
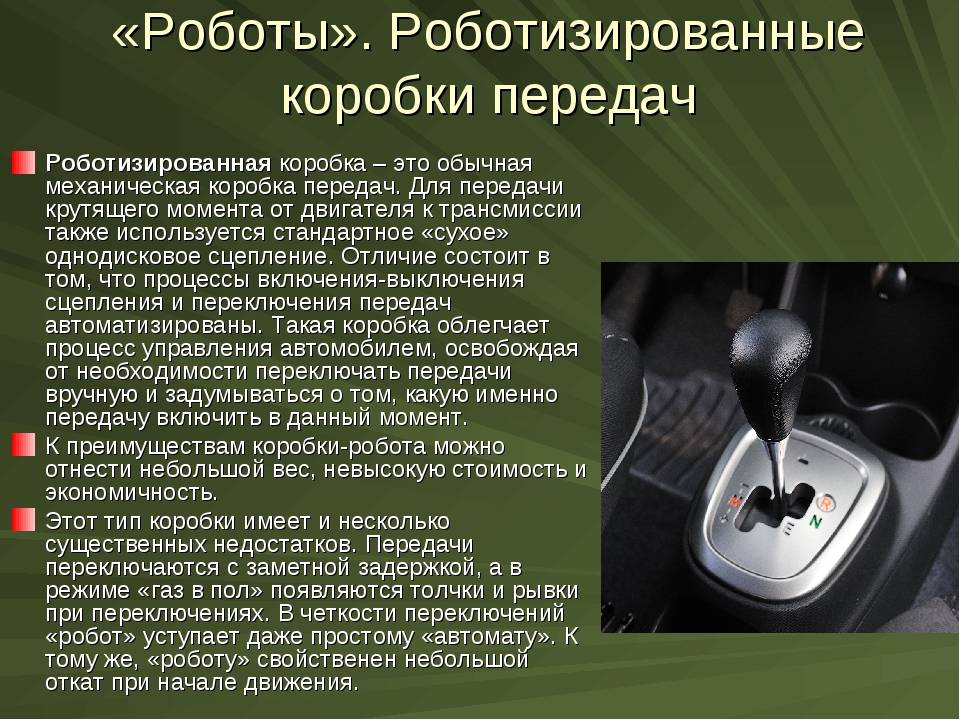
Коробка-робот Опель Корса. Замена масла в КПП (МКПП и АКПП) недорого в Санкт-Петербурге
Сегодня среди водителей-любителей иногда встречается путаница. Все коробки передач, кроме простой механики, относят к автоматам. Это касается классических автоматов, вариаторов и роботов. Однако роботизированная КПП скорее принадлежит к категории механических, автоматических коробок передач.
Наши услуги
В наших автосервисах выполняются работы по техническому обслуживанию и ремонту автомобилей Opel Corsa. Одной из востребованных операций является замена масла в РКПП (АКПП).
Помимо замены масла, мы также производим следующие работы:
- комплексная диагностика;
- техническое обслуживание любого уровня;
- настройка и регулировка различных систем автомобиля;
- ремонт узлов и агрегатов;
- замена изношенных деталей;
- кузовной ремонт и другие сварочно-резочные работы;
- прочие ремонтные и восстановительные операции.


Мы за годы практики выработали несколько принципов, которых четко придерживаемся.
- Использование в работе профессионального инструмента и специализированной оснастки.
- Допуск к работе профессионалов. В наших автосервисах мы доверяем ответственные операции только тем мастерам, которые имеют опыт работы в той или иной области.
- Соблюдение оговоренных сроков ремонта. Мы стараемся максимально точно называть сроки выполнения работ, что позволяет клиенту планировать свое время.
- Использование качественных расходных материалов и запасных частей. Наша служба снабжения работает только с проверенными поставщиками запчастей и материалов.
- Справедливое ценообразование. Перед началом работ создается калькуляция, в которой детально расписаны выполняемые работы, используемые материалы и стоимость каждого отдельного пункта ремонта.
Благодаря профессиональному подходу к ремонту и обслуживанию автомобилей, многие автовладельцы сегодня выбирают именно нас.
Почему нужна на Опель Корса замена масла в МКПП и АКПП?
В автоматической коробке передач рабочая жидкость выполняет более сложную функцию. Помимо смазки и защиты, она также является переносчиком энергии. Именно функция переноса энергии оказывает наибольшее воздействие на масло. В механических версиях КПП весь крутящий момент передается посредством зубчатых передач.
Масло в МКПП выполняет следующие функции:
- защита рабочих поверхностей валов, зубчатых колес и подшипников от коррозионных процессов и создание на поверхности этих элементов пленки, защищающей от повреждений в начале движения, когда интенсивное разбрызгивание еще не началось;
- смазка поверхности зубьев в точках контакта на протяжении всего процессе работы коробки для снижения интенсивности поверхностного разрушения;
- отвод тепла от разогревающихся рабочих поверхностей.
Чтобы понять, почему нужно менять масло в роботизированной коробке передач, рассмотрим процессы, которые происходят в ней с увеличением пробега.
- Старение масла. Несмотря на относительно высокую стабильность свойства масляной основы и пакета присадок, любое масло со временем начинает стареть. Это проявляется в частичном изменении его химического состава и, соответственно, рабочих свойств.
- Окисление и другие химические реакции присадок и масляной основы под воздействием высокой температуры. Происходит это в основном тогда, когда нагрузка на коробку существенно увеличивается, или если шестерни имеют ощутимую выработку с нарушением правильности зацепления. На пятне контакта зубьев возникает интенсивное трение. При этом поверхность может разогреваться до нескольких сотен градусов, что вызывает термическое разрушение масла, находящегося в точке контакта.
- Наполнение смазки продуктами износа шестерен. Процесс износа присутствует всегда. Масло лишь понижает скорость изнашивания. Мелкие частицы металла постепенно заполняют масляную основу, снижая ее смазывающие свойства и добавляя абразивные.
СПРАВКА: На масляном поддоне заводом-изготовителем устанавливается магнит, который предназначен для улавливания отслоившихся от рабочих поверхностей частиц металла. Однако этот магнит не может улавливать и удерживать на своей поверхности весь выделяемый объем металлической стружки, и часть ее продолжает циркулировать между шестернями, увеличивая интенсивность износа.
Производитель указывает, что масло рассчитано на весь срок службы РКПП. Это один из тех немногочисленных случаев, когда рекомендации производителя скорее вредоносные, чем полезные. Скорее всего, это вызвано маркетинговыми решениями. Подавляющее большинство опытных механиков склоняется к мнению, что масло в РКПП стоит менять. Период между заменами составляет приблизительно 100 тысяч километров пробега. На этой отметке отмечается некоторое снижение защитно-смазочных свойств и довольно обильное засорение масла продуктами износа.
Коробка-робот Опель Корса: замена масла
В коробке-роботе автомобиля Opel Corsa замена масла происходит немного сложнее, чем в обычной механике. Для замены понадобится 1,6 л масла и прокладка под поддон.
Для замены понадобится 1,6 л масла и прокладка под поддон.
СПРАВКА: Оригинальное трансмиссионное масло для роботизированных коробок рассматриваемого автомобиля продается в емкостях по 1 л. Поэтому в любом случае придется приобретать 2 банки.
Процедура замены масла в роботизированной коробке Opel Corsa предусматривает демонтаж поддона, так как сливная пробка на этой модели отсутствует. Это позволяет провести осмотр состояния рабочих механизмов РКПП. Опытному мастеру, профессионально занимающемуся коробками передач, визуальный доступ к валам и шестерням позволяет довольно точно оценить состояние рабочих узлов.
