучести и прочности.
Обычно коленчатые валы изготовляют ковкой. В последнее время стали применять литые коленчатые валы из высокопрочного чугуна, модифицированного магнием, перлитного ковкого чугуна, легированного никельмолибдено-вого чугуна.
Наибольшее применение для литых коленчатых валов получил высокопрочный ВЧ 50-1,5 (НВ 187—255) и перлитовый чугун.
Литые коленчатые валы имеют следующие преимущества по сравнению с коваными: меньший расходметалла,сокращениечисла операцийпримеханическойобработке,возможность придания оптимальных форм в отношении распределения металла и повышения усталостной прочности.
Литые коленчатые валы из чугуна обладают лучшей способностью гашения крутильных колебаний.
Литые чугунные валы обладают меньшей прочностью (особенно на изгиб), чем штампованные стальные валы. Поэтому у чугунных валов увеличивают диаметры шатунных и коренных шеек, толщину щек и радиусы галтелей. Чугунные коленчатые валы изготовляют полноопорными. Шейки чугунных валов имеют высокую износостойкость, что позволяет применять подшипники из свинцовистой бронзы.
Масса обработанного литого коленчатого вала на 10—15% меньше массы кованого.
После ковки коленчатые валы отжигают или нормализуют для снятия внутренних напряжений и понижения твердости до НВ 163—269,чтобы облегчитьмеханическую обработку.После механической обработки коленчатые валы перед шлифованием подвергают вторичной термической обработке (закалка и отпуск), что значительно улучшает их механические свойства и повышает поверхностную твердость шеек. Обычно вторичная термическая обработка производится с нагревом т. в. ч. (токами высокой частоты).
Глубина закаленного слоя должна быть не менее 3—4 м.и, чтобы после перешлифования шеек коленчатого вала под ремонтные размеры толщина закаленного слоя была не менее 1 мм. Твердость шеек коленчатого вала из стали 50Г HRC52—62, а из стали 45Г2 — HRC48—50.
Что такое коленчатый вал двигателя в автомобиле
Коленчатый вал или, как его называют опытные водители и автослесари, коленвал – важная функциональная деталь автомобильного двигателя, которая имеет строгую индивидуальную форму в зависимости от модели. В данной статье мы рассмотрим, что такое коленчатый вал двигателя, какие функции он выполняет и к чему приводит эксплуатация машины с неисправным валом.
Что такое коленвал
Коленчатый вал – это механическая деталь автомобильного двигателя, которая является промежуточным звеном-преобразователем тепловой энергии сгораемого топлива в механическую энергию вращения колёс. По внешнему виду он представляет собой вал из стального сплава со множеством шатунных шеек, которые между собой соединены коленной шейкой. Число шеек-колен соответствует числу цилиндров в двигателе, их расположению, форме. Шейки соединены с поршнями через шатуны, которые, двигаясь возвратно-поступательно, приводят вал в движение.
Если в коленчатом вале шатунные шейки находятся с двух сторон от коленной шейки, он называется полноопорным. Если же они расположены только с одной стороны – неполноопорным.
Коленвал производится из углеродистой или легированной стали с повышенной износостойкостью (для спорткаров, люкс-моделей и автомобилей с повышенной мощностью) или модифицированного чугуна (для стандартных серийных моделей) с помощью литья или прессования. Для легирования стали применяются молибден, хром и иные металлы, существенное увеличивающие прочность сплава.
В большинстве двигателей коленчатый вал располагается в нижней части, над картером, в оппозитных – выше, по центру мотора.
Для чего нужен коленчатый вал
Двигатели внутреннего сгорания работают за счёт функционирования поршневого блока. Его принцип действия заключается в следующем:
во время сгорания топливной смеси в цилиндре воздух расширяется с создаёт давление;
под действие давления поршень выталкивается, совершая поступательное движение;
благодаря соединению с шатунными шейками поступательное движение превращается во вращательное;
энергия вращения, переданная на коленчатый вал, передаётся колёсам автомобиля, и он приводится в движение.
Таким образом, коленвал – это преобразователь одного вида механического движения в другой. Как известно, поршни в ДВС двигаются несимметрично. В то время, как одни из них совершают поступательные движения (выталкиваются из цилиндра), другие – возвратное (затягиваются обратно). Конструкция коленчатых валов разрабатывается с предельной точностью, поэтому во время работы все цилиндры сохраняют общее вращение вала. Поэтому коленца имеют разные оси вращения.
Коренная шейка – валовая опора, которая служит осью вращения самого вала. Она лежит в подшипнике, который встроен в картер.
Шатунные шейки – опоры, связанные с поршневыми шатунами. Во время работы они смещаются относительно оси вала по круговой траектории.
Щёки – вспомогательные детали, связывающие шатунные и коренные шейки. Они также предотвращают разрушение вала из-за резонансной нагрузки.
Хвостовик – задняя часть, соединённая с шестерной отбора или маховиком для передачи мощности на движение.
Носок – передняя часть вала, которая посредством шкива или зубчатого колеса передаёт мощность приводу газораспределительного блока и других вспомогательных механизмов.
Противовесы – детали, необходимые для распределения нагрузки и уравновешивания массы шатунов и поршней.
Для уплотнения носка и хвостовика используются защитные сальники. Это предотвращает просачивание масла в местах выхода частей маховика за границы блока цилиндров. Вращательное движение обеспечивается тонкими стальными подшипниками скольжения. Чтобы ось вращения вала не смещалась, на одну из коренных шеек ставится упорный подшипник.
Во время работы самые большие напряжения концентрируются в месте соединения шеек и щёк. Для разгрузки его делают с галтелью – полукруглым переходом с промежуточным технологическим поясом. По причине экстремальных нагрузок в месте перехода щёк в шейки в своё время производители отказались от составных коленвалов, детали которых соединялись крепежом.
Для чего нужен датчик коленвала
Датчик положения коленчатого вала (ДПКВ) используется в автомобилях, которые оборудованы системами электронного управления мотором. Поскольку вращение вала сказывается на работе многих функциональных блоков и систем, своевременная подача топлива в цилиндры ДВС может улучшить ездовые характеристики. Датчик коленвала как раз отвечает за синхронизацию рабочих процессов. В различных моделях автомобилей его использование улучшает синхронизацию зажигания или топливных форсунок. Прибор передаёт на электронный блок управления данные о положении коленвала, направлении и частоте вращения.
Встречаются датчики следующих видов:
Магнитные (индуктивного типа). Сигнал на ЭБУ формируется в момент прохождения синхронизационной метки через магнитное поле, которое формируется вокруг датчика. Система не требует отдельного питания, и может параллельно работать как датчик скорости.
Датчики Холла (работают на эффекте Холла). Ток в приборе начинает движение при приближении изменяющегося магнитного поля. Перекрытие магнитного поля реализуется специальным синхронизирующим диском, зубья которого взаимодействуют с магнитным полем ДПКВ. Дополнительная функция – датчик распределения зажигания.
Оптические. В данном случае для синхронизации также используется зубчатый диск. Он перекрывает оптический поток, проходящий между приёмником и светодиодом. Приёмник фиксирует прерывания светового потока и передаёт в электронный блок управления импульс напряжения, соответствующий параметрам вращения вала.
Датчик коленвала устанавливается внутри корпуса двигателя, как и прочие датчики управления. Для его встраивания используется специальный кронштейн, расположенный возле приводного шкива генератора. Внешне он отличается от датчиков другого назначения наличием проводка длиной 55-70 см с особым разъёмом, который соединяет устройство с системой электронного управления.
Видео на тему
Похожие публикации
Назначение и устройство коленчатого вала – понятными словами о детали
Даже непрофессиональный механик в двух словах знает назначение и устройство коленчатого вала, так как он является очень важным конструктивным элементом двигателя внутреннего сгорания. Именно в его функции входит воспринимать возвратно-поступательные движения поршней и передавать их в виде крутящего момента вспомогательным агрегатам, а также ротору тягового генератора.
Назначение и устройство коленчатого вала – основные узлы
Зная, для чего нужен коленвал, можно утверждать, что на него в процессе работы воздействуют и крутящие, и изгибающие силы, поэтому для того чтобы он не вышел из строя раньше заданного времени, его износостойкость должна быть высокой. Именно с этой целью такие детали чаще всего изготавливают из высокопрочных легированных сталей, еще встречаются и литые коленчатые валы, изготовленные из высокопрочного чугуна и закаленные токами высокой частоты. Коленвалы бывают без противовесов и с двойным противовесом.
Расположена эта деталь непосредственно в двигателе автомобиля, и его конструкция напрямую зависит от движка. Однако, несмотря на это, в конструкциях абсолютно всех коленчатых валов наблюдается много общего. Так из чего состоит коленвал? В качестве опоры выступают коренные шейки, в основном, применяется конструкция с четырьмя опорами, но встречаются и трехопорные. В шестицилиндровых двигателях расположены валы, у которых семь опор. Для того чтобы деталь была уравновешена, необходим противовес, а если диаметры цилиндров небольшие, тогда применяется одинарный противовес. Благодаря им обеспечивается плавная работа всего двигателя.
Из чего состоит коленвал – вспомогательные механизмы
Выяснив, для чего служит коленчатый вал и какие силы на него действуют, становится понятным, почему сопряжения между щеками и шатунными шейками делаются немного закругленными, это предотвращает преждевременное разрушение. Между двумя щеками располагается шатунная шейка, которая называется коленом, ее предназначение – обеспечивать равномерность воспламенения, уравновешенность движка, минимальные изгибающие моменты и крутильные колебания.
Подшипники скольжения обеспечивают вращение шатунов и коленвала в опорах. На крайней или же средней коренной шейке устанавливается упорный подшипник скольжения, в его задачи входит предотвращение осевых перемещений детали. Учитывая количество деталей, которые должны четко работать все вместе, нетрудно догадаться, как тщательно балансируется эта деталь в процессе изготовления, но все равно иногда обнаруживается дисбаланс, правда, происходит это еще на этапе испытаний, и в продажу такой агрегат не попадет.
Как работает коленвал – взгляд изнутри
Принцип работы коленчатого вала заключается в следующем. В момент максимального удаления поршня щеки и шатун коленвала вытягиваются в одну линию. В это время в цилиндрах начинает гореть топливо, и, соответственно, выделяются горючие газы, которые перемещают поршень по направлению к коленвалу. Вместе с ним также перемещается и шатун, нижняя головка которого поворачивает относительно своей оси коленчатый вал. Как только он развернется на 180°, шатунная шейка начинает движение в обратном направлении, таким образом, перемещается и поршень.
Получается следующая картина: поршень равномерно то удаляется, то приближается к детали, крайние точки поршня называются «мертвыми», так как в этих положениях его скорость равна нулю. Таким образом, мы разобрались, как работает коленчатый вал.
Немаловажную роль играет и система смазки в детали. От общей магистрали к опорам коренных шеек обеспечивается подвод масла, которое подается под давлением. Далее по специальным каналам, расположенным в щеках, это масло подается к шатунным шейкам. Благодаря масляной пленке, повышается износостойкость данных элементов. Кроме того, благодаря давлению масла можно проверить, нуждаются ли шейки коленчатого вала в замене. Определившись, для чего нужен коленчатый вал, можно смело утверждать, что он занимает одну из ведущих позиций среди деталей двигателя.
Оцените статью:
Поделитесь с друзьями!
Программное обеспечение Проектирование коленчатого вала — Анализ баланса и инерции, а также проектирование двух / четырехтактного двигателя Коленчатый вал
щелкните изображение для презентации
Конструкция коленчатого вала это программное обеспечение, разработанное для удовлетворения потребностей многих производителей и тюнеров в разработке и оптимизации
коленчатый вал.Это программное обеспечение имеет важное значение для определения лучших решений баланса и инерции для
каждый конкретный двигатель и каждая конкретная потребность, чтобы
оптимизировать производительность, управляемость и надежность.
Характеристики
Коленчатый вал, а также конструктивная точка зрения должны быть также изучены по двум фундаментальным аспектам: уравновешивание сил, создаваемых движением возвратно-поступательных масс (поршень, поршневые кольца, поршневой палец и
малый конец шатуна) и вращающиеся (большие
конец шатуна, шатун), а также по инерции, которую способен предложить коленчатый вал.
В одноцилиндровом двигателе, если вы не используете валы, вращающиеся в противоположных направлениях, балансировка может быть только частичной, и вопрос о том, как выбрать эту частичную балансировку, всегда был предметом обсуждения, что может быть лучшим, на самом деле нет Лучшее решение в абсолютном выражении, но оптимальное следует выбирать в соответствии с характеристиками двигателя и транспортного средства, на котором он используется.
То же самое и с инерцией коленчатого вала, легче, тяжелее, дырочки нет, это вопросы, которые со временем возникают,
на который невозможно дать ответ, потому что и для этого аспекта лучшее решение зависит от характеристик двигателя и его использования.
Ввиду этого на практике он делает первоначальный выбор, а затем на основе тестов и повторных попыток вносит какие-либо изменения, этот процесс долгий и трудоемкий и часто не известно, действительно ли найденное решение является лучшим.
Программное обеспечение Crankshaft Balance Design может заранее оценить технические эффекты, которые
баланса и инерции дают с точки зрения производительности и надежности по отношению к характеристикам двигателя и
транспортного средства, на котором он применяется, что позволяет быстро найти оптимальное решение.
Программное обеспечение состоит из четырех разделов, которые позволяют анализировать,
рассчитать и разработать коленчатый вал наилучшим образом.
АНАЛИЗ КОЛЕНВАЛА
В этом разделе ПО
рассчитывает основные характеристики коленчатого вала, которые
вы или что хотите развить, на самом деле быстро вычисляет ВЕС —
БАЛАНС — ИНЕРЦИЯ коленчатого вала.
КОНСТРУКЦИЯ КОЛЕНВАЛА
В этом разделе программа вычисляет РАЗМЕР и
ПОЛОЖЕНИЕ ПРОТИВОВЕС , или возможных ОТВЕРСТИЙ ,
иметь определенную балансировку коленчатого вала, отображаемую в
А пока как доработаны инерция и вес.
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ
В этом разделе программное обеспечение вычисляет, как изменяется КРИВАЯ МОЩНОСТИ двигателя в зависимости от
выбор
БАЛАНС и ИНЕРЦИЯ , которые вы сделали на
коленчатый вал.
РАСЧЕТ ХАРАКТЕРИСТИК АВТОМОБИЛЯ
Этот раздел доступен в версии PRO
ПО позволяет рассчитать ПРОИЗВОДИТЕЛЬНОСТЬ АВТОМОБИЛЯ учитывая особенности коленчатого вала
влияют на мощность двигателя и поведение в фазе переключения передач.
Ниже мы подробно покажем, как работает программа в разных
области.
АНАЛИЗ КОЛЕНВАЛА
Программа позволяет рассчитать основные
особенности коленчатого вала в простой форме.
Фактически достаточно для ввода информации кривошипа ползунка (ход,
и веса деталей), а также некоторые данные, позволяющие
определяем коленчатый вал. В связи с этим программное обеспечение предлагает различные возможности ввода данных для
удовлетворить все потребности.
Если вы сделали классический экспериментальный
тест для расчета баланса, вы можете ввести в программе
значение найденных весов и программное обеспечение в
функция веса кривошипа ползунка рассчитает быстро BALANCE вашего коленчатого вала. Более того, если
вы измеряете ВЕС и максимальный диаметр
коленчатого вала
программное обеспечение рассчитает оценку ИНЕРЦИЯ самого коленчатого вала.
Если у вас есть трехмерный чертеж коленчатого вала, от
Ваш CAD 3D вы можете легко принять положение гравитации, а ВЕС коленчатого вала, благодаря этим данным программное обеспечение
быстро рассчитайте БАЛАНС вашего
коленчатый вал в зависимости от грузов кривошипа ползуна.
Если вместо этого ваш коленчатый вал имеет классическую форму полного круга, или
вы хотите разработать коленчатый вал такого типа, программное обеспечение спасибо
основные размеры рассчитываются автоматически ВЕС,
БАЛАНС И ИНЕРЦИЯ вашего коленчатого вала.
Если в коленчатом валу уже есть противовесы или отверстия,
в программе можно легко ввести свои
характеристики, чтобы учесть в
расчеты и посмотреть, как они влияют на ВЕС , БАЛАНС
ИНЕРЦИЯ .
После ввода данных коленчатого вала в модальность
что вы предпочитаете, и особенности кривошипа слайдера,
Программное обеспечение Crankshaft Design вычисляет ВЕС , БАЛАНС и ИНЕРЦИЮ коленчатого вала, как с учетом
противовесов и отверстий, исключая их, в
так это тоже будет легко понять
характеристики исходной геометрии коленчатого вала, а также оценить возможность доработок.
Помимо расчетов, программа рисует
геометрия коленвала, которую вы ввели,
позволяя оценить, верны ли данные и где
есть место для любых доработок и улучшений.
КОНСТРУКЦИЯ КОЛЕНВАЛА
Если вы хотите модифицировать существующий коленчатый вал или хотите изучить
новый коленчатый вал, после этапа анализа, который позволяет
иметь полное представление о ситуации,
программное обеспечение Crankshaft Design позволяет легко изучить
вмешательства на коленчатом валу для получения BALANCE и INERTIA , которые вам нужны.
Программа позволяет фактически автоматически рассчитывать
положение и характеристики противовесов, которые
необходимо для достижения определенного баланса.
Для начала необходимо
выберите желаемый процент баланса
получить.
Дополнительно вы можете
укажите количество противовесов, которое вы хотите
использование, толщина противовеса и
материал (плотность)
Наконец-то вы можете
выберите, должно ли положение противовесов
генерировать минимальную или максимальную инерцию.
В конце
расчет программа предоставляет вам всю информацию о противовесах, которые
вам следует использовать:
Это также показывает вам, как изменить характеристики
коленчатый вал для применения
противовесы, и относительный чертеж в масштабе:
Этот раздел программного обеспечения Crankshaft Design
может использоваться как для расчета противовесов
коленчатого вала, который никогда не балансировался.
Оба, чтобы изменить балансировку коленчатого вала, у которого балансировка отличается от
что мы хотим.
Если, например, у вас
уже коленвал с балансом 50% и вы
хотите получить баланс 40%, программа рассчитает
размеры и положение отверстия на коленчатом валу, если вместо этого вы хотите увеличить
процент от баланса, программа укажет вам, позиция
и характеристики используемого дополнительного противовеса.
Программа позволяет также видеть баланс и
инерция, которую вы получаете при использовании определенных противовесов, или
проделывая дырки от специфики
Показывает чертеж в масштабе и как изменить ВЕС ,
BALANCE и INERTIA с новыми противовесами и
нанесены отверстия.
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ
Выбор BALANCE и INERTIA в
дополнение, чтобы повлиять
силы и вибрации шасси,
влияют на работу двигателя. Фактически в действии
выбранного вами балансира BALANCE , измените силы
действуя между поршнем и цилиндром, а также на коренные подшипники и шатунные подшипники, и, следовательно, на механические потери на трение, в то время как INERTIA влияет на
частота вращения коленчатого вала во время цикла двигателя, и, следовательно,
изменяет гидродинамическое поведение двигателя и относительную эффективность.
Программное обеспечение Crankshaft Design может рассчитать МЕХАНИЧЕСКИЕ ПОТЕРИ в зависимости от выбора БАЛАНС что вы делаете, и посмотреть, как ENGINE POWER CURVE изменяется в зависимости от коленчатого вала INERTIA .
В программном обеспечении необходимо ввести основные технические
данные двигателя и кривую мощности, обнаруженную на
динотест.
На данный момент
ввод балансового процента, а коленвал
инерция (можно также использовать значения, рассчитанные в
фазы АНАЛИЗА или ПРОЕКТИРОВАНИЯ),
программа рассчитает, как изменить мощность
кривая, мощность, потерянная на механическое трение, и
силы, действующие на шасси.
В дополнение к глобальным данным он также показывает
графики всех величин, рассчитанных как
функция скорости двигателя.
МОЩНОСТЬ
ПОТЕРЯННАЯ МОЩНОСТЬ
СРЕДНЯЯ ВЕРТИКАЛЬНАЯ СИЛА
МАКСИМАЛЬНАЯ ВЕРТИКАЛЬНАЯ СИЛА
СРЕДНЯЯ ГОРИЗОНТАЛЬНАЯ СИЛА
МАКСИМАЛЬНАЯ ГОРИЗОНТАЛЬНАЯ СИЛА
Этот раздел программного обеспечения Crankshaft Design является фундаментальным.
для улучшения характеристик двигателя в том направлении, в котором вы хотите воздействовать на коленчатый вал.Фактически
ПО позволяет сравнивать разные решения и, следовательно, сразу находить, что
оптимально для ваших нужд.
Благодаря ПО
Конструкция коленчатого вала поэтому вы можете изучить
вмешательство в коленчатый вал в качестве противовеса,
и в качестве инерции для моделирования кривой мощности для ваших нужд.
Затем вы можете работать над изменением максимальной пиковой мощности,
или чтобы иметь больше протяженности, или играть с инерцией
для смягчения кривой крутящего момента и т. д., определяя
оптимальные решения быстро и точно. более того
вы всегда можете оценить, как меняются силы на шасси в зависимости от сделанного вами выбора,
управление поэтому также возможные проблемы, связанные
к вибрациям.
Как вы видели,
благодаря программному обеспечению Crankshaft Design за разработку и
улучшить, ваш коленчатый вал, становится действительно легко, и вы можете
действительно увеличить производительность вашего двигателя, и вашего
автомобиль, воздействуя также на коленчатый вал в направлении
твои нужды! Кроме того, кратко описаны функциональные возможности
две версии программного обеспечения.
ОСНОВНОЙ
PRO
Анализ коленвала
Х
Х
конструкция коленчатого вала
Х
Х
производительность двигателя
расчет
Х
Х
характеристики автомобиля
расчет
Х
Покупка
NT-PROJECT — Феррара (Италия)
— info @ ntproject.ком
все
Материальное содержание без присутствия мест коперто далле легги суль диритто д’авторе
2005/19
ᐈ Стоковые изображения чертежи коленчатого вала, Роялти-Фри Изображения векторов коленчатого вала
ᐈ Стоковые фотографии чертежи коленчатого вала, Роялти-Фри Изображения вектор коленчатого вала | скачать на Depositphotos®Автомобильные поршниПоршни с коленчатым валомДвигатель внутреннего сгоранияЛоготип ремонта автомобилей.Коленчатый вал в сбореЧасть двигателяАвтозапчастиЗапасный двигатель, коленчатый вал, вектор. Значок коленчатого вала. Запасные машины.Поршни двигателяКоленчатый валЧасть двигателяАвтомобильные детали в стиле рисования от рукиПоршни двигателя на коленчатом валу — эмблема автосервисаЧасть двигателяАвтомобильные запчасти вектор бесшовные моделиПоршни автомобильного автосервиса ретро логотипВекторный логотип гаражаЭмблема автосервиса — символический двигательАвтомобильные запчастиРисование бензинового двигателя с элементами двигателя внутреннего сгорания со стороны ходовой части.Промышленный. Мультяшный стиль. Иллюстрация и элемент дизайна. Монохромный. Автосервис. Изометрические значки автомобильных запчастейПоршеньЧасть двигателяАвтозапчастиДвигательАвтомобильные запчастиВекторный монохромный логотип коленчатого валаВектор внутреннего сгорания двигателя Значок поршня двигателяСервисная станция старинная этикетка, графика дизайна тройника, печать типографики автосервиса. Печать на футболке, рисунок футболки. Использовать как принт футболки, эмблему, логотип в сети. Татуировка в виде сердца. Набор значков схемы транспортировки двигателя взрыва сердца100, таких как демпфер, выхлопная труба, выравнивание колес, автомобильный ускоритель, автомобильная подушка безопасности, автомобильный генератор переменного тока, амперметр, стабилизатор поперечной устойчивости, набор значков запасных частей, значки автомобильных запчастей и услуг 1Векторное искусство, Дизайн иллюстрации. Поршень и шатун в сборе. Множество изображений запасных частей. Логотип ремонта автомобилей. Набор автозапчастей Значок ГРМ. Серые автомобильные поршни на белом фоне. Системы впрыска бензина. Схема четырехтактного двигателя. Поршни4-цилиндровый двигатель вектор. Значок автомобиля. Значок дорожного тандемного ролика. с механическими деталямиДвигательПростой линейный поршневой вектор значокАвтозапчастиАвтомобильные части линии иконки наборИконы автомобильных запчастей изометрическиеВилочный погрузчик силуэт, состоящий из деталейМногие изображения запасных частейКонцепция сервисных элементов автомобильного привода с плоскими значками и вектором механического оборудования.Многие изображения запасных частейСекция опоры подшипника простая линия вектор значокИконы автозапчастей изометрическиеПоршниМеханик и детали автомобиляИконы автозапчастей изометрическиеКомплект автозапчастейИкона автозапчастейЛоготип для ремонта автомобилей.Исправление двигателяИконы автозапчастей изометрические
Дизайн коленвала | анализ коленчатого вала | усталость коленчатого вала
Программное обеспечение для проектирования коленчатого вала
DNV GL одобряет конструкцию коленчатого вала на протяжении десятилетий. У нас есть знания в предметной области и практический опыт, которые были вложены в разработку программного обеспечения Nauticus Machinery Crankshaft Fatigue.Этот программный модуль для проектирования и анализа коленчатого вала рассчитывает защиту от усталости на основе Руководства по классу DNV GL 0037. Он также охватывает соответствующий метод расчета в соответствии с унифицированными требованиями IACS M53.
Анализ коленчатого вала
Анализ коленчатого вала на прочность первоначально состоит в определении номинального переменного изгиба и номинального переменного напряжения скручивания, которые умножаются на соответствующие коэффициенты концентрации напряжений с использованием теории постоянной энергии деформации (v.Критерий Мизеса), приводят к эквивалентному знакопеременному напряжению (одноосное напряжение). Затем это эквивалентное переменное напряжение сравнивается с усталостной прочностью коленчатого вала выбранного материала. Это сравнение затем покажет, имеет ли соответствующий коленчатый вал соответствующие размеры согласно анализу коленчатого вала.
Конструкция коленчатого вала основана на оценке защиты от усталости коленчатого вала в зонах высоких нагрузок. Анализ коленчатого вала также основан на предположении, что области, подверженные наибольшим напряжениям, следующие:
угловых переходов между шатунной шейкой и перемычкой, а также между шейкой и перемычкой
выходов отверстий шатунной шейки
выходов масляных отверстий шейки
Эти методы проектирования и анализа коленчатого вала применимы к двигателям как для главных силовых установок, так и для вспомогательных целей, поскольку они предназначены для непрерывной работы с указанными (номинальными) характеристиками.Если предполагается частое использование перегрузки (сверх номинальной), т.е. накопление нескольких миллионов циклов нагрузки, эта перегрузка должна лечь в основу расчета. Кроме того, эти методы применимы к цельнокованым или полуфабрикатным коленчатым валам из кованой и литой стали и с одним ходом кривошипа между коренными подшипниками. Конструкция с более чем одним ходом кривошипа между коренным подшипником, канавками между кривошипами со смещением, полностью собранными коленчатыми валами или сварными коленчатыми валами будет специально рассматриваться на основе эквивалентности «нормальным» требованиям.
Программа определения усталости коленчатого вала от DNV GL
Расчетный дизайн и анализ безопасности против усталостных отказов коленчатого вала в дизельных двигателях и безопасности против проскальзывания для полувстроенных коленчатых валов
Проверка на усталость на основе руководящих принципов DNV GL Class 0037
метод расчета в соответствии с методом IACS для проектирования и анализа коленчатого вала
Применяется к дизельным двигателям как главной силовой установки, так и вспомогательного назначения
Применяется к цельнокованым или полуготовым коленчатым валам из кованой и литой стали с одним ходом коленвала между коренными подшипниками
Ключевые преимущества модуля программного обеспечения для проектирования и анализа коленчатого вала
Программа определения усталости коленчатого вала рассчитывает в соответствии с правилами DNV GL и требованиями IACS в том же инструменте проектирования коленчатого вала
Функции импорта для давления в цилиндрах или теоретический метод расчета
Гибкий ввод опции (используйте предопределенный ввод для e.г. коэффициенты концентрации напряжений или позвольте программе рассчитать их)
Расширенный генератор отчетов
Коленчатые валы
Коленчатый вал установлен в положении, параллельном продольной оси картера, и обычно поддерживается коренным подшипником между каждым ходом. Коренные подшипники коленчатого вала должны жестко поддерживаться в картере. Обычно это достигается с помощью поперечных перемычек в картере, по одной на каждый коренной подшипник. Перемычки составляют неотъемлемую часть конструкции и, помимо поддержки основных подшипников, повышают прочность всего корпуса.Картер разделен на две части в продольной плоскости. Это разделение может быть в плоскости коленчатого вала, так что половина главного подшипника (а иногда и подшипники распределительного вала) находится в одной секции корпуса, а другая половина — в противоположной секции. [Рис. 1-6] Другой метод состоит в том, чтобы разделить корпус таким образом, чтобы основные подшипники были прикреплены только к одной секции корпуса, к которой прикреплены цилиндры, тем самым обеспечивая средства снятия части картера для проверки без нарушение регулировки подшипника.
Рисунок 1-6. Типичный оппозитный двигатель разобран на узлы.
Коленчатый вал — это основа поршневого двигателя. На него действует большинство сил, создаваемых двигателем. Его основное назначение — преобразовать возвратно-поступательное движение поршня и шатуна во вращательное движение для вращения винта. Коленчатый вал, как следует из названия, представляет собой вал, состоящий из одного или нескольких кривошипов, расположенных в определенных точках по его длине. Шатуны, или ходы, формируются путем штамповки смещений в вал перед его обработкой.Поскольку коленчатые валы должны быть очень прочными, их обычно выковывают из очень прочного сплава, такого как хромоникель-молибденовая сталь.
Коленчатый вал может быть цельным или составным. На рис. 1-7 показаны два типичных типа цельных коленчатых валов, используемых в авиационных двигателях. Четырехходовая конструкция может использоваться как на четырехцилиндровых горизонтальных оппозитных двигателях, так и на четырехцилиндровых рядных двигателях. Шестиходовой вал используется в шестицилиндровых рядных двигателях, 12-цилиндровых двигателях V-типа и шестицилиндровых оппозитных двигателях.Коленчатые валы радиальных двигателей могут быть одноходовыми, двухходовыми или четырехходовыми, в зависимости от того, является ли двигатель однорядным, двухрядным или четырехрядным. Однонаправленный радиальный коленчатый вал двигателя показан на Рисунке 1-8. Независимо от того, сколько ходов он может иметь, каждый коленчатый вал состоит из трех основных частей: шейки, шатунной шейки и щеки кривошипа. Противовесы и демпферы, хотя и не являются настоящей частью коленчатого вала, обычно прикрепляются к нему для уменьшения вибрации двигателя.
Журнал поддерживается коренным подшипником и вращается в нем. Он служит центром вращения коленчатого вала. Поверхность закалена для уменьшения износа. Шатунная шейка — это участок, к которому прикреплен шатун. Это не по центру от основных журналов, и его часто называют броском. Две кривошипные щеки и шатунная шейка совершают бросок. Когда к шатунной шейке прикладывается сила в любом направлении, кроме параллельного или перпендикулярного к центральной линии коленчатого вала и через нее, это вызывает вращение коленчатого вала.Внешняя поверхность закаленные азотирования, чтобы увеличить его устойчивость к износу и обеспечить требуемую несущую поверхность. Шатунная шейка обычно полая. Это уменьшает общий вес коленчатого вала и обеспечивает канал для передачи смазочного масла. На ранних двигателях полая шейка кривошипа также служила камерой для сбора шлама, нагара и других посторонних материалов. Центробежная сила бросала эти вещества к наружной стороне камеры и держала их от достижения шатуна опорной поверхности.Из-за использования беззольных диспергирующих масел в новых двигателях больше не используются шламовые камеры. На некоторых двигателях в щеке коленчатого вала просверливается канал, позволяющий распылять масло из полого коленчатого вала на стенки цилиндра. Щека кривошипа соединяет шатунную шейку с главной шейкой. В некоторых конструкциях щека выходит за пределы шейки и несет противовес для уравновешивания коленчатого вала. Щека кривошипа должна иметь прочную конструкцию, чтобы обеспечить необходимую жесткость между шатунной шейкой и шейкой.
Во всех случаях тип коленчатого вала и количество шатунов должны соответствовать расположению цилиндров двигателя. Положение кривошипов коленчатого вала относительно других кривошипов того же вала выражается в градусах.
Самый простой коленчатый вал — одноходовой или 360 °. Этот тип используется в однорядном радиальном двигателе. Он может состоять из одной или двух частей. При использовании этого типа коленчатого вала предусмотрены два коренных подшипника (по одному на каждом конце).Двухходовой или 180 ° коленчатый вал используется на двухрядных радиальных двигателях. В двигателе радиального типа предусмотрен один ход на каждый ряд цилиндров.
Балансировка коленчатого вала
Чрезмерная вибрация в двигателе не только приводит к усталостному разрушению металлических конструкций, но также вызывает быстрый износ движущихся частей. В некоторых случаях чрезмерная вибрация вызвана несбалансированным коленчатым валом. Коленчатые валы сбалансированы для статического и динамического баланса.Коленчатый вал статически сбалансирован, когда вес всего узла кривошипов, щек кривошипа и противовесов уравновешен вокруг оси вращения. При проверке статического равновесия его кладут на два лезвия. Если во время теста вал имеет тенденцию повернуться в одно положение, это означает, что он не сбалансирован.
Динамические амортизаторы
Коленчатый вал динамически уравновешивается, когда все силы, создаваемые вращением коленчатого вала и импульсами мощности, уравновешиваются внутри себя, так что при работе двигателя возникает небольшая вибрация или ее отсутствие.Чтобы свести к минимуму вибрацию во время работы двигателя, на коленчатый вал встроены динамические амортизаторы. Динамический демпфер — это просто маятник, прикрепленный к коленчатому валу так, что он может свободно двигаться по небольшой дуге. Он встроен в узел противовеса. Некоторые коленчатые валы содержат два или более таких узла, каждый из которых прикреплен к отдельной щеке кривошипа. Расстояние, на которое маятник движется и, следовательно, частота его колебаний соответствует частоте импульсов мощности двигателя.Когда частота колебаний коленчатого вала возникает, маятник колеблется вне времени с вибрацией коленчатого вала, таким образом снижая вибрацию до минимума.
Рисунок 1-9. Принципы динамического демпфера.
Конструкция динамического демпфера, используемого в одном двигателе, состоит из подвижного стального противовеса с прорезями, прикрепленного к щеке кривошипа. Два стальных шпильки в форме катушки входят в прорезь и проходят через большие отверстия в противовесе и щеке кривошипа. Разница в диаметре штифтов и отверстий создает эффект маятника.Аналог действия динамического демпфера показан на рисунке 1-9.
Летный механик рекомендует
Плоские коленчатые валы по сравнению с поперечными коленчатыми валами
Плоскость Коленвалы ничего нового.
Однако, с недавним представлением Shelby GT350 и GT350R, плоская конструкция коленчатого вала привлекла гораздо больше внимания. И это тоже вызывает несколько вопросов. А именно, что такое плоский коленчатый вал? Чем он отличается от коленчатого вала с крестовиной? И каковы преимущества плоского коленчатого вала?
В этой статье мы рассмотрим плоские коленчатые валы иколенчатые валы крестовины. Мы начнем с кривошипа с поперечной плоскостью, поскольку вы, возможно, немного больше знакомы с этой конструкцией.
Коленчатые валы с крестообразным шлицем
Коленчатый вал с поперечной плоскостью используется почти во всех серийных двигателях V8, продаваемых сегодня в Америке.
На кривошипе с поперечной плоскостью четыре шейки кривошипа расположены с интервалом в 90 градусов (см. Изображение слева). Когда вы смотрите на коленчатый вал этого типа вдоль его оси с любого конца, он напоминает знак плюса. Отсюда и название crossplane.
При использовании традиционного порядка зажигания V8 GM, AMC, Mopar и большинства двигателей Ford OHV V8 (1-8-4-3-6-5-7-2) коленчатый вал в поперечной плоскости будет давать неравномерно расположенные зажигания внутри каждого двигателя. сторона (или ряд цилиндров), но обеспечивает баланс между двумя рядами. Это то, что придает американским маслкарам характерный булькающий звук, хотя есть некоторая жертва в количестве выхлопных газов.
Базовая конфигурация коленчатого вала с крестообразным шлицем, если смотреть спереди.(изображение любезно предоставлено e31.net)
Еще одна отличительная особенность коленчатого вала с крестообразным шлицем — противовесы. Эти противовесы необходимы для поддержания правильной балансировки двигателя и предотвращения его раскачивания вверх и вниз. Это снижает вибрацию (проблема многих плоских коленчатых валов) и способствует более плавной работе; однако он также добавляет вращательную массу, что делает этот коленчатый вал менее желательным для действительно высокооборотных двигателей.
Это подводит нас к плоскому коленчатому валу.
Плоские коленчатые валы
Плоский коленчатый вал, используемый в новом двигателе 5,2 л, является первым в серийном двигателе Ford, но плоские кривошипы существуют всегда.
Плоские коленчатые валы имеют две пары шейек, расположенных на 180 градусов друг от друга. Если смотреть с любого конца, эти коленчатые валы выглядят плоскими (см. Рисунок внизу справа). Независимо от порядка запуска, плоские двигатели всегда будут переключаться между двумя рядами цилиндров.Это обеспечивает более эффективную очистку выхлопных газов без необходимости перехода первичных оболочек заголовка и из одного банка в другой. Это также придает новому Shelby GT350 звук, совершенно отличный от звука других американских автомобилей, как показано на этом видео:
Еще одна вещь, которая отличает плоский коленчатый вал от кривошипа с крестообразным шлицем , — это отсутствие массивных противовесов. Без дополнительной массы противовесов более легкие кривошипы с плоской плоскостью будут вращаться легче, чем их аналоги с поперечной плоскостью, что делает их более идеальными для работы с высокими оборотами и высокими оборотами.Обратной стороной является то, что плоские коленчатые валы имеют тенденцию создавать большую вибрацию в двигателе без помощи противовесов.
Вид плоского коленчатого вала спереди (изображение любезно предоставлено e31.net).
Плоские коленчатые валы обычно используются на гоночных автомобилях и дорогих экзотических автомобилях из-за их характеристик на высоких оборотах. В большинстве случаев водители гоночных автомобилей не возражают против небольшой дополнительной вибрации в их двигателе, а компании, занимающиеся экзотическими автомобилями, будут тратить деньги на более легкие материалы, чтобы уменьшить вибрацию в уличных автомобилях.Поскольку плоский 5,2-литровый V8 будет использоваться в моделях GT350 / GT350R высшего класса, мы ожидаем, что многие из этих проблем с вибрацией также будут решены компанией Ford.
У большинства плоских коленчатых валов ход короче, чем у крестообразных. Это означает, что требуется меньше места в картере; однако более короткие ходы часто приводят к снижению выходного крутящего момента.
Итог
Поперечный коленчатый вал Преимущества: Плавная работа без вибрации; характерный американский маслкар.
Поперечный коленчатый вал Недостатки: Тяжелее (труднее проверять), требуется больший картер.
Плоский коленчатый вал Преимущества: Более легкий, компактный, более отзывчивый (высокие обороты), лучшая продувка выхлопных газов.
Плоский коленчатый вал Недостатки: Склонность к вибрации, более низкие уровни крутящего момента.