При замене изучается содержимое отработавшего масла и наличие стружки на магните. Это также важная информация, которая может предупредить водителя о неисправностях коробки.
Если в процессе замены были обнаружены какие-либо дефекты – об этом обязательно будет сообщено водителю. Коробки-роботы довольно легко и относительно безболезненно поддаются ремонту на зачаточных стадиях неисправностей.![]() Если же упустить момент и довести РКПП до предельного состояния, то зачастую ремонт становится невозможен. Поможет только замена коробки на новую. А это дорогой и трудоемкий процесс.
Если же упустить момент и довести РКПП до предельного состояния, то зачастую ремонт становится невозможен. Поможет только замена коробки на новую. А это дорогой и трудоемкий процесс.
Стоимость замены масла КПП Опель Корса
Традиционно конечная стоимость замены складывается из затраченной работы и цены материалов. В случае с заменой масла в РКПП используются следующие материалы:
- трансмиссионное масло;
- прокладка поддона;
- герметик (по необходимости в зависимости от состояния контактирующих поверхностей).
Иногда водители решают сэкономить на замене и приобретают менее дорогое, неоригинальное масло. За счет этого конечная стоимость окажется ниже, но впоследствии подобный подход может отразиться на ресурсе РКПП.
ВАЖНО! Иногда автовладельцы приобретают масло с пониженными показателями вязкости. Якобы такое масло позволяет в зимнее время экономить топливо за счет снижения внутренних сопротивлений в коробке.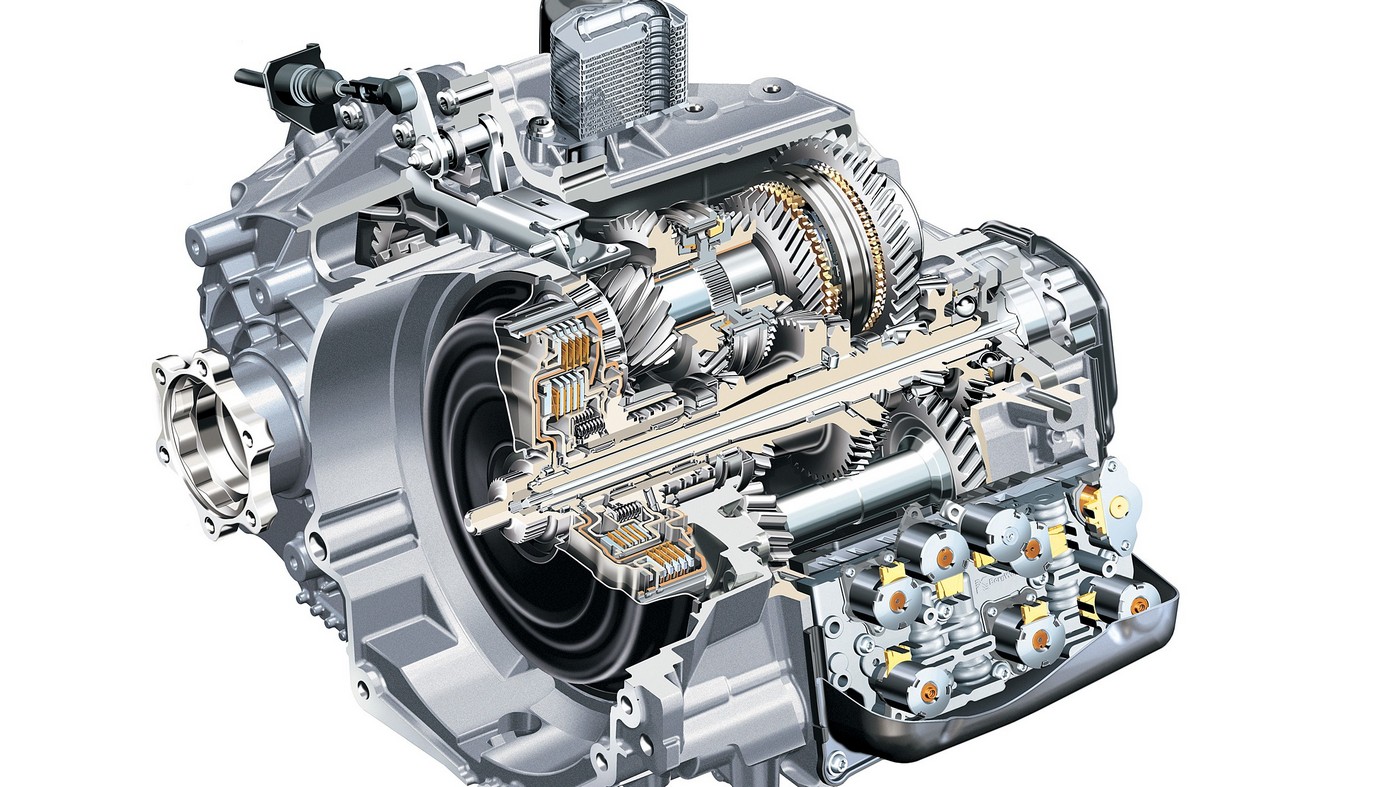 В зимнее время — это действительно так. Однако летом масло с низкой вязкостью становится слишком жидким и в меньшей степени обеспечивает защиту и смазку трущихся поверхностей, что ускоряет износ и сокращает ресурс коробки. Так что такое решение весьма сомнительно с точки зрения экономии и здравого смысла.
В зимнее время — это действительно так. Однако летом масло с низкой вязкостью становится слишком жидким и в меньшей степени обеспечивает защиту и смазку трущихся поверхностей, что ускоряет износ и сокращает ресурс коробки. Так что такое решение весьма сомнительно с точки зрения экономии и здравого смысла.
Коробка автомат робот, обзор роботизированных КПП
Наверное, каждый автомобилист сегодня знает, что такое механическая и автоматическая трансмиссии. Однако, далеко не каждому отечественному автолюбителю известно о том, что представляет собой коробка автомат робот. Этот тип КПП, грубо говоря – механическая трансмиссия, где опции выключения сцепления и переключения скоростей автоматизированы. Поскольку этот тип КПП называется роботизированным, это означает, что агрегат управляется дополнительным устройством – электронным блоком, который при этом пользуется заложенными в него алгоритмами. В этой статье вы подробно узнаете о роботизированных трансмиссиях и их типах.
Как показывают отзывы, для роботизированных трансмиссий присущ не только комфорт традиционного «автомата», но и надежность, а также экономичность, как в случае с МКПП. Нужно подчеркнуть, что коробка автомат робот, помимо всего прочего, более дешевая, чем традиционные «автоматы». На сегодняшний день часто автомобильные концерны оборудуют этим типом трансмиссии свои автомобили.
Содержание
- Как устроена коробка автомат робот
- КПП с двойным сцеплением
- Коробка автомат робот – принцип работы
Как устроена коробка автомат робот
В зависимости от производителя коробка автомат робот может различаться по своей конструкции, однако устройство у них идентичное – это механическая трансмиссия с автоматической системой управления и скоростями. Как известно, в традиционных «автоматах» применяется сцепление фрикционного типа. В частности, это может быть пакет фрикционных дисков или один диск. Некоторые авто-производители оборудуют свои трансмиссии двойным типом сцепления. Этот тип является наиболее прогрессивным и позволяет обеспечить передачу крутящего момента без потери мощности.