Автор: Дэвид Фуллер
Дэвид Фуллер — управляющий редактор OnAllCylinders.За свою 20-летнюю карьеру в автомобильной промышленности он освещал различные гонки, шоу и отраслевые мероприятия, а также написал статьи для нескольких журналов. Он также сотрудничал с ведущими и отраслевыми изданиями по широкому кругу редакционных проектов. В 2012 году он помог основать OnAllCylinders, где ему нравится освещать все аспекты хот-роддинга и гонок.
Наш Mitsubishi Delica Space Gear 1994 года выпуска, также известный как TBD Tractor, только что получил новый топливный бак дальнего действия.Этот автомобильный бак дальнего действия, привезенный компанией Long Range America, увеличивает наш запас топлива и значительно расширяет ассортимент нашей Delica. На самом деле, вот видео об этом.
Читать дальше →
Мы доработали передний и задний бамперы Coastal Offroad с высоким клиренсом (с защитной пластиной и откидным держателем для шин / канистр)! Мы подумали, что сделаем видео-обзор, демонстрирующий преимущества бамперов Coastal Offroad Delica для езды по бездорожью, кемпинга и ношения дополнительного снаряжения.
Читать дальше →
* Обновлено 10.12.20 Канадская компания Coastal Offroad производит различные комплекты сварных передних и задних бамперов для фургонов Mitsubishi Delica Space Gear. Coastal Offroad, или CO, производит комплекты для Delica L400 серий 1 и 2. Наш Space Gear 1994 года, известный как TBD Tractor, представляет собой модель серии 1. Обновленная серия 2 Delica Space…
Читать дальше →
Нам задают много вопросов о нашем парке автомобилей JDM (внутренний рынок Японии).Но больше всего спрашивают, как найти запчасти. Иногда бывает непросто найти эту труднодоступную деталь для вашего автомобиля JDM, но есть способы найти запчасти для вашей Delica,…
Читать дальше →
В течение многих лет мы видели эти ступеньки, которые просто цепляются за дверную защелку, и вы можете использовать их как ступеньку. Честно говоря, мы всегда думали, что это хорошая идея. Недавно люди из SUV Doorstep обратились к нам и прислали нам образец.
Читать дальше →
К настоящему времени вы, возможно, знаете, что у нас в конюшне есть фургон Mitsubishi Delica Space Gear (L400) 1994 года выпуска 4 × 4.И, конечно же, под «стабильным» я подразумеваю дорогу, на которой находились проекты JDM 4WD Mitsubishi 90-х годов. Возможно, вы не знаете, что мы снова сотрудничаем с Тимом Эстердалом из Pickup Truck + SUV. Поговорите с…
Читать дальше →
Поскольку электрические вещи ломаются и нуждаются в ремонте в нашем небольшом парке автомобилей JDM 1990-х годов, в частности, в наших Mitsubishi Pajeros 1991 и 1992 годов и Delica Space Gear 1994 года, это иронично, как много я мог бы сейчас использовать местную Radio Shack. Разъемы, проводка, конденсаторы — все в одном магазине, открытом семь дней в неделю.А вот обычные магазины…
Читать дальше →
Мы имели удовольствие снова быть гостями на радио YAK с Дэйвом Столлом 20 сентября 2020 года. Шоу Дэйва, которое транслируется на KCBQ The ANSWER FM 96.1 / AM 1170 в Сан-Диего, затрагивает множество автомобильных тем. На этот раз мы поговорим о нашем фургоне Mitsubishi Delica Space Gear 1994 года, а также о множестве других необычных тем о транспортных средствах. Эй, он явно нас хорошо знает!
Шоу длится около часа, и мы всегда отлично проводим время за 60 минут с Дэйвом.Наслаждаться.
Чуть больше года назад на нашем Mitsubishi Pajero XR-II 1992 года выпуска, также известном как трактор Ralli, треснул блок из-за загрязнения термостата.
Роторный двигатель — устройство, особенности и принцип работы
Когда автомобили с поршневыми двигателями внутреннего сгорания уже широко распространились по всему миру, некоторые инженеры попытались разработать роторные двигатели, такие же эффективные и мощные. Существенных успехов добились специалисты из Германии, что неудивительно, ведь именно в этой стране изобрели автомобиль.
Немного истории
В 1957 году свет увидел первый роторно-поршневой двигатель. Впоследствии он был назван именем одного из разработчиков — Феликса Ванкеля. Второй человек, Вальтер Фройде, участвующий в процессе изобретения, незаслуженно попал в тень соавтора. Оба инженера были представителями немецкой компании NSU, производившей авто и мототехнику.
Годом позднее выпустили первый автомобиль с РПД. К сожалению, даже главных конструкторов модель новой машины не удовлетворила. Дви́гатель доработали, и в конце 60-х годов на свет появился седан, получивший звание «Авто года». Это был Ro-80 той же компании NSU. До 100 км он разгонялся всего за 12,8 с, развивал скорость до 180 км/ч, а весил немногим больше тонны. По тем временам это были грандиозные показатели. Лицензию на производство роторных моторов стали сразу же приобретать одна автомобильная компания за другой.
Неизвестно, как сложилась бы судьба изобретения Ванкеля, если бы в 1973 году не начался энергетический кризис, и цены на нефть резко повысились. Роторный двигатель внутреннего сгорания съедал слишком много топлива, поэтому от его применения начали отказываться.
В конце 90-х авто с моторами Ванкеля выпускали только Россия и Япония. Российские автомобили ВАЗ, оснащенные РПД, малоизвестны, а вот японским моделям удалось добиться мировой популярности.
В настоящее время автомобили с роторными двигателями производит лишь компания Mazda. Японским специалистам удалось усовершенствовать автомобильный мотор до такой степени, что он стал потреблять в 2 раза меньше масла и на 40% меньше топлива. Токсичность выхлопов также сократилась, и двигатель теперь соответствует европейским экологическим стандартам. Новым витком в развитии РПД стало применение водорода в качестве топлива.
Основы устройства роторного двигателя
Чтобы понять, как работает роторный двигатель, надо разобраться с его устройством. Две важные детали РПД — ротор и статор. Ротор, установленный на валу, вращается вокруг неподвижной шестерни — статора. Соединение с шестерней происходит посредством зубчатого колеса. Делают ротор из легированной стали и помещают в цилиндрический корпус.
Ротор двигателя в поперечном срезе имеет треугольную форму, его грани выпуклые, а три вершины постоянно контактируют с внутренней поверхностью корпуса. Таким образом, пространство цилиндра разделяется на три камеры. В результате вращения объем камер меняется. В определенный момент, из-за особенностей формы профиля корпуса, камер становится четыре.
На первом этапе в одну из камер через отверстие (впускное окно) запускается топливо.
Далее объем камеры с топливом уменьшается, впускное окно полностью закрывается и начинается сжатие топлива.
На следующем этапе образуется четыре камеры, срабатывают свечи (их две), происходит возгорание топлива, и совершается полезная работа мотора.
При дальнейшем вращении ротора открывается выпускное окно, в которое выходят продукты горения (выхлопные газы).
Как только выпускное окно закрывается, открывается впускное отверстие и цикл повторяется.
Один рабочий цикл совершается за один полный оборот вала. Чтобы поршневой двигатель совершил такую же работу, он должен быть двухцилиндровым.
Для обеспечения герметичности на вершинах ротора устанавливают уплотнительные пластины. К цилиндру их придавливают пружины и центробежная сила, добавляется также давление газа.
Чтобы лучше понять, как устроен роторный двигатель, и что это такое вообще, необходимо изучить схему. На ней представлено поперечное сечение агрегата и процессы, происходящие при движении ротора. Схема роторного мотора показывает, какие этапы проходит ротор, играющий роль поршня.
Типы роторных двигателей
Древнейшие роторные двигатели — это водяные мельницы, в которых колесо вращается от действия воды и передает энергию валу. Устройство современно роторного двигателя, работающего на топливе, значительно сложнее. В нем камера может быть:
герметично закрыта;
постоянно контактировать с внешней средой.
Первый тип устройств применяют на средствах передвижения, а второй в газовых турбинах. Двигатели с закрытой камерой в свою очередь разделяются на несколько видов. Классификация роторных моторов следующая.
Ротор вращается попеременно то в одну, то в другую сторону, его движение неравномерно.
Вращение происходит в одну сторону, но скорость меняется, движение пульсирующее.
Двигатели с уплотнительными заслонками, сделанными в виде лопастей.
Равномерно вращающийся ротор с заслонками, которые движутся вместе с ротором и выполняют функцию уплотнителя.
Двигатели с ротором, совершающим планетарное движение.
Существует также еще два вида типа роторных двигателей, в которых главный элемент равномерно вращается. Они отличаются организацией рабочей камеры и конструкцией уплотнителей. Двигатель Ванкеля относится к пятому пункту из представленного выше списка.
Преимущества РПД
Рассмотрев устройство роторного двигателя и принцип работы, можно понять, что он полностью отличается от поршневого. Роторный двигатель внутреннего сгорания более компактный, состоит из меньшего количества деталей, а его удельная мощность больше, чем у поршневого мотора.
РПД легче уравновесить, чтобы свести вибрации к минимуму. Это позволяет устанавливать его на легкий транспорт, например, микроавтомобили.
Количество деталей меньше, чем у поршневого двигателя почти в 2 раза. Размеры тоже значительно меньше, и такое преимущество упрощает развесовку по осям, позволяет добиться большей устойчивости на дороге.
Традиционный поршневой двигатель совершает полезную работу только за два оборота вала, а в роторном двигателе полезная работа совершается за один оборот ротора. Это является причиной быстрого разгона автомобилей с РПД.
Высокий расход топлива РПД
Устройство и принцип работы роторного двигателя на удивление просты, понятны и остроумны. Почему же он не получил распространения подобно поршневому ДВС? Не последнее место здесь занимает экономичность.
Роторный двигатель внутреннего сгорания потребляет слишком много топлива. При объеме всего 1,3 литра на каждые 100 км уходит почти 20 литров бензина. По этой причине запускать массовое производство автомобилей с РПД решились не многие компании.
В свете последних событий на Ближнем Востоке, когда за ресурсы ведется ожесточенная война, а цены на нефть и газ остаются по-прежнему довольно высокими, ограниченное применение РПД вполне понятно.
Другие важные недостатки
Следующим недостатком роторно-поршневого двигателя является быстрый износ уплотнителей, расположенных по ребрам ротора. Износ этот происходит по причине быстрого вращения, и как следствие, трения ребер о стенки камеры.
В дополнение к этому усложняется система смазки ребер. Компания Мазда сделала форсунки, которые впрыскивают масло в камеру сгорания. В связи с этим требования к качеству масла повысились. Постоянной обильной смазки также требует главный вал, вокруг которого происходит движение.
Техническое решение вопросов смазки требовало особого подхода, и справиться с задачей смогли только японские инженеры после долгих лет экспериментов.
Температура выхлопных газов у РПД выше, чем у поршневого двигателя. Это связано с относительно малой длиной рабочего хода грани ротора. Процесс горения едва успевает закончиться, как грань уже переместилась настолько, что открывается выпускное окно. В результате в выхлопную трубу выходят газы, которые полностью не передали давление ротору, и температура их высока. В атмосферу также попадает небольшая часть недогоревшей топливной смеси, что отрицательно сказывается на окружающей среде.
В роторном двигателе сложно обеспечить герметичность камеры сгорания. В процессе работы стенки статора неравномерно разогреваются и расширяются. В результате возможны утечки газа. Особенно нагревается та часть, в которой происходит сгорание. Чтобы справить с этой проблемой, различные части делают из разных сплавов. Это в свою очередь усложняет и удорожает процесс производства двигателей.
На стоимость производства роторно-поршневых двигателей Ванкеля не лучшим образом влияет сложная форма камеры. На самом деле у цилиндра не овальное сечение, как иногда говорят. Сечение имеет форму эпитрохоида и требует высокоточного исполнения.
Итак, становится понятно, что у роторного двигателя есть плюсы и минусы. Их можно свести в следующую таблицу.
Достоинства
Недостатки
Хорошая сбалансированность
Высокий расход топлива, особенно на малых оборотах
Минимальные вибрации
Нарушение герметичности из-за перегрева
Быстрый разгон
Требует частой замены масла (каждые 5 тысяч км)
Компактные размеры
Быстрый износ уплотнителей
Высокая мощность
Дороговизна производства некоторых деталей
Небольшое количество основных деталей
Повышенный уровень выброса CO2
Из-за быстрого износа деталей ресурс роторного двигателя составляет около 65 тыс. км. Для сравнения ресурс традиционного двигателя внутреннего сгорания в 2, а то и в 3 раза больше. Обслуживание роторно-поршневых двигателей требует большей ответственности, поэтому они привлекают внимание преимущественно профессионалов. Частично инженерам удалось устранить недостатки автомобилей с РПД, но некоторые из них все же остались.
Роторно-поршневые двигатели Мазды
В то время как другие мировые производители отказались от производства роторных двигателей, корпорация Mazda продолжила работу над ними. Ее специалисты усовершенствовали конструкцию и получили мощный мотор, способный конкурировать с лучшими европейскими агрегатами.
Работать с роторно-поршневым двигателем японцы начали еще в 1963 году. Они выпустили несколько моделей автобусов, грузовиков и легковых авто.
С 1978 по 2003 год компания производила знаменитый спорткар RX-7. Его приемником стала модель RX-8, получившая более 30 наград на международных моторных выставках.
На RX-8 был установлен двигатель Renesis (Rotary Engine Genesis). В разной комплектации автомобиль продавался по всему миру. Самые мощные модели (250 л. с., 8,5 тыс. оборотов в минуту) продавали в Северной Америке и Японии. В 2007 годы в Токио на автосалоне представили концепт кар с мотором Renesis II мощность 300 л. с.
В 2009 году автомобили Мазда с роторным мотором были запрещены в Европе, поскольку выброс углекислого газа превышал существующие на тот момент нормы. В 2102 году массовое производство японских автомобилей с роторными двигателями было прекращено. На данный момент РПД от компании Mazda устанавливают только на спортивные гоночные автомобили.
устройство, принцип работы, преимущества и недостатки
Роторный двигатель (РПД или роторно-поршневой двигатель), в отличие от традиционного поршневого ДВС, проще в плане конструкции. Также данный тип силовой установки имеет более высокий КПД. Соответственно, даже при небольшом рабочем объеме «отдача» от такого мотора достаточно высокая.
При этом РПД не получил широкого распространения в автомобильной индустрии. К сожалению, даже с учетом всех преимуществ, агрегат также имеет целый ряд недостатков. Далее мы рассмотрим, как устроен и работает роторный мотор, а также его сильные и слабые стороны.
Содержание статьи
Роторный двигатель: устройство и принцип работы РПД
Итак, роторный двигатель, который также называют двигатель Ванкеля в честь его создателя, представляет собой достаточно обособленный тип ДВС. При этом данный вид двигателей устанавливался на разные авто (например, роторный двигатель ВАЗ, роторный двигатель Мазда и т.д.), однако в большей степени популяризировали агрегат именно Mazda благодаря спорткару Мазда RX‑8 с роторным двигателем 13B-MSP.
Если коротко, в обычном поршневом моторе энергию от сгорания топлива в цилиндрах преобразует в возвратно-поступательное движение громоздкая поршневая группа, после чего происходит дальнейшее преобразование во вращательное движение (вращение коленвала).
В свою очередь, в роторном моторе нет ЦПГ, преобразование энергии происходит фактически «напрямую», то есть практически без потерь. Само собой, на Мазда роторный двигатель стал достаточно мощным «сердцем» с выдающимися характеристиками.
Примечательно то, что бензиновый атмосферный роторный мотор с рабочим объемом всего лишь 1.3 литра (13B-MSP) с 2 роторами в виде секций выдавал 192 лошадиных силы. В то же время его форсированная версия позволяла снять уже 231 «лошадку».
Если рассматривать конструкцию, двигатель получил 5 корпусов, в результате чего были образованы 2 камеры. Указанные камеры, подобно цилиндрам, предназначены для сгорания топливно-воздушной смеси. Энергия сгорания топлива вращает роторы, которые закреплены на эксцентриковом валу, который напоминает коленвал обычного ДВС.
При этом движение ротора сложное, так как ротор не вращается, а фактически «обкатывается» своей внутренней шестерней вокруг стационарной шестерни, которая прикреплена в центре одной из боковых стенок камеры. Сам эксцентриковый вал проходит через все корпуса и стационарные шестерни. Вращение ротора, точнее, его вращательное движение происходит так, что на 1 его оборот приходится 3 оборота эксцентрикового вала.
Еще примечательно то, что хотя в роторном моторе также есть циклы впуска, сжатия, рабочего такта и выпуска, механизм ГРМ максимально упрощен. Отсутствует привод газораспределительного механизма, нет распределительных валов, а также и самих клапанов.
Все необходимые функции реализованы счет впускных и выпускных окон, которые выполнены в боковых стенках. На деле, ротор во время вращения открывает, а также закрывает эти окна. Чтобы было понятно, давайте рассмотрим принцип работы роторного двигателя на примере агрегата с одной секцией.
Итак, боковые стороны ротора вместе со стенками корпусов формируют рабочую полость. Кода ротор двигателя находится в начальном положении, по объему полость небольшая (это начало такта впуска). Далее, вращаясь, ротор, открывает впускные окна, в результате в камеру попадает рабочая топливная смесь. Когда полость достигает максимального объема, ротор перекроет впускные окна, после чего начнется такт сжатия (полость начнет уменьшаться).
В момент, когда объем полости снова минимален, за счет искры от свечи произойдет воспламенение смеси и начнется рабочий такт. Далее энергия сгорания топлива вращает ротор, после чего ротор перейдет в положение, при котором открываются выпускные окна (осуществляется выпуск отработавших газов). После выпуска весь цикл повторяется.
Другие полости будут работать точно так же. С учетом того, что полостей 3, за один оборот ротора произойдет 3 рабочих такта. Более того, эксцентриковый вал вращается быстрее ротора в 3 раза. Результат — по одному рабочему такту на один оборот вала мотора с одной секцией. Вполне очевидно, что поршневой четырехтактный ДВС с одним цилиндром имеет соотношение в 2 раза ниже по сравнению с роторным.
Получается, если сопоставить число рабочих тактов на оборот вала, тогда двухсекционный 13B-MSP напоминает обычный поршневой мотор на 4 цилиндра, однако при объеме 1. 3 л двигатель такой же мощный, как и поршневой агрегат с объемом чуть более 2.5 литров. Еще добавим, что роторный мотор имеет намного более высокую детонационную стойкость, что позволяет превратить этот мотор в двигатель на водороде.
Конструктивные особенности роторного мотора
Хотя роторный мотор конструктивно имеет меньше деталей, его принцип работы несколько сложнее. Также в устройстве роторного двигателя применены элементы из разных материалов (чугун, алюминий). Еще имеются особые покрытия (например, хром).
Статоры (корпусы роторов) имеют металлические вставки из особой стали, интегрированные в алюминиевый корпус. На деле, статор больше похож на цилиндр с хонингованной гильзой. В свою очередь, боковые корпусы выполнены из чугуна, в них сделаны впускные и выпускные окна. На крайних статорах крепятся шестерни.
Сам ротор является поршнем и шатуном, сделан из облегченного чугуна. Н каждой стороне ротора есть камера сгорания и уплотнители для сохранения герметичности. Во внутренней части ротора стоит роторный подшипник, напоминающий вкладыш коленвала.
На обычном поршне традиционного ДВС поршень имеет 3 кольца – пара компрессионных и маслосъемное кольцо. В свою очередь, ротор имеет апексы (уплотнители вершин ротора). Апексы играют роль компрессионных колец. Указанные элементы прижимаются к стенке статора пружиной, а также они прижаты за счет центробежной силы.
Функцию второго пояса компрессионных колец выполняют боковые, а также угловые уплотнения. Они тоже прижимаются пружинами. Эти боковые уплотнители выполнены из металлокерамики, в то же время угловые уплотнители чугунные. Дополнительно имеются уплотнения для изоляции, чтобы отработавшие газы не попадали во впускные окна через зазоры, которые образуются между самим ротором и боковым корпусом соответственно.
Еще с двух сторон ротора имеются особые масляные уплотнения (по аналогии с маслосъемными кольцами), которые удерживают масло, поступающее во внутреннюю полость ротора для охлаждения.
Кстати, система смазки роторного ДВС сложная, включает в себя радиатор охлаждения масла, а также целую группу из нескольких типов масляных форсунок. Форсунки интегрированы в эксцентриковый вал для охлаждения роторов, также они установлены в статоры.
Еще масло подается и в рабочую полость, смешиваясь с горючей смесью и выгорая вместе с топливным зарядом. На деле, роторный мотор весьма требователен к качеству масла. Если заливать неподходящую смазку, агрегат коксуется, возникает детонация и т.д.
Также добавим, что система питания простая, есть несколько форсунок (пара форсунок перед впускными окнами, а также во впускном коллекторе). Что касается зажигания, использованы две свечи на один ротор. Это сделано по причине того, что камеры сгорания сами по себе получились длинными. В результате, чтобы добиться равномерного и полноценного сгорания смеси, используют две свечи, причем их электроды отличаются. При замене свечей важно обращать на это внимание.
Недостатки роторного двигателя
На старте продаж роторная Мазда пользовалась активным спросом, так как автомобиль привлекал автолюбителей своим необычным и мощным двигателем (особенно форсированные версии с мощностью около 500 л. с.). Однако немного позже владельцы уже на относительно небольших пробегах столкнулись с первыми проблемами и минусами данного типа ДВС.
Основные недостатки — большой расход топлива и относительно низкий ресурс роторного двигателя 13B-MSP. В идеальных условиях силовая установка данного типа способна выходить около 100 тыс. км пробега. Что касается реальной эксплуатации, часто моторы приходили в негодность уже к 50-60 тыс. км. пробега.
Обычно первыми выходят из строя уплотнения ротора. Причина вполне очевидна, так как уплотнения находятся под высокими нагрузками и сильно нагреваются. Также дает о себе знать и детонация, износ подшипников эксцентрикового вала, роторов и т.д.
Примечательно то, что первыми сдаются апексы (уплотнения на торцах), тогда как боковые уплотнители ходят намного дольше. В результате износа апексов, а также их установочных мест на роторе, в двигателе падает компрессия, углы уплотнителей могут отваливаться, повреждая поверхности статора.
Также следует отметить быстрый выход из строя коренных вкладышей эксцентрикового вала. С учетом того, что вал осуществляет вращение в 3 раза быстрее роторов, роторы несколько смещаются по отношению к стенкам статора, причем вершины роторов должны всегда быть удалены на одно расстояние от стенок.
Рекомендуем также прочитать статью о том, что такое гибридный двигатель автомобиля. Из этой статьи вы узнаете, как устроен и работает двигатель гибрид, а также что нужно знать о гибридном двигателе перед покупкой автомобиля с силовой установкой данного типа.
В результате, когда углы апексов выпадают, на поверхности статора неизбежно появляются задиры. При этом диагностика роторного двигателя сильно затруднена, так как, в отличие от обычного мотора, роторный двигатель не стучит в случае износа вкладышей.
Параллельно отметим, что на версиях данного мотора с наддувом работа агрегата на обедненной смеси приводит к перегреву апекса. Далее пружина, прижимающая апекс, просто гнет его и компрессия сильно снижается. Еще форсированные (роторные двигатели с наддувом) отличаются неравномерным нагревом корпуса.
В верхней части ДВС, где происходят такты впуска и сжатия, более холодные. В то же время нижняя часть, где протекает процесс сгорания смеси и выпуска раскаленных газов, нагревается намного сильнее. Результат – деформация корпуса форсированных версий.
Также отметим, что отдельно проявились и проблемы системы смазки. На практике, масляные форсунки в статоре часто загрязняются и перестают работать. При этом промыть клапаны форсунок не получается, то есть нужна замена. Если же вовремя проблема не была установлена, масляное голодание становится причиной сильного износа целого ряда элементов роторного двигателя.
При этом во всех случаях и независимо от причины, статор на практике восстановить практически не представляется возможным, а также следует отметить отсутствие ремонтных запчастей. Это значит, что если статор поврежден, восстановить двигатель очень сложно и дорого. То же самое касается и ротора. Если пазы под апексы повреждены, отремонтировать деталь практически невозможно.
Все это означает, что мотор фактически «одноразовый» и качественно его отремонтировать нет возможности. Единственный выход – покупка и установка нового двигателя, так как контрактные варианты в большинстве случаев тоже будут изношены и долго не прослужат. Само собой, купить роторный двигатель без пробега можно, но цена роторного двигателя будет высокой.
Советы и рекомендации
Прежде всего, роторный двигатель необходимо «кормить» только качественным высокооктановым бензином (не ниже АИ-98). Только качественное топливо позволяет избежать детонации, а также замедляет процесс накопления нагара на электродах свечей зажигания.
Еще следует помнить, что этот мотор предельно чувствителен не только к качеству, но и типу масла. Например, не рекомендуется лить синтетику, так как быстро скапливается нагар на апексах, компрессия падает. Заливать в такой мотор следует исключительно рекомендуемое самим производителем масло или подходящую по всем допускам «минералку».
Также замену масла нужно производить часто, масло в роторном моторе меняют каждые 4-5 тыс. км. Еще важно своевременно менять воздушный фильтр двигателя, так как его загрязнение может привести к закоксовке масляных форсунок системы смазки. Что касается свечей зажигания, лучше производить их замену каждые 10-15 тыс. км.
Как правило, основным признаком проблем роторного мотора является потеря компрессии, которая проявляется в затрудненном холодном пуске. Далее неполадки прогрессируют, мотор начинает плохо заводиться как на «холодную», так и на «горячую». Обычно в таком случае очевиден износ апексов, скопление отложений на электродах свечей зажигания и т.д.
В подобной ситуации необходимо срочно отправляться на диагностику к специалистам по ремонту ДВС данного типа. На практике, хотя ремонт сложный и дорогой, в последнее время в СНГ появилось несколько центров, специализирующихся на дефектовке и ремонте роторного двигателя с гарантией.
Как правило, в рамках ремонта выполняется замена статоров, уплотнений роторов, самих роторов и т. д. Конечно, ремонт не дешевый, но однозначно более доступный по сравнению с покупкой нового силового агрегата.
Напоследок отметим, как и поршневой двигатель, роторный мотор нуждается в прогреве перед поездкой. При этом пока мотор не выйдет на рабочие температуры, нагружать агрегат не следует. При таком подходе, а также в сочетании с качественным бензином и маслом, а также своевременном обслуживании, есть все шансы, что роторный двигатель Mazda RX-8 пройдет без ремонта около 80 или даже 100 тыс. км.
Подведем итоги
С учетом приведенной выше информации становится понятно, почему роторный двигатель не получил широкого распространения даже с учетом целого ряда преимуществ. Прежде всего, небольшой ресурс, необходимость частого и затратного облуживания, а также сложность ремонта РПД являются серьезными недостатками силовых установок данного типа.
Рекомендуем также прочитать статью о том, что такое двигатель на водороде. Из этой статьи вы узнаете, какие особенности имеет водородный двигатель, а также какие перспективы имеет двигатель на водороде.
По этой причине следует отдельно изучить все нюансы, рассмотренные выше, особенно если к покупке рассматривается автомобиль с роторным двигателем. Например, Мазда RX-8 на вторичном рынке может показаться отличным вариантом, так как данные авто продаются по привлекательной цене на фоне конкурентов с аналогичными характеристиками.
Однако на практике такой автомобиль может требовать замены или серьезного и дорогостоящего ремонта силового агрегата. Более того, даже если с двигателем все в порядке, не стоит рассчитывать на большой ресурс, а также потенциальным владельцам следует готовиться к более высоким расходам на плановое обслуживание роторного двигателя по сравнению с форсированными поршневыми ДВС (как атмосферными, так и с наддувом).
описание, устройство и принцип работы
Не все знатоки автомобилестроения знают, что в разное время в разных странах мира, включая СССР, на авто ставились необычные роторные двигатели внутреннего сгорания. Этот уникальный агрегат имеет свою большую историю и, возможно, хорошие перспективы на применение в будущем.
Что представляет собой роторный двигатель Ванкеля
Это простой по техническому решению силовой агрегат. Вместо нескольких поршней с кольцами и шатунами, он имеет один треугольный ротор, посаженный на вал. При этом вал не коленчатый, а эксцентриковый. Камеры сгорания расположены равномерно поочередно по всему кругу вращения ротора.
Роторный двигатель
В роторном ДВС в 2 с лишним раза меньше деталей в сравнении с поршневым вариантом. Нет головки блока цилиндров с системой клапанов в её привычном виде и самой поршневой группы. Значительно меньше вес и габариты.
В настоящее время известно 5 разных типов роторных ДВС. Между собой они имеют существенные конструктивные отличия. Но главный принцип един для всех типов – ротор на эксцентриковом вале вместо поршней на кривошипно-шатунном механизме.
История создания роторного двигателя
Силовые агрегаты с ротором вместо поршневой группы получили устойчивое название «двигатель Ванкеля», по фамилии изобретателя. На самом деле в мире было разработано несколько типов роторных моторов, отличных от изобретения Ванкеля. Но первым в этой области еще в 1920-ых годах начал работать именно немецкий инженер Фридрих Ванкель.
Для двигателя требовались узлы и детали, производство которых возможно только с применением высоких технологий металлообработки, точнейшей подгонки, с чем в то время были определенные трудности. Поэтому быстро запустить изделие в серию сразу не получилось. К тому же началась Вторая мировая война, когда требовались не экспериментальные, а серийные проверенные изделия.
Работы над двигателем были завершены уже во Франции, куда попало оборудования из побежденной Германии, в 1957 году, в компании NSU под руководством инженера Вальтера Фройде.
Применение двигателя Ванкеля на Западе и в СССР
Первый роторный двигатель мощностью 57 л.с. был установлен в 1957 году на спорткар фирмы NSU «Спайдер». Спорткар развивал невероятные для того времени и такой мощности ДВС скорость – 150км/час.
Автомобиль NSU Spider
С 1963 года роторные двигатели стали использовать на серийных автомобилях для населения. Несколько лет их ставили на «Мерседесы», «Шевроле» и «Ситроены». Но двигатель показал ряд существенных недостатков. В результате производители вернулись к использованию классических, проверенных поршневых ДВС.
Настойчивее остальных оказались японские автопроизводители. Они использовали роторные ДВС на некоторых моделях «Мазда». Устранялись слабые места, увеличивался моторесурс до капремонта, снижалось потребление топлива. Однако по ряду причин и японцы вернулись к классическим ДВС . Последняя Мазда RX Spirit R с роторным двигателем сошла с конвейера в 2012 году.
В СССР первый роторный двигатель отечественного производства ставился в 1974 году на легендарную «копейку» – ВАЗ 2101.
Для его создания было организовано специальное конструкторское бюро. Прообразом служил двигатель Ванкеля. Было изготовлено около 50 опытных образцов с маркировкой ВАЗ 311. ВАЗы с ними не продавались населению, а поступили в распоряжение сотрудников ГАИ и КГБ в качестве служебных машин.
Поначалу «копейки» с этим силовым агрегатом вызывали восхищение своей мощью, динамикой разгона, низким шумом и плавностью хода. Но уже через год на ходу осталась только одна машина. Двигатели остальных вышли из строя. Основной причиной поломок стала ненадежность уплотнений, обеспечивающих герметизацию камер сгорания во время вспышки топлива.
Работы над отечественным роторным ДВС продолжались, и были созданы мощные двухсекционные ВАЗ 411 и 413 мощностью 120 и 140 л.с. “Жигули” с этими двигателями снова попали на службу в силовые структуры.
Данное достижение советского автопрома не афишировалось. В народе лишь ходили слухи о том, что сотрудники КГБ ездят на скоростных авто с невероятными секретными двигателями.
Затем были разработаны роторные двигатели ВАЗ 414 и 415. Это были более совершенные универсальные агрегаты. Их можно было ставить как на вазовские «восьмерки» и «девятки», так и на не менее популярные в то время «Москвичи» и «Волги».
Последняя разработка ВАЗ 415 так и не была использована. Ее предшественник, ВАЗ 414 с 1992 года ставился на популярной модели авто ВАЗ 2109 («Спутник», «Самара»).
«Девятки» с этими двигателями обладали необычными характеристиками. Разгон до 100 км/ч за 8 секунд, возможность длительной работы на предельно высоких оборотах. ВАЗ 414 потреблял меньше топлива (14-15 л на 100 км), чем предыдущие роторные ДВС (18-20 л на 100 км). Но все равно больше, чем поршневой мотор.
Однако и на ВАЗе роторные ДВС не смогли конкурировать с традиционными, и вскоре их использование было прекращено.
Работы над усовершенствованием роторных ДВС ведутся в мотоциклетной отрасли. В начале 1980-ых был создан мотоцикл Norton с двигателем Ванкеля, который показал невероятные результаты. Сегодня компания выпускает байки с таким двигателем объемом 588 куб.см. Ведутся работы над новым мотором с объемом 700 куб.см.
Автомобилей в такими двигателями сегодня не выпускают. Не исключено, что автопроизводители могут вести конструкторские работы в этом направлении без афиширования, втайне от конкурентов.
Устройство и принцип работы роторного двигателя
Принцип работы и устройство роторного ДВС одновременно схож с работой обычного поршневого двигателя и электродвигателя. Так же, как поршневой ДВС роторный вариант имеет камеры сгорания, системы впрыска топлива, выхлопа и зажигания. Сходство конструкции с электродвигателем в том, что ротор получает энергию при вращении внутри корпуса. (Кроме роторного ДВС с возвратно-поступательным движением вала).
Электродвигатель получает кинетическую энергию за счет перемещения электромагнитного поля. Роторный ДВС – за счет воспламенения топливно-воздушной смеси и резкого роста давления в камерах сгорания, так же, как и поршневые ДВС.
На сегодня известны 5 типов роторных моторов:
С возвратно-поступательным движением вала. В таких типах ДВС ротор и вал не делают полных оборотов вокруг оси.
Классический двигатель Ванкеля с планетарным вращением вала.
Двигатели, в которых камеры сгорания расположены по спирали.
Двигатели с равномерным вращением вала с камерами сгорания, расположенными по спирали без уплотнительных элементов.
Двигатели с пульсирующим вращением.
Как и поршневые ДВС, роторные варианты имеют 4 рабочих такта:
Впрыск топливно-возду
Роторные двигатели: принцип работы, ресурс и особенности
Роторный двигатель (РПД или роторно-поршневой двигатель), в отличие от традиционного поршневого ДВС, проще в плане конструкции. Также данный тип силовой установки имеет более высокий КПД. Соответственно, даже при небольшом рабочем объеме «отдача» от такого мотора достаточно высокая.
При этом РПД не получил широкого распространения в автомобильной индустрии. К сожалению, даже с учетом всех преимуществ, агрегат также имеет целый ряд недостатков. Далее мы рассмотрим, как устроен и работает роторный мотор, а также его сильные и слабые стороны.
Роторный двигатель: устройство и принцип работы РПД
Содержание статьи:
Итак, роторный двигатель, который также называют двигатель Ванкеля в честь его создателя, представляет собой достаточно обособленный тип ДВС. При этом данный вид двигателей устанавливался на разные авто (например, роторный двигатель ВАЗ, роторный двигатель Мазда и т.д.), однако в большей степени популяризировали агрегат именно Mazda благодаря спорткару Мазда RX‑8 с роторным двигателем 13B-MSP.
Если коротко, в обычном поршневом моторе энергию от сгорания топлива в цилиндрах преобразует в возвратно-поступательное движение громоздкая поршневая группа, после чего происходит дальнейшее преобразование во вращательное движение (вращение коленвала).
В свою очередь, в роторном моторе нет ЦПГ, преобразование энергии происходит фактически «напрямую», то есть практически без потерь. Само собой, на Мазда роторный двигатель стал достаточно мощным «сердцем» с выдающимися характеристиками.
Примечательно то, что бензиновый атмосферный роторный мотор с рабочим объемом всего лишь 1.3 литра (13B-MSP) с 2 роторами в виде секций выдавал 192 лошадиных силы. В то же время его форсированная версия позволяла снять уже 231 «лошадку».
Если рассматривать конструкцию, двигатель получил 5 корпусов, в результате чего были образованы 2 камеры. Указанные камеры, подобно цилиндрам, предназначены для сгорания топливно-воздушной смеси. Энергия сгорания топлива вращает роторы, которые закреплены на эксцентриковом валу, который напоминает коленвал обычного ДВС.
При этом движение ротора сложное, так как ротор не вращается, а фактически «обкатывается» своей внутренней шестерней вокруг стационарной шестерни, которая прикреплена в центре одной из боковых стенок камеры. Сам эксцентриковый вал проходит через все корпуса и стационарные шестерни. Вращение ротора, точнее, его вращательное движение происходит так, что на 1 его оборот приходится 3 оборота эксцентрикового вала.
Еще примечательно то, что хотя в роторном моторе также есть циклы впуска, сжатия, рабочего такта и выпуска, механизм ГРМ максимально упрощен. Отсутствует привод газораспределительного механизма, нет распределительных валов, а также и самих клапанов.
Все необходимые функции реализованы счет впускных и выпускных окон, которые выполнены в боковых стенках. На деле, ротор во время вращения открывает, а также закрывает эти окна. Чтобы было понятно, давайте рассмотрим принцип работы роторного двигателя на примере агрегата с одной секцией.
Итак, боковые стороны ротора вместе со стенками корпусов формируют рабочую полость. Кода ротор двигателя находится в начальном положении, по объему полость небольшая (это начало такта впуска). Далее, вращаясь, ротор, открывает впускные окна, в результате в камеру попадает рабочая топливная смесь. Когда полость достигает максимального объема, ротор перекроет впускные окна, после чего начнется такт сжатия (полость начнет уменьшаться).
В момент, когда объем полости снова минимален, за счет искры от свечи произойдет воспламенение смеси и начнется рабочий такт. Далее энергия сгорания топлива вращает ротор, после чего ротор перейдет в положение, при котором открываются выпускные окна (осуществляется выпуск отработавших газов). После выпуска весь цикл повторяется.
Другие полости будут работать точно так же. С учетом того, что полостей 3, за один оборот ротора произойдет 3 рабочих такта. Более того, эксцентриковый вал вращается быстрее ротора в 3 раза. Результат — по одному рабочему такту на один оборот вала мотора с одной секцией. Вполне очевидно, что поршневой четырехтактный ДВС с одним цилиндром имеет соотношение в 2 раза ниже по сравнению с роторным.
Получается, если сопоставить число рабочих тактов на оборот вала, тогда двухсекционный 13B-MSP напоминает обычный поршневой мотор на 4 цилиндра, однако при объеме 1. 3 л двигатель такой же мощный, как и поршневой агрегат с объемом чуть более 2.5 литров. Еще добавим, что роторный мотор имеет намного более высокую детонационную стойкость, что позволяет превратить этот мотор в двигатель на водороде.
Конструктивные особенности роторного мотора
Хотя роторный мотор конструктивно имеет меньше деталей, его принцип работы несколько сложнее. Также в устройстве роторного двигателя применены элементы из разных материалов (чугун, алюминий). Еще имеются особые покрытия (например, хром).
Статоры (корпусы роторов) имеют металлические вставки из особой стали, интегрированные в алюминиевый корпус. На деле, статор больше похож на цилиндр с хонингованной гильзой. В свою очередь, боковые корпусы выполнены из чугуна, в них сделаны впускные и выпускные окна. На крайних статорах крепятся шестерни.
Сам ротор является поршнем и шатуном, сделан из облегченного чугуна. Н каждой стороне ротора есть камера сгорания и уплотнители для сохранения герметичности. Во внутренней части ротора стоит роторный подшипник, напоминающий вкладыш коленвала.
На обычном поршне традиционного ДВС поршень имеет 3 кольца – пара компрессионных и маслосъемное кольцо. В свою очередь, ротор имеет апексы (уплотнители вершин ротора). Апексы играют роль компрессионных колец. Указанные элементы прижимаются к стенке статора пружиной, а также они прижаты за счет центробежной силы.
Функцию второго пояса компрессионных колец выполняют боковые, а также угловые уплотнения. Они тоже прижимаются пружинами. Эти боковые уплотнители выполнены из металлокерамики, в то же время угловые уплотнители чугунные. Дополнительно имеются уплотнения для изоляции, чтобы отработавшие газы не попадали во впускные окна через зазоры, которые образуются между самим ротором и боковым корпусом соответственно.
Еще с двух сторон ротора имеются особые масляные уплотнения (по аналогии с маслосъемными кольцами), которые удерживают масло, поступающее во внутреннюю полость ротора для охлаждения.
Кстати, система смазки роторного ДВС сложная, включает в себя радиатор охлаждения масла, а также целую группу из нескольких типов масляных форсунок. Форсунки интегрированы в эксцентриковый вал для охлаждения роторов, также они установлены в статоры.
Еще масло подается и в рабочую полость, смешиваясь с горючей смесью и выгорая вместе с топливным зарядом. На деле, роторный мотор весьма требователен к качеству масла. Если заливать неподходящую смазку, агрегат коксуется, возникает детонация и т.д.
Также добавим, что система питания простая, есть несколько форсунок (пара форсунок перед впускными окнами, а также во впускном коллекторе). Что касается зажигания, использованы две свечи на один ротор. Это сделано по причине того, что камеры сгорания сами по себе получились длинными. В результате, чтобы добиться равномерного и полноценного сгорания смеси, используют две свечи, причем их электроды отличаются. При замене свечей важно обращать на это внимание.
Недостатки роторного двигателя
Сейчас читают
На старте продаж роторная Мазда пользовалась активным спросом, так как автомобиль привлекал автолюбителей своим необычным и мощным двигателем (особенно форсированные версии с мощностью около 500 л. с.). Однако немного позже владельцы уже на относительно небольших пробегах столкнулись с первыми проблемами и минусами данного типа ДВС.
Основные недостатки — большой расход топлива и относительно низкий ресурс роторного двигателя 13B-MSP. В идеальных условиях силовая установка данного типа способна выходить около 100 тыс. км пробега. Что касается реальной эксплуатации, часто моторы приходили в негодность уже к 50-60 тыс. км. пробега.
Обычно первыми выходят из строя уплотнения ротора. Причина вполне очевидна, так как уплотнения находятся под высокими нагрузками и сильно нагреваются. Также дает о себе знать и детонация, износ подшипников эксцентрикового вала, роторов и т.д.
Примечательно то, что первыми сдаются апексы (уплотнения на торцах), тогда как боковые уплотнители ходят намного дольше. В результате износа апексов, а также их установочных мест на роторе, в двигателе падает компрессия, углы уплотнителей могут отваливаться, повреждая поверхности статора.
Также следует отметить быстрый выход из строя коренных вкладышей эксцентрикового вала. С учетом того, что вал осуществляет вращение в 3 раза быстрее роторов, роторы несколько смещаются по отношению к стенкам статора, причем вершины роторов должны всегда быть удалены на одно расстояние от стенок.
Рекомендуем также прочитать статью о том, что такое гибридный двигатель автомобиля. Из этой статьи вы узнаете, как устроен и работает двигатель гибрид, а также что нужно знать о гибридном двигателе перед покупкой автомобиля с силовой установкой данного типа.
В результате, когда углы апексов выпадают, на поверхности статора неизбежно появляются задиры. При этом диагностика роторного двигателя сильно затруднена, так как, в отличие от обычного мотора, роторный двигатель не стучит в случае износа вкладышей.
Параллельно отметим, что на версиях данного мотора с наддувом работа агрегата на обедненной смеси приводит к перегреву апекса. Далее пружина, прижимающая апекс, просто гнет его и компрессия сильно снижается. Еще форсированные (роторные двигатели с наддувом) отличаются неравномерным нагревом корпуса.
В верхней части ДВС, где происходят такты впуска и сжатия, более холодные. В то же время нижняя часть, где протекает процесс сгорания смеси и выпуска раскаленных газов, нагревается намного сильнее. Результат – деформация корпуса форсированных версий.
Также отметим, что отдельно проявились и проблемы системы смазки. На практике, масляные форсунки в статоре часто загрязняются и перестают работать. При этом промыть клапаны форсунок не получается, то есть нужна замена. Если же вовремя проблема не была установлена, масляное голодание становится причиной сильного износа целого ряда элементов роторного двигателя.
При этом во всех случаях и независимо от причины, статор на практике восстановить практически не представляется возможным, а также следует отметить отсутствие ремонтных запчастей. Это значит, что если статор поврежден, восстановить двигатель очень сложно и дорого. То же самое касается и ротора. Если пазы под апексы повреждены, отремонтировать деталь практически невозможно.
Все это означает, что мотор фактически «одноразовый» и качественно его отремонтировать нет возможности. Единственный выход – покупка и установка нового двигателя, так как контрактные варианты в большинстве случаев тоже будут изношены и долго не прослужат. Само собой, купить роторный двигатель без пробега можно, но цена роторного двигателя будет высокой.
Советы и рекомендации
Прежде всего, роторный двигатель необходимо «кормить» только качественным высокооктановым бензином (не ниже АИ-98). Только качественное топливо позволяет избежать детонации, а также замедляет процесс накопления нагара на электродах свечей зажигания.
Еще следует помнить, что этот мотор предельно чувствителен не только к качеству, но и типу масла. Например, не рекомендуется лить синтетику, так как быстро скапливается нагар на апексах, компрессия падает. Заливать в такой мотор следует исключительно рекомендуемое самим производителем масло или подходящую по всем допускам «минералку».
Также замену масла нужно производить часто, масло в роторном моторе меняют каждые 4-5 тыс. км. Еще важно своевременно менять воздушный фильтр двигателя, так как его загрязнение может привести к закоксовке масляных форсунок системы смазки. Что касается свечей зажигания, лучше производить их замену каждые 10-15 тыс. км.
Как правило, основным признаком проблем роторного мотора является потеря компрессии, которая проявляется в затрудненном холодном пуске. Далее неполадки прогрессируют, мотор начинает плохо заводиться как на «холодную», так и на «горячую». Обычно в таком случае очевиден износ апексов, скопление отложений на электродах свечей зажигания и т.д.
В подобной ситуации необходимо срочно отправляться на диагностику к специалистам по ремонту ДВС данного типа. На практике, хотя ремонт сложный и дорогой, в последнее время в СНГ появилось несколько центров, специализирующихся на дефектовке и ремонте роторного двигателя с гарантией.
Как правило, в рамках ремонта выполняется замена статоров, уплотнений роторов, самих роторов и т. д. Конечно, ремонт не дешевый, но однозначно более доступный по сравнению с покупкой нового силового агрегата.
Напоследок отметим, как и поршневой двигатель, роторный мотор нуждается в прогреве перед поездкой. При этом пока мотор не выйдет на рабочие температуры, нагружать агрегат не следует. При таком подходе, а также в сочетании с качественным бензином и маслом, а также своевременном обслуживании, есть все шансы, что роторный двигатель Mazda RX-8 пройдет без ремонта около 80 или даже 100 тыс. км.
Подведем итоги
С учетом приведенной выше информации становится понятно, почему роторный двигатель не получил широкого распространения даже с учетом целого ряда преимуществ. Прежде всего, небольшой ресурс, необходимость частого и затратного облуживания, а также сложность ремонта РПД являются серьезными недостатками силовых установок данного типа.
Рекомендуем также прочитать статью о том, что такое двигатель на водороде. Из этой статьи вы узнаете, какие особенности имеет водородный двигатель, а также какие перспективы имеет двигатель на водороде.
По этой причине следует отдельно изучить все нюансы, рассмотренные выше, особенно если к покупке рассматривается автомобиль с роторным двигателем. Например, Мазда RX-8 на вторичном рынке может показаться отличным вариантом, так как данные авто продаются по привлекательной цене на фоне конкурентов с аналогичными характеристиками.
Однако на практике такой автомобиль может требовать замены или серьезного и дорогостоящего ремонта силового агрегата. Более того, даже если с двигателем все в порядке, не стоит рассчитывать на большой ресурс, а также потенциальным владельцам следует готовиться к более высоким расходам на плановое обслуживание роторного двигателя по сравнению с форсированными поршневыми ДВС (как атмосферными, так и с наддувом).
Источник
Роторно — поршневой двигатель (двигатель Ванкеля)
Роторно-поршневой двигатель или двигатель Ванкеля представляет собой мотор, где главным рабочим элементом осуществляются планетарные круговые движения. Это принципиально другой вид двигателя, отличный от поршневых собратьев в семействе ДВС.
В конструкции такого агрегата используется ротор (поршень) с тремя гранями, внешне образующим треугольник Рело, осуществляющий круговые движения в цилиндре особого профиля. Чаще всего поверхность цилиндра исполнена по эпитрохоиде (плоской кривой, полученной точкой, которая жестко связана с окружностью, осуществляющей движение по внешней стороне другой окружности). На практике можно встретить цилиндр и ротор иных форм.
Составные элементы и принцип работы
Устройство двигателя типа РПД предельно проста и компактна. На ось агрегата устанавливается ротор, который крепко соединяется с шестерней. Последняя сцепляется со статором. Ротор, имеющий три грани, двигается по эпитрохоидальной цилиндрической плоскости. В результате чего сменяющиеся объемы рабочих камер цилиндра отсекаются с помощью трех клапанов. Уплотнительные пластины (торцевого и радиального типа) прижимаются к цилиндру под действием газа и за счет действия центростремительных сил и ленточных пружин. Получаются 3 изолированные камеры разные по объемным размерам. Здесь осуществляются процессы сжимания поступившей смеси горючего и воздуха, расширения газов, оказывающих давление на рабочую поверхность ротора и очищающих камеру сгорания от газов. На эксцентриковую ось передается круговое движение ротора. Сама ось находится на подшипниках и передает момент вращения на механизмы трансмиссии. В этих моторах осуществляется одновременная работа двух механических пар. Одна, которая состоит из шестерен, регулирует движение самого ротора. Другая — преобразует вращающиеся движение поршня во вращающиеся движения эксцентриковой оси.
Детали Роторно-поршневого двигателя
Принцип работы двигателя Ванкеля
На примере двигателей, установленных на автомобилях ВАЗ, можно назвать следующие технические характеристики: — 1,308 см3 – рабочий объем камеры РПД; — 103 кВт/6000 мин-1 – номинальная мощность; — 130 кг масса двигателя; — 125000 км – ресурс двигателя до первого полного его ремонта.
Смесеобразование
В теории в РПД применяют несколько разновидностей смесеобразования: внешнее и внутреннее, на основе жидких, твердых, газообразных видов топлива. Касательно твердых видов топлива стоит отметить, что их первоначально газифицируют в газогенераторах, так как они приводят к повышенному золообразованию в цилиндрах. Поэтому большее распространение на практике получили газообразные и жидкие топлива. Сам механизм образования смеси в двигателях Ванкеля будет зависеть от вида применяемого топлива. При использовании газообразного топлива его смешение с воздухом происходит в специальном отсеке на входе в двигатель. Горючая смесь в цилиндры поступает в готовом виде.
Из жидкого топлива смесь приготавливается следующим образом:
Воздух смешивается с жидким топливом перед поступлением в цилиндры, куда поступает горючая смесь.
В цилиндры двигателя жидкое топливо и воздух поступают по отдельности, и уже внутри цилиндра происходит их смешивание. Рабочая смесь получается при соприкосновении их с остаточными газами.
Соответственно, топливно-воздушная смесь может готовиться вне цилиндров или внутри их. От этого идет разделение двигателей с внутренним или внешним образованием смеси.
Особенности РПД
Преимущества
Преимущества двигателей роторно-поршневого типа по сравнению со стандартными бензиновыми двигателями:
— Низкие показатели уровня вибрации. В моторах типа РПД отсутствует преобразование возвратно-поступательного движения во вращательное, что позволяет агрегату выдержать высокие обороты с меньшими вибрациями.
— Хорошие динамические характеристики. Благодаря своему устройству такой мотор, установленный в машине, позволяет ее разогнать выше 100 км/ч на высоких оборотах без избыточной нагрузки.
— Хорошие показатели удельной мощности при малой массе. Из-за отсутствия в конструкции двигателя коленчатого вала и шатунов достигается небольшая масса движущихся частей в РПД.
— В двигателях такого типа практически отсутствует система смазки. Непосредственно в топливо добавляется масло. Топливно-воздушная смесь сама осуществляет смазывание пар трения.
— Мотор роторно-поршневого типа имеет небольшие габаритные размеры. Установленный роторно-поршневой мотор позволяет максимально использовать полезное пространство моторного отсека автомобиля, равномерно распределить нагрузку на оси автомашины и лучше рассчитать расположение элементов коробки передач и узлов. Например, четырехтактный двигатель такой же мощности будет в два раза больше роторного двигателя.
Недостатки двигателя Ванкеля
— Качество моторного масла. При эксплуатации такого типа двигателей необходимо уделять должное внимание к качественному составу масла, применяемого в двигателях Ванкеля. Ротор и находящаяся внутри камера двигателя имеют большую площадь соприкосновения, соответственно, износ двигателя происходит быстрее, а также такой двигатель постоянно перегревается. Нерегулярная смена масла наносит огромный урон двигателю. Износ мотора возрастает в разы из-за наличия абразивных частиц в отработанном масле.
— Качество свечей зажигания. Эксплуатантам таких двигателей приходится быть особо требовательным к качественному составу свечей. В камере сгорания из-за ее небольшого объема, протяженной формы и высокой температуры затруднен процесс зажигания смеси. Следствием является повышенная рабочая температура и периодическая детонация камеры сгорания.
— Материалы уплотнительных элементов. Существенной недоработкой мотора типа РПД можно назвать ненадежную организацию уплотнений промежутков между камерой, где сгорает топливо, и ротором. Устройство ротора такого мотора достаточно сложное, поэтому уплотнения требуются и по граням ротора, и по боковой поверхности, имеющей соприкосновение с крышками двигателя. Поверхности, которые подвергаются трению, необходимо постоянно смазывать, что выливается в повышенный расход масла. Практика показывает, что мотор типа РПД может потребить от 400 гр до 1 кг масла на каждые 1000 км. Снижаются экологичные показатели работы двигателя, так как горючее сгорает вместе с маслом, в результате в окружающую среду выбрасывается большое количество вредных веществ.
Из-за своих недоработок такие моторы не получили широкого распространения в автомобилестроении и в изготовлении мотоциклов. Но на базе РПД изготавливаются компрессоры и насосы. Авиамоделисты часто используют такие двигатели для конструирования своих моделей. Из-за невысоких требований к экономичности и надежности конструкторы не применяют сложную систему уплотнений в таких моторах, что значительно снижает его себестоимость. Простота его конструкции позволяет без проблем встроить в авиамодель.
КПД роторно-поршневой конструкции
Не смотря на ряд недоработок, проведенные исследования показали, что общий КПД двигателя Ванкеля довольно-таки высокий по современным меркам. Его значение составляет 40 – 45%. Для сравнения, у поршневых двигателей внутреннего сгорания КПД составляет 25%, у современных турбодизелей – около 40%. Самый высокий КПД у поршневых дизельных двигателей составляет 50%. До настоящего времени ученые продолжают работу по изысканию резервов для повышения КПД двигателей.
Итоговый КПД работы мотора состоит из трех основных частей:
Топливная эффективность (показатель, характеризующий рациональное использование горючего в моторе).
Исследования в этой области показывают, что только 75% горючего сгорает в полном объеме. Есть мнение, что данная проблема решается путем разделения процессов сгорания и расширения газов. Необходимо предусмотреть обустройство специальных камер при оптимальных условиях. Горение должно происходить в замкнутом объеме, при условии нарастания температурных показателей и давления, расширительный процесс должен происходить при невысоких показателях температур.
КПД механический (характеризует работу, результатом которой стало образование переданного потребителю крутящего момента главной оси).
Порядка 10% работы мотора расходуется на приведение в движение вспомогательных узлов и механизмов. Исправить данную недоработку можно путем внесения изменений в устройство двигателя: когда главный движущийся рабочий элемент не прикасается к неподвижному корпусу. Постоянное плечо крутящего момента должно присутствовать на всем пути следования основного рабочего элемента.
Термическая эффективность (показатель, отражающий количество тепловой энергии, образованной от сжигания горючего, преобразующейся в полезную работу).
На практике 65% полученной тепловой энергии улетучивается с отработанными газами во внешнюю среду. Ряд исследований показал, что можно добиться повышения показателей термической эффективности в том случае, когда конструкция мотора позволяла бы осуществлять сгорание горючего в теплоизолированной камере, чтобы с самого начала достигались максимальные показатели температуры, а в конце эта температура понижалась до минимальных значений путем включения паровой фазы.
Современное состояние роторно-поршневого двигателя
На пути массового применения двигателя встали значительные технические трудности: — отработка качественного рабочего процесса в камере неблагоприятной формы; — обеспечение герметичности уплотнения рабочих объемов; — проектировка и создания конструкции корпусных деталей, которые надежно прослужат весь жизненный цикл работы двигателя без коробления при неравномерном нагрева этих деталей. В результате огромной проделанной научно-исследовательской и опытно-конструкторской работы этим фирмам удалось решить почти все наиболее сложные технические задачи на пути создания РПД и выйти на этап их промышленного производства.
Первый массовый автомобиль NSU Spider с РПД начала выпускать фирма NSU Motorenwerke. Вследствие частых переборок двигателей из-за выше сказанных технических проблем на раннем этапе развития конструкции двигателя Ванкеля, взятые NSU гарантийные обязательства привели ее к финансовому краху и банкротству и последовавшему слиянию с Audi в 1969 году. Между 1964 и 1967 годом произведено 2375 автомобилей. В 1967 году Spider был снят с производства и заменён на NSU Ro80 с роторным двигателем второго поколения; за десять лет производства Ro80 выпущено 37398 машин.
Наиболее успешно с данными проблемами справились инженеры фирмы Mazda. Она и остается единственным массовым производителем машин с роторно-поршневыми двигателями. Доработанный мотор серийно начался ставить на автомобиль Mazda RX-7 с 1978 года. С 2003 преемственность приняла модель Mazda RX-8, она и является на данный момент массовой и единственной версией автомобиля с двигателем Ванкеля.
Российские РПД
Первое упоминание о роторном двигателе в Советском Союзе относится к 60-м годам. Исследовательские работы по роторно-поршневым двигателям начались в 1961 году, соответствующим постановлением Минавтопрома и Минсельхозмаша СССР. Промышленное же изучение с дальнейшем выводом на производство данной конструкции началось в 1974 году на ВАЗе. специально для этого было создано Специальное конструкторское бюро роторно-поршневых двигателей (СКБ РПД). Поскольку лицензию купить не было возможности, был разобран и скопирован серийный «ванкель» от NSU Ro80. На этой основе разработали и собрали двигатель Ваз-311, а произошло это знаменательное событие в 1976 году. На ВАЗе разрабатывали целую линейку РПД от 40 до 200 сильных двигателей. Доработка конструкции тянулась почти шесть лет. Удалось решить целый ряд технических проблем связанные с работоспособностью газовых и маслосъемных уплотнений, подшипников, отладить эффективный рабочий процесс в камере неблагоприятной формы. Свой первый серийный автомобиль ВАЗ с роторным двигателем под капотом представил публике в 1982 году, это был Ваз-21018. Машина внешне и конструктивно была как и все модели данной линейки, за одним исключением, а именно, под капотом стоял односекционный роторный двигатель мощностью 70 л.с. Длительность разработки не помешала случиться конфузу: на всех 50 опытных машинах при эксплуатации возникли поломки мотора, заставившие завод установить на его место обычный поршневой.
Ваз 21018 с Роторно-поршневым двигателем
Установив, что причиной неполадок являлись вибрации механизмов и ненадёжность уплотнений, конструкторы предприняли спасти проект. Уже в 83-ем появились двухсекционные Ваз-411 и Ваз-413 (мощностью, соответственно, 120 и 140 л.с.). Несмотря на низкую экономичность и малый ресурс, сфера применения роторного двигателя всё-таки нашлась – ГАИ, КГБ и МВД требовались мощные и незаметные машины. Оснащённые роторными двигателями «Жигули» и «Волги» легко догоняли иномарки.
С 80-ых годов 20 века СКБ был увлечён новой темой – применение роторных двигателей в смежной отрасли — авиационной. Отход от основной отрасли применения РПД привело к тому, что для переднеприводных машин роторный двигатель Ваз-414 создаётся лишь к 1992 году, да ещё три года доводится. В 1995 году Ваз-415 был представлен к сертификации. В отличие от предшественников он универсален, и может устанавливаться под капотом как заднеприводных («классика» и ГАЗ), так и переднеприводных машин (ВАЗ, Москвич). Двухсекционный «Ванкель» имеет рабочий объём 1308 см3 и развивает мощность 135 л.с. при 6000об/мин. «Девяносто девятую» он ускоряет до сотни за 9 секунд.
Роторно-поршневой двигатель ВАЗ-414
На данный момент проект по разработке и внедрения отечественного РПД заморожен.
Ниже представлено видео устройства и работы двигателя Ванкеля.
Что такое роторно-поршневой двигатель. Принцип работы, особенности, преимущества и недостатки
Сегодня мы узнаем, что называется роторно-поршневым двигателем автомобиля, каков его принцип работы и в чем заключается отличие мотора от классической силовой установки
ЧТО ТАКОЕ РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВАНКЕЛЯ. ПРИНЦИП РАБОТЫ, ОСОБЕННОСТИ, ПРЕИМУЩЕСТВА И НЕДОСТАТКИ
Добрый день, сегодня мы узнаем, что называется роторно-поршневым двигателем автомобиля, известным в народе, как силовая установка Ванкеля, каков его принцип работы и вчем заключается отличие мотора от классических типов. Кроме того, расскажем про то, какими преимуществами с недостатками обладает роторно-поршневой двигатель, насколько ремонтопригоден мотор, а также выгодна ли в эксплуатации и обслуживания данная силовая установка. В заключении поговорим о том, на какие современные автомобили устанавливают мотор с роторно-поршневым типом действия, а также, из каких основных и вспомогательных компонентов состоит двигатель.
Итак, что называетсяавтомобильным роторно-поршневым двигателем Ванкеля? Роторно-поршневой силовой установкой или сокращенно РПД Ванкеля называется двигатель внутреннего сгорания, в котором энергия сгорающих газов преобразуется в механическую при помощи специального ротора, совершающего вращательное или вращательно-возвратное движение относительно главного корпуса. Конструкция двигателя была разработана в 1957 году инженерами Вальтером Фройде и Феликсом Ванкелем. Силовая установка официально была запущена в массовое производство в 1959 году.
ЧТО ТАКОЕ ХОНИНГОВАНИЕ ЦИЛИНДРОВ ДВИГАТЕЛЯ
Роторно-поршневой двигатель обладает рядом конструктивных и функциональных особенностей. В такой силовой установке вместо стандартного поршня применяется трехгранный ротор, который с виду напоминает треугольник с закругленными концами. Данный своеобразный поршень имеет официальное название треугольник Рело, который вращается внутри цилиндра специального размера и формы выполненной по типу кривой плоскости, которая жестко связана с окружностью, катящейся по внешней стороне другой окружности. Справочно заметим, что двигатель Ванкеля, когда то считался мотором будущего, благодаря введению множества новаций при его разработке и производстве.
1. Особенности, конструкция, преимущества и недостатки роторно-поршневого двигателя
Благодаря уникальной особенности главного поршня, который похож на трехгранный ротор у двигателя отсутствуют преобразования возвратно-поступательного движения во вращательное. Эти моменты способствуют тому, что силовая установка способна выдерживать намного более высокие обороты в сравнении с классическим типом двигателя. Самой главной особенностью мотора Ванкеля является то, что обладая небольшим объемом камеры сгорания, двигатель выдает высокие показатели мощности. Что касается габаритов конструкции, то она опять же в сравнении с традиционным мотором, она в несколько раз меньше и содержит малое количество компонентов. Благодаря небольшому размеру двигателя оптимизируется расположение трансмиссии и следовательно улучшается развесовка узлов, что позволяет получить чуткую управляемость, а также помогает сделать автомобиль более просторным, как для водителя, так для пассажиров.
Как и любой другой двигатель, роторно-поршневой обладает своими плюсами и минусами, которые ему характерны.
К преимуществам такой силовой установки относят:
– Небольшие габариты и малый вес;
– Небольшое количество компонентов и деталей, даже в сравнении с 2-ух тактным поршневым мотором;
– Мощность в 2 раза больше при тех же размерах, чем у классического двигателя;
– Плавное функционирование, благодаря отсутствию возвратно-поступательных движений;
– Использование топлива с низким октановым числом.
К недостаткам такой силовой установки относят:
– Процедура по сгоранию топлива в камере цилиндра происходит не эффективно, что ведет к повышенному расходу топлива и высокой токсичности при выработке выхлопных газов;
– Высокий расход моторного масла, в связи со специфической конструкцией компонентов рассчитанной на прогар смазки;
– Нет возможности производить силовые установки на площадях, которые предназначены для выпуска классических двигателей;
– Для налаживания массового выпуска моторов такого типа требуется переоснащение огромного числа оборудования и оснастки, что просто невыгодно, а следовательно нецелесообразно.
Кроме того, не стоит забывать, что роторно-поршневые моторы очень склонны к перегреву, в связи с тем, что камера сгорания обладает линзовидной формой, то есть при небольшом объеме у нее довольно большая площадь. В процессе горения топливно-воздушной смеси, главные потери энергии происходят через излучение, интенсивность,которого пропорционально 1/4 степени от общего показателя температуры. Если данный нюанс рассматривать с точки зрения снижения удельной поверхности за счет потерь теплоты, то идеальной формой камеры сгорания должна быть сфера, то есть шар. Таким образом, образованная в процессе сгорания мощная энергия не только бесполезно выходит из камеры, то и ведет к тому, что происходит перегрев рабочей области цилиндра. Однако, если взглянуть на конструкцию и строение роторно-поршневого двигателя, то он просто удивляет своей простотой. В принципе из основных компонентов, в мото
Принципы робототехники — веб-сайт EPSRC
Регулирующие роботы в реальном мире
В сентябре 2010 года эксперты из мира технологий, промышленности, искусства, права и социальных наук встретились на совместном семинаре EPSRC и AHRC Robotics Retreat, чтобы обсудить робототехнику, ее приложения в реальном мире и огромные перспективы, которые она предлагает для приносить пользу обществу.
Роботы покинули исследовательскую лабораторию и теперь используются по всему миру, дома и в промышленности. Мы ожидаем, что в краткосрочной, среднесрочной и долгосрочной перспективе роботы повлияют на нашу жизнь дома, наш опыт работы в учреждениях, нашу национальную и глобальную экономику и, возможно, нашу глобальную безопасность.
Тем не менее, реальность робототехники все еще относительно мало известна общественности, где преобладают научная фантастика и изображения роботов в СМИ. Одна из целей встречи заключалась в том, чтобы изучить, какие шаги следует предпринять, чтобы гарантировать, что исследования робототехники будут привлекать общественность, чтобы эта технология была интегрирована в наше общество с максимальной выгодой для всех его граждан. Как и в случае со всеми технологическими инновациями, мы должны стремиться к тому, чтобы роботы вводились с самого начала таким образом, чтобы это могло вызвать общественное доверие и уверенность; максимизировать выгоды для общества и коммерции; и проактивно предотвращать любые возможные непредвиденные последствия.
Учитывая их известность, невозможно рассматривать управление робототехникой, не принимая во внимание три знаменитых закона робототехники Азимова. (Законы Азимова гласят, что роботу не разрешается делать что-либо, что могло бы повредить человеку; что робот всегда должен подчиняться человеку; и что робот должен защищаться, если это не противоречит первым двум правилам.)
Хотя они представляют собой полезную отправную точку для обсуждения, правила Азимова — вымышленные устройства.Они не были написаны для использования в реальной жизни, и это было бы непрактично, не в последнюю очередь потому, что они просто не работают на практике. (Например, как робот может знать все возможные способы причинения вреда человеку? Как робот может понимать и подчиняться всем человеческим приказам, когда даже люди не понимают, что означают инструкции?)
Истории
Азимова также показали, что даже в мире интеллектуальных роботов всегда можно обойти его законы и найти лазейки. Но, наконец, что наиболее важно, законы Азимова неуместны, потому что они пытаются настаивать на том, чтобы роботы вели себя определенным образом, как если бы они были людьми, когда в реальной жизни именно люди проектируют и используют роботов, которые должны быть фактическими субъектами. любого закона.
Когда мы рассматриваем этические последствия наличия роботов в нашем обществе, становится очевидным, что ответственность за самих роботов не лежит. Роботы — это просто инструменты разного рода, хотя и очень особенные, и ответственность за их хорошее поведение всегда лежит на людях.
Соответственно, правила для настоящих роботов в реальной жизни должны быть преобразованы в правила, информирующие тех, кто проектирует, продает и использует роботов, о том, как им следует действовать. Делегаты собрания разработали такой набор «правил» с целью спровоцировать более широкое и открытое обсуждение вопросов.Они подчеркивают общие принципы, вызывающие озабоченность, выраженные Группой, с намерением сообщить разработчикам и пользователям роботов в конкретных ситуациях. Эти новые правила для робототехники (не роботов) изложены ниже.
Пять этических правил для робототехники задуманы как живой документ. Они не предназначены для использования в качестве жестких законов, а скорее для информационного обеспечения дебатов и для использования в будущем. Очевидно, что эти вопросы были тщательно продуманы, и этот документ не стремится подорвать какую-либо из этих работ, но служит координационным центром для полезного обсуждения.
Делегаты семинара:
Профессор Маргарет Боден, Университет Сассекса
Д-р Джоанна Брайсон, Батский университет
Профессор Дарвин Колдуэлл, Итальянский технологический институт
Профессор Керстин Даутенхан, Университет Хартфордшира
Профессор Лилиан Эдвардс, Стратклайдский университет
Д-р Сара Кембер, ювелиры Лондонского университета
Д-р Пол Ньюман, Оксфордский университет
Джефф Пегман, RU Robots Ltd
Профессор Том Родден, Ноттингемский университет
Профессор Том Сорелл, Бирмингемский университет
Профессор Мик Уоллис, Университет Лидса
Д-р Блей Уитби, Университет Сассекса
Профессор Алан Уинфилд, UWE Bristol
Вивьен Парри (стул)
Принципы для проектировщиков, строителей и пользователей роботов
Примечание: Правила представлены в полулегальной версии; более свободная, но более простая для выражения версия, которая отражает смысл для неспециализированной аудитории и содержит комментарии по решаемым вопросам и почему это правило важно.
Юридический
общая аудитория
Комментарий
1
Роботы — это универсальные инструменты. Роботы не должны разрабатываться исключительно или в первую очередь для того, чтобы убивать или причинять вред людям, кроме как в интересах национальной безопасности.
Роботы не должны проектироваться как оружие, за исключением соображений национальной безопасности.
Инструменты можно использовать более чем один раз. Мы позволяем разрабатывать оружие, которое фермеры используют для уничтожения вредителей и паразитов, но убивать с его помощью людей (вне войны) явно неправильно.Ножами можно намазать маслом или нанести удар людям. В большинстве обществ ни оружие, ни ножи не запрещены, но при необходимости могут быть введены меры контроля (например, законы об оружии) для обеспечения общественной безопасности. Роботы также имеют множество применений. Хотя творческий конечный пользователь, вероятно, мог бы использовать любого робота для насильственных целей, как и с тупым орудием, мы говорим, что роботы никогда не должны быть разработаны исключительно или даже в основном для использования в качестве оружия со смертельным или другим наступательным потенциалом. Этот закон, в случае его принятия, ограничит коммерческие возможности роботов, но мы рассматриваем его как важный принцип для признания их безопасными в гражданском обществе.
2
Ответственные агенты — это люди, а не роботы. Роботы должны быть сконструированы; используется, насколько это практически возможно, в соответствии с существующими законами и основными правами и свободами, включая конфиденциальность.
Роботы должны разрабатываться и эксплуатироваться в соответствии с действующим законодательством, в том числе в отношении конфиденциальности.
Мы, , можем, , убедиться, что действия роботов соответствуют законам , которые установили люди.
Здесь есть два важных момента.Во-первых, конечно, никто не собирается специально создавать робота, нарушающего закон. Но дизайнеры не юристы, и им нужно напоминать, что создание роботов, которые максимально хорошо выполняют свои задачи, иногда нужно будет уравновешивать с защитными законами и общепринятыми стандартами прав человека. Конфиденциальность — это особенно сложный вопрос, поэтому он упоминается. Например, робот, используемый для ухода за уязвимым человеком, вполне может быть полезен для сбора информации об этом человеке 24/7 и передачи ее в больницы для медицинских целей.Но выгода от этого должна быть сбалансирована с правом этого человека на неприкосновенность частной жизни и контроль своей собственной жизни, например отказ от лечения. Собранные данные должны храниться только в течение ограниченного времени; опять же, закон устанавливает определенные гарантии. Разработчики роботов должны подумать о том, как можно соблюдать подобные законы в процессе проектирования (например, путем предоставления выключателей).
Во-вторых, этот закон разработан, чтобы прояснить, что роботы — это просто инструменты, предназначенные для достижения целей и желаний, которые определяют людей .Пользователи и владельцы несут ответственность, а также дизайнеры и производители. Иногда дизайнеры должны думать наперед, потому что роботы могут иметь способность учиться и адаптировать свое поведение. Но пользователи также могут заставлять роботов делать то, чего не предвидели их дизайнеры. Иногда работа владельца — контролировать пользователя (например, если родитель купил робота, чтобы играть с ребенком). Но если окажется, что действия робота нарушают закон, ответственность, юридическая и моральная, всегда будет лежать на одном или нескольких людях, а не на роботе (мы рассматриваем, как узнать, кто несет ответственность в соответствии с законом 5, ниже ).
3
Роботы — это продукты. Они должны разрабатываться с использованием процессов, обеспечивающих их безопасность.
Роботы — это продукты: как и другие продукты, они должны быть безопасными и надежными.
Роботы — это не люди. Это технологии, которые их владельцы, безусловно, могут захотеть защитить (точно так же, как у нас есть сигнализация для наших домов и автомобилей, и охранники для наших заводов), но мы всегда будем ценить безопасность человека выше безопасности машин.Нашей основной целью здесь было убедиться, что безопасность роботов в обществе будет гарантирована, чтобы люди могли доверять им и доверять им.
Это не новая проблема в технологии. У нас уже есть правила и процессы, которые гарантируют, например, покупка и использование бытовой техники и детских игрушек безопасны. Для этого существуют хорошо проработанные существующие режимы безопасности потребителей: промышленные воздушные знаки, британские и международные стандарты, методики тестирования программного обеспечения для выявления ошибок и т. д.Мы также знаем, что общественность знает, что программное обеспечение и компьютеры могут быть «взломаны» посторонними, и также необходимо разработать процессы, показывающие, что роботы максимально защищены от таких атак. Мы считаем, что такие правила, стандарты и тесты должны быть публично приняты или разработаны для индустрии робототехники как можно скорее, чтобы убедить общественность в том, что были приняты все меры безопасности до того, как робот будет выпущен на рынок. Такой процесс также прояснит для промышленности, что именно они должны делать.
Это все еще оставляет дискуссию о том, в какой степени тем, кто владеет или эксплуатирует роботов, следует разрешить защищать их, например, от воровство или вандализм, например, с помощью электрошока. Группа решила удалить фразу, которая давала производителям или владельцам право включать в роботов возможность «самообороны». Другими словами, мы не думаем, что робот должен когда-либо быть «вооружен», чтобы защитить себя. На самом деле это выходит за рамки существующего закона, где общий вопрос будет заключаться в том, совершил ли владелец устройства преступное деяние, такое как нападение, без уважительной причины.
4
Роботы — это произведенные артефакты. Они не должны вводиться в заблуждение с целью эксплуатации уязвимых пользователей; вместо этого их машинная природа должна быть прозрачной.
Роботы — это искусственные артефакты: иллюзию эмоций и намерений нельзя использовать для эксплуатации уязвимых пользователей.
Одно из самых больших обещаний робототехники заключается в том, что игрушки-роботы могут доставлять удовольствие, комфорт и даже форму общения людям, которые не могут заботиться о домашних животных из-за правил их дома, физических возможностей, времени или денег.Однако, как только пользователь привяжется к такой игрушке, производители могут заявить, что у робота есть потребности или желания, которые могут несправедливо стоить владельцам или их семьям больше денег. Юридическая версия этого правила была разработана, чтобы сказать, что, хотя для робота допустимо, а иногда и желательно, чтобы он иногда производил впечатление настоящего интеллекта, любой, кто владеет роботом или взаимодействует с ним, должен иметь возможность узнать, что это такое на самом деле и возможно, для чего он действительно был создан.Робот-интеллект является искусственным, и мы думали, что лучший способ защитить потребителей — это напомнить им об этом, гарантируя им способ «приподнять занавес» (используя метафору из «Волшебника страны Оз»).
Это был самый трудный для четкого выражения закон, и мы потратили много времени на обсуждение использованной формулировки. Чтобы добиться этого на практике, нужно еще подумать. Должны ли все роботы иметь видимые штрих-коды или что-то подобное? Должен ли пользователь или владелец (например, родитель, который покупает робота для ребенка) всегда иметь возможность искать в базе данных или регистрироваться, где указаны функции робота? См. Также правило 5 ниже.
5
Следует указать лицо, несущее юридическую ответственность за робота.
Должна быть возможность выяснить, кто отвечает за любого робота.
В этом правиле мы пытаемся предоставить практическую основу для того, от чего уже неявно зависят все вышеперечисленные правила: робот никогда ни за что не несет юридической ответственности. Это инструмент. Если он выйдет из строя и нанесет ущерб, виноват человек. Однако выяснить, кто является ответственным лицом, может быть непросто.В Великобритании реестр ответственных за автомобиль («зарегистрированный хранитель») ведется DVLA; напротив, никому не нужно регистрироваться в качестве официального владельца собаки или кошки. Мы чувствовали, что первая модель больше подходит для роботов, поскольку будет интерес не только в том, чтобы остановить робота, действия которого причиняют вред, но и пострадавшие люди могут также пожелать получить финансовую компенсацию от ответственного лица.
Ответственность может быть решена несколькими способами. Например, одним из способов продвижения вперед может быть лицензия и регистрация (как в случае с автомобилями), в которой указывается, кто несет ответственность за любого робота.Это может относиться ко всем или работать только там, где это право собственности неочевидно (например, для робота, который может перемещаться вне дома или работать в государственном учреждении, таком как школа или больница). В качестве альтернативы, каждый робот может быть выпущен с доступной для поиска онлайн-лицензией, в которой записывается имя разработчика / производителя и ответственного человека, который его приобрел (такая лицензия также может указывать детали, о которых мы говорили в правиле 4 выше). Очевидно, что требуются дополнительные обсуждения и консультации.