Этот тип является наиболее прогрессивным и позволяет обеспечить передачу крутящего момента без потери мощности.
Коробка автомат робот как вы поняли, в основе конструкции имеет обычную «механику», а при производстве на предприятиях разработчики обычно используют уже имеющиеся технические решения. К примеру, автоматическая трансмиссия «Спидшифт» от компании «Мерседес-Бенц» производится на основе «автомата» 7G-Tronic, но в случае с «роботом» гидротрансформатор заменяется на фрикционное многодисковое сцепление. А вот роботизированные агрегаты СМГ от компании «БМВ» производятся на основе механической «шестиступки», которая оснащена электрогидравлическим приводом сцепления.
Необходимо отметить, что коробка автомат робот может быть оборудована либо электрическим, либо гидравлическим приводом сцепления и передач. Если авто оснащено «роботом» с электрическим приводом, то в этом случае исполнительными элементами являются серверные устройства, в частности электрический мотор и механическая передача. Если говорить о гидравлических приводах, то в них роль исполнительных устройств исполняют гидроцилиндры, которые управляются при помощи электромагнитных клапанов. Многие авто-производители именуют этот привод электрогидравлическим. Коробка автомат робот от «Опель» и «Форд» имеет гидравлический блок с мотором для изменения положения основного цилиндра привода.
Если говорить о гидравлических приводах, то в них роль исполнительных устройств исполняют гидроцилиндры, которые управляются при помощи электромагнитных клапанов. Многие авто-производители именуют этот привод электрогидравлическим. Коробка автомат робот от «Опель» и «Форд» имеет гидравлический блок с мотором для изменения положения основного цилиндра привода.
Пожалуй, самым отличительным свойством электрического привода считается низкая скорость функционирования, поскольку в данном случае переключение скоростей происходит в среднем за 0.3-0.5 секунд, а также меньшее потребление энергии. Что касается гидропривода, то он регулярно поддерживает давление в системе, соответственно, потребляет больше энергии. Тем не менее, этот узел является более быстрым по сравнению с электрическим. Некоторые роботизированные трансмиссии, которыми оборудуются спортивные авто, могут переключать передачи с очень высокой скоростью. К примеру, в некоторых моделях Феррари этот показатель составляет 0.06 секунд.
Собственно, именно эти характеристики определяют сферу использования роботизированных КПП с электроприводом на бюджетных машинах, а с гидроприводом – на более элитных транспортных средствах.
Коробка автомат робот на электроприводе на сегодняшний день устанавливается в авто компаниями:
- Форд – Durashift EST;
- Пежо – 2-Троник;
- Ситроен – СенсоДрайв;
- Тойота – МультиМод;
- Опель – Изитроник;
- Митсубиси – Олшифт;
- Фиал – Дуалоджик.
Коробка автомат робот с гидроприводом выпускается компаниями:
- БМВ – КПП передач СМГ;
- Рено – Квикшифт;
- Альфа Ромео – Селеспид;
- Ауди – Р-Троник;
- Ламборджини – ISR.
Управление коробкой передач осуществляется электронной системой, состоящей из многих различных регуляторов и датчиков, а также блоком управления и прочими исполнительными устройствами и узлами КПП. Входные регуляторы предназначены для мониторинга важных параметров агрегата, таких как:
- показатель частота вращения диска;
- место расположения вилок для переключения передач;
- в каком положения находится селектор агрегата;
- какое давление жидкости в смазывающей системе агрегата;
- температура смазки.

Полученные параметры получает ЭБУ. На основании этой информации блок отдает команды исполнительным узлам, применяя алгоритмы, установленные автомобильным производителем. При функционировании блок напрямую функционирует с системой управления ДВС, а также ABS. Коробка автомат робот с гидравлическими приводами оборудуются дополнительным гидроблоком, предназначенным для управления цилиндрами, а также показателем давления.
Теперь что касается исполнительных узлов и устройств. Эти компоненты могут быть разными в зависимости от типа установленного на агрегат привода. К примеру, если привод является электрическим, то роль исполнительного устройства будет выполнять специальный моторчик, а если гидравлическим – то этим займутся электромагнитные клапаны.
КПП с двойным сцеплением
Основываясь на практике и отзывах от других потребителей, одним из главных минусов коробки автомат робот считается относительно немалое время переключения режимов. В итоге это может привести к толчкам и рывкам, а также ухудшению свойств динамики на некоторое время, что напрямую влияет на комфорт при управлении машиной. Данная проблема была решена разработчиками благодаря внедрению дополнительного сцепления в конструкцию агрегата, в результате чего водитель теперь может переключать передачи без потери потока мощности.
Данная проблема была решена разработчиками благодаря внедрению дополнительного сцепления в конструкцию агрегата, в результате чего водитель теперь может переключать передачи без потери потока мощности.
Нужно также добавить, что двойное сцепление дает возможность при активированной передаче выбирать следующую, а если понадобится – то включить ее сразу же, без потери времени. Именно поэтому «робот» с двумя сцеплениями иногда называется преселективной КПП.
Коробка автомат робот имеет еще одно немаловажное преимущество: хорошая скорость при переключении режимов, которая зависит исключительно от скорости переключения муфт. Помимо всего прочего, роботизированные трансмиссии довольно компактны, а это очень важно для авто с малым объемом двигателя. Кроме того, КПП с двойным сцеплением потребляются на порядок больше энергии, в результате чего можно добиться отличной динамики автомобиля, а также экономии потребляемого бензина.
На сегодняшний день двойное сцепление устанавливается на трансмиссиях при производстве автомобилей:
- Фольксваген – КПП передач ДСГ;
- Порше – PDK;
- Форд и Вольво – коробки Пауэршифт;
- БМВ – DCT M Drivelogik;
- Мерседес Бенз – Спидшифт ДСТ;Ауди – С-Троник;
- Альфа Ромео – ТСТ;
- Митсубиси 0 Twin Clutch SST.

Все описанные выше трансмиссии оборудованы разработчиками гидроприводом. Исключением является только коробка автомат робот Рено – ЕДС – поскольку он оборудуется электроприводом сцепления и передач. Что касается времени переключения режимов, то здесь данный показатель составляет 0.29 секунд.
Самыми первыми производство и монтаж роботизированных коробок передач на свои автомобили наладили компании «Фольксваген» и «Ауди» – это произошло в 2003 году. Коробку передач С-Троник от Ауди можно назвать аналогом ДСГ, поскольку в целом она почти ничем не отличается от последней. Но в С-Троник КПП устанавливается продольно оси на заднее- и четырех-приводные машины.
Что касается коробки передач DCT M от компании «БМВ», то в систему ее управления была внедрена еще одна функция Драйвлоджик, в результате чего автомобилист получает возможность езды на одиннадцати различных передачах. Шестью из них можно управлять в режиме ручного включения, а остальные пять – это автоматические режимы переключения передач. Нужно добавить, что опция Драйвлоджик дает возможность агрегату адаптироваться под метод езды каждого отдельного водителя.
Нужно добавить, что опция Драйвлоджик дает возможность агрегату адаптироваться под метод езды каждого отдельного водителя.
Коробка автомат робот – принцип работы
Теперь поговорим о принципе функционировании этого типа агрегата. Работа КПП может проходить в нескольких режимах – автоматическом либо полуавтоматическом:
Если был активирован автоматический режим, то устройство ЭБУ управляет агрегатом с помощью исполнительных компонентов. Это функционирование происходит на основании использования установленных алгоритмов при получении сигналов со всех регуляторов.
Если говорить о полуавтоматическом режиме, то он присутствует на всех без исключения «роботах». Нужно отметить, что этот режим аналогичен функции Типтроник на АКПП, подробнее о которой вы также можете подробно прочитать на нашем ресурсе. Таким образом, автомобилист может по очереди переключать передачи с наименьшей на большую и наоборот. Это происходит с применением рычага или подрулевых переключателей.
Это происходит с применением рычага или подрулевых переключателей.
Урок 1: Робототехника с ScoutRiders — Miami EdTech
Добро пожаловать! Каждый урок включает в себя краткую предысторию для контекста. Затем вы пройдете серию контрольных точек, которые включают инструкции, которые помогут вам узнать о робототехнике. На уроках также могут быть задачи, которые дают возможность выполнять более сложные задачи. Получайте удовольствие и наслаждайтесь миром робототехники!
Представляем ScoutRider Привет! Меня зовут СкаутРайдер. Я приземлился на Марсе перед пилотируемой космической миссией, чтобы установить оборудование и исследовать место посадки. К сожалению, у меня была жесткая посадка, и часть важного оборудования разлетелась. Эти нужно собрать. Что еще хуже, мой уровень заряда батареи низкий. К счастью, некоторые дополнительные батареи не пострадали при столкновении. Если я смогу добраться до них, я смогу получить дополнительную энергию и использовать ее для сбора снаряжения.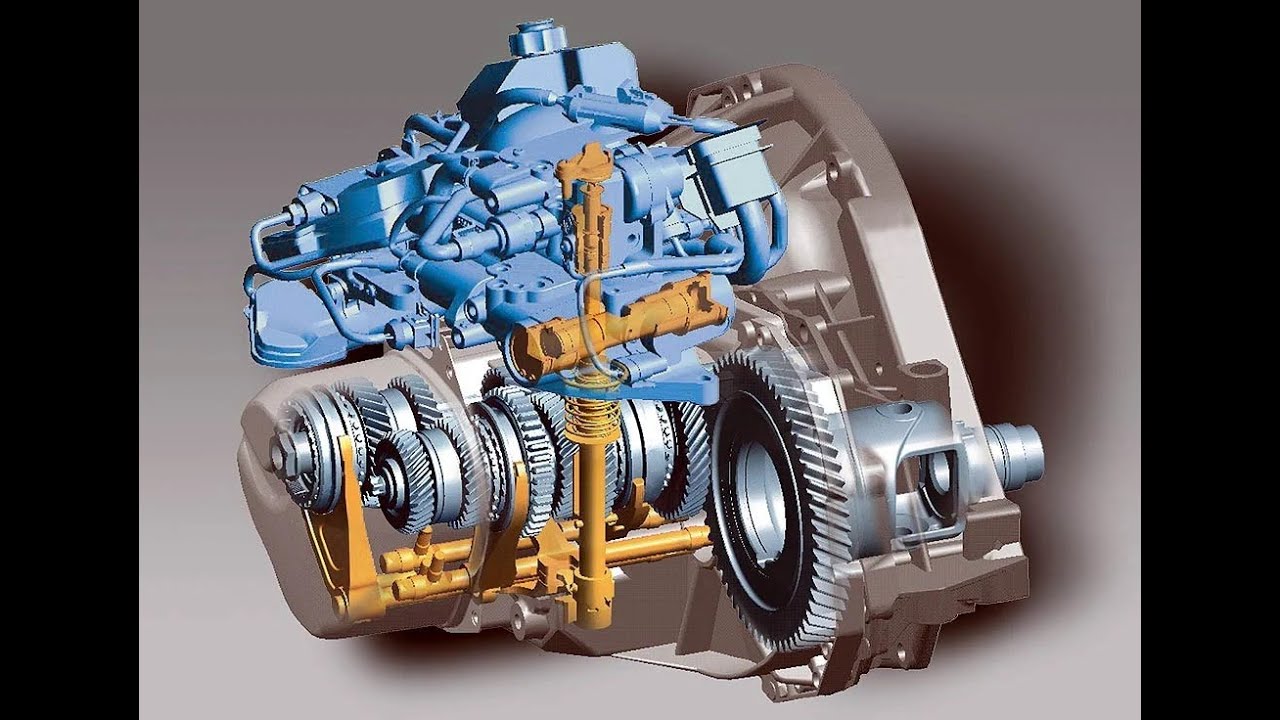 Мне нужно тщательно обдумывать свои решения, чтобы не исчерпать силы, прежде чем я соберу все, что нам нужно!
Мне нужно тщательно обдумывать свои решения, чтобы не исчерпать силы, прежде чем я соберу все, что нам нужно!
- ScoutRider начинает миссию с 3 единицами энергии.
- Сбор батареи дает вам еще 3 единицы энергии.
- Перемещение требует 1 единицы энергии.
- Каждый поворот на 90° потребляет 1 единицу энергии.
- Когда у ScoutRider заканчивается энергия, он перестает реагировать на команды.
Есть три головоломки, сложность которых увеличивается:
- Собрать красный кабель
- Собрать красный кабель + Зеленые платы
- Соберите красный кабель + зеленые печатные платы + синие шестерни
- robot.move_forward() — Переместиться на 1 клетку вперед.
- robot. move_backward() — Переместиться на 1 плитку назад.
- robot.turn_right() — Повернуть на 90° по часовой стрелке.
- robot.turn_left() — Повернуть на 90° против часовой стрелки.
 move_backward() — Переместиться на 1 плитку назад.
move_backward() — Переместиться на 1 плитку назад.Контрольная точка №1 — Начало работы
- Запустите симуляцию, выбрав Start в разделе SIMULATION в дереве проекта слева.
2. Вы должны увидеть ситуацию, как показано на рисунке ниже.
Контрольная точка № 2 — Перемещение робота
- Откройте файл кода Python, щелкнув Node: user_code в разделе NODES в дереве проекта.
- Попробуйте добавить следующий код под
# Ваш код начинается здесь:
robot.move_forward() - Теперь снова запустите симуляцию, выбрав «Сброс» в разделе «СИМУЛЯЦИЯ» в дереве проекта.
- Вы увидите, как ScoutRider переместится на один шаг вперед и остановится.

Контрольная точка №3. Поворот робота
- Давайте добавим вторую строку кода ниже нашего существующего кода:
robot.turn_right() - Снова сброс.
- Вы увидите, как ScoutRider сделает один шаг вперед и повернет направо.
Контрольно-пропускной пункт №4. Решите красную головоломку
Попробуйте собрать красный кабель. Это простая задача, но обратите внимание на уровень заряда батареи в строке состояния. Вам нужно будет изменить свой код.
Контрольная точка №5. Решите головоломку «Красный + Зеленый».
Теперь проверьте, сможете ли вы собрать красный кабель и все зеленые платы. Не забывайте, что у вашего робота есть команда двигаться назад.
Контрольная точка №6. Решите головоломку «Красный + Зеленый + Синий»
Теперь все может стать сложнее. Проверьте, сможете ли вы собрать Красный кабель, Зеленые платы и Синие шестерни
Задача Для сложной задачи вы можете написать автоматический алгоритм, чтобы найти решение этих головоломок. Вам нужно будет ввести позиции элементов в свой код. Если он работает, ваш алгоритм должен генерировать все правильные ходы. Возможно, вы не знаете, как решить эту проблему прямо сейчас, но вы освоите эти навыки в ближайшие несколько месяцев. Вы можете начать думать о том, как должен работать этот алгоритм, не занимаясь кодированием.