Важно, чтобы юридическая ответственность по-прежнему могла быть разделена или передана. E.г. и разработчик, и пользователь могут иметь общую ошибку, когда робот выходит из строя во время использования из-за сочетания конструктивных проблем и модификаций пользователя. В таких обстоятельствах уже существуют правовые нормы для распределения ответственности (хотя мы, возможно, пожелаем уточнить их или потребовать страхование). Но регистр всегда давал возможность пострадавшему человеку начать с выяснения того, кто, исходя из основных принципов, несет ответственность за рассматриваемого робота.
Семь сообщений высокого уровня
В дополнение к вышеупомянутым принципам группа также разработала всеобъемлющий набор сообщений, направленных на поощрение ответственности в исследовательском и промышленном сообществе робототехники и, таким образом, на завоевание доверия к своей работе.Дух ответственных инноваций по большей части уже присутствует, но мы сочли целесообразным сделать это явным. Следующий комментарий объясняет принципы.
Принцип
Комментарий
1
Мы считаем, что роботы могут оказать огромное положительное влияние на общество. Мы хотим поощрять ответственные исследования роботов.
2
Плохая практика вредит всем нам.
Легко упустить из виду работу людей, которые кажутся решительно настроенными быть экстремистами или безответственными, но, делая это, мы легко можем поставить нас в положение, в котором сейчас находятся ученые GM, когда ничто из того, что они говорят в прессе, не имеет никаких последствий. Нам необходимо взаимодействовать с общественностью и брать на себя ответственность за наш общественный имидж.
3
Решение очевидных общественных проблем поможет нам всем добиться прогресса.
Предыдущее примечание относится также к проблемам, высказанным широкой публикой и писателями-фантастами, а не только нашими коллегами.
4
Важно продемонстрировать, что мы, как робототехники, придерживаемся наилучших стандартов практики.
как указано выше
5
Чтобы понять контекст и последствия нашего исследования, мы должны работать с экспертами из других дисциплин, включая: социальные науки, право, философию и искусство.
Мы должны понимать, как другие воспринимают нашу работу, каковы могут быть правовые и социальные последствия нашей работы.Мы должны выяснить, как лучше всего интегрировать наших роботов в социальные, правовые и культурные рамки нашего общества. Нам нужно выяснить, как вести разговор о реальных возможностях нашего исследования с людьми из разных культур, которые будут смотреть на нашу работу, имея за собой широкий спектр предположений, мифов и повествований.
6
Мы должны учитывать этику прозрачности: есть ли пределы тому, что должно быть открыто?
Этот момент был проиллюстрирован интересным обсуждением программного обеспечения с открытым исходным кодом и операционных систем в контексте, когда системы, которые могут использовать это программное обеспечение, обладают дополнительными возможностями, которыми обладают роботы.Что вы получите, когда дадите роботов «скрипт-детишкам»? Мы все очень поддерживали движение за открытый исходный код, но мы думаем, что нам нужна помощь в размышлениях об этой конкретной проблеме и более широких проблемах, связанных с открытой наукой в целом.
7
Когда мы видим ошибочные сообщения в прессе, мы обязуемся найти время, чтобы связаться с журналистами.
Многие люди разочаровываются, когда видят в прессе возмутительные заявления. Но на самом деле научные репортеры не хотят, чтобы их выставляли дураками, и в целом такие утверждения могут быть исправлены, а источники дискредитированы тихим и простым словом репортерам в подписи автора.Подобная кампания уже однажды успешно проводилась в конце 1990-х годов.
Принцип работы, типы и применения
В электрических системах, которые мы используем в промышленности, на электростанциях или в быту, двигатели и генераторы стали обычным явлением. В связи со спросом на высокоэффективные и менее энергопотребляющие системы наблюдается изобретение новых моделей этих электрических устройств. Основным расчетным фактором для надежной работы двигателей и генераторов является коэффициент мощности .Это отношение приложенной мощности к требуемой мощности. Обычно общее количество электроэнергии, потребляемой предприятиями и предприятиями, рассчитывается на основе коэффициента мощности. Таким образом, коэффициент мощности всегда следует поддерживать равным единице. Но из-за роста реактивной мощности в этих устройствах коэффициент мощности уменьшается. Чтобы поддерживать коэффициент мощности равным единице, вводятся многие методы. Концепция синхронного двигателя — одна из них.
Что такое синхронный двигатель?
Определение синхронного двигателя гласит: «Двигатель переменного тока, в котором в установившемся режиме вращение вала синхронизируется с частотой приложенного тока».Синхронный двигатель работает как двигатель переменного тока, но здесь общее количество оборотов, совершаемых валом, равно целому числу, кратному частоте приложенного тока.
Синхронный двигатель
Синхронный двигатель не использует индукционный ток для работы. В этих двигателях, в отличие от асинхронных, на stato r присутствуют многофазные электромагниты переменного тока, которые создают вращающееся магнитное поле. Здесь ротор представляет собой постоянный магнит, который синхронизируется с вращающимся магнитным полем и вращается синхронно с частотой приложенного к нему тока.
Конструкция синхронного двигателя
Статор и ротор являются основными компонентами синхронного двигателя. Здесь на корпусе статора имеется оберточная пластина, к которой крепятся шпонки и периферийные ребра. Опоры, рамы используются для поддержки машины. Для возбуждения обмоток возбуждения постоянным током используются контактные кольца и щетки.
Цилиндрические и круглые роторы используются для 6 полюсов. Роторы с явными полюсами используются, когда требуется большее количество полюсов. Конструкция синхронного двигателя и синхронного генератора аналогична.
Принцип работы синхронного двигателя
Работа синхронных двигателей зависит от взаимодействия магнитного поля статора с магнитным полем ротора. Статор содержит 3 фазные обмотки и питается от 3 фаз. Таким образом, обмотка статора создает трехфазное вращающееся магнитное поле. На ротор подается постоянный ток.
Ротор входит во вращающееся магнитное поле, создаваемое обмоткой статора, и вращается синхронно. Теперь скорость двигателя зависит от частоты подаваемого тока.
Скорость синхронного двигателя регулируется частотой приложенного тока. Скорость синхронного двигателя может быть вычислена как
Ns = 60f / P = 120f / p
где f = частота переменного тока (Гц) p = общее количество полюсов на фазу P = общее количество пар полюсов на фазу.
Если применяется нагрузка, превышающая пробивную, двигатель десинхронизируется. Трехфазная обмотка статора дает преимущество определения направления вращения.В случае однофазной обмотки невозможно определить направление вращения, и двигатель может запускаться в любом из направлений. Чтобы контролировать направление вращения этих синхронных двигателей, необходимы пусковые устройства.
Способы пуска синхронного двигателя
Момент инерции ротора останавливает крупногабаритные синхронные двигатели от самозапуска. Из-за этой инерции ротора ротор не может синхронизироваться с магнитным полем статора в момент подачи питания.Таким образом, требуется некоторый дополнительный механизм, чтобы помочь ротору синхронизироваться.
В большие двигатели входят индукционные обмотки, которые создают достаточный крутящий момент, необходимый для ускорения. Для очень больших моторов для разгона ненагруженной машины используется пони-мотор. Изменяя частоту тока статора, двигатели с электронным управлением могут разгоняться даже с нулевой скорости.
Для очень маленьких двигателей, когда момент инерции ротора и механическая нагрузка желательно малы, они могут запускаться без каких-либо методов запуска.
Типы синхронных двигателей
В зависимости от метода намагничивания ротора существует два типа синхронных двигателей —
без возбуждения.
Постоянный ток Возбужден.
Двигатель без возбуждения
В этих двигателях ротор намагничен внешним полем статора. Ротор содержит постоянное магнитное поле. Для изготовления ротора используется сталь с высокими удерживающими свойствами, такая как кобальтовая сталь. Они классифицируются как двигатели с постоянным магнитом, реактивные и гистерезисные.
В синхронных двигателях с постоянными магнитами постоянный магнит используется вместе со сталью для конструкции ротора. У них постоянное магнитное поле в роторе, поэтому индукционную обмотку нельзя использовать для запуска. Применяются в качестве безредукторных двигателей лифтов.
Синхронный двигатель с постоянным магнитом
В реактивном двигателе ротор выполнен из стального литья с выступающими полюсами. Чтобы свести к минимуму пульсации крутящего момента, полюса ротора меньше полюсов статора. Содержит обмотку с короткозамкнутым ротором для обеспечения пускового момента ротора.Используется в измерительных приборах.
Двигатели с гистерезисом — это самозапускающиеся двигатели. Здесь ротор представляет собой гладкий цилиндр, изготовленный из магнитотвердой кобальтовой стали с высокой коэрцитивной силой. Эти двигатели дороги и используются там, где требуется точная постоянная скорость. Обычно используются как серводвигатели.
Двигатель с возбуждением постоянным током
Здесь ротор возбуждается постоянным током, подаваемым непосредственно через контактные кольца. Также используются индукция переменного тока и выпрямители. Обычно они имеют большие размеры, например, более 1 лошадиных сил и т. Д.
Двигатель с возбуждением от постоянного тока
Применения синхронных двигателей
Обычно синхронные двигатели используются в приложениях, где требуется точная и постоянная скорость. Эти двигатели с низким энергопотреблением включают в себя позиционирующие машины. Они также применяются в приводах роботов. В шаровых мельницах, часах, проигрывателях пластинок также используются синхронные двигатели. Кроме того, эти двигатели также используются в качестве серводвигателей и синхронизаторов.
Эти двигатели доступны в диапазоне от дробных подковообразных до мощных промышленных размеров.Хотя эти двигатели используются в промышленных масштабах большой мощности, они выполняют две важные функции. Один из них является эффективным средством преобразования энергии переменного тока в механическую энергию, а другой — коррекцией коэффициента мощности. С каким применением серводвигателя вы сталкивались?
Ваш первый робот: Введение в операционную систему роботов [2/5]
, автор — Кайл Фаззари, 21 января 2018 г.
Это вторая публикация в блоге из этой серии о создании вашего первого робота с ROS и Ubuntu Core.В предыдущем посте мы рассмотрели все оборудование, необходимое для работы с этой серией, и представили Ubuntu Core, операционную систему для устройств IoT. Мы установили его на Raspberry Pi и использовали его для просмотра рабочих листов CamJam. В этом посте я познакомлю вас с операционной системой роботов (ROS), и мы будем использовать ее для перемещения нашего робота. В оставшейся части серии мы будем использовать ROS. Помните, что это тоже сериал видео, не стесняйтесь смотреть видеоверсию этого поста:
Что такое операционная система робота?
Проще говоря, ROS — это набор библиотек и инструментов с открытым исходным кодом, предназначенных для упрощения разработки роботов.Он также предоставляет инфраструктуру для соединения различных компонентов робота. Например, если вам довелось просмотреть все рабочие листы CamJam (особенно №9), вы написали единственный скрипт Python, который отвечает за множество вещей: управление двигателями, считывание с линейного детектора, считывание с ультразвукового датчик и т. д. Что, если мы добавим беспроводной контроллер? Этот сценарий быстро усложняется, и если вы захотите поменять один компонент на другой, вам придется переписать все; я.е. эти логически разные компоненты тесно связаны между собой, поскольку находятся в одном скрипте.
ROS предоставляет коммуникационную инфраструктуру, которая позволяет вам извлекать различную логику в их собственные модули и заставлять их взаимодействовать друг с другом стандартным способом, как показано на рисунке выше. Например, если вы хотите переключить ультразвуковые датчики и переписать «дистанционный» модуль, вы можете сделать это, не касаясь каких-либо других модулей, при условии, что новый дистанционный модуль говорил так же, как старый.
Все это станет более понятным, когда мы погрузимся в дело, так что давайте начнем, ладно?
Шаг 1. Установите ROS на Raspberry Pi
.
На момент написания этой статьи ROS имеет три поддерживаемых в настоящее время версии: Indigo Igloo, Kinetic Kame и Lunar Loggerhead. Ubuntu Core серии 16 (которую мы используем) — это Ubuntu Xenial, которая ограничивает наши возможности кинетической и лунной. Lunar технически новее и ярче, но, как и Ubuntu, ROS имеет выпуски долгосрочной поддержки (LTS), которые поддерживаются в течение длительного периода времени, а Kinetic — их самый последний LTS.Поэтому здесь мы будем использовать кинетику.
SSH в свой Pi и войдите в свою классическую оболочку:
$ sudo classic
Давайте следовать руководству по установке ROS Kinetic. ROS поддерживает собственный репозиторий пакетов Debian, который нам нужно добавить в нашу систему:
Затем нам нужно добавить ключи этого репозитория в список ключей, которые мы будем принимать (это подтверждает, что пакеты в этом репозитории действительно поступают из ROS):
Теперь мы повторно проиндексируем все настроенные нами репозитории, поскольку мы только что добавили один:
$ sudo apt update
Теперь установим ROS. Как вы увидите в руководстве по установке, доступно множество метапакетов (пакеты, которые существуют исключительно для втягивания других пакетов). Давайте установим самый маленький, простой, ros-kinetic-ros-base , который займет около 700 МБ. Мы также установим g ++, компилятор C ++ (он все еще необходим, хотя мы пишем Python):
$ sudo apt install g ++ ros-kinetic-ros-base
На этом этапе ROS успешно установлена, но ни один из ее инструментов недоступен для запуска.Это потому, что ROS устанавливает себя в то, что она называет «рабочей областью», и предоставляет сценарий оболочки, который активирует это рабочее пространство. Мы можем убедиться, что активировали это рабочее пространство при входе в систему, добавив его в файл .bashrc в нашем домашнем каталоге:
$ roscore
<снип>
РЕЗЮМЕ
========
ПАРАМЕТРЫ
* / rosdistro: кинетический
* / rosversion: 1.12.12
УЗЛЫ
автоматический запуск нового мастера
процесс [master]: запущен с pid [4987]
ROS_MASTER_URI = http: //localhost.localdomain: 11311 /
установка / run_id на 1db9f4c6-e044-11e7-9931-b827eba43643
процесс [rosout-1]: запущен с pid [5000]
запущена основная служба [/ rosout]
Продолжайте и выйдите из этого, нажав CTRL + C.
Шаг 2. Познакомьтесь с ROS
Одна из причин, по которой мне так нравится ROS (и, я думаю, одна из причин, почему она так популярна), — это фантастическая вводная документация.У них есть феноменальный набор руководств, которые помогут вам от абсолютно ничего не знать до более или менее комфортного состояния всей системы. Каждый из них легко усваивается за несколько минут. Поскольку они настолько хороши, вместо того, чтобы пытаться дублировать их тяжелую работу здесь, вам следует просто начать с самого начала и пройти их, по крайней мере, до тех пор, пока не завершите # 13, «Изучение простого издателя и подписчика» . Обратите внимание, что существует два параллельных учебных курса: один использует C ++, а другой — Python.В этой серии статей мы будем использовать Python, поэтому вам не нужно беспокоиться о C ++, если они вас не интересуют.
Шаг 3: Настройка Python 2
Теперь, когда мы немного познакомились с ROS, пришло время заставить нашего робота двигаться с ее помощью. Однако сначала нам нужно кое-что сделать. Вернувшись к рабочему листу CamJam №1, они упоминают следующее:
«Когда Raspberry Pi был впервые выпущен, некоторые важные библиотеки Python были доступны только для Python 2.7. Однако почти все библиотеки и все те, которые используются в этих таблицах, доступны для Python 3.2. Было решено, что весь код для этого EduKit будет разработан для Python 3.2 ».
~ Рабочий лист CamJam № 1
Это все прекрасно, и я согласен с этим, но, к сожалению, привязки Python для ROS официально поддерживаются только на Python 2, поэтому с этого момента нам нужно использовать Python 2 вместо Python 3. Не волнуйтесь, все код из рабочих листов должен по-прежнему работать, но это означает, что нам нужно установить версию RPi для Python 2.GPIO (сейчас у нас только версия Python 3):
$ sudo apt установить python-dev python-pip python-setuptools
$ pip установить RPi.GPIO
Шаг 4: Создайте пакет ROS для нашего робота
Хорошо, повеселимся! Мы собираемся переписать код, который мы написали для CamJam Worksheet # 7, используя ROS. Мы добавим к нему некоторую обработку сообщений, чтобы с помощью ROS мы могли приказать роботу двигаться вперед, повернуть налево, повернуть направо и т. Д.
Первый шаг — создать новое рабочее пространство.Вы узнали, как это сделать, в первом руководстве по ROS. Я называю свой «edukit_bot_ws», если вы называете свой как-то еще, не забудьте изменить направление соответственно:
Теперь давайте создадим новый пакет в этой рабочей области. Я назову свой «edukit_bot», и он имеет три зависимости: rospy (привязки Python для ROS), std_msgs (стандартные сообщения ROS, например числа, строки и т. Д.)) и python-rpi.gpio (RPi.GPIO, который мы используем для доступа к GPIO):
В рабочих таблицах CamJam это не обсуждается, но если мы сделаем скрипт исполняемым, мы сможем запустить его напрямую, а не вызывать его как python path / to / script.py . Давай сделаем это:
$ chmod a + x ~ / edukit_bot_ws / src / edukit_bot / src / driver_node
Откройте этот скрипт в текстовом редакторе и сделайте его похожим на это (обратите внимание, что весь пакет, используемый в этом посте, доступен для справки):
#! / Usr / bin / env python
импортный rospy
from std_msgs.msg import String
импортировать RPi.GPIO как GPIO
# Установить режимы GPIO
GPIO.setmode (GPIO.BCM)
GPIO.setwarnings (Ложь)
# Установить переменные для контактов мотора GPIO
pinMotorAForwards = 10
pinMotorABackwards = 9
pinMotorBForwards = 8
pinMotorBBackwards = 7
# Сколько раз включать и выключать штифт каждую секунду
Частота = 20
# Как долго штифт остается в каждом цикле, в процентах (здесь 30%)
DutyCycle = 30
# Установка рабочего цикла на 0 означает, что двигатели не будут вращаться.
Стоп = 0
# Установите режим вывода GPIO на вывод
GPIO.настройка (pinMotorAForwards, GPIO.OUT)
GPIO.setup (pinMotorABackwards, GPIO.OUT)
GPIO.setup (pinMotorBForwards, GPIO.OUT)
GPIO.setup (pinMotorBBackwards, GPIO.OUT)
# Установите GPIO на программную ШИМ на 'Frequency' Hertz
pwmMotorAForwards = GPIO.PWM (pinMotorAForwards, Частота)
pwmMotorABackwards = GPIO.PWM (pinMotorABackwards, Частота)
pwmMotorBForwards = GPIO.PWM (pinMotorBForwards, Частота)
pwmMotorBBackwards = GPIO.PWM (pinMotorBBackwards, Частота)
# Запустите программный ШИМ с рабочим циклом 0 (т.е.е. не двигается)
pwmMotorAForwards.start (Стоп)
pwmMotorABackwards.start (Стоп)
pwmMotorBForwards.start (Стоп)
pwmMotorBBackwards.start (Стоп)
# Выключите все моторы
def StopMotors ():
pwmMotorAForwards.ChangeDutyCycle (Стоп)
pwmMotorABackwards.ChangeDutyCycle (Стоп)
pwmMotorBForwards.ChangeDutyCycle (Стоп)
pwmMotorBBackwards.ChangeDutyCycle (Стоп)
# Поверните оба мотора вперед.
def Forwards ():
pwmMotorAForwards.ChangeDutyCycle (DutyCycle)
pwmMotorABackwards.ChangeDutyCycle (Стоп)
pwmMotorBForwards.ChangeDutyCycle (Дежурный цикл)
pwmMotorBBackwards.ChangeDutyCycle (Стоп)
# Поверните оба мотора назад
def Назад ():
pwmMotorAForwards.ChangeDutyCycle (Стоп)
pwmMotorABackwards.ChangeDutyCycle (DutyCycle)
pwmMotorBForwards.ChangeDutyCycle (Стоп)
pwmMotorBBackwards.ChangeDutyCycle (DutyCycle)
# Поверните налево
def Left ():
pwmMotorAForwards.ChangeDutyCycle (Стоп)
pwmMotorABackwards.ChangeDutyCycle (DutyCycle)
pwmMotorBForwards.ChangeDutyCycle (DutyCycle)
pwmMotorBBackwards.ChangeDutyCycle (Стоп)
# Поверни направо
def Right ():
pwmMotorAForwards.ChangeDutyCycle (Дежурный цикл)
pwmMotorABackwards.ChangeDutyCycle (Стоп)
pwmMotorBForwards.ChangeDutyCycle (Стоп)
pwmMotorBBackwards.ChangeDutyCycle (DutyCycle)
# Обработчик сообщений
def CommandCallback (commandMessage):
команда = commandMessage.data
если команда == 'вперед':
print ('Движение вперед')
Нападающие ()
Команда elif == 'назад':
print ('Движение назад')
Назад ()
Команда elif == 'left':
print ('Поворачивая налево')
Слева()
команда elif == 'right':
print ('Поворачивая направо')
Правильно()
Команда elif == 'стоп':
print ('Остановка')
StopMotors ()
еще:
print ('Неизвестная команда, вместо этого остановка')
StopMotors ()
rospy.init_node ('драйвер')
rospy.Subscriber ('команда', String, CommandCallback)
rospy.spin ()
print ('Выключение: остановка моторов')
StopMotors ()
GPIO.cleanup ()
Многие из них должны показаться знакомыми, но давайте разберем их на части.
#! / Usr / bin / env python
импортный rospy
from std_msgs.msg import String
Самая первая строка этого файла называется shebang. Поскольку мы отметили этот файл как исполняемый сам по себе, это определяет интерпретатор, который будет выполнять эту программу.В данном случае мы говорим ему, что ему нужна команда python .
Затем мы импортируем rospy , который включает привязки ROS Python, и импортируем сообщение String из ROS std_msgs . Мы будем использовать оба из них немного позже в программе.
импортировать RPi.GPIO как GPIO
# Установить режимы GPIO
GPIO.setmode (GPIO.BCM)
GPIO.setwarnings (Ложь)
#
# Поверни направо
def Right ():
pwmMotorAForwards.ChangeDutyCycle (Дежурный цикл)
pwmMotorABackwards.ChangeDutyCycle (Стоп)
pwmMotorBForwards.ChangeDutyCycle (Стоп)
pwmMotorBBackwards.ChangeDutyCycle (DutyCycle)
Весь этот раздел был практически дословно взят из рабочего листа CamJam №7. Там это объяснено, поэтому я не буду повторять здесь объяснение.
# Обработчик сообщений
def CommandCallback (commandMessage):
команда = commandMessage.data
если команда == 'вперед':
print ('Движение вперед')
Нападающие ()
Команда elif == 'назад':
print ('Движение назад')
Назад ()
Команда elif == 'left':
print ('Поворачивая налево')
Слева()
команда elif == 'right':
print ('Поворачивая направо')
Правильно()
Команда elif == 'стоп':
print ('Остановка')
StopMotors ()
еще:
print ('Неизвестная команда, вместо этого остановка')
StopMotors ()
Вот новая часть, относящаяся к ROS.Функция CommandCallback создана для обработки сообщения String . Он просто просматривает данные (т.е. саму строку), содержащиеся в сообщении, и предпринимает соответствующие действия. Например, если строка представляет собой слово «вперед», он перемещает робота вперед, вызывая функцию Вперед , созданную на листе. Точно так же, если слово «влево», робот поворачивает влево, вызывая функцию Left . Если команда не является одним из распознанных слов, функция делает самое безопасное, что может: останавливается.
Вот основная часть программы. Прежде всего, мы инициализируем узел и даем ему имя («драйвер»). Это начинает связь с мастером ROS. Затем мы подписываемся на тему с именем «команда» и указываем, что ожидаем, что эта тема будет сообщением String . Затем мы предоставляем нашу функцию CommandCallback , чтобы запросить ее вызов при поступлении новых сообщений по этой теме.
Затем мы вызываем rospy.spin () , который блокирует и ожидает поступления сообщений. После того, как узел попросит выйти (скажем, с помощью CTRL + C), эта функция завершится, и в этот момент мы гарантируем, что двигатели остановлены. Мы не хотим, чтобы робот убегал от нас!
Мы закончили с нашим рабочим пространством, поэтому давайте создадим его:
$ cd ~ / edukit_bot_ws
$ catkin_make
Шаг 6. Переместите робота с помощью ROS
.
На этом этапе у нас есть узел ROS, который будет управлять нашим роботом в соответствии с запросом в «командном» сообщении.Однако он использует GPIO, для чего по-прежнему требуется sudo . Вместо того, чтобы пытаться заставить нашу рабочую область работать с помощью sudo , давайте временно изменим разрешения GPIO, чтобы нам не требовалось sudo (это будет сброшено после перезагрузки):
$ sudo chmod a + rw / dev / gpiomem
/ dev / gpiomem — это устройство, представляющее память, выделенную для GPIO (то есть не другую, более важную / опасную память). В результате эта операция относительно безопасна, особенно по сравнению с тем же, что и для e.г. / dev / mem .
Хорошо, давайте проверим! Для этого вам нужно открыть три терминала, каждый из которых использует классическую оболочку (помните, запустите sudo classic , чтобы войти в классическую оболочку). Сначала нам понадобится мастер ROS, так как без него издатели и подписчики не могут найти друг друга. Итак, в одном терминале запускаем мастер ROS:
$ roscore
В другом терминале убедитесь, что вы активировали нашу недавно созданную рабочую область и запустите наш узел «драйвер»:
Наконец, в третьем терминале мы начнем давать команды, чтобы робот двигался. Прежде всего, обратите внимание на темы, у которых есть издатели или подписчики:
$ ростопический список
/ команда
/ rosout
/ rosout_agg
Обратите внимание на тему / command . Это тема, которую слушает наш узел «драйвер» из-за настроенного нами подписчика . Он ожидает сообщения String , поэтому давайте отправим ему команду, скажем, для движения вперед:
$ rostopic pub -1 / command std_msgs / Строка "вперед"
публикация и фиксация сообщения для 3.0 секунд
Вы должны заметить, что узел «водитель» говорит, что он движется вперед, а затем колеса вашего робота должны начать вращаться вперед! Попробуйте отправить любую из строк, которые мы обработали в CommandCallback («влево», «назад» и т. Д.), И команды, которые, как вы знаете, недействительны, чтобы гарантировать безопасную остановку.
Поздравляем, вы быстро изучаете ROS! В следующем посте из этой серии мы освободимся от рабочих листов CamJam и начнем самостоятельно. Мы представим беспроводной контроллер и начнем работать над созданием дистанционного управления нашим роботом с помощью ROS.
Эта статья первоначально появилась в блоге Кайла Фаззари.
Введение в ROS (операционная система роботов)
Операционная система для роботов или просто ROS — это платформа, которая используется сотнями компаний и технических специалистов в различных областях по всему миру в области робототехники и автоматизации. Он обеспечивает безболезненную отправную точку для непрофессионалов в области программирования роботов.
Итак, прежде всего Что такое робот? Робот — это любая система, которая может воспринимать окружающую среду, которая является его окружением, принимать решения на основе состояния окружающей среды и может выполнять сгенерированные инструкции.
ОС и ROS? Операционная система — это программное обеспечение, обеспечивающее интерфейс между приложениями и оборудованием. Он занимается распределением ресурсов, таких как память, время процессора и т. Д., С использованием алгоритмов планирования и ведет учет полномочий различных пользователей, обеспечивая таким образом уровень безопасности. Он почти всегда имеет низкоуровневую программу, называемую ядром , , которая помогает взаимодействовать с оборудованием и является, по сути, наиболее важной частью любой операционной системы.
ROS — это не операционная система, а мета-операционная система, что означает, что она предполагает наличие базовой операционной системы, которая поможет ей в выполнении своих задач.
ROS и соответствующая операционная система —
ROS зависит от базовой операционной системы. ROS требует от операционной системы большой функциональности. Вдобавок к этому ROS должны быть бесплатно доступны для большой части населения, иначе большая часть населения не сможет получить к ней доступ.Популярность ROS во многом обусловлена ее открытым характером и легкой доступностью для массового населения. Ему также нужна операционная система с открытым исходным кодом, поэтому операционная система и ROS могут быть изменены в соответствии с требованиями приложения. Проприетарные операционные системы , такие как Windows 10 и Mac OS X, могут накладывать определенные ограничения на то, как мы можем их использовать. Это может привести к жесткости процесса разработки, что не будет идеальным для такого отраслевого стандарта, как ROS. Следовательно, большинство людей предпочитают запускать ROS в Linux, особенно в Debian и Ubuntu, поскольку ROS очень хорошо поддерживает операционные системы на основе Debian, особенно Ubuntu.Это не означает, что ROS нельзя запускать с Mac OS X или Windows 10, если на то пошло. Но поддержка ограничена, и люди могут оказаться в сложной ситуации без небольшой помощи со стороны сообщества.
Между ROS и ОС существует такая близость, что становится почти необходимым знать больше об операционной системе для работы с ROS. Использование Linux в качестве новичка может быть проблемой. Один из них обязательно столкнется с проблемами с Linux, особенно при работе с ROS, и хорошее знание Linux поможет предотвратить / исправить эти проблемы.
A Мета-операционная система обладает огромным набором функциональных возможностей, настолько большим, что его нельзя классифицировать как платформу или кластер библиотек, но не настолько, чтобы его можно было также отнести к категории операционной системы. Он обеспечивает функциональные возможности как операционных систем, так и фреймворков, но не в полной мере, поэтому его нельзя классифицировать ни как, например, он не предоставляет основные функции, которые должна обеспечивать операционная система, но предоставляет API.
RViz — это инструмент трехмерной визуализации для ROS.Это один из самых популярных инструментов для визуализации. Он принимает тему в качестве входных данных и визуализирует ее в зависимости от типа публикуемого сообщения. Это позволяет нам увидеть окружающую среду с точки зрения робота.
После того, как весь код будет готов и запущен, нам нужно протестировать его, чтобы при необходимости внести изменения. Выполнение этого на реальном роботе будет дорогостоящим и может привести к потере времени на настройку робота каждый раз. Поэтому для этого мы используем роботизированное моделирование.Самый популярный тренажер для работы с ROS — Gazebo . У него хорошая поддержка сообщества, это открытый исходный код, и на нем проще развертывать роботов.
ROS предназначалась для особых случаев использования. С тех пор многое изменилось, мы стали свидетелями возрождения исследований в области искусственного интеллекта и увеличения количества вариантов использования. Робототехника становится все более популярной среди масс, и хотя ROS очень хорошо справляется с этими задачами (хотя и не была создана), она требует большого количества хаков.
Вниманию читателя! Не прекращайте учиться сейчас. Получите все важные концепции теории CS для собеседований SDE с помощью курса CS Theory Course по приемлемой для студентов цене и станьте готовым к работе в отрасли.
Принцип работы турбомолекулярного насоса
4.9.1.1 Принцип действия турбомолекулярного насоса
Насосный эффект устройства, состоящего из ротора и
лопасти статора основаны на передаче импульсов от быстро
вращающиеся лопасти к перекачиваемым молекулам газа.Молекулы, которые
сталкиваются с лезвиями, адсорбируются там и снова оставляют лезвия
через определенный промежуток времени. В этом процессе добавляется скорость лезвия.
к тепловой молекулярной скорости. Для обеспечения того, чтобы составляющая скорости
что передается лопастями, не теряется из-за столкновений с
другие молекулы, в насосе должен преобладать молекулярный поток, т.е. е.
длина свободного пробега должна быть больше, чем расстояние между лопастями
В случае кинетических насосов противодавление возникает, когда
перекачка газа; это вызывает обратный поток.Скорость откачки обозначается
$ S_0 $. Объемный расход уменьшается с увеличением давления и
достигает значения 0 при максимальной степени сжатия $ K_0 $.
Рисунок 4.22: Принцип работы
турбомолекулярный насос
Степень сжатия
Степень сжатия, которую обозначают $ K_0 $, можно оценить
по Геде [25].
Следующее относится к визуально плотной структуре лезвия (рис.
4.22):
Геометрические соотношения взяты из рисунка 4.22. Фактор $ g $ равен
от 1 до 3 [26].
Из уравнения видно, что $ K_0 $ растет экспоненциально.
со скоростью лезвия $ v $, а также с $ \ sqrt {M} $, потому что
$ \ bar {c} = \ sqrt {\ frac {8 \ cdot R \ cdot T} {\ pi \ cdot M}} $ (Формула
1-10)
Следовательно, степень сжатия азота, например,
значительно выше, чем у водорода.
Объемный расход (скорость откачки)
Скорость откачки $ S_0 $ пропорциональна входной площади $ A $ и
средняя окружная скорость лопастей $ v $, i.е.
скорость вращения. С учетом угла лезвия $ \ alpha $ получаем:
$ C_ {Ef} = \ frac {\ bar {c}} {4} \ cdot A $ (Формула 1-24)
, а также оптимальный угол лезвия 45 °, дает
приблизительная эффективная скорость откачки S eff турбонасоса для тяжелых
газы (молекулярная масса> 20) в соответствии со следующими
формула:
Formula 4-10: Эффективная скорость откачки турбонасоса
Деление эффективной скорости откачки на поверхность входа лопасти
самого верхнего диска и взяв область, заблокированную лезвием
толщина учитывается с множителем $ d_f \ приблизительно $ 0.9, дает
удельная скорость откачки турбонасоса, например, для азота (кривая
на рисунке 4.23):
По оси Y на рисунке 4.23 удельная скорость откачки отложена в
л · с -1 · см -2 и среднее лезвие
скорость $ v = \ pi \ cdot f \ cdot (R_a + R_i) $ отложена по оси X.2) \ cdot \ pi $, получает скорость откачки насоса
и позволяет сравнить его с информацией каталога.
Рисунок 4.23: Удельные скорости откачки турбонасоса
Точки на рисунке 4.23 определены Пфайффером.
Вакуум на основе измеренных значений указанных насосов.
Точки намного выше построенной кривой физически невозможны.
Рисунок 4.24: Скорость откачки в зависимости от относительной
молекулярная масса
Рисунок 4.25: Скорость откачки в зависимости от входа
давление
Определенные таким образом скорости откачки еще ничего не говорят о значениях
для легких газов, например для водорода. Если турбонасос предназначен для
низкое предельное давление, используются ступени насоса с различным углом наклона лопастей
и градация оптимизирована для максимальной скорости откачки для
водород. Таким образом получаются насосы с достаточной степенью сжатия для
как водород (примерно 1000), так и азот, что должно быть 10 9 из-за высокого парциального давления азота в воздухе.В этом случае
чистых турбомолекулярных насосы, хлебопекарная-вакуумные давления
примерно 10 -2 мбар требуется из-за их молекулярных
течь.
Рисунок 4.26: Принцип работы столика Holweck
Глоссарий терминов по робототехнике | Определения и примеры робототехники
Термины, определения и примеры робототехники
Функция графического 3D-дисплея Функция трехмерного графического отображения (далее именуемая функцией трехмерного отображения) заключается в том, что трехмерная модель робота отображается в окне подвесного программирования, и может быть подтверждено текущее значение робота.Используя многооконную функцию, позиция обучения задания, отображаемая в содержании задания, также может быть подтверждена в окне 3D-дисплея. Когда функция функциональной безопасности активна, также может отображаться диапазон функциональной безопасности.
Абсолютные данные (данные ABSO) Абсолютные данные (данные ABSO) — это поправочный коэффициент для данных, который устанавливает указанное нулевое значение, когда робот находится в заданном исходном положении (положение калибровки).
Точность Точность — это измерение отклонения между характеристикой команды и достигнутой характеристикой (R15.05-2), или точность, с которой может быть достигнуто вычисленное или вычисленное положение робота. Точность обычно хуже, чем повторяемость руки. Точность не является постоянной по всему рабочему пространству из-за влияния кинематики звена.
Активный совместимый робот Активно совместимый робот — это робот, в котором изменение движения во время выполнения задачи инициируется системой управления. Модификация индуцированного движения незначительна, но достаточна для облегчения выполнения желаемой задачи.
Фактическая позиция Положение или расположение точки управления инструментом. Обратите внимание, что это не будет точно таким же, как позиция запроса, из-за множества невыявленных ошибок, таких как отклонение линии связи, нерегулярность передачи, допуски в длине линии и т. Д.
Привод Силовой механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию, чтобы вызвать движение робота) (R15.07). Привод реагирует на сигнал, полученный от системы управления.
Плечо Взаимосвязанный набор звеньев и механических соединений, включающий робот-манипулятор, который поддерживает и / или перемещает запястье и руку или конечный эффектор в пространстве. Сама рука не имеет рабочего органа. См. Манипулятор, Рабочий орган и Запястье.
Шарнирно-сочлененный манипулятор Манипулятор с рукой, разделенной на секции (звенья) одним или несколькими суставами.Каждое из сочленений представляет собой степень свободы в системе манипулятора и допускает поступательное и вращательное движение.
Шарнирное соединение Описывает сочлененное устройство, например сочлененный манипулятор. Шарниры обеспечивают вращение вокруг вертикальной оси и подъем из горизонтальной плоскости. Это позволяет роботу проникать в замкнутые пространства.
Робот-сборщик Робот, специально разработанный для соединения, подгонки или иным способом сборки различных деталей или компонентов в готовые изделия.В основном используется для захвата деталей и стыковки или подгонки их друг к другу, например, при производстве на конвейере.
Функция автоматического измерения Для оптимального движения робота необходимо указать массовые характеристики рабочего органа. Эти свойства могут быть получены из CAD-модели инструмента. Функция автоматического измерения является альтернативой модели САПР и использует саму руку робота для измерения свойств инструмента. С помощью этой функции пользователь может регистрировать нагрузку на инструмент, положение центра тяжести инструмента и момент инерции в центре тяжести.
Автоматический режим См. Режим воспроизведения.
Ось Направление, используемое для задания движения робота в линейном или вращательном режиме. (ISO 8373)
Взаимодействие осей Область пересечения осей — это функция, которая определяет текущее положение каждой оси и выводит сигнал в зависимости от того, находится ли текущее положение в пределах предварительно определенного диапазона.
База Устойчивая платформа, к которой крепится промышленный робот-манипулятор.
Базовая система координат Базовая система координат (иногда называемая мировой системой координат) определяет общую опорную точку для ячейки или приложения. Это полезно при использовании нескольких роботов или устройств, поскольку позиции, определенные в базовых координатах, будут одинаковыми для всех роботов и устройств. (см. рисунок справа)
Базовая ссылка Стационарная базовая конструкция манипулятора робота, поддерживающая первый сустав.
Приработка Burn-In — это процедура тестирования робота, при которой все компоненты робота работают непрерывно в течение длительного периода времени.Это делается для проверки движения и программирования движения робота на ранних этапах, чтобы избежать сбоев в работе после развертывания.
Система автоматизированного проектирования (CAD) Компьютерное проектирование (САПР). Приложения компьютерной графики, предназначенные для проектирования объектов (или частей), которые должны быть изготовлены. Компьютер используется в качестве инструмента для проектирования схем и создания чертежей, которые позволяют точно производить объект. Система CAD позволяет создавать трехмерные чертежи основных фигур, точно определять размеры и размещение компонентов, строить линии заданной длины, ширины или угла, а также удовлетворять различные геометрические формы.Эта система также позволяет проектировщику испытывать моделируемую деталь при различных напряжениях, нагрузках и т. Д.
Карусель Вращающаяся платформа, которая доставляет объекты роботу и служит системой очереди объектов. Эта карусель доставляет объекты или детали на станцию загрузки / выгрузки робота.
Декартовы координаты Декартовы координаты — это тип системы координат, в которой положение точки в двухмерном пространстве определяется парой числовых чисел, которые дополнительно определяют расстояние до фиксированных осей, перпендикулярных друг другу.Проще говоря, график XY представляет собой двумерную декартову систему координат. Когда точка задана в трехмерном пространстве (график XYZ), она составляет трехмерную декартову систему координат. Положение TCP робота указывается в декартовой системе координат.
Декартов манипулятор Декартов манипулятор — это манипулятор робота с призматическими шарнирами, который позволяет перемещаться по одной или нескольким из трех осей в системе координат X, Y, Z.
Декартова топология Топология, в которой используются призматические соединения, обычно расположенные перпендикулярно друг другу.
Робот в декартовых координатах Робот с декартовыми координатами — это робот, чьи степени свободы манипулятора определяются декартовыми координатами. Здесь описываются движения восток-запад, север-юг и вверх-вниз, а также вращательные движения для изменения ориентации.
Категория 3 (Cat3) Категория 3 (Cat 3) означает, что связанные с безопасностью части системы управления будут спроектированы таким образом, чтобы:
Единичные неисправности не препятствуют правильной работе функции безопасности.
Одиночные неисправности будут обнаружены при следующем запросе функции безопасности или до него.
Когда происходит единичный отказ, безопасное состояние должно поддерживаться до тех пор, пока обнаруженный отказ не будет исправлен.
Обнаружены все разумно предсказуемые неисправности.
Центробежная сила Когда тело вращается вокруг оси, отличной от оси, расположенной в центре его масс, оно оказывает внешнюю радиальную силу, называемую центробежной силой, на ось, которая удерживает его от движения по прямой касательной линии.Чтобы компенсировать эту силу, робот должен приложить противоположный крутящий момент в суставе вращения.
Круглый тип движения Расчетный путь, который выполняет робот, имеет круглую форму.
Зажим Конечный эффектор, который служит пневматической рукой, контролирующей захват и отпускание объекта. Тактильные датчики и датчики силы обратной связи используются для управления силой, приложенной зажимом к объекту. См. «Концевой эффектор».
Зажим Максимально допустимая сила, действующая на область тела в результате столкновения робота, когда период контакта приводит к пластической деформации мягких тканей человека.
Сила зажима При контакте может быть зажат части тела (частей).
Замкнутый Управление осуществляется роботом-манипулятором посредством обратной связи. Когда манипулятор находится в действии, его датчики постоянно передают информацию контроллеру робота, который используется для дальнейшего направления манипулятора в рамках данной задачи. Многие датчики используются для передачи информации о размещении манипулятора, скорости, крутящем моменте, приложенных силах, а также о размещении целевого движущегося объекта и т. Д.См. Отзыв.
Коллаборативный робот Термин, используемый для описания роботизированной системы, предназначенной для работы в одном или нескольких из четырех совместных режимов.
Командный интерпретатор
Модуль или набор модулей, определяющий значение полученной команды. Команда разбивается на части (разбирается) и обрабатывается.
Командная позиция Положение конечной точки движения робота, которого пытается достичь контроллер.
Соответствие Смещение манипулятора в ответ на силу или крутящий момент. Высокая податливость означает, что манипулятор немного перемещается при нагрузке. Это называется пористым или упругим. В стрессовой ситуации низкая комплаентность будет жесткой системой.
Соответствующий робот Робот, который выполняет задачи в отношении внешних сил, изменяя свои движения таким образом, чтобы эти силы минимизировались. Указанное или разрешенное движение достигается за счет поперечного (горизонтального), осевого (вертикального) или вращательного податливости.
Конфигурация Расположение ссылок, созданное определенным набором совместных позиций на роботе. Обратите внимание, что может быть несколько конфигураций, приводящих к одному и тому же положению конечной точки.
Контактный датчик Устройство, которое обнаруживает присутствие объекта или измеряет величину приложенной силы или крутящего момента, приложенного к объекту при физическом контакте с ним. Контактное зондирование можно использовать для определения местоположения, идентичности и ориентации деталей.
Непрерывный путь Описывает процесс, в котором робот контролирует весь пройденный путь, в отличие от метода обхода от точки к точке. Это используется, когда траектория рабочего органа наиболее важна для обеспечения плавного движения, например, при окраске распылением и т. Д. См. «От точки к точке».
Алгоритм управления Монитор, используемый для обнаружения отклонений траектории, в котором датчики обнаруживают такие отклонения, и приложения крутящего момента вычисляются для приводов.
Команда управления Команда, подаваемая роботу с помощью устройства ввода от человека к машине. См. Кулон (Обучение). Эта команда принимается системой контроллера робота и интерпретируется. Затем соответствующая команда подается на исполнительные механизмы робота, которые позволяют ему реагировать на начальную команду. Часто команда должна интерпретироваться с использованием логических единиц и определенных алгоритмов. См. «Устройство ввода и цикл команд».
Устройство управления Любая часть оборудования управления, обеспечивающая средства для вмешательства человека в управление роботом или роботизированной системой, например кнопка аварийного останова, кнопка запуска или селекторный переключатель.(R15.06)
Режим управления Средства, с помощью которых инструкции передаются роботу.
Управляемость Свойство системы, с помощью которого входной сигнал может переводить систему из начального состояния в желаемое состояние по предсказуемому пути в течение заранее определенного периода времени.
Контроллер Устройство обработки информации, входными данными которого являются как желаемое, так и измеренное положение, скорость или другие соответствующие переменные в процессе, а выходными данными являются управляющие сигналы для управляющего двигателя или исполнительного механизма.(R15.02)
Система контроллера Механизм управления роботом обычно представляет собой компьютер определенного типа, который используется для хранения данных (как робота, так и рабочей среды), а также хранения и выполнения программ, управляющих роботом. Система Контроллера содержит программы, данные, алгоритмы; логический анализ и различные другие операции обработки, которые позволяют ему выполнять. См. Робот.
Система координат или рамка Система координат (или рамка) определяет исходное положение и ориентацию, с которой можно измерить положение робота.Все положения робота определены со ссылкой на систему координат. Роботы Yaskawa используют следующие системы координат:
Центральный процессор (ЦП) Центральный процессор (ЦП) — это основная печатная плата и процессор системы контроллера.
Кубическая зона помех Эта область представляет собой прямоугольный параллелепипед, параллельный базовой координате, координате робота или координате пользователя. Контроллер YRC1000 определяет, находится ли текущее положение ЦТП манипулятора внутри или за пределами этой области, и выводит это состояние в качестве сигнала.
Цикл Однократное выполнение полного набора движений и функций, содержащихся в программе робота. (R15.05-2)
Циклическая система координат Система координат, которая определяет положение любой точки с точки зрения углового размера, радиального размера и высоты от базовой плоскости. Эти три измерения определяют точку на цилиндре.
Цикло-привод Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используется на большой (большей) оси.
Цилиндрическая топология Топология, в которой плечо следует радиусом горизонтального круга с призматическим шарниром для подъема или опускания круга. Не пользуется популярностью в промышленности.
Выключатель аварийного отключения Срок истек. См. Включение устройства.
степеней свободы Количество независимых направлений или суставов робота (R15.07), которые позволяют роботу перемещать свой конечный эффектор через требуемую последовательность движений.Для произвольного позиционирования необходимо 6 степеней свободы: 3 для положения (влево-вправо, вперед-назад и вверх-вниз) и 3 для ориентации (рыскание, тангаж и крен).
Прямой привод Совместное срабатывание, в том числе без элементов трансмиссии (т. Е. Тяга привинчена к выходу двигателя).
Время простоя Период времени, в течение которого робот или производственная линия останавливаются из-за неисправности или отказа. См. Время работы.
Привод Редуктор скорости (зубчатый) для преобразования низкого крутящего момента на высокой скорости в высокий крутящий момент на низкой скорости.См. Разделы Harmonic Drive, Cyclo Drive и Rotary Vector Drive).
Прямая доставка Способ подведения предмета к рабочему месту под действием силы тяжести. Обычно желоб или контейнер размещают таким образом, чтобы по окончании работы над деталью она упала или упала в желоб или на конвейер с небольшой транспортировкой робота или без него.
Динамика Изучение движения, сил, вызывающих движение, и сил, обусловленных движением. Динамика манипулятора робота очень сложна, поскольку является результатом кинематического поведения всех масс внутри конструкции руки.Кинематика манипулятора робота сложна сама по себе.
Аварийный останов Работа схемы с использованием аппаратных компонентов, которая перекрывает все другие органы управления роботом, снимает мощность привода с исполнительных механизмов робота и вызывает остановку всех движущихся частей. (R15.06)
Переключатель включения См. Включение устройства.
Разрешающее устройство Устройство с ручным управлением, которое при постоянном включении разрешает движение.Освобождение устройства должно остановить движение робота и связанное с ним оборудование, которое может представлять опасность. (R15.06)
Кодировщик Устройство обратной связи в руке робота-манипулятора, которое предоставляет контроллеру данные о текущем положении (и ориентации руки). Луч света проходит через вращающийся кодовый диск, который содержит точный узор из непрозрачных и прозрачных сегментов на своей поверхности. Свет, который проходит через диск, попадает в фотодетекторы, которые преобразуют световой рисунок в электрические сигналы.См. Раздел «Обратная связь, управление с обратной связью и датчик обратной связи».
EOAT См. Захват или Концевой эффектор.
Рабочий орган Вспомогательное устройство или инструмент, специально предназначенные для крепления к запястью робота или монтажной пластине для инструментов, чтобы робот мог выполнять свою задачу. (Примеры могут включать: захват, пистолет для точечной сварки, пистолет для дуговой сварки, распылительный пистолет или любые другие инструменты.) (R15.06)
Конечная точка Номинальное управляемое положение, которого манипулятор будет пытаться достичь в конце пути движения.Конец дистального звена.
Ошибка Разница между фактическим ответом робота и отданной командой.
Возможность расширения Возможность добавления ресурсов в систему, таких как память, жесткий диск большего размера, новая карта ввода-вывода и т. Д.
Предел внешней силы Пороговое значение, при котором робот перемещается или сохраняет свое положение, даже при приложении внешних сил (при условии, что силы не превышают пределов, которые могут вызвать ошибку).
Обратная связь Возврат информации от манипулятора или датчика к процессору робота для обеспечения самокорректирующегося управления манипулятором. См. Управление обратной связью и Датчик обратной связи.
Управление обратной связью Тип управления системой, получаемый, когда информация от манипулятора или датчика возвращается в контроллер робота для получения желаемого эффекта робота. См. Раздел «Обратная связь, управление с обратной связью и датчик обратной связи».
Датчик обратной связи Механизм, через который информация от сенсорных устройств передается обратно в блок управления роботом. Информация используется в последующем направлении движения робота. См. Управление с обратной связью и управление с обратной связью.
Гибкость Способность робота выполнять самые разные задачи.
Силовая обратная связь Метод обнаружения, использующий электрические сигналы для управления рабочим органом робота во время работы рабочего органа.Информация поступает от датчиков силы рабочего органа к блоку управления роботом во время выполнения конкретной задачи, чтобы обеспечить улучшенную работу рабочего органа. См. Обратная связь, Датчик обратной связи и Датчик силы.
Датчик силы Датчик, способный измерять силы и крутящий момент, прилагаемые роботом и его запястьем. Такие датчики обычно содержат тензодатчики. Датчик предоставляет информацию, необходимую для обратной связи по силе. См. Force Feedback
.
Решение прямой кинематики
Расчет, необходимый для определения положения конечной точки с учетом положений шарниров.Для большинства топологий роботов это проще, чем найти обратное кинематическое решение.
Передняя кинематика Вычислительные процедуры, определяющие, где находится рабочий орган робота в пространстве. В процедурах используются математические алгоритмы вместе с совместными датчиками для определения его местоположения.
Рама Система координат, используемая для определения положения и ориентации объекта в пространстве, а также положения робота в его модели.
Блок функциональной безопасности (FSU) Блок функциональной безопасности (FSU) — это компонент контроллера робота Yaskawa, который обеспечивает программируемые функции безопасности, которые обеспечивают совместную работу робота. Поскольку эти функции безопасности являются программируемыми, FSU позволяет минимизировать площадь, занимаемую расположенным поблизости оборудованием, а также зоны, доступные для человека. FSU состоит из двух параллельных центральных процессоров (ЦП), работающих одновременно, что обеспечивает двухканальную проверку.Кроме того, FSU получает позицию робота от своих энкодеров независимо от системы управления движением робота. Основываясь на этой обратной связи, FSU контролирует положение, скорость и положение манипулятора и инструмента.
Портал Регулируемый подъемный механизм, который перемещается по фиксированной платформе или гусенице, поднятому или на уровне земли по осям X, Y, Z.
Портальный робот Робот с тремя степенями свободы по системе координат X, Y и Z.Обычно состоит из намоточной системы (используемой в качестве крана), которая при намотке или размотке обеспечивает движение вверх и вниз по оси Z. Катушка может скользить слева направо по валу, который обеспечивает движение по оси Z. Катушка и вал могут двигаться вперед и назад по направляющим, которые обеспечивают движение по оси Y. Обычно используется, чтобы расположить концевой эффектор над желаемым объектом и поднять его.
Гравитационная загрузка Сила, действующая вниз, из-за веса манипулятора робота и / или нагрузки на конце руки.Сила создает ошибку в отношении точности положения концевого эффектора. Компенсирующая сила может быть вычислена и применена, чтобы вернуть руку в желаемое положение.
Захват Концевой эффектор, предназначенный для захвата и удержания (ISO 8373), а также для «захвата» или захвата объекта. Он прикреплен к последнему звену руки. Он может удерживать объект, используя несколько различных методов, таких как: приложение давления между своими «пальцами», или может использовать намагничивание или вакуум для удержания объекта и т. Д.См. «Концевой эффектор».
Ручная Зажим или захват, используемый в качестве рабочего органа для захвата предметов. См. Концевой эффектор, Захват.
Ручное управление Совместная функция, которая позволяет оператору вручную направлять робота в желаемое положение. Эта задача может быть достигнута за счет использования дополнительного внешнего оборудования, установленного непосредственно на роботе, или робота, специально разработанного для поддержки этой функции. Оба решения потребуют использования элементов функциональной безопасности.Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Привод гармоник Компактный легкий редуктор, который преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости. Обычно находится на малой (меньшей) оси.
Ремень Обычно несколько проводов, связанных вместе для подачи питания и / или передачи сигналов к / от устройств. Например, двигатели робота подключены к контроллеру через жгут проводов.
Опасное движение Непреднамеренное / неожиданное движение робота, которое может привести к травме.
Удерживать Остановка всех движений робота во время его последовательности, при которой на роботе сохраняется некоторая мощность. Например, выполнение программы останавливается, однако питание серводвигателей остается включенным, если требуется перезапуск.
Исходное положение Известное и фиксированное положение на основной оси координат манипулятора, где он останавливается, или в указанном нулевом положении для каждой оси.Это положение уникально для каждой модели манипулятора. На роботах Motoman® есть индикаторные метки, которые показывают исходное положение для соответствующей оси.
МЭК Международная электротехническая комиссия
Индуктивный датчик Класс датчиков приближения, который имеет половину ферритового сердечника, катушка которого является частью цепи генератора. Когда металлический объект входит в это поле, в какой-то момент объект будет поглощать достаточно энергии из поля, чтобы заставить осциллятор перестать колебаться.Это означает, что объект присутствует в определенной близости. См. Датчик приближения.
Промышленный робот Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специализированных устройств посредством переменных запрограммированных движений для выполнения множества задач (R15.06). Основные компоненты: одна или несколько рук, которые могут двигаться в нескольких направлениях, манипулятор и компьютерный контроллер, который дает подробные инструкции по перемещению.
ИНФОРМАЦИЯ Язык программирования роботов для роботов Yaskawa. Язык ИНФОРМ позволяет пользователю робота: инструктировать робота использовать его основные возможности для выполнения определенного набора ожиданий, а также описывать роботу посредством определения параметров и условий, каковы ожидания в определенных ситуациях или сценариях. Проще говоря, язык программирования INFORM позволяет пользователю указывать роботу, что делать, когда это делать, где это делать и как это делать.
Устройства ввода Разнообразные устройства, позволяющие взаимодействовать между человеком и машиной. Это позволяет человеку программировать, управлять и моделировать робота. К таким устройствам относятся пульт программирования, компьютерные клавиатуры, мышь, джойстики, кнопки, панель оператора, тумба оператора и т. Д.
Инструкция Строка программного кода, вызывающая действие системного контроллера. См. Командное положение.
Цикл команд Время, необходимое для цикла системы контроллера робота для декодирования команды или инструкции перед ее выполнением.Программисты-роботы должны очень внимательно анализировать цикл команд, чтобы обеспечить быструю и правильную реакцию на изменяющиеся команды.
Интегрировать Чтобы объединить разные подсистемы, такие как роботы и другие устройства автоматизации, или, по крайней мере, разные версии подсистем в одной оболочке управления.
Интегратор Компания, предоставляющая услуги с добавленной стоимостью, результатом которых является создание решений по автоматизации путем объединения робота и другого оборудования автоматизации и управления для создания решения автоматизации для конечных пользователей.
Интеллектуальный робот Робот, который может быть запрограммирован на выбор производительности в зависимости от сенсорных входов с минимальной или нулевой помощью со стороны человека. См. Робот.
Зона помех Зона помех — это функция, которая предотвращает помехи между несколькими манипуляторами или манипулятором и периферийным устройством. Области можно настроить до 64 областей. Три типа методов использования каждой области интерференции следующие: кубическая интерференция, вне кубической области и осевая интерференция.
Интерполяция Метод создания путей к конечным точкам. В общем, для задания движения несколько узловых точек определяются до того, как все промежуточные положения между ними вычисляются посредством математической интерполяции. Таким образом, используемый алгоритм интерполяции существенно влияет на качество движения.
ISO Международная организация по стандартизации
ISO 10218-1 Роботы и роботизированные устройства — Требования безопасности для промышленных роботов — Часть 1: Роботы Специализированная спецификация безопасности робота, которая касается требований производителя, функциональности, требуемых показателей безопасности, опасностей, мер защиты и документации для самого робота.
ISO 10218-2 Роботы и роботизированные устройства — Требования безопасности для промышленных роботов — Часть 2: Роботные системы и интеграция Сопутствующий документ ISO 10218-1. Эта спецификация безопасности предоставляет руководство как для конечных пользователей, так и для интеграторов роботов в части безопасного проектирования, установки и ввода в эксплуатацию робототехнических систем, а также рекомендуемых процедур, мер безопасности и информации, необходимой для использования.
ISO TS 15066 (ANSI RIA 15.606): Роботы и роботизированные устройства — Совместные роботы Предоставляет подробное руководство, отсутствующее в ISO 10218, части 1 или 2, по безопасному использованию промышленных роботов, работающих совместно.
Матрица Якоби Матрица Якоби связывает скорости изменения совместных значений со скоростью изменения координат конечных точек. По сути, это набор алгоритмов вычислений, которые обрабатываются для управления позиционированием робота.
РАБОТА JOB — это название Yaskawa программы для роботов, созданной с использованием языка программирования роботов INFORM компании Yaskawa. Обычно задание состоит из инструкций, которые сообщают контроллеру робота, что делать, и данных, которые программа использует во время работы.
Шарнир Часть системы манипулятора, которая обеспечивает степень свободы вращения и / или поступательного перемещения звена рабочего органа.
Совместное интерполированное движение Метод координации движения суставов, при котором все суставы достигают желаемого места одновременно. Этот метод сервоуправления обеспечивает предсказуемый путь независимо от скорости и обеспечивает самое быстрое время цикла захвата и установки для конкретного движения.
Тип шарнира движения Тип совместного движения, также известный как двухточечное движение, представляет собой метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение непосредственно в заданное положение, так что все оси достигают этого положения одновременно. Хотя путь предсказуем, он не будет линейным.
Совместное пространство а. Совместное пространство (или Совместные координаты) — это просто метод определения положения робота с точки зрения значения каждой оси, а не положения TCP.Например, исходное положение робота часто определяется в Joint Space, поскольку каждая ось находится под углом 0 градусов. б. Набор совместных позиций.
Соединения Части манипулятора робота, которые действительно сгибаются или двигаются.
Кинематика Связь между движением конечной точки робота и движением суставов. Для декартового робота это набор простых линейных функций (линейные дорожки, которые могут быть расположены в направлениях X, Y, Z), для вращающейся топологии (шарниры, которые вращаются), однако кинематика намного сложнее, включая сложные комбинации тригонометрии. функции.Кинематика руки обычно делится на прямое и обратное решения.
Захват ковша Конечный эффектор, который действует как совок. Он обычно используется для сбора жидкости, переноса ее в форму и заливки жидкости в форму. Обычно используется для работы с расплавленным металлом в опасных условиях. См. «Концевой эффектор».
Лазер Акроним от «Усиление света за счет вынужденного излучения». Устройство, которое производит когерентный монохроматический луч света, который является чрезвычайно узким и сфокусированным, но все же находится в пределах видимого светового спектра.Обычно он используется в качестве бесконтактного датчика для роботов. Роботизированные приложения включают: определение расстояния, точное определение местоположения, картографирование поверхности, сканирование штрих-кода, резку, сварку и т. Д.
Линейное движение с интерполяцией Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение в скоординированном движении, так что все оси достигают позиции одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Линейный тип движения Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение в скоординированном движении, так что все оси достигают позиции одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Ссылка Жесткая часть манипулятора, соединяющая соседние суставы.
Ссылки Статический материал, который соединяет суставы руки вместе.Тем самым образуется кинематическая цепочка. В человеческом теле звеньями являются кости.
Время цикла нагрузки Термин технологического процесса производственной или сборочной линии, который описывает полное время, необходимое для выгрузки последней заготовки и загрузки следующей.
Магнитные детекторы Датчики роботов, которые могут определять присутствие ферромагнитного материала. Твердотельные детекторы с соответствующим усилением и обработкой могут обнаруживать металлический объект с высокой степенью точности.См. Датчик.
Манипулятор Машина или роботизированный механизм, который обычно состоит из серии сегментов (соединенных или скользящих друг относительно друга) с целью захвата и / или перемещения объектов (частей или инструментов), обычно с несколькими степенями свободы. Управление манипулятором может осуществляться оператором, программируемым электронным контроллером или любой логической системой (например, кулачковым устройством, проводным и т. Д.) (ISO 8373) См. Руку, запястье и рабочий орган
.
Ручной режим См. Режим обучения.
Погрузочно-разгрузочные работы Процесс, с помощью которого промышленный робот-манипулятор переносит материалы из одного места в другое.
Робот для обработки материалов Робот, спроектированный и запрограммированный таким образом, чтобы он мог обрабатывать, резать, формировать или изменять форму, функцию или свойства материалов, с которыми он работает, в период между моментом первого захвата материалов и их выпуском в производственном процессе.
Функция сдвига зеркала С помощью функции зеркального сдвига задание преобразуется в задание, в котором траектория симметрична пути исходного задания.Это преобразование может быть выполнено для указанной координаты из координат X-Y, X-Z или Y-Z координат робота и координат пользователя. Функция зеркального смещения подразделяется на три следующих: импульсная функция зеркального смещения, функция зеркального смещения координат робота и функция зеркального смещения пользовательских координат. (см. рисунок справа)
Переключатель режима В соответствии со стандартами безопасности промышленный робот имеет три различных режима работы. Это обучение (также называемое ручным), воспроизведение (также называемое автоматическим) и дистанционное управление.Переключение между этими режимами осуществляется с помощью переключателя с ключом на подвесном пульте обучения и называется переключателем режима.
Модульность Свойство гибкости встроено в робота и систему управления путем сборки отдельных узлов, которые могут быть легко соединены или скомпонованы с другими частями или узлами.
Модуль Автономный компонент пакета. Этот компонент может содержать подкомпоненты, известные как подмодули.
Ось движения Линия, определяющая ось движения либо линейного, либо поворотного сегмента манипулятора.
Двигатель См. Серводвигатель.
Отключение звука При тестировании программы робота отключение любых устройств защиты от присутствия во время полного цикла робота или части цикла.
Автономное программирование Метод программирования, при котором целевая программа определяется на устройствах или компьютерах отдельно от робота для последующего ввода программной информации роботу. (ISO 8373) б.Средство программирования робота во время его работы. Это становится важным при производстве и производстве сборочных линий из-за сохранения высокой производительности, пока робот программируется для других задач.
Оператор Лицо, уполномоченное запускать, контролировать и останавливать запланированную продуктивную работу робота или роботизированной системы. Оператор также может взаимодействовать с роботом для производственных целей. (R15.06)
Оптический кодировщик Датчик обнаружения, который измеряет линейное или вращательное движение, обнаруживая движение маркировки мимо фиксированного луча света.Его можно использовать для подсчета оборотов, идентификации деталей и т. Д.
Оптические датчики приближения Датчики роботов, которые измеряют видимый или невидимый свет, отраженный от объекта, для определения расстояния. Лазеры используются для большей точности.
Ориентация Угол, образованный большой осью объекта относительно исходной оси. Он должен быть определен относительно трехмерной системы координат. Угловое положение объекта относительно системы отсчета робота.Смотрите Roll, Pitch и Yaw.
Паллетирование Процесс штабелирования пакетов (т. Е. Ящиков, пакетов, контейнеров и т. Д.) Организованным образом на поддоне.
Функция PAM — регулировка положения вручную Регулировка положения вручную позволяет регулировать положение с помощью простых операций, наблюдая за движением манипулятора и не останавливая манипулятор. Позиции можно регулировать как в режиме обучения, так и в режиме воспроизведения.
Функция параллельного смещения Параллельный сдвиг относится к смещению объекта из фиксированного положения таким образом, что все точки внутри объекта перемещаются на равное расстояние.В модели для параллельного смещения, показанной ниже, значение смещения может быть определено как расстояние L (трехмерное координатное смещение). Функция параллельного смещения имеет отношение к фактической работе манипулятора, поскольку ее можно использовать для уменьшения объема работы, связанной с обучением, путем смещения заданного пути (или положения). В примере на рисунке ниже обученная позиция A сдвигается с шагом на расстояние L (на самом деле это трехмерное смещение XYZ, которое может распознать робот).
Путь Непрерывное геометрическое место позиций (или точек в трехмерном пространстве), пересекаемое центральной точкой инструмента и описываемое в указанной системе координат. (R15.05-2)
Полезная нагрузка — максимальная Максимальная масса, которой робот может манипулировать при заданной скорости, ускорении / замедлении, расположении (смещении) центра тяжести и воспроизводимости при непрерывной работе в заданном рабочем пространстве. Максимальная полезная нагрузка указана в килограммах.(R15.05-2)
Кулон [Обучающий кулон] Переносное устройство ввода, связанное с системой управления, с помощью которой можно программировать или перемещать робота. (ISO 8373) Это позволяет человеку-оператору занять наиболее удобное положение для наблюдения, контроля и записи желаемых движений в память робота.
Если я меняю колеса, нужно ли мне балансировать их каждый сезон?
Разбираем подробно, в каких случаях необходимо повторно балансировать колеса.
Материалы по теме
Для начала — небольшой ликбез. Балансировкой называется совмещение центра массы колеса с осью вращения. При этом грузы закрепляют напротив тяжелой части колеса. Это определение статической балансировки. А поскольку колесо представляет собой не тонкий диск, а довольно широкий каток, то необходима так называемая динамическая балансировка, когда грузы размещаются и на наружной, и на внутренней частях колесного диска. Естественно, колеса нуждаются в балансировке сразу после монтажа шины на колесный диск: ведь дисбаланс может достигать 50–60 г на каждую сторону. Если получается больше, то имеет смысл «покрутить» шину относительно диска, обеспечив их взаимный поворот на 180 градусов. Такой изначальной балансировкой работники шиномонтажа обеспечивают дисбаланс менее 5 г на сторону. Считается, что новая покрышка способна на первых километрах несколько изменить свое положение на диске, а потому балансировка немного уйдет.
Теперь обратимся непосредственно к нашей теме. Если вы на одни и те же диски попеременно устанавливаете то зимнюю, то летнюю резину, то балансировки вам не избежать. Тут и спорить не о чем. Вопрос о балансировке каждый сезон возникает только у тех автовладельцев, которые имеют два полных комплекта колес: летних и зимних.
Материалы по теме
Итак, следует ли балансировать колеса при каждой сезонной замене?
Если подходить к процессу формально, то стоит вспомнить инструкцию к автомобилю. Обычно рекомендуется балансировать колеса после пробега от 10 тыс. до 15 тыс. км. Если вы за один сезон проезжаете меньше, то балансировать точно не следует, кроме случаев, оговоренных ниже.
Но это в теории, а на практике советую следить за поведением автомобиля. Если ощутимых биений рулевого колеса не чувствуется, то и балансировка не нужна. Биение задних колес чувствуется меньше, но и страдают они обычно реже. В любом случае, сильный дисбаланс вы должны ощутить.
Если вы сами заменяете колеса два раза в год, то для вас применима следующая рекомендация. Поставьте колеса и поездите пару дней. Шина за это время избавится от деформаций, возникших при хранении. Если на любых скоростях, с которыми вы ездите, не возникает никаких вибраций, балансировку можно не проводить.
Материалы по теме
Балансировка необходима в следующих случаях:
вы проезжаете за сезон больше 15 тысяч километров;
после последней балансировки колесо попадало на высокой скорости в глубокую яму;
в прошлом сезоне вы начали отмечать вибрацию, но отложили балансировку «на потом»;
если у вашего автомобиля нет антиблокировочной системы тормозов, а вы частенько тормозите «на юз» на асфальтовом покрытии;
вы — начинающий водитель, который не почувствует дисбаланса на колесах.
Фото: depositphotos.com
Балансировка шин
Балансировка шин – очень важный финишный этап шиномонтажа. Несмотря на то, что колеса и шины изготавливаются с очень высокой точностью, биение колеса при езде возникает довольно часто. Ехать становится неприятно, а в случае сильного биения – даже опасно: можно потерять контроль над автомобилем. Но такое случается редко.
Дисбаланс колеса может проявляться как во всем диапазоне скоростей, так и в определенных режимах. Например, нередки случаи, когда колесо начинает «бить» на скорости 80-100 км/ч, а при дальнейшем разгоне биение пропадает. А иногда можно спокойно ехать со скоростью 100-120 км/ч и почувствовать биение, разогнавшись до 130-140… В любом случае это непорядок – колеса не должны «бить» НИ НА КАКИХ СКОРОСТЯХ.
Как определить, какое из колес разбалансировано? Просто вывесив колесо и проворачивая его прямо на автомобиле, вы ничего не увидите. Это можно сделать только в специализированном шинном сервисе на профессиональном оборудовании.
Правда, бывают случаи, когда «баланс» колеса восстанавливается сам собой. Например, вы проехали по грунтовой дороге, и к колесу прилипла грязь. А если это случилось при отрицательной температуре воздуха, грязь могла примерзнуть. Постепенно она, конечно, отлетит, но какое-то время вы будете чувствовать дисбаланс и биение. Если есть подозрение на грязь, колесо нужно снять и вымыть. С качественными колесами такое случается редко: они сделаны так, что при движении самоочищаются.
Биение может быть вызвано и повреждением шины, например, если после удара она деформировалась («пошла винтом»), или на ней возникла грыжа (внутреннее расслоение каркаса). Дисбаланс такой шины ничем не исправишь – ее можно только заменить.
Если дисбаланс вызван повреждением диска, следует оценить возможность ремонта. Стальной штампованный диск можно прокатать в специальной мастерской на станке и восстановить его «круглость». С литыми дисками сложнее. Многие мастерские предлагают сделать их ремонт, в том числе даже заварить возможные трещины, однако мы считаем, что при сильном повреждении диск лучше заменить, чем рисковать, используя отремонтированный.
Если владелец автомобиля пожелает, мастер шинного центра может отдельно проверить балансировку диска перед установкой шины. Но эту операцию имеет смысл проводить только на дисках, прошедших ремонт. Проверять балансировку новых дисков, как штампованных, так и литых, в подавляющем большинстве случаев совершенно бесполезно: диски выходят с завода выполненными с ОЧЕНЬ высокой точностью, и необходимость балансировки означает простой брак (случающийся с уникальной редкостью). Шины отдельно от колес не балансируются никак.
Итак, для проведения балансировки мастер должен снять колесо с автомобиля, при необходимости вымыть его и тщательно осмотреть на предмет повреждений. Если их не видно, но есть подозрение в дисбалансе колеса, с него снимают все балансировочные грузики, накачивают шину до номинального давления и устанавливают на специальный стенд. Современное балансировочное оборудование способно работать абсолютно с любыми колесами, независимо от размера. Если в какой-либо мастерской вам отказали в балансировке по причине того, что у вас слишком большие или маленькие колеса, смело разворачивайтесь и уезжайте. В шинных центрах «Наколесах» такого быть не может.
Дисплей балансировочного стенда с высокой точностью показывает, на какую из сторон колеса следует установить балансировочные грузики и каким должен быть вес этих грузиков. Свинцовые грузики выпускаются весом от 5 до 100 г. На стальных штампованных колесах они закрепляются на закраине обода с помощью скобок, а на легкосплавные диски – приклеиваются. Устанавливать грузики на скобках на легкосплавные колеса нежелательно: стальные скобки при контакте с алюминием колеса могут вызвать местную коррозию.
Для проведения балансировки разбортировать колесо не требуется. Эта операция становится необходимой только в том случае, если грузиков для балансировки требуется много – свыше 100 г на сторону колеса. В этом случае мастер должен проверить скрытые причины сильного дисбаланса. Ими могут оказаться следы ремонта колеса (сварочные швы на диске) или шины (заплатки на ее внутренней стороне). Такое колесо лучше использовать только в качестве запасного.
Исключение составляют мощные «зубастые» шины для внедорожной езды. Для их балансировки может потребоваться много грузиков. Не следует думать, что шины для бездорожья не нужно балансировать вообще. Не проведя их балансировки, вы можете сильно пожалеть об этом на шоссе. При проведении балансировки всех колес автомобиля (например, при покупке новых шин или колес) мастера шинного центра обязательно установят те из них, на которых оказалось больше грузиков, на заднюю ось автомобиля.
Если балансировка вас не удовлетворила, и вы чувствуете биение колес или вибрацию на руле в некоторых диапазонах скоростей, вы можете вернуться в шинный центр и попросить провести перебалансировку. Кстати, в процессе езды балансировочные грузики могут отваливаться – как прикрепляемые скобками, так и приклеиваемые. Если вы заметили исчезновение грузиков, не пытайтесь купить и установить взамен их новые. Не поленитесь провести балансировку колеса в шинном центре.
Балансировка — что это и для чего нужна
Балансировка появилась относительно недавно, и многие ею пренебрегают, не видя в этом особой необходимости. Но периодически процедура действительно нужна, поскольку практически в 100% случаев центр масс и геометрический центр колеса не совпадают. Это доставляет массу дискомфорта во время езды, увеличивает износ шин и ведет к ряду других негативных последствий.
Что такое балансировка колеса?
У каждого колеса есть три важных характеристики, свойственные вращающемуся объекту:
ось симметрии;
ось вращения, на которой расположен центр тяжести;
правильная форма с расположением каждой точки колеса (окружности) на равном удалении от центра тяжести.
Когда речь идет о балансировке, имеют в виду процедуру уменьшения до приемлемого уровня дисбаланса колеса, его крепления, элементов подвески, диска и ступицы. Колесо стремятся расположить так, чтобы максимально равномерно распределить его массу относительно его центра и оси вращения. Так каждая точка окружности будет расположена на равном удалении от центра, как и положено.
Признаки нарушения баланса
Главное, на чем сказывается дисбаланс, — управляемость автомобиля. Поэтому несбалансированность колес легко распознать по следующим признакам:
автомобиль «гуляет» из стороны в сторону;
задняя часть авто вибрирует;
руль дребезжит, бьется или вибрирует.
Вибрация проявляется по-разному: от едва характерного шума до серьезной тряски, из-за которой вождение становится крайне неприятным. По типу вибрации также можно определить, где появился дисбаланс. Если в передних колесах, то дискомфорт будет ощущаться в первую очередь водителем, поскольку большая часть дисбаланса придется на руль. При появлении нарушений в задних колесах тряска возникнет в задней части автомобиля.
Выявить дисбаланс можно даже по резкому увеличению расхода топлива. Чем больше разбалансировка, тем больше бензина тратит автомобиль. Увеличение расхода особенно заметно при разгоне до больших скоростей.
Виды дисбаланса колеса
Дисбаланс — это состояние автомобиля, при котором в нем есть части, не уравновешенные между собой. Это могут быть барабаны, шины или ступицы. Их дисбаланс приводит к ухудшению управляемости автомобиля. Причиной тому становится смещение центра тяжести колеса с оси вращения, из-за чего он располагается уже не равноудаленно от всей поверхности. Такое колесо считают неотбалансированным.
Находиться идеально ровно на оси вращения колесо не может. Для контроля этого параметра в производстве автомобилей есть погрешности, которые нельзя превышать. При их расчете учитывают виды дисбаланса колеса:
Динамический. Наиболее распространенный тип дисбаланса. Характерен для широких шин, возникает по причине несовпадения оси инерции и оси вращения. Распознать такой дисбаланс легко — на скорости около 40 км/ч и больше автомобиль начинает бросать в стороны, а руль дребезжит и бьет по рукам.
Статический. Возникает реже динамического, когда центр тяжести смещается по оси вращения, которая параллельна оси инерции. Результатом становится неравномерное распределение массы колеса по длине. Его биение будет происходить в продольном направлении. Автомобиль подскакивает на любой скорости, а его руль невозможность поймать. При таком дисбалансе особенно быстро приходит в негодность подвеска.
Динамический и статический дисбаланс редко возникают изолированно. Чаще встречается комбинированный дисбаланс, который сочетает в себе оба вида. Специалисты могут легко установить тип нарушения даже визуально при подъеме машины на домкрате и прокручивании колеса.
Причины дисбалансировки
В большинстве случаев дисбаланс связан непосредственно с шинами автомобиля. К наиболее распространенным причинам разбалансировки относятся:
Все это влияет на качество отцентровки колес, что и приводит к смещению центра их тяжести и дисбалансу.
Нужно ли делать балансировку?
При езде на не сбалансированных колесах автовладелец может столкнуться с негативными последствиями, среди которых:
Ранний износ ступичного подшипника и его частые поломки.
Постоянная вибрация руля во время езды на автомобиле, а также сильный шум и тряска.
Ранний и неравномерный износ автомобильных шин (уже через несколько сотен километров они приходят в негодность).
Быстрый приход в негодность амортизаторов.
Ухудшение управляемости автомобиля из-за того, что каждое колесо приобретает свою центробежную силу. Если нарваться на выбоину, и вовсе можно попасть в ДТП.
Выкручивание болтов шаровой опоры, из-за чего она вылетает или отваливается от ступицы, что вызвано вибрацией колес.
Многие неопытные водители, даже сталкиваясь с таким дискомфортом, все равно сомневаются, нужно ли балансировать колеса. Но последствия могут быть еще серьезнее вплоть до поломки ходовой части автомобиля. К примеру, езда на колесах диаметром 14 дюймов с дисбалансом всего в 20 г при скорости 90 км/ч сравнима с ударом по подвеске кувалдой массой в 3 кг. Если учесть частоту вращения, то за минуту оно испытывает около 800 таких ударов. Теперь можно представить, какую нагрузку испытывают колеса и другие детали.
Из этого можно сделать вывод, что балансировку действительно нужно делать. Она обеспечивает комфортную езду по дорогам любого вида и качества. Также балансировка колес выполняет еще несколько важных функций:
увеличивает срок эксплуатации колес;
исключает появление лишних шумов от шин во время езды;
обеспечивает хорошую управляемость на любых скоростях;
делает износ шин равномерным и одинаковым со всех сторон.