Вам нужно будет ввести позиции элементов в свой код. Если он работает, ваш алгоритм должен генерировать все правильные ходы. Возможно, вы не знаете, как решить эту проблему прямо сейчас, но вы освоите эти навыки в ближайшие несколько месяцев. Вы можете начать думать о том, как должен работать этот алгоритм, не занимаясь кодированием.
Автономная робототехника: финальный проект
Введение
В очередной раз в дело вмешались студенты инженерного факультета. силы, которых они не понимают. В ранние утренние часы декабря 12th 2017 участники несанкционированного проекта Capstone случайно выпустил огромное количество смертоносного дзета-излучения в коридоры второго этажа здания HHS в кампусе Джеймса Мэдисонский университет.
Неизвестное количество студентов и сотрудников находились в зоне поражения.
во время инцидента. Предполагалось, что эти лица имеют
был выведен из строя из-за воздействия дзета-излучения. Зета
радиационное отравление протекает в две стадии: на первой стадии
жертва теряет сознание и превращается в тыквоголового
чудовищность. (См. рис. 1 ниже.) Вторая стадия — смерть.
К счастью, большинство пострадавших полностью выздоравливают, если получают
лечение вовремя.
(См. рис. 1 ниже.) Вторая стадия — смерть.
К счастью, большинство пострадавших полностью выздоравливают, если получают
лечение вовремя.
Группа реагирования находится в пути с необходимым оборудованием. дезактивировать пораженные участки и оказать помощь пострадавшим. К сожалению, процесс обеззараживания идет медленно, и пострадавшие не так много времени. Чрезвычайно важно, чтобы мы определили местонахождение и личность всех пострадавших, чтобы группа реагирования могла максимально эффективно распределять свои ресурсы.
Высокие уровни дзета-излучения в загрязненных районах будут мешать любым беспроводным коммуникациям. Единственная надежда — отправить в полностью автономных роботах, чтобы найти жертв и сообщить о свои позиции.
Описание проекта
Готовое приложение будет принимать три аргумента командной строки:
предварительно созданный файл карты области для поиска, файл конфигурации
с указанием начального местоположения робота и файл данных со списком
набор именованных мест на предоставленной карте.
После запуска приложения никакого взаимодействия с роботом будет разрешено. Робот будет иметь ограниченное количество времени, чтобы поиск пострадавших в пределах зоны, обозначенной картой. К концу период времени, в течение которого робот должен вернуться в исходное положение и объявить, что готов сообщить о своих выводах.
Как только пользователь запросит отчет, щелкнув соответствующий кнопку, робот должен предоставить информацию о местоположении и личности для как можно больше жертв.
Вы можете использовать любые существующие узлы ROS в своем решении. Твой решение должно использовать Turtlebot, но вы можете перенастроить робота или добавить дополнительные датчики.
Приведенный код
Этот стартовый пакет организован следующим образом:
zeta_rescue/
пакет.xml
CMakeLists.txt
данные/
engeo_map.yaml
engeo_map.pgm
Initial_pose.yaml
ориентиры.csv
logitech_калибровка.yaml
маркер_0. pdf
запуск/
спасение. запуск
kinect_alvar_demo.launch
usb_cam_alvar_demo.launch
сообщение/
Жертва.msg
рвиз/
kinect_alvar_demo.rviz
usb_cam_alvar_demo.rviz
скрипты/
кнопка.py
config_ros_network.py
 pdf
запуск/
спасение. запуск
kinect_alvar_demo.launch
usb_cam_alvar_demo.launch
сообщение/
Жертва.msg
рвиз/
kinect_alvar_demo.rviz
usb_cam_alvar_demo.rviz
скрипты/
кнопка.py
config_ros_network.py
pdf
запуск/
спасение. запуск
kinect_alvar_demo.launch
usb_cam_alvar_demo.launch
сообщение/
Жертва.msg
рвиз/
kinect_alvar_demo.rviz
usb_cam_alvar_demo.rviz
скрипты/
кнопка.py
config_ros_network.py
-
engeo_map.yaml, engeo_map.pgm— это предварительно созданный карта коридора за пределами EnGeo 2002. Вы можете использовать это для тестирование вашего приложения, но вы не должны жестко кодировать свое решение для этой карты. -
initial_pose.yaml— этот файл конфигурации содержит ROS настройки параметров, представляющие предполагаемое начальное положение робот на предоставленной карте. Этот файл помещает робота на юг конец коридора за пределами EnGeo2002, лицом на север. -
ориентиры.csvЭтот файл содержит имена и координаты обозначенных мест на предоставленной карте. Этот информация может использоваться для сообщения о местонахождении жертвы: «Жертва 1 примерно в 1,3 метрах от питьевого фонтанчика». файл предоставляется для тестирования. может быть другой файл
предоставляется на момент проведения конкурса. -
logitech_coding.yaml— это калибровка файл для камер Logitech C905. Эти калибровочные данные необходимо использовать камеры logitech для обнаружения маркеров. -
marker_0.pdf— это образец альварного маркера в формате pdf которые вы можете использовать для тестирования. Rescue.launch— Это будет основной файл запуска для вашего поисково-спасательного приложения. Вам нужно будет изменить это файл для запуска любых узлов, которые используются в вашем приложении. Это должно быть можно запустить процесс поиска, выполнив следующие команда в окне терминала:roslaunch zeta_rescue Rescue.launch
Этот файл запуска настроен на прием трех аргументов командной строки. указав карту для использования, начальную позу на карте и набор ориентиры:
roslaunch zeta_rescue escape.
launch map_file:=new_map.yaml initial_pose:=provided_pose.yaml ориентир_файл:=new_landmarks.csv
kinect_alvar_demo.rviz,usb_cam_alvar_demo.rviz— Эти файлы запуска демонстрируют использование узла ar_track_alvar для поиск маркеров на изображениях.button.pyЭтот узел ROS публикует пустой сообщение в темуreport_requestedвсякий раз, когда кнопка нажата.config_ros_network.py— Этот скрипт автоматизирует процесс настройки робота-ноутбука для работы с ROS на нескольких компьютерах.
 файл предоставляется для тестирования. может быть другой файл
предоставляется на момент проведения конкурса.