Когда необходима балансировка и как часто ее нужно делать?
В каких случаях балансировку считают обязательной процедурой:
После удара колеса о бордюр.
После сезонной и обычной смены резины.
Если во время езды в салоне появилась ощутимая вибрация.
После ударов руля на скорости выше 60 км/ч.
При попадании автомобиля в выбоину или глубокую дорожную яму.
После ремонта одного или нескольких колес.
Своевременное обращение к специалистам поможет не только избежать преждевременного износа, но и обеспечить безопасность поездки по любым дорогам и при любой скорости. Законов, которые делали бы балансировку обязательной, не существует. Но все же не стоит ее избегать: ремонт в связи с дисбалансом может обойтись дорого, а в худшем случае из-за плохой управляемости могут пострадать пассажиры и сам водитель.
Если говорить о частоте балансировки, то здесь стоит придерживаться следующих принципов:
Оптимальным считают проведение такого технического обслуживания каждые 5000 км пробега.
При частой езде по плохой дороге с попаданием в выбоины стоит обращаться за балансировкой чаще — через каждые 1000-1500 км пробега.
Соблюдение этих правил обеспечивает правильный равномерный износ шин даже в случае появившегося дисбаланса. В результате автовладельцу можно будет обойтись просто балансировкой и избежать полной замены колес, что экономит и время, и деньги.
Выводы о необходимости балансировки
Поскольку причина дисбаланса чаще всего кроется в шинах, которые сильно износились или были изготовлены некачественно, то одной балансировки в таком случае будет недостаточно. Для начала необходимо произвести замену покрышек и уже их отбалансировать. Своевременная балансировка колес при смене резины и в других случаях гарантирует подвеске и шинам продолжительный срок эксплуатации, а водителю — безопасную и комфортную езду.
Балансировка колес — это важный процесс для устранения дисбаланса
Соглашение о конфиденциальности персональной информации
Во исполнение требований Федерального закона от 27.07.2006 г. № 152-ФЗ «О персональных данных» (с изменениями и дополнениями), Федерального закона от 13.03.2006 N 38-ФЗ «О рекламе» с изменениями и дополнениями), настоящее соглашение о конфиденциальности персональной информации (далее – Соглашение), заключается между компанией ООО «НПФ Дюкон» (официальным дилером оборудования материалов для шиномонтажа Tech), ее обособленными подразделениями (далее – Компания) и любым пользователем сайта Компании www.tech-russia.ru (далее – Сайт). Соглашение действует в отношении всей информации, которую Компания может получить о пользователе во время использования им Сайта.
1. Персональная информация пользователей, которую получает Компания
1.1. В рамках настоящего Соглашения под «персональной информацией пользователя» понимаются:
1.1.1. Персональная информация, которую пользователь предоставляет о себе самостоятельно при регистрации и/или оставлении заявки на получение предложения и/или подписании на получение рекламной информации путем заполнения веб-формы на Сайте Компании и его поддоменов, направляемой (заполненной) с использованием Сайта. Обязательная для заполнения информация помечена специальным образом. Иная информация предоставляется пользователем на его усмотрение.
1.1.2. Данные, которые автоматически передаются счетчикам на Сайте в процессе его использования, в том числе IP-адрес, информация из cookies, информация о браузере пользователя (или иной программе, с помощью которой осуществляется доступ к Сайту), время доступа, адрес запрашиваемой страницы.
1.2. При заполнении форм на Сайте пользователь предоставляет следующую персональную информацию: фамилию, имя, номер мобильного телефона, адрес электронной почты, город проживания. Компания исходит из того, что пользователь предоставляет достоверную и достаточную персональную информацию по вопросам, предлагаемым в формах. Ответственность за правильность и достоверность вводимых персональных данных Пользователь несет самостоятельно.
1.3. Предоставление пользователем своих персональных данных означает безоговорочное согласие пользователя с настоящим Соглашением и указанными в нем условиями сбора, записи, систематизации, накопления, анализа, использования, извлечения, распространения, передачу иным третьим лицам (включая, но не ограничиваясь: организациям владельцам-серверов; организациям, оказывающим услуги по осуществлению звонков, смс-рассылок, любых иных видов рассылок и уведомлений; организациям, оказывающим услуги по проведению различных опросов и исследований и пр.), получения, обработки, хранения, уточнения (обновления, изменения), обезличивания, блокирования, удаления, уничтожения персональных данных пользователя путем ведения баз данных автоматизированным, механическим, ручным способами персональной информации; в случае несогласия с этими условиями пользователь должен воздержаться от предоставления своих персональных данных на Сайте.
2. Цели сбора и обработки персональной информации пользователей
2.1. Компания собирает через сайт Компании и хранит только те персональные данные, которые необходимы для:
ведения и актуализации клиентской базы;
получения и исследования статистических данных об объемах продаж и качестве оказываемых услуг;
проведения маркетинговых программ;
изучения конъюнктуры рынка по продаже оборудования, запасных частей и аксессуаров, услуг по проведению диагностики, ремонту оборудования;
проведению опросов и исследований, направленных на выявление удовлетворенности/неудовлетворенности пользователя, постоянного совершенствования уровня предоставляемых услуг;
информирования пользователей о предлагаемых Компанией оборудовании, запасных частях и аксессуарах, оказываемых услугах, проводимых бонусных мероприятий, акций и т.д.;
рекламирования и иного любого продвижения товаров и услуг на рынке путем осуществления прямых контактов с пользователями;
реализации оборудования, в том числе, но не ограничиваясь, оформление договоров оказания сервисных услуг;
технической поддержки при обработке информации, документации и персональных данных с использованием средств автоматизации и без такого использования, а также с помощью иных программных средств, специально разработанных по поручению Компании.
3. Условия обработки персональной информации пользователя и её передачи третьим лицам
3.1. Компания обязуется не разглашать полученную от пользователя информацию. Вне пределов, указанных в пункте 2.1. настоящего Соглашения, информация о пользователях не будет каким-либо образом использована. Доступ к таким сведениям имеют только лица, специально уполномоченные на выполнение данных работ, и предупрежденные об ответственности за случайное или умышленное разглашение, либо несанкционированное использование таких сведений.
3.2. В отношении персональной информации пользователя сохраняется ее конфиденциальность. При использовании форм обратной связи, например таких, как «Задать вопрос», «Оставить отзыв» и др., пользователь соглашается с тем, что определённая часть его персональной информации (Имя, Город) становится общедоступной.
3.3. Принятие настоящего соглашения признается пользователем и Компанией как письменное согласие на обработку персональных данных пользователя и получение данным рекламы, согласно ст. 9 Федерального закона от 27.07.2006 г. №152-ФЗ «О персональных данных» (с изменениями и дополнениями) и ст.18 Федерального закона от 13.03.2006 г. №38-ФЗ «О рекламе».
4. Изменение, удаление пользователем персональной информации
4.1. Пользователь имеет право на доступ к своим персональным данным, также вправе требовать уточнения (обновление, изменение) его персональных данных, а также удаления и уничтожения персональных данных в случае их обработки Компанией, нарушающей законные права и интересы пользователя, в соответствии с законодательством Российской Федерации.
4.2. Пользователь в любой момент может удалить предоставленную им в рамках Соглашения персональную информацию, отправив письмо в Компанию по электронной почте и указав при этом введённые персональные данные. Администратор Сайта обязуется рассмотреть и ответить на письмо в трехдневный срок с момента его получения и предпринять все необходимые меры для безвозвратного удаления персональных данных с Сайта.
5. Меры, применяемые для защиты персональной информации пользователей
5.1. Компания принимает необходимые и достаточные организационные и технические меры для защиты персональной информации пользователя от неправомерного или случайного доступа, блокирования, копирования, распространения, а также от иных неправомерных действий с ней третьих лиц.
6. Изменение Соглашения о конфиденциальности персональной информации
6.1. Компания оставляет за собой исключительное право в одностороннем порядке вносить изменения и дополнения в настоящее Соглашение. При внесении изменений в актуальной редакции указывается дата последнего обновления. Новая редакция Соглашения вступает в силу с момента ее размещения, если иное не предусмотрено новой редакцией Соглашения.
Настоящее Соглашение о конфиденциальности персональной информации было обновлено последний раз «27» июня 2017 года.
Балансировка колёс автомобиля – цены на балансировку в Москве
Балансировка колес – очень востребованная услуга, от качества выполнения которой напрямую зависит срок эксплуатации техники, безопасность не только водителя, но и пассажиров. Она существенно улучшает управляемость транспортным средством на дороге.
Причины дисбаланса
Дисбаланс может спровоцировать неустойчивость машины на сложной трассе, стать причиной ДТП. Кроме того, от дисбаланса страдают колеса, он существенно уменьшает срок эксплуатации шин. Дисбаланс возникает по разным причинам, в том числе из-за:
деформации автомобильных дисков;
нарушения формы колеса;
выхода из строя некоторых деталей техники;
аварий.
При появлении минимальных признаков вибрации, которая свидетельствует о проблеме, необходимо безотлагательно обратиться за помощью к профессионалам и посетить сервисный центр.
Разумнее выделить некую сумму на своевременные шиномонтажные работы, чем потом тратить значительные финансовые средства на покупку новых колес или устранение серьезных проблем.
Балансировать колеса необходимо для равномерного распределения их массы по отношению к вращательной оси. Такие работы выполняются в обязательном порядке после замены шины, ремонта ходовой. Также после замены резины балансируют колеса, поэтому такая процедура должна выполняться не реже 2 раз в год, а при необходимости – гораздо чаще.
Для решения задачи специалисты пользуются балансировочным стендом, применяют оборудование с чувствительными датчиками для получения максимально эффективного результата. При дисбалансе применяется груз. Такая работа требует точности и большого опыта, внимания и применения современного оборудования. Также для достижения баланса используется современный балансировочный станок.
Доступная цена балансировки колес
Заказать балансировку колес легковых автомобилей приглашаем на сайте ООО «Лорриплюс». Специалисты компании имеют необходимый опыт и навыки, используют современное оборудование, с легкостью решают даже самые сложные задачи и заботятся о каждом клиенте. Мы работаем с юридическими и физическими лицами, по наличному и безналичному расчету.
Мы предлагаем клиентам:
балансировку колес на выгодных условиях;
оперативную помощь в любое время суток, в выходные и праздничные дни;
доступную цену обслуживания, замены колес.
Мастера компании специализируются на балансировке как легковых, так и грузовых автомобилей. Уточнить цены на самые популярные услуги, задать менеджерам интересующие вопросы предлагаем по телефону компании. Специалисты всегда находятся на связи, оперативно реагируют на каждый вызов и помогают клиентам решить даже самые сложные проблемы, в том числе починить покрышки, осуществить их монтаж и устранить порезы.
Мы предлагаем не только привлекательную стоимость всех услуг, но также дополнительные скидки и бонусы как для постоянных, так и для новых клиентов. Сотрудничать с нами очень удобно и выгодно, в чем уже смогли убедиться многие автовладельцы и руководители компаний. Специалисты компании готовы снять с вас груз ответственности за машину и позаботиться о ее обслуживании!
Легковые автомобили
Наименование работ
Размер колеса
R-12 R-13
R-14
R-15
R-16
R-17
R-18
R-19
R-20
Джип Кроссовер
Низкий профиль от 50% и Run Flat
Хаммер до R-16
Хаммер более R-16
Мойка при балансировке обязательна
Мойка 1-го колеса
50
Балансировка
Балансировка одного колеса стальной диск
50
60
70
90
100
100
150
150
150
150
200
300
Балансировка одного колеса литой диск
70
80
90
120
130
150
200
200
200
200
250
350
Набивной груз до 50гр.
15
Набивной груз более 50гр.
20
Клеящийся груз одна пластина
50
Грузовые автомобили
Наименование работ
Размер колеса
Газель, Баргузин, Соболь, Портер и т.п.
Бычок и т.п.
Хундай 68;72;78; Валдай, Фотон, Бав и т.п.
Газ, Зил, Разборный диск
МАЗ, КАМАЗ и т.п.
Другие колеса диск до R-22.5
Другие колеса Диск R-22.5 и более
Автобусы
Погрузчики трактора Спец.тех до R-18
Погрузчики трактора Спец.тех R-18 и более
Балансировка
Балансировка одного колеса
100
120
150
150
200
150
200
200
250
250
Груз легковой
20
Груз набивной грузовой до 300г.
120
Груз набивной грузовой более 300г.
150
Груз клеящийся грузовой
150
Стоимость работ 1-го колеса без ремонта, балансировки и грузов.
300
360
500
550
700
550
600
600
900
1100
Спецтехника
Наименование работ
Размер колеса
Автобусы
Погрузчики трактора Спец.тех до R-18
Погрузчики трактора Спец.тех R-18 и более
Балансировка
Балансировка одного колеса
200
250
250
Груз легковой
20
Груз набивной грузовой до 300г.
120
Груз набивной грузовой более 300г.
150
Груз клеящийся грузовой
150
Стоимость работ 1-го колеса без ремонта, балансировки и грузов.
600
900
1100
Балансировка колеса
Вращающееся колесо испытывает на себе действие инерционных сил. Величина этих сил зависит от величины несовпадения оси вращения с центром масс его сечений, перпендикулярных этой оси. Присутствие таких несовпадений называется дисбалансом колеса. Дисбаланс в колесе компенсируется установкой на колёсном диске специальных балансировочных грузов с внешней и внутренней стороны диска. Эти массы обеспечивают создание инерционных сил, равных по величине и противоположных по направлению силам, вызванных дисбалансом. Но это, так сказать, формальная сторона вопроса. Необходимо различать природу дисбаланса в определениях:
А – «КЛАССИЧЕСКИЙ ДИСБАЛАНС» как неравномерное распределение массы, не являющейся следствием нарушения линейности вращения колеса
В — «ГЕОМЕТРИЧЕСКИЙ ДИСБАЛАНС». — Дисбаланс, усугублённый геометрическим отклонением.
Хорошая балансировка определяется отсутствием биения колеса в любом диапазоне скоростей, и важнейшей предпосылкой для этого является его безупречная геометрия. Она обусловлена тремя факторами: геометрией шины, диска и отношением положения шины к диску. Масса балансировочных грузиков – это второстепенный критерий. При выборе в установке колеса на переднюю ось автомобиля, отдаётся предпочтение колесу с лучшей геометрией (предпочтительно с менее выраженным осевым биением). Все эти нюансы хорошо видны мастерам в процессе балансировки. На переднюю ось желательно ставить равномерно изношенные по протектору шины. Разумеется, так же нельзя пренебрегать и соображениями безопасности. Запрещается ставить на переднюю ось колёса со значительной стёртостью протектора, а так же после их серьёзного ремонта. Комфорт не должен идти в ущерб безопасности вождения. В свете вышесказанного становится понятным, чтобы произвести качественную балансировку, при установке колёс на переднюю и заднюю ось, важно выбрать их по геометрии. Здесь имеют преимущества те шиномонтажи, у которых есть возможность вывесить машину сразу на 4 опоры.
В чём опасность геометрического дисбаланса? Объясню сразу на примере. Даже отбалансированое в 0\0 колесо будет «бить», если на колесе «восьмёрка». Почему так получается? Потому что колесо не крутится по воздуху, оно взаимодействует с дорогой. Даже если балансировка была произведена надлежащим образом, нарушенная геометрия колеса изменила линейность его вращения. В СОПРИКОСНОВЕНИИ колеса с дорогой, машину по вектору вращения колеса, начинает таскать из стороны в сторону. Это ощущается даже вибрацией кузова! Начинают работать более пластичные элементы системы (подмятие шины, стойка…) это чревато не только неравномерным износом резины. Это убивает ходовую! К тому же колесо с нарушенной геометрией не обеспечивает равномерное сцепление с дорогой. Это опасно при торможении и манёвре на больших скоростях. Но если всё же вы решили сэкономить на ремонте диска (если в этом причина), ставьте такие колёса назад, поскольку там нет таких чувствительных узлов. Но имейте ввиду, что такая экономия не покроет затраты на ремонт машины)).
Чем вы больше требуете от своей машины, тем тщательнее должны относиться к своим колёсам. Весь потенциал машины раскроется только с хорошими колёсами. Когда они все ровные и правильно отбалансированы — машина поёт как струна!
Меня иногда спрашивают какой профиль шины лучше ставить. Мне кажется выбирать нужно что-то среднее между понтовством и практичностью. Заниженная резина конечно лучше сохраняет свою форму. Чем ниже профиль шины, тем меньше вносит она свой дисбаланс в общую картину. Но, и в то же время, в меньшей степени способна сглаживать огрехи диска. А ведь именно на заниженной резине диски и страдают больше всего от ударов. Это актуально на наших дорогах.
Есть несколько способов улучшить геометрию колеса: Компьютерная программа «Оптимизация». Смысл её сводится к тому, чтобы дисбаланс диска уравновешивать дисбалансом резины, т.е. найти такое оптимальное положение шины относительно диска, которое позволяет уменьшить осевое биение, что в результате уменьшает и массу балансировочных грузиков. Так же будет не лишней тратой денег прокатать диск, если это необходимо.
Зачастую дисбаланс бывает следствием того, что шина не до конца села на диск, на своё посадочное место. Это можно заметить на балансировке по характеру вращения колеса. Увы. даже совершенно новая резина не всегда садится на борта диска как надо. Поэтому в некоторых случаях линейность становятся лучше только после некоторого времени обкатки. (Это как новые ботинки, которые нужно разносить). После обкатки, сами корректирующие груза начинают давать дисбаланс, поэтому рекомендуется перебалансировать такие колёса после 500 км. пробега. Что можно попробовать сделать в этом случае? Отжать борта и смазать диск машинным маслом вместо пасты (масло имеет лучшее скольжение в отличии от пасты). Накачать колесо до 3 атм. и при избыточном давлении простучать у борта диска резиновой кувалдой. В некоторых случаях геометрия так и не восстанавливается, если, например, по каким-то причинам резина уже потеряла свою форму. Во многом залог хорошей балансировки — это руки мастера. Хороший мастер всегда определяется умением из г**на сделать конфетку!
Причиной биения колёс может стать отсутствие центровочных колец. По поводу необходимости центровочных колец вопрос уже неоднократно поднимался на разных автофорумах. Повторюсь. Как мы все знаем, окончательная центровка колеса осуществляется болтами или гайкой, поэтому формой шляпки болт должен максимально прилегать к впадинке болтового отверстия диска, исключая увод при затяжке. Понятно что округлая впадинка должна затягиваться гайкой или болтом сферической формы, а если в виде конуса, то конической. Ну естественно так же необходимо удостовериться что PSD диска соответствует миллиметр в миллиметр PSD ступицы. А так же убедиться, что ничто не мешает плотному прилеганию диска к ступице. Ничего нового я не сказал и Америку не открыл. Мне самому это не понятно))). Есть стандартный ряд дисков, комплектуемых производителем под конкретный автомобиль, у которых центральное отверстие DIA больше ступичного, либо оно вообще никак не выступает в отверстие диска, т. е. колесо центруется исключительно на одних болтах, и эксплуатация таких дисков без центровочных колец не вызывало у водителей никаких нареканий. Одно могу сказать точно, ибо сталкивались на практике. Когда на балансировке само колесо показывало исключительную геометрию, но по непонятной причине сохранялось биение — здесь вывод один: присутствует однозначная проблема с соосностью колеса и ступицы. Во многих случаях после установки центровочных колец вибрация пропадала. Так же в некоторых случаях вибрация пропадала даже после ослабления и перетяжки болтов. Не ругайте меня сильно, если вам покажутся мои доводы наивными. Я больше практик, а не теоретик. Если расстояние между ступицей и внутренним отверстием диска имеет зазор, мы рекомендуем ставить центровочные кольца.
Балансировка балансировке – рознь, друзья. Присутствие на цифровом дисплее 0\0 – ещё не факт по определению, качественной балансировки колеса. Исключительно важно произвести его правильную центровку. Какой бы не был навороченный аппарат, если центровка производится ненадлежащим образом, колесо нельзя считать отбалансированным. (В этом можно убедиться попросив ослабить крепление колеса на шпинделе балансировочного станка, и, повернув его на 180 градусов, отбалансировать снова. По нашему мнению наиболее правильная центровка возможна только с применением специальных балансировочных адаптеров Haweka. Не реклама это конечно — просто наше мнение. Ну и конечно же руки мастера – не последнее в этом подспорье.
Перед балансировкой колесо следует очистить от грязи. Любая грязь создаёт массу. Балансировка будет производиться с коррекцией на эту массу. Соответственно, когда грязь отвалится, колесо будет снова неотбалансированным.
Что должно быть понятно любому начинающему шиномонтажнику? То, что плоскостей коррекции у колеса только ДВА (по одной на каждую сторону), соответственно и грузики с каждой стороны должны устанавливаться всегда вряд, а не где попало (за исключением балансировки по программе SLIP, когда груза специально разделяются, чтобы их было можно спрятать за спицами диска). При балансировке легкосплавных дисков, для снижения веса балансировочных грузиков они должны располагаться максимально близко к ободам диска. Надо понимать что когда вместо набивных грузов используются клеящиеся на внутреннюю поверхность диска, то вес груза возрастает раза в полтора, за счет уменьшения рычага противовеса, особенно с внешней стороны диска. А так же если с третьей-четвёртой попытки не удаётся отбалансировать колесо, потому что масса грузов с каждым измерением постоянно меняется, значит внутри колеса вода или мусор. Без нервов бортируем шину, чистим всё внутри и балансируем колесо снова.
Пару слов на счёт цветных маркеров на шине, которые, при монтаже на диск, якобы нужно совместить строго с соском, что позволяет в свою очередь уменьшить массу балансировочных грузов и типа того. Не знаю кому эта мысль пришла первой в голову, но с тех пор она прочно прижилась в умах автолюбителей. Я встречал много упоминаний об этом в интернете, но ни один не сослался на официальные предписания производителей шин относительно их назначения. Мне же кажется это заводские маркеры какие-то для автоматизации процесса сортировки или чего-то там ещё. Хотя бы даже потому, что маркируется шина только с одной стороны. И как в таком случае быть, если шина должна собираться маркером вниз? Как в этом случае его совмещать с соском? И почему такие уважаемые фирмы как Mishelin и Pirelli не додумались до такого «гламура» ставить эти красные и жёлтые точки?)) Утверждение это беспочвенное и к балансировке не имеет никакого отношения – доказано эксперементально)). Иногда даже разворот в противоположную сторону от соска даёт лучшие результаты на балансировке. И вообще, максимально точно совместить шину с диском возможно только с использованием современного балансировочного оборудования. Такой процесс совмещения мы называем «оптимизация».
Ещё один распространённый бред на счёт того, что будто легкосплавные диски легче стальных. Возьмите сами в руки оба диска и сравните!)) Правда, среди них есть и очень лёгкие диски, но этот факт не стоит обобщать ко всему подряд, приписывая в этом абсолютное преимущество. Такие диски в общем отношении к обычному литью попадались мне очень редко.
Неравномерный износ протектора является одной из причин геометрического дисбаланса. Но дисбаланс ещё не самая большая неприятность, которую таит в себе шина, имеющая грыжу на беговой. Любая выступающая неровность шины начинает протираться в контакте с дорогой. Иногда настолько, что обнажается стальной каркас и проволока лезет наружу. Такое колесо непригодно для эксплуатации! Но некоторые особенно «бережливые» водители, вопреки всякому здравому смыслу, ставят камеры, рубашки какие-то… Друзья. Всей вашей экономии не хватит даже на похороны. Никому конечно такой участи не желаю, но в каждой шутке, как говориться, есть доля правды. Горбатая резина — это очень опасно! Если вдруг изменилась динамика машины, началась вибрация кузова и пр. – настоятельно советуем осмотреть все колёса на предмет дефекта шин.
Автор статьи: Иванов Артём.
Копирование полное или частичное данной статьи разрешается только со ссылкой на наш сайт http://shina. me
Все статьи
Балансировка колес (шин) с помощью гранул (порошка). Принцип балансировки, достоинства, недостатки, особенности
Наше повествование можно начать с фразы, что все новое, это хорошо забытое старое. Именно такой лозунг можно применить и к балансировке колеса с помощью гранул. Вроде как данная инновация не может показаться такой уж заезженной и давно известной, ведь прогрессивность метода балансировки колес за счёт гранул или как еще называют порошка, довольно заурядная. А значит по логике, должна относится к последним изобретениям. Однако гримаса истории и «железный занавес», который весел над нашей страной, известным образом сыграли с нами злую шутку. Мы многое и элементарное узнали лишь после его падения, а кое-что, узнаем и до сих пор. Именно так можно сказать и о методе балансировки колес с помощью гранул или как мы уже сказали с помощью порошка.
Об истории автоматической балансировки колес с помощью гранул
Итак, давайте вначале окунемся в некий экскурс истории, в далекий 54-59 год прошлого века. Именно в эти года был завялен и запатентован метод автоматической балансировки для колес машин и даже колесных пар железнодорожных составов от John C Wilborn. Патент зарегистрирован в Патентном бюро США под номером US 2909389, под наименованием Automatic wheel balancer. То есть в далеком 1954 году, 18 ноября, данное открытие было заявлено, а 20 октября 1959 года опубликовано. Чтобы не быть голосовым, мы даже приведем иллюстрацию выдержку из этого патента, где уже угадывается тот самый способ балансировки колес (шин) с помощью гранул.
На самом деле, таких патентов и упоминаний более чем много за 50 лет. Конкретно этим примером мы лишь хотели показать, что история у принципа автоматической балансировки шин (колес) довольно уже значительная. Что же, теперь давайте предметнее поговорим о том, что собой представляют гранулы, так называемый в народе порошок для балансировки колес.
Как выглядят гранулы для балансировки колеса (шин) и какими свойствами они должны обладать
Гранулы для балансировки представляют шары, то есть тело правильной формы. Это необходимо для того, чтобы обеспечивать равнозначное сцепление с поверхностью по всей форме тела. Кроме того, гранулы покрыты силиконом, а в центре имеют тяжелое керамическое или стеклянное ядро. Силикон демпфирует удары гранул, и позволяет подстроиться под форму поверхности, к которой они будут «прилипать». Тяжелое ядро необходимо для того, чтобы максимально участвовать в процессе балансировки колеса, то есть при «правильном» распределении оказывать «положительное» действие. В итоге, гранулы должны обладать довольно интересными свойствами. В-первую очередь они должны хорошо накапливать статическое электричество, то есть обладать электростатическим полем, за счет которого они будут фиксироваться на месте. Во-вторых, иметь как можно больший вес, чтобы оказывать влияние на балансировку колеса. То есть это факторы, которые отчасти противоречат один другому. Ведь при большом весе трудно удержать гранулы за счет электростатики, а при незначительном весе их смысл теряется. Поиск должного соотношения между этими величинами, выбор материала, обеспечивающего высокое напряжение статического поля, другие индивидуальные особенности гранул, все это можно отнести к ноу-хау каждого отдельного производителя, которые вряд ли вам раскроют свои секреты.
Как отбалансировать колесо (шину) с помощью гранул (порошка)
Теперь вкратце расскажем о процессе балансировки шины, колеса, с помощью гранул (порошка). В первую очередь его необходимо засыпать гранулы в колесо, а для этого необходимо знать, сколько засыпать в каждое конкретное колесо, чтобы обеспечить балансировку. Засыпаешь мало — не обеспечишь балансировку. Много – получишь лишний вес. Обычно производители предлагают рекомендательные таблицы, в которых прописано, сколько грамм гранул необходимо засыпать в определенный типоразмер колеса. Вот пример такой таблицы, которая абсолютно не является догмой для всех видов гранул, но дает представление о том, что объем и масса гранул увеличиваются от меньшего размера колеса к большему.
Теперь о том, как же можно с помощью таких гранул отбалансировать колесо. Первоначально гранулы необходимо засыпать в полость шины, либо камеры, о чем мы уже говорили. В этом случае применяется один из следующих вариантов. Первый, когда гранулы засыпаются в полость шины при ее монтаже на колесо. Второй, когда выкручивается ниппель, и гранулы засыпаются через штуцер.
В принципе на этом, с вашей стороны процесс балансировки заканчивается. Далее вам остается лишь накачать колесо до должного давления и отправиться в путь. Процесс балансировки пройдет автоматически. Гранулы распределяться в полости камеры и покрышки таким образом, что дисбаланс при вращении колеса будет минимален, то есть колесо самоотбалансируется. О том, как же это происходит, о принципе «правильного» распределения гранул, мы как раз и расскажем в нашем следующем абзаце.
Принцип балансировки колеса (шины) с помощью гранул для балансировки
Итак, давайте вначале соберем воедино, все то, что мы знаем о гранулах для балансировки из выше написанного. Гранулы обладают сбалансированными свойствами по весу и электростатическому полю, которое позволяет им удерживаться на поверхности шины (резины). Гранулы засыпаются в достаточном объеме, чтобы обеспечить балансировку, но не более. Теперь давайте представим, что произойдет при движении, в случае если колесо не отбалансировано и в него засыпаны эти самые гранулы. Само собой, колесо при вращении будет подпрыгивать от неравномерности распределения центробежной силы по всему периметру. Тем самым будут наблюдаться вибрации, толчки, подпрыгивания… Все эти значимые механические воздействия постоянно будут встряхивать гранулы, которые находятся в колесе. В итоге, они то и дело будут хаотично перемещаться по объему до тех пор, пока колесо не «успокоится». А «успокоиться» колесо лишь в одном случае, когда центробежная сила по всему периметру, а значит и масса, будет уравновешено, то есть колесо окажется отбалансированым. В этом случае вибрации ослабнут до таких пределов, что электростатической и центробежной силы, удерживающей гранулы, хватит на то, чтобы они оставались в своем положении, то есть обеспечивали балансировку колеса. Можно сказать, что балансировка в этом случае происходит автоматически и самопроизвольно, хотим ли мы этого или нет.
Это является своеобразной особенностью, на принципе которой и «работают» гранулы (порошок) для балансировки колес. Для того, чтобы вам было более понятно, мы приведем вам в пример крошку от пенопласта. Каждый видел, как порой пенопластовая крошка – шарики, хорошо липнет к предметам. При этом если ее сильно встряхнуть, то она поменяет свое место, но зачастую окажется недалеко от первоначального местоположения. Примерно тоже самое происходит и в шине. Также в качестве примера можно привести и центрифугу стиральной машины. Первоначально, пока белье еще не распределено по всей поверхности барабана, стиральная машина может смещаться и подпрыгивать, но затем, за счет центробежной силы, белье распределяется таким образом, что появляется некий более-менее стабильный баланс, то есть машина успокаивается, дальнейший отжим белья происходит без вибраций.
Подводя итог о балансировки колес (шин) с помощью гранул для балансировки
Давайте теперь резюмируем все достоинства и недостатки гранул для балансировки или как еще говорят порошка. Плюсы очевидны. Вам не нужен станок для балансировки. При значительном износе, вырыве протектора, замятии диска, произойдет самобалансирование. Гранулы поменяют свое положении, тем самым обеспечат желаемый результат без какого-либо труда, что особо важно на трассе и в дальних поездках. Однако и минусов хватает. Балансировочные гранулы держаться внутри лишь только за счет электростатической и центробежной силы, тем самым, при каждом значительном толчке, гранулы могут слететь со своих мест, тем самым произойдет разбалансировка, которая хотя и восстановиться через несколько километров, но некоторое время колеса будут разбалансированы. То есть балансировочные гранулы «не любят» неровных дорог. Второе, они довольно тяжеловаты для легковых машин. Ведь как вы заметили, если читали нашу статью сначала, минимальная масса засыпаемых гранул порядка 100 грамм. Это довольно много для легковых машин, когда порой достаточно груза в 5 -7 грамм. Зачем дополнительно «вешать» на колеса лишнюю массу, которая будет участвовать в инерционных процессах при разгоне и торможении, увеличивать усилия воздействия на подвеску и подшипники. Можно утверждать, что балансировочные гранулы оправданы для грузовых машин и на ровных дорогах. Именно в этом случае есть резон применять и использовать подобное ноу-хау, как автоматическая балансировка колес!
Как я узнаю, что мои шины нуждаются в балансировке?
Балансировка шин — это настройка вашего комплекта колес и шин. Он обеспечивает равномерное распределение веса по всей окружности устройства. Распространенными симптомами дисбаланса шин являются неравномерный и более быстрый износ протектора, плохая экономия топлива и вибрация рулевого колеса, половицы или сиденья, которая усиливается на более высоких скоростях.
Когда все части блока колесо-шина имеют как можно более равный вес, шина будет катиться плавно.Это способствует равномерному износу и продлевает срок службы. Балансировка также способствует комфорту езды: несбалансированные шины будут раскачиваться или подпрыгивать вверх и вниз, что вызывает вибрацию. Если переднее колесо не сбалансировано должным образом, вы, скорее всего, почувствуете вибрацию в рулевом колесе. Если проблема в задней части, тремор будет заметен в сиденье или полу.
Несбалансированные шины легко поправляются, но работа точная. Это делается путем прикрепления к колесу небольших грузов, размером всего лишь доли унций.
Как колеса выходят из равновесия?
Повседневный износ шин способствует дисбалансу.Нормальные производственные дефекты также являются причиной: шины и колеса не имеют точно равного распределения веса. В некоторых местах они будут немного тяжелее.
Разницы в весе всего пол унции достаточно, чтобы вызвать вибрацию во время движения.
Как выполняется ребалансировка шин
Повторная балансировка выполняется в шинном цеху путем помещения блока колесо-шина в машину для балансировки шин, которая выполняет измерения для определения более легких или тяжелых участков и внесения корректировок с учетом этих различий в весе.Лучшее время для этого — когда шины меняются, как для удобства, так и потому, что у вас может быть несбалансированная шина на задней части автомобиля, и вы не почувствуете этого, пока не переместите ее вперед.
Вот как это делается:
Шина, установленная на колесе, прикреплена к машине для балансировки шин.
Колесо вращается во время измерения вибрации. Это сообщает технику, равномерно ли распределен вес, сколько веса нужно добавить и где на колесе его прикрепить.
При обнаружении дисбаланса технический специалист может повторно сбалансировать и отрегулировать грузы (добавить дополнительные). Но иногда требуется, чтобы техника также переместила шину на колесе, а затем перебалансировала. Это связано с тем, что тяжелые места на колесе и на шине иногда могут совпадать, вызывая больший дисбаланс, который необходимо исправить.
Балансировка и центровка
Хотя оба они должны быть частью регулярного технического обслуживания автомобиля, балансировка — это не то же самое, что выравнивание.Регулировка углов установки колес корректирует углы наклона шин, так что они движутся в одном направлении и должным образом контактируют с дорогой. Регулировка снижает неравномерный износ шин и продлевает срок их службы. Часто балансировка и регулировка шин воспринимаются как одно и то же, но это не так.
Когда выполнять балансировку шин:
Вы чувствуете вибрацию в рулевом колесе, половице или сиденье.
Вы меняете их, как правило, каждые 5000 миль.
Не реже одного раза в два года, один раз в год, если вы едете по неровным дорогам.
Вы спустили шину и отремонтируете ее.
Вы покупаете любые новые шины.
Груз, который раньше был на ободе, отваливается.
Вы замечаете неравномерный износ шин.
Балансировка и вращение шин часто выполняются одновременно, но это не одно и то же. Вращение шин — это когда передние и задние колеса автомобиля переключаются для выравнивания износа протектора между ними.Поскольку оба требуют снятия каждого колеса, удобно делать это одновременно.
Вибрация на ходу может быть вызвана несбалансированной шиной и колесом в сборе или чем-то еще — погнутым колесом, поврежденной шиной (которая не может быть исправлена балансировкой), изношенными деталями подвески или другими стареющими компонентами. Если вы чувствуете вибрацию, не ждите, пока ее диагностируют. Вы предотвратите другие проблемы и получите удовольствие от более плавной езды, когда ваши шины будут хорошо сбалансированы.
Назначить встречу
Разъяснение по балансировке колес
Балансировка колес — это процесс уравновешивания веса шины и колеса в сборе таким образом, чтобы они равномерно перемещались на высоких скоростях.Для балансировки необходимо поместить смонтированное колесо и шину на балансировочное устройство, которое центрирует колесо и вращает его, чтобы определить, куда должны идти грузы. Каждый раз, когда колесо впервые устанавливается на автомобиль с новой шиной, его необходимо сбалансировать. Цель состоит в том, чтобы обеспечить равномерное распределение веса по всем колесам и шинам транспортного средства. Этот процесс выравнивает тяжелые и легкие пятна на колесе, так что оно вращается плавно. Если есть даже небольшая разница в весе колес, это вызовет достаточный импульс для создания вибрации в автомобиле.
На самом деле, колеса и шины никогда не бывают одинаковыми по весу. Отверстие под шток клапана колеса обычно уменьшает вес с этой стороны колеса. Шины также будут иметь небольшую несбалансированность по весу, будь то точка соединения слоев колпачка или небольшое отклонение от идеально круглой формы. На высоких скоростях даже крошечный дисбаланс веса может стать большим дисбалансом внешней силы, что может привести к вращению колеса и шины в сборе в тяжелом и неравномерном движении.Обычно это также превращается в вибрацию в автомобиле, которая может вызвать неравномерный и разрушительный износ шин.
Поддержание надлежащего баланса колес — критически важный элемент в продлении срока службы шины. Кроме того, правильная балансировка колес гарантирует плавность хода вашего автомобиля и отсутствие вибраций.
Закон штата Калифорния о защите прав потребителей (CCPA) Запросы
Используйте эту форму, если вы являетесь жителем Калифорнии и запрашиваете дополнительную информацию, касающуюся ваших прав в соответствии с Законом Калифорнии о конфиденциальности потребителей («CCPA»).
Пожалуйста, предоставьте нам следующую информацию, и мы свяжемся с вами. Кроме того, вы можете связаться с нами напрямую по телефону или электронной почте. Бесплатный звонок: (831) 290-6514
Разъяснение терминологии колес
Как узнать, нужно ли балансировать мои шины?
Drive и его партнеры могут получать комиссию, если вы покупаете продукт по одной из наших ссылок. Подробнее.
Эта вибрация, которую вы чувствуете при движении по шоссе, может быть несколькими причинами, но если вам повезет, она не будет связана с тем бордюром, которое вы врезались в Starbucks сегодня утром. Ваш автомобиль может быть смещен, у вас может быть поврежденная шина или, что более вероятно, ваши шины могут быть разбалансированы. Когда это происходит, грузики, прикрепленные к шине, либо не выполняют свою работу должным образом, либо оказываются в неправильном месте.
Хотя это не самая серьезная проблема, с которой вы можете столкнуться, езда на несбалансированных шинах может вызвать множество других проблем, не в последнюю очередь из которых ускоренный износ резины.Большинство людей направляются в шинный магазин, когда замечают вибрации, которые могут исходить от несбалансированной шины, но в этом нет необходимости, если у вас есть подходящие инструменты.
В этом посте информационные редакторы The Drive рассказывают о балансировке шин и рассказывают, почему это важно. Мы также узнаем, как вы можете выполнять домашнюю работу и почему вам это может понадобиться. Суть в том, что независимо от того, как вы относитесь к балансировке шин, лучше не игнорировать эту проблему. Ваши шины и, в конечном итоге, ваши пассажиры будут благодарить вас за то, что вы удерживаете их в равновесии и обеспечиваете комфортный поворот.
Что такое балансировка шин?