файл предоставляется для тестирования. может быть другой файл
предоставляется на момент проведения конкурса.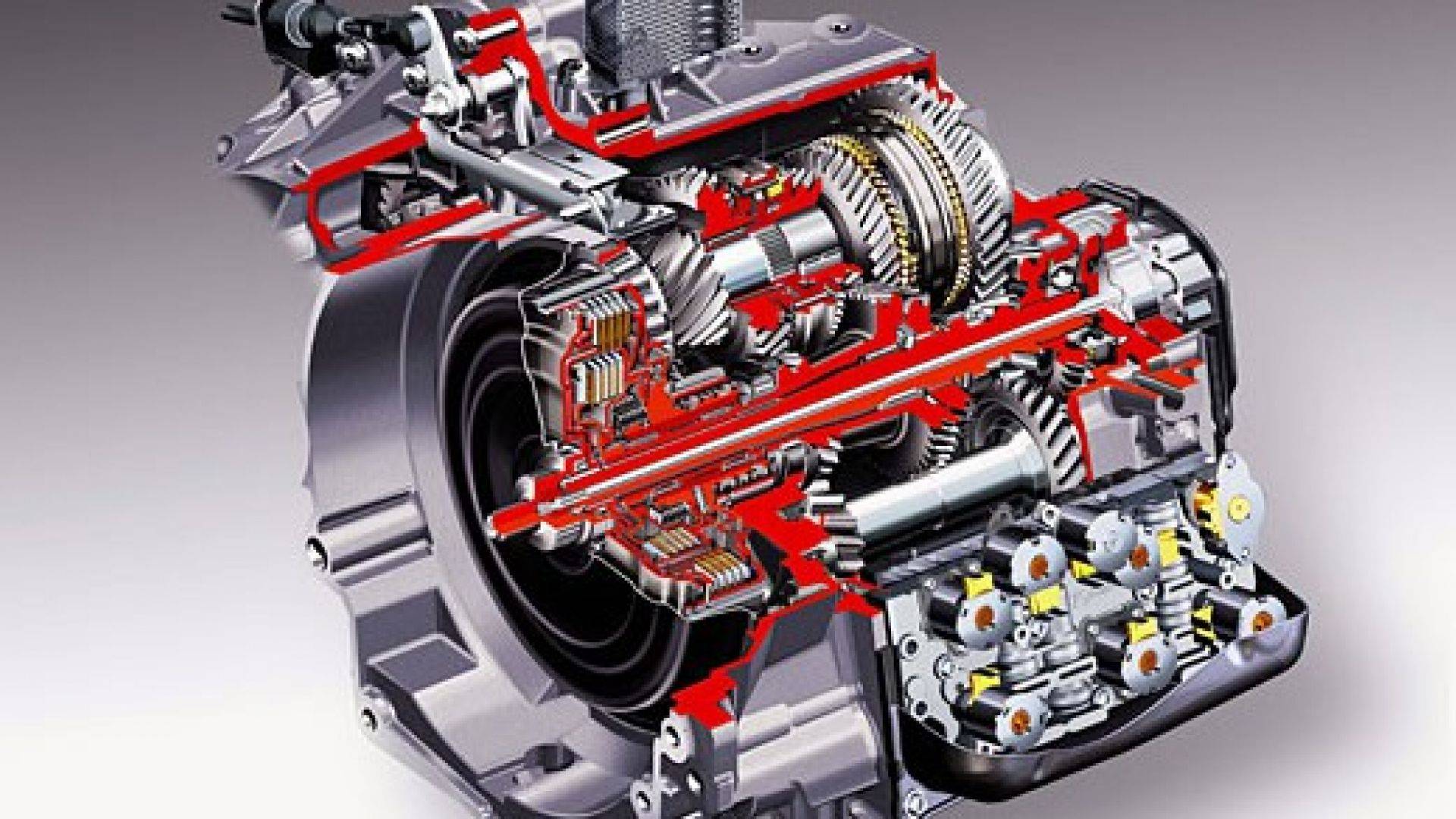 launch map_file:=new_map.yaml initial_pose:=provided_pose.yaml ориентир_файл:=new_landmarks.csv
launch map_file:=new_map.yaml initial_pose:=provided_pose.yaml ориентир_файл:=new_landmarks.csv
Минимальные требования
Будет некоторое количество «жертв», распределенных по карте. область. Каждая жертва будет выглядеть примерно так:
Рисунок 1
Черный квадрат в центре поля — это маркер, который должен
быть обнаруженным пакетом ar_pose. Красная бирка с именем будет содержать
уникальное имя для каждой жертвы.
Во время выполнения ваше приложение должно опубликовать информацию о жертве в следующих трех темах:
-
/victim_image (sensor_msgs/Image)— Изображение последняя обнаруженная жертва. -
/victim_marker (visualization_msgs/Marker)— RViz маркер, показывающий местонахождение последнего обнаруженного жертва. Это должен быть сферический оранжевый маркер диаметром 0,5 метра. диаметр. Он должен оставаться видимым до выхода из приложения. -
/victim (zeta_rescue/Victim)Это сообщение будет содержать полную информацию об одной жертве, включая изображение и местоположение. Обратите внимание, что изображение здесь не обязательно должно совпадать с изображение опубликовано в /victim_image. Изображение в этом сообщении должно обеспечить как можно более четкое представление о пострадавшем, в идеале с разборчивый вид именной бирки.
Кроме того, при нажатии кнопки отчета робот должен представить сводный отчет с описанием местонахождения обнаруженных жертв.
Для полного зачета ваше приложение должно надежно распознавать жертв и сообщать о своем местонахождении в соответствии с приведенной выше спецификацией.
Можно получить полный кредит, даже если ваш робот не обнаружить всех жертв во время соревнования.
Конкурс
Заключительные презентации проектов будут организованы в формате дружеского соревнование между проектными командами. Результаты будут подсчитаны на на основе количества жертв, которые каждая команда находит и сообщает.
Точная система подсчета очков будет опубликована по мере приближения даты конкурса. ближе. Будут учитываться следующие факторы:
- Неправильные отчеты: баллы будут вычтены за сообщение о несуществующих жертвах.
- Повторяющиеся отчеты: баллы будут вычтены за многократное сообщение об одной и той же жертве.
- Качество изображения: баллы будут вычтены, если имя жертвы неразборчиво.
- Качество отчета: за креатив будут доступны бонусные баллы
и удобный интерфейс отчетности. Например, устные отчеты.
используя названные места, вы получите бонусные очки.
- Вмешательство: будут штрафы за ручное вмешательство во время поиска: т.е. переустановка локализации или разблокировать робота.
- Компьютерное зрение: пакет ar_pose делает этот проект значительно проще, но и менее реалистично. Будет точка бонус, если вы разработаете решение, способное находить жертв без с помощью маркеров.
 Например, устные отчеты.
используя названные места, вы получите бонусные очки.
Например, устные отчеты.
используя названные места, вы получите бонусные очки.Рубрика оценки не будет явно вознаграждать умные стратегии поиска, но случайное блуждание, вероятно, приведет к меньшему количеству обнаружений, чем систематический поиск.
Сроки и оценка
Ваша оценка за этот проект будет основываться на качестве вашего окончательное решение, а также на достижение надлежащего прогресса на промежуточных контрольно-пропускные пункты.
Для каждой контрольной точки необходимо:
- Создайте выпуск с соответствующим именем номер КПП: «КПП1», «КПП2» и т.д.
- Разместите видео с комментариями на YouTube, демонстрирующее текущую функциональность.
- Предоставьте краткий текстовый документ, включающий:
- Ссылка на демонстрацию YouTube.
- Описание текущего состояния кода: что работает, что не делает и т.д.
- Любые инструкции, которые мне понадобятся для проверки вашего текущего кода.
- План развития следующего контрольно-пропускного пункта.
docв вашем пакете.

Нет конкретных требований к функциональности, которая должна быть завершено к крайнему сроку каждой контрольной точки. Тем не менее, для полного кредита, есть должен быть четкий прогресс в функциональности от одной контрольной точки до следующий. Кроме того, код, представленный для каждой контрольной точки, должен представлять собой полное исполняемое приложение. Я должен быть в состоянии запустить ваш код после каждой отправки и оценивайте уровень функциональности.
В следующем расписании контрольно-пропускных пунктов есть пример такой вещи.
 с., для больших площадей – профессиональные двигатели мощностью 9 л.с.
с., для больших площадей – профессиональные двигатели мощностью 9 л.с. Для вашего удобства предлагаем несколько способов оплаты (в том числе и возможность оформления кредита), хорошие скидки, регулярные акции и распродажи, а также оперативную доставку по России. Доставка по МО и Владимирской области осуществляется на льготных условиях.
Для вашего удобства предлагаем несколько способов оплаты (в том числе и возможность оформления кредита), хорошие скидки, регулярные акции и распродажи, а также оперативную доставку по России. Доставка по МО и Владимирской области осуществляется на льготных условиях. Каждый из них имеет свои особенности и достоинства.
Каждый из них имеет свои особенности и достоинства.

 org
org Первым кораблем с «русским сердцем» стал строящийся фрегат «Адмирал Головко». По значимости это событие можно сравнить с большими авиапремьерами конца 2020 года.
Первым кораблем с «русским сердцем» стал строящийся фрегат «Адмирал Головко». По значимости это событие можно сравнить с большими авиапремьерами конца 2020 года.


 В ОДК уже создается целая линейка силовых установок: разработаны три двигателя в диапазоне мощностей от 7 до 27,5 тыс. л. с., в перспективе – создание двигателя мощностью до 35 тыс. л. с. На сегодняшний день в ОДК освоено производство морских двигателей для всех надводных кораблей ВМФ России, оснащающихся ГТД. Это не только фрегаты, это и корветы – малые сторожевые корабли, и десантные суда на воздушной подушке, и другая морская техника.
В ОДК уже создается целая линейка силовых установок: разработаны три двигателя в диапазоне мощностей от 7 до 27,5 тыс. л. с., в перспективе – создание двигателя мощностью до 35 тыс. л. с. На сегодняшний день в ОДК освоено производство морских двигателей для всех надводных кораблей ВМФ России, оснащающихся ГТД. Это не только фрегаты, это и корветы – малые сторожевые корабли, и десантные суда на воздушной подушке, и другая морская техника.
 А в ОДК уже ведется работа по созданию двигателей следующего поколения – еще более мощных и совершенных.
А в ОДК уже ведется работа по созданию двигателей следующего поколения – еще более мощных и совершенных.
 7L Crate Engine
7L Crate Engine 00 — $7369,99
00 — $7369,99 с. / 425 футо-фунтов. Двигатель ящика TQ
с. / 425 футо-фунтов. Двигатель ящика TQ с. / 475 TQ
с. / 475 TQ -LBS.
-LBS. с., 495 футов-фунтов
с., 495 футов-фунтов с., 495 футов-фунтов]
с., 495 футов-фунтов] 08.23, в зависимости от наличия у производителя.
08.23, в зависимости от наличия у производителя.
 При малом объеме рабочей жидкости такой гидротрансформатор резко снижает частоту вращения турбинного колеса (выходного вала) при увеличении нагрузки на него; при заполнении полости жидкостью рабочая характеристика гидротрансформатора становится все более жесткой, достигая максимума при полном заполнении. При этом частота вращения входного вала (насосного колеса) подразумевается конкретной постоянной.
При малом объеме рабочей жидкости такой гидротрансформатор резко снижает частоту вращения турбинного колеса (выходного вала) при увеличении нагрузки на него; при заполнении полости жидкостью рабочая характеристика гидротрансформатора становится все более жесткой, достигая максимума при полном заполнении. При этом частота вращения входного вала (насосного колеса) подразумевается конкретной постоянной.
 Число сателлитов в одном ряде преимущественно шесть, хотя для мощных устройств с малым диапазоном варьирования их может быть до 12. Подшипники 6 осей 11 находятся на одном конце поворотных рычагов 21, на других концах которых размещены противовесы 12, одна группа которых снабжена роликами 13, находящимися в фасонных прорезях 22 диска 14, связанного с выходным валом 19.
Число сателлитов в одном ряде преимущественно шесть, хотя для мощных устройств с малым диапазоном варьирования их может быть до 12. Подшипники 6 осей 11 находятся на одном конце поворотных рычагов 21, на других концах которых размещены противовесы 12, одна группа которых снабжена роликами 13, находящимися в фасонных прорезях 22 диска 14, связанного с выходным валом 19.
 В таком случае рычаг 15 будет связан с педалью управления скоростью автомобиля, с дополнительным усилителем или без него.
В таком случае рычаг 15 будет связан с педалью управления скоростью автомобиля, с дополнительным усилителем или без него. Нажимные пружины 4 и 9 при этом упруго деформируются за счет расклинивающего действия сателлитов, что при вращении фрикционных дисков связано с ничтожным сопротивлением трению, и имея специально подобранные характеристики «сила-деформация», обеспечивают оптимальный по КПД нажим фрикционных дисков, с запасом β = 1,25…1,5. Прорезь 22 может быть выполнена и такого профиля, когда она лишь уменьшает или полностью устраняет усилие перевода ролика 13 при изменении передаточного отношения. Таким образом, свойство прогрессивности является как бы «врожденным» свойством, присущим конструкции вариатора, и достигается лишь подбором формы прорези 22 и жесткости пружины 16.
Нажимные пружины 4 и 9 при этом упруго деформируются за счет расклинивающего действия сателлитов, что при вращении фрикционных дисков связано с ничтожным сопротивлением трению, и имея специально подобранные характеристики «сила-деформация», обеспечивают оптимальный по КПД нажим фрикционных дисков, с запасом β = 1,25…1,5. Прорезь 22 может быть выполнена и такого профиля, когда она лишь уменьшает или полностью устраняет усилие перевода ролика 13 при изменении передаточного отношения. Таким образом, свойство прогрессивности является как бы «врожденным» свойством, присущим конструкции вариатора, и достигается лишь подбором формы прорези 22 и жесткости пружины 16. Такой способ прижима фрикционных элементов вариатора, являясь наиболее простым из известных, позволяет оптимизировать его по КПД применительно к современной автоматической системе управления скоростью автомобиля. Система эта разработана в МГТУ «МАМИ» под руководством проф. В.В. Селифонова, и суть ее кратко выражается в том, что основную часть работы автомобиля управление скоростью машины ведется при наиболее экономичной (практически полной) подаче топлива в двигатель только за счет изменения передаточного отношения вариатора. Позволим себе доступно пояснить суть этого способа на примере автомобиля с обычной ступенчатой коробкой передач. Допустим, что наибольшая скорость автомобиля, соответствующая максимальной мощности двигателя, достигается на прямой передаче в коробке передач, то есть когда на главную передачу поступает частота вращения двигателя. Если мы включаем так называемые «повышающие» или правильнее «экономические» передачи, допустим 0,9, 0,8, 0,7 и т.д., то скорость движения автомобиля, как известно, снижается, а экономичность – повышается.
Такой способ прижима фрикционных элементов вариатора, являясь наиболее простым из известных, позволяет оптимизировать его по КПД применительно к современной автоматической системе управления скоростью автомобиля. Система эта разработана в МГТУ «МАМИ» под руководством проф. В.В. Селифонова, и суть ее кратко выражается в том, что основную часть работы автомобиля управление скоростью машины ведется при наиболее экономичной (практически полной) подаче топлива в двигатель только за счет изменения передаточного отношения вариатора. Позволим себе доступно пояснить суть этого способа на примере автомобиля с обычной ступенчатой коробкой передач. Допустим, что наибольшая скорость автомобиля, соответствующая максимальной мощности двигателя, достигается на прямой передаче в коробке передач, то есть когда на главную передачу поступает частота вращения двигателя. Если мы включаем так называемые «повышающие» или правильнее «экономические» передачи, допустим 0,9, 0,8, 0,7 и т.д., то скорость движения автомобиля, как известно, снижается, а экономичность – повышается. Частота вращения коленчатого вала двигателя при этом также снижается. Разумеется, с некоторыми нюансами в системе подачи топлива, особенно эффективными для дизелей и двигателей с непосредственным впрыском, экономичность автомобиля (снижение путевого расхода топлива) будет повышаться вплоть до достижения неустойчивых частот вращения коленчатого вала. Таким образом, управление скоростью ведется, с первого взгляда, парадоксальным образом – для снижения скорости включаются все более «высшие» передачи (то есть передаточное отношение снижается), а для повышения скорости передаточное отношение повышается.