Для балансировки шин требуется хорошая пара обуви, приглушенная толпа и пылающее кольцо. Нам было бы весело наблюдать за тем, как вы пытаетесь оторваться, но на самом деле балансировка шин не в этом. У вашей машины есть колеса, очевидно, с шинами. Для того, чтобы вращаться и двигаться плавно, шины должны иметь вес автомобиля, равномерно распределяемый по их окружности. Шиномонтажная мастерская делает это в несколько этапов:
Установленные шина и колесо помещаются на шиномонтажный станок.
Станок раскручивает колесо и измеряет колебания, возникающие при вращении. Это дает специалисту по шинам показания, которые показывают, равномерно ли распределяется вес, а если нет, то какой вес добавить и где.
В большинстве случаев специалист по шинам может просто добавить или отрегулировать существующий вес, чтобы выровнять дисбаланс шины, но в некоторых случаях шину необходимо снять и снова установить. Иногда на шине и колесе видны тяжелые пятна в одном и том же месте, поэтому шину приходится переставлять в другое положение, чтобы сбалансировать распределение веса.
Что приводит к выходу шин из равновесия?
Вы. Это твоя ошибка. Это короткий ответ, но более длинный ответ заключается в том, что нормальное движение по неровной дороге может привести к выходу шины из равновесия. В других случаях шины изнашиваются неравномерно, что не может иметь никакого отношения к поведению водителя. Иногда производители шин допускают, чтобы небольшие дефекты не проходили контроль качества, что может привести к их большему износу в одном месте над другим, а иногда они просто не устанавливаются должным образом.Даже небольшая разница в весе может существенно повлиять на ощущения от машины, катящейся по дороге.
Как узнать, когда пора балансировать?
В отличие от некоторых проблем с обслуживанием транспортных средств, которые обычно скрываются до тех пор, пока проблема не выйдет из-под контроля, вы будете знать, когда пришло время провести балансировку шин или, по крайней мере, проверить. Дисбаланс в шине приведет к ее раскачиванию и вибрации, когда колесо начнет вращаться. Чем быстрее вращение, тем сильнее вибрация. Если вы чувствуете вибрацию в рулевом колесе, это, вероятно, связано с проблемой с балансировкой передних шин, но вибрация, которую можно почувствовать в вашем сиденье, скорее всего, указывает на проблему с балансировкой задних колес.
Могу ли я уравновесить шины дома?
Можно, но для этого потребуется какое-то оборудование, которого у вас, вероятно, нет только дома. Вам понадобится устройство для балансировки шин, которое подскажет, где разместить на шине грузы, чтобы сбалансировать тяжелые участки.
Есть способ сбалансировать шины, не снимая их с автомобиля, но это требует утомительного процесса проб и ошибок, который подойдет далеко не всем. По этой причине мы будем рекомендовать балансировочное устройство.
Что нужно знать о балансировке шин
Шины
Когда мы говорим о шинах, мы имеем в виду именно резину, а не сами колеса. Мы отметим, когда задействовано колесо, но в большинстве тем в этом посте мы говорим только о шинах.
Баланс
Баланс означает способность шин плавно вращаться без нежелательных вибраций. Из-за различий в технологиях производства и повреждений, которые могут возникнуть во время транспортировки и погрузочно-разгрузочных работ, шина может быть тяжелее с той или иной стороны по разным причинам.
Вращение
Когда мы говорим о вращении, мы говорим конкретно о вращении шины и колеса. Это отличается от числа оборотов вашего двигателя в минуту (об / мин), который представляет собой механическую систему, не имеющую отношения к шинам.
Гири
Гири — это именно то, на что они похожи. Они размещаются в определенных местах вокруг шины, чтобы гарантировать, что любые тяжелые места имеют противовес, чтобы выровнять их с другой стороны шины.
Часто задаваемые вопросы о балансировке шин
У вас есть вопросы, У Drive есть ответы!
Q.Могу ли я игнорировать несбалансированную шину?
A. Ну, можно, но при этом вам будет неудобно или безопасно. Несбалансированная шина может сделать поездку на вашем автомобиле невыносимой из-за вибраций, а также может повлиять на безопасность, если она отвлекает ваше внимание от дороги.
В. Итак, сколько стоит балансировка шины?
A. Многие магазины шин предлагают бесплатную балансировку как часть приобретаемых у них пакетов шин, но в других случаях за нее придется платить.В среднем планируйте потратить от 15 до 75 долларов, в зависимости от вашего автомобиля, шин и магазина.
В. Хорошо, тогда как часто мне нужны балансирные шины?
A. Вы должны проверять свои шины при каждой замене масла, которая обычно происходит каждые 5000-15000 миль, чтобы не допустить возникновения проблемы, которая может вызвать проблемы с износом или проблемы с безопасностью вашего автомобиля. Это не значит, что вам каждый раз понадобится баланс. Это просто означает, что вы должны быть в курсе того, что происходит с вашими шинами.
В. Отличается ли балансировка шин от центровки?
A. Да. Выравнивание относится к колесам вашего автомобиля и их расположению по отношению к дороге. Работы по выравниванию обычно регулируют такие вещи, как развал, то есть угол, под которым колеса садятся на автомобиль.
В. Может ли баланс шин повлиять на экономию топлива?
A. Несбалансированные шины могут вызвать ненадлежащий износ и привести к тому, что двигателю потребуется выработать больше мощности, чтобы они вращались с постоянной скоростью.
Давайте поговорим, прокомментируем ниже, чтобы поговорить с
редакторами Drive!
Мы здесь, чтобы быть экспертами во всем, что связано с практическими рекомендациями. Используйте нас, хвалите нас, кричите на нас. Прокомментируйте ниже, и давайте поговорим! Вы также можете написать нам в Twitter или Instagram, вот наши профили.
Балансировка колес vs.схождение колес: краткое руководство
Когда дело доходит до ухода за автомобильными шинами, вам необходимо выполнять плановое техническое обслуживание, иначе вы собираетесь быстро израсходовать шины, придется платить за их более частую замену и, вероятно, иметь дело с прорывами и проколами во время поездки . Есть три основных услуги, которые вы должны запланировать для своих автомобильных шин в нашем сервисном центре Orlando Toyota: ротация шин, балансировка колес и регулировка углов установки колес. Мы знаем, что почти все знают, что такое вращение шин, но знакомы ли вы с различиями между балансировкой колес и регулировкой углов установки колес?
В чем основное различие между регулировкой углов установки колес и балансировкой колес?
Хотя выравнивание и балансировка необходимы для поддержания ваших шин в хорошем состоянии и хорошей работы вашего автомобиля, это два очень разных процесса.Ознакомьтесь с этим кратким руководством по обоим из них от наших специалистов по обслуживанию Toyota of Orlando.
Центры углов установки колес
Колеса вашего автомобиля выровнены на заводе под определенными углами, чтобы все четыре были параллельны друг другу, а также чтобы все четыре стояли идеально перпендикулярно земле. Это обеспечивает равномерный износ и отличные характеристики. Однако со временем ваши колеса могут смещаться из-за износа, наезда на бордюры и автомобильных аварий.Если вы не запланируете регулировку углов установки колес для повторной корректировки углов, вы столкнетесь с проблемами времени вождения, в том числе:
Ваш автомобиль съезжает с дороги
Неравномерный износ шин, поэтому вам придется менять их чаще
Ваш автомобиль тянет в сторону, даже когда рулевое колесо выпрямлено
Очевидно, что уход за автомобильными шинами является важным элементом, который нужно добавить в свой контрольный список. Вы должны планировать регулировку углов установки колес примерно каждые два года, если только вы не попадете в аварию или не получите новые шины.
Балансировка колес
Балансировка колес отличается от регулировки углов установки колес — этот уход за автомобильными шинами имеет дело не с углами, а с весом. Во время движения автомобильные шины могут изнашиваться, что может привести к дефектам или пятнам, а также к повреждению обода в случае аварии или столкновения. Это делает одну часть шины тяжелее других, что, в свою очередь, приводит к раскачиванию и подпрыгиванию. Вы сможете почувствовать это в салоне автомобиля как вибрацию, а также заметить такие знаки, как:
Вибрация в рулевом колесе
Фигурные или зубчатые узоры на круге
Когда вы планируете балансировку колес в сервисном центре Toyota в Орландо, наши специалисты будут применять грузы, чтобы уравновесить «тяжелые пятна» на шинах вашего автомобиля, чтобы обеспечить равномерный износ и плавность хода.Ваши колеса следует балансировать каждый раз, когда вы ремонтируете или меняете шины, чтобы получить максимальную выгоду.
Запланируйте уход за автомобильными шинами в Toyota of Orlando
Если вам нужна балансировка, выравнивание или и то, и другое, мы поможем вам! Назначьте встречу в нашем сервисном центре Orlando Toyota сегодня, чтобы довести производительность вашего автомобиля до номинала. Мы открыты семь дней в неделю по телефону (407) 298-0001, и вы можете зайти, чтобы поговорить с одним из наших специалистов по адресу 3575 Vineland Road, недалеко от шоссе I-4 напротив торгового центра Millenia Mall.
Балансировка шин: что нужно знать
Одна маленькая вещь, которая может вызвать преждевременный износ шин и подвески, — это несбалансированная шина. Хотя процедура балансировки шин может показаться незначительной, это очень важная процедура. Если шины не проходят регулярную балансировку, управляемость и даже безопасность вашего автомобиля могут ухудшиться. Узнайте больше о балансировке шин, ее функциях и признаках необходимости повторной балансировки шин.
Зачем нужна балансировка шин?
Шины и диски поступают от производителя не в идеальном состоянии и готовы к работе.Несмотря на то, что они могут казаться однородными на первый взгляд, шины и колеса часто имеют различный вес по всей своей конструкции. Нормальный износ также может изменить баланс вашего колеса и шины. Когда ваши колеса не сбалансированы, ваши шины не будут вращаться плавно. Это влияет на управляемость вашего автомобиля.
Как выполняется балансировка?
Шины балансируются после установки на колесо. Современные шиномонтажные мастерские используют компьютеризированную машину для балансировки вращения. Шина едет по машине и крутится на большой скорости.Компьютер считывает, где шина разбалансирована, и указывает, где на колесе следует разместить грузы. Техник помещает на обод тонкие металлические детали, чтобы уравновесить тяжелые пятна. Затем техник снова вращает колесо, чтобы убедиться, что оно имеет надлежащий баланс.
Каковы признаки дисбаланса шин?
Достаточно небольшого дисбаланса, чтобы нарушить управляемость и управляемость вашей машины. Откройте для себя некоторые признаки того, что вам нужно сбалансировать шины.
Странные колебания
Внезапное появление вибрации является признаком того, что ваши шины не сбалансированы. Эти вибрации заметны на вашем рулевом колесе при достижении умеренных скоростей. Вибрации усиливаются по мере того, как вы едете быстрее, а затем сглаживаются, когда вы набираете скорость.
Необычный износ протектора
Плохо сбалансированная шина со временем вызывает появление необычных, неоднородных плоских участков на протекторе шины. Эти пятна износа часто не имеют постоянного размера или формы.Если вы слишком долго игнорируете проблему, ваши шины могут потерять протектор. Неравномерный износ также через некоторое время влияет на прочность и целостность боковин и может привести к выбросу.
Изношенные детали подвески
Вибрация от несбалансированных шин распространяется по остальным частям колеса и подвески. В конечном итоге это приводит к преждевременному износу и повреждению ступичных подшипников и амортизаторов. Это также влияет на отзывчивость и управляемость вашего автомобиля.Со временем вы можете заметить больший люфт (или люфт) в рулевом управлении или странные шумы из подшипников.
Изменения пробега на бензине
Вибрация и необычно изношенные шины могут привести к сокращению расхода топлива, особенно при увеличении скорости. Однако также проверяйте шины на предмет недостаточного давления, поскольку это также является частой причиной повышенного расхода топлива.
Когда следует балансировать шины?
Новые шины всегда балансируются, когда они впервые попадают на ободья.Когда вы регулярно меняете шины, механик часто балансирует их в процессе. Ваши колеса также должны подвергаться повторной балансировке всякий раз, когда вы получаете работу с подвеской.
Другой раз, чтобы проверить балансировку шины, — это если вы подозреваете, что сбили груз, например, если вы ударились о выбоину или бордюр. Проверьте свои шины и колеса, если вы заметили внезапный и необычный шум и вибрацию.
Когда ваши шины неуравновешены, это заметно влияет на управляемость вашего автомобиля и износ шин.Регулярно балансируйте шины, чтобы они оставались в хорошей форме как можно дольше. Шины и сервисные центры Evans проведут балансировку ваших новых шин, но при необходимости также проведут повторную балансировку шин. Если вам нужны новые шины или вам нужен другой ремонт колес и подвески, поговорите с нашими специалистами и зайдите для обслуживания.
Руководство по балансировочному станку
| Дерек Уивер Ко.
Что вызывает вибрацию автомобиля?
Дисбаланс шин и колес — одна из наиболее вероятных причин вибрации автомобиля.Другие причины могут быть связаны с проблемами трансмиссии и / или погнутыми компонентами. Дисбаланс шин и колес может привести к неравномерному износу шин, потере тяги и преждевременному износу деталей подвески и рулевого управления.
Передние шины вызывают более заметные симптомы, чем задние, когда они не сбалансированы из-за перемещения через компоненты подвески и рулевого управления и обратной связи на рулевом колесе. Вибрации от заднего дисбаланса могут быть не столь очевидными, но все же приведут к износу шин.
Дисбаланс шины возникает, когда вес материалов шины неравномерно распределяется по всей шине, в результате чего шина оказывается тяжелее с одной стороны, чем с другой. Дисбаланс может быть вызван производственными проблемами или износом шин. Новые шины будут иметь незначительный дисбаланс, который можно исправить, добавив вес колеса в указанное место, чтобы нейтрализовать эффект дисбаланса. Если для балансировки шины требуется чрезмерный вес, это может быть признаком неисправности шины или неправильной посадки шины на обод колеса.
Можно уравновесить некруглую шину и колесо в сборе и при этом по-прежнему иметь вибрацию из-за скачкообразного движения колеса (также называемого толканием колеса). Следует отметить, что биение менее 0,030 дюйма обычно не вызывает заметной вибрации. Однако для замены шины или колеса рекомендуется биение более 0,125 дюйма. Хотя теоретически можно сбалансировать квадратную шину и колесо, это не означает, что они будут катиться плавно.
Типы колесных весов
Грузики
Clip-On забиваются на место, а грузики Tape-On используют липкую двустороннюю ленту.
Весы с зажимными колесами
Для исправления дисбаланса необходимо прикрепить колесные грузы к ободу. Колесные грузы прикрепляются к ободу с помощью молотка для колесных грузов. Существует несколько типов накладных грузов с шагом 1/4 унции. Доступны различные типы зажимов для различных типов колес и колесных колпаков. Алюминиевые колеса с фланцем для крепления груза могут потребовать зажима с покрытием или сплава, чтобы они не разъедали колесо.
Различные типы грузов с защелкой подходят для самых разных областей применения.
Вес колес с лентой
Грузики могут также использоваться для алюминиевых колес. Утяжелители доступны в виде полос, которые можно обрезать до нужной длины. Эти грузы прикрепляются с помощью двусторонней липкой ленты после очистки области колеса. Ленточные грузы можно скрыть внутри колеса, чтобы они не были заметны снаружи для лучшего внешнего вида.Также доступны хромированные утяжелители.
Алюминиевые, окрашенные и легкосплавные диски легко поцарапать, и стоит отметить, что для защиты инструментов от повреждений следует использовать пластиковые протекторы.
Ленточные грузы на колесе Camaro (вверху)
Использование грузиков с ведущим колесом началось в 1930-х годах. Свинцовые гири были запрещены Европейской комиссией в 2005 году, и теперь они также запрещены в некоторых Соединенных Штатах. Альтернативные грузы изготавливаются из стали, цинка или цинкового сплава под названием ZAMA, в котором сочетаются цинк, алюминий и медь.Также доступны бессвинцовые грузики.
БАЛАНСИРОВКА КОЛЕСА
Статический балансир колес
Существует два типа балансировки колес: статическая и динамическая. Статический означает, что объект неподвижен. Поэтому перед компьютерной балансировкой статическая балансировка выполнялась при неподвижном колесе. Если колесо со статическим дисбалансом было установлено на шпинделе с тяжелым участком наверху, тяжелое пятно само повернулось бы в самое нижнее возможное положение.Если бы колесо было статически сбалансировано, оно не имело бы тенденции вращаться само по себе.
Сила направлена от центра колеса при вращении
Статический дисбаланс подвергает колесо вертикальным ударам (вверх и вниз), которые усиливаются с увеличением скорости. Эти удары возникают, когда на одном конце протектора шины имеется тяжелое пятно. Небольшой дисбаланс, когда колесо находится в покое, может привести к большой ударной силе, когда колесо вращается на скоростях шоссе.Например, если 15-дюймовое колесо выходит из равновесия на 1 унцию в состоянии покоя, на скорости 60 миль в час сила удара будет 4,6 фунта.
Статический дисбаланс вызывает износ шины, что приводит к появлению трещин, в результате чего на протекторе шины образуются гребни или зубчатые формы. Эти вибрации также приводят к преждевременному износу механических частей. В крайних случаях может произойти прыгающая шина, которая действительно может ускользнуть от дороги, особенно в сочетании с плохим амортизатором (известным как прыгание колеса или шины, а также удары колеса).
Куполообразный износ шин (см. Выше)
СТАТИЧЕСКОЕ ТРЕНИЕ
Часть шины, контактирующая с дорогой, действительно движется со скоростью 0 миль в час. Это называется статическим трением. При ударе колеса, когда шина возвращается на дорогу, небольшое количество ее резины стирается. Это потому, что шина двигалась с той же скоростью, что и транспортное средство, когда оно съезжало с дороги. Эта чистка происходит по всей шине, что составляет чашеобразный износ по всей окружности поверхности протектора.
СТАТИЧЕСКАЯ БАЛАНСИРОВКА
Раньше шины с узким диагональным слоем статически балансировались на балансировочном устройстве. Современные компьютерные балансировочные станки для колес способны измерять статический дисбаланс вращающейся шины и колеса, название осталось от того, когда дисбаланс измерялся с неподвижным колесом на балансировочном станке с пузырьками. Статическая балансировка, также называемая балансировкой в одной плоскости, выполняется в одной плоскости, где компенсирующий вес добавляется с противоположной стороны колеса.Современные балансировщики колес могут определять степень дисбаланса веса и место размещения груза точно напротив тяжелого места на шине. Статическая балансировка — это один из нескольких режимов балансировки современных компьютерных балансировщиков колес. Несмотря на то, что существуют лучшие способы балансировки алюминиевых колес, эту опцию можно использовать при выборе скрытия грузов на внутренней стороне колеса. При статической балансировке алюминиевого колеса часто используют наклеиваемые ленты на внутреннюю часть колеса в центральной плоскости.
Динамическая балансировка колес
Динамический баланс означает баланс в движении. Его также называют двухплоскостным балансом, потому что он измеряет боковую (поперечную) силу, а также верхнюю и нижнюю (осевую или радиальную) силу. Боковые силы заметны, когда рулевое колесо движется вперед и назад. Балансировочный станок с компьютером вращает колесо и определяет местоположение и величину вибрации. Компьютер разделяет шину на две половины и измеряет поперечные и радиальные силы с каждой стороны от центра шины.К каждой стороне колеса добавлены грузы, чтобы исправить дисбаланс. Таким образом, шина с динамической балансировкой также балансируется статически. Динамическая балансировка может выполняться с помощью компьютерного балансировочного станка или с помощью балансировочного станка, установленного на автомобиле.
ДИНАМИЧЕСКИЙ ДИСБАЛАНС
Когда шина имеет больший вес внутри или снаружи протектора, она имеет динамический дисбаланс. Динамический дисбаланс заметен только тогда, когда шина и колесо вращаются. Шина будет иметь тенденцию качаться из стороны в сторону (влево и вправо), что также приводит к более быстрому износу шины.Когда шина вращается, тяжелое место будет стремиться к центральной линии шины. Вот почему шина колеблется из стороны в сторону. Когда впереди тяжелое место, колесо толкает в сторону. После того, как шина повернется на половину оборота, тяжелое место заставит колесо попытаться повернуться в противоположном направлении. Однако большинство шин имеют дисбалансы по обеим сторонам шины, что требует размещения противовесов с обеих сторон колеса.
Действие динамического дисбаланса
Колесо может находиться в статическом балансе, но не сбалансировано динамически.Если шина была статически сбалансирована путем размещения всего противовеса на одной стороне колеса, этот вес создает динамический дисбаланс, когда колесо вращается, вызывая колебание из стороны в сторону. Правильный способ статической балансировки колеса — разделить вес пополам и разместить одинаковые веса с обеих сторон колеса. Некоторые производители шин рекомендуют эту процедуру, если их вес превышает 20 граммов или 0,71 унции. Маловероятно, чтобы шина имела статический дисбаланс, а также не имела динамического дисбаланса.Когда колесо и шина динамически сбалансированы, оба типа дисбаланса могут быть устранены.
КОМПЬЮТЕРНЫЕ БАЛАНСИРЫ
Компьютерные балансировщики колес
популярны, точны и просты в использовании для балансировки шин как в статическом, так и в динамическом режимах. Компьютерная балансировка обычно выполняется после ремонта шины или после установки новой шины на колесо. Колесо крепится к горизонтальному резьбовому валу с помощью переходников, поставляемых с машиной.
Компьютерная балансировочная машина Weaver, модель W-977 (вверху)
Как установить колесо на балансир
Другая причина дисбаланса может быть вызвана неправильной установкой колеса на балансировочном станке.Согласно FMC Corporation, 36-фунтовая шина и колесо в сборе, которое смещено от центра всего на 0,006 дюйма, приведет к ошибке дисбаланса в 1/2 унции. Эффект этого типа дисбаланса можно продемонстрировать, сначала сбалансировав шину и колесо в сборе. на балансировочном станке, затем ослабьте колесо настолько, чтобы поместить стандартную визитную карточку между фланцевой пластиной балансировочного станка и колесом.Затяните и повторно затяните узел с установленной картой и обратите внимание на разницу в показаниях веса, измеренных балансиром.Лучшим способом крепления колеса на балансировочном станке является способ, указанный производителем. Этот метод будет дублировать метод центрирования колеса на транспортном средстве.
Есть два способа центрирования колес на транспортном средстве:
Установка с центром в ступице — это когда отверстие в центре колеса позволяет установить колесо на ступицу или ось колеса.
Крепление по центру проушины — это когда гайка центрирует колесо.
Чтобы определить, центрировано ли колесо по ступице, проверьте, плотно ли прилегает колесо к ступице при снятых зажимных гайках.Если вы можете перемещать колесо вверх и вниз или из стороны в сторону, тогда колесо ориентировано на выступ. Когда колесо центрируется по проушине, для центрирования колеса используется конус на проушинах.
Как установить ступичные колеса
Всегда проверяйте, чтобы адаптеры и колесо были чистыми и неповрежденными. Перед балансировкой удалите с шины и колеса все камни и мусор. Используйте центрирующий конус для установки колеса со ступицей. На стальные штампованные колеса устанавливают конус с задней или внутренней стороны колеса.Это потому, что колесо изначально штамповалось с задней или внутренней стороны колеса. Рекомендуемое расположение адаптеров, установленных на валу:
1-я — пружина (некоторые современные балансиры имеют встроенную пружину).
2nd- Конус, который подходит к ступице колеса.
3-й — Шина и колесо в сборе.
4-й — Стопорная чашка или барабан (на чашке обычно используется защитное кольцо для защиты отделки колеса).
5-я барашковая гайка (в большинстве современных балансировщиков используется быстросъемная гайка, которая может обходить резьбу вала для более быстрой затяжки).
Установка по центру ступицы
Когда колесо затягивается на валу, пружина будет удерживать давление на конус для правильного центрирования. Обычно шину вращают в противоположном направлении (против часовой стрелки, если смотреть со стороны конца вала), чтобы способствовать лучшему центрированию. Стопорная чашка позволяет выступать маленькому концу конуса через ступицу колеса, обеспечивая при этом средство, с помощью которого барашковая гайка затягивает узел на валу. Гайку-барашек следует затягивать только вручную.Это общепринятая практика, когда вес узла покачивается против часовой стрелки обеими руками на барашковой гайке, а затем затягивается по часовой стрелке. Плотная посадка — это все, что требуется для предотвращения вращения или скольжения узла на валу во время циклов отжима. Состояние конусов имеет решающее значение для точной балансировки. Новый конус имеет допуск на валу 0,001 дюйма. Изношенные или плохо подогнанные конусы и валы следует заменять для достижения наилучших результатов. Доступны раздвижные цанги для более точного центрирования.Эти цанги расширяются при затягивании, устраняя весь зазор между цанговым патроном и валом.
Как установить колеса с центрирующим выступом
Для установки колес с центрирующими выступами используйте переходную пластину для центрирования выступов. Универсальные переходные пластины имеют несколько поворотных рычагов с проушинами, которые крепятся в разных местах в зависимости от количества отверстий под проушины в колесе. Адаптерных рычагов всего пять. С шестью опорными колесами используйте три рычага. С восемью опорными колесами используйте 4 рычага.После того, как рычаги установлены и затянуты на адаптере, адаптер удерживается на монтажном фланце балансировочного станка с помощью винтов. Специальные гайки-проушины удерживают колесо на переходной пластине. Не перетягивайте их.
Универсальный адаптер с центрирующим выступом W-B-W-1000000 (вверху)
Крепление по центру проушины (вверху)
История болезни
— Мужчина купил подержанный Suburban с алюминиевыми дисками и шинами увеличенного размера.Шины оказались в хорошем состоянии, изношено менее половины протектора. К сожалению, они были неправильно сбалансированы с помощью переходников в центральном отверстии ступицы вместо переходника с выступом. Шины изнашивались неравномерно, и рисунок протектора имел чашеобразную форму. Теперь они были слишком разбалансированы, и их нужно было заменить.
Как запрограммировать балансировщик колес
После того, как колесо установлено на балансировочном станке, в балансировочном станке запрограммированы три параметра:
1) Ширина (Bre на некоторых балансирах) обода, измеренная штангенциркулем.
2) Расстояние между ободом и фланцем опорной пластины, измеренное путем сдвигания шкалы расстояний до кромки обода или кромки борта.
3) Диаметр колеса (например, 15 дюймов, 16 дюймов, 16,5 дюймов).
Колесо вращается на несколько секунд, а затем останавливается. Затем балансировщик покажет результаты, отображая показания на экране. На индикаторе отображаются значения веса и места их установки на колесе. После установки грузов балансир снова вращается, чтобы проверить точность балансировки.Значение «ноль» или «ОК» на обеих сторонах колеса означает, что колесо сбалансировано и готово к установке обратно на автомобиль.
Балансир Дисплей, показывающий количество грузов, расположение грузов и режим динамической балансировки. Также показаны настройки расстояния, ширины и диаметра колеса (показана модель Weaver W-977). (вверху)
В косметических целях и во внешнем виде наклеиваемые гири часто используются в различных режимах, доступных на балансирном станке.Эти режимы (режимы ALU на некоторых машинах) позволяют использовать различные варианты размещения грузов и скрытые методы взвешивания, чтобы обеспечить наилучший внешний вид при сохранении качества динамической балансировки. Компьютер балансировочного станка производит расчеты для определения правильного значения веса и местоположения.
Грузики на внутренней стороне колеса (сверху)
При балансировке алюминиевых колес с приклеенными грузами используйте изоленту, чтобы временно прикрепить грузы к колесу во время начальной балансировки.Установите внешний противовес как можно ближе к внешней стороне. Внутренний вес помещается на внутреннюю кромку колеса. Всегда проверяйте наличие достаточного зазора между колесными грузами и тормозным суппортом.
ПОВТОРЯЕМОСТЬ — ОЧЕНЬ ВАЖНО!
Квест на ПОВТОРНЫЙ балансир можно получить, если вы можете скопировать маунта. Есть 2 условия, которые нужно проверить, которые помогут вам понять (не имеет значения, какую марку машины вы используете).Точность балансира Weaver®Wheel Balancer составляет 1 грамм или 0,10 унции.
1) Тестирование балансира — это легко сделать. Посмотрев наше калибровочное видео, вы увидите, как балансир проверяется в конце калибровки с помощью тестового груза для проверки точности балансиров. Это говорит нам, правильно ли показывает балансировщик или возникла проблема. Когда балансир откалиброван и считывает точные показания, тестовый груз определит способность балансира считывать правильное количество и местоположение груза.Таким же способом можно проверить балансир любой марки.
2) Тестирование физического монтажного устройства (это может быть конус, цанги, монтажные пластины и т. Д.) — После того, как вы завершите тест точности после калибровки и балансир показывает правильные значения, все, что вы изменяете в отношении монтажа (физически), будет влияют на показания с предыдущего крепления. Мы уже подтвердили, что балансир показывает точные показания, поэтому, если вы ослабите и поверните колесо, единственное изменение будет физическим.При использовании конусов вы поймете, что существует допуск около 2–3 тысяч дюймов, позволяющий конусу скользить по резьбе вала (со временем это ухудшается по мере износа резьбы). Объедините это с допуском в конкретной ступице колеса, и это гарантия того, что он изменит монтажное положение колеса при повороте или повторной установке, что приведет к изменению баланса (балансировщики колес очень точны и будут чувствовать это минимальное изменение). Если это повторяется, вам просто повезло, что вы попали в одну и ту же позицию.Чем точнее вы используете монтажное устройство, скажем, универсальный адаптер проушины или цангу, специфичную для марки колеса, тогда вы можете начать искать лучшую повторяемость (на любой машине), потому что у вас будет больше возможностей воспроизвести ту же установленную физическую должность. Это физическое изменение не имеет ничего общего с возможностями балансира, а напрямую связано с вашей способностью воспроизводить то же положение наездника.
При установке цель состоит в том, чтобы воспроизвести ту же установку, что и на транспортном средстве.Идеально сбалансированная шина и колесо в сборе могут быть неправильно установлены на транспортном средстве и привести к дисбалансу. Подвеска — самый важный компонент для достижения хорошего баланса на дороге. Чтобы продемонстрировать изменение, которое может произойти в результате монтажных изменений, просто балансируйте колесо на машине, только ослабьте узел (не вращая и не снимая колесо) и поместите типичную визитную карточку (визитная карточка без покрытия составляет около 0,013 дюйма) между опорной пластиной и колесом. Затяните и снова сделайте вращение, чтобы увидеть изменение веса, производимое одной только картой.Это глубоко!
Если ваша единственная забота — повторяемость, вам нужно будет приобрести универсальный адаптер для проушин или некоторые комплекты монтажных пластин для цанговых патронов производства Haweka, чтобы повысить точность монтажа. Помните, что даже при такой точности крайне важно, чтобы узел был правильно установлен на транспортном средстве для достижения наилучшего результата. Монтажные вопросы!
Town Fair Tire — Компьютеризированная балансировка колес
Когда дело касается вашего автомобиля, всегда все в порядке; пока этого не произойдет.Любое количество вещей может пойти не так в любое время, и когда вы имеете дело с чем-то столь же дорогим, как автомобиль, нет ничего более неприятного, чем знать, что вы могли сделать что-то, чтобы предотвратить проблему.
Признаки и результаты неуравновешенного колеса
Балансировка колес — это одна из мер, которую всегда следует предпринимать для увеличения срока службы шин и подвески. Когда колесо вращается, асимметрия массы может привести к тому, что шина будет подпрыгивать или раскачиваться, а не плавно катиться по дороге.Вы можете заметить, что ваше рулевое колесо вибрирует или тянет, и ваш автомобиль может дергаться, особенно на высоких скоростях. Если вы чувствуете вибрацию в рулевом колесе, то, вероятно, ваши передние колеса неуравновешены, а если вы чувствуете вибрацию в сиденье, вероятно, что ваши задние колеса разбалансированы.
Несбалансированные колеса отрицательно влияют на скорость вашего автомобиля, управляемость, расход топлива и износ шин. Это может вызвать всевозможные финансовые проблемы. Например, если у вашего автомобиля передний привод, и вы вращаете колеса, неуравновешенное заднее колесо, которое теперь находится впереди, заставит ваш автомобиль трястись.Урок здесь — сделать работу правильно с первого раза.
Если вы планируете балансировку колес или вращение шин, обратите внимание на наши специальные предложения по регулировке углов установки колес.

 До 100 км он разгонялся всего за 12,8 с, развивал скорость до 180 км/ч, а весил немногим больше тонны. По тем временам это были грандиозные показатели. Лицензию на производство роторных моторов стали сразу же приобретать одна автомобильная компания за другой.
До 100 км он разгонялся всего за 12,8 с, развивал скорость до 180 км/ч, а весил немногим больше тонны. По тем временам это были грандиозные показатели. Лицензию на производство роторных моторов стали сразу же приобретать одна автомобильная компания за другой.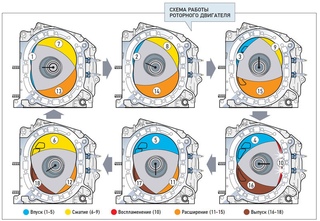 Новым витком в развитии РПД стало применение водорода в качестве топлива.
Новым витком в развитии РПД стало применение водорода в качестве топлива.

 Это является причиной быстрого разгона автомобилей с РПД.
Это является причиной быстрого разгона автомобилей с РПД.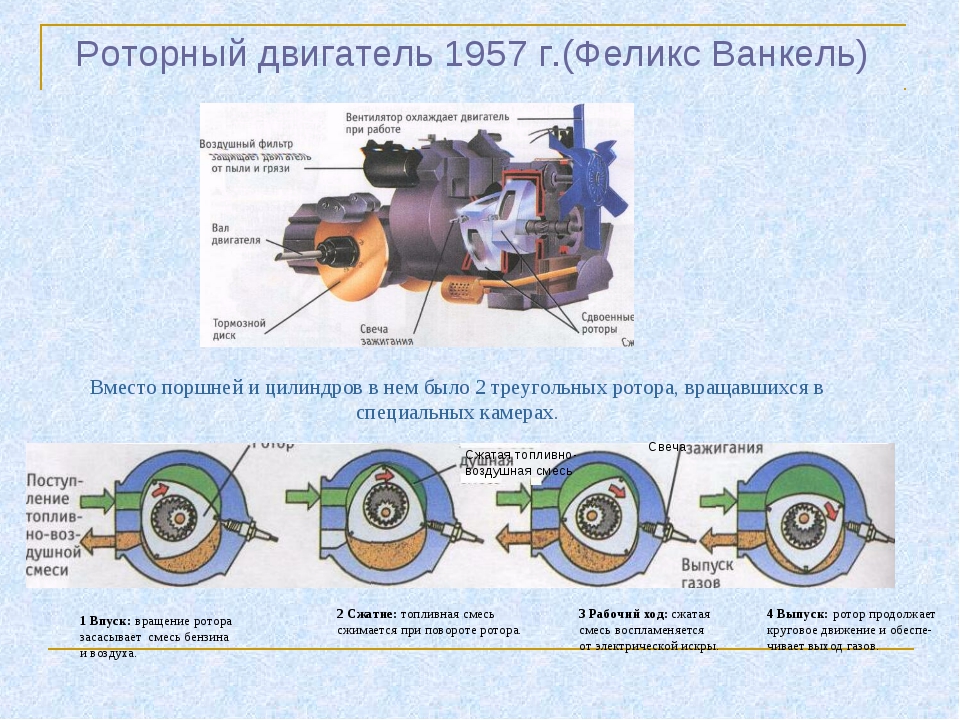
 В процессе работы стенки статора неравномерно разогреваются и расширяются. В результате возможны утечки газа. Особенно нагревается та часть, в которой происходит сгорание. Чтобы справить с этой проблемой, различные части делают из разных сплавов. Это в свою очередь усложняет и удорожает процесс производства двигателей.
В процессе работы стенки статора неравномерно разогреваются и расширяются. В результате возможны утечки газа. Особенно нагревается та часть, в которой происходит сгорание. Чтобы справить с этой проблемой, различные части делают из разных сплавов. Это в свою очередь усложняет и удорожает процесс производства двигателей. км. Для сравнения ресурс традиционного двигателя внутреннего сгорания в 2, а то и в 3 раза больше. Обслуживание роторно-поршневых двигателей требует большей ответственности, поэтому они привлекают внимание преимущественно профессионалов. Частично инженерам удалось устранить недостатки автомобилей с РПД, но некоторые из них все же остались.
км. Для сравнения ресурс традиционного двигателя внутреннего сгорания в 2, а то и в 3 раза больше. Обслуживание роторно-поршневых двигателей требует большей ответственности, поэтому они привлекают внимание преимущественно профессионалов. Частично инженерам удалось устранить недостатки автомобилей с РПД, но некоторые из них все же остались. В разной комплектации автомобиль продавался по всему миру. Самые мощные модели (250 л. с., 8,5 тыс. оборотов в минуту) продавали в Северной Америке и Японии. В 2007 годы в Токио на автосалоне представили концепт кар с мотором Renesis II мощность 300 л. с.
В разной комплектации автомобиль продавался по всему миру. Самые мощные модели (250 л. с., 8,5 тыс. оборотов в минуту) продавали в Северной Америке и Японии. В 2007 годы в Токио на автосалоне представили концепт кар с мотором Renesis II мощность 300 л. с. Соответственно, даже при небольшом рабочем объеме «отдача» от такого мотора достаточно высокая.
Соответственно, даже при небольшом рабочем объеме «отдача» от такого мотора достаточно высокая. 
 Сам эксцентриковый вал проходит через все корпуса и стационарные шестерни. Вращение ротора, точнее, его вращательное движение происходит так, что на 1 его оборот приходится 3 оборота эксцентрикового вала.
Сам эксцентриковый вал проходит через все корпуса и стационарные шестерни. Вращение ротора, точнее, его вращательное движение происходит так, что на 1 его оборот приходится 3 оборота эксцентрикового вала. Когда полость достигает максимального объема, ротор перекроет впускные окна, после чего начнется такт сжатия (полость начнет уменьшаться).
Когда полость достигает максимального объема, ротор перекроет впускные окна, после чего начнется такт сжатия (полость начнет уменьшаться). 3 л двигатель такой же мощный, как и поршневой агрегат с объемом чуть более 2.5 литров. Еще добавим, что роторный мотор имеет намного более высокую детонационную стойкость, что позволяет превратить этот мотор в двигатель на водороде.