Частота вращения коленчатого вала двигателя при этом также снижается. Разумеется, с некоторыми нюансами в системе подачи топлива, особенно эффективными для дизелей и двигателей с непосредственным впрыском, экономичность автомобиля (снижение путевого расхода топлива) будет повышаться вплоть до достижения неустойчивых частот вращения коленчатого вала. Таким образом, управление скоростью ведется, с первого взгляда, парадоксальным образом – для снижения скорости включаются все более «высшие» передачи (то есть передаточное отношение снижается), а для повышения скорости передаточное отношение повышается. При этом, если сравнить, допустим, движение на скорости 100 км/ч по шоссе на легковом автомобиле с мощным двигателем, в первом случае достигаемую уменьшением подачи топлива, а во втором – включением соответствующего «овердрайва», то есть экономической передачи, то путевой расход во втором случае может уменьшиться почти на треть. Но ввиду того, что этих «экономических» передач обычно немного, мы, к сожалению, в большинстве случаев так скоростью автомобиля не управляем. А вариатор предоставляет нам бесчисленное множество этих «экономических» передач!
При этом, если сравнить, допустим, движение на скорости 100 км/ч по шоссе на легковом автомобиле с мощным двигателем, в первом случае достигаемую уменьшением подачи топлива, а во втором – включением соответствующего «овердрайва», то есть экономической передачи, то путевой расход во втором случае может уменьшиться почти на треть. Но ввиду того, что этих «экономических» передач обычно немного, мы, к сожалению, в большинстве случаев так скоростью автомобиля не управляем. А вариатор предоставляет нам бесчисленное множество этих «экономических» передач! На частичных же режимах КПД вариатора может несколько (на 2…3%) уменьшиться из-за повышения β, но это уменьшение будет незаметно из-за сильного уменьшения КПД двигателя на этих режимах. К тому же современный способ регулирования скорости автомобиля с бесступенчатой передачей оставляет работе двигателя на частичных режимах весьма малую роль.
На частичных же режимах КПД вариатора может несколько (на 2…3%) уменьшиться из-за повышения β, но это уменьшение будет незаметно из-за сильного уменьшения КПД двигателя на этих режимах. К тому же современный способ регулирования скорости автомобиля с бесступенчатой передачей оставляет работе двигателя на частичных режимах весьма малую роль. 3. Центральная часть мотор-вариатора
3. Центральная часть мотор-вариатора
 Следует заметить, что КПД опытного образца вариатора, мощность которого в десятки раз меньше мощности передаваемой автомобильной коробкой передач, естественно, меньше, чем полноразмерной конструкции. К тому же смазка здесь осуществлялась погружением, что для планетарных передач неэкономично, и в вариаторной коробке передач она заменена струйной подачей жидкого смазочного материала (ЖСМ). Тем не менее, при малых передаточных отношениях – от 1,3 до 2, что соответствует частотам вращения n = 1100…700 об/мин, КПД изменяется от 0,96 до 0,90, что достаточно много. Значение КПД, равное η = 0,75, достигается при передаточном отношении равном i = 7, что соответствует троганию с места автомобиля. Для реальной полноразмерной конструкции, значения КПД при высшем передаточном отношении ожидается около 0,80…0,85.
Следует заметить, что КПД опытного образца вариатора, мощность которого в десятки раз меньше мощности передаваемой автомобильной коробкой передач, естественно, меньше, чем полноразмерной конструкции. К тому же смазка здесь осуществлялась погружением, что для планетарных передач неэкономично, и в вариаторной коробке передач она заменена струйной подачей жидкого смазочного материала (ЖСМ). Тем не менее, при малых передаточных отношениях – от 1,3 до 2, что соответствует частотам вращения n = 1100…700 об/мин, КПД изменяется от 0,96 до 0,90, что достаточно много. Значение КПД, равное η = 0,75, достигается при передаточном отношении равном i = 7, что соответствует троганию с места автомобиля. Для реальной полноразмерной конструкции, значения КПД при высшем передаточном отношении ожидается около 0,80…0,85. Ни один вариатор другого типа – тороидальный, шаровой, конструкции Е.И. Пирожкова и т.д. настолько не подходит к планетарной схеме, как дисковый, по указанной причине. Вариаторы с гибкой связью (ременный, цепной) вообще не могут работать по планетарной схеме, а планетарная схема по сравнению со схемами с остановленным водилом (обычными схемами) обеспечивает снижение потерь на высших передачах не менее чем втрое, что особенно важно для автомобилей.
Ни один вариатор другого типа – тороидальный, шаровой, конструкции Е.И. Пирожкова и т.д. настолько не подходит к планетарной схеме, как дисковый, по указанной причине. Вариаторы с гибкой связью (ременный, цепной) вообще не могут работать по планетарной схеме, а планетарная схема по сравнению со схемами с остановленным водилом (обычными схемами) обеспечивает снижение потерь на высших передачах не менее чем втрое, что особенно важно для автомобилей. Cтатьи, 1997
Cтатьи, 1997
 Наверх
Наверх each(imageUrls, функция(imageUrl){}}
each(imageUrls, функция(imageUrl){}} ..
.. , Ltd, предшественник которой был государственным военным предприятием по производству пресс-форм, была основана в 1965 году. Посвятите себя тому, чтобы стать ведущим предприятием в Китае с миссией «Благодаря ведущим в отрасли технологиям редуктора и трансмиссии, помогите Китаю». Машины и оборудование лидируют в мире!»
, Ltd, предшественник которой был государственным военным предприятием по производству пресс-форм, была основана в 1965 году. Посвятите себя тому, чтобы стать ведущим предприятием в Китае с миссией «Благодаря ведущим в отрасли технологиям редуктора и трансмиссии, помогите Китаю». Машины и оборудование лидируют в мире!» 5 неон
5 неон 8
8 is_selected, ‘-is-highlighted’: $data.is_highlighted },
visible: $data.is_displayed
» data-type=»manufacturer» data-all_devices=»0″/>
is_selected, ‘-is-highlighted’: $data.is_highlighted },
visible: $data.is_displayed
» data-type=»manufacturer» data-all_devices=»0″/> selectItem.bind($data, ‘manufacturer’)
» data-type=»placeholder»> Производитель
selectItem.bind($data, ‘manufacturer’)
» data-type=»placeholder»> Производитель is_selected, ‘-is-highlighted’: $data.is_highlighted },
visible: $data.is_displayed
» data-type=»engine» data-nosubmit=»1″/>
is_selected, ‘-is-highlighted’: $data.is_highlighted },
visible: $data.is_displayed
» data-type=»engine» data-nosubmit=»1″/> заглушка деактивации
заглушка деактивации 6 Dual VVTI (I Typ E150), 1598 см3, 91 кВт (124 л.с.), 157 Нм
6 Dual VVTI (I Typ E150), 1598 см3, 91 кВт (124 л.с.), 157 Нм ph
ph