3 л двигатель такой же мощный, как и поршневой агрегат с объемом чуть более 2.5 литров. Еще добавим, что роторный мотор имеет намного более высокую детонационную стойкость, что позволяет превратить этот мотор в двигатель на водороде.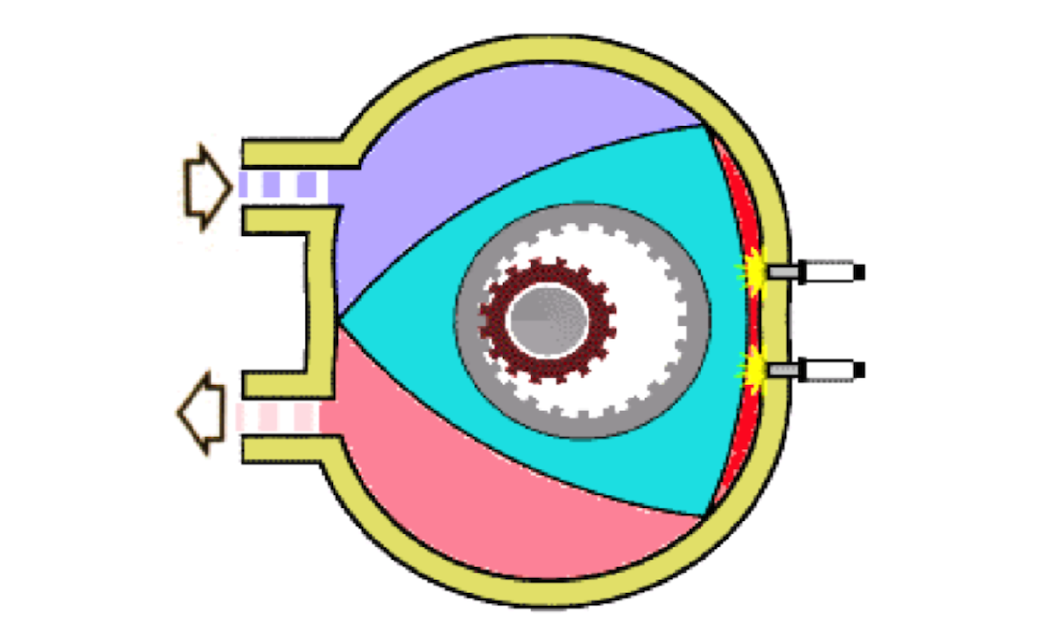 Во внутренней части ротора стоит роторный подшипник, напоминающий вкладыш коленвала.
Во внутренней части ротора стоит роторный подшипник, напоминающий вкладыш коленвала.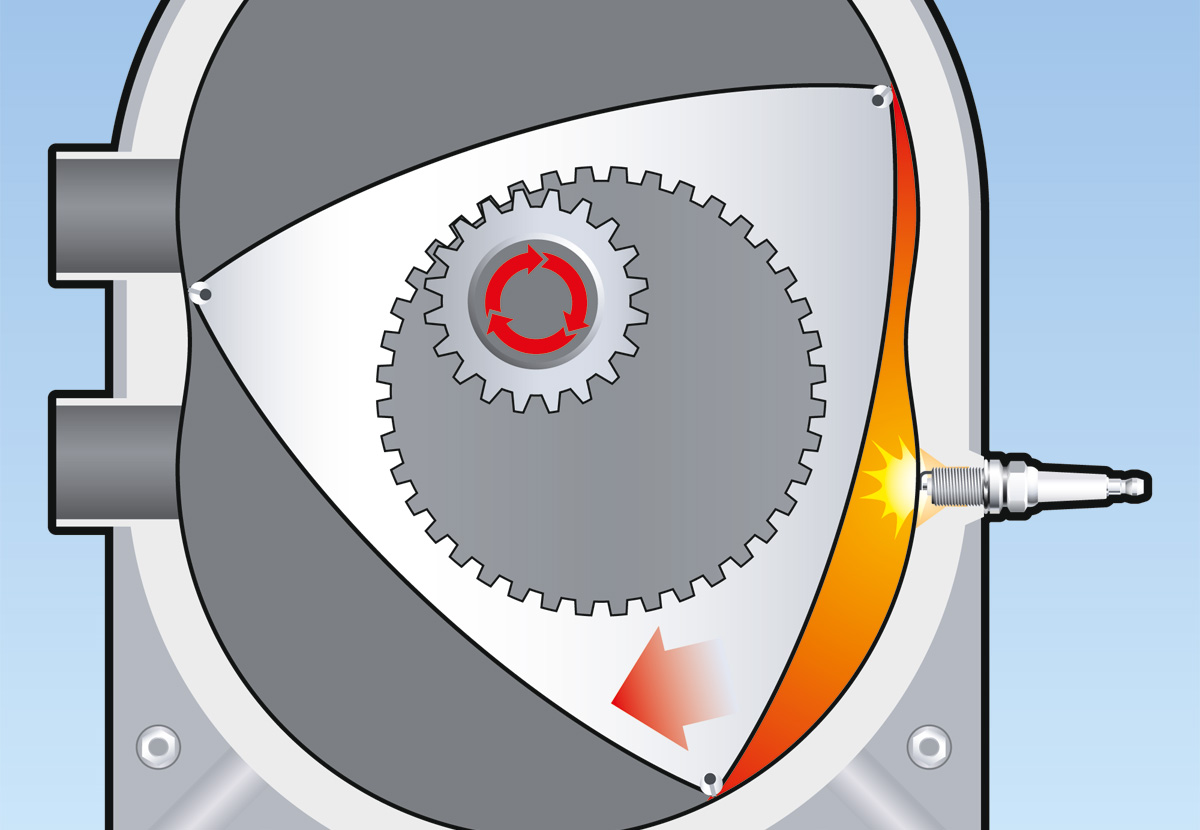
 с.). Однако немного позже владельцы уже на относительно небольших пробегах столкнулись с первыми проблемами и минусами данного типа ДВС.
с.). Однако немного позже владельцы уже на относительно небольших пробегах столкнулись с первыми проблемами и минусами данного типа ДВС. 
 Еще форсированные (роторные двигатели с наддувом) отличаются неравномерным нагревом корпуса.
Еще форсированные (роторные двигатели с наддувом) отличаются неравномерным нагревом корпуса. То же самое касается и ротора. Если пазы под апексы повреждены, отремонтировать деталь практически невозможно.
То же самое касается и ротора. Если пазы под апексы повреждены, отремонтировать деталь практически невозможно. д. Конечно, ремонт не дешевый, но однозначно более доступный по сравнению с покупкой нового силового агрегата.
д. Конечно, ремонт не дешевый, но однозначно более доступный по сравнению с покупкой нового силового агрегата.
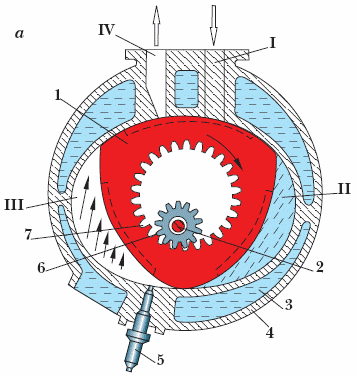 Значительно меньше вес и габариты.
Значительно меньше вес и габариты.
 Последняя Мазда RX Spirit R с роторным двигателем сошла с конвейера в 2012 году.
Последняя Мазда RX Spirit R с роторным двигателем сошла с конвейера в 2012 году.
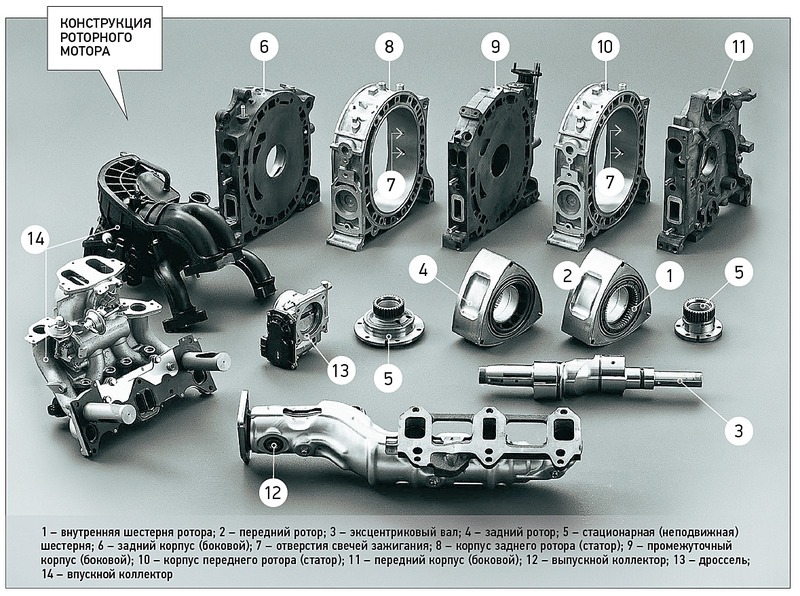
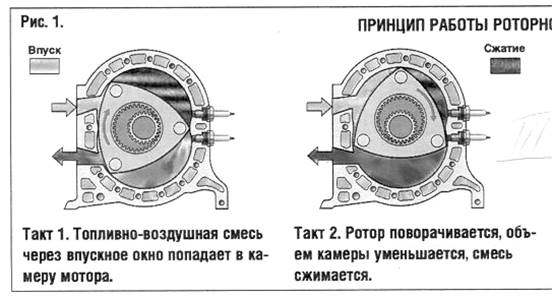
 Также данный тип силовой установки имеет более высокий КПД. Соответственно, даже при небольшом рабочем объеме «отдача» от такого мотора достаточно высокая.
Также данный тип силовой установки имеет более высокий КПД. Соответственно, даже при небольшом рабочем объеме «отдача» от такого мотора достаточно высокая. 
 Сам эксцентриковый вал проходит через все корпуса и стационарные шестерни. Вращение ротора, точнее, его вращательное движение происходит так, что на 1 его оборот приходится 3 оборота эксцентрикового вала.
Сам эксцентриковый вал проходит через все корпуса и стационарные шестерни. Вращение ротора, точнее, его вращательное движение происходит так, что на 1 его оборот приходится 3 оборота эксцентрикового вала.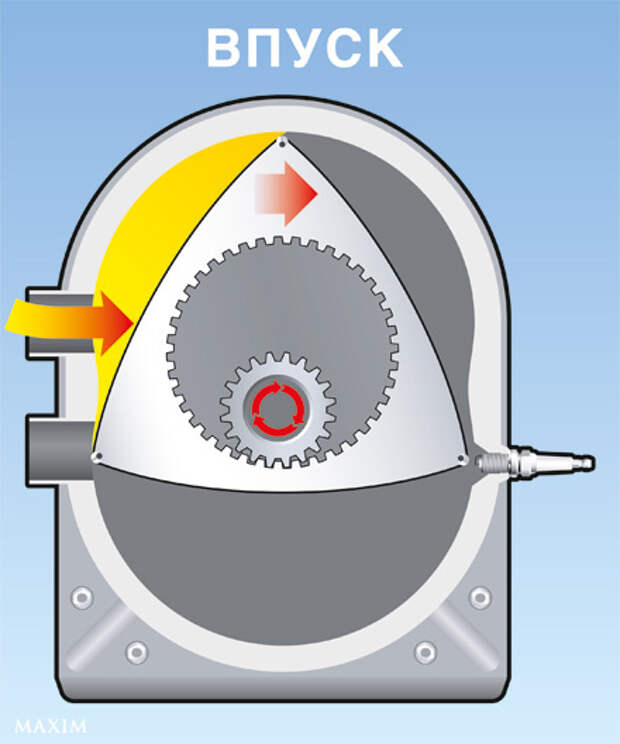 Когда полость достигает максимального объема, ротор перекроет впускные окна, после чего начнется такт сжатия (полость начнет уменьшаться).
Когда полость достигает максимального объема, ротор перекроет впускные окна, после чего начнется такт сжатия (полость начнет уменьшаться).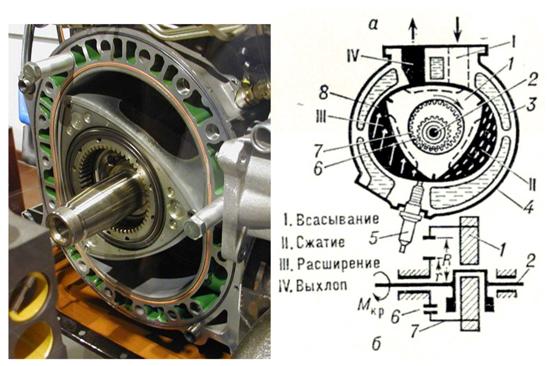 3 л двигатель такой же мощный, как и поршневой агрегат с объемом чуть более 2.5 литров. Еще добавим, что роторный мотор имеет намного более высокую детонационную стойкость, что позволяет превратить этот мотор в двигатель на водороде.
3 л двигатель такой же мощный, как и поршневой агрегат с объемом чуть более 2.5 литров. Еще добавим, что роторный мотор имеет намного более высокую детонационную стойкость, что позволяет превратить этот мотор в двигатель на водороде. Во внутренней части ротора стоит роторный подшипник, напоминающий вкладыш коленвала.
Во внутренней части ротора стоит роторный подшипник, напоминающий вкладыш коленвала.
 с.). Однако немного позже владельцы уже на относительно небольших пробегах столкнулись с первыми проблемами и минусами данного типа ДВС.
с.). Однако немного позже владельцы уже на относительно небольших пробегах столкнулись с первыми проблемами и минусами данного типа ДВС. 
 Еще форсированные (роторные двигатели с наддувом) отличаются неравномерным нагревом корпуса.
Еще форсированные (роторные двигатели с наддувом) отличаются неравномерным нагревом корпуса. То же самое касается и ротора. Если пазы под апексы повреждены, отремонтировать деталь практически невозможно.
То же самое касается и ротора. Если пазы под апексы повреждены, отремонтировать деталь практически невозможно.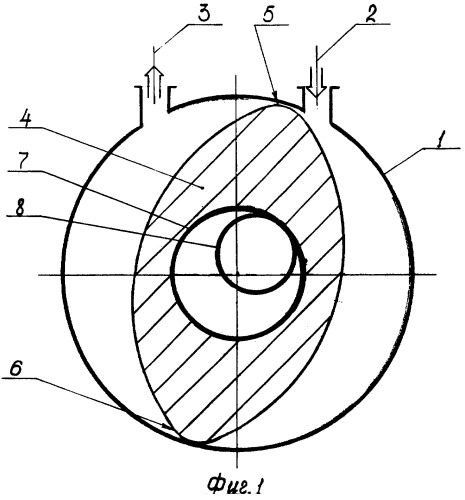
 д. Конечно, ремонт не дешевый, но однозначно более доступный по сравнению с покупкой нового силового агрегата.
д. Конечно, ремонт не дешевый, но однозначно более доступный по сравнению с покупкой нового силового агрегата. Из этой статьи вы узнаете, какие особенности имеет водородный двигатель, а также какие перспективы имеет двигатель на водороде.
Из этой статьи вы узнаете, какие особенности имеет водородный двигатель, а также какие перспективы имеет двигатель на водороде. Это принципиально другой вид двигателя, отличный от поршневых собратьев в семействе ДВС.
Это принципиально другой вид двигателя, отличный от поршневых собратьев в семействе ДВС.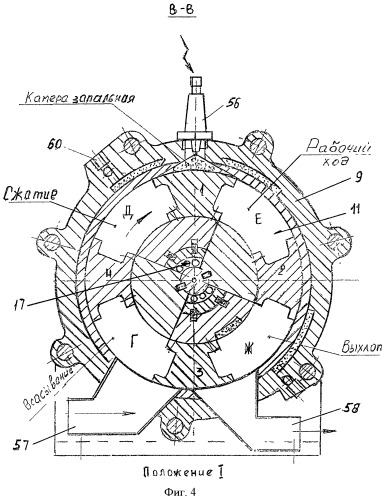 Получаются 3 изолированные камеры разные по объемным размерам. Здесь осуществляются процессы сжимания поступившей смеси горючего и воздуха, расширения газов, оказывающих давление на рабочую поверхность ротора и очищающих камеру сгорания от газов. На эксцентриковую ось передается круговое движение ротора. Сама ось находится на подшипниках и передает момент вращения на механизмы трансмиссии. В этих моторах осуществляется одновременная работа двух механических пар. Одна, которая состоит из шестерен, регулирует движение самого ротора. Другая — преобразует вращающиеся движение поршня во вращающиеся движения эксцентриковой оси.
Получаются 3 изолированные камеры разные по объемным размерам. Здесь осуществляются процессы сжимания поступившей смеси горючего и воздуха, расширения газов, оказывающих давление на рабочую поверхность ротора и очищающих камеру сгорания от газов. На эксцентриковую ось передается круговое движение ротора. Сама ось находится на подшипниках и передает момент вращения на механизмы трансмиссии. В этих моторах осуществляется одновременная работа двух механических пар. Одна, которая состоит из шестерен, регулирует движение самого ротора. Другая — преобразует вращающиеся движение поршня во вращающиеся движения эксцентриковой оси.
 Рабочая смесь получается при соприкосновении их с остаточными газами.
Рабочая смесь получается при соприкосновении их с остаточными газами.
 Снижаются экологичные показатели работы двигателя, так как горючее сгорает вместе с маслом, в результате в окружающую среду выбрасывается большое количество вредных веществ.
Снижаются экологичные показатели работы двигателя, так как горючее сгорает вместе с маслом, в результате в окружающую среду выбрасывается большое количество вредных веществ. Самый высокий КПД у поршневых дизельных двигателей составляет 50%. До настоящего времени ученые продолжают работу по изысканию резервов для повышения КПД двигателей.
Самый высокий КПД у поршневых дизельных двигателей составляет 50%. До настоящего времени ученые продолжают работу по изысканию резервов для повышения КПД двигателей. Исправить данную недоработку можно путем внесения изменений в устройство двигателя: когда главный движущийся рабочий элемент не прикасается к неподвижному корпусу. Постоянное плечо крутящего момента должно присутствовать на всем пути следования основного рабочего элемента.
Исправить данную недоработку можно путем внесения изменений в устройство двигателя: когда главный движущийся рабочий элемент не прикасается к неподвижному корпусу. Постоянное плечо крутящего момента должно присутствовать на всем пути следования основного рабочего элемента.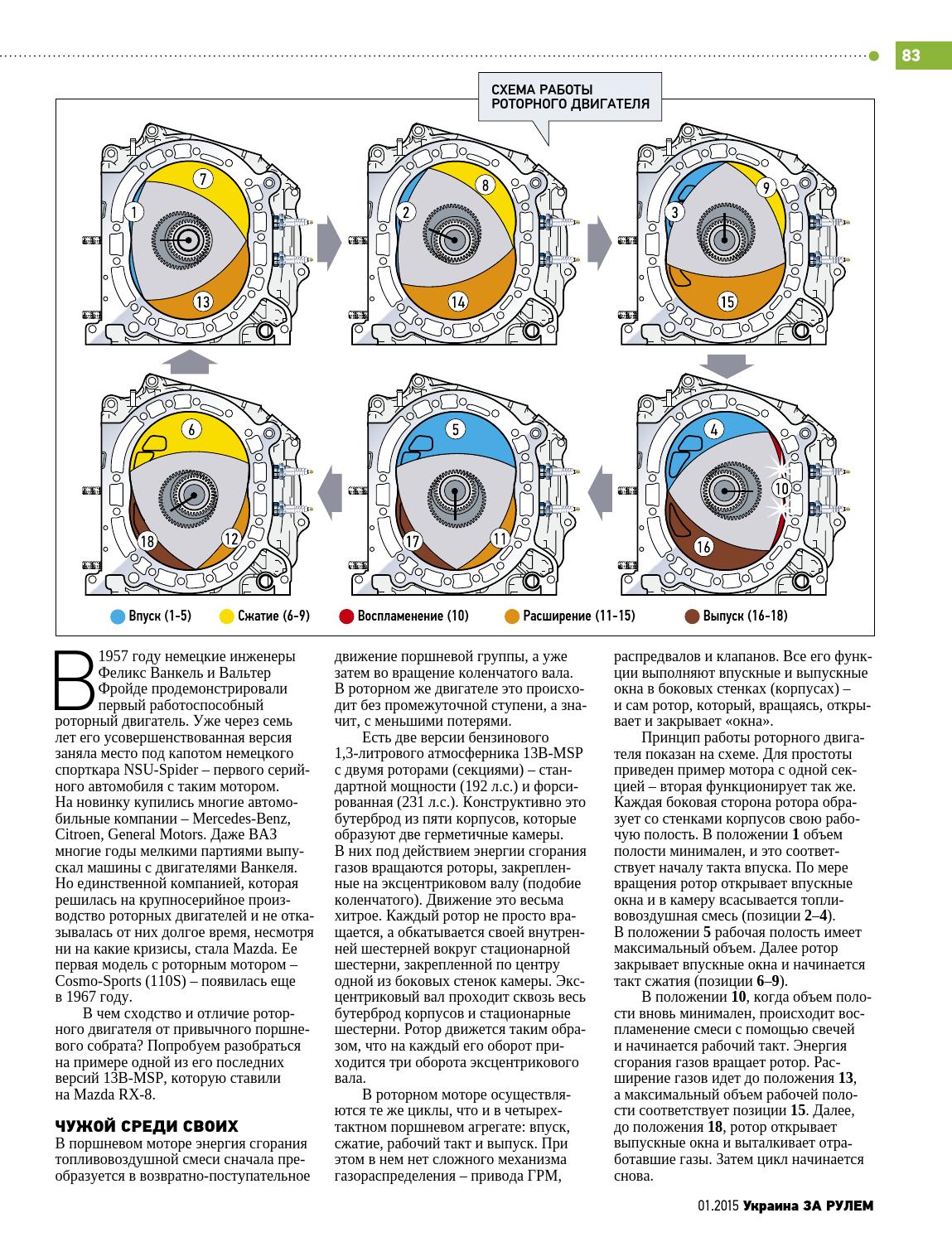
 С 2003 преемственность приняла модель Mazda RX-8, она и является на данный момент массовой и единственной версией автомобиля с двигателем Ванкеля.
С 2003 преемственность приняла модель Mazda RX-8, она и является на данный момент массовой и единственной версией автомобиля с двигателем Ванкеля. Свой первый серийный автомобиль ВАЗ с роторным двигателем под капотом представил публике в 1982 году, это был Ваз-21018. Машина внешне и конструктивно была как и все модели данной линейки, за одним исключением, а именно, под капотом стоял односекционный роторный двигатель мощностью 70 л.с. Длительность разработки не помешала случиться конфузу: на всех 50 опытных машинах при эксплуатации возникли поломки мотора, заставившие завод установить на его место обычный поршневой.
Свой первый серийный автомобиль ВАЗ с роторным двигателем под капотом представил публике в 1982 году, это был Ваз-21018. Машина внешне и конструктивно была как и все модели данной линейки, за одним исключением, а именно, под капотом стоял односекционный роторный двигатель мощностью 70 л.с. Длительность разработки не помешала случиться конфузу: на всех 50 опытных машинах при эксплуатации возникли поломки мотора, заставившие завод установить на его место обычный поршневой.
 Принцип работы, особенности, преимущества и недостатки
Принцип работы, особенности, преимущества и недостатки
 В такой силовой установке вместо стандартного поршня применяется трехгранный ротор, который с виду напоминает треугольник с закругленными концами. Данный своеобразный поршень имеет официальное название треугольник Рело, который вращается внутри цилиндра специального размера и формы выполненной по типу кривой плоскости, которая жестко связана с окружностью, катящейся по внешней стороне другой окружности. Справочно заметим, что двигатель Ванкеля, когда то считался мотором будущего, благодаря введению множества новаций при его разработке и производстве.
В такой силовой установке вместо стандартного поршня применяется трехгранный ротор, который с виду напоминает треугольник с закругленными концами. Данный своеобразный поршень имеет официальное название треугольник Рело, который вращается внутри цилиндра специального размера и формы выполненной по типу кривой плоскости, которая жестко связана с окружностью, катящейся по внешней стороне другой окружности. Справочно заметим, что двигатель Ванкеля, когда то считался мотором будущего, благодаря введению множества новаций при его разработке и производстве.  Эти моменты способствуют тому, что силовая установка способна выдерживать намного более высокие обороты в сравнении с классическим типом двигателя. Самой главной особенностью мотора Ванкеля является то, что обладая небольшим объемом камеры сгорания, двигатель выдает высокие показатели мощности. Что касается габаритов конструкции, то она опять же в сравнении с традиционным мотором, она в несколько раз меньше и содержит малое количество компонентов. Благодаря небольшому размеру двигателя оптимизируется расположение трансмиссии и следовательно улучшается развесовка узлов, что позволяет получить чуткую управляемость, а также помогает сделать автомобиль более просторным, как для водителя, так для пассажиров.
Эти моменты способствуют тому, что силовая установка способна выдерживать намного более высокие обороты в сравнении с классическим типом двигателя. Самой главной особенностью мотора Ванкеля является то, что обладая небольшим объемом камеры сгорания, двигатель выдает высокие показатели мощности. Что касается габаритов конструкции, то она опять же в сравнении с традиционным мотором, она в несколько раз меньше и содержит малое количество компонентов. Благодаря небольшому размеру двигателя оптимизируется расположение трансмиссии и следовательно улучшается развесовка узлов, что позволяет получить чуткую управляемость, а также помогает сделать автомобиль более просторным, как для водителя, так для пассажиров.
 В процессе горения топливно-воздушной смеси, главные потери энергии происходят через излучение, интенсивность, которого пропорционально 1/4 степени от общего показателя температуры. Если данный нюанс рассматривать с точки зрения снижения удельной поверхности за счет потерь теплоты, то идеальной формой камеры сгорания должна быть сфера, то есть шар. Таким образом, образованная в процессе сгорания мощная энергия не только бесполезно выходит из камеры, то и ведет к тому, что происходит перегрев рабочей области цилиндра.
В процессе горения топливно-воздушной смеси, главные потери энергии происходят через излучение, интенсивность, которого пропорционально 1/4 степени от общего показателя температуры. Если данный нюанс рассматривать с точки зрения снижения удельной поверхности за счет потерь теплоты, то идеальной формой камеры сгорания должна быть сфера, то есть шар. Таким образом, образованная в процессе сгорания мощная энергия не только бесполезно выходит из камеры, то и ведет к тому, что происходит перегрев рабочей области цилиндра.

 любого закона.
любого закона. Очевидно, что эти вопросы были тщательно продуманы, и этот документ не стремится подорвать какую-либо из этих работ, но служит координационным центром для полезного обсуждения.
Очевидно, что эти вопросы были тщательно продуманы, и этот документ не стремится подорвать какую-либо из этих работ, но служит координационным центром для полезного обсуждения.
 Роботы также имеют множество применений. Хотя творческий конечный пользователь, вероятно, мог бы использовать любого робота для насильственных целей, как и с тупым орудием, мы говорим, что роботы никогда не должны быть разработаны исключительно или даже в основном для использования в качестве оружия со смертельным или другим наступательным потенциалом. Этот закон, в случае его принятия, ограничит коммерческие возможности роботов, но мы рассматриваем его как важный принцип для признания их безопасными в гражданском обществе.
Роботы также имеют множество применений. Хотя творческий конечный пользователь, вероятно, мог бы использовать любого робота для насильственных целей, как и с тупым орудием, мы говорим, что роботы никогда не должны быть разработаны исключительно или даже в основном для использования в качестве оружия со смертельным или другим наступательным потенциалом. Этот закон, в случае его принятия, ограничит коммерческие возможности роботов, но мы рассматриваем его как важный принцип для признания их безопасными в гражданском обществе.

 Несмотря на то, что колеса и шины изготавливаются с очень высокой точностью, биение колеса при езде возникает довольно часто. Ехать становится неприятно, а в случае сильного биения – даже опасно: можно потерять контроль над автомобилем. Но такое случается редко.
Несмотря на то, что колеса и шины изготавливаются с очень высокой точностью, биение колеса при езде возникает довольно часто. Ехать становится неприятно, а в случае сильного биения – даже опасно: можно потерять контроль над автомобилем. Но такое случается редко. В шинных центрах «Наколесах» такого быть не может.
В шинных центрах «Наколесах» такого быть не может.
 Но периодически процедура действительно нужна, поскольку практически в 100% случаев центр масс и геометрический центр колеса не совпадают. Это доставляет массу дискомфорта во время езды, увеличивает износ шин и ведет к ряду других негативных последствий.
Но периодически процедура действительно нужна, поскольку практически в 100% случаев центр масс и геометрический центр колеса не совпадают. Это доставляет массу дискомфорта во время езды, увеличивает износ шин и ведет к ряду других негативных последствий. Поэтому несбалансированность колес легко распознать по следующим признакам:
Поэтому несбалансированность колес легко распознать по следующим признакам: Их дисбаланс приводит к ухудшению управляемости автомобиля. Причиной тому становится смещение центра тяжести колеса с оси вращения, из-за чего он располагается уже не равноудаленно от всей поверхности. Такое колесо считают неотбалансированным.
Их дисбаланс приводит к ухудшению управляемости автомобиля. Причиной тому становится смещение центра тяжести колеса с оси вращения, из-за чего он располагается уже не равноудаленно от всей поверхности. Такое колесо считают неотбалансированным. Автомобиль подскакивает на любой скорости, а его руль невозможность поймать. При таком дисбалансе особенно быстро приходит в негодность подвеска.
Автомобиль подскакивает на любой скорости, а его руль невозможность поймать. При таком дисбалансе особенно быстро приходит в негодность подвеска.
 Она обеспечивает комфортную езду по дорогам любого вида и качества. Также балансировка колес выполняет еще несколько важных функций:
Она обеспечивает комфортную езду по дорогам любого вида и качества. Также балансировка колес выполняет еще несколько важных функций: Законов, которые делали бы балансировку обязательной, не существует. Но все же не стоит ее избегать: ремонт в связи с дисбалансом может обойтись дорого, а в худшем случае из-за плохой управляемости могут пострадать пассажиры и сам водитель.
Законов, которые делали бы балансировку обязательной, не существует. Но все же не стоит ее избегать: ремонт в связи с дисбалансом может обойтись дорого, а в худшем случае из-за плохой управляемости могут пострадать пассажиры и сам водитель. Для начала необходимо произвести замену покрышек и уже их отбалансировать. Своевременная балансировка колес при смене резины и в других случаях гарантирует подвеске и шинам продолжительный срок эксплуатации, а водителю — безопасную и комфортную езду.
Для начала необходимо произвести замену покрышек и уже их отбалансировать. Своевременная балансировка колес при смене резины и в других случаях гарантирует подвеске и шинам продолжительный срок эксплуатации, а водителю — безопасную и комфортную езду.
 Компания исходит из того, что пользователь предоставляет достоверную и достаточную персональную информацию по вопросам, предлагаемым в формах. Ответственность за правильность и достоверность вводимых персональных данных Пользователь несет самостоятельно.
Компания исходит из того, что пользователь предоставляет достоверную и достаточную персональную информацию по вопросам, предлагаемым в формах. Ответственность за правильность и достоверность вводимых персональных данных Пользователь несет самостоятельно.

 9 Федерального закона от 27.07.2006 г. №152-ФЗ «О персональных данных» (с изменениями и дополнениями) и ст.18 Федерального закона от 13.03.2006 г. №38-ФЗ «О рекламе».
9 Федерального закона от 27.07.2006 г. №152-ФЗ «О персональных данных» (с изменениями и дополнениями) и ст.18 Федерального закона от 13.03.2006 г. №38-ФЗ «О рекламе». Меры, применяемые для защиты персональной информации пользователей
Меры, применяемые для защиты персональной информации пользователей Она существенно улучшает управляемость транспортным средством на дороге.
Она существенно улучшает управляемость транспортным средством на дороге. Такие работы выполняются в обязательном порядке после замены шины, ремонта ходовой. Также после замены резины балансируют колеса, поэтому такая процедура должна выполняться не реже 2 раз в год, а при необходимости – гораздо чаще.
Такие работы выполняются в обязательном порядке после замены шины, ремонта ходовой. Также после замены резины балансируют колеса, поэтому такая процедура должна выполняться не реже 2 раз в год, а при необходимости – гораздо чаще.




 Здесь имеют преимущества те шиномонтажи, у которых есть возможность вывесить машину сразу на 4 опоры.
Здесь имеют преимущества те шиномонтажи, у которых есть возможность вывесить машину сразу на 4 опоры. Но имейте ввиду, что такая экономия не покроет затраты на ремонт машины)).
Но имейте ввиду, что такая экономия не покроет затраты на ремонт машины)). Так же будет не лишней тратой денег прокатать диск, если это необходимо.
Так же будет не лишней тратой денег прокатать диск, если это необходимо. Во многом залог хорошей балансировки — это руки мастера. Хороший мастер всегда определяется умением из г**на сделать конфетку!
Во многом залог хорошей балансировки — это руки мастера. Хороший мастер всегда определяется умением из г**на сделать конфетку! е. колесо центруется исключительно на одних болтах, и эксплуатация таких дисков без центровочных колец не вызывало у водителей никаких нареканий. Одно могу сказать точно, ибо сталкивались на практике. Когда на балансировке само колесо показывало исключительную геометрию, но по непонятной причине сохранялось биение — здесь вывод один: присутствует однозначная проблема с соосностью колеса и ступицы. Во многих случаях после установки центровочных колец вибрация пропадала. Так же в некоторых случаях вибрация пропадала даже после ослабления и перетяжки болтов. Не ругайте меня сильно, если вам покажутся мои доводы наивными. Я больше практик, а не теоретик. Если расстояние между ступицей и внутренним отверстием диска имеет зазор, мы рекомендуем ставить центровочные кольца.
е. колесо центруется исключительно на одних болтах, и эксплуатация таких дисков без центровочных колец не вызывало у водителей никаких нареканий. Одно могу сказать точно, ибо сталкивались на практике. Когда на балансировке само колесо показывало исключительную геометрию, но по непонятной причине сохранялось биение — здесь вывод один: присутствует однозначная проблема с соосностью колеса и ступицы. Во многих случаях после установки центровочных колец вибрация пропадала. Так же в некоторых случаях вибрация пропадала даже после ослабления и перетяжки болтов. Не ругайте меня сильно, если вам покажутся мои доводы наивными. Я больше практик, а не теоретик. Если расстояние между ступицей и внутренним отверстием диска имеет зазор, мы рекомендуем ставить центровочные кольца. (В этом можно убедиться попросив ослабить крепление колеса на шпинделе балансировочного станка, и, повернув его на 180 градусов, отбалансировать снова. По нашему мнению наиболее правильная центровка возможна только с применением специальных балансировочных адаптеров Haweka. Не реклама это конечно — просто наше мнение. Ну и конечно же руки мастера – не последнее в этом подспорье.
(В этом можно убедиться попросив ослабить крепление колеса на шпинделе балансировочного станка, и, повернув его на 180 градусов, отбалансировать снова. По нашему мнению наиболее правильная центровка возможна только с применением специальных балансировочных адаптеров Haweka. Не реклама это конечно — просто наше мнение. Ну и конечно же руки мастера – не последнее в этом подспорье. При балансировке легкосплавных дисков, для снижения веса балансировочных грузиков они должны располагаться максимально близко к ободам диска. Надо понимать что когда вместо набивных грузов используются клеящиеся на внутреннюю поверхность диска, то вес груза возрастает раза в полтора, за счет уменьшения рычага противовеса, особенно с внешней стороны диска. А так же если с третьей-четвёртой попытки не удаётся отбалансировать колесо, потому что масса грузов с каждым измерением постоянно меняется, значит внутри колеса вода или мусор. Без нервов бортируем шину, чистим всё внутри и балансируем колесо снова.
При балансировке легкосплавных дисков, для снижения веса балансировочных грузиков они должны располагаться максимально близко к ободам диска. Надо понимать что когда вместо набивных грузов используются клеящиеся на внутреннюю поверхность диска, то вес груза возрастает раза в полтора, за счет уменьшения рычага противовеса, особенно с внешней стороны диска. А так же если с третьей-четвёртой попытки не удаётся отбалансировать колесо, потому что масса грузов с каждым измерением постоянно меняется, значит внутри колеса вода или мусор. Без нервов бортируем шину, чистим всё внутри и балансируем колесо снова. Мне же кажется это заводские маркеры какие-то для автоматизации процесса сортировки или чего-то там ещё. Хотя бы даже потому, что маркируется шина только с одной стороны. И как в таком случае быть, если шина должна собираться маркером вниз? Как в этом случае его совмещать с соском? И почему такие уважаемые фирмы как Mishelin и Pirelli не додумались до такого «гламура» ставить эти красные и жёлтые точки?)) Утверждение это беспочвенное и к балансировке не имеет никакого отношения – доказано эксперементально)). Иногда даже разворот в противоположную сторону от соска даёт лучшие результаты на балансировке. И вообще, максимально точно совместить шину с диском возможно только с использованием современного балансировочного оборудования. Такой процесс совмещения мы называем «оптимизация».
Мне же кажется это заводские маркеры какие-то для автоматизации процесса сортировки или чего-то там ещё. Хотя бы даже потому, что маркируется шина только с одной стороны. И как в таком случае быть, если шина должна собираться маркером вниз? Как в этом случае его совмещать с соском? И почему такие уважаемые фирмы как Mishelin и Pirelli не додумались до такого «гламура» ставить эти красные и жёлтые точки?)) Утверждение это беспочвенное и к балансировке не имеет никакого отношения – доказано эксперементально)). Иногда даже разворот в противоположную сторону от соска даёт лучшие результаты на балансировке. И вообще, максимально точно совместить шину с диском возможно только с использованием современного балансировочного оборудования. Такой процесс совмещения мы называем «оптимизация». Такие диски в общем отношении к обычному литью попадались мне очень редко.
Такие диски в общем отношении к обычному литью попадались мне очень редко. me
me Это необходимо для того, чтобы обеспечивать равнозначное сцепление с поверхностью по всей форме тела. Кроме того, гранулы покрыты силиконом, а в центре имеют тяжелое керамическое или стеклянное ядро. Силикон демпфирует удары гранул, и позволяет подстроиться под форму поверхности, к которой они будут «прилипать». Тяжелое ядро необходимо для того, чтобы максимально участвовать в процессе балансировки колеса, то есть при «правильном» распределении оказывать «положительное» действие.
Это необходимо для того, чтобы обеспечивать равнозначное сцепление с поверхностью по всей форме тела. Кроме того, гранулы покрыты силиконом, а в центре имеют тяжелое керамическое или стеклянное ядро. Силикон демпфирует удары гранул, и позволяет подстроиться под форму поверхности, к которой они будут «прилипать». Тяжелое ядро необходимо для того, чтобы максимально участвовать в процессе балансировки колеса, то есть при «правильном» распределении оказывать «положительное» действие.
 Второй, когда выкручивается ниппель, и гранулы засыпаются через штуцер.
Второй, когда выкручивается ниппель, и гранулы засыпаются через штуцер. Само собой, колесо при вращении будет подпрыгивать от неравномерности распределения центробежной силы по всему периметру. Тем самым будут наблюдаться вибрации, толчки, подпрыгивания… Все эти значимые механические воздействия постоянно будут встряхивать гранулы, которые находятся в колесе. В итоге, они то и дело будут хаотично перемещаться по объему до тех пор, пока колесо не «успокоится». А «успокоиться» колесо лишь в одном случае, когда центробежная сила по всему периметру, а значит и масса, будет уравновешено, то есть колесо окажется отбалансированым. В этом случае вибрации ослабнут до таких пределов, что электростатической и центробежной силы, удерживающей гранулы, хватит на то, чтобы они оставались в своем положении, то есть обеспечивали балансировку колеса. Можно сказать, что балансировка в этом случае происходит автоматически и самопроизвольно, хотим ли мы этого или нет.
Само собой, колесо при вращении будет подпрыгивать от неравномерности распределения центробежной силы по всему периметру. Тем самым будут наблюдаться вибрации, толчки, подпрыгивания… Все эти значимые механические воздействия постоянно будут встряхивать гранулы, которые находятся в колесе. В итоге, они то и дело будут хаотично перемещаться по объему до тех пор, пока колесо не «успокоится». А «успокоиться» колесо лишь в одном случае, когда центробежная сила по всему периметру, а значит и масса, будет уравновешено, то есть колесо окажется отбалансированым. В этом случае вибрации ослабнут до таких пределов, что электростатической и центробежной силы, удерживающей гранулы, хватит на то, чтобы они оставались в своем положении, то есть обеспечивали балансировку колеса. Можно сказать, что балансировка в этом случае происходит автоматически и самопроизвольно, хотим ли мы этого или нет